
Visualization Analysis of Construction Robots Based on Knowledge Graph
Abstract
1. Introduction
2. Data Collection and Research Methods
2.1. Data Collection
2.2. Research Methods
3. Results
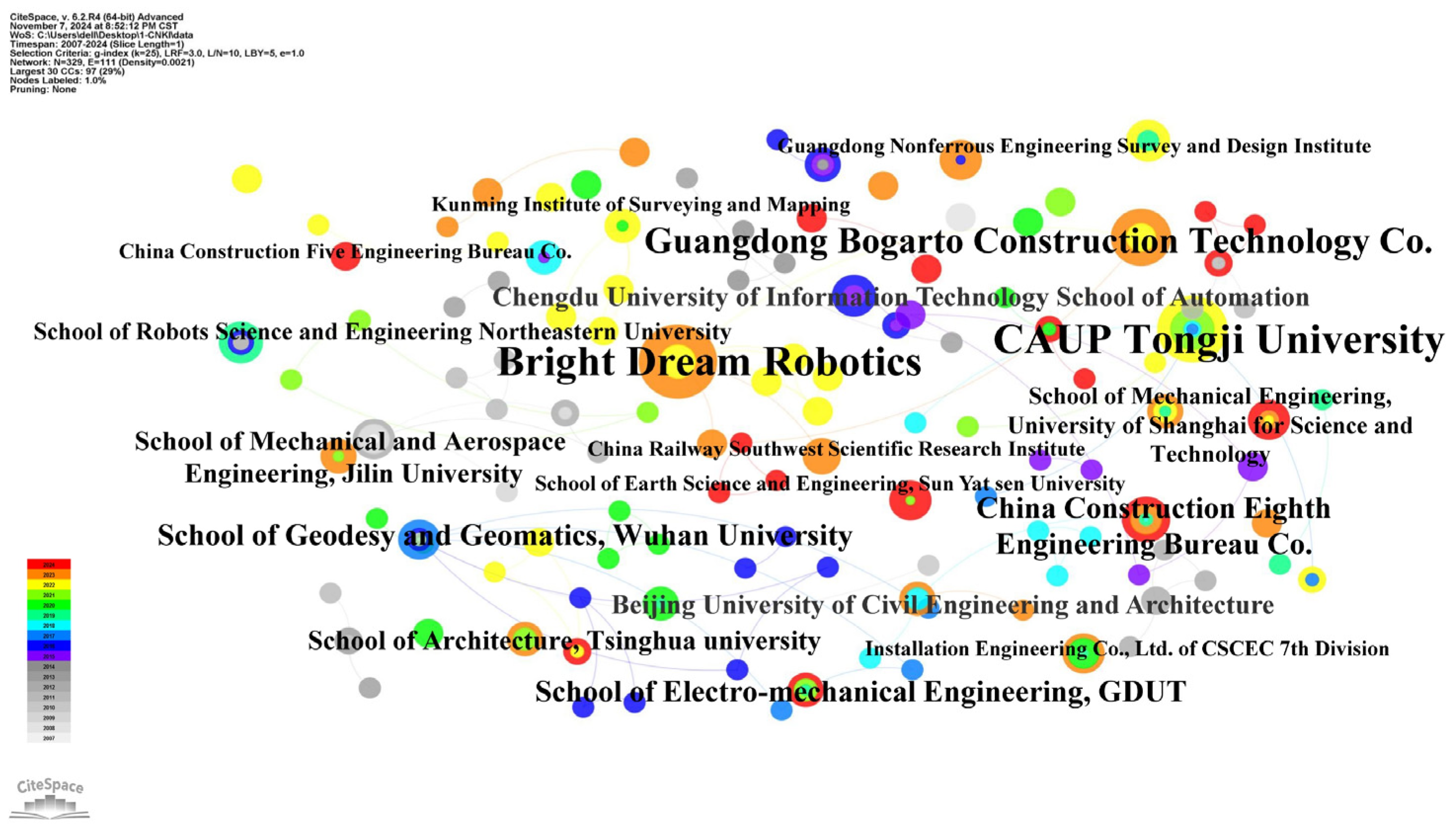
