
Simulation of Water Flow Path Length (WFPL) and Water Film Depth (WFD) for Wide Expressway Asphalt Pavement


Abstract
1. Introduction
2. Literary Review
3. Methodology
3.1. Modelling of the Pavement
3.2. Selection of Simulation Models
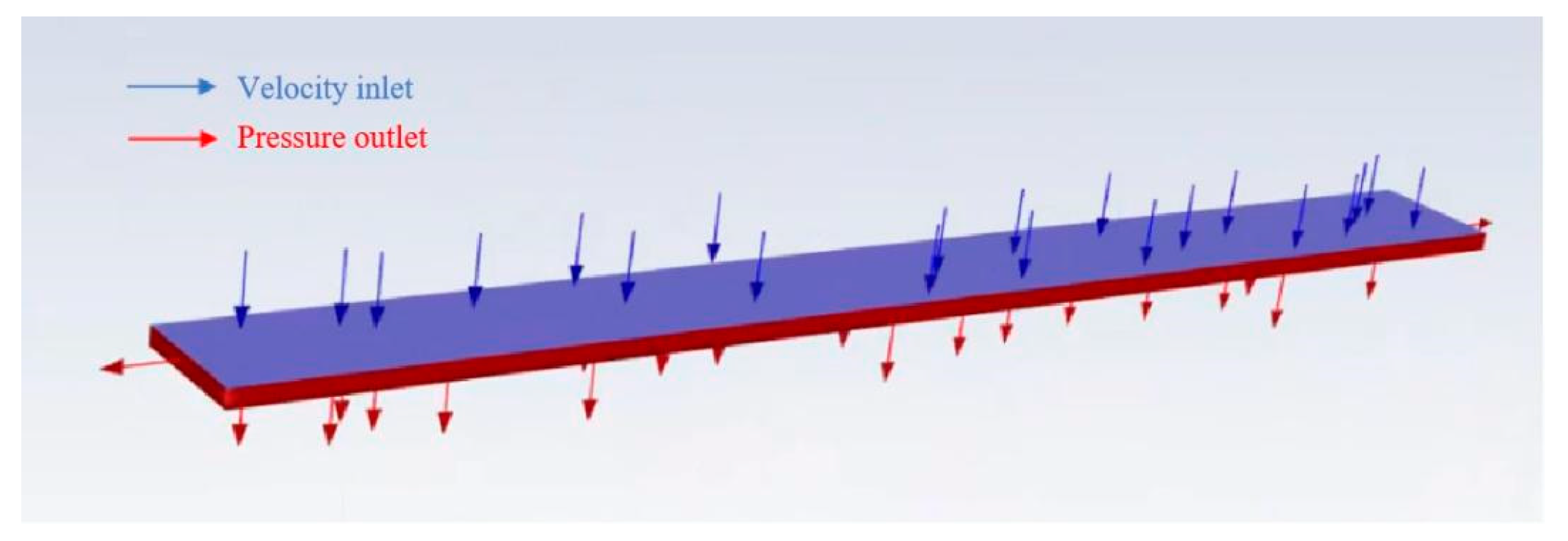
3.2.1. Rainfall Simulation
- The flow input is stable and consistent with the set rainfall intensity;
- The range of simulated rainfall needs to completely cover the surface of the pavement geometry model, and the spatial distribution is uniform and reasonable;
- The flow inputs in the form of raindrops during rainfall should be reproduced in a granular manner as far as possible;
- The duration of rainfall can be controlled to simulate rainfall within a certain time interval.
