

_Mei.png)
Estimation of Soil–Structure Model Parameters for the Millikan Library Building Using a Sequential Bayesian Finite Element Model Updating Technique

 ,
,  , ,
, , 

Abstract
1. Introduction
2. Data Assimilation through FE Model Updating in the Time Domain
2.1. Bayesian FE Model Updating in Time Domain for Joint System and Input Identification
2.2. Sequential Finite Element Model Updating Using Model Linearization
2.3. Correction for Constraints
2.4. Adaptive Scaling of the Unknown Model Parameters
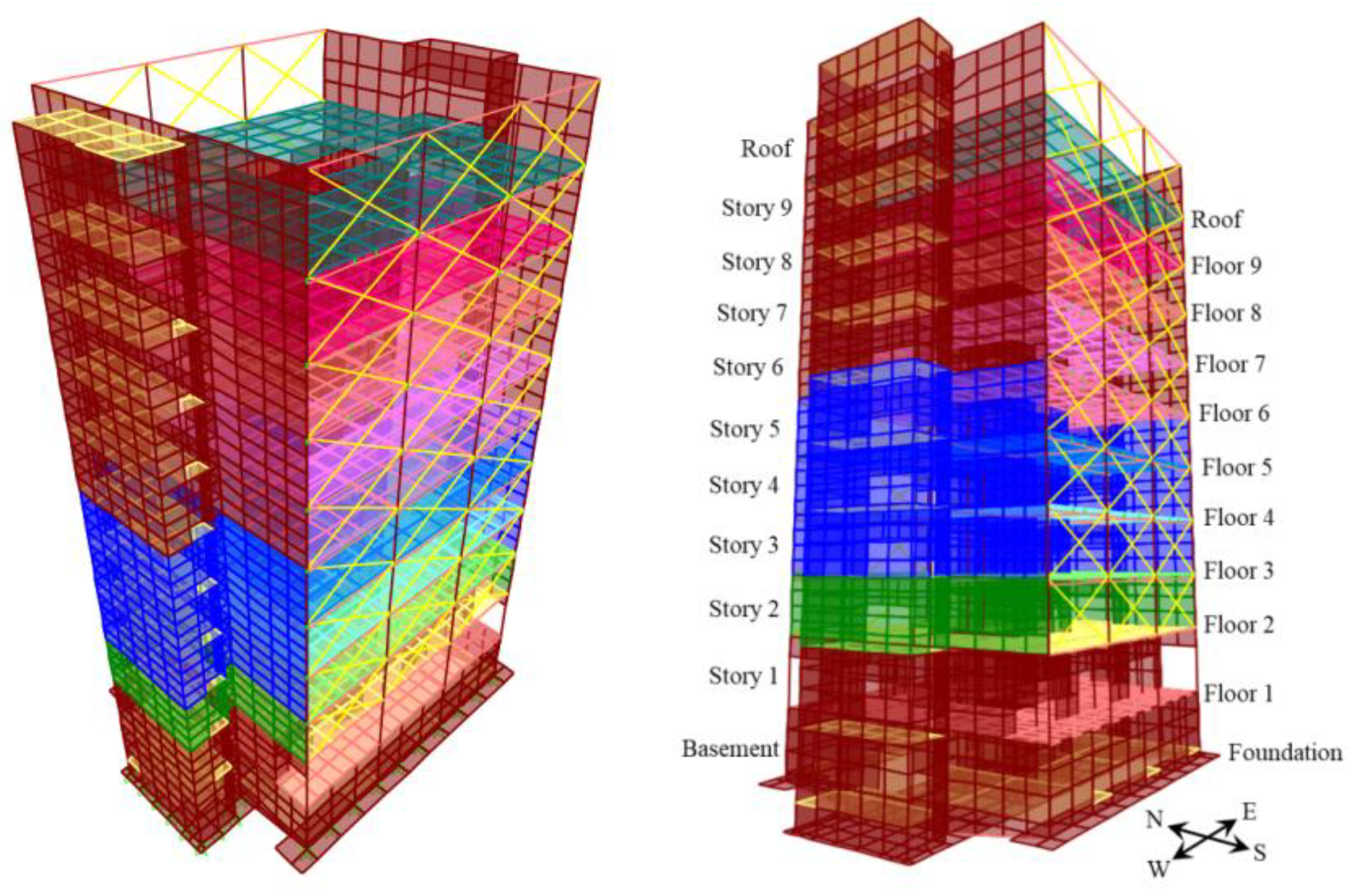
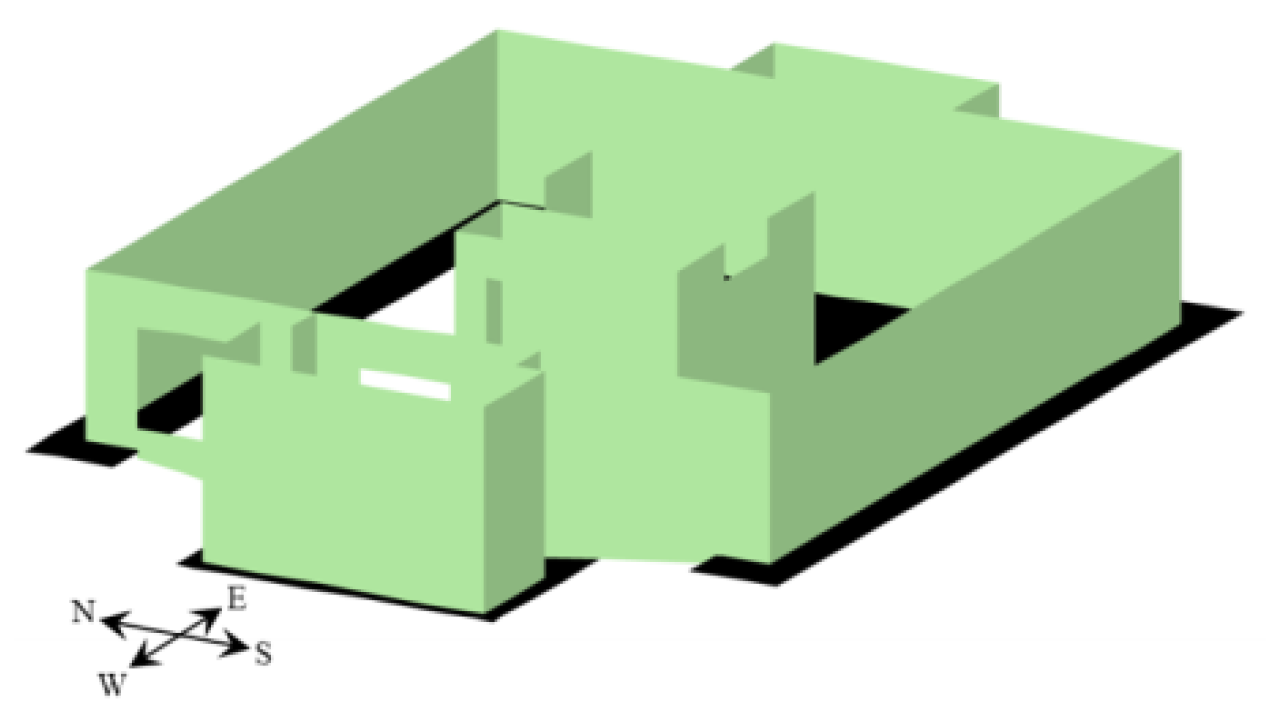
3. The Millikan Library Building