3.1. Analysis of Institutional Cooperation Network
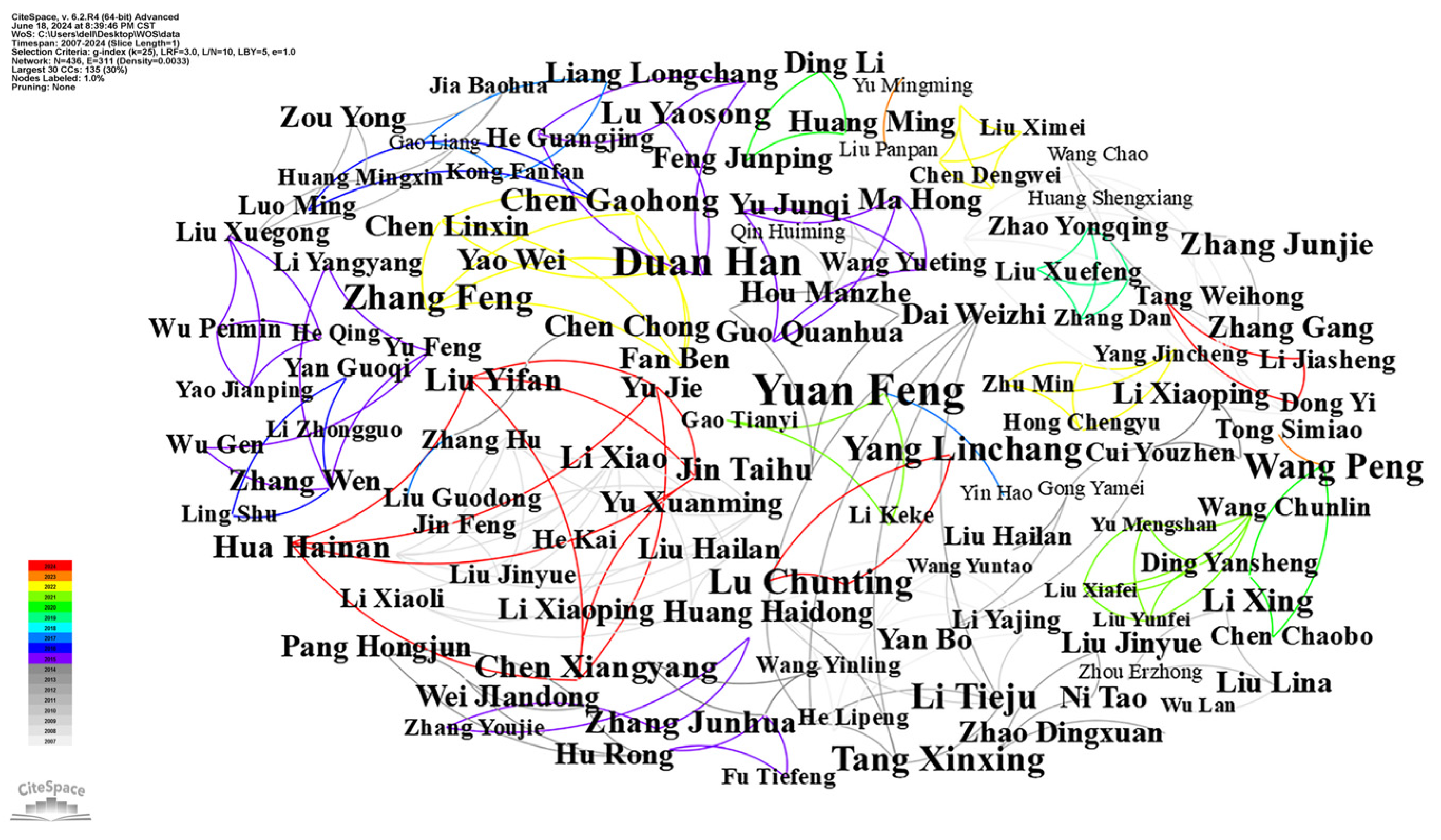
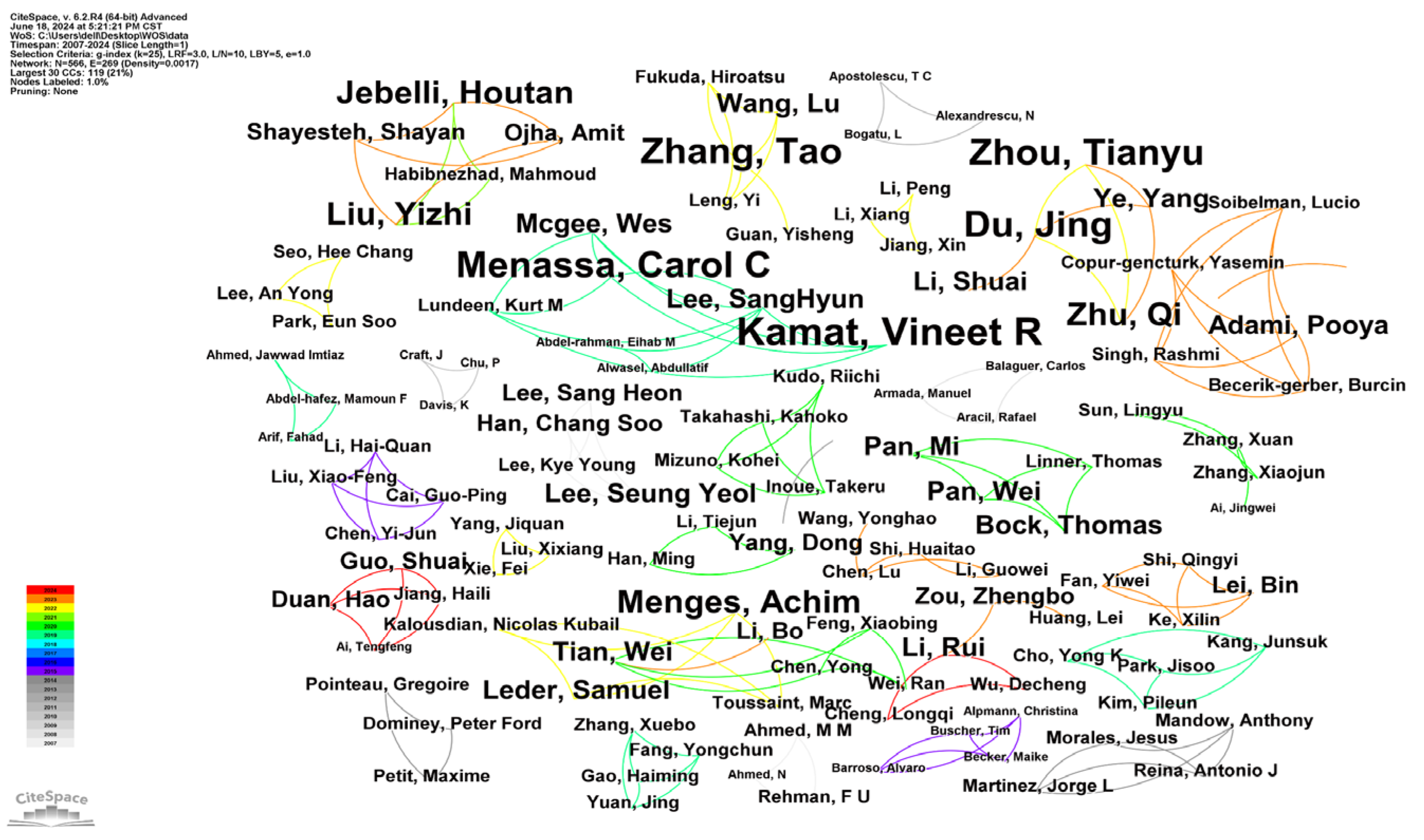
3.2. Analysis of Author Co-Occurrence Network
3.3. Analysis of Hot Research Topics