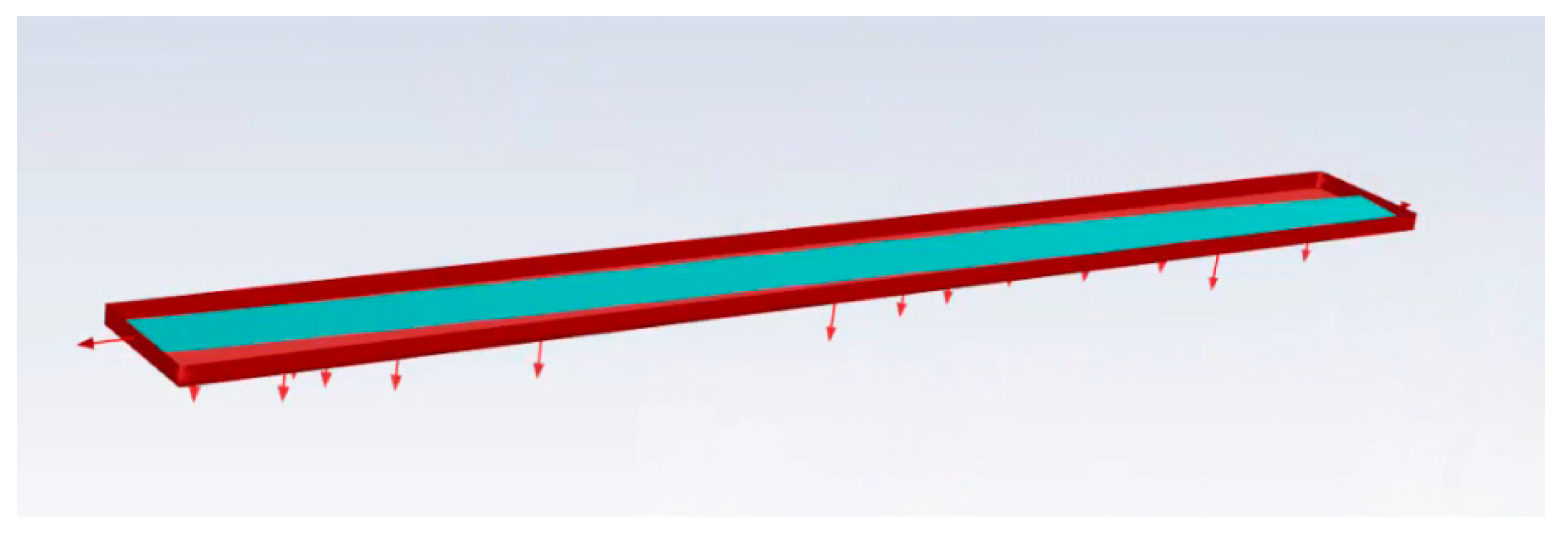
3.2.2. Runoff Simulation
- Can be computed with the DPM model to collect DPM fluid particles and form a water film on the surface of the pavement geometry model;
- Able to simulate the flow of runoff on the pavement surface, tracking the water film in the selected area under the action of gravity, surface tension, etc., to form runoff and flow out of the pavement width dissipation;
- Can visualize the depth distribution of water on the pavement surface at different locations in the form of WFD.
3.3. Rainfall Condition Simulation
3.4. WFD Prediction Model
- (1)
- The model proposed by Luo et al. [16]:
- (2)
- The model proposed by Ji et al. [30]:
- (3)
- The Gallaway model [31]:
- (4)
- The Wambold model [32]:
3.5. Linear Combination Conditions
3.5.1. Straight-Line Section
3.5.2. Circular-Curve Section
4. Results and Discussion
4.1. Simulation Results and Discussion of Straight-Line Sections
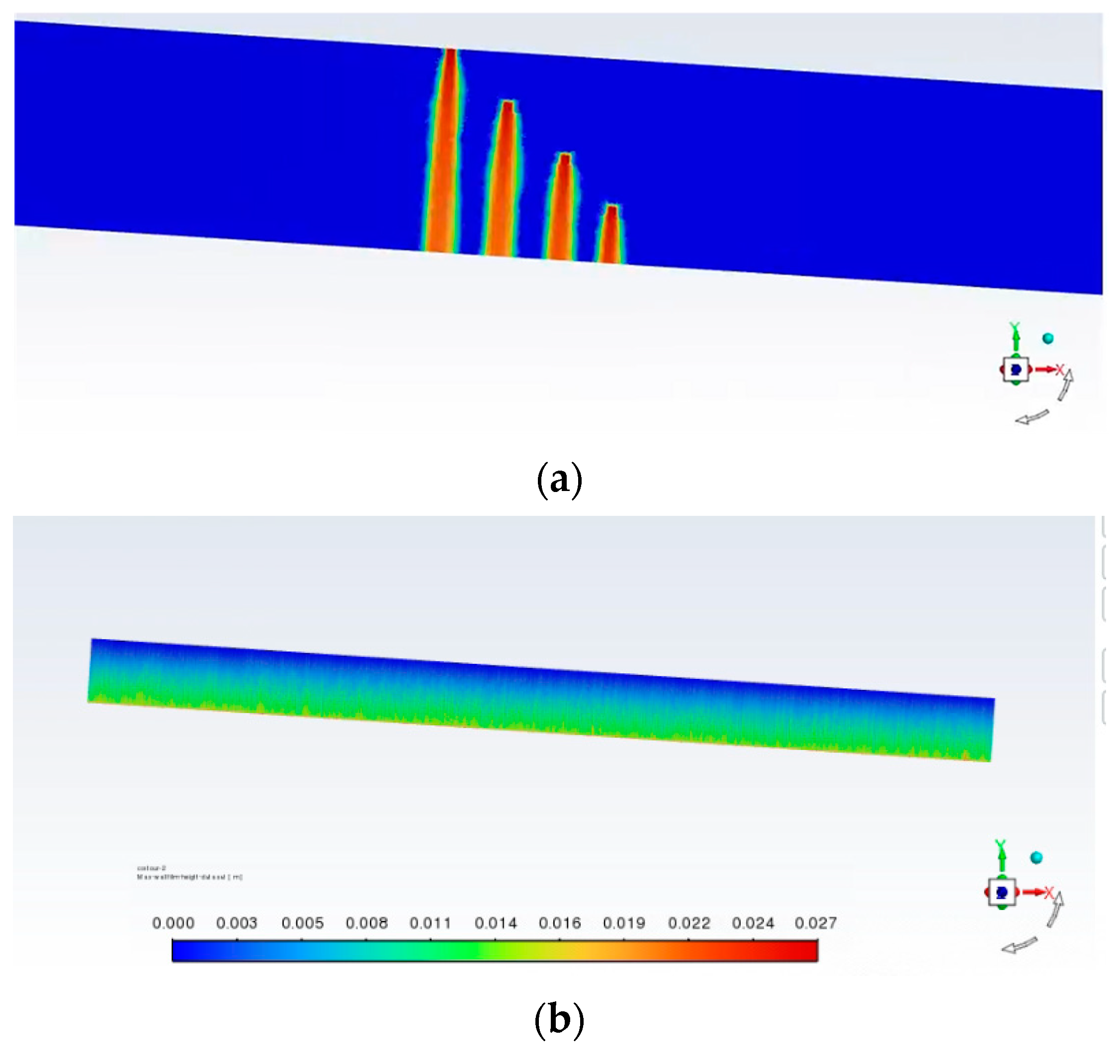
4.1.1. Distribution of the WFPL and WFD
4.1.2. Maximum Water Film Path Length (WFPLmax)
4.1.3. Maximum Water Flow Depth (WFDmax)
4.2. Simulation Results and Discussion of Circular-Curve Sections
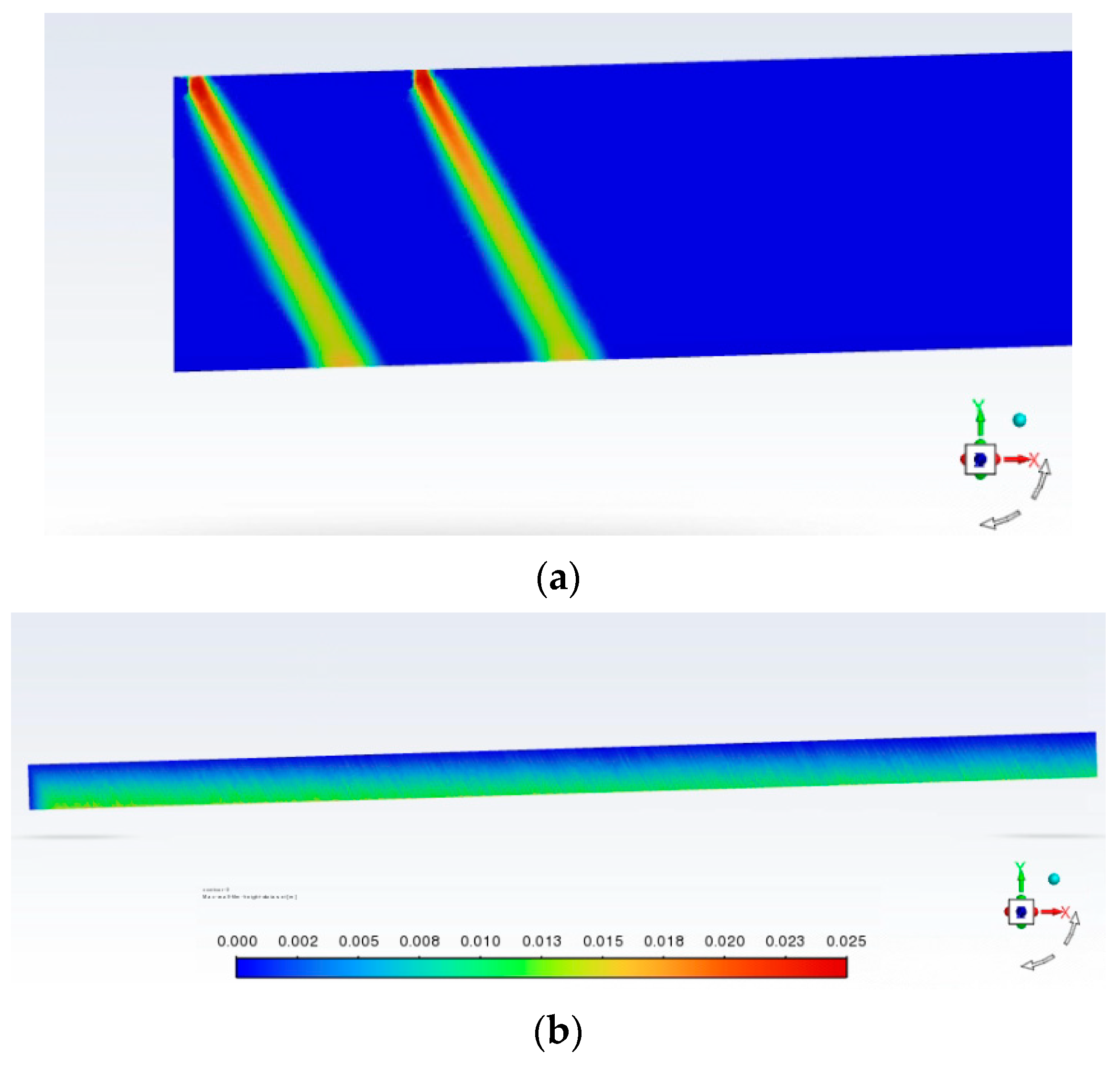
4.2.1. Distribution of the WFPL and WFD
4.2.2. Maximum Water Film Path Length (WFPLmax)
4.2.3. Maximum Water Flow Depth (WFDmax)
5. Conclusions
- According to the absolute values of Beta, the influence of each linear index on the WFPLmax and WFDmax for both straight-line and circular-curve sections is different: LS has the greatest influence on the WFPLmax, followed by the PW; while the PW has the greatest influence on the WFDmax, and LS has the least effect.
- WFDmax is positively correlated with the WFPLmax, and the increase in the WFPL makes the retained time of water flow in the pavement longer, increasing the WFD. The WFD increases gradually along the direction of the WFPLmax and reaches the maximum value on the inside of the road curb.
- When the design value of LS is between 1.1% and 4%, the WFDmax can be effectively reduced by lowering the LS; and when the LS is less than 1.1%, it is not recommended to prioritize the adjustment of the LS to reduce the WFDmax.
- In the case of large design values of the LS, it can be considered to effectively reduce the WFPLmax by increasing the arch TS from 2% to 2.5% for straight-line and circular-curve sections, and the wider PW, the better the improvement effect.
