
A Comparative Study of Explicit and Stable Time Integration Schemes for Heat Conduction in an Insulated Wall



Abstract
1. Introduction
2. The Studied Problem and the Methods
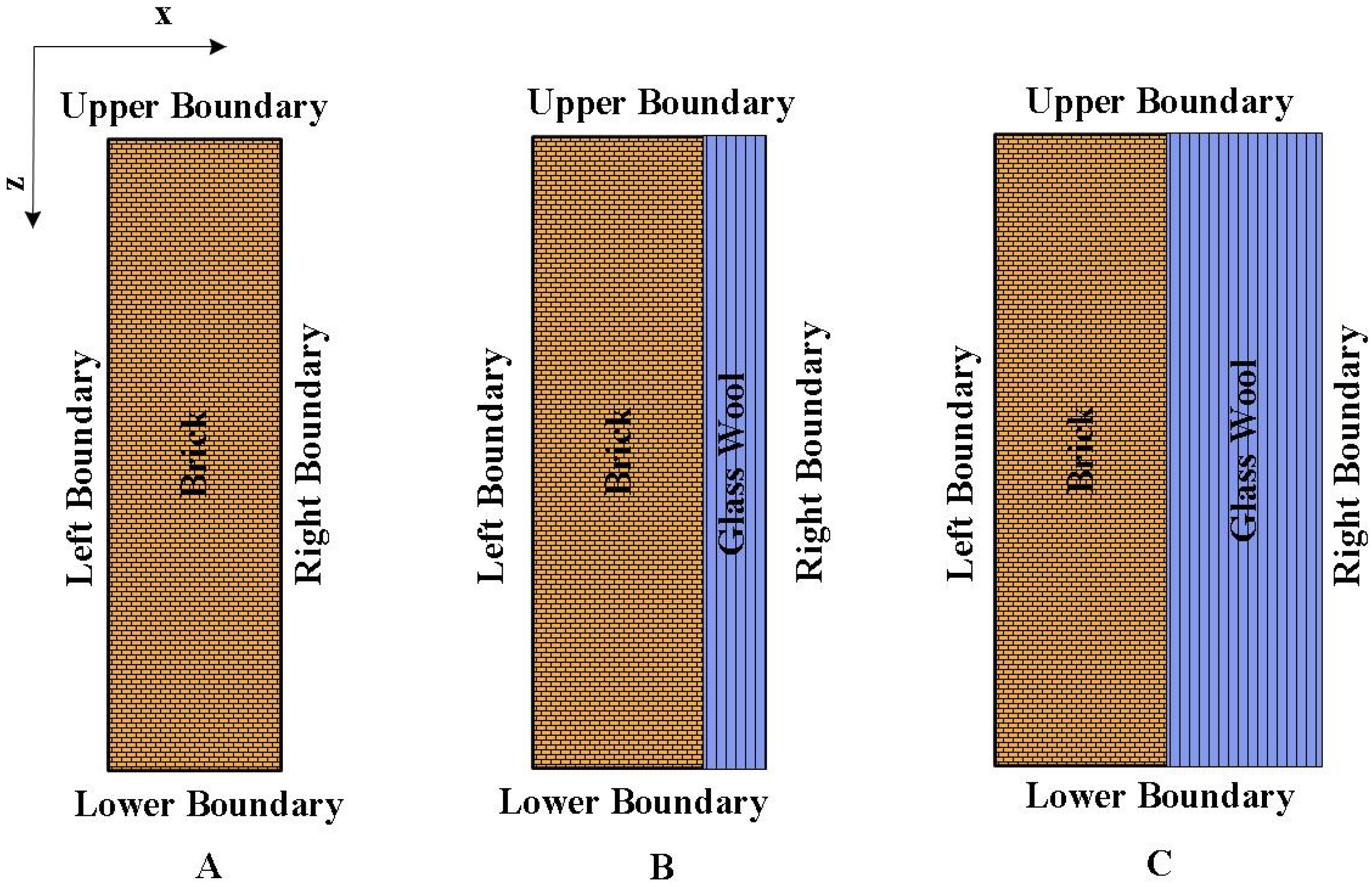
2.1. The Equation and Its Discretization and the Materials
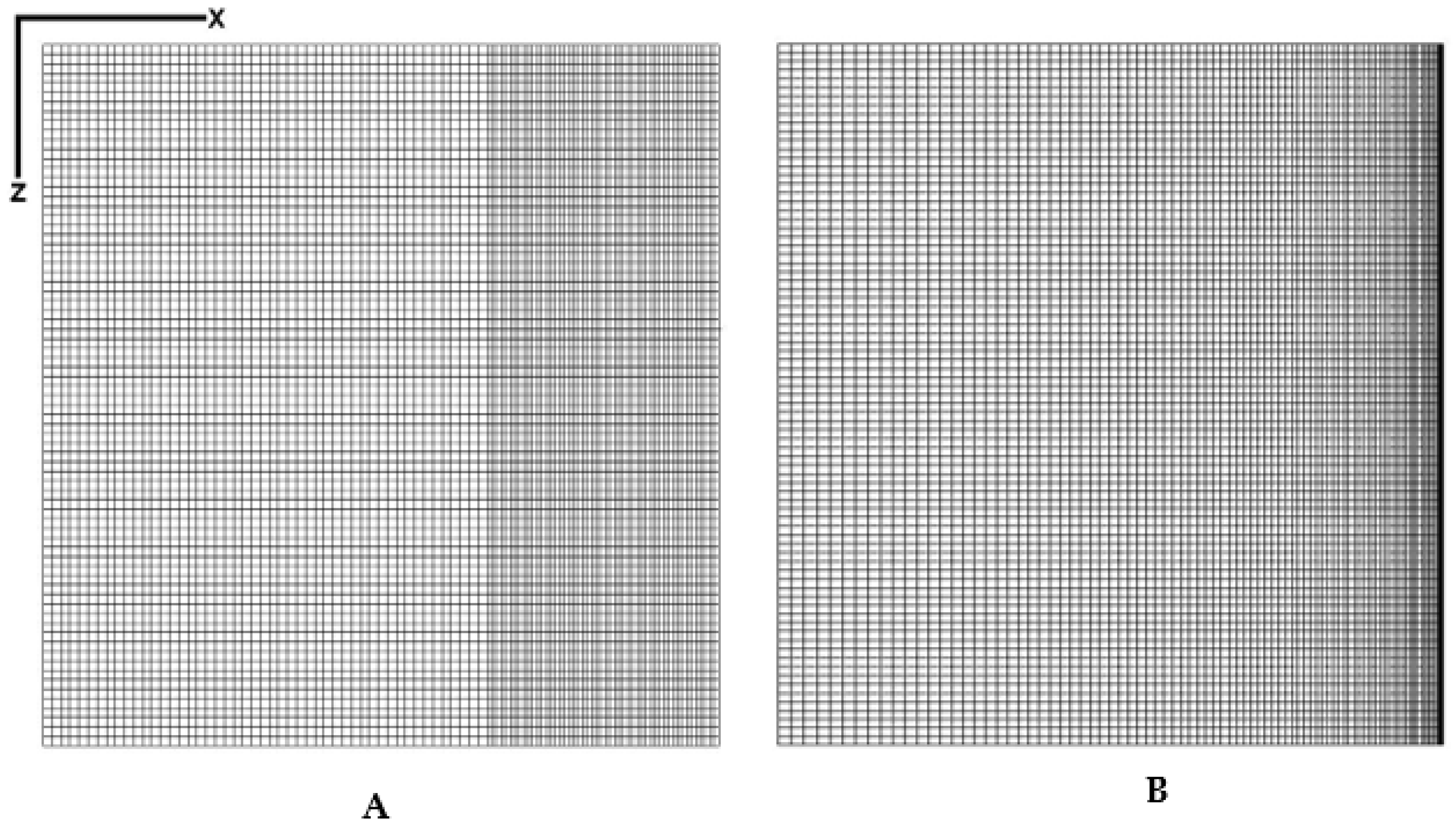
2.2. Mesh Construction
2.3. The Initial and the Boundary Conditions
- Sinusoidal initial condition with zero Dirichlet boundary condition.
- II.
- Linear initial condition with combined boundary conditions.
2.4. The Applied Numerical Methods
- 1.
- 2.
- The UPFD method is the theta-method (9) for . In the case of Equation (1), it reads as follows:
- 3.
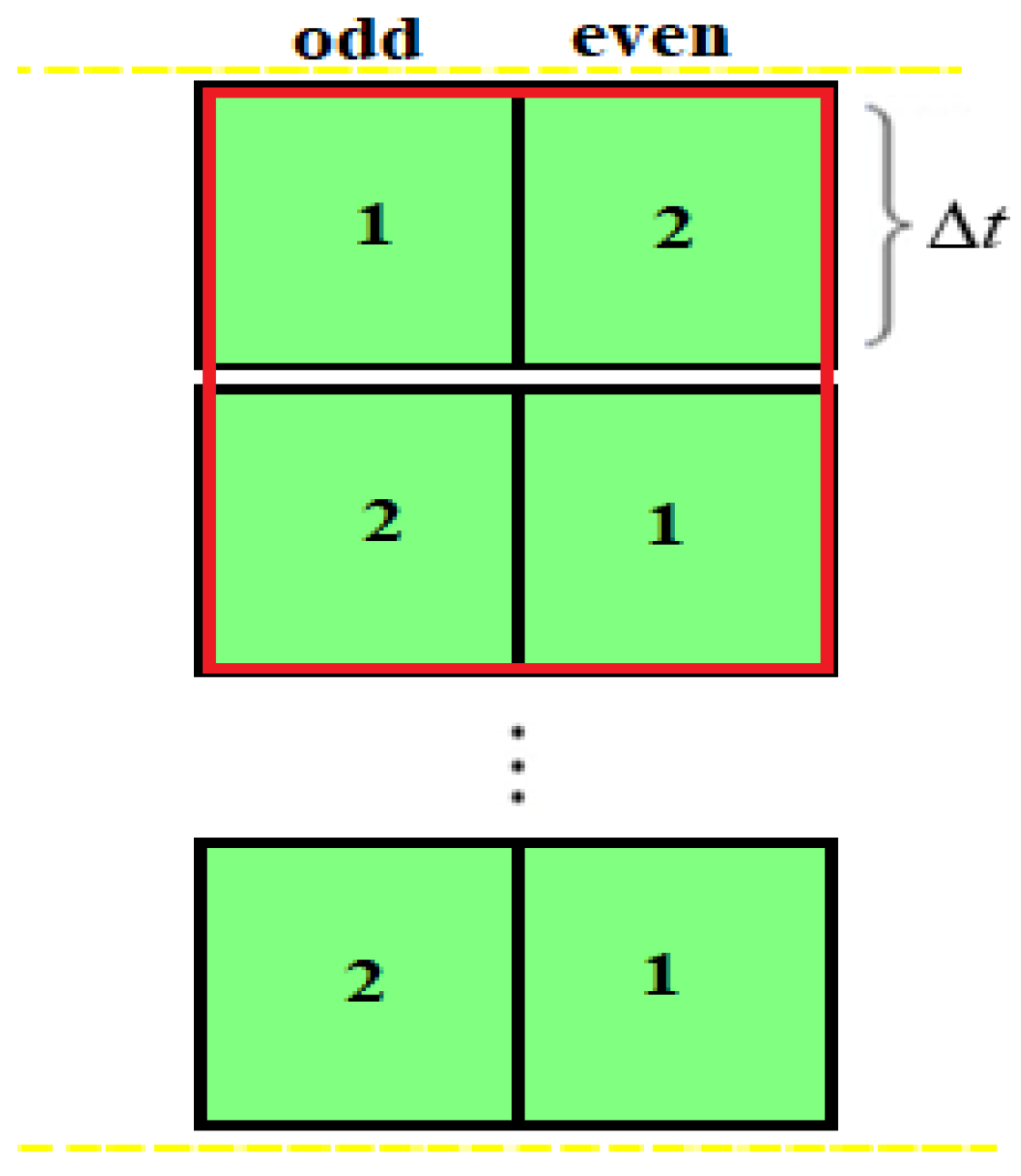
- If we would like to apply an odd-even hopscotch method, we need a bipartite grid, where all the nearest neighbors of the odd cells are even and vice versa. In the original odd-even hopscotch (OOEH) method [40], the standard explicit Euler formula was applied in the first stage and the implicit Euler formula was applied in the second stage, as is shown in Figure 3. The special and the general formulas are the following:

- 4.