FE Model Development
4. A Two-Step System Identification Approach
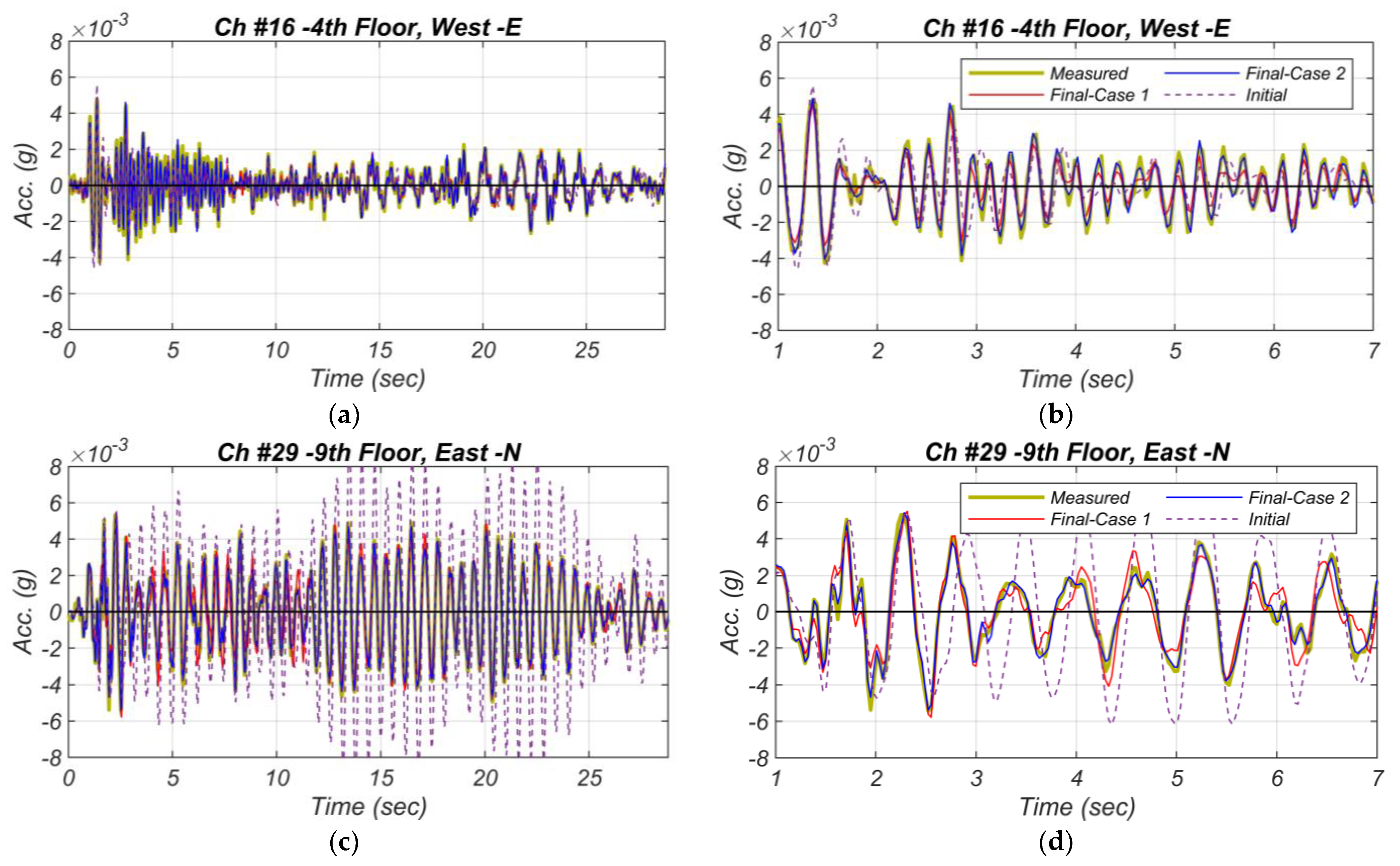
5. Step 1 System Identification: FE Model Updating of the Structural System with Partially Unknown Inputs
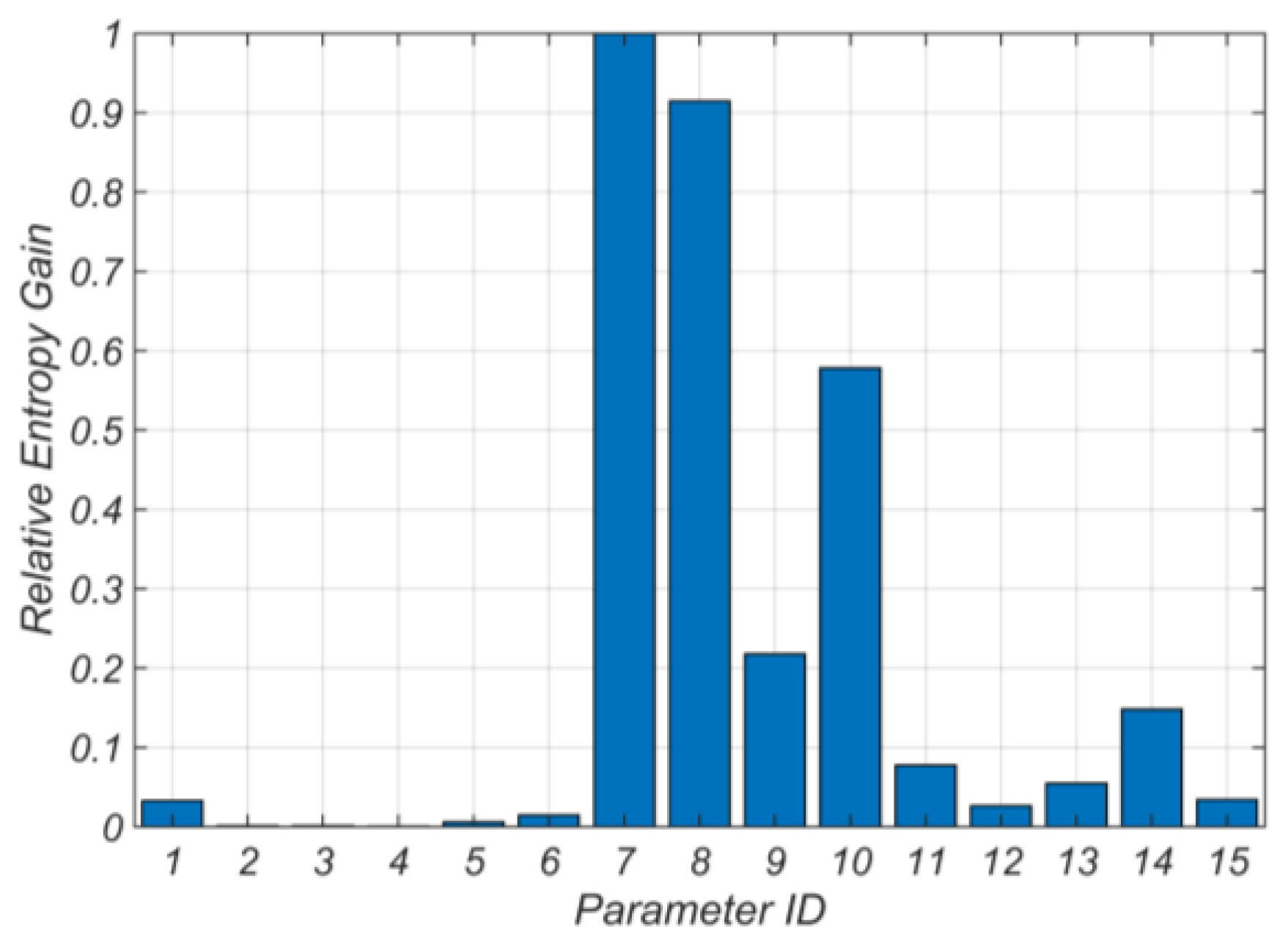
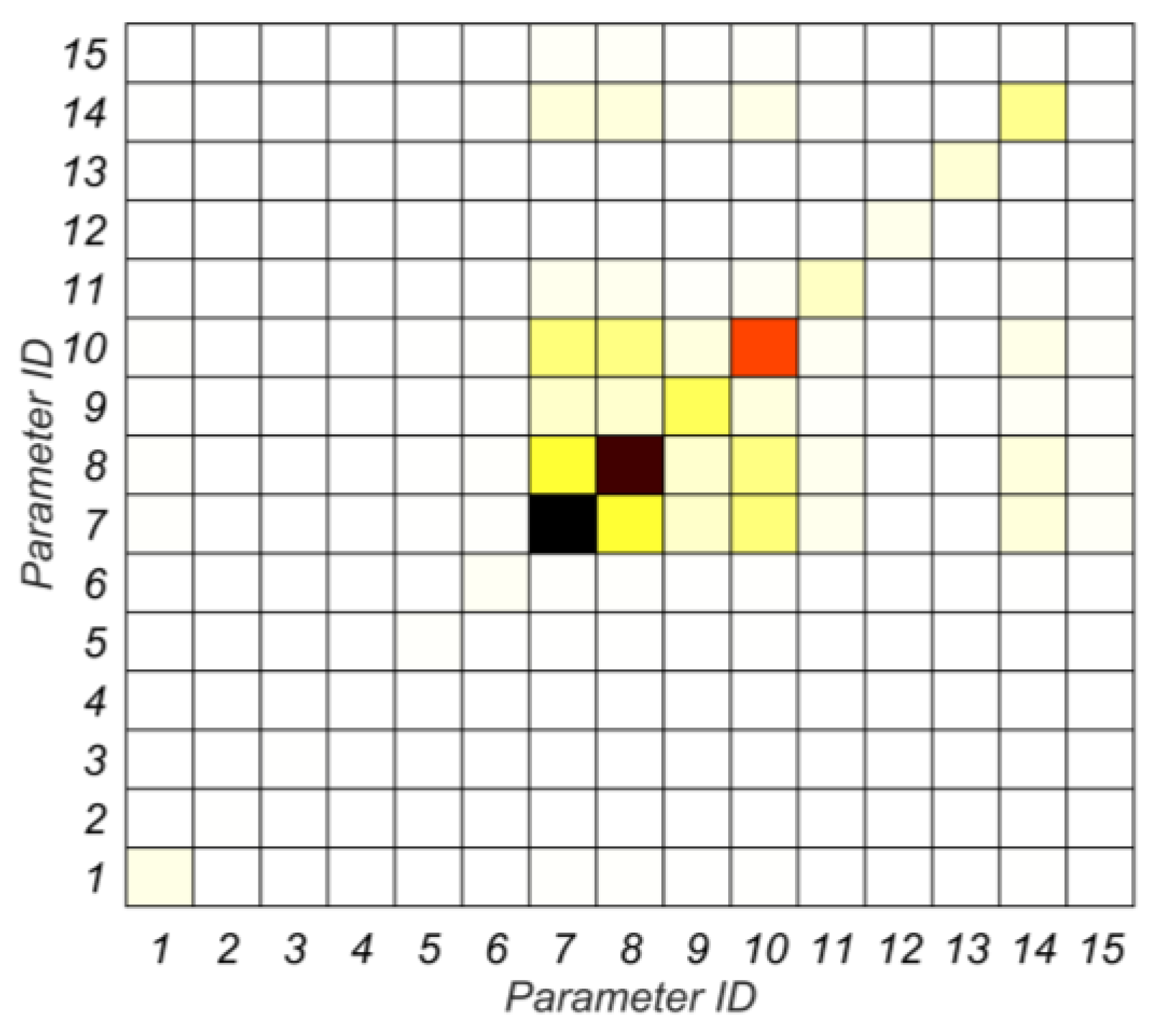
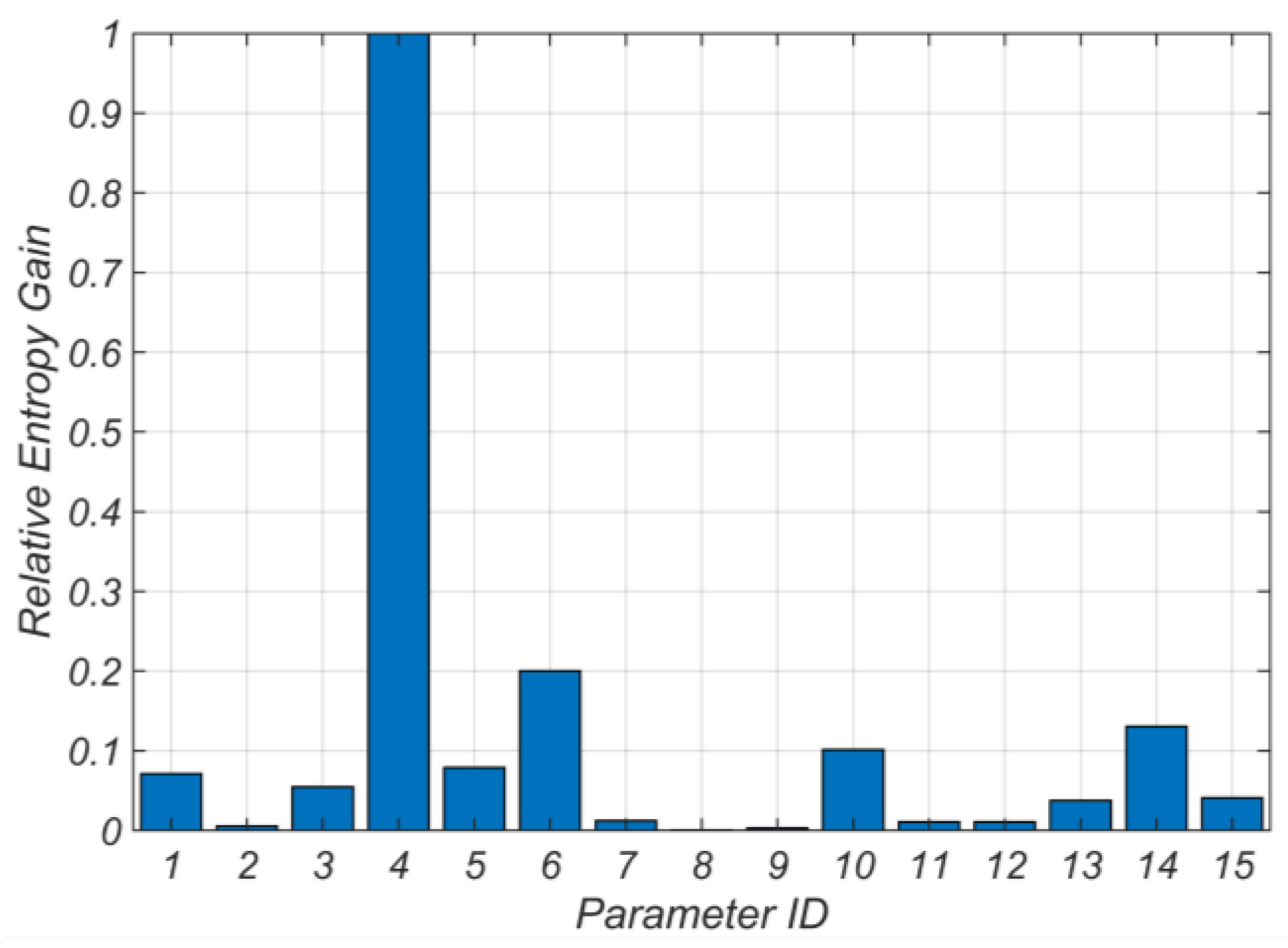
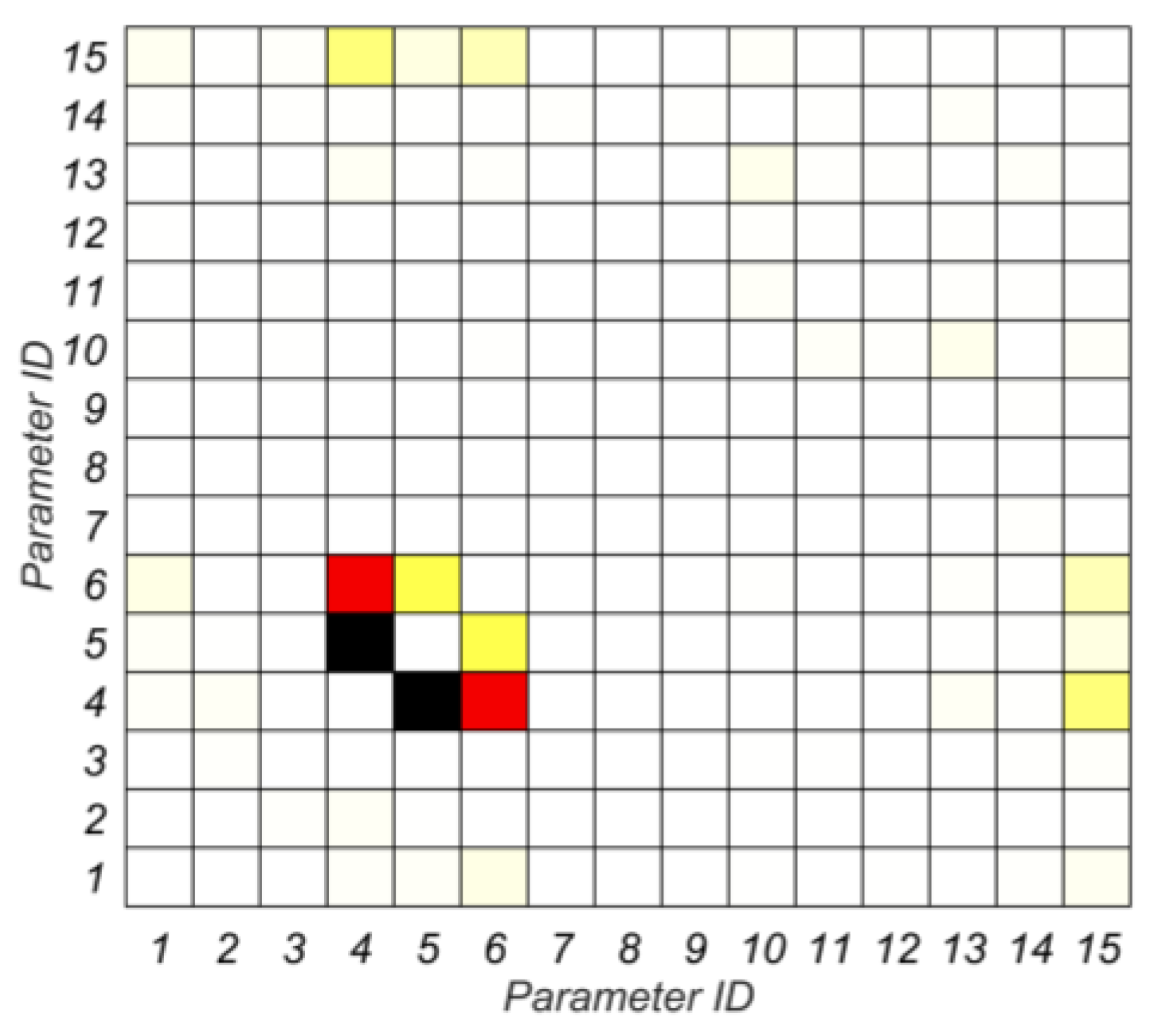
5.1. Model Identifiability and Parameter Selection
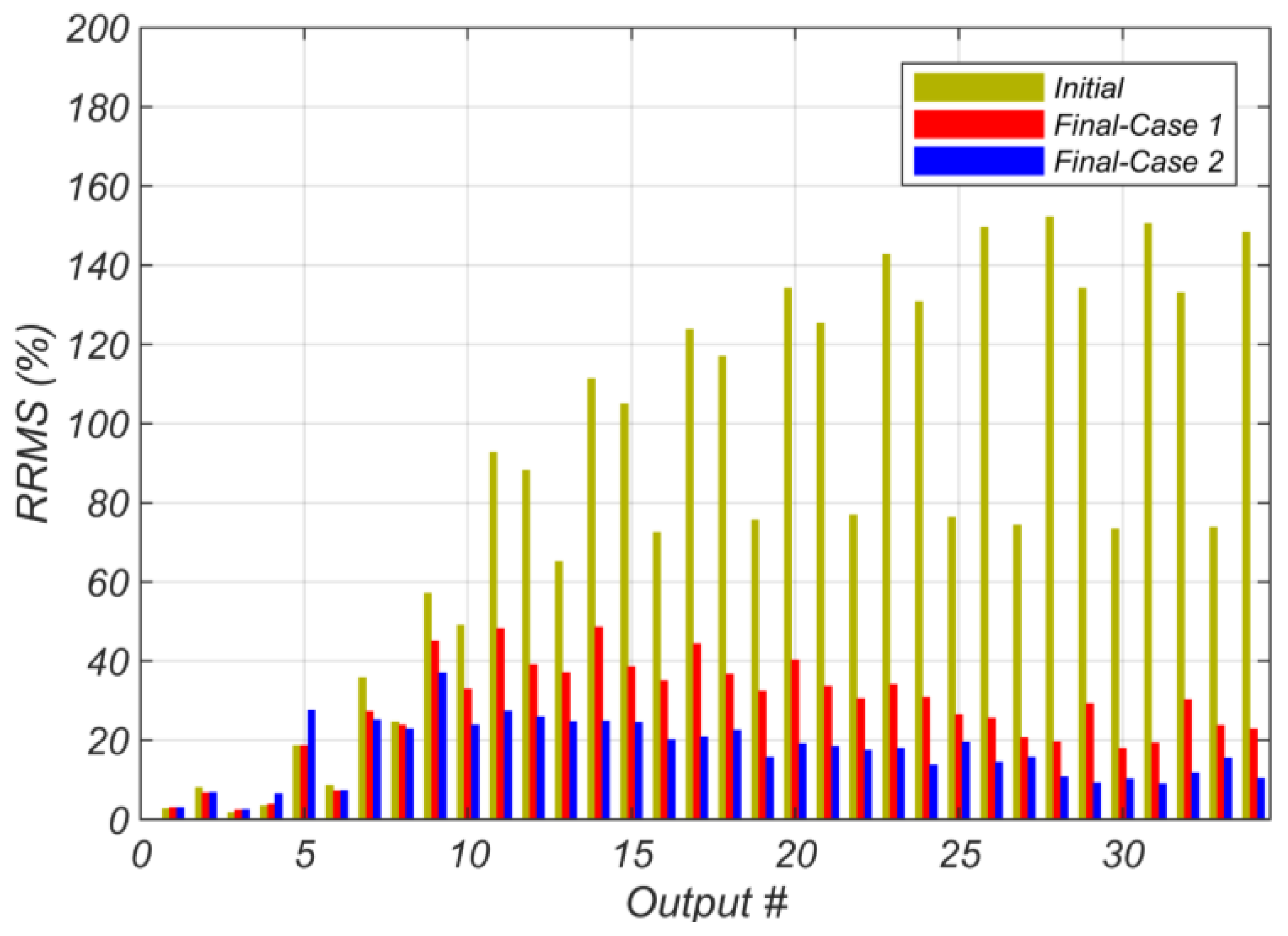
5.2. Joint System and Partial Input Identification Using Yorba Linda Earthquake Data
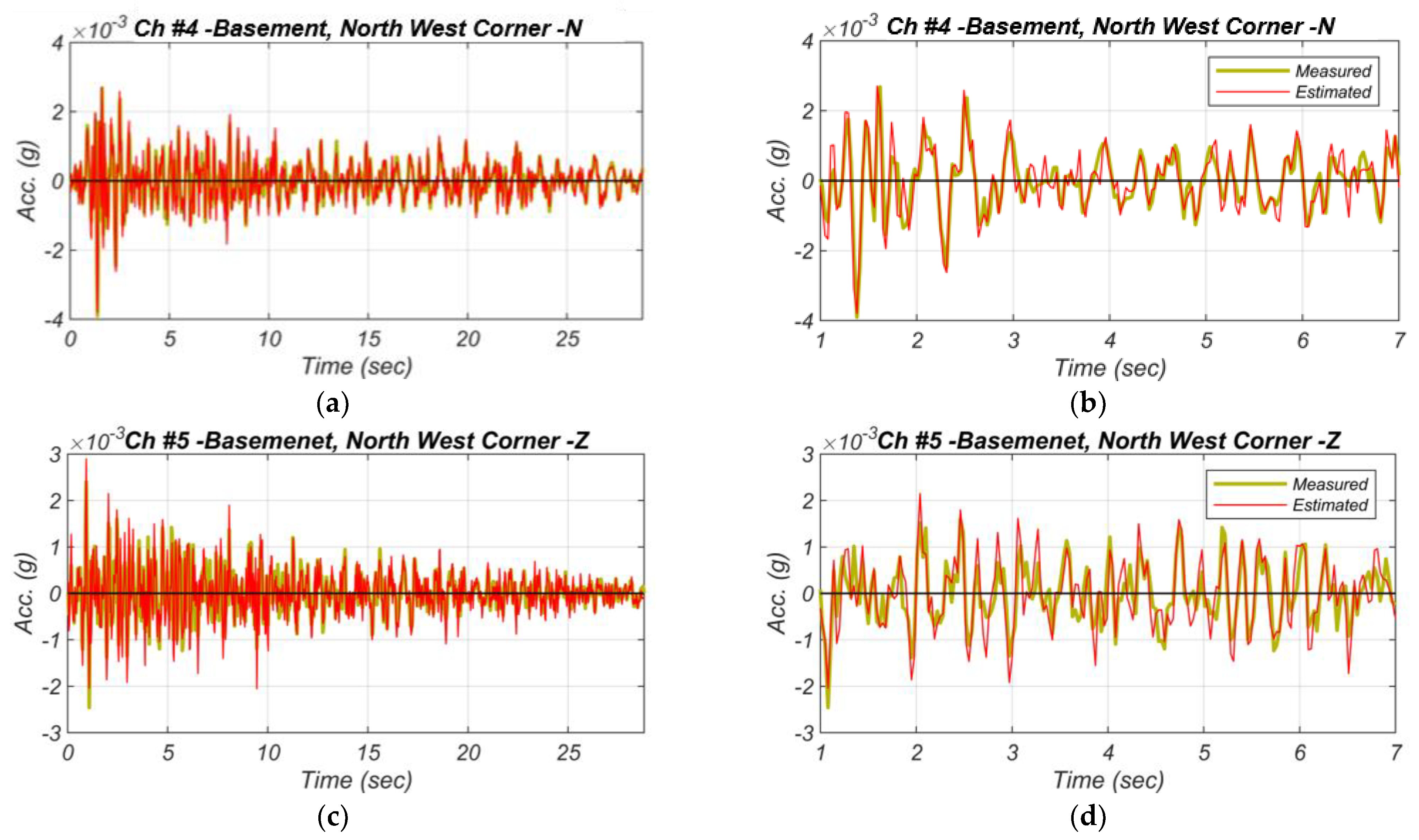
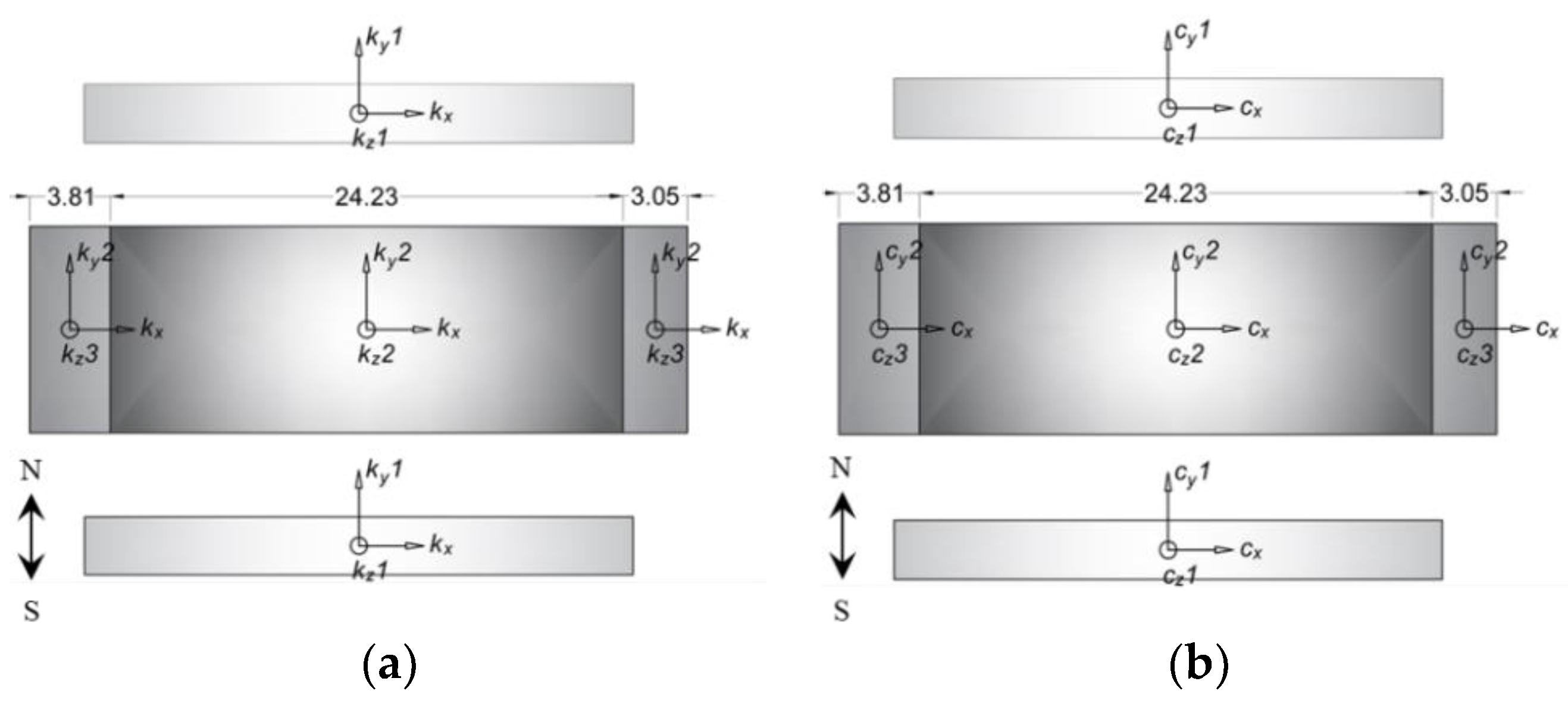