- While the pavement width is widened, adjusting TS from 2% to 2.5% can effectively offset the increasing effect of the PW on the WFDmax.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Hermange, C.; Oger, G.; Le Chenadec, Y.; de Leffe, M.; Le Touzé, D. In-depth analysis of hydroplaning phenomenon accounting for tire wear on smooth ground. J. Fluids Struct. 2022, 111, 103555. [Google Scholar] [CrossRef]
- Spitzhüttl, F.; Goizet, F.; Unger, T.; Biesse, F. The real impact of full hydroplaning on driving safety. Accid. Anal. Prev. 2020, 138, 105458. [Google Scholar] [CrossRef] [PubMed]
- Huang, X.; Liu, X.; Cao, Q.; Yan, T.; Zhu, S.; Zhou, X. Numerical Simulation of Tire Partial Hydroplaning on Flooded Pavement. J. Hunan Univ. (Nat. Sci.) 2018, 45, 113–121. [Google Scholar]
- Xiao, K.; Hui, B.; Qu, X.; Wang, H.; Diab, A.; Cao, M. Asphalt pavement water film thickness detection and prediction model: A review. J. Traffic Transp. Eng. (Engl. Ed.) 2023, 10, 349–367. [Google Scholar] [CrossRef]
- Luo, W.; Li, L. Development of a new analytical water film depth (WFD) prediction model for asphalt pavement drainage evaluation. Constr. Build. Mater. 2019, 218, 530–542. [Google Scholar] [CrossRef]
- Ma, Y.; Geng, Y.; Chen, X.; Lu, Y. Prediction for asphalt pavement water film thickness based on artificial neural network. J. Southeast Univ. (Engl. Ed.) 2017, 33, 490–495. [Google Scholar]
- Lubnow, M.; Jeffries, J.B.; Dreier, T.; Schulz, C. Water film thickness imaging based on time-multiplexed near-infrared absorption. Opt. Express 2018, 26, 20902–20912. [Google Scholar] [CrossRef]
- Ling, J.; Yang, F.; Zhang, J.; Li, P.; Uddin, M.D.I.; Cao, T. Water-film depth assessment for pavements of roads and airport runways: A review. Constr. Build. Mater. 2023, 392, 132054. [Google Scholar] [CrossRef]
- Luo, W.; Li, L.; Wang, K.C.; Wei, C. Surface drainage evaluation of asphalt pavement using a new analytical water film depth model. Road Mater. Pavement Des. 2020, 21, 1985–2004. [Google Scholar] [CrossRef]
- Qi, Y. Effect of Road Alignment Combination on Pavement Runoff Characterisrics. Master’s Thesis, Southeast University, Nanjing, China, 2019. [Google Scholar]