- The reversed odd-even hopscotch method (ROEH) applies the formulas of the OOEH method in the opposite order. However, since the new values of the neighbors are not known when first-stage calculations begin, the implicit formula can be applied only with a trick, which is that of the UPFD method, see Formulas (10) and (11). Obtaining the code of this method is easy, since one only needs to change the order of the two formulas in the code of the original OOEH. We showed that this method produces much smaller errors in the case of very stiff systems than the OOEH method [32].
- 5.
- The next method is the two-stage linear-neighbor (LNe or LNe2) method [38]. It is based on the CNe method, which is used as a predictor to calculate new values valid at the end of the actual time step. Using them we can calculate slopes.
- 6.
- The values given in Equation (13) can be used to recalculate again, which makes sense to repeat (13) to obtain new results. In this case, we have three stages altogether, thus the method is called the LNe3 method [38]. This algorithm is still second order, but more accurate than LNe2.
- 7.
- The CpC algorithm [35] generally starts with a fractional time step with length , but here we take , because this version usually has better accuracy than for other values of p. So, in the first stage, we calculate new predictor values of the variables with the CNe formula, but with a time step:
- 8.
- Heun’s method, also called explicit trapezoidal rule, may be the most common second-order RK scheme [41]. It starts with an explicit Euler stage as a predictor:
- 9.
- In the case of the pseudo-implicit (PI) method, we took Algorithm 5 from [36] in the case of the pure heat equation with parameter setting , which gives the following two-stage algorithm for the special case:
- 10.
- The Dufort–Frankel (DF) algorithm can be obtained from the so-called leapfrog explicit scheme by a modification [42] (p. 313). It is a known explicit unconditionally stable scheme that has the formula in the special and general case:
- 11.
- Rational Runge-Kutta methods are a family of nonlinear methods, which means that the new values are not the linear combinations of the old values. We chose a two-stage version [43] defined as follows. The first stage is a full step by the explicit Euler (FTCS) to obtain the predicted value:
- 12.
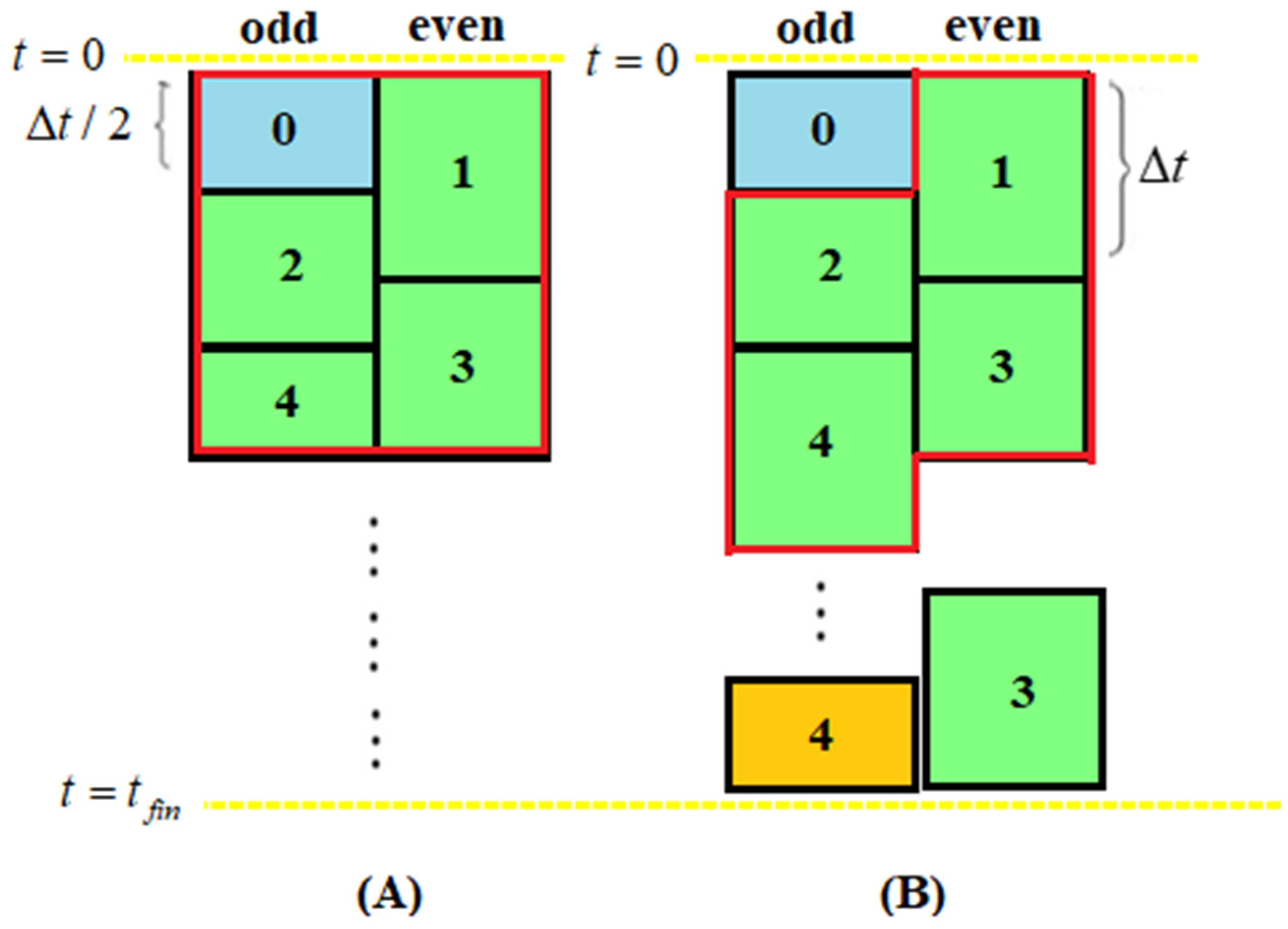
- In the shifted-hopscotch (SH) method [33], we have a repeating block consisting of five stages, which corresponds to two half and three full-time steps, which altogether span two time steps for odd as well as even cells, as one can see in Figure 4A. The calculation starts with a half-sized time step for the odd cells which is symbolized by a light blue box with the number 1 in the figure. Then, a full-time step for the even, the odd, and the even cells follows again. Finally, a half-size time step for the odd cells closes the calculation of the values. In our original work [33] we used the Formula (9)

- 13.
- Finally, in the leapfrog-hopscotch (LH) method [34] we have a structure consisting of two half and several full time steps. The calculation starts again by taking a half-sized time step for the odd nodes using the initial values, then, for the even and odd nodes, full-time steps are taken strictly alternately until the end of the last timestep (orange box in Figure 4B), which should be halved for odd nodes to reach the same final time point as the even nodes. In this paper, we used only the best already proven combination of formulas (L2 in [34]), which means that and are applied in Formulas (14) and (15) at the first and at all other time steps, respectively.
3. Results
3.1. Verification Using the Analytical Solution
- (a)
- Equidistant mesh.
- (b)
- Abrupt change in the x-direction, equidistant mesh in the z-direction.
- (c)
- Abrupt change in both x and z directions.
- (d)
- Gradual changing in x-direction, equidistant mesh in z-direction.
- (e)
- Gradual changing in both x and z directions.
- (f)
- Abrupt change in x-direction, gradual changing in z-direction.