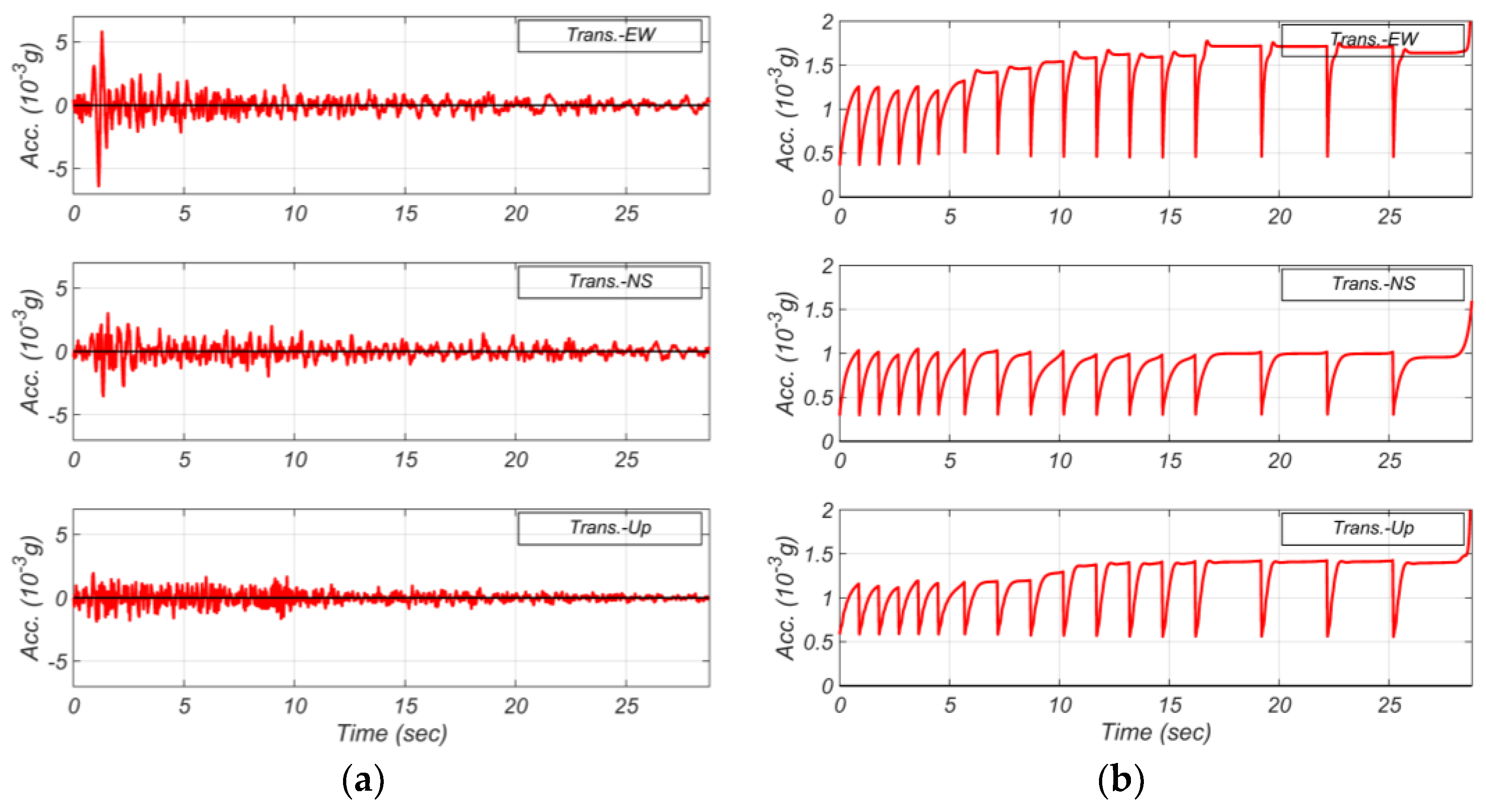
6. Step 2 System Identification: FE Model Updating of the Soil–Structure System with Unknown Inputs
6.1. Model Identifiability and Parameter Selection
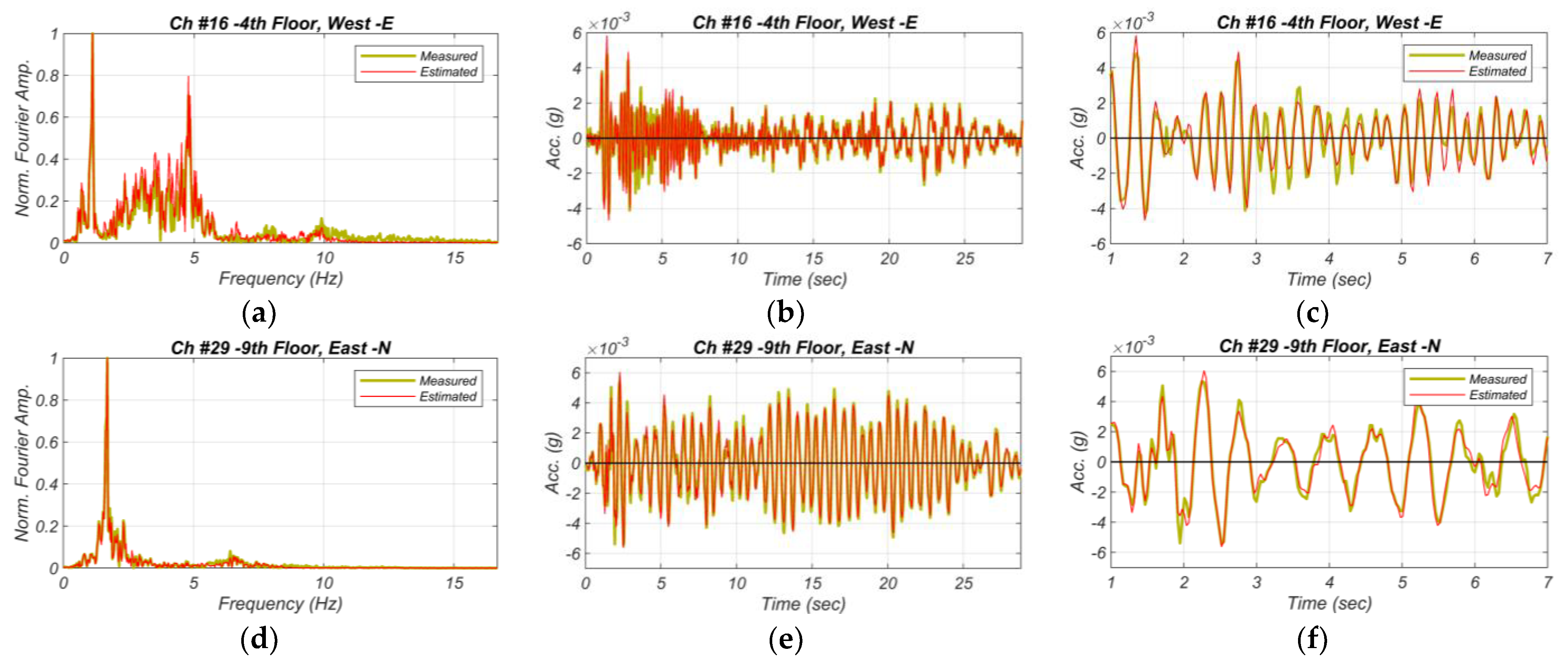
6.2. Joint System and Input Identification Using the Recorded Yorba Linda Earthquake Data
7. Summary and Discussion
7.1. Effective Structural Stiffness Parameters
7.2. Soil Subsystem Stiffness and Viscosity
7.3. Period Elongation
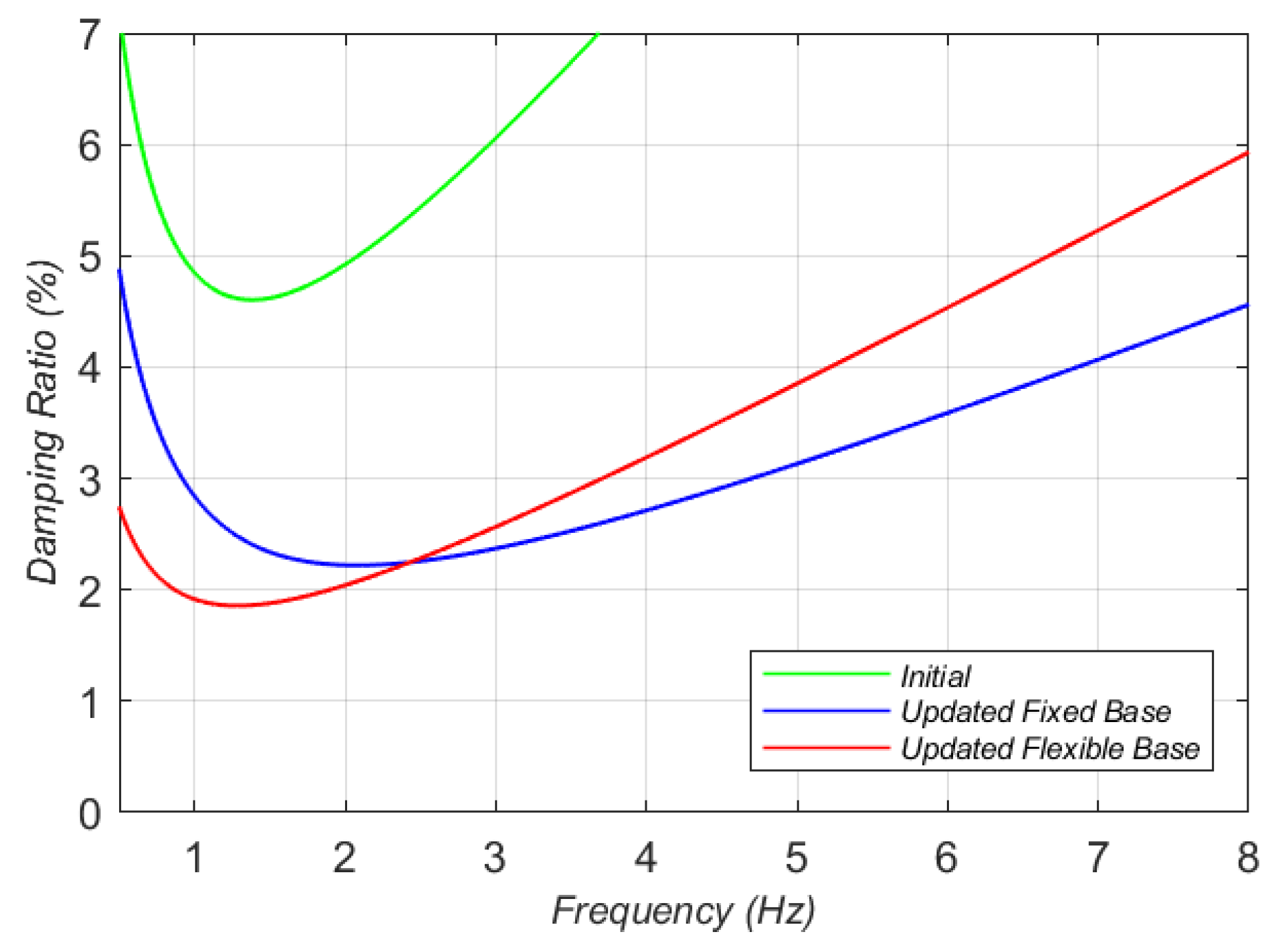
7.4. Rayleigh Damping
7.5. Possible Sources of Estimation Uncertainty
8. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