- Akan, A.O. Drainage of Pavements Under Nonuniform Rainfall. J. Transp. Eng. 1986, 112, 172–183. [Google Scholar] [CrossRef]
- Jeong, J.; Charbeneau, R.J. Diffusion Wave Model for Simulating Storm-Water Runoff on Highway Pavement Surfaces at Superelevation Transition. J. Hydraul. Eng. 2010, 136, 770–778. [Google Scholar] [CrossRef]
- Charbeneau, R.J.; Jeong, J.; Barrett, M.E. Highway Drainage at Superelevation Transitions; The University of Texas at Austin: Austin, TX, USA, 2008. [Google Scholar]
- Liu, X.; Chen, Y.; Shen, C. Coupled Two-Dimensional Surface Flow and Three-Dimensional Subsurface Flow Modeling for Drainage of Permeable Road Pavement. J. Hydrol. Eng. 2016, 21, 04016051. [Google Scholar] [CrossRef]
- Softić, E.; Radičević, V.; Subotić, M.; Stević, Ž.; Talić, Z.; Pamučar, D. Sustainability of the Optimum Pavement Model of Reclaimed Asphalt from a Used Pavement Structure. Sustainability 2020, 12, 1912. [Google Scholar] [CrossRef]
- Luo, J.; Liu, J.; Wang, Y. Validation Test on Pavement Water Film Depth Prediction Model. China J. Highw. Transp. 2015, 28, 57–63. [Google Scholar]
- Zhang, L. The Water Sections Diagnosis and Control Techniques. Master’s Thesis, Chongqing Jiaotong University, Chongqing, China, 2013. [Google Scholar]
- Huebner, R.S.; Anderson, D.A.; Warner, J.C.; Reed, J.R. PAVDRN: Computer model for predicting water film thickness and potential for hydroplaning on new and reconditioned pavements. Transp. Res. Rec. 1997, 1599, 128–131. [Google Scholar] [CrossRef]
- Guo, S. Analysis on Pavement Runoff Characteristics of Super Multilane Expressway. North. Commun. 2021, 8, 64–68. [Google Scholar]
- Ji, T.; An, J.; He, S.; Li, C. Prediction of road Surface rainfall depth based on Artificial neural Network. Trans. Nanjing Univ. Aeronaut. Astronaut. 2006, 23, 115–119. [Google Scholar]
- Liu, Y.; Miao, H. Research on Performance of New Pavement Drainage System Under Rainfall Infiltration. China J. Highw. Transp. 2017, 30, 1–9. [Google Scholar]
- Escarameia, M.; Gasowski, Y.; May, R.W.P.; Bergamini, L. Estimation of runoff depths on paved areas. Urban Water J. 2006, 3, 185–197. [Google Scholar] [CrossRef]
- Pan, C.; Yu, P.; Lu, H. Numerical simulation of wetting and drying for shallow flows by Riemann solution on dry bed. J. Hydrodyn. 2009, 24, 305–312. [Google Scholar]