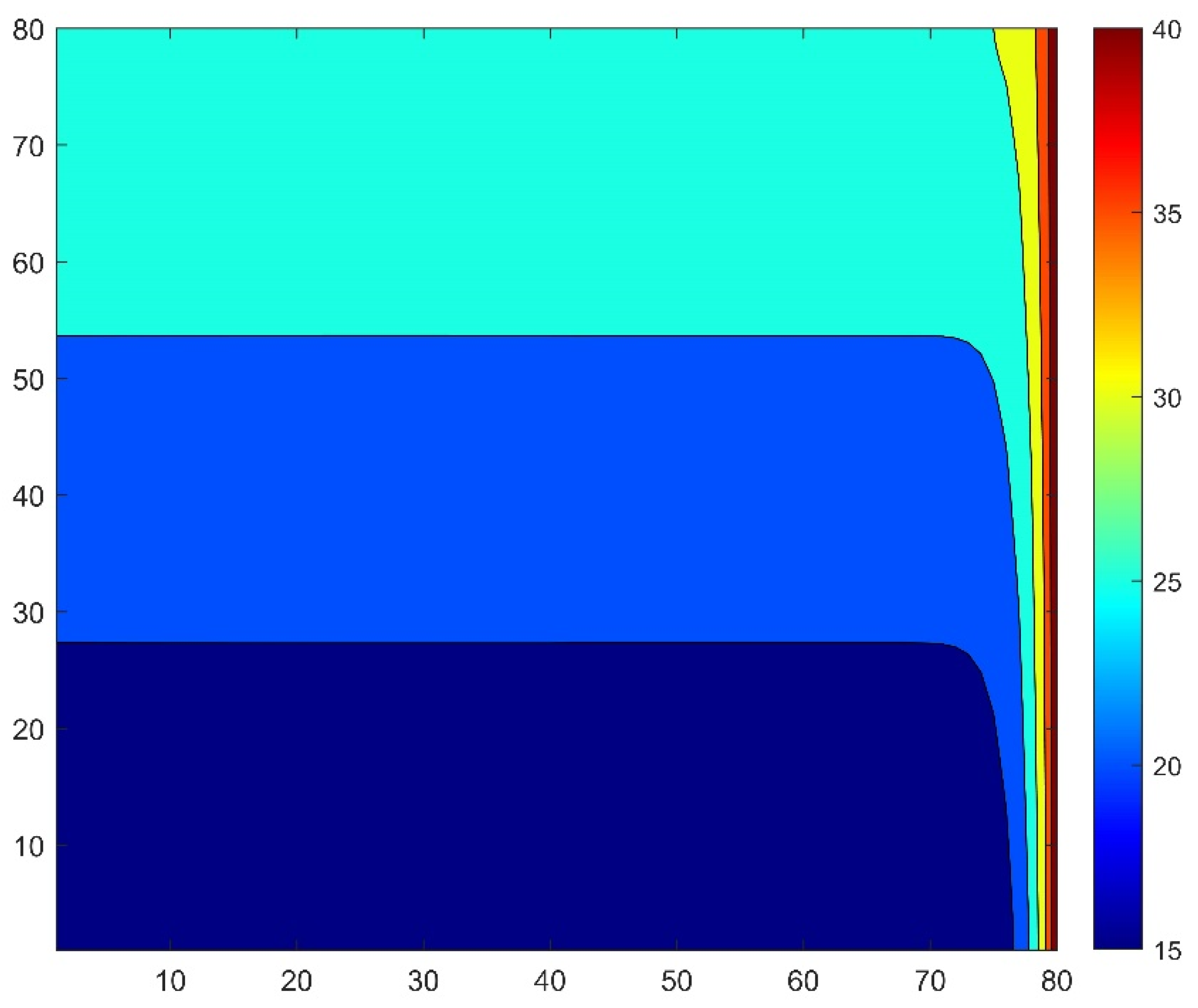
3.2. Brick Wall with Insulation, Dirichlet Boundary Conditions
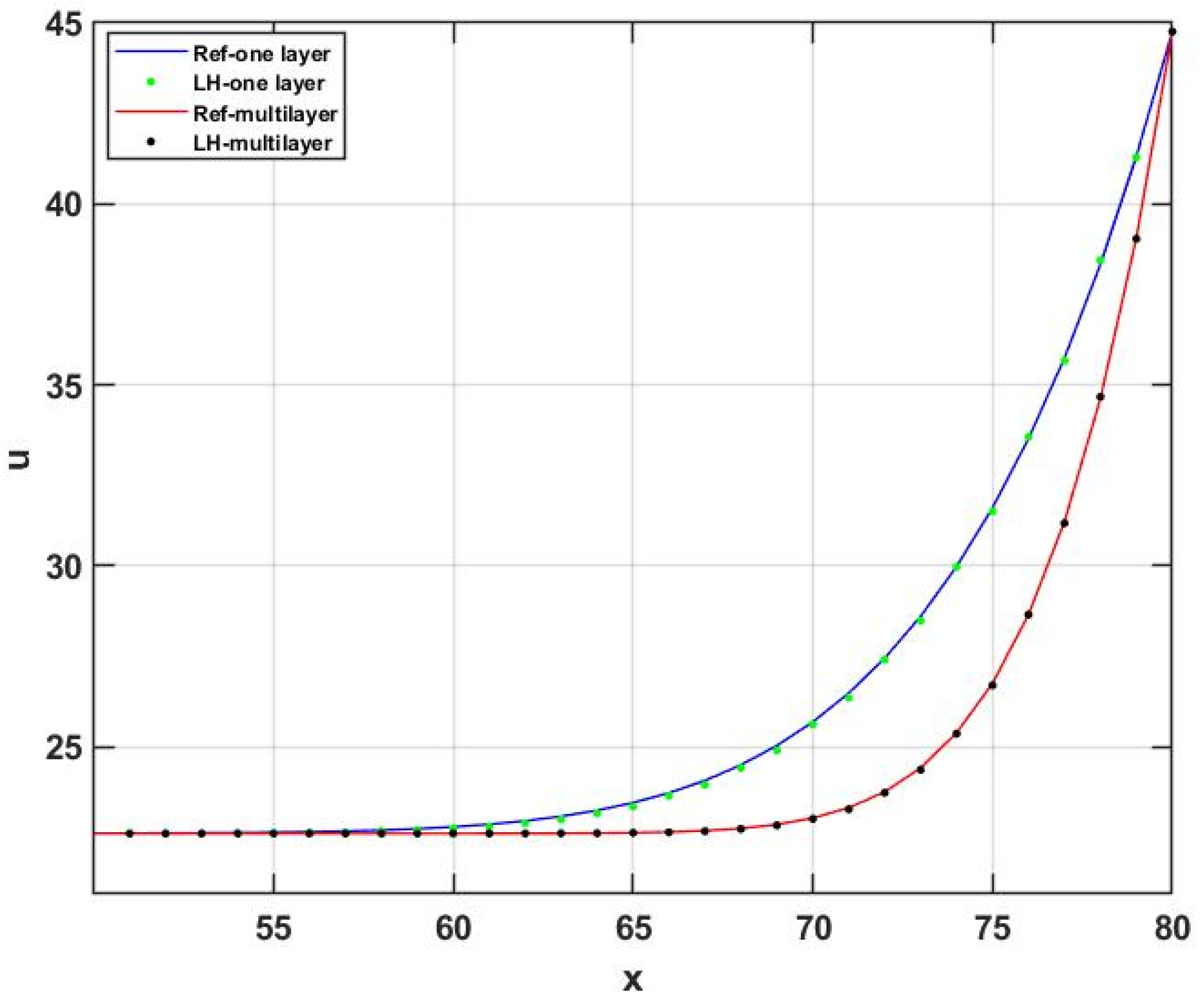
3.3. Realistic Case with Nontrivial Boundary Conditions
4. Discussion, Summary, and Future Plans
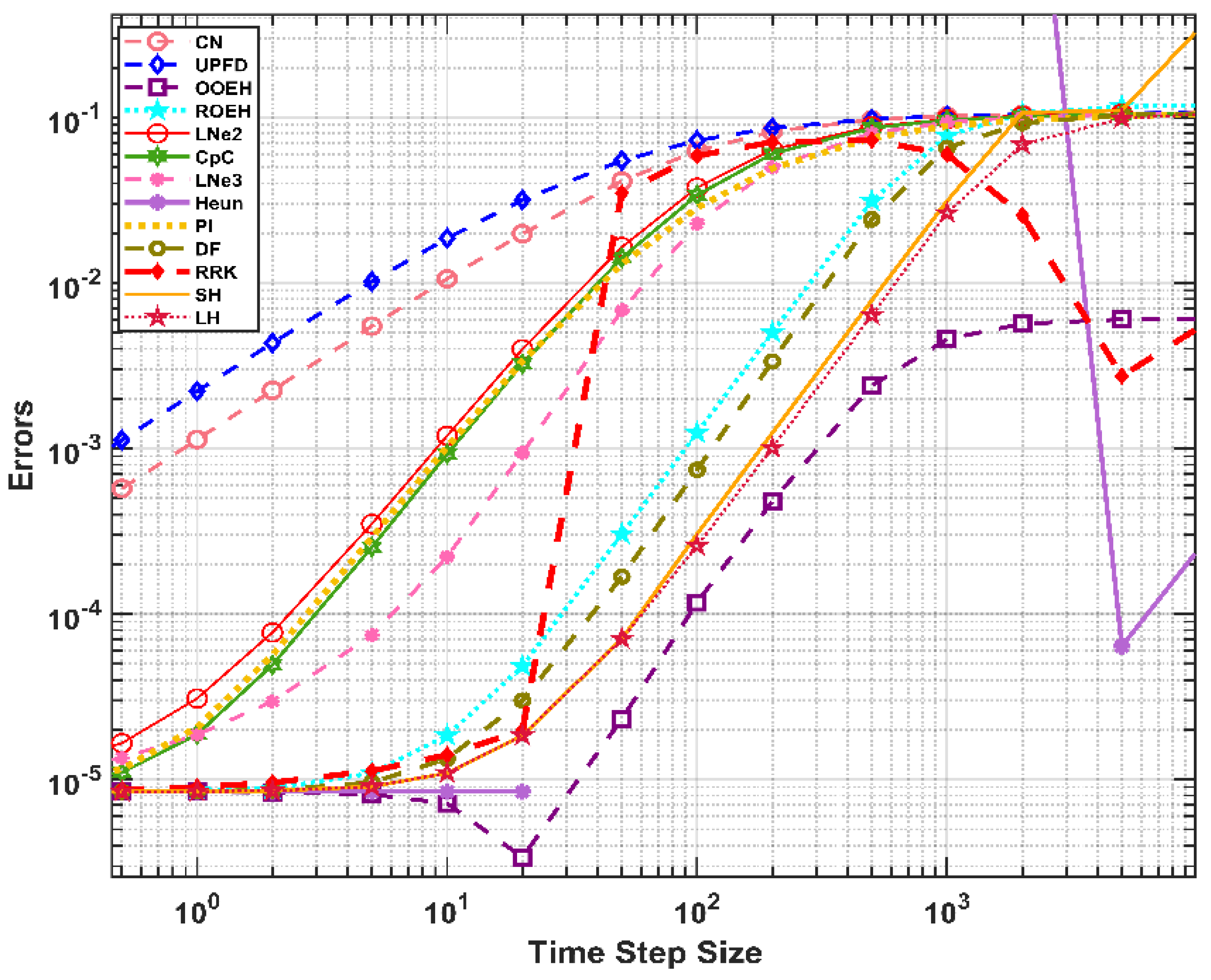
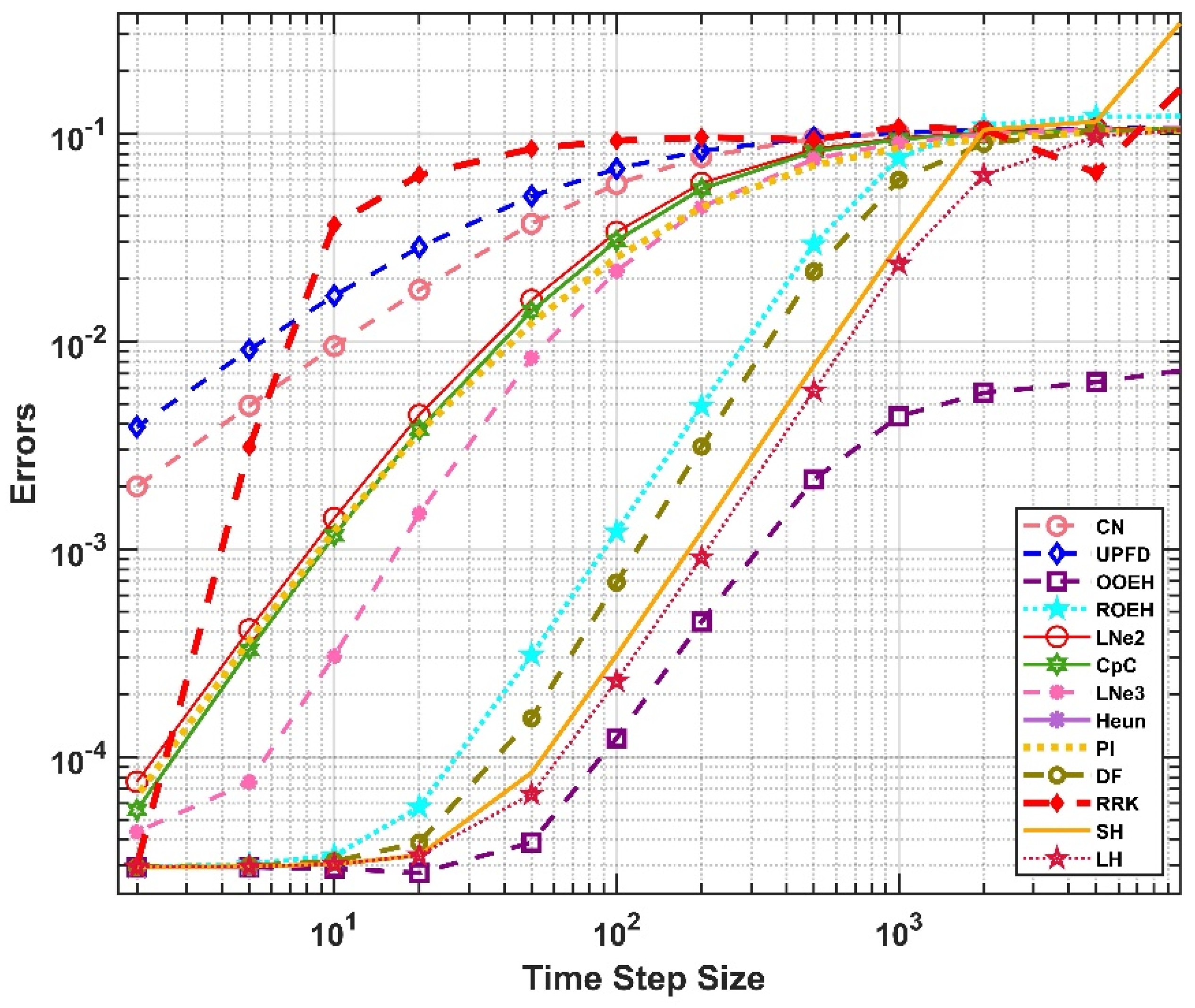
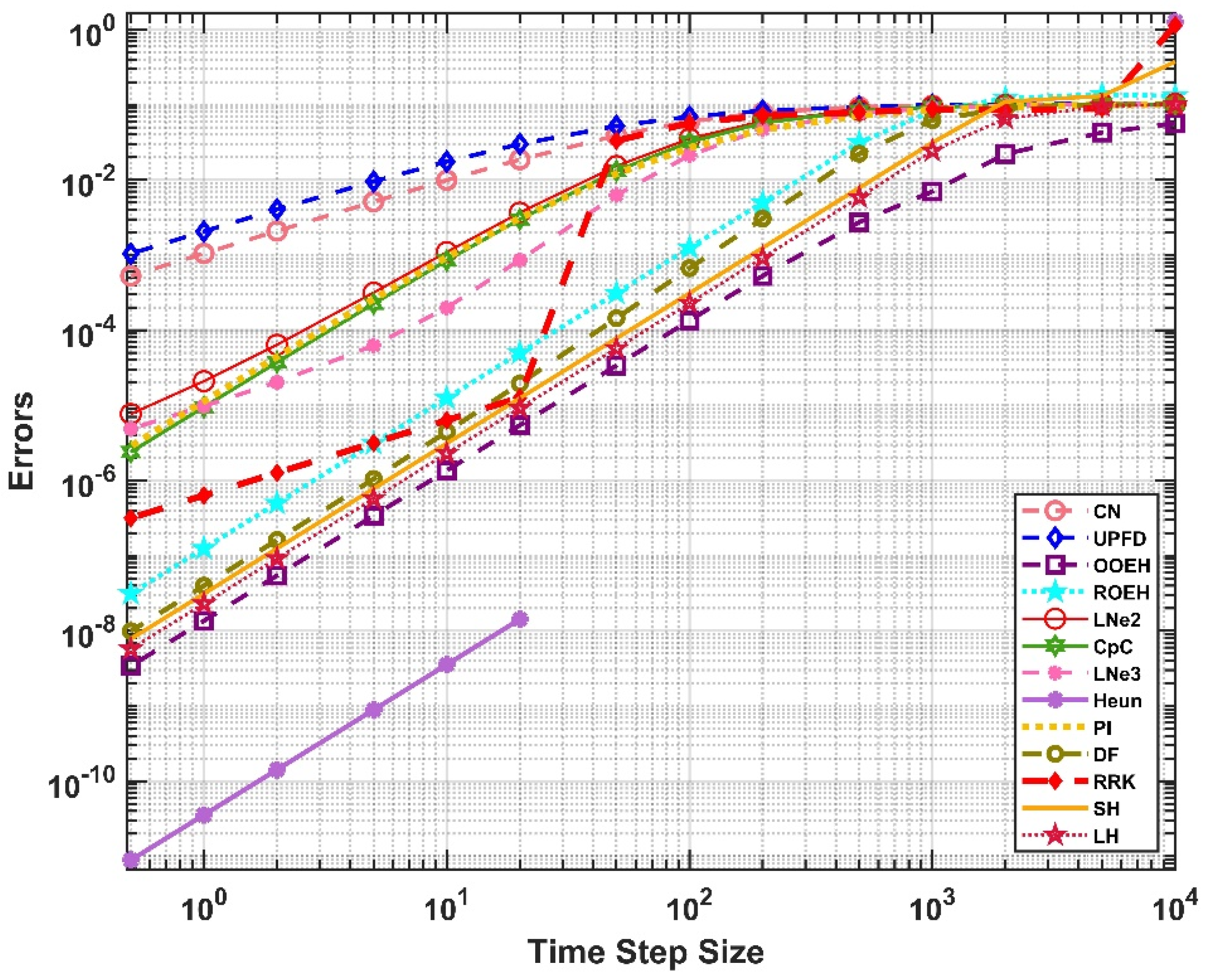
