
Peak and Cumulative Response of Reinforced Concrete Frames with Steel Damper Columns under Seismic Sequences


Abstract
:1. Introduction
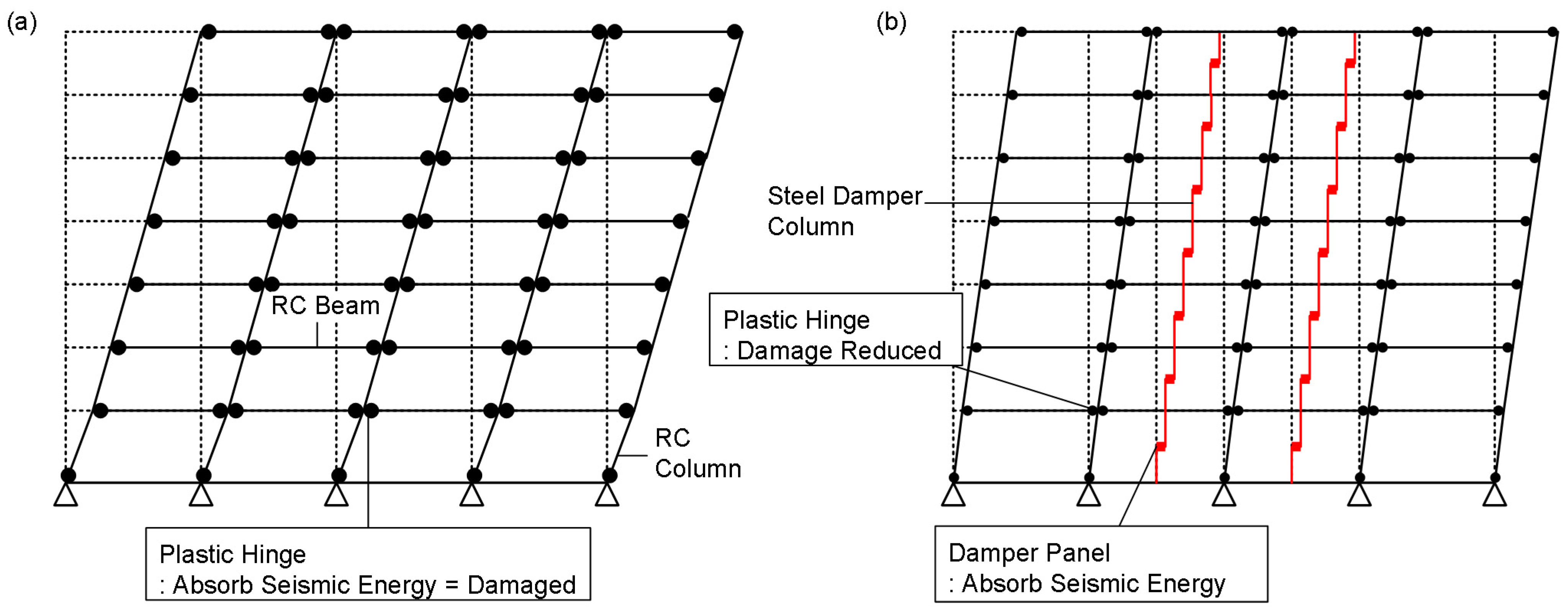
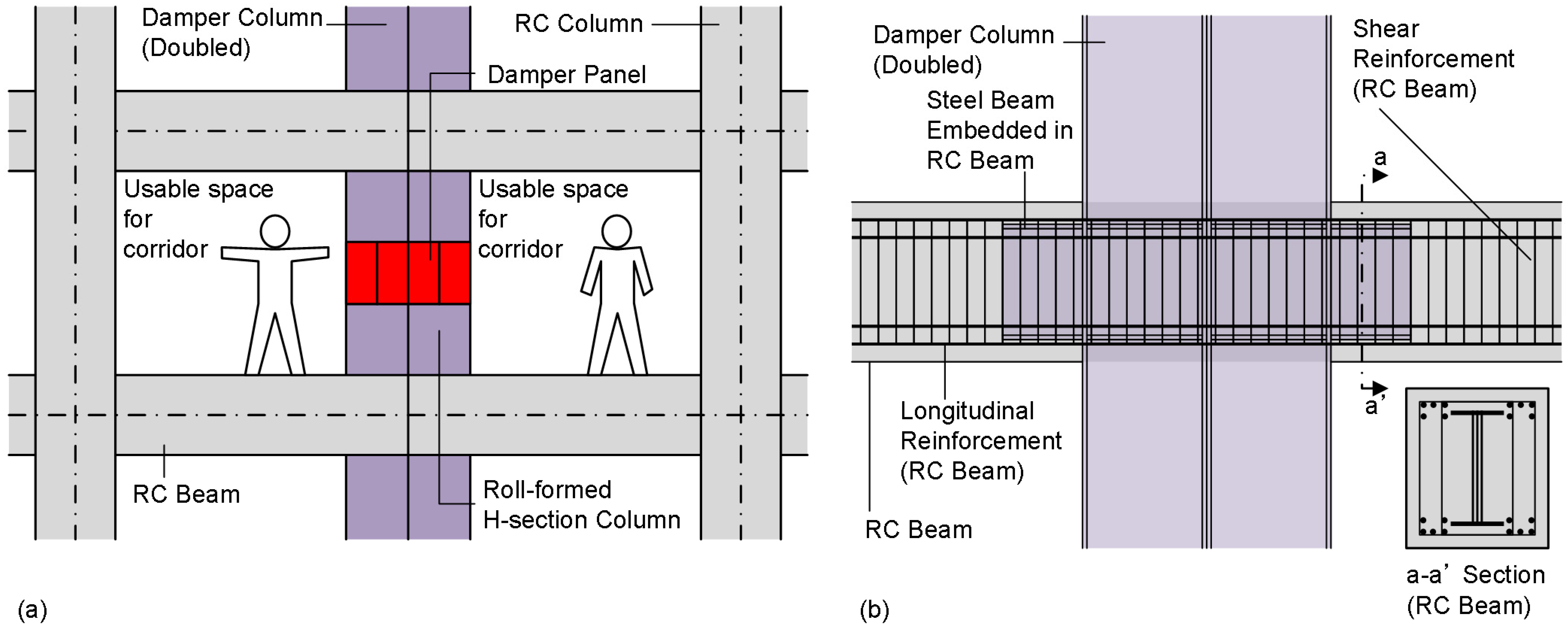
1.1. Background
1.2. Brief Review of Related Studies
1.2.1. Studies on the Responses of Structures under Seismic Sequences
1.2.2. Studies on the Seismic Energy Input
1.3. Objectives
- What are the differences in the peak and cumulative responses of RC MRFs with and without steel damper columns between a single acceleration and sequential accelerations?