- Cea, L.; Garrido, M.; Puertas, J. Experimental validation of two-dimensional depth-averaged models for forecasting rainfall-runoff from precipitation data in urban areas. J. Hydrol. 2010, 382, 88–102. [Google Scholar] [CrossRef]
- Staufer, P.; Siekmann, M.; Loos, S.; Pinnekamp, J. Numerical Modeling of Water Levels on Pavements under Extreme Rainfall. J. Transp. Eng. 2012, 138, 732–740. [Google Scholar] [CrossRef]
- Li, H.; Kayhanian, M.; Harvey, J.T. Comparative field permeability measurement of permeable pavements using ASTM C1701 and NCAT permeameter methods. J. Environ. Manag. 2013, 118, 144–152. [Google Scholar] [CrossRef] [PubMed]
- Aureli, F.; Maranzoni, A.; Mignosa, P.; Ziveri, C. A weighted surface-depth gradient method for the numerical integration of the 2D shallow water equations with topography. Adv. Water Resour. 2008, 31, 962–974. [Google Scholar] [CrossRef]
- Costabile, P.; Costanzo, C.; Macchione, F. Performances and limitations of the diffusive approximation of the 2-d shallow water equations for flood simulation in urban and rural areas. Appl. Numer. Math. 2016, 116, 141–156. [Google Scholar] [CrossRef]
- Liu, S.-H.; Tai, W.; Fan, M.; Luo, Q.-S. Numerical simulation of atomization rainfall and the generated flow on a slope. J. Hydrodyn. 2012, 24, 273–279. [Google Scholar] [CrossRef]
- Ji, T.; Huang, X.; Liu, Q.; Tang, G. Prediction model of rain water depth on road surface. J. Traffic Transp. Eng. 2004, 4, 1–3. [Google Scholar]
- Gallaway, B.M.; Schiller, R.E.; Rose, J.G. The Effects of Rainfall Intensity, Pavement Cross Slope, Surface Texture, and Drainage Length on Pavement Water Depths; Texas A&M University: College Station, TX, USA, 1971. [Google Scholar]
- Wambold, J.C.; Henry, J.J.; Hegmon, R.R. Evaluation of pavement surface texture significance and measurement techniques. Wear 1982, 83, 351–368. [Google Scholar] [CrossRef]
- JTG D20-2017; Design Specification for Highway Alignment. People’s Communications Press: Beijing, China, 2017.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Rainfall Intensity (mm/h) | Mean Diameter of a Raindrop (mm) | Hourly Rainfall Intensity (mm/h) | Mean Diameter of a Raindrop (mm) |
|---|---|---|---|
| 0.25 | 0.75–1.00 | 25.4 | 2.00–2.25 |
| 1.27 | 1.00–1.25 | 50.8 | 2.25–2.75 |
| 2.54 | 1.25–1.50 | 101.6 | 2.75–3.00 |
| 12.70 | 1.75–2.00 | 152.4 | 3.00–3.25 |