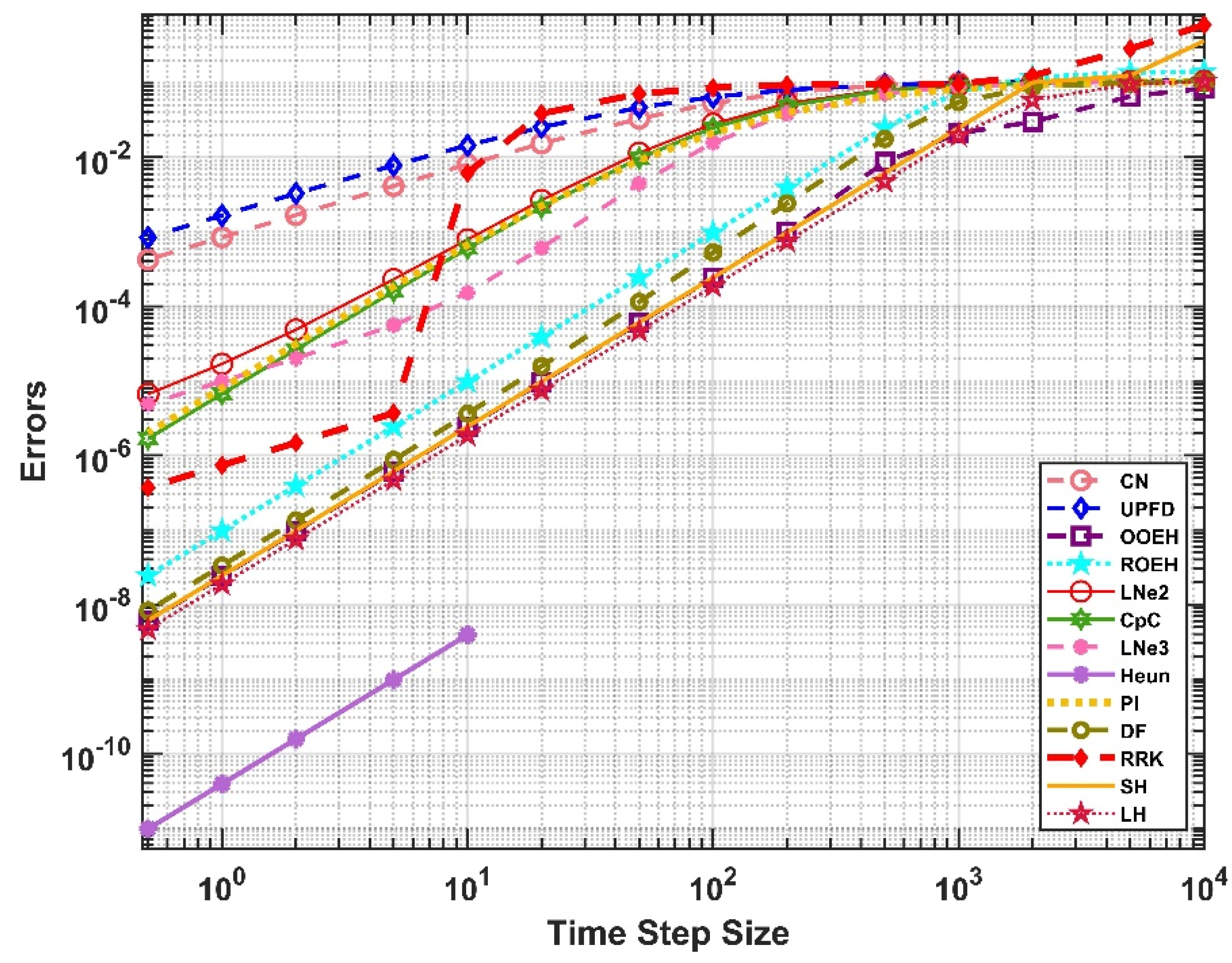
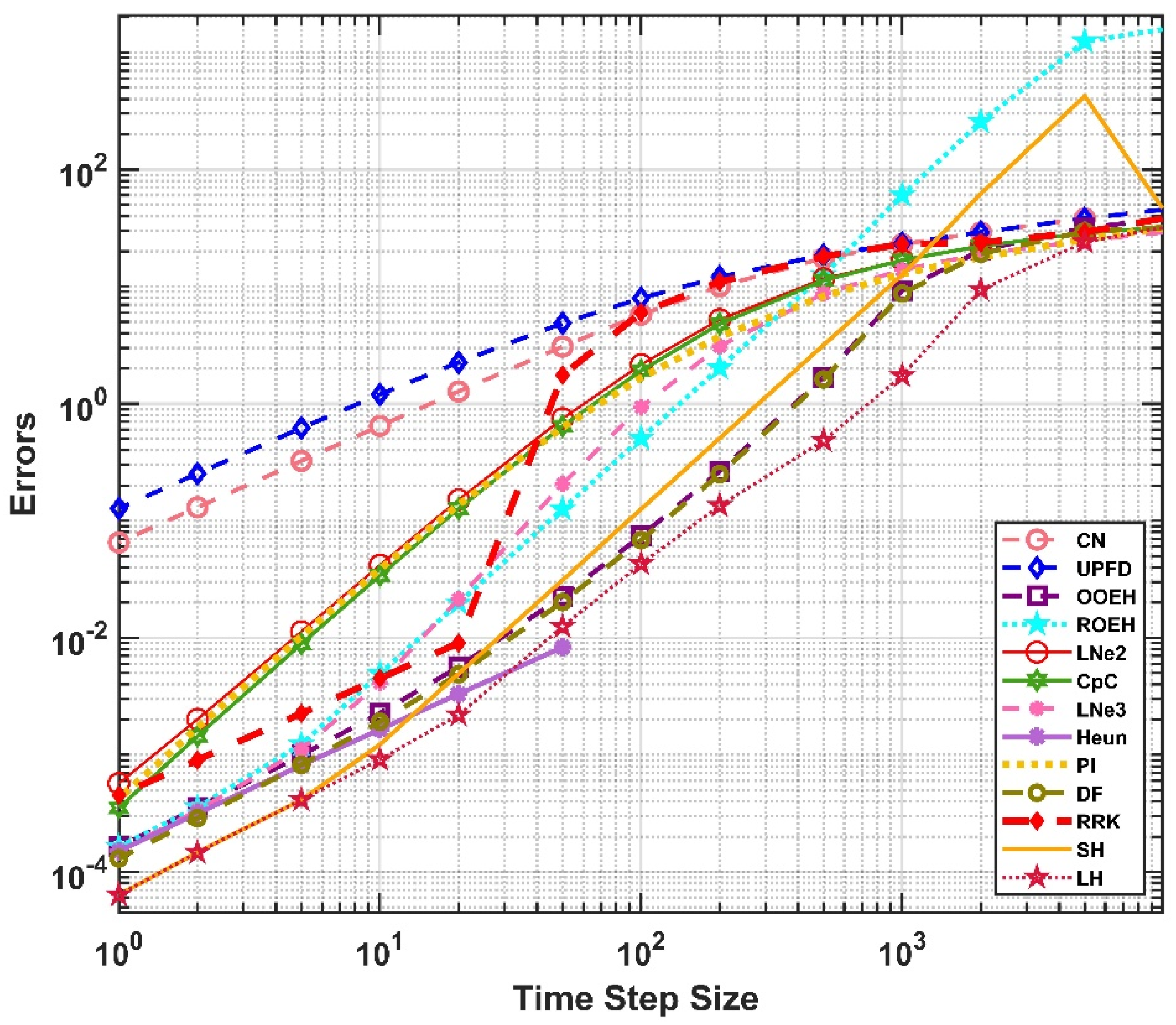
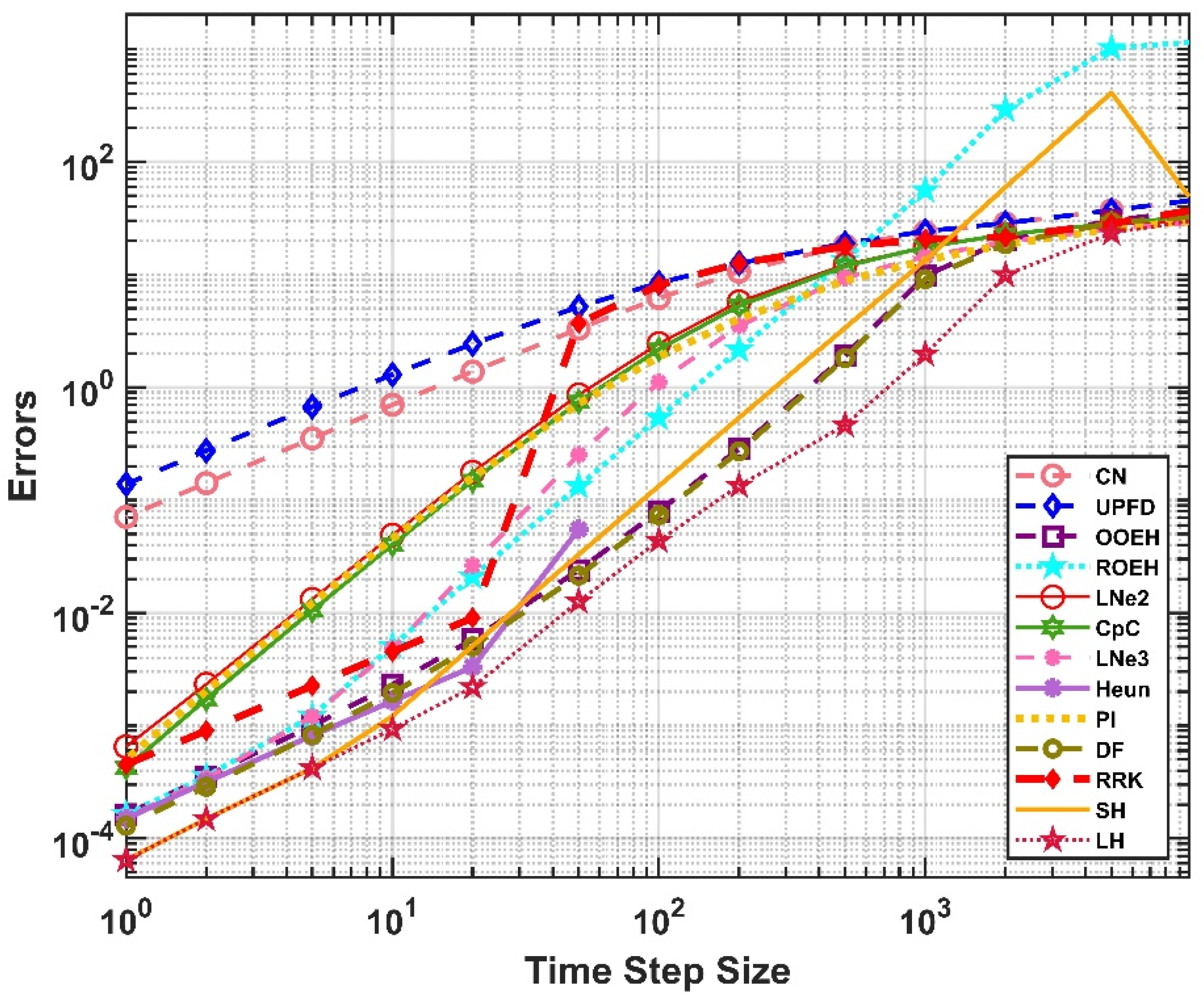
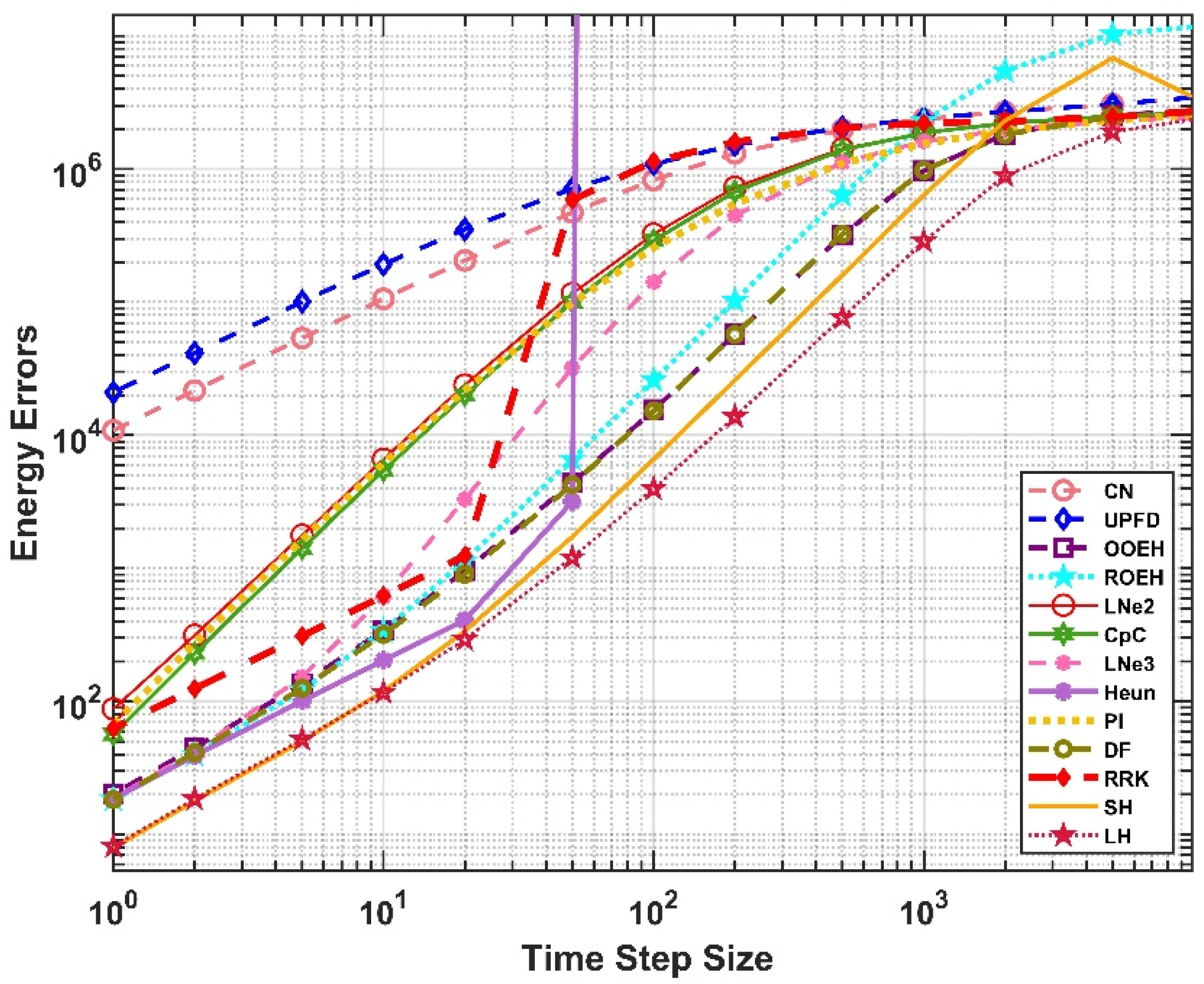
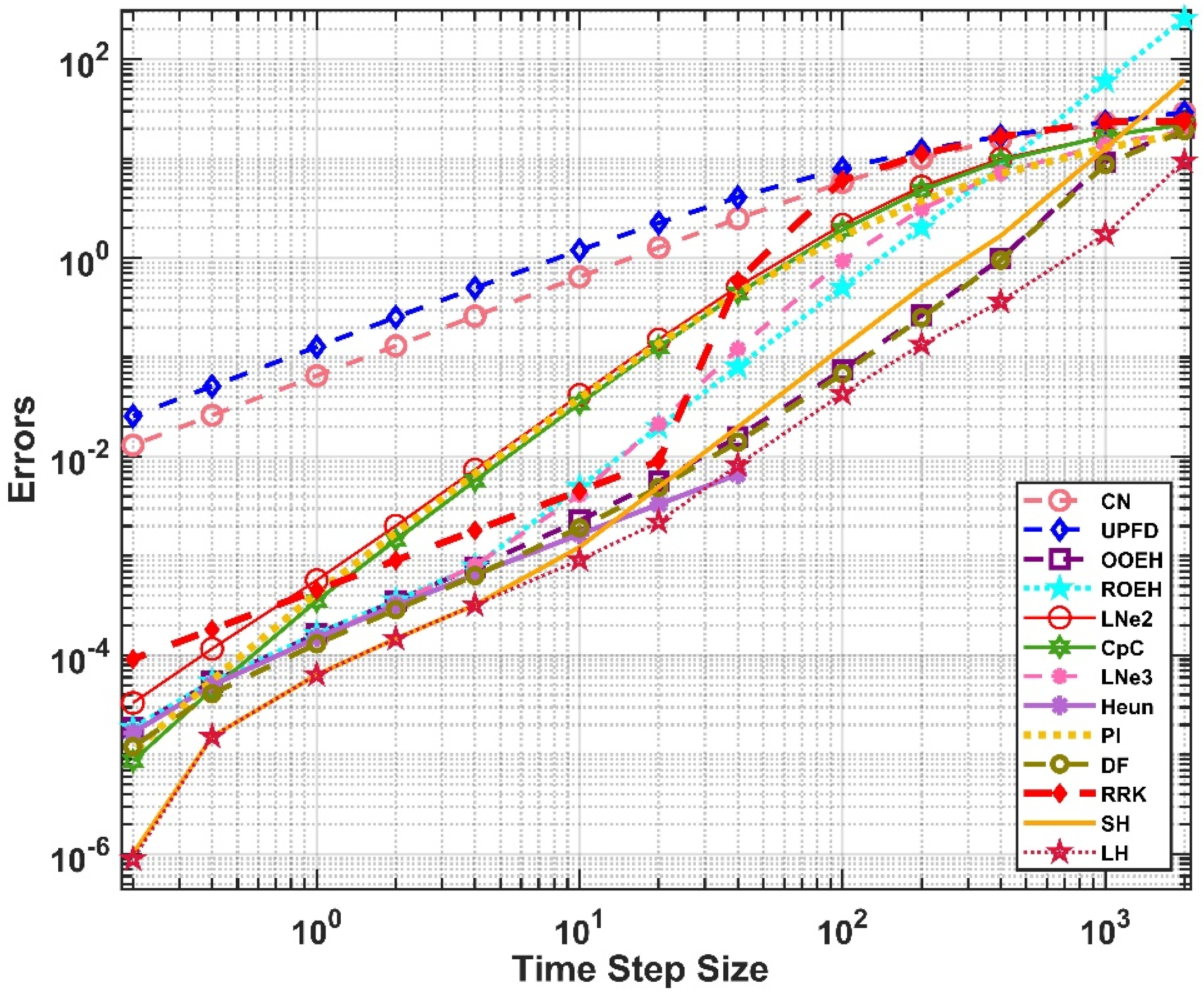
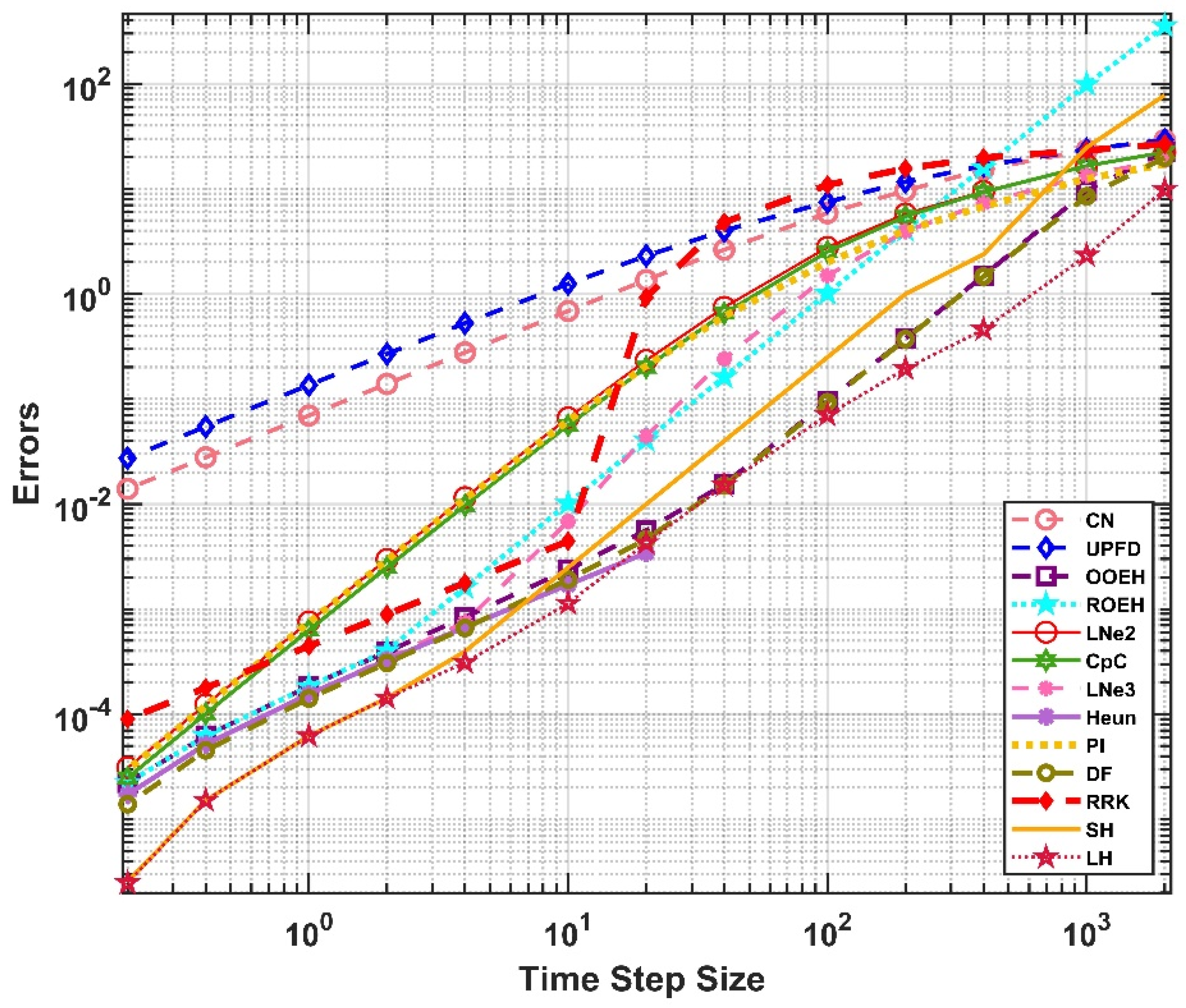
- The CNe and the UPFD are first order, thus not very accurate, all other methods are second order. Nevertheless, the RRK behaves as a first-order method for large and medium time step sizes.
- In the case of uniform (non-stiff) problems, the OOEH method is the most accurate for large and medium time step sizes. However, if stiffness increases, it can produce larger errors for large time step sizes. On the other hand, the LH always produces acceptable errors, and, usually, it is the most accurate for stiff systems.
- Heun’s method is only conditionally stable and was divergent for most of the time step sizes used, while all other methods are unconditionally stable.
- The CNe, the UPFD, the LNe2 and LNe3, and the CpC are positivity preserving for arbitrary time step size, all others are not. However, it implies that for medium and small time step sizes they are the least accurate.