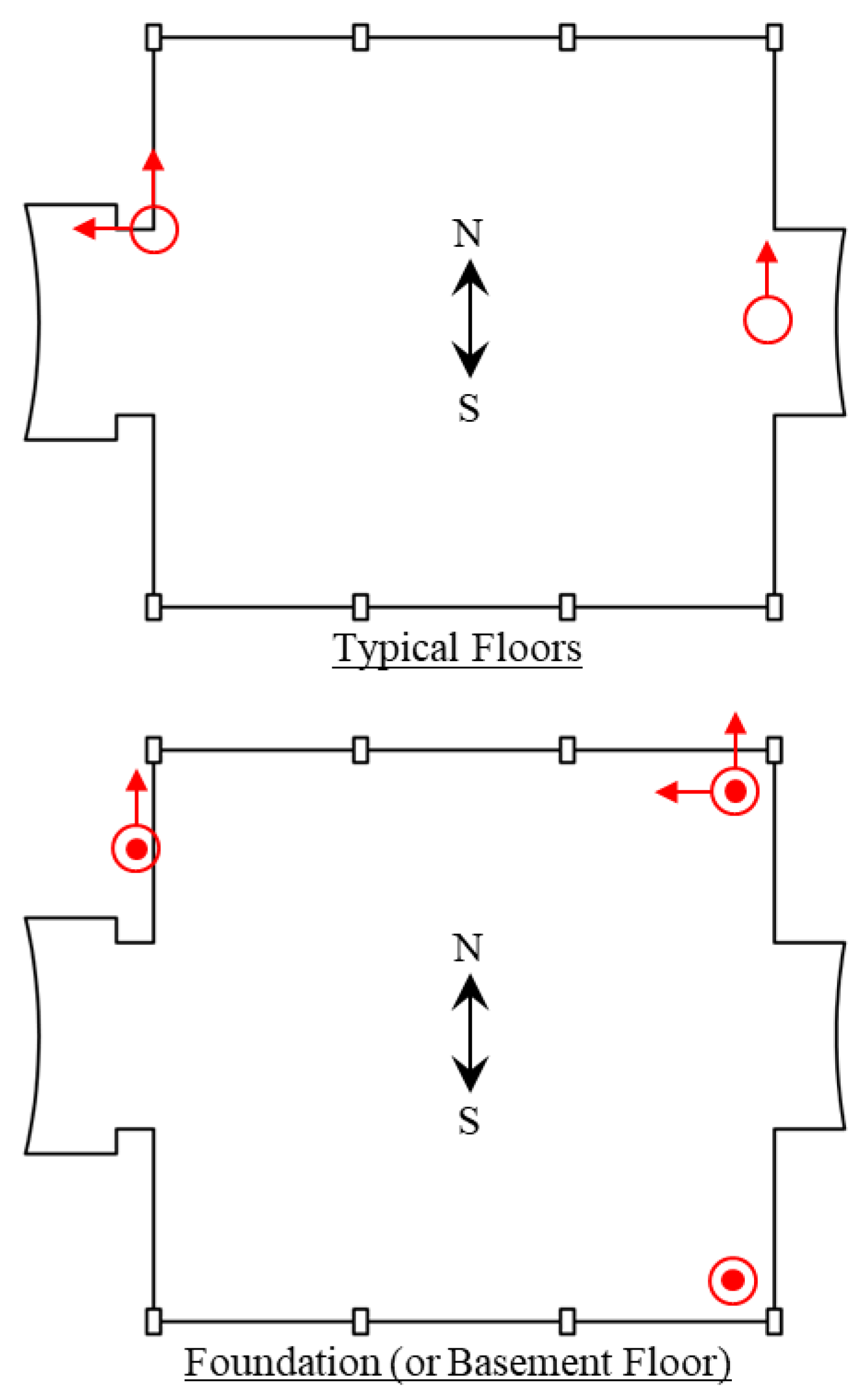
Appendix A. Instrumentation Plan for the Millikan Library

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Channel # | Sensor Location | Measurement Direction |
|---|---|---|
| 1 | Basement, North East Corner | N |
| 2 | Basement, North East Corner | Up |
| 3 | Basement, North East Corner | E |
| 4 | Basement, North West Corner | N |
| 5 | Basement, North West Corner | Up |
| 6 | Basement, South East Corner | Up |
| 7 | 1st Floor, East | N |
| 8 | 1st Floor, West | E |
| 9 | 1st Floor, West | N |
| 10 | 2nd Floor, West | E |
| 11 | 2nd Floor, West | N |