| Number of Lanes per Side | Section Length (m) | LS (%) | TS (%) |
|---|---|---|---|
| 4 | 300 | −0.3 | 2 |
| −0.5 | |||
| 5 | −1.0 | ||
| −2.0 | 2.5 | ||
| 6 | 3.0 | ||
| −4.0 |
| Number of Lanes per Side | Section Length (m) | Radius of the Circular Curve (m) | LS (%) | TS (%) |
|---|---|---|---|---|
| 4 | 300 | 4500 | −0.3% | 2.0% |
| −0.5% | ||||
| 5 | −1.0% | |||
| −2.0% | 2.5% | |||
| 6 | −3.0% | |||
| −4.0% |
| Number of Lanes in Both Sides | LS (%) | 0.3 | 0.5 | 1.0 | 2.0 | 3.0 | 4.0 | |
|---|---|---|---|---|---|---|---|---|
| TS (%) | ||||||||
| 8 | 2.0 | 15.93 | 16.23 | 17.61 | 22.27 | 28.39 | 35.22 | |
| 2.5 | 15.86 | 16.06 | 16.96 | 20.17 | 24.60 | 29.72 | ||
| 10 | 2.0 | 19.72 | 20.10 | 21.80 | 27.58 | 35.15 | 43.60 | |
| 2.5 | 19.64 | 19.89 | 21.00 | 24.97 | 30.46 | 36.79 | ||
| 12 | 2.0 | 23.51 | 23.97 | 25.99 | 32.88 | 41.91 | 51.99 | |
| 2.5 | 23.42 | 23.71 | 25.04 | 29.77 | 36.32 | 43.87 | ||
| Number of Lanes on Both Sides | 8 | 10 | 12 | |
|---|---|---|---|---|
| LS (%) | ||||
| 0.3 | 0.07 | 0.08 | 0.09 | |
| 4 | 5.50 | 6.81 | 8.12 | |
| Multiple | 78 | 85 | 90 | |
| Model | Unstandardized Coefficient | Standard Coefficient | t | Significance | Covariance Statistic | ||
|---|---|---|---|---|---|---|---|
| B | Standard Error | Beta | Tolerance | VIF | |||
| Constant | 2.26 | 1.28 | / | 1.77 | 0.078 | / | / |
| LS | −5.80 | 0.11 | −0.78 | −54.48 | 0.00 | 1.00 | 1.00 |
| TS | −6.23 | 0.46 | −0.20 | −13.56 | 0.00 | 1.00 | 1.00 |
| PW | 1.46 | 0.037 | 0.56 | 38.94 | 0.00 | 1.00 | 1.00 |
| Number of Lanes on Both Sides | LS (%) | 0.3 | 0.5 | 1.0 | 2.0 | 3.0 | 4.0 | |
|---|---|---|---|---|---|---|---|---|
| TS (%) | ||||||||
| 8 | 2.0 | 3.20 | 3.21 | 3.23 | 3.29 | 3.36 | 3.42 | |
| 2.5 | 3.01 | 3.01 | 3.03 | 3.07 | 3.12 | 3.17 | ||
| 10 | 2.0 | 3.46 | 3.46 | 3.49 | 3.56 | 3.63 | 3.70 | |
| 2.5 | 3.25 | 3.25 | 3.27 | 3.32 | 3.37 | 3.43 | ||
| 12 | 2.0 | 3.69 | 3.69 | 3.72 | 3.79 | 3.87 | 3.94 | |
| 2.5 | 3.46 | 3.47 | 3.48 | 3.53 | 3.59 | 3.65 | ||
| Number of Lanes on Both Sides | LS (%) | The First Lane | The Second Lane | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| TS (%) | 0.3 | 0.5 | 1.0 | 2.0 | 3.0 | 4.0 | 0.3 | 0.5 | 1.0 | 2.0 | 3.0 | 4.0 | ||
| 8 | 2.0 | 1.67 | 1.68 | 1.69 | 1.73 | 1.76 | 1.80 | 2.31 | 2.31 | 2.33 | 2.38 | 2.42 | 2.47 | |