- The hopscotch methods (OOEH, ROEH, SH, and LH) need a special bipartite grid. However, they do not require storing another copy of the array for the temperature, even temporarily, so they have minimal memory requirements. Other methods require the storage at least one extra array with the same number of elements as the array variable for the temperature.
- The level of generalizability of the methods is different. For example, the RRK and Heun’s methods are in principle completely general, so they can handle any modification of the original heat-equation. The UPFD and the pseudo-implicit methods can handle convection and reaction terms quite well, while some other methods have been adapted until now only to the cases of constant source terms and/or Fisher-type reaction terms besides the diffusion term. We note that the LH method has been successfully applied to the Kardar-Parisi-Zhang equation [47] as well.
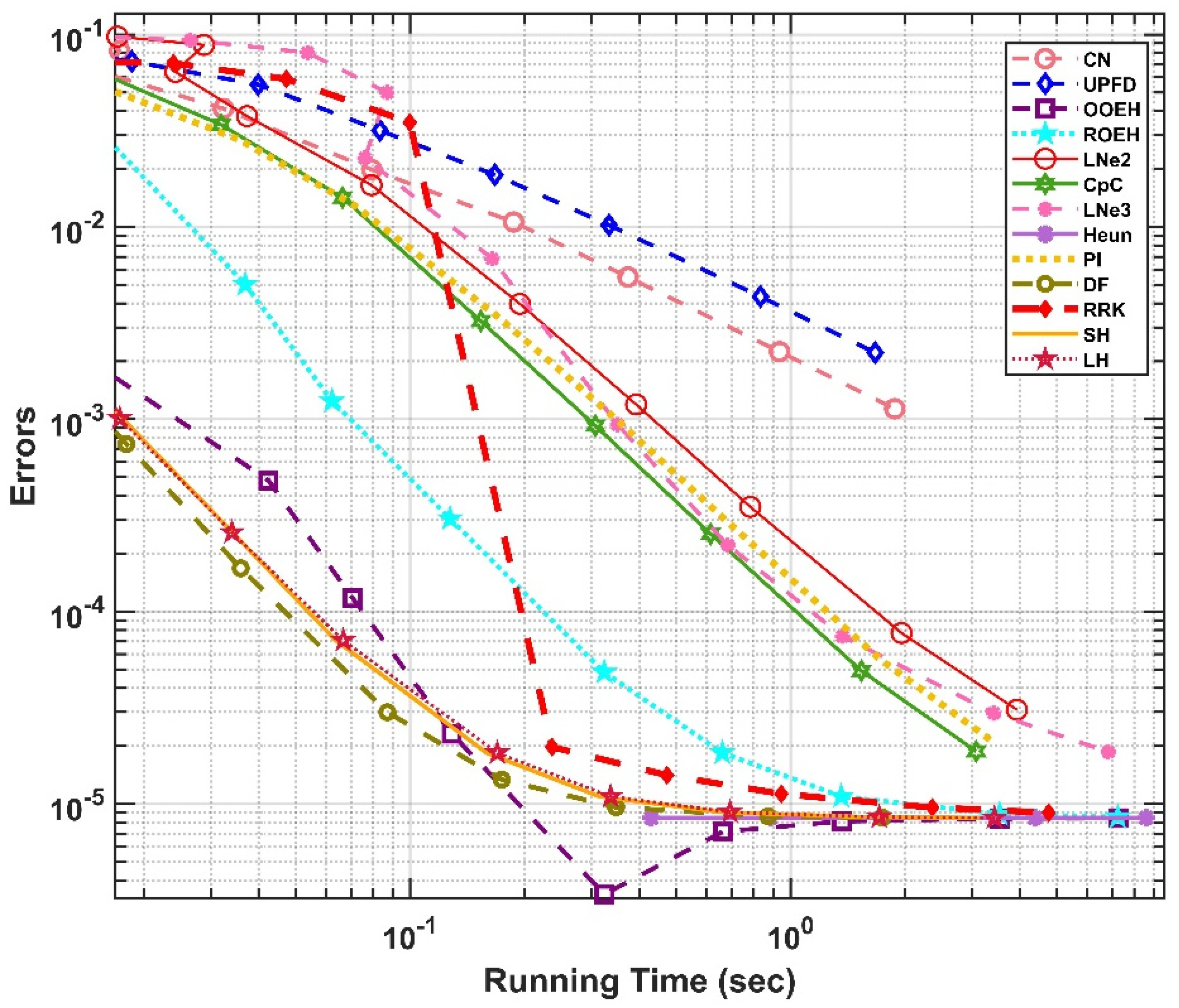
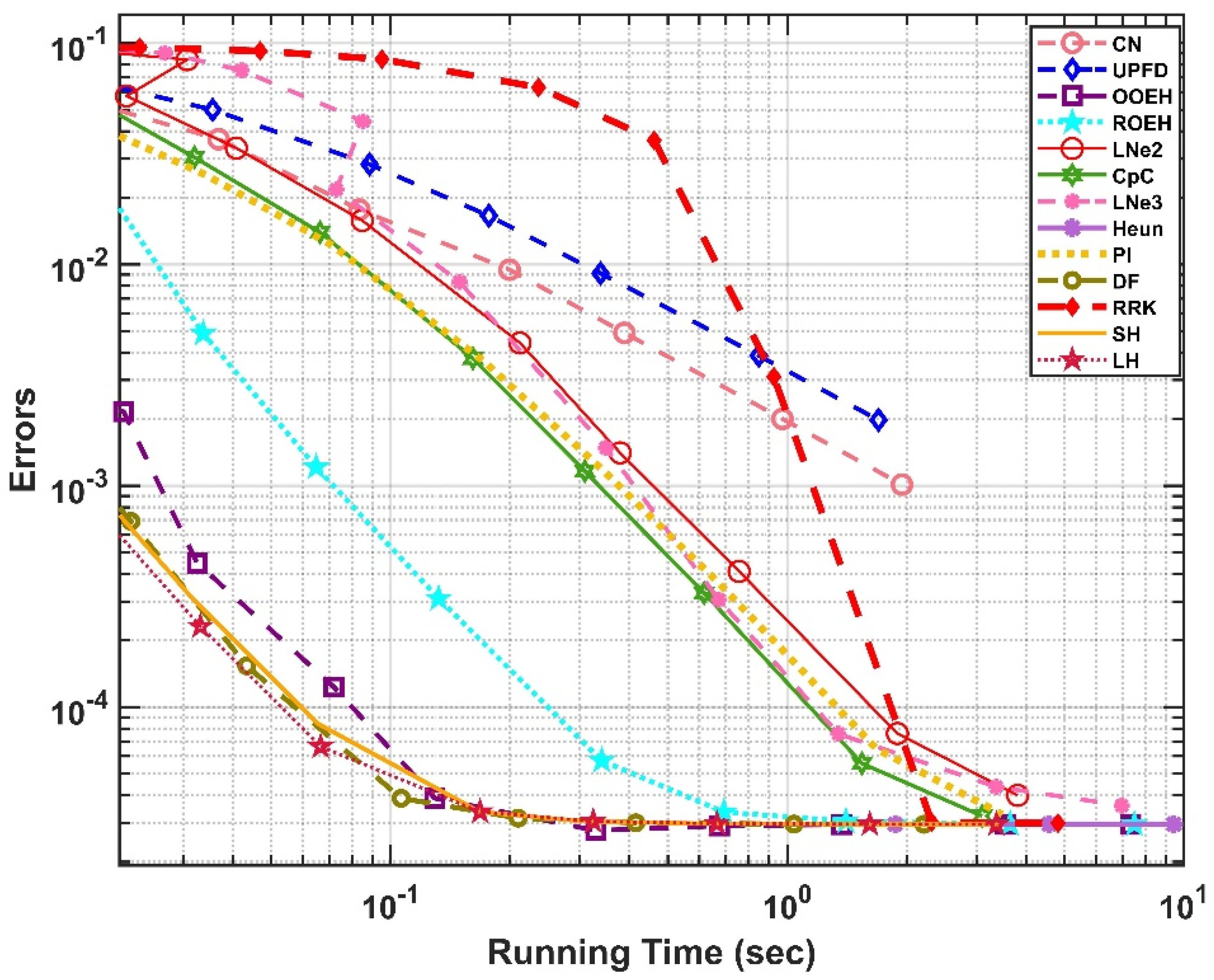
- The CNe, UPFD, OOEH, ROEH, DF, SH, and LH methods require only one calculation of the new temperature values of any cells in any given time step, so they are the fastest. The LNe2, CpC, Heun, PI, and RRK methods require two calculations while the LNe3 needs three calculations per cell per time step, thus it is roughly three times slower than, for example, the CNe method.