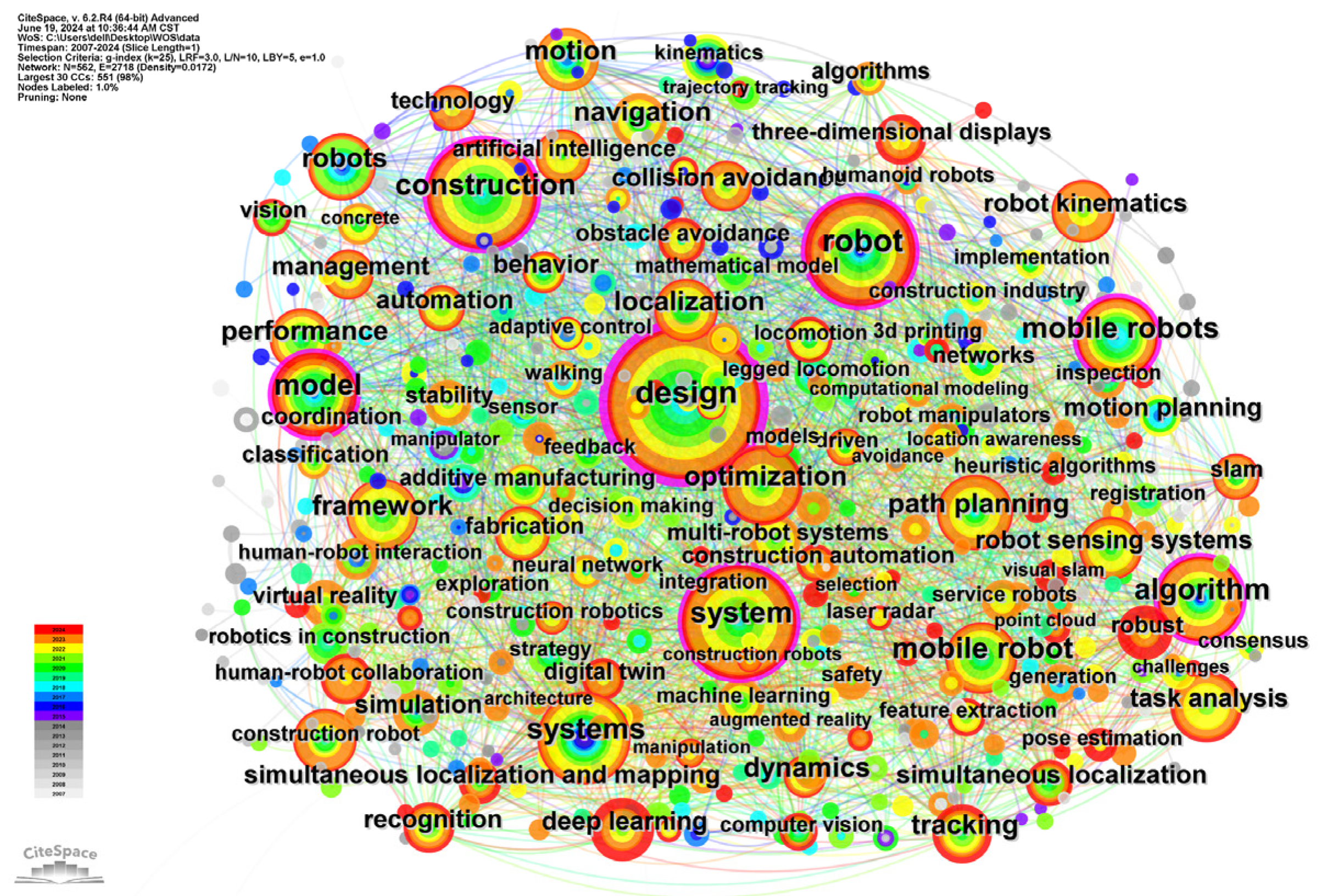
3.3.1. Keyword Co-Occurrence
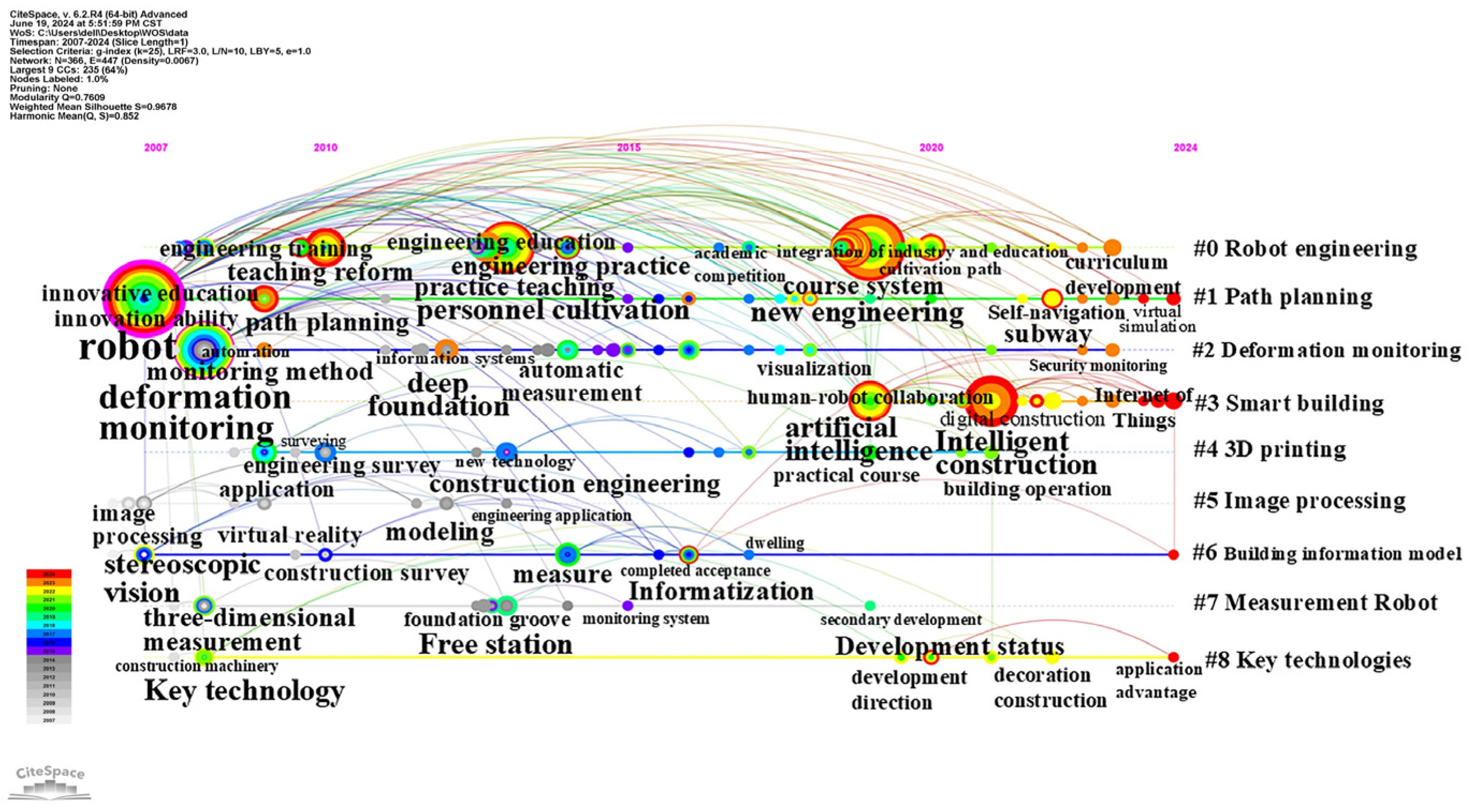
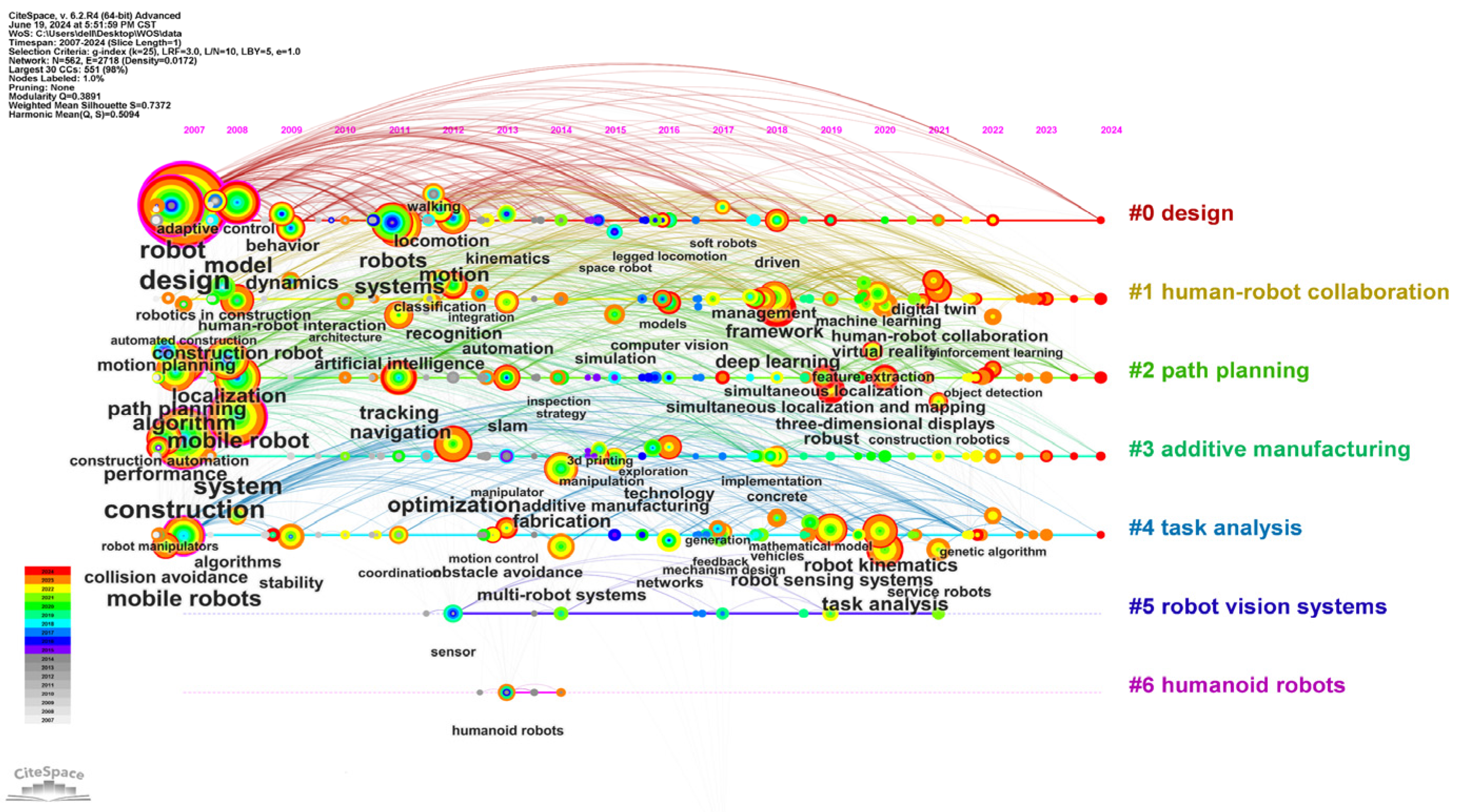
3.3.2. Keywords Cluster Analysis
3.3.3. Analysis of Research Hotspot
- 1.
- Path planning
- 2.