| 2.5 | 1.57 | 1.58 | 1.59 | 1.60 | 1.64 | 1.66 | 2.16 | 2.17 | 2.19 | 2.22 | 2.25 | 2.28 | ||
| 10 | 2.0 | 1.68 | 1.68 | 1.68 | 1.73 | 1.75 | 1.80 | 2.32 | 2.32 | 2.33 | 2.38 | 2.43 | 2.47 | |
| 2.5 | 1.58 | 1.59 | 1.59 | 1.61 | 1.65 | 1.67 | 2.17 | 2.18 | 2.19 | 2.22 | 2.25 | 2.29 | ||
| 12 | 2.0 | 1.67 | 1.68 | 1.69 | 1.73 | 1.76 | 1.81 | 2.31 | 2.32 | 2.33 | 2.39 | 2.44 | 2.47 | |
| 2.5 | 1.58 | 1.59 | 1.59 | 1.61 | 1.65 | 1.68 | 2.17 | 2.19 | 2.19 | 2.22 | 2.26 | 2.29 | ||
| Model | Unstandardized Coefficient | Standard Coefficient | t | Significance | Covariance Statistic | ||
|---|---|---|---|---|---|---|---|
| B | Standard Error | Beta | Tolerance | VIF | |||
| Constant | 3.19 | 0.011 | 284.30 | 0.00 | |||
| LS | −0.06 | 0.001 | −0.27 | −63.60 | 0.00 | 1.00 | 1.00 |
| TS | −0.48 | 0.004 | −0.50 | −119.31 | 0.00 | 1.00 | 1.00 |
| PW | 0.06 | 0.000 | 0.82 | 194.94 | 0.00 | 1.00 | 1.00 |
| Number of Lanes on Both Sides | LS (%) | 0.3 | 0.5 | 1.0 | 2.0 | 3.0 | 4.0 | |
|---|---|---|---|---|---|---|---|---|
| TS (%) | ||||||||
| 8 | 2.0 | 18.96 | 19.33 | 20.96 | 26.52 | 33.80 | 41.93 | |
| 2.5 | 18.88 | 19.12 | 20.19 | 24.01 | 29.29 | 35.38 | ||
| 10 | 2.0 | 22.75 | 23.19 | 25.16 | 31.82 | 40.56 | 50.31 | |
| 2.5 | 22.66 | 22.95 | 24.23 | 28.81 | 35.15 | 42.45 | ||
| 12 | 2.0 | 26.54 | 27.06 | 29.35 | 37.12 | 47.32 | 58.70 | |
| 2.5 | 26.44 | 26.77 | 28.27 | 33.62 | 41.00 | 49.53 | ||
| Number of Lanes on Both Sides | 8 | 10 | 12 | |
|---|---|---|---|---|
| LS (%) | ||||
| 0.3 | 0.08 | 0.09 | 0.10 | |
| 4 | 6.55 | 7.86 | 9.17 | |
| Multiple | 82 | 87 | 92 | |
| Model | Unstandardized Coefficient | Standard Coefficient | t | Significance | Covariance Statistic | ||
|---|---|---|---|---|---|---|---|
| B | Standard Error | Beta | Tolerance | VIF | |||
| Constant | 7.37 | 1.47 | / | 5.01 | 0.00 | / | / |
| LS | 6.46 | 0.12 | 0.82 | 55.3 | 0.00 | 1.00 | 1.00 |
| TS | −6.90 | 0.53 | −0.19 | −13.02 | 0.00 | 1.00 | 1.00 |
| PW | 1.43 | 0.04 | 0.49 | 33.03 | 0.00 | 1.00 | 1.00 |
| Number of Lanes on Both Sides | LS (%) | 0.3 | 0.5 | 1.0 | 2.0 | 3.0 | 4.0 | |
|---|---|---|---|---|---|---|---|---|
| TS (%) | ||||||||
| 8 | 2.0 | 3.41 | 3.42 | 3.44 | 3.51 | 3.58 | 3.65 | |
| 2.5 | 3.21 | 3.21 | 3.22 | 3.27 | 3.33 | 3.38 | ||
| 10 | 2.0 | 3.64 | 3.65 | 3.67 | 3.75 | 3.82 | 3.89 | |
| 2.5 | 3.42 | 3.43 | 3.44 | 3.49 | 3.55 | 3.61 | ||