- Is the steel damper column effective in reducing the peak and cumulative responses of an RC MRF in the event of a seismic sequence?
- In the prediction of the peak response of the RC MRF with steel damper columns based on the momentary energy input, the relation between the hysteretic dissipated energy during a half cycle of the structural response and the peak displacement must be properly modeled. How can this relationship be modeled from the results of pushover analysis?
2. Building and Ground Motion Data
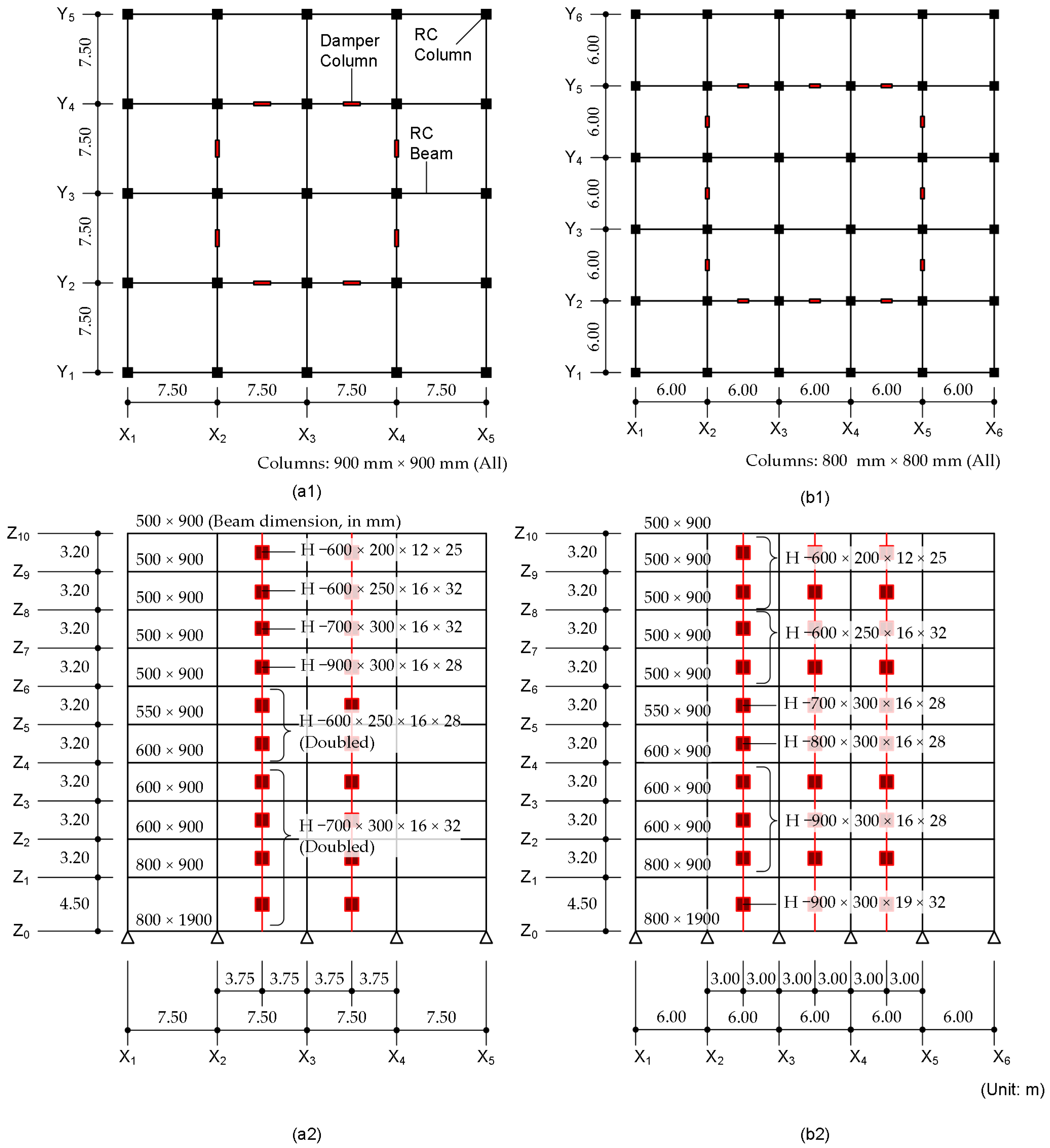
2.1. Building Data
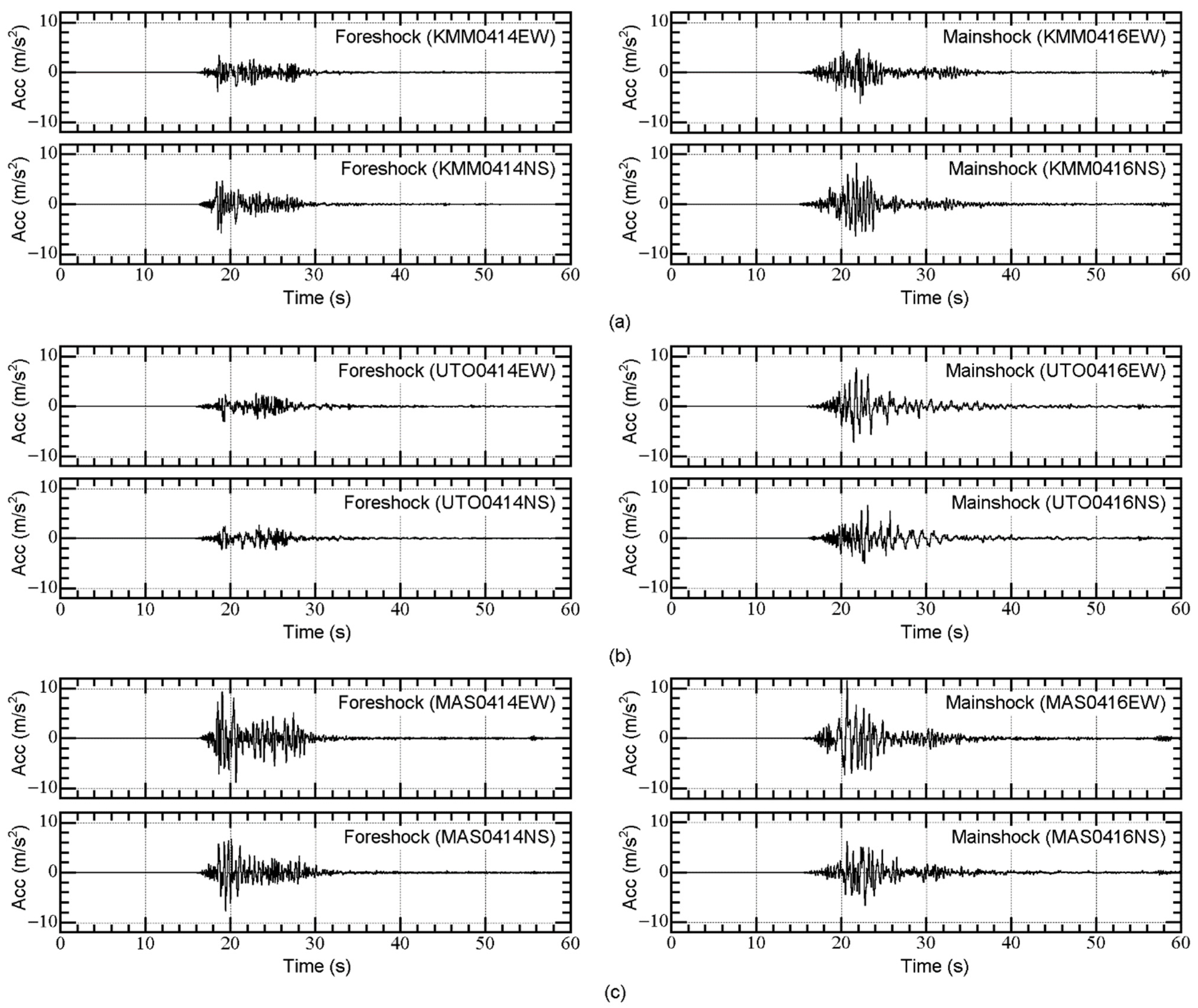
2.2. Ground Motion Data
3. Analysis Results
3.1. Peak Response
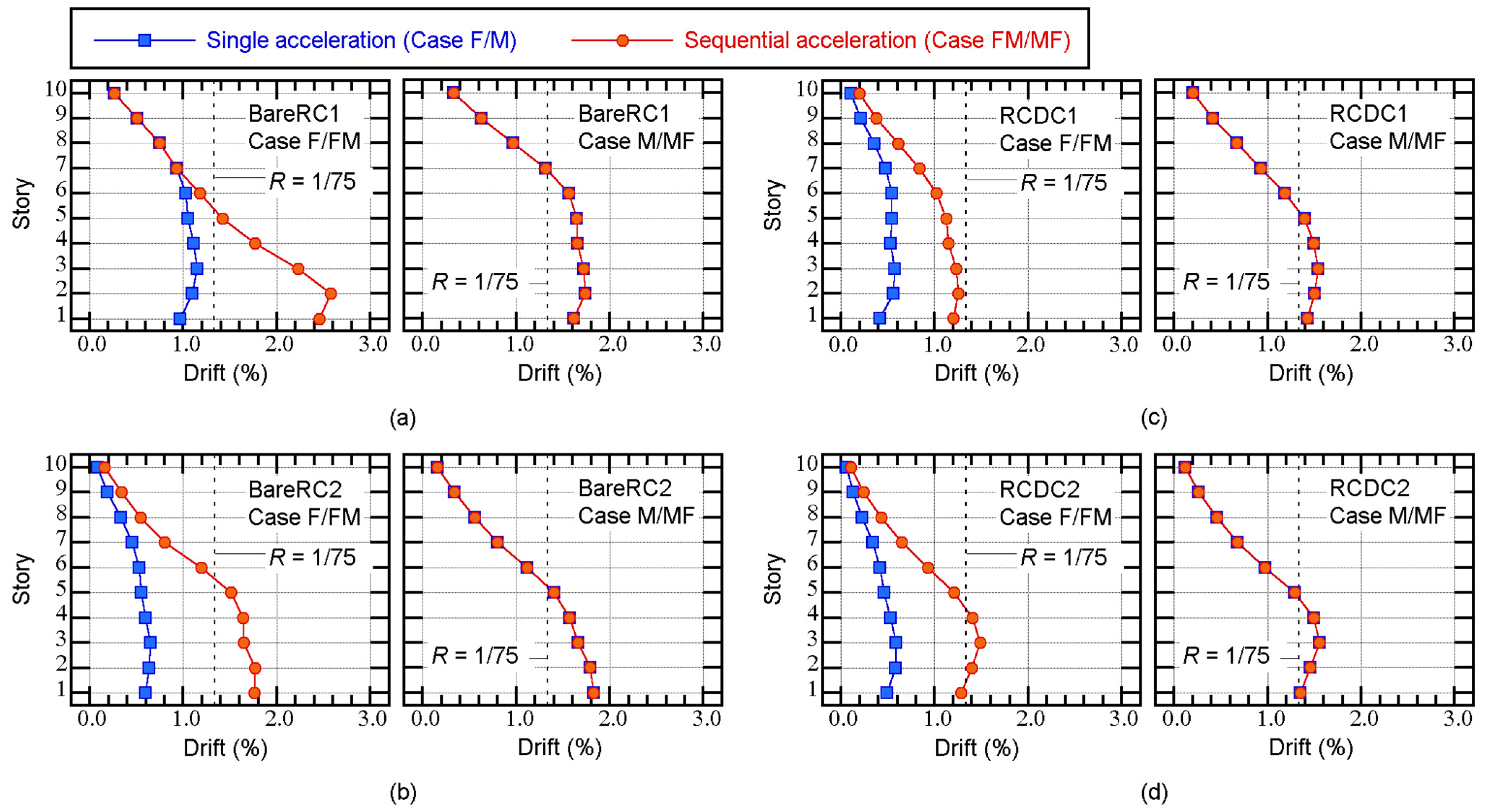