- Deformation monitoring
- 3.
- Intelligent construction
- 4.
- 3D printing
- 5.
- Human-robot collaboration
- 6.
- Task analysis
- 7.
- Robot vision systems
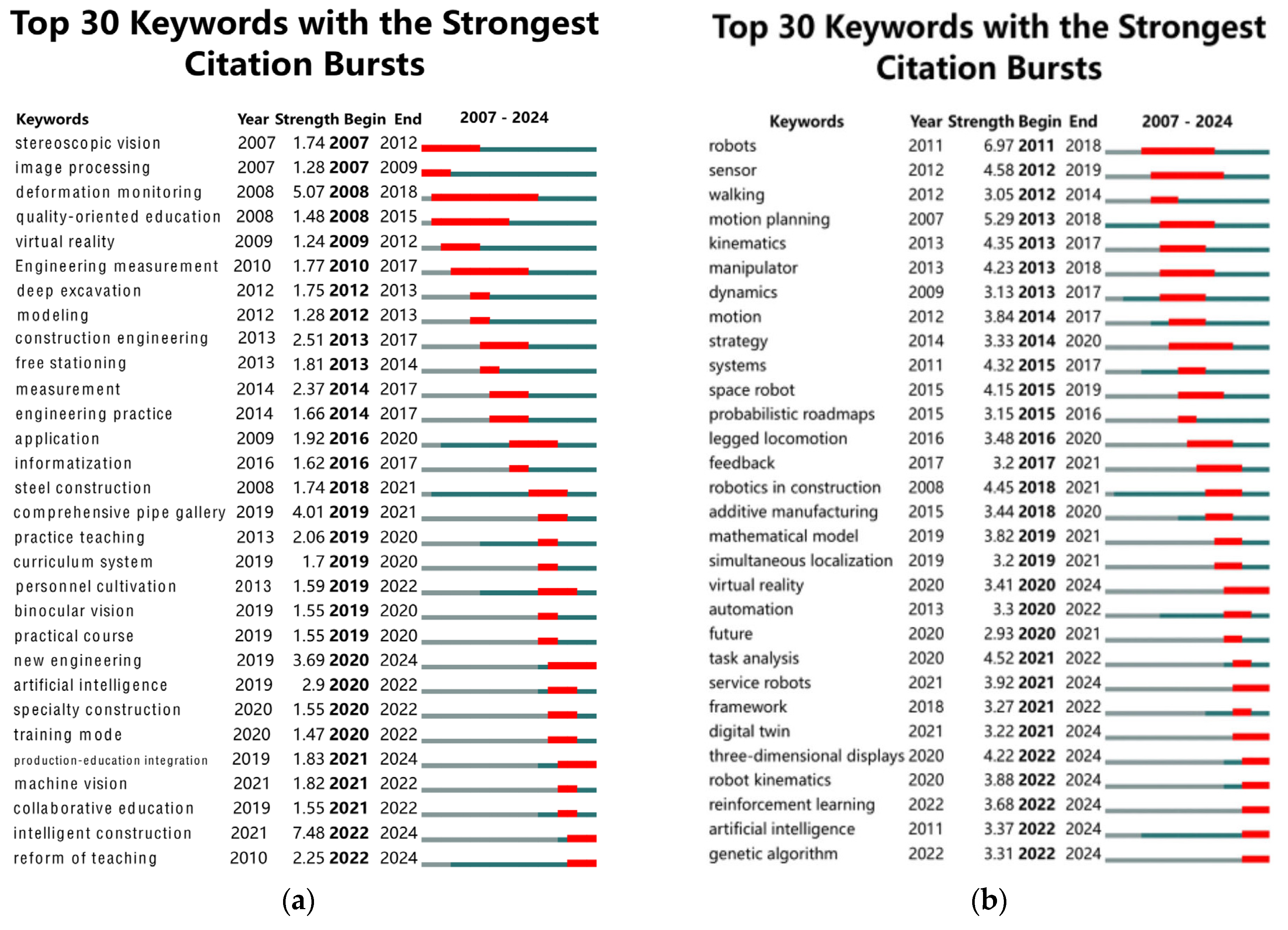
3.4. Analysis of Research Trends
- 1.