| 12 | 2.0 | 3.85 | 3.86 | 3.88 | 3.96 | 4.04 | 4.12 | |
| 2.5 | 3.62 | 3.62 | 3.64 | 3.69 | 3.75 | 3.81 | ||
| Number of Lanes on Both Sides | LS (%) | The First Lane | The Second Lane | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| TS (%) | 0.3 | 0.5 | 1.0 | 2.0 | 3.0 | 4.0 | 0.3 | 0.5 | 1.0 | 2.0 | 3.0 | 4.0 | ||
| 8 | 2.0 | 3.23 | 3.24 | 3.26 | 3.32 | 3.39 | 3.45 | 3.23 | 3.24 | 3.26 | 3.32 | 3.39 | 3.45 | |
| 2.5 | 3.04 | 3.04 | 3.05 | 3.10 | 3.15 | 3.20 | 3.04 | 3.04 | 3.05 | 3.10 | 3.15 | 3.20 | ||
| 10 | 2.0 | 3.48 | 3.49 | 3.51 | 3.58 | 3.66 | 3.72 | 3.48 | 3.49 | 3.51 | 3.58 | 3.66 | 3.72 | |
| 2.5 | 3.27 | 3.28 | 3.29 | 3.34 | 3.40 | 3.45 | 3.27 | 3.28 | 3.29 | 3.34 | 3.40 | 3.45 | ||
| 12 | 2.0 | 3.71 | 3.71 | 3.74 | 3.81 | 3.89 | 3.96 | 3.71 | 3.71 | 3.74 | 3.81 | 3.89 | 3.96 | |
| 2.5 | 3.48 | 3.49 | 3.50 | 3.56 | 3.61 | 3.67 | 3.48 | 3.49 | 3.50 | 3.56 | 3.61 | 3.67 | ||
| Model | Unstandardized Coefficient | Standard Coefficient | t | Significance | Covariance Statistic | ||
|---|---|---|---|---|---|---|---|
| B | Standard Error | Beta | Tolerance | VIF | |||
| Constant | 3.54 | 0.01 | / | 312.76 | 0.00 | / | / |
| LS | 0.06 | 0.00 | 0.30 | 68.03 | 0.00 | 1.00 | 1.00 |
| TS | −0.51 | 0.00 | −0.55 | −123.73 | 0.00 | 1.00 | 1.00 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cheng, Z.; Liang, Z.; Li, X.; Ren, X.; Hu, T.; Yu, H. Simulation of Water Flow Path Length (WFPL) and Water Film Depth (WFD) for Wide Expressway Asphalt Pavement. Buildings 2024, 14, 254. https://doi.org/10.3390/buildings14010254
Cheng Z, Liang Z, Li X, Ren X, Hu T, Yu H. Simulation of Water Flow Path Length (WFPL) and Water Film Depth (WFD) for Wide Expressway Asphalt Pavement. Buildings. 2024; 14(1):254. https://doi.org/10.3390/buildings14010254
Chicago/Turabian StyleCheng, Zhenggang, Zhiyong Liang, Xuhua Li, Xiaowei Ren, Tao Hu, and Huayang Yu. 2024. "Simulation of Water Flow Path Length (WFPL) and Water Film Depth (WFD) for Wide Expressway Asphalt Pavement" Buildings 14, no. 1: 254. https://doi.org/10.3390/buildings14010254
APA StyleCheng, Z., Liang, Z., Li, X., Ren, X., Hu, T., & Yu, H. (2024). Simulation of Water Flow Path Length (WFPL) and Water Film Depth (WFD) for Wide Expressway Asphalt Pavement. Buildings, 14(1), 254. https://doi.org/10.3390/buildings14010254