| 12 | 3rd Floor, East | N |
| 13 | 3rd Floor, West | E |
| 14 | 3rd Floor, West | N |
| 15 | 4th Floor, East | N |
| 16 | 4th Floor, West | E |
| 17 | 4th Floor, West | N |
| 18 | 5th Floor, East | N |
| 19 | 5th Floor, West | E |
| 20 | 5th Floor, West | N |
| 21 | 6th Floor, East | N |
| 22 | 6th Floor, West | E |
| 23 | 6th Floor, West | N |
| 24 | 7th Floor, East | N |
| 25 | 7th Floor, West | E |
| 26 | 7th Floor, West | N |
| 27 | 8th Floor, West | E |
| 28 | 8th Floor, West | N |
| 29 | 9th Floor, East | N |
| 30 | 9th Floor, West | E |
| 31 | 9th Floor, West | N |
| 32 | Roof, East | N |
| 33 | Roof, West | E |

References
- ASCE/SEI 7-10; Minimum Design Loads for Buildings and Other Structures. American Society of Civil Engineers: Reston, VA, USA, 2010.
- PEER. Guidelines for Performance-Based Seismic Design of Tall Buildings; Pacific Earthquake Engineering Research Center as part of the Tall Buildings Initiative, University of California: Berkeley, CA, USA, 2010. [Google Scholar]
- Stewart, J.; Crouse, C.; Hutchinson, T.; Lizundia, B.; Naeim, F.; Ostadan, F. Soil-Structure Interaction for Building Structures; Grant/Contract Reports (NISTGCR); National Institute of Standards and Technology (NIST): Gaithersburg, MD, USA, 2012.