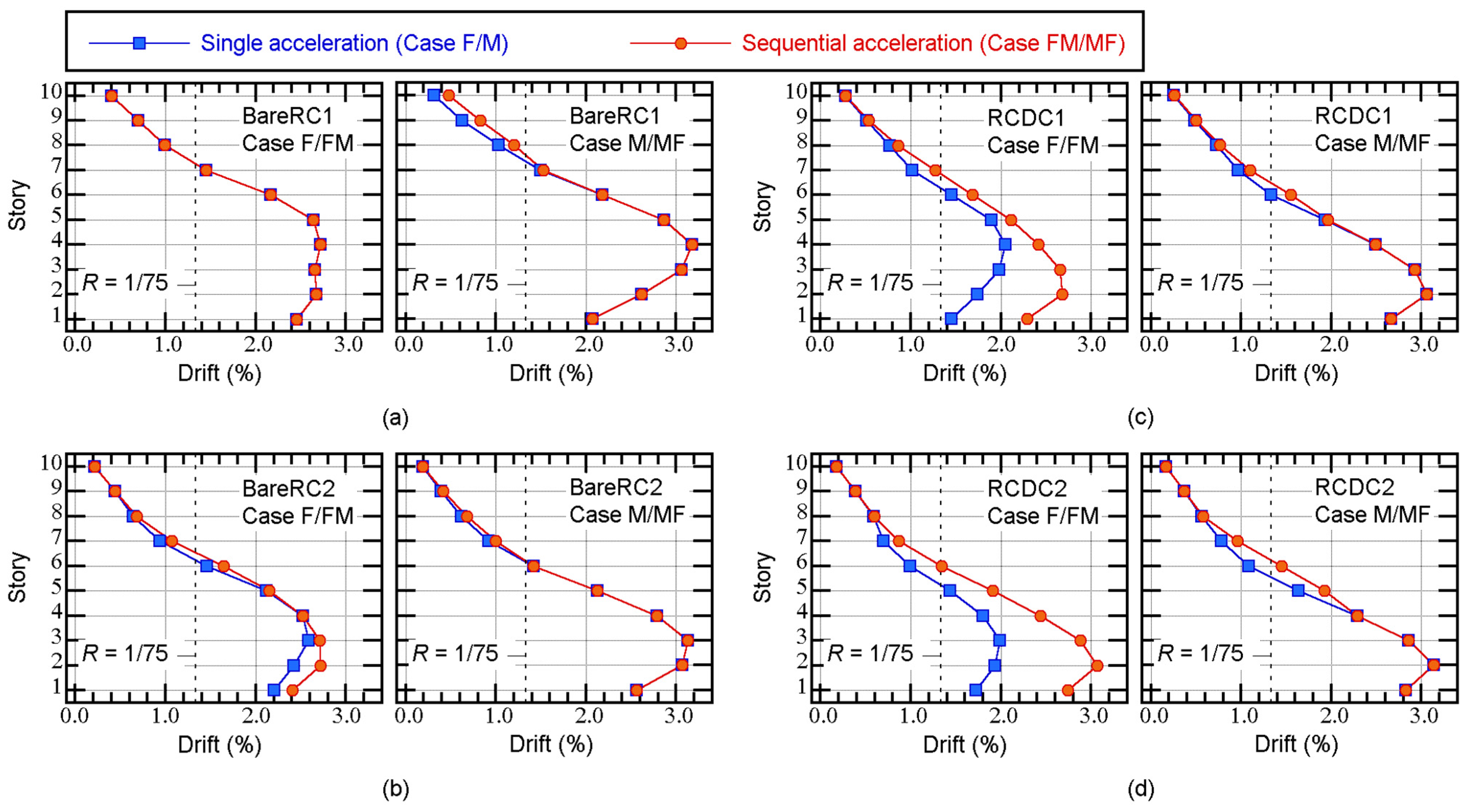
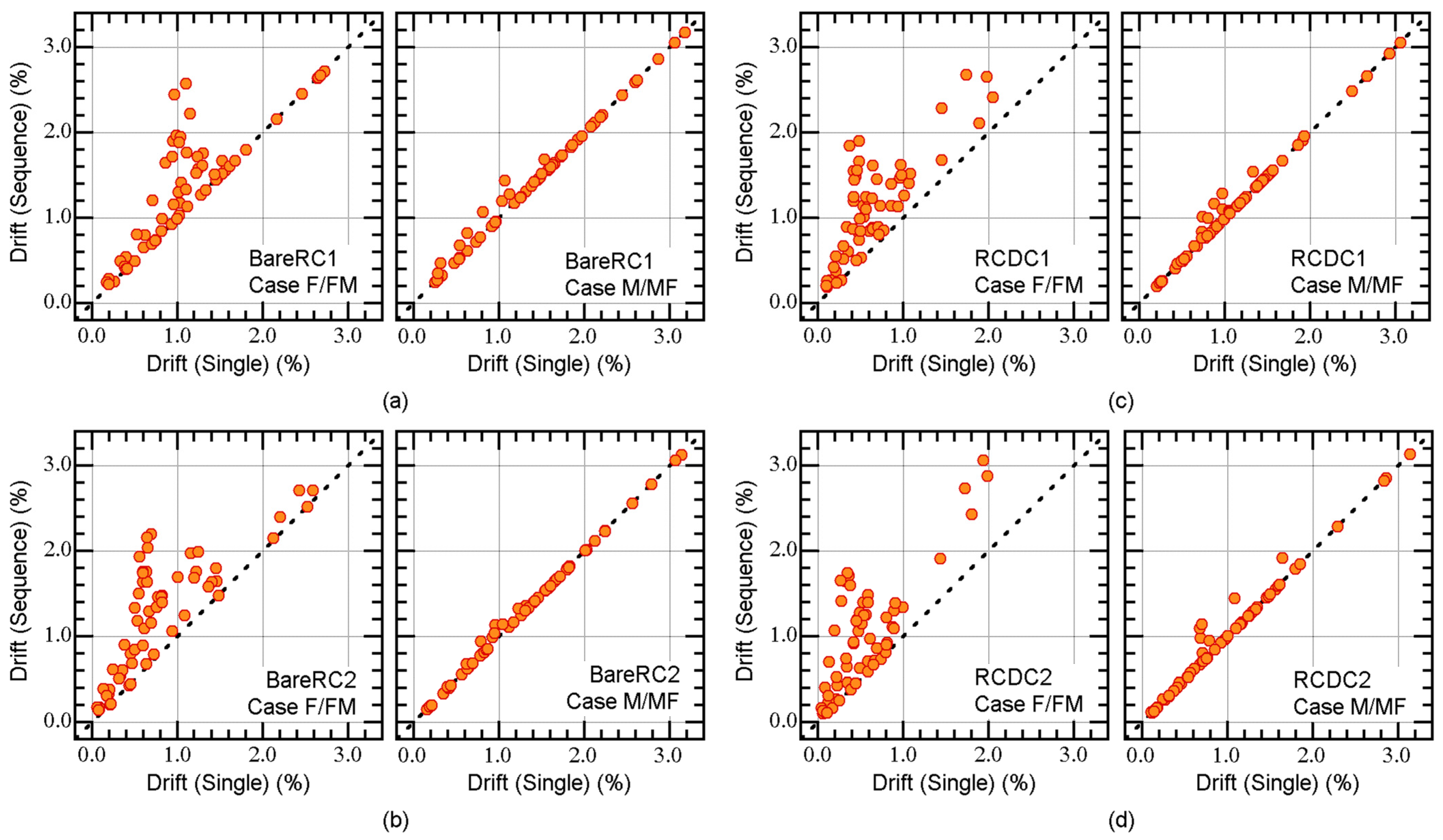
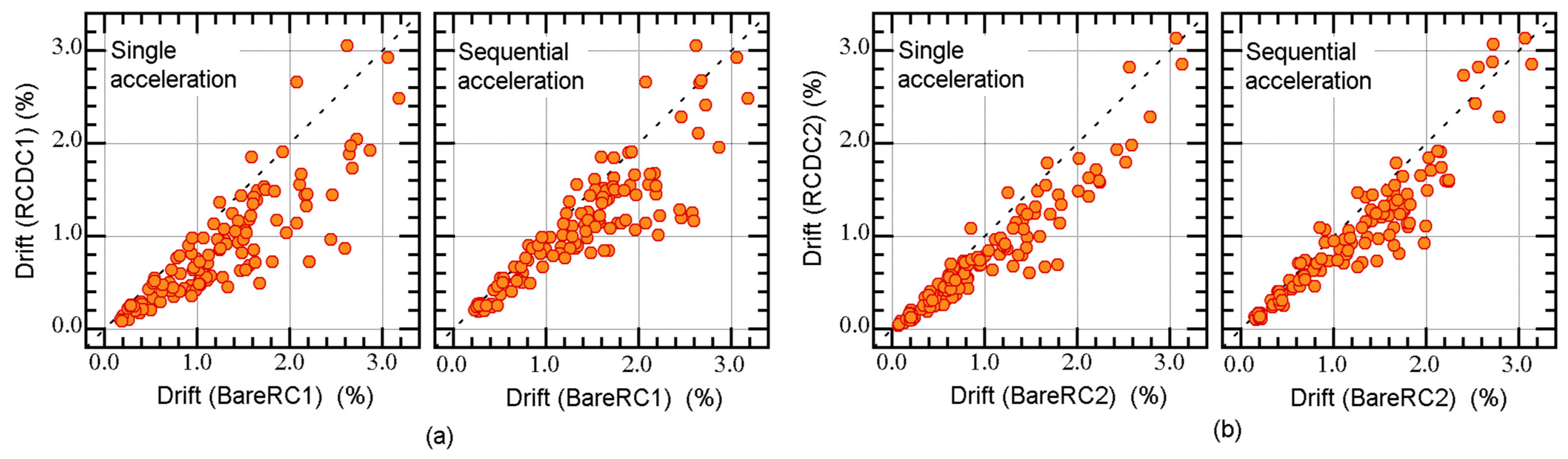
3.1.1. Relative Displacement and Story Drift
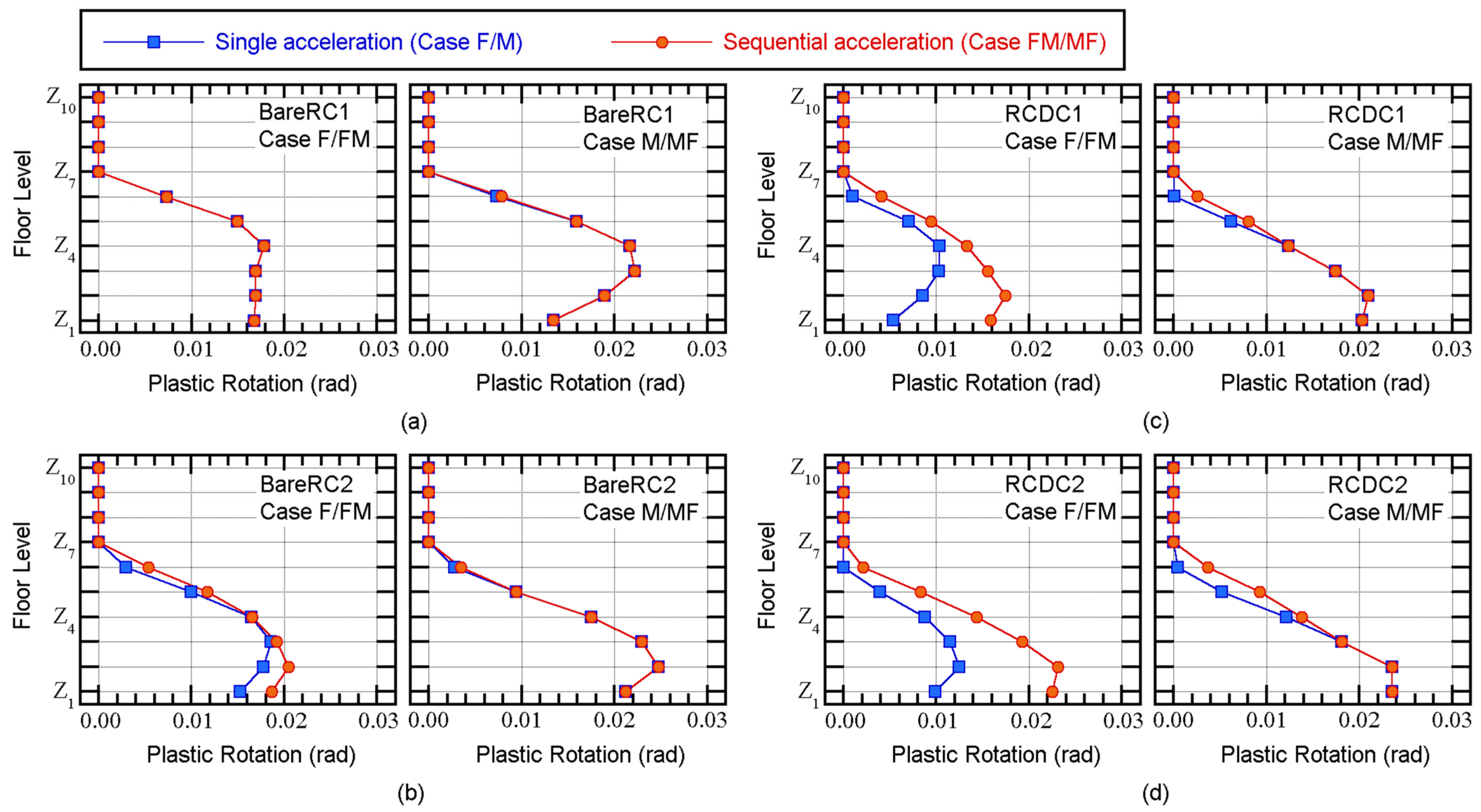
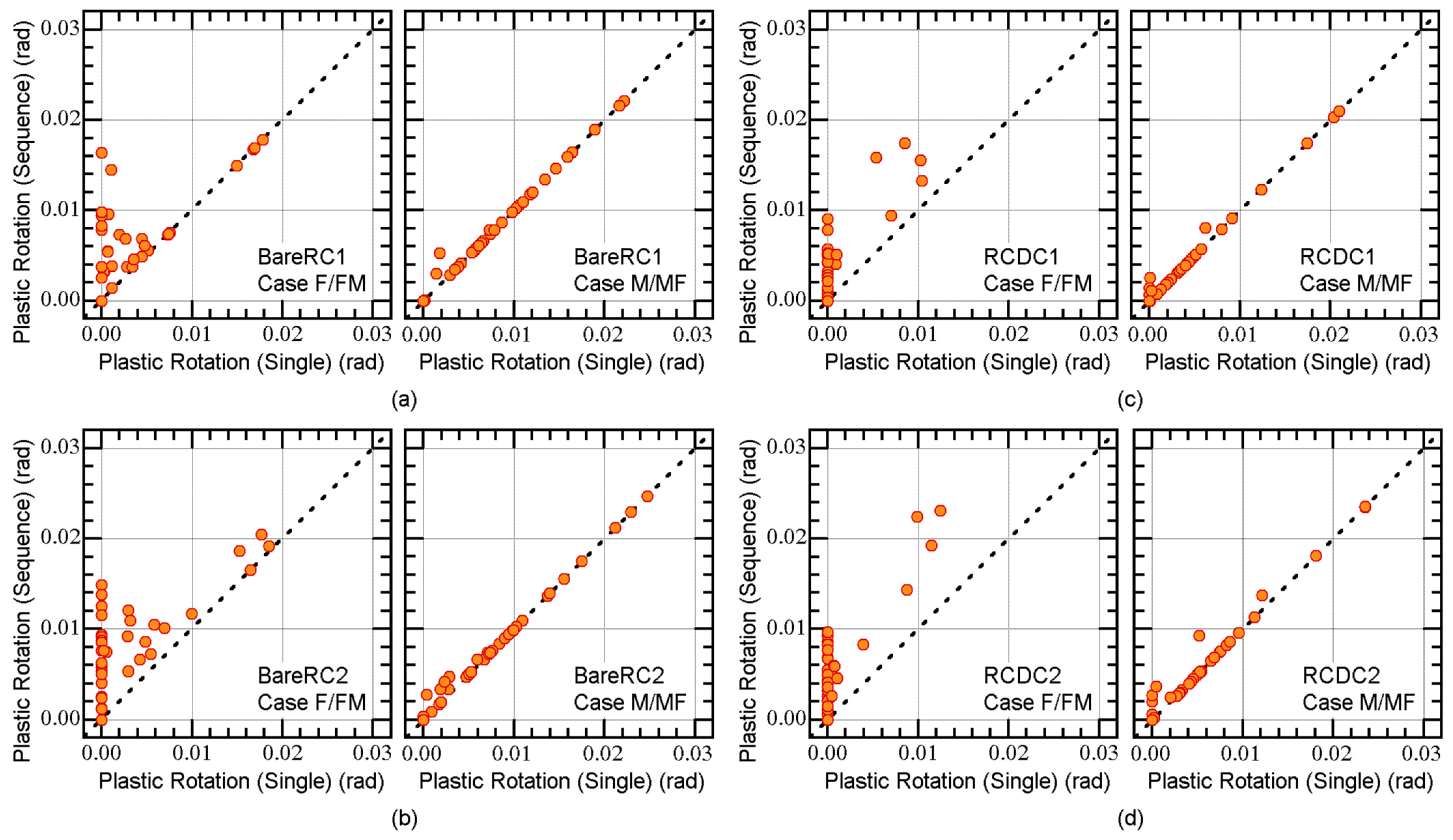
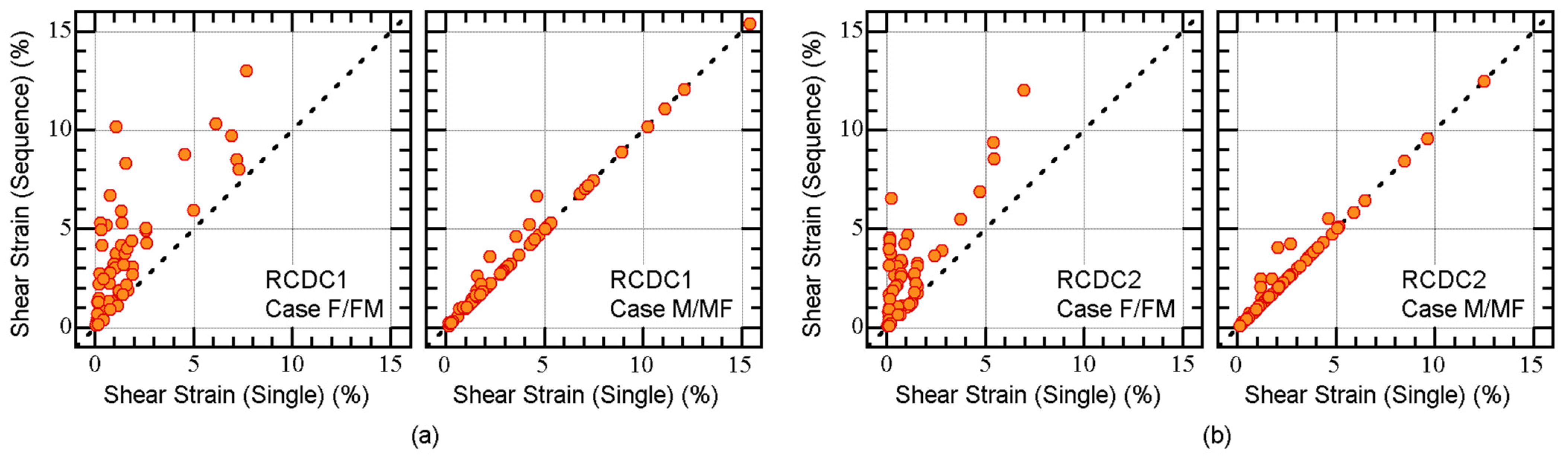
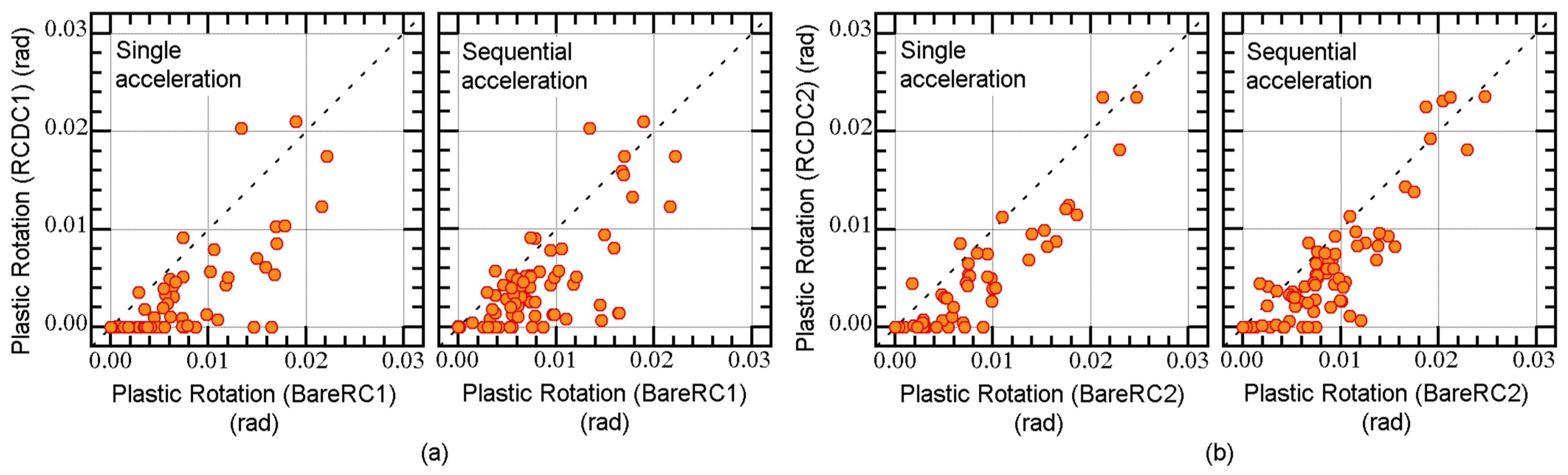
3.1.2. Member Deformation
3.2. Cumulative Response
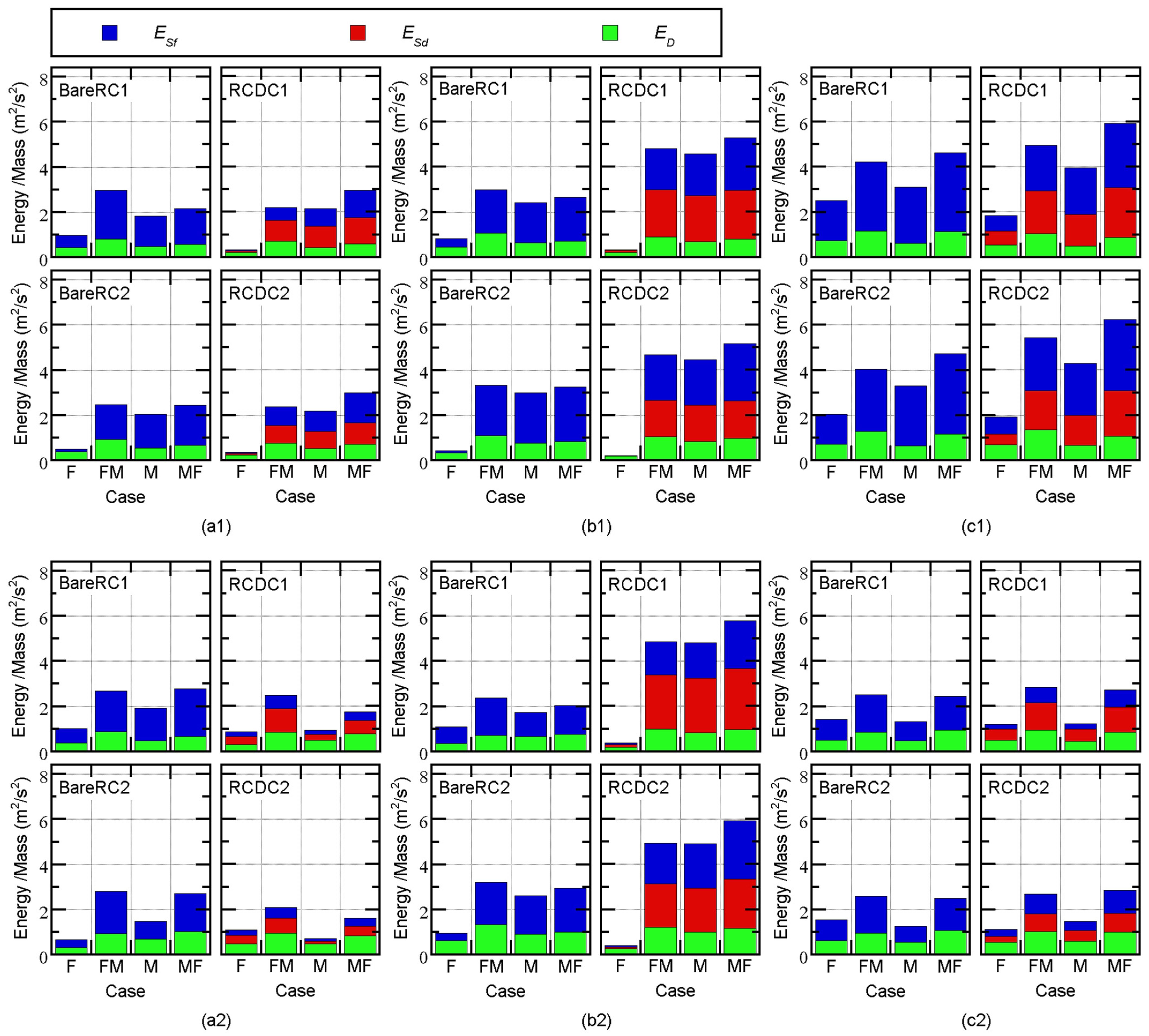
3.2.1. Cumulative Response of the Overall Building
- The total input energy of the sequential accelerations is greater than that of the single acceleration: e.g., in Case FM is greater than that in Case F.