- Keyword terms exhibiting strong emergence intensity include “intelligent construction” and “robots”. The application of construction robots is contingent upon the overarching framework of intelligent construction. Robots can perform tasks automatically, either by following a preset program or by operating autonomously based on principles developed through artificial intelligence technology. In the 1980s, the Shimizu Corporation of Japan pioneered the development of the world’s first construction robot, the SSR-I refractory coating robot [51]. Since that time, countries have increasingly prioritized research and development in the field of construction robots. The application of robotic technology is now considered a pivotal area of focus within the construction industry and represents a significant trend in current research.
- 2.
- The term “deformation monitoring” has the longest documented history of use, having been practiced for a decade. The primary objective of deformation monitoring is to ensure the safety and stability of engineering structures while providing a scientific foundation for the construction and maintenance of these structures. In the current context of smart construction, deformation monitoring has become more intelligent and automated [52]. Construction robots possess the potential to facilitate real-time monitoring and early warning systems for buildings, forming an integral part of the deformation monitoring process. To better align with evolving detection requirements, construction robots must undergo continuous enhancements to optimize the performance of their sensors, measurement equipment, and other associated components. Deformation monitoring constitutes a pivotal aspect of an intelligent construction system and serves as a critical driver for the intelligent transformation and modernization of the entire construction industry.
- 3.
- The genetic algorithm is a term that has recently emerged, rooted in the principles of genetics. It optimizes problem-solving gradually by simulating the natural processes of selection, crossover, and mutation. The introduction of genetic algorithms has significantly enhanced the performance and efficiency of construction robot systems. These algorithms are applied not only to optimize the robot’s path planning but also to refine the design parameters of the robots.
4. Discussion
- 1.
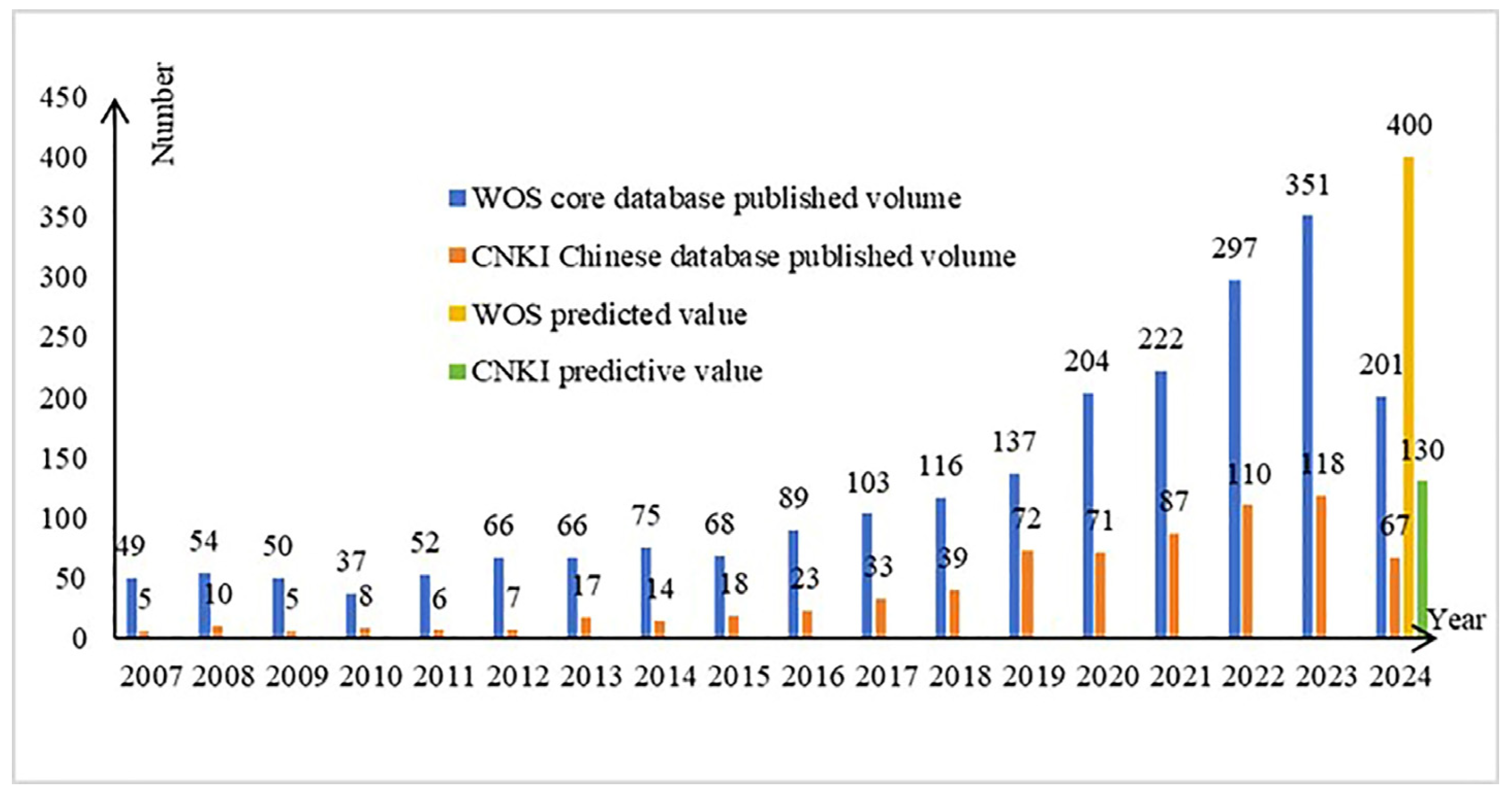
- Over the past 18 years, the number of research articles pertaining to construction robots has steadily increased, with a particularly marked surge in publications commencing in 2018. Before 2013, the volume of publications in this field was nearly negligible. This trend indicates a gradual expansion in the scope of research and a growing sophistication in the content being explored. Moreover, it underscores the pivotal role of construction robots as essential tools for the intelligent upgrading of the construction industry, highlighting their significance as a prominent area of current research within this sector.