- Roesset, J.M. A review of soil-structure interaction. In Soil-Structure Interaction: The Status of Current Analysis Methods and Research, Rep. No. NUREG/CR-1780 and UCRL; Nuclear Regulatory Commission: Washington, DC, USA, 1980. [Google Scholar]
- Tileylioglu, S.; Stewart, J.P.; Nigbor, R.L. Dynamic Stiffness and Damping of a Shallow Foundation from Forced Vibration of a Field Test Structure. J. Geotech. Geoenviron. Eng. 2011, 137, 344–353. [Google Scholar] [CrossRef]
- Jennings, P.C.; Kuroiwa, J.H. Vibration and soil-structure interaction tests of a nine-story reinforced concrete building. Bull. Seism. Soc. Am. 1968, 58, 891–916. [Google Scholar] [CrossRef]
- Wolf, J.P.; Deeks, A.J. Foundation Vibration Analysis: A strength of Materials Approach; Elsevier: Amsterdam, The Netherlands, 2004. [Google Scholar]
- Stewart, J.P.; Seed, R.B.; Fenves, G.L. Empirical Evaluation of Inertial Soil-Structure Interaction Effects; Pacific Earthquake Engineering Research Center: Berkeley, CA, USA, 1998. [Google Scholar]
- Pais, A.L.; Kausel, E. On rigid foundations subjected to seismic waves. Earthq. Eng. Struct. Dyn. 1989, 18, 475–489. [Google Scholar] [CrossRef]
- Luco, J.E.; Westmann, R.A. Dynamic Response of a Rigid Footing Bonded to an Elastic Half Space. J. Appl. Mech. 1972, 39, 527–534. [Google Scholar] [CrossRef]
- Ebrahimian, H.; Astroza, R.; Conte, J.P.; Papadimitriou, C. Bayesian optimal estimation for output-only nonlinear system and damage identification of civil structures. Struct. Control. Health Monit. 2018, 25, e2128. [Google Scholar] [CrossRef]
- Ebrahimian, H.; Astroza, R.; Conte, J.P. Extended Kalman filter for material parameter estimation in nonlinear structural finite element models using direct differentiation method. Earthq. Eng. Struct. Dyn. 2015, 44, 1495–1522. [Google Scholar] [CrossRef]
- Astroza, R.; Ebrahimian, H.; Conte, J.P. Material Parameter Identification in Distributed Plasticity FE Models of Frame-Type Structures Using Nonlinear Stochastic Filtering. J. Eng. Mech. 2015, 141. [Google Scholar] [CrossRef]
- Ebrahimian, H.; Astroza, R.; Conte, J.P.; de Callafon, R.A. Nonlinear finite element model updating for damage identification of civil structures using batch Bayesian estimation. Mech. Syst. Signal Process. 2016, 84, 194–222. [Google Scholar] [CrossRef]
- Beck, J.L.; Katafygiotis, L.S. Updating models and their uncertainties. I: Bayesian statistical framework. J. Eng. Mech. ASCE 1998, 124, 455–462. [Google Scholar] [CrossRef]
- Beck, J.L. Bayesian system identification based on probability logic. Struct. Control. Health Monit. 2010, 17, 825–847. [Google Scholar] [CrossRef]
- Simon, D. Optimal State Estimation: Kalman, H infinity, and Nonlinear Approaches; John Wiley & Sons: Hoboken, NJ, USA, 2006. [Google Scholar]
- Astroza, R.; Ebrahimian, H.; Conte, J.P. Batch and Recursive Bayesian Estimation Methods for Nonlinear Structural System Identification; Springer: Berlin/Heidelberg, Germany, 2017; pp. 341–364. [Google Scholar] [CrossRef]
- Conte, J.P.; Vijalapura, P.K.; Meghella, M. Consistent Finite-Element Response Sensitivity Analysis. J. Eng. Mech. 2003, 129, 1380–1393. [Google Scholar] [CrossRef]
- McKenna, F. OpenSees: A Framework for Earthquake Engineering Simulation. Comput. Sci. Eng. 2011, 13, 58–66. [Google Scholar] [CrossRef]
- MathWorks. MATLAB 2022a, MathWorks: Natick, MA, USA, 2022.
- Simon, D.; Simon, D.L. Constrained Kalman filtering via density function truncation for turbofan engine health estimation. Int. J. Syst. Sci. 2010, 41, 159–171. [Google Scholar] [CrossRef]
- Ebrahimian, H.; Kohler, M.; Massari, A.; Asimaki, D. Parametric estimation of dispersive viscoelastic layered media with application to structural health monitoring. Soil Dyn. Earthq. Eng. 2018, 105, 204–223. [Google Scholar] [CrossRef]
- Kuroiwa, J.H. Vibration Test of a Multistory Building; Caltech: Pasadena, CA, USA, 1967. [Google Scholar]
- Crouse, C.B.; Jennings, P.C. Soil-structure interaction during the San Fernando earthquake. Bull. Seism. Soc. Am. 1975, 65, 13–36. [Google Scholar] [CrossRef]
- Luco, J.E.; Trifunac, M.D.; Wong, H.L. On the apparent change in dynamic behavior of a nine-story reinforced concrete building. Bull. Seism. Soc. Am. 1987, 77, 1961–1983. [Google Scholar] [CrossRef]
- Bradford, S.C.; Clinton, J.F.; Favela, J.; Heaton, T.H. Results of Millikan Library Forced Vibration Testing; Caltech: Pasadena, CA, USA, 2004. [Google Scholar]
- Ghahari, S.F.; Abazarsa, F.; Avci, O.; Çelebi, M.; Taciroglu, E. Blind identification of the Millikan Library from earthquake data considering soil-structure interaction. Struct. Control Health Monit. 2015, 23, 684–706. [Google Scholar] [CrossRef]
- Taciroglu, E.; Ghahari, S.; Abazarsa, F. Efficient model updating of a multi-story frame and its foundation stiffness from earthquake records using a timoshenko beam model. Soil Dyn. Earthq. Eng. 2017, 92, 25–35. [Google Scholar] [CrossRef]
- Shirzad-Ghaleroudkhani, N.; Mahsuli, M.; Ghahari, S.F.; Taciroglu, E. Bayesian identification of soil-foundation stiffness of building structures. Struct. Control Health Monit. 2017, 25, e2090. [Google Scholar] [CrossRef]
- CESMID. Center for Engineering Strong Motion Data. Available online: https://www.strongmotioncenter.org/ (accessed on 10 October 2022).
- Computers and Structures. SAP2000. Available online: https://www.csiamerica.com/products/sap2000 (accessed on 10 October 2022).
- Ebrahimian, H.; Asimaki, D.; Kusanovic, D.; Ghahari, S.F. Untangling the Dynamics of Soil-Structure Interaction Using Nonlinear Finite Element Model Updating. In Proceedings of the SMIP17 Conference on Utilization of Strong-Motion Data, Berkeley, CA, USA, 19 October 2017. [Google Scholar]
- Ebrahimian, H.; Astroza, R.; Conte, J.P.; Bitmead, R.R. Information-Theoretic Approach for Identifiability Assessment of Nonlinear Structural Finite-Element Models. J. Eng. Mech. 2019, 145. [Google Scholar] [CrossRef]
- Brun, R.; Reichert, P.; Künsch, H.R. Practical identifiability analysis of large environmental simulation models. Water Resour. Res. 2001, 37, 1015–1030. [Google Scholar] [CrossRef]
- Yu, E.; Taciroglu, E.; Wallace, J.W. Parameter identification of framed structures using an improved finite element model-updating method—Part I: Formulation and verification. Earthq. Eng. Struct. Dyn. 2006, 36, 619–639. [Google Scholar] [CrossRef]
- Foutch, D.A.; Jennings, P.C. A study of the apparent change in the foundation response of a nine-story reinforced concrete building. Bull. Seism. Soc. Am. 1978, 68, 219–229. [Google Scholar] [CrossRef]
- Todorovska, M.I. Soil-Structure System Identification of Millikan Library North-South Response during Four Earthquakes (1970-2002): What Caused the Observed Wandering of the System Frequencies? Bull. Seism. Soc. Am. 2009, 99, 626–635. [Google Scholar] [CrossRef]
- ACI 318-14; Building Code Requirements for Structural Concrete and Commentary. American Concrete Institute: Farmington Hills, MI, USA, 2014.