- In most cases for BareRC1 and BareRC2, is mostly absorbed as cumulative strain energy of the RC MRF, .
- In most cases for RCDC1 and RCDC2, the total input energy is greater than that of BareRC1 and BareRC2. However, a large proportion of is absorbed as the cumulative strain energy of the steel damper columns, . The relative amounts of and depend on the model and analysis case.
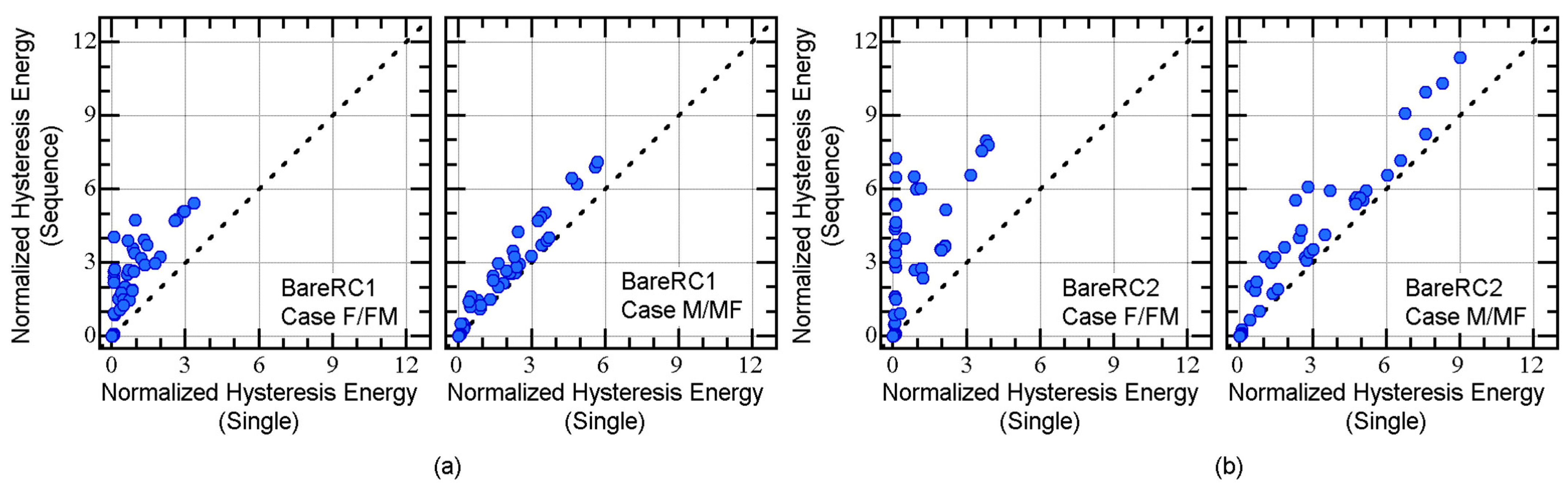
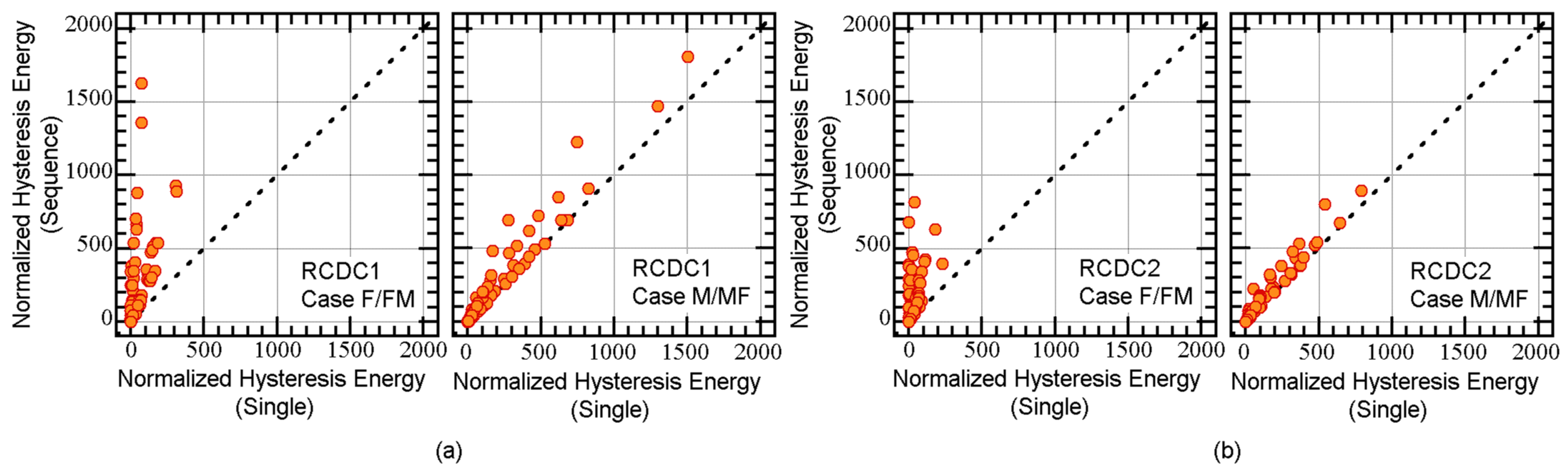
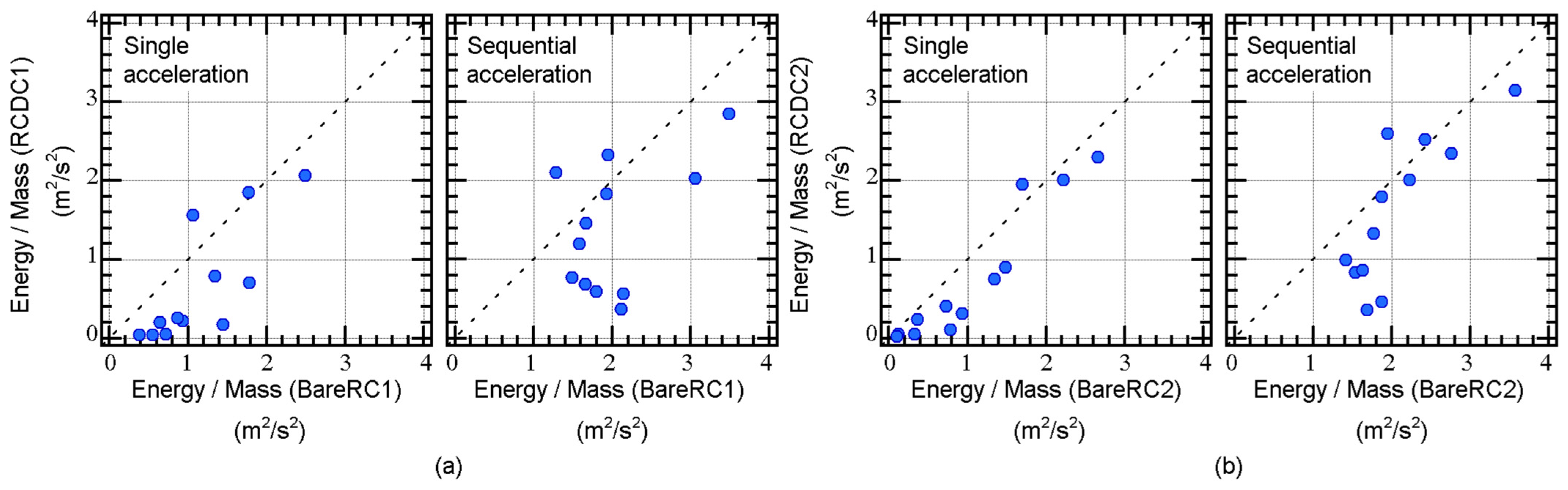
3.2.2. Cumulative Strain Energy of a Member
3.3. Effectiveness of Steel Damper Columns in Reducing the Seismic Response
3.4. Summary of Results
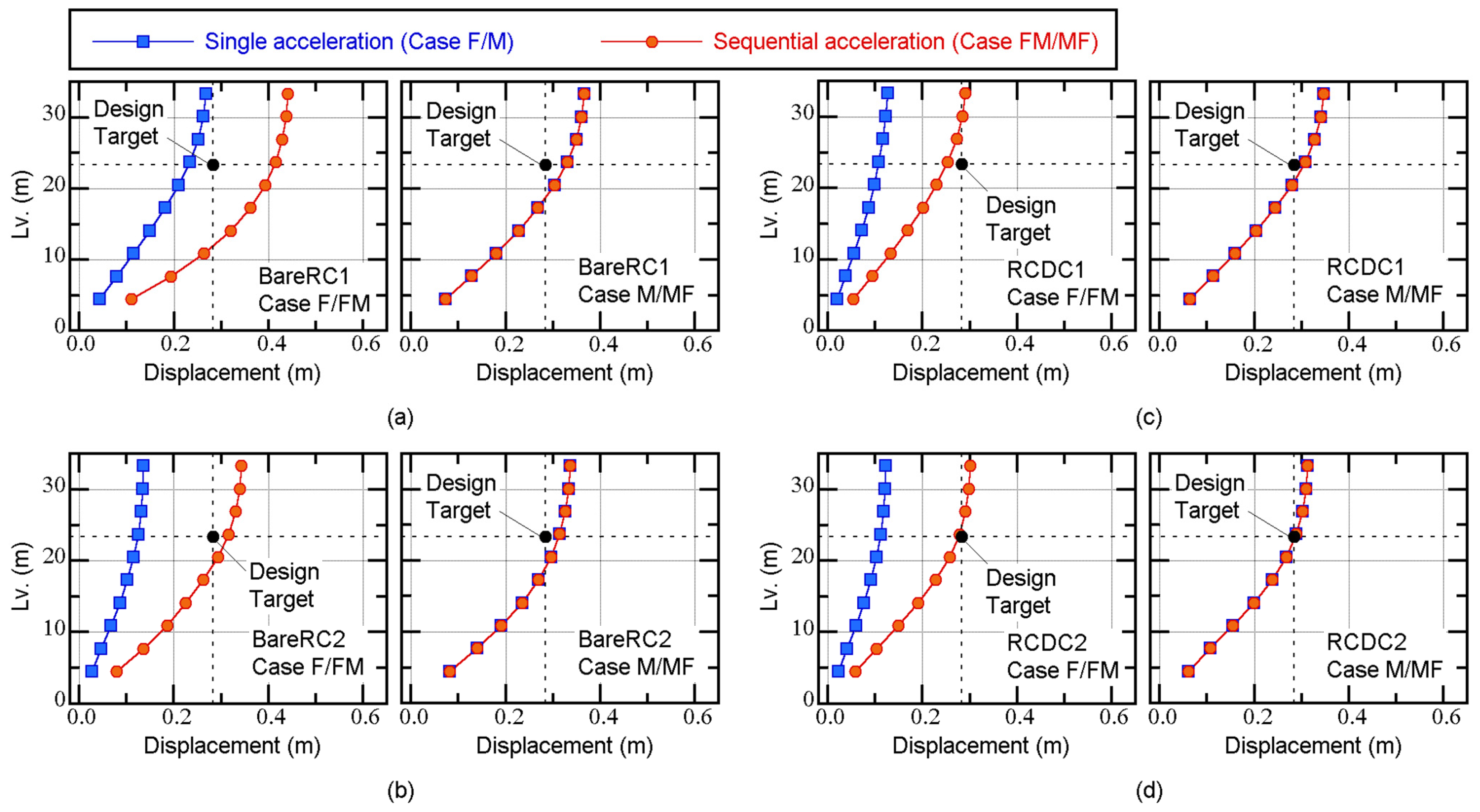
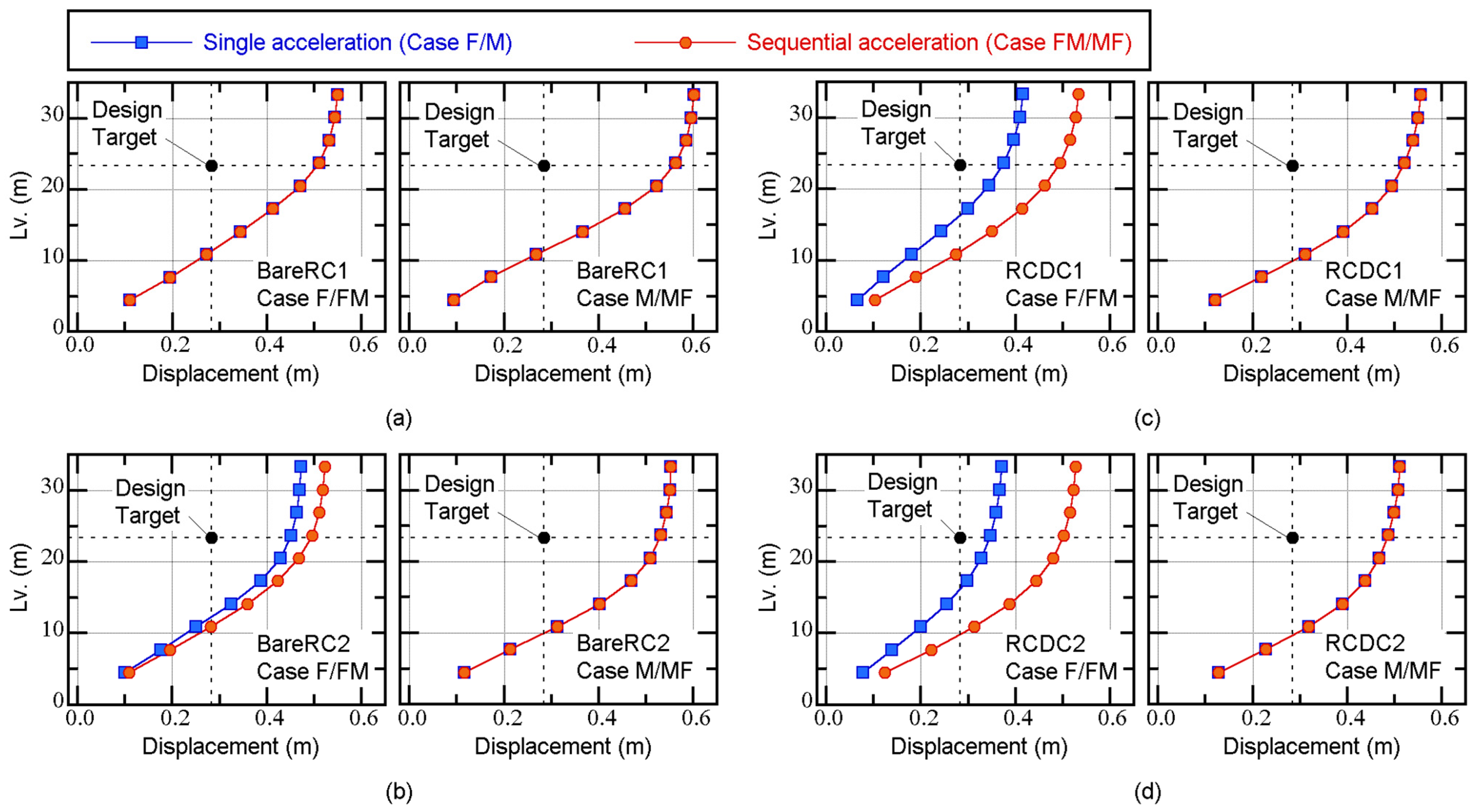
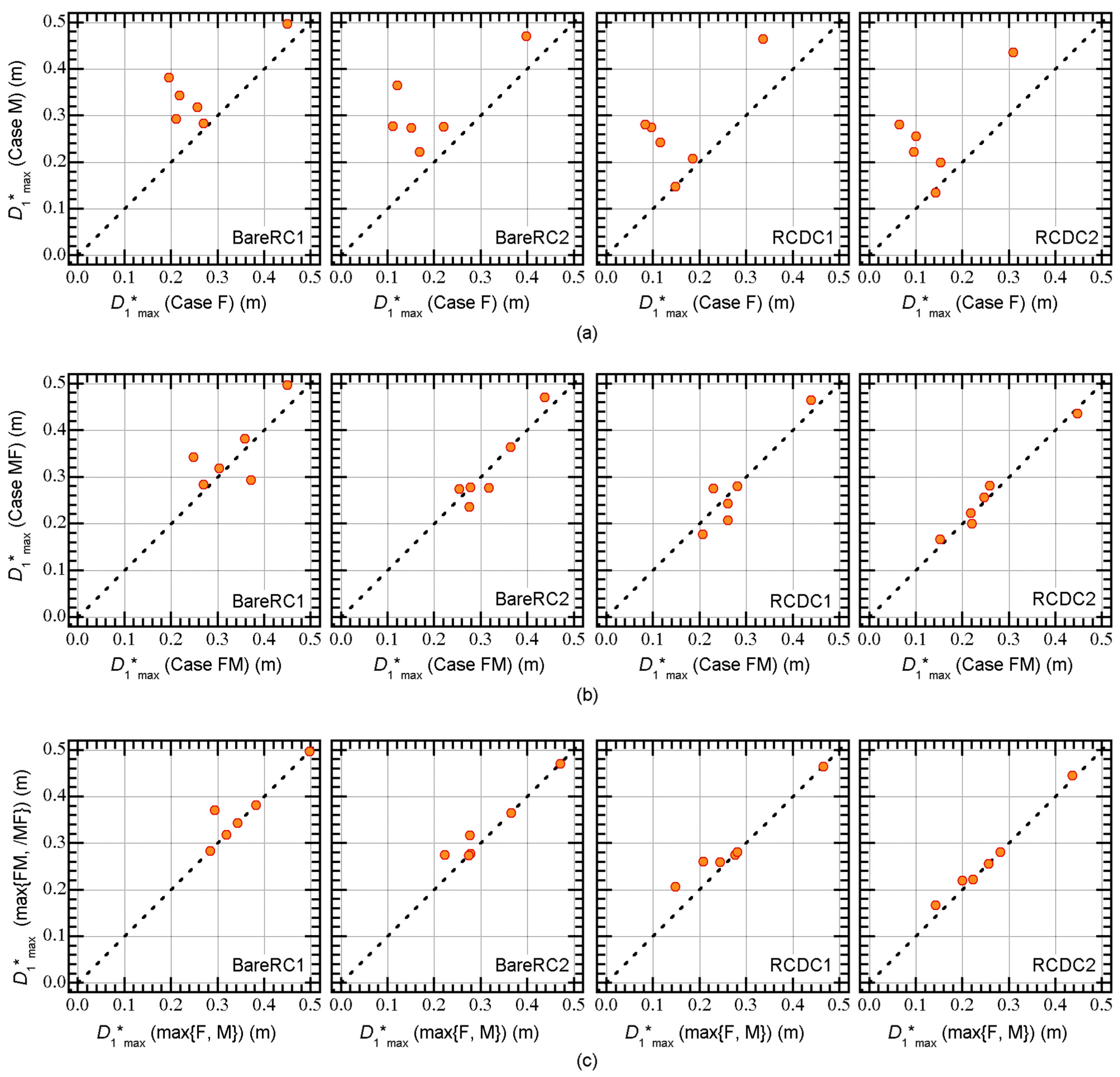
- The peak responses of all models under sequential accelerations studied here are governed by the mainshock. The peak responses of all models in Case FM are notably greater than those in Case F. In contrast, the difference in the peak response between Case MF and Case M is limited.