- 2.
- The analysis of institutions and authors reveals that cooperation within the field of construction robots is limited and fragmented, lacking a cohesive research system with a core group of authors. Consequently, enhancing communication networks among various research institutions and author teams is of considerable significance. Such improvements are essential to advancing the in-depth development and broad application of construction robot technology.
- 3.
- A comprehensive keyword analysis indicates that current research hotspots in the field of construction robots are predominantly centered on path planning, deformation monitoring, vision systems, image processing, and other technological innovations in research and development. Significant advancements have been achieved in these areas in recent years. However, attention has recently started to shift towards the practical applications of robots in building construction, encompassing considerations such as environmental constraints, safety, technological maturity, and human-robot collaboration. These issues related to practical applications are also subjects of ongoing research.
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Tian, C.; Geng, J.; Wang, L. Supporting Role and Trend Forecast of Construction Industry in China’s Economy. Constr. Econ. 2016, 37, 10–15. [Google Scholar]
- Chen, T.; Zhang, L.; Ma, X. Exploring the Opportunities and Challenges of Cultivating Intelligent Construction Professionals in the Context of Artificial Intelligence. Educ. Prog. 2023, 13, 4563–4569. [Google Scholar]
- Chen, C.; Li, X.; Qiu, Z.; Yao, W.; Zhu, H. Research Progress of Construction Robots. J. Archit. Civ. Eng. 2022, 39, 58–70. [Google Scholar]
- Zang, X. Implementation program of “Robot +” application action issued. Shanghai Educ. 2023, 07, 5. [Google Scholar]
- Chen, Y.; Chen, C.; Liu, Z.; Hu, Z.; Wang, X. The methodology function of Cite Space mapping knowledge domains. Stud. Sci. Sci. 2015, 33, 242–253. [Google Scholar]
- Ye, J.; Fanyang, Y.; Wang, J.; Meng, S.; Tang, D. A Literature Review of Green Building Policies: Perspectives from Bibliometric Analysis. Buildings 2024, 14, 2607. [Google Scholar] [CrossRef]
- Liu, D.; Zhang, H. Research Hotspots and Frontiers of Internet Public Opinion in Chinese Colleges and Universities. Inf. Sci. 2022, 40, 176–185. [Google Scholar]
- Zheng, H.; Kan, X.; Chen, S.; Yuan, H. The Evolution Path and Hotspot Analysis of the Research on Aging Adaptation of Old Residential Community. Constr. Econ. 2023, 44, 72–80. [Google Scholar]
- Bi, Q. Document Clustering Analysis on Semi-Supervised-Related Medical Literatures. Master’s Thesis, Lanzhou University, Lanzhou, China, 2023. [Google Scholar]
- Xie, C.; Feng, T.; Hu, L. A Bibliometric Analysis of the Outdoor Thermal Environment Based on CiteSpace. Buildings 2024, 14, 1384. [Google Scholar] [CrossRef]
- En, X.; Liu, Y. Visualization analysis of high-speed railway research based on CiteSpace. Transp. Policy 2020, 85, 1–17. [Google Scholar]
- Zhang, R.; Ren, R.; Yuan, B.; Luo, G.; Bi, L. Construction path optimization method of assembly building robot. Comput. Eng. Des. 2021, 42, 3516–3524. [Google Scholar]
- Wang, F.; Li, T.; Liu, J.; Zhao, H. Research on Autonomous Path Planning and Obstacle Avoidance of Building Robot Based on BIM. Comput. Eng. Appl. 2020, 56, 224–230. [Google Scholar]
- Muñoz-Bañón, M.; Velasco-sanchez, E.; Candelas, F. Openstreetmap-based autonomous navigation with lidar naive-valley-path obstacle avoidance. IEEE Trans. Intell. Transp. Syst. 2022, 23, 24428–24438. [Google Scholar] [CrossRef]
- Yang, Z.; Zhuang, Y.; Chen, Y. Path planning of a building robot based on BIM and an improved RRT algorithm. Exp. Technol. Manag. 2024, 41, 31–42. [Google Scholar]
- Gao, H.; Zhang, X.; Wen, J.; Yuan, J.; Fang, Y. Autonomous indoor exploration via polygon map construction and graph-based SLAM using directional endpoint features. IEEE Trans. Autom. Sci. Eng. 2018, 16, 1531–1542. [Google Scholar] [CrossRef]
- Huang, P.; Zeng, L.; Chen, X. Edge robotics: Edge-computing-accelerated multirobot simultaneous localization and map. IEEE Internet Things J. 2022, 9, 14087–14102. [Google Scholar] [CrossRef]
- Liu, P.; Bi, Y.; Shi, J. Semantic-Assisted LIDAR Tightly Coupled SLAM for dynamic environments. IEEE Access 2024, 12, 34042–34053. [Google Scholar] [CrossRef]
- Li, S.; He, R.; Guan, H. A 3D LiDAR-Inertial Tightly-Coupled SLAM for Mobile Robots on Indoor Environment. IEEE Access 2024, 12, 29596–29606. [Google Scholar] [CrossRef]
- Zhou, E.; Liu, X.; Qing, Z. Research and Implementation of Monitoring and Early Warning System of Deep Foundation Pit. Chin. J. Undergr. Space Eng. 2013, 9, 204–210. [Google Scholar]
- Zhang, S.; Huang, S.; Yang, X. Research on real-time gross error detection method based on geo robot. Bull. Surv. Mapp. 2021, 153–155+161. [Google Scholar] [CrossRef]
- Zheng, H.; Fu, K. Design and Implementation of Foundation Pit Deformation Automatic Monitoring Software Based on Android. Geospat. Inf. 2022, 20, 120–123. [Google Scholar]
- Zhang, Z.; Pang, K.; Xu, L.; Zou, Y.; Yang, J.; Wang, C. The bond properties between UHPC and stone under different interface treatment methods. Constr. Build. Mater. 2023, 365, 130092. [Google Scholar] [CrossRef]
- Ji, Y.; Shi, K.; Dong, J. Research on Accuracy Improvement Method of Horizontal Deformation Intelligent Monitoring for Super High-rise Buildings. Constr. Technol. 2023, 52, 20–24+79. [Google Scholar]