- Pais, A.; Kausel, E. Approximate formulas for dynamic stiffnesses of rigid foundations. Soil Dyn. Earthq. Eng. 1988, 7, 213–227. [Google Scholar] [CrossRef]
- Wong, H.; Trifunac, M.; Luco, J. A comparison of soil-structure interaction calculations with results of full-scale forced vibration tests. Soil Dyn. Earthq. Eng. 1988, 7, 22–31. [Google Scholar] [CrossRef]
- Veletsos, A.S.; Meek, J.W. Dynamic behaviour of building-foundation systems. Earthq. Eng. Struct. Dyn. 1974, 3, 121–138. [Google Scholar] [CrossRef]
- He, X.; Moaveni, B.; Conte, J.P.; Elgamal, A.; Masri, S.F. System Identification of Alfred Zampa Memorial Bridge Using Dynamic Field Test Data. J. Struct. Eng. 2009, 135, 54–66. [Google Scholar] [CrossRef]
- Luco, J.E.; Trifunac, M.D.; Wong, H.L. Isolation of soil-structure interaction effects by full-scale forced vibration tests. Earthq. Eng. Struct. Dyn. 1988, 16, 1–21. [Google Scholar] [CrossRef]
- Cheng, M.H.; Heaton, T.H. Simulating Building Motions Using Ratios of the Building’s Natural Frequencies and a Timoshenko Beam Model. Earthq. Spectra 2015, 31, 403–420. [Google Scholar] [CrossRef]
- Balendra, T.; Tat, C.W.; Lee, S.-L. Modal damping for torsionally coupled buildings on elastic foundation. Earthq. Eng. Struct. Dyn. 1982, 10, 735–756. [Google Scholar] [CrossRef]
- Freddi, F.; Galasso, C.; Cremen, G.; Dall’Asta, A.; Di Sarno, L.; Giaralis, A.; Gutiérrez-Urzúa, F.; Málaga-Chuquitaype, C.; Mitoulis, S.A.; Petrone, C.; et al. Innovations in earthquake risk reduction for resilience: Recent advances and challenges. Int. J. Disaster Risk Reduct. 2021, 60, 102267. [Google Scholar] [CrossRef]
- Cruz, C.; Miranda, E. Evaluation of soil-structure interaction effects on the damping ratios of buildings subjected to earthquakes. Soil Dyn. Earthq. Eng. 2017, 100, 183–195. [Google Scholar] [CrossRef]
- Ghahari, S.F.; Sargsyan, K.; Çelebi, M.; Taciroglu, E. Quantifying modeling uncertainty in simplified beam models for building response prediction. Struct. Control Health Monit. 2022, 29, e3078. [Google Scholar] [CrossRef]















|
|
|
|
|
|
|
|
|
| Parameter ID | Description | Value |
|---|---|---|
| 1 | Elastic modulus of brace elements representing precast claddings | 20 GPa |
| 2 | Effective elastic modulus of beam and slab concrete at 1st floor | 5.8 GPa |
| 3 | Effective elastic modulus of beam and slab concrete at 2nd floor | 5.8 GPa |
| 4 | Effective elastic modulus of beam and slab concrete at 3rd floors | 5.8 GPa |
| 5 | Effective elastic modulus of beam and slab concrete at 4th, 5th, and 6th floors | 5.8 GPa |
| 6 | Effective elastic modulus of beam and slab concrete at 7th, 8th, 9th, and roof floors | 5.8 GPa |
| 7 | Effective elastic modulus of column and wall concrete at basement | 17.3 GPa |
| 8 | Effective elastic modulus of column and wall concrete at 1st story | 17.3 GPa |
| 9 | Effective elastic modulus of column and wall concrete at 2nd story | 17.3 GPa |
| 10 | Effective elastic modulus of column and wall concrete at 3rd, 4th, and 5th stories | 17.3 GPa |
| 11 | Effective elastic modulus of column and wall concrete at 6th, 7th, 8th, 9th, and roof stories | 17.3 GPa |
| 12 | Mass-proportional Rayleigh damping coefficient | 0.4 |
| 13 | Stiffness-proportional Rayleigh damping coefficient | 5.3 × 10−3 |
| 14 | Distributed floor mass on 1st to 9th floors | 250 kg/m2 |
| 15 | Distributed floor mass on roof | 300 kg/m2 |
| Parameter ID | Description | Value |
|---|---|---|
| 1 | Elastic modulus of brace elements representing precast claddings (EClad) | 20 GPa |
| 2 | Effective elastic modulus of column and wall concrete at basement and 1st story (EW&C1) | 17.3 GPa |
| 3 | Effective elastic modulus of column and wall concrete at 2nd story to roof (EW&C2) | 17.3 GPa |
| 4 | Mass-proportional Rayleigh damping coefficient (α) | 0.4 |
| 5 | Stiffness-proportional Rayleigh damping coefficient (β) | 5.3 × 10−3 |
| 6 | Distributed floor mass on 1st to roof floors (m) | 250 kg/m2 |
| Parameter | EClad | EW&C1 | EW&C2 | α | β | m |
|---|---|---|---|---|---|---|
| Initial Estimate | 20 GPa | 17.3 GPa | 17.3 GPa | 0.40 | 5.3 × 10−3 | 250 kg/m2 |
| Case 1—Final Estimate (COV) | 0.25 GPa (9.87%) | 16.2 GPa (0.41%) | 29.7 GPa (0.68%) | 0.24 (2.64%) | 2.6 × 10−3 (1.4%) | 2.8 kg/m2 (8.97%) |
| Case 2—Final Estimate (COV) | 6.17 GPa (2.87%) | 19.6 GPa (0.66%) | 26.1 GPa (0.84%) | 0.29 (2.61%) | 1.7 × 10−3 (2%) | 161 kg/m2 (2.44%) |
| Parameter ID | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
|---|---|---|---|---|---|---|---|---|
| Parameter | kx | ky1 | ky2 | kz1 | kz2 | kz3 | cx | cy1 |
| Value | 65 MN/m3 | 100 MN/m3 | 150 MN/m3 | 20 MN/m3 | 22.5 MN/m3 | 37.5 MN/m3 | 700 kN.s/m3 | 700 kN.s/m3 |
| Parameter ID | 9 | 10 | 11 | 12 | 13 | 14 | 15 | |
| Parameter | cy2 | cz1 | cz2 | cz3 | α | β | EFound | |
| Value | 700 kN.s/m3 | 1000 kN.s/m3 | 1000 kN.s/m3 | 1000 kN.s/m3 | 0.29 | 1.7 × 10−3 | 7.5 GPa |
| Parameter | kx | ky | kz1 | kz2 | kz3 |
|---|---|---|---|---|---|
| Initial Estimate | 200 MN/m3 | 200 MN/m3 | 225 MN/m3 | 225 MN/m3 | 225 MN/m3 |
| Final Estimate (COV) | 47.9 MN/m3 (2.7%) | 418.2 MN/m3 (4.9%) | 386.8 MN/m3 (0.9%) | 614.4 MN/m3 (3.4%) | 310.5 MN/m3 (3.4%) |
| Parameter | cx | cy | cz | α | β |
| Initial Estimate | 700 kN.s/m3 | 700 kN.s/m3 | 1000 kN.s/m3 | 0.29 | 1.7 × 10−3 |
| Final Estimate (COV) | 313.7 kN.s/m3 (13.1%) | 1187 kN.s/m3 (10.7%) | 4 kN.s/m3 (906.5%) | 0.15 (3.1%) | 2.3 × 10−3 (2%) |
| Foundation Vibration Mode | Trans.-EW | Trans.-NS | Trans.-Up | Rock.-EW | Rock.-NS | Torsion |
|---|---|---|---|---|---|---|
| Estimated Stiffness | 5.8 | 50.65 | 59.08 | 2.15 | 1.38 | 2.14 |
| NIST-based Stiffness | 5.14 | 5.27 | 6.08 | 6.16 | 3.98 | 7.08 |
| Estimated Viscosity | 0.04 | 0.14 | 0.0005 | 0.00002 | 0.00001 | 0.007 |
| NIST-based Viscosity | 0.13 | 0.13 | 0.23 | 0.005 | 0.004 | 0.038 |
| Study | Foundation Vibration Mode | ||||
|---|---|---|---|---|---|
| Trans.-EW | Trans.-NS | Rock.-EW | Rock.-NS | Torsional | |
| [6] | 31.1 | 8.7 | 207.2 | 145.9 | 9.9–10.5 |
| [44] | 6.9 | 4.6 | 10.0 | 5.4 | — |
| [41] | 7.2 | 6.7 | 10.2 | 5.9 | — |
| [26] | 5.5 | 5.2 | 7.4 | 5.6 | 11.1 |
| [45] | 2.7 | 2.7 | 1.8 | 1.8 | — |
| [28] | — | 6.2 | 2.5 | 3.9 | 0.98 |
| Current Study | 5.14 | 50.65 | 2.15 | 1.38 | 2.14 |
| Structural Vibration Mode | 1st Trans.-EW | 1st Trans.-NS | 1st Torsional | 2nd Trans.-EW | 2nd Trans.-NS |
|---|---|---|---|---|---|
| Flexible-base Period (s) | 0.95 | 0.6 | 0.42 | 0.22 | 0.16 |
| Fixed-base Period (s) | 0.88 | 0.5 | 0.37 | 0.2 | 0.16 |
| Period Elongation | 1.08 | 1.2 | 1.14 | 1.1 | 1.0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ebrahimian, H.; Taha, A.; Ghahari, F.; Asimaki, D.; Taciroglu, E. Estimation of Soil–Structure Model Parameters for the Millikan Library Building Using a Sequential Bayesian Finite Element Model Updating Technique. Buildings 2023, 13, 28. https://doi.org/10.3390/buildings13010028
Ebrahimian H, Taha A, Ghahari F, Asimaki D, Taciroglu E. Estimation of Soil–Structure Model Parameters for the Millikan Library Building Using a Sequential Bayesian Finite Element Model Updating Technique. Buildings. 2023; 13(1):28. https://doi.org/10.3390/buildings13010028
Chicago/Turabian StyleEbrahimian, Hamed, Abdelrahman Taha, Farid Ghahari, Domniki Asimaki, and Ertugrul Taciroglu. 2023. "Estimation of Soil–Structure Model Parameters for the Millikan Library Building Using a Sequential Bayesian Finite Element Model Updating Technique" Buildings 13, no. 1: 28. https://doi.org/10.3390/buildings13010028
APA StyleEbrahimian, H., Taha, A., Ghahari, F., Asimaki, D., & Taciroglu, E. (2023). Estimation of Soil–Structure Model Parameters for the Millikan Library Building Using a Sequential Bayesian Finite Element Model Updating Technique. Buildings, 13(1), 28. https://doi.org/10.3390/buildings13010028