- The effect of the sequential accelerations on the cumulative strain energy is not negligible. Unlike the peak response, the cumulative strain energy accumulates in the event of sequential accelerations.
- The steel damper column is effective in reducing the peak and cumulative responses of RC members, irrespective of whether a single acceleration or sequential accelerations is considered as the seismic input.
4. Evaluation of the First Modal Response
4.1. Method of Calculating the First Modal Response from the Results of Time-History Analysis
4.1.1. Step 1: Determination of the “Peak Response Point”
4.1.2. Step 2: Determination of the First Mode Vector at the Peak Response Point
4.1.3. Step 3: Calculation of the Equivalent Displacement and Acceleration of the First Modal Response
4.1.4. Step 4: Calculation of the Momentary Input Energy and Hysteretic Dissipated Energy in a Half Cycle of the First Modal Response
4.2. Calculation Results
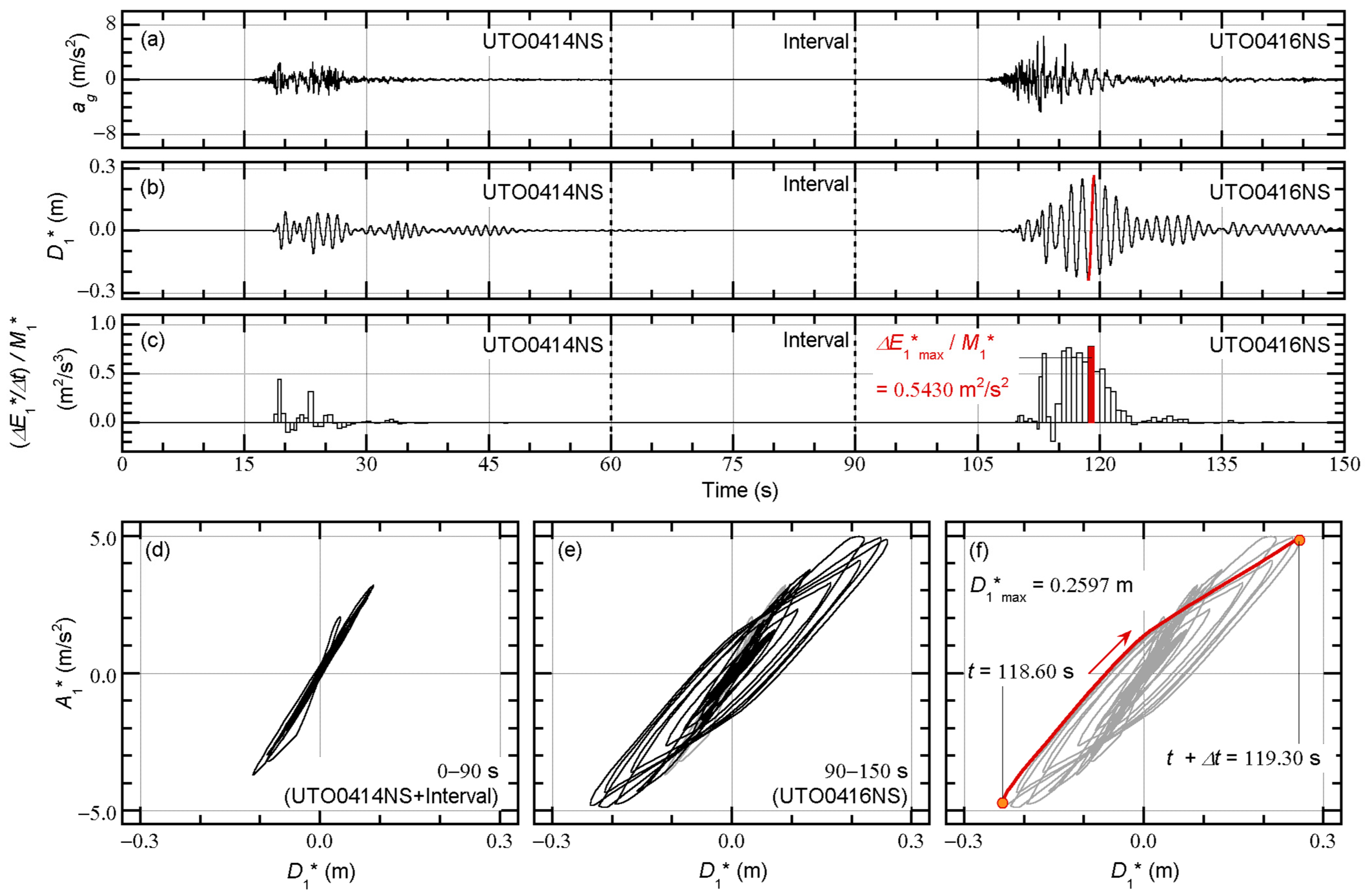
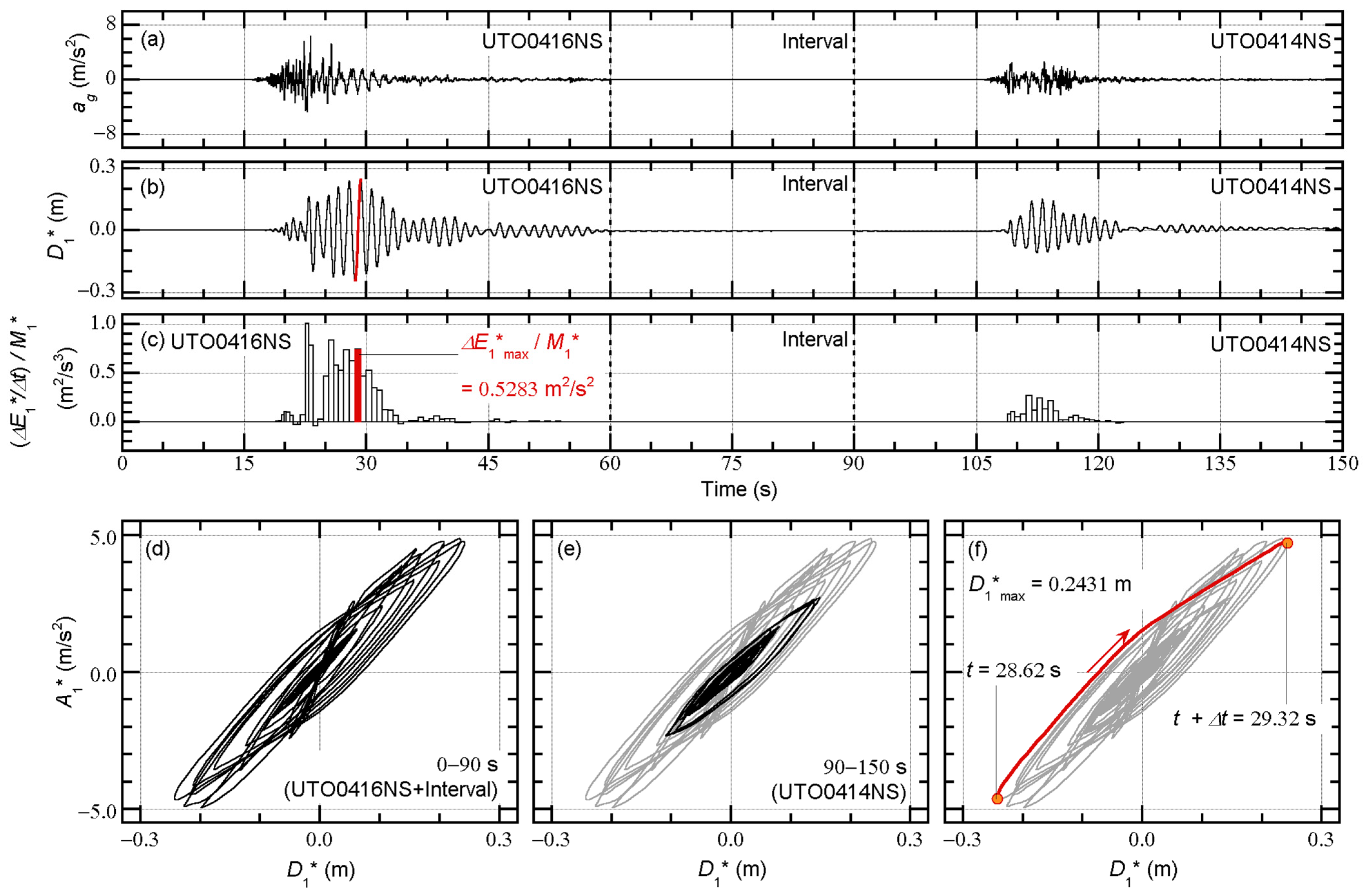
- The values of the maximum momentary input energy per unit mass () are similar in the two cases. = 0.5430 m2/s2 in Case FM, whereas = 0.5283 m2/s2 in Case MF.