- Yuan, F.; Chai, H.; Zhang, X. Exploration of small-batch customization production mode of timber architecture based architectural robot. Build. Struct. 2018, 48, 39–43+55. [Google Scholar]
- Yuan, F.; Chai, H. Digital construction technology system of assembled buildings for mass customization-Taking the innovation of assembled wooden buildings as an example. New Build. 2022, 04, 9–14. [Google Scholar]
- Duan, H.; Zhang, F.; Chen, G. The Practice and Development of Intelligent Construction Driven by Construction Robots. Constr. Econ. 2022, 43, 5–12. [Google Scholar]
- Zhao, P.; Zhang, M.; Zhang, W. Application of BIM parametric design in complex buildings with different shapes. Build. Struct. 2023, 53, 2060–2062. [Google Scholar]
- Gao, Y.; Shu, J.; Yu, K. Research on robotic construction of light weight structures using BIM visual programming. J. Build. Struct. 2022, 43, 296–304. [Google Scholar]
- Wang, P.; Xiao, J.; Xiao, X. Application and Prospect of Digital Technology in Building Construction. J. Tongji Univ. (Nat. Sci.) 2024, 52, 1068–1078. [Google Scholar]
- Li, D.; Jiang, B.; Gu, W. The transformation and talent training mode of architectural engineering technology for intelligent construction. Archit. Sci. 2024, 40, 196. [Google Scholar]
- Zuo, Z.; Huang, Y.; Zang, L. 3D printing technology and feasibility analysis of its application in super high-rise buildings. Build. Struct. 2022, 52, 95–101. [Google Scholar]
- Liu, T. Tsinghua University State Key Laboratory of Hydro science and Engineering. 3D printing of large filled construction projects. J. Tsinghua Univ. (Sci. Technol.) 2022, 62, 1281–1291. [Google Scholar]
- Hong, T.; Gao, X. Improve Path Generation Method of 3D Printing Robot under Q Learning. Comput. Simul. 2023, 40, 417–421. [Google Scholar]
- Zeng, N.; Ma, Z.; Song, L. A porosity detection method for 3D printed concrete interface with self-attention mechanism. Chin. J. Eng. Des. 2024, 1–10. Available online: https://kns.cnki.net/kcms/detail/33.1288.TH.20240527.1349.006.html (accessed on 12 December 2024).
- Huang, L.; Zhu, Z.; Zou, Z. To imitate or not to imitate: Boosting reinforcement learning-based construction robotic control for long-horizon tasks using virtual demonstrations. Autom. Constr. 2023, 146, 104691. [Google Scholar] [CrossRef]
- Zha, A.; Dai, T.; Xu, G. Deep reinforcement learning for real-time assembly planning in robot-based prefabricated construction. IEEE Trans. Autom. Sci. Eng. 2023, 20, 1515–1526. [Google Scholar] [CrossRef]
- Liang, C.J.; Wang, X.; Kamat, V. Human–robot collaboration in construction: Classification and research trends. J. Constr. Eng. Manag. 2021, 147, 03121006. [Google Scholar] [CrossRef]
- Wang, X.; Liang, C.; Menassa, C. Interactive and immersive process-level digital twin for collaborative human–robot construction work. J. Comput. Civ. Eng. 2021, 35, 04021023. [Google Scholar] [CrossRef]
- Yang, X.; Amtsberg, F.; Sedlmair, M. Challenges and potential for human–robot collaboration in timber prefabrication. Autom. Constr. 2024, 160, 105333. [Google Scholar] [CrossRef]
- Liu, Y.; Habibnezhad, M.; Jebelli, H. Brainwave-driven human-robot collaboration in construction. Autom. Constr. 2021, 124, 103556. [Google Scholar] [CrossRef]
- Bakdi, A.; Hentout, A.; Boutami, H. Optimal path planning and execution for mobile robots using genetic algorithm and adaptive fuzzy-logic control. Robot. Auton. Syst. 2017, 89, 95–109. [Google Scholar] [CrossRef]
- De Soto, B.G.; Agusti-juan, G.; Hunhevicz, J. Productivity of digital fabrication in construction: Cost and time analysis of a robotically built wall. Autom. Constr. 2018, 92, 297–311. [Google Scholar] [CrossRef]
- Hartmann, V.; Orthey, A.; Driess, D. Long-horizon multi-robot rearrangement planning for construction assembly. IEEE Trans. Robot. 2022, 39, 239–252. [Google Scholar] [CrossRef]
- Elmakis, O.; Shaked, T.; Degani, A. Vision-based uav-ugv collaboration for autonomous construction site preparation. IEEE Access 2022, 10, 51209–51220. [Google Scholar] [CrossRef]
- Pinto, A.; Moreira, E.; Lima, J. A cable-driven robot for architectural constructions: A visual-guided approach for motion control and path-planning. Auton. Robot. 2017, 41, 1487–1499. [Google Scholar] [CrossRef]
- Kavhani, N.; Zhao, W.; Mccabe, B. Tag-based visual-inertial localization of unmanned aerial vehicles in indoor construction environments using an on-manifold extended Kalman filter. Autom. Constr. 2022, 135, 104112. [Google Scholar]
- Mei, J.; Zuo, T.; Song, D. Highly dynamic visual SLAM dense map construction based on indoor environments. IEEE Access 2024, 12, 38717–38731. [Google Scholar] [CrossRef]
- Liu, C.; Wu, J.; Jiang, X. Automatic assembly of prefabricated components based on vision-guided robot. Autom. Constr. 2024, 162, 105385. [Google Scholar] [CrossRef]
- Feng, R.; Jia, Y.; Wang, T. Research on the system design and target recognition method of the rebar-tying robot. Buildings 2024, 14, 838. [Google Scholar] [CrossRef]
- Zhou, L.; Liu, S.; Yang, J. Comparative study on the driving path of competitiveness of technical standards in artificial intelligence industry at home and abroad. Sci. Technol. Prog. Countermeas. 2024, 1–11. Available online: https://kns.cnki.net/kcms/detail/42.1224.G3.20241017.1046.004.html (accessed on 12 December 2024).