- DF is a two-step method; it needs to be started by another method.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Kusuda, T. Fundamentals of building heat transfer. J. Res. Natl. Bur. Stand. 1977, 82, 97. [Google Scholar] [CrossRef] [PubMed]
- Li, T.; Xia, J.; Chin, C.S.; Song, P. Investigation of the Thermal Performance of Lightweight Assembled Exterior Wall Panel (LAEWP) with Stud Connections. Buildings 2022, 12, 473. [Google Scholar] [CrossRef]
- Barna, I.F.; Mátyás, L. General Self-Similar Solutions of Diffusion Equation and Related Constructions. Rom. J. Phys. 2022, 67, 101. [Google Scholar]
- Lienhard, J.H., IV; Lienhard, J.H., V. A Heat Transfer Textbook, 4th ed.; Phlogiston Press: Cambridge, MA, USA, 2017; ISBN 9780971383524. [Google Scholar]
- Savović, S.; Djordjevich, A. Numerical solution of diffusion equation describing the flow of radon through concrete. Appl. Radiat. Isot. 2008, 66, 552–555. Available online: https://www.sciencedirect.com/science/article/pii/S0969804307002874 (accessed on 13 June 2022). [CrossRef]
- Suárez-Carreño, F.; Rosales-Romero, L. Convergency and stability of explicit and implicit schemes in the simulation of the heat equation. Appl. Sci. 2021, 11, 4468. [Google Scholar] [CrossRef]
- Haq, S.; Ali, I. Approximate solution of two-dimensional Sobolev equation using a mixed Lucas and Fibonacci polynomials. Eng. Comput. 2021. Available online: https://link.springer.com/article/10.1007/s00366-021-01327-5 (accessed on 13 June 2022). [CrossRef]
- Lima, S.A.; Kamrujjaman, M.; Islam, M.S. Numerical solution of convection-diffusion-reaction equations by a finite element method with error correlation. AIP Adv. 2021, 11, 085225. [Google Scholar] [CrossRef]
- Ivanovic, M.; Svicevic, M.; Savovic, S. Numerical solution of Stefan problem with variable space grid method based on mixed finite element/ finite difference approach. Int. J. Numer. Methods Heat Fluid Flow 2017, 27, 2682–2695. [Google Scholar] [CrossRef]
- Zhang, J.; Zhao, C. Sharp error estimate of BDF2 scheme with variable time steps for molecular beam expitaxial models without slop selection. J. Math. 2021, 41, 1–19. [Google Scholar]
- Amoah-Mensah, J.; Boateng, F.O.; Bonsu, K. Numerical solution to parabolic PDE using implicit finite difference approach. Math. Theory Model. 2016, 6, 74–84. [Google Scholar]
- Mbroh, N.A.; Munyakazi, J.B. A robust numerical scheme for singularly perturbed parabolic reaction-diffusion problems via the method of lines. Int. J. Comput. Math. 2021, 2021, 1–25. [Google Scholar] [CrossRef]
- Aminikhah, H.; Alavi, J. An efficient B-spline difference method for solving system of nonlinear parabolic PDEs. SeMA J. 2018, 75, 335–348. [Google Scholar] [CrossRef]
- Ali, I.; Haq, S.; Nisar, K.S.; Arifeen, S.U. Numerical study of 1D and 2D advection-diffusion-reaction equations using Lucas and Fibonacci polynomials. Arab. J. Math. 2021, 10, 513–526. [Google Scholar] [CrossRef]
- Singh, M.K.; Rajput, S.; Singh, R.K. Study of 2D contaminant transport with depth varying input source in a groundwater reservoir. Water Sci. Technol. Water Supply 2021, 21, 1464–1480. [Google Scholar] [CrossRef]
- Haq, S.; Hussain, M.; Ghafoor, A. A computational study of variable coefficients fractional advection–diffusion–reaction equations via implicit meshless spectral algorithm. Eng. Comput. 2020, 36, 1243–1263. Available online: https://link.springer.com/article/10.1007/s00366-019-00760-x (accessed on 13 June 2022). [CrossRef]
- Reguly, I.Z.; Mudalige, G.R. Productivity, performance, and portability for computational fluid dynamics applications. Comput. Fluids 2020, 199, 104425. [Google Scholar] [CrossRef]
- Gagliardi, F.; Moreto, M.; Olivieri, M.; Valero, M. The international race towards Exascale in Europe. CCF Trans. High Perform. Comput. 2019, 1, 3–13. [Google Scholar] [CrossRef]
- Appadu, A.R. Performance of UPFD scheme under some different regimes of advection, diffusion and reaction. Int. J. Numer. Methods Heat Fluid Flow 2017, 27, 1412–1429. [Google Scholar] [CrossRef]
- Karahan, H. Unconditional stable explicit finite difference technique for the advection-diffusion equation using spreadsheets. Adv. Eng. Softw. 2007, 38, 80–86. [Google Scholar] [CrossRef]
- Sanjaya, F.; Mungkasi, S. A simple but accurate explicit finite difference method for the advection-diffusion equation. J. Phys. Conf. Ser. 2017, 909, 1–5. [Google Scholar] [CrossRef]
- Pourghanbar, S.; Manafian, J.; Ranjbar, M.; Aliyeva, A.; Gasimov, Y.S. An efficient alternating direction explicit method for solving a nonlinear partial differential Equation. Math. Probl. Eng. 2020, 2020, 1–12. [Google Scholar] [CrossRef]
- Harley, C. Hopscotch method: The numerical solution of the Frank-Kamenetskii partial differential equation. Appl. Math. Comput. 2010, 217, 4065–4075. [Google Scholar] [CrossRef]
- Al-Bayati, A.Y.; Manaa, S.A.; Al-Rozbayani, A.M. Comparison of Finite Difference Solution Methods for Reaction Diffusion System in Two Dimensions. AL-Rafidain J. Comput. Sci. Math. 2011, 8, 21–36. [Google Scholar] [CrossRef][Green Version]
- Nwaigwe, C. An Unconditionally Stable Scheme for Two-Dimensional Convection-Diffusion-Reaction Equations. 2022. Available online: https://www.researchgate.net/publication/357606287_An_Unconditionally_Stable_Scheme_for_Two-Dimensional_Convection-Diffusion-Reaction_Equations (accessed on 13 June 2022).
- Savović, S.; Drljača, B.; Djordjevich, A. A comparative study of two different finite difference methods for solving advection–diffusion reaction equation for modeling exponential traveling wave in heat and mass transfer processes. Ric. Mat. 2021, 70, 2. [Google Scholar] [CrossRef]
- Kovács, E.; Gilicz, A. New stable method to solve heat conduction problems in extremely large systems. Des. Mach. Struct. 2018, 8, 30–38. [Google Scholar]
- Kovács, E. New Stable, Explicit, First Order Method to Solve the Heat Conduction Equation. J. Comput. Appl. Mech. 2020, 15, 3–13. Available online: http://www.mech.uni-miskolc.hu/jcam/author_card.php?author_id=375 (accessed on 13 June 2022). [CrossRef]
- Issa, O. New explicit algorithm based on the asymmetric hopscotch structure to solve the heat conduction equation. Multidiszcip. Tudományok 2021, 11, 233–244. [Google Scholar]
- Saleh, M.; Nagy, Á.; Kovács, E. Part 1: Construction and investigation of new numerical algorithms for the heat equation. Multidiszcip. Tudományok 2020, 10, 323–338. [Google Scholar] [CrossRef]
- Saleh, M.; Nagy, Á.; Kovács, E. Part 2: Construction and investigation of new numerical algorithms for the heat equation. Multidiszcip. Tudományok 2020, 10, 339–348. [Google Scholar] [CrossRef]
- Saleh, M.; Nagy, Á.; Kovács, E. Part 3: Construction and investigation of new numerical algorithms for the heat equation. Multidiszcip. Tudományok 2020, 10, 349–360. [Google Scholar] [CrossRef]
- Nagy, Á.; Saleh, M.; Omle, I.; Kareem, H.; Kovács, E. New stable, explicit, shifted-hopscotch algorithms for the heat equation. Math. Comput. Appl. 2021, 26, 61. Available online: https://www.mdpi.com/2297-8747/26/3/61/htm (accessed on 13 June 2022). [CrossRef]
- Nagy, Á.; Omle, I.; Kareem, H.; Kovács, E.; Barna, I.F.; Bognar, G. Stable, Explicit, Leapfrog-Hopscotch Algorithms for the Diffusion Equation. Computation 2021, 9, 92. [Google Scholar] [CrossRef]
- Kovács, E.; Nagy, Á.; Saleh, M. A set of new stable, explicit, second order schemes for the non-stationary heat conduction equation. Mathematics 2021, 9, 2284. Available online: https://www.mdpi.com/2227-7390/9/18/2284 (accessed on 3 November 2021). [CrossRef]
- Jalghaf, H.K.; Kovács, E.; Majár, J.; Nagy, Á.; Askar, A.H. Explicit stable finite difference methods for diffusion-reaction type equations. Mathematics 2021, 9, 3308. [Google Scholar] [CrossRef]
- Munka, M.; Pápay, J. 4D Numerical Modeling of Petroleum Reservoir Recovery; Akadémiai Kiadó: Budapest, Hungary, 2001; ISBN 9630578433. [Google Scholar]
- Kovács, E. A class of new stable, explicit methods to solve the non-stationary heat equation. Numer. Methods Partial Differ. Equ. 2020, 37, 2469–2489. [Google Scholar] [CrossRef]
- Holmes, M.H. Introduction to Numerical Methods in Differential Equations; Springer: New York, NY, USA, 2007; ISBN 9780387308913. [Google Scholar]
- Gourlay, A.R.; McGuire, G.R. General Hopscotch Algorithm for the Numerical Solution of Partial Differential Equations. IMA J. Appl. Math. 1971, 7, 216–227. [Google Scholar] [CrossRef]
- Heun’s Method—Wikipedia. Available online: https://en.wikipedia.org/wiki/Heun%27s_method (accessed on 30 July 2021).
- Hirsch, C. Numerical Computation of Internal and External Flows, Volume 1: Fundamentals of Numerical Discretization; Wiley: Hoboken, NJ, USA, 1988. [Google Scholar]
- Sottas, G. Rational Runge-Kutta methods are not suitable for stiff systems of ODEs. J. Comput. Appl. Math. 1984, 10, 169–174. [Google Scholar] [CrossRef][Green Version]
- Kovács, E.; Nagy, Á.; Saleh, M. A New Stable, Explicit, Third-Order Method for Diffusion-Type Problems. Adv. Theory Simul. 2022, 5, 2100600. [Google Scholar] [CrossRef]
- Iserles, A. A First Course in the Numerical Analysis of Differential Equations; Cambridge University Press: Cambridge, UK, 2009; ISBN 9788490225370. [Google Scholar]
- Bastani, M.; Salkuyeh, D.K. A highly accurate method to solve Fisher’s equation. Pramana-J. Phys. 2012, 78, 335–346. [Google Scholar] [CrossRef]
- Sayfidinov, O.; Bognár, G.; Kovács, E. Solution of the 1D KPZ Equation by Explicit Methods. Symmetry 2022, 14, 699. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Brick | 1600 | 0.73 | 800 |
| Glass wool | 200 | 0.03 | 800 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kareem Jalghaf, H.; Omle, I.; Kovács, E. A Comparative Study of Explicit and Stable Time Integration Schemes for Heat Conduction in an Insulated Wall. Buildings 2022, 12, 824. https://doi.org/10.3390/buildings12060824
Kareem Jalghaf H, Omle I, Kovács E. A Comparative Study of Explicit and Stable Time Integration Schemes for Heat Conduction in an Insulated Wall. Buildings. 2022; 12(6):824. https://doi.org/10.3390/buildings12060824
Chicago/Turabian StyleKareem Jalghaf, Humam, Issa Omle, and Endre Kovács. 2022. "A Comparative Study of Explicit and Stable Time Integration Schemes for Heat Conduction in an Insulated Wall" Buildings 12, no. 6: 824. https://doi.org/10.3390/buildings12060824
APA StyleKareem Jalghaf, H., Omle, I., & Kovács, E. (2022). A Comparative Study of Explicit and Stable Time Integration Schemes for Heat Conduction in an Insulated Wall. Buildings, 12(6), 824. https://doi.org/10.3390/buildings12060824