- The values of the peak equivalent displacement () are similar in the two cases. = 0.2597 m in Case FM, whereas = 0.2431 m in Case MF.
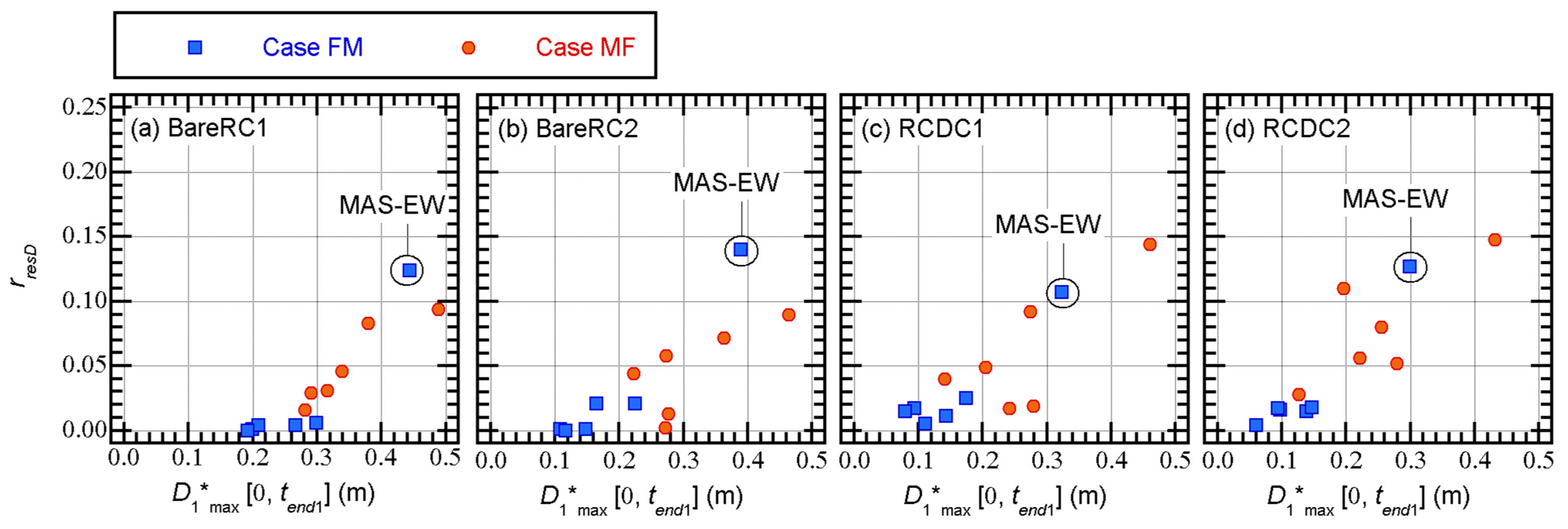
- The residual equivalent displacement after the first earthquake observed during the interval from 60 to 90 s is small in both cases.
- The hysteresis loop during UTO0414NS acceleration is different. In Case FM (where UTO0414NS acceleration is used for the first earthquake), the hysteresis loop during UTO0414NS acceleration is not thick (i.e., there is little hysteretic energy dissipation). In contrast, the hysteresis loop during UTO0414NS acceleration is thick (i.e., there is much hysteretic energy dissipation) in Case MF (where UTO0414NS acceleration is used for the second earthquake).
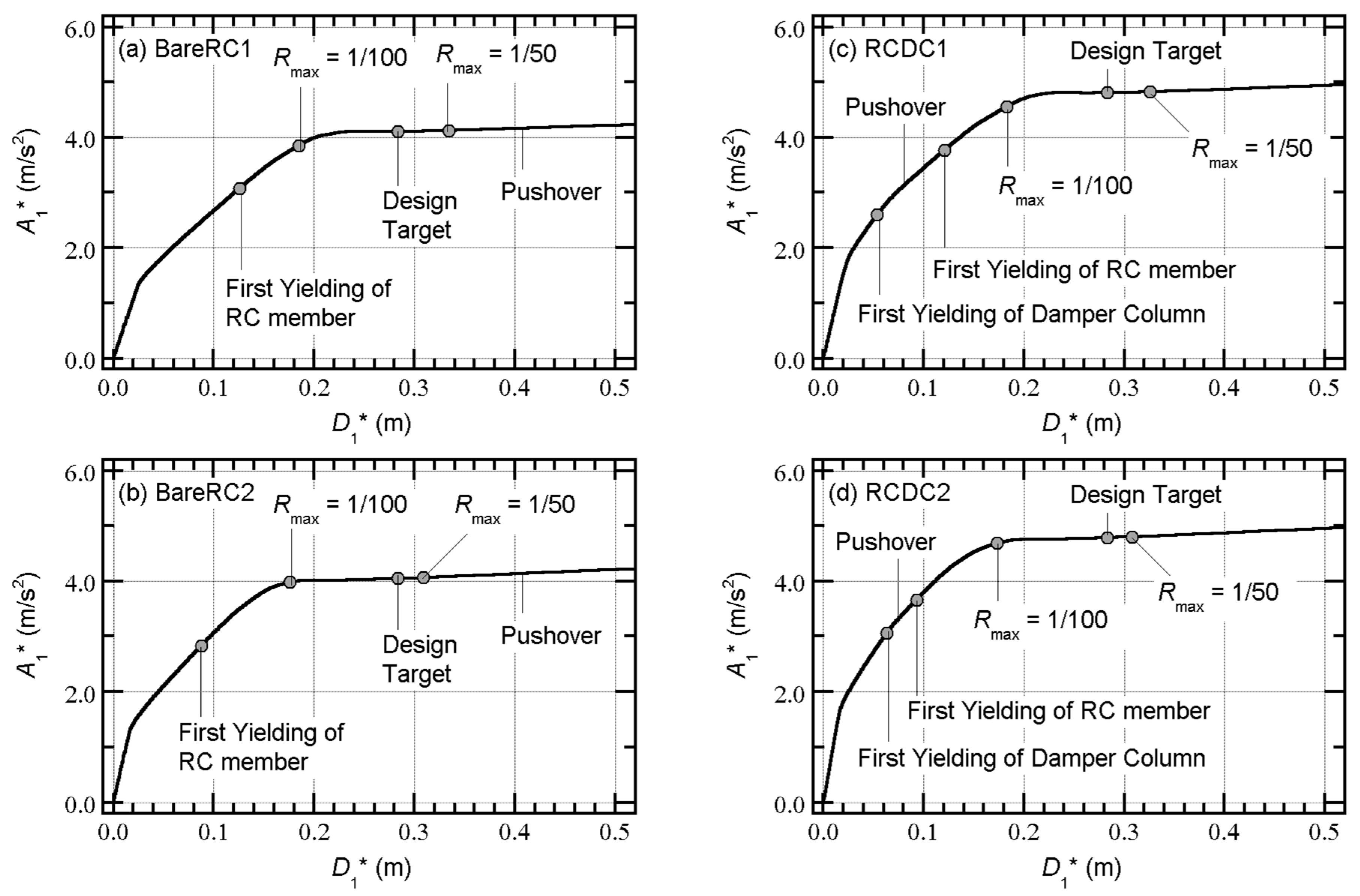
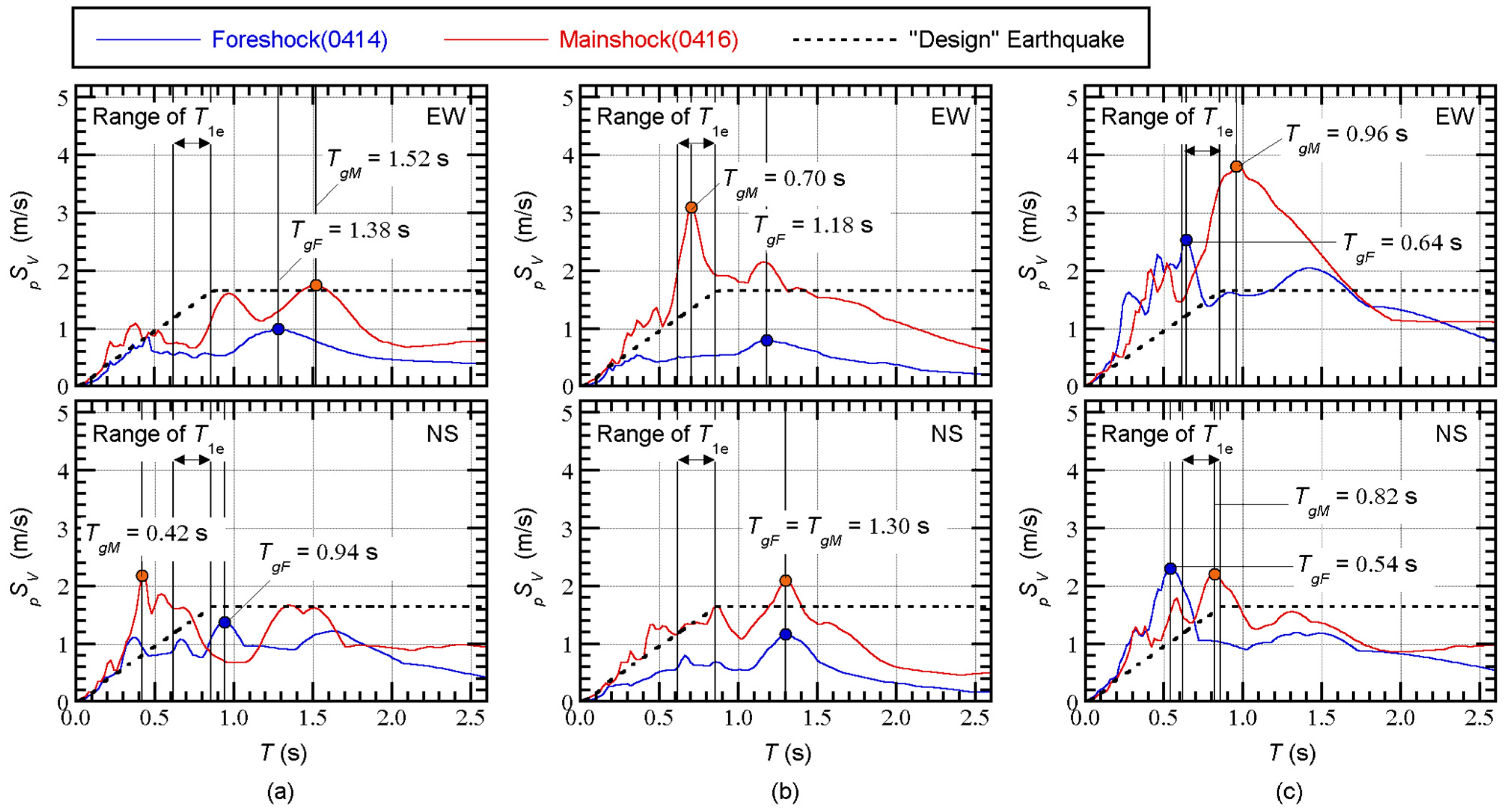
- According to the single acceleration shown in Figure 30a, the value of obtained in Case M (mainshock) is larger than that obtained in Case F (foreshock).