- Zhang, W.; Song, Y.; Zhang, N. Application of intelligent construction in safe construction management of building projects. Eng. Constr. Des. 2023, 13, 263–265. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Institution | Count | |
|---|---|---|
| CNKI Chinese database | School of Architecture and Urban Planning, Tongji University, Shanghai, China | 15 |
| Bright Dream Robotics, Foshan, China | 13 | |
| Guangdong Bogarto Construction Technology Co. Foshan, China | 8 | |
| China Construction Eighth Engineering Bureau Co. Shanghai, China | 6 | |
| School of Electro-mechanical Engineering, Guangdong University of Technology, Guangzhou, China | 5 | |
| School of Geodesy and Geomatics, Wuhan University, Wuhan, China | 5 | |
| School of Mechanical and Aerospace Engineering, Jilin University, Changchun, China | 4 | |
| Wuhan Business University, Wuhan, China | 4 | |
| School of Robots Science and Engineering Northeastern University, Shenyang, China | 4 | |
| Guangdong Nonferrous Engineering Survey and Design Institute, Guangzhou, China | 4 | |
| WOS core database | Chinese Academy of Sciences, Beijing, China | 72 |
| University of Michigan System, Michigan, America | 52 | |
| Swiss Federal Institutes of Technology Domain, Zurich, Switzerland | 38 | |
| Harbin Institute of Technology, Harbin, China | 37 | |
| Zhejiang University, Hangzhou, China | 32 | |
| Centre National de la Recherche Scientfique, Paris, France | 32 | |
| Shanghai Jiao Tong University, Shanghai, China | 28 | |
| Tsinghua University, Beijing, China | 27 | |
| Hong Kong Polytechnic University, Hong Kong, China | 27 | |
| Beijing Institute of Technology, Beijing, China | 24 |
| Author | Institution | Count | |
|---|---|---|---|
| CNKI Chinese database | Yuan, Feng | CAUP Tongji University, Shanghai, China | 15 |
| Duan, Han | Guangdong Bogarto Construction Technology Co. Foshan, China | 6 | |
| Wang, Peng | School of Architecture, Tsinghua University, Beijing, China | 4 | |
| Li, Xiao | School of Electro-mechanical Engineering, GDUT, Guangzhou, China | 4 | |
| Lu, Songyao | Guangdong Nonferrous Engineering Survey and Design Institute, Guangzhou, China | 4 | |
| Chen, Linxin | Guangdong Bogarto Construction Technology Co. | 4 | |
| Chen, Gaohong | Bright Dream Robotics, Foshan, China | 3 | |
| Zhang, Junhua | Kunming Institute of Surveying and Mapping, Kunming, China | 3 | |
| Liu, Jinyue | HBUT School of Mechanical Engineering, Harbin, China | 3 | |
| Lu, Chunting | Installation Engineering Co., Ltd. of CSCEC 7th Division, Zhengzhou, China | 3 | |
| WOS core database | Li, Heng | Hong Kong Polytechnic University, Hong Kong, China | 10 |
| Kamat, Vineet R | University of Michigan, Dept Civil, Ann Arbor, Michigan, USA | 9 | |
| Du, Jing | Department of Civil and Coastal Engineering, University of Florida, Gainesville, Florida, USA | 8 | |
| Zhang, Tao | School of Economics and Management, Tongji University, Shanghai, China | 8 | |
| Menassa, Carol C | Department of Civil and Environmental Engineering, University of Michigan, Ann Arbor, Michigan, USA | 8 | |
| Zhou, Tianyu | Department of Civil and Coastal Engineering, University of Florida, Gainesville, Florida, USA | 8 | |
| Zhu, Qi | Department of Civil and Coastal Engineering, University of Florida, Gainesville, Florida, USA | 6 | |
| Kromoser, Benjamin | University of Natural Resources and Life Sciences, Green Civil Engineering Institute, Vienna, Austria | 6 | |
| Jebelli, Houtan | Department of Civil and Environmental Engineering, University of Illinois at Urbana-Campaign, Urbana and Champaign, Illinois, USA | 6 | |
| Menges, Achim | Institute for Computational Design and Structures ICD, University of Stuttgart, Stuttgart, Germany | 6 |
| Keyword | Count | Centrality | Year |
|---|---|---|---|
| Robot | 64 | 0.44 | 2007 |
| New engineering | 47 | 0.04 | 2019 |
| Deformation monitoring | 32 | 0.2 | 2008 |
| Talent cultivation | 31 | 0.02 | 2013 |
| Intelligent construction | 30 | 0.07 | 2021 |
| Artificial intelligence | 21 | 0.05 | 2019 |
| Teaching reform | 18 | 0.01 | 2010 |
| Curriculum system | 18 | 0.04 | 2019 |
| Practice teaching | 12 | 0.01 | 2013 |
| Integration of industry and education | 12 | 0.01 | 2019 |
| Keyword | Count | Centrality | Year |
|---|---|---|---|
| design | 235 | 0.23 | 2007 |
| construction | 150 | 0.18 | 2007 |
| system | 146 | 0.12 | 2008 |
| robot | 134 | 0.17 | 2007 |
| mobile robot | 82 | 0.09 | 2008 |
| model | 79 | 0.13 | 2008 |
| mobile robots | 78 | 0.12 | 2007 |
| systems | 76 | 0.09 | 2011 |
| algorithm | 75 | 0.11 | 2007 |
| optimization | 67 | 0.06 | 2012 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dong, R.; Chen, C.; Wang, Z. Visualization Analysis of Construction Robots Based on Knowledge Graph. Buildings 2025, 15, 6. https://doi.org/10.3390/buildings15010006
Dong R, Chen C, Wang Z. Visualization Analysis of Construction Robots Based on Knowledge Graph. Buildings. 2025; 15(1):6. https://doi.org/10.3390/buildings15010006
Chicago/Turabian StyleDong, Runrun, Cuixia Chen, and Zihan Wang. 2025. "Visualization Analysis of Construction Robots Based on Knowledge Graph" Buildings 15, no. 1: 6. https://doi.org/10.3390/buildings15010006
APA StyleDong, R., Chen, C., & Wang, Z. (2025). Visualization Analysis of Construction Robots Based on Knowledge Graph. Buildings, 15(1), 6. https://doi.org/10.3390/buildings15010006