- The effect of the order of ground accelerations in sequential accelerations on is limited, as shown in Figure 30b. The value of obtained in Case FM is similar to that obtained in Case MF.
- obtained as the maximum of single accelerations (Case F, Case M) is similar to that obtained as the maximum of sequential accelerations (Case FM, Case MF), as shown in Figure 30c.
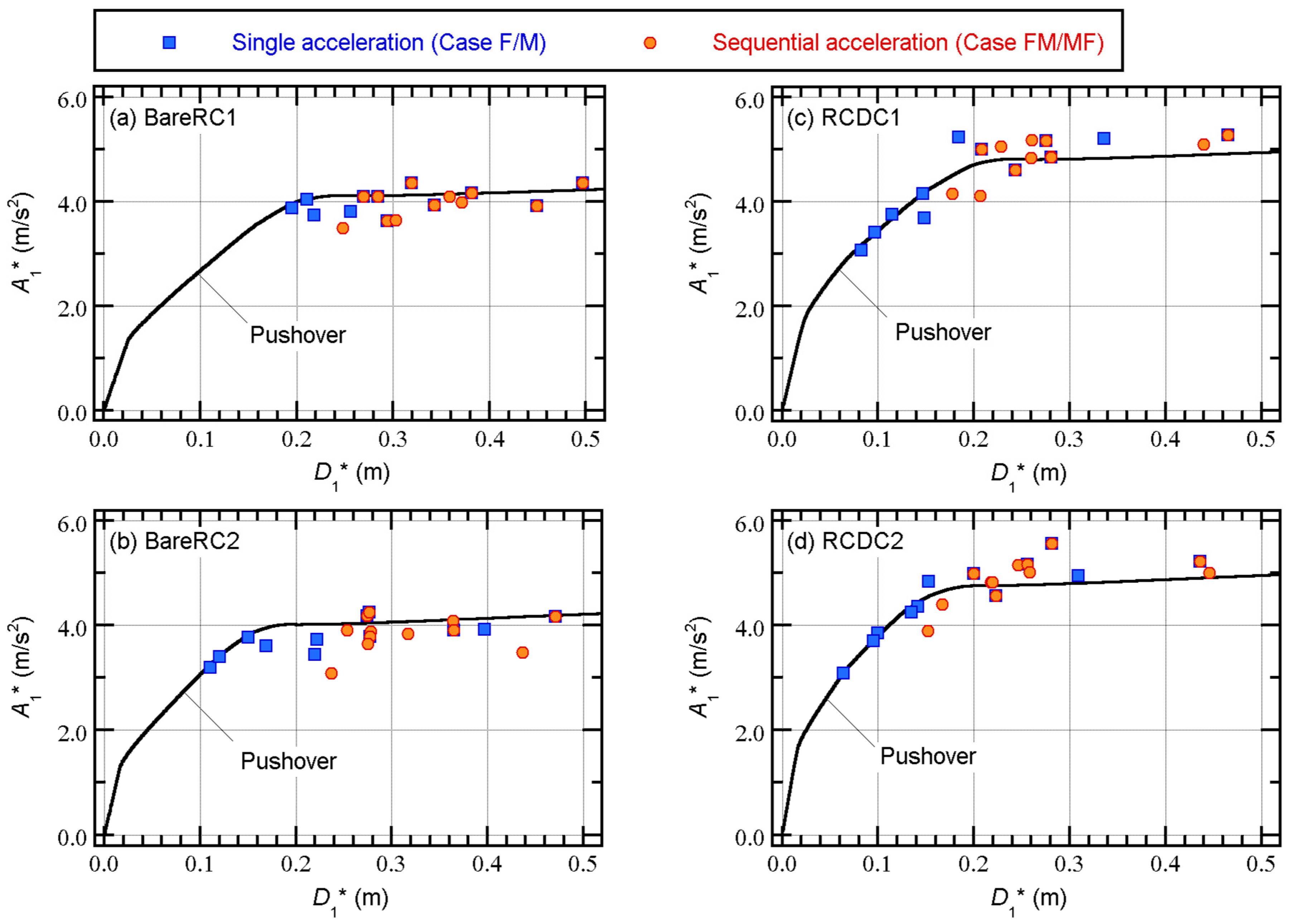
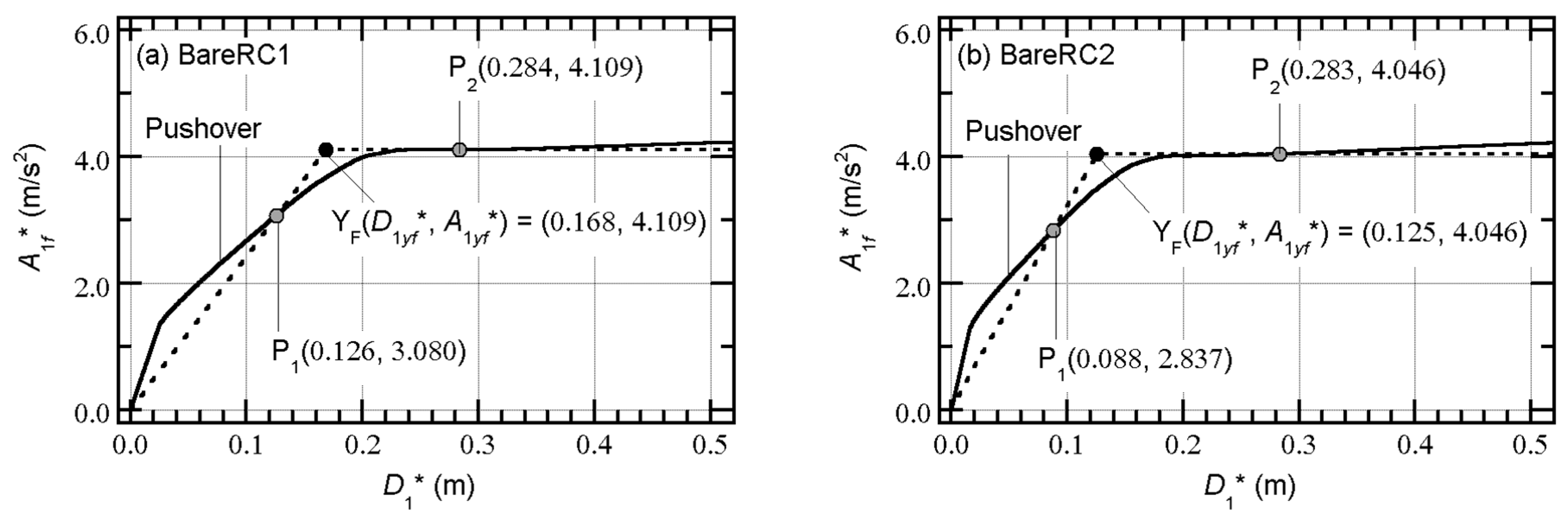
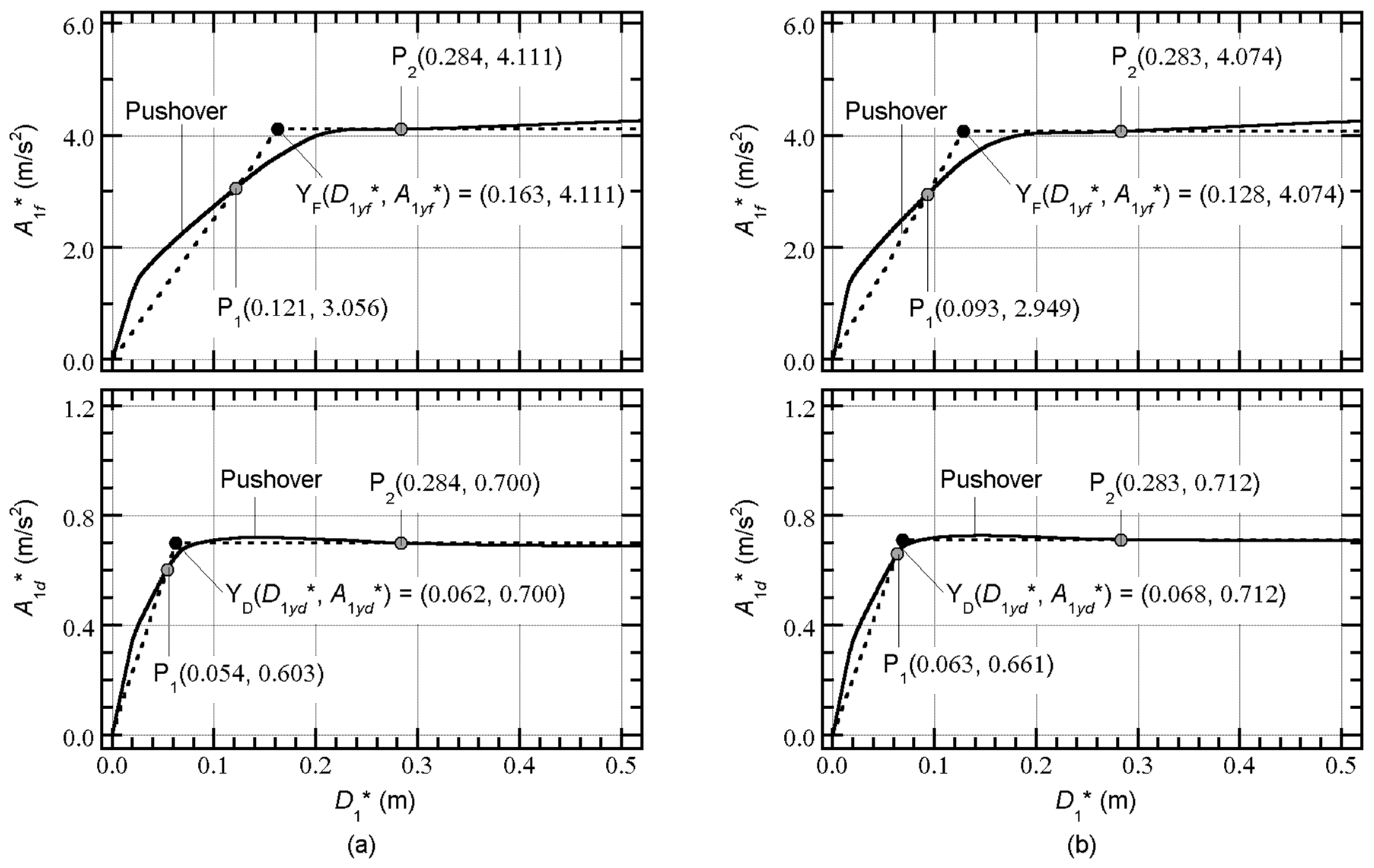
4.3. Modeling of the Hysteretic Energy Dissipation of the First Modal Response in a Half Cycle
4.4. Summary of Discussions
- A method of calculating the first modal response from the results of time-history analysis is proposed. When this method is adopted, the first mode vector is assumed from the time history of the relative horizontal displacement vector.
- The effect of the order of sequential ground accelerations on the peak equivalent displacement of the first modal response () is limited.
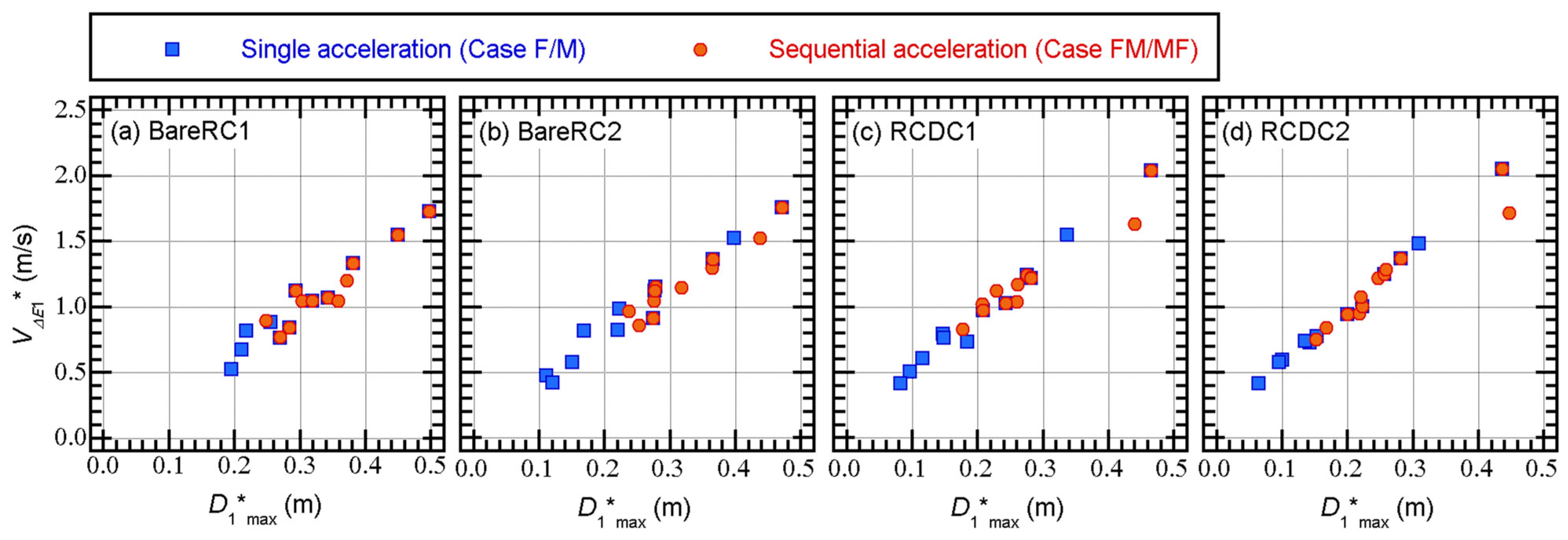
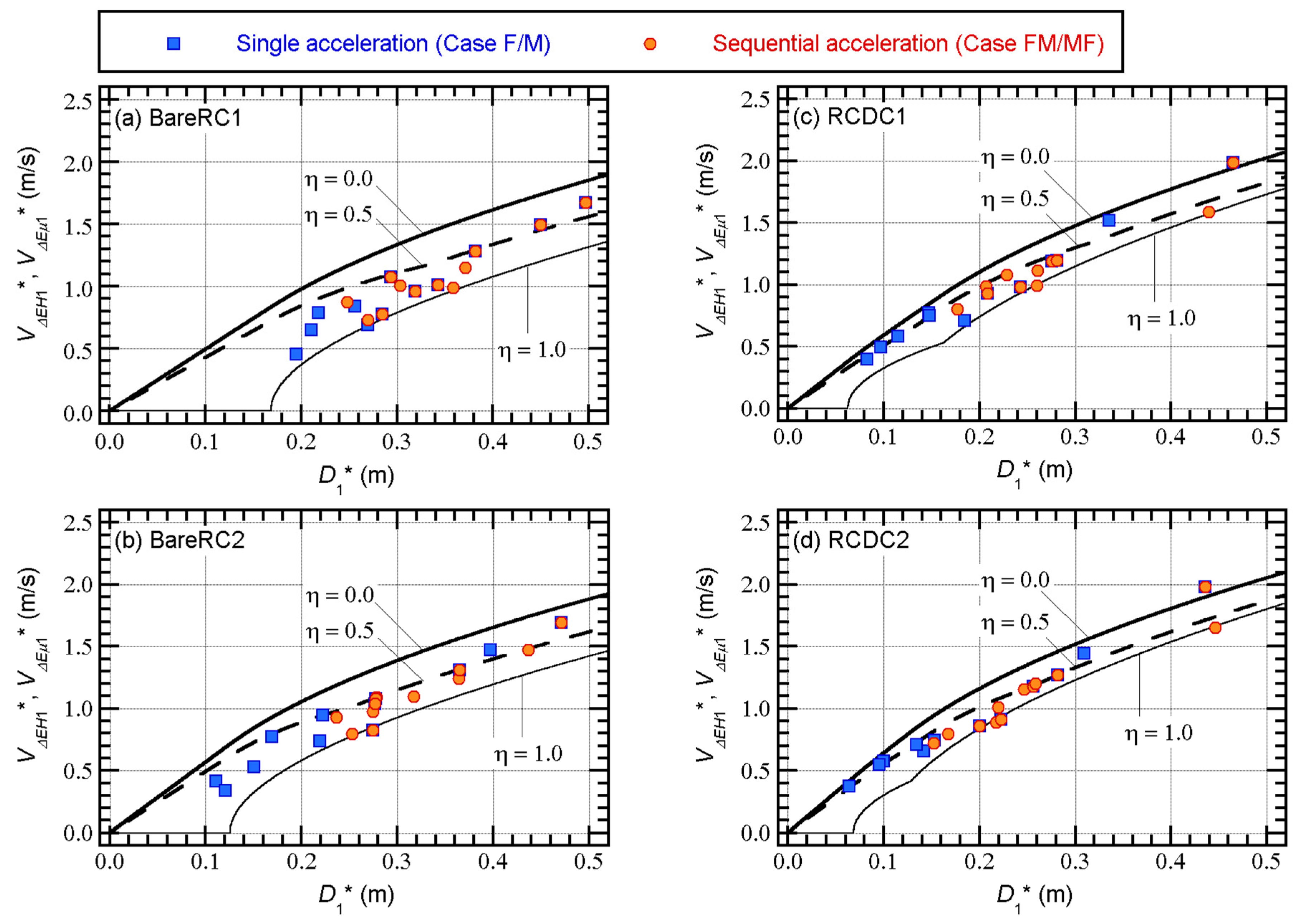
- A clear relationship is observed between the equivalent velocity of the maximum momentary input energy of the first modal response () and for both sequential accelerations and single accelerations; i.e., the peak displacement increases with . Therefore, the concept of the maximum momentary energy input may be applicable to the prediction of the peak response under sequential accelerations.
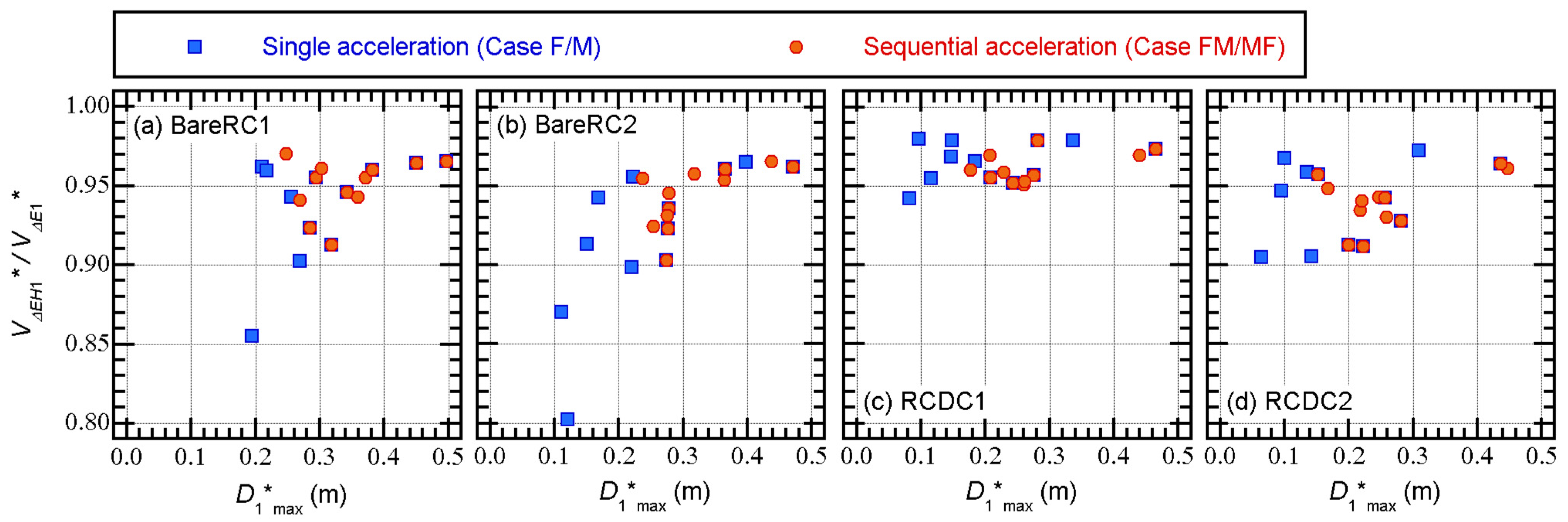
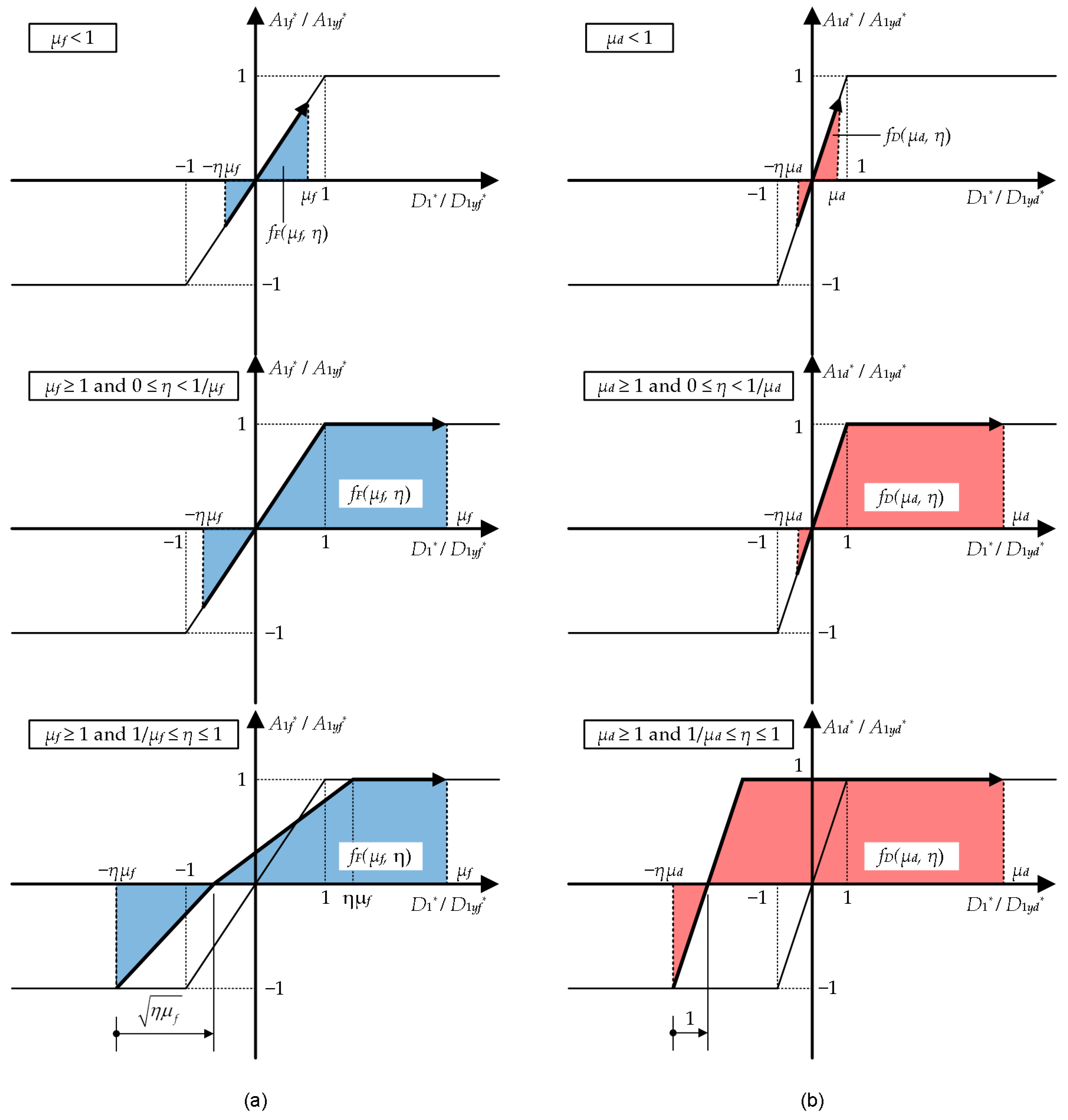
- A simplified model capable of evaluating the hysteretic dissipated energy of the first modal response in a half cycle for given equivalent displacement () is proposed. The simplified model can be used to evaluate the relationship between the equivalent velocity of the hysteretic dissipated energy in a half cycle () and with accuracy. The simplified model is applicable to RC MRFs with and without steel damper columns subjected to sequential accelerations.
5. Conclusions
- The peak response of RC MRFs with damper columns subjected to sequential accelerations recorded in the 2016 Kumamoto earthquake is similar to the peak response obtained considering only the mainshock. However, the cumulative strain energy of RC MRFs accumulates in the event of sequential accelerations.
- The steel damper column is effective for reducing the peak and cumulative responses of RC MRFs in the case of sequential seismic input. The results of nonlinear time-history analysis presented in this study indicate that the installation of steel damper columns can reduce the story drift of RC MRFs and the peak plastic rotation and cumulative strain energy of RC beam ends. However, the designer and structural engineer should pay attention to the behavior of short-span beams in the presence of steel damper columns; i.e., the use of a short-span beam may result in severe damage if its energy absorption capacity is insufficient.
- The relation of the hysteretic dissipated energy during a half cycle of the structural response and the peak displacement of the first modal response can be properly evaluated using the simple model proposed in this study. The proposed simple model can be applied for RC MRFs with and without hysteresis dampers.
- The first point is that the results presented in Section 3 emphasize the importance of the cumulative response of the structures in the case of seismic sequences. Unlike the peak deformation of the members, the cumulative strain energy accumulates in the event of seismic sequences. The evaluation of the cumulative response is important because the peak deformation and the cumulative strain energy are essential parameters for evaluating the structural damage to members.
- The second point is that the method of calculating the first model response presented here is effective for the post-analysis of nonlinear time-history analysis. This calculation can help the analyst further understand the nonlinear response; e.g., the calculated first modal response can be compared directly with the response of the idealized SDOF model. Note that this calculation is applicable to the post-analysis of the nonlinear time-history analysis and also experimental results, provided the building considered oscillates in the first mode.
- The third point is that the simplified modeling of the hysteretic dissipated energy during a half cycle of the structural response for a given peak equivalent displacement discussed in Section 4 is essential to the prediction of the peak response of RC MRFs with steel damper columns. Using the maximum momentary input energy spectrum introduced by Inoue and his coauthors [59,60,61], the peak equivalent displacement of the first modal response can be predicted.
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. Definition of the Momentary Input Energy
Appendix B. Model Properties

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Member | Location | Width (mm) | Depth (mm) | Longitudinal Reinforcement |
|---|---|---|---|---|
| Z6 to Z10 | 500 | 900 | 10-D29 (Top and bottom) | |
| Z5 | 550 | 900 | 8-D32 (Top and bottom) | |
| Beam | Z4 | 600 | 900 | 9-D32 (Top and bottom) |
| Z2 to Z3 | 600 | 900 | 8-D35 (Top and bottom) | |
| Z1 | 800 | 900 | 9-D38 (Top and bottom) | |
| Column | 1st Story (Bottom) | 900 | 900 | 10-D38 |
| Story | Yield Strength | Panel Thickness (mm) | Panel Sectional Area (mm2) | Column (mm × mm × mm × mm) | |
|---|---|---|---|---|---|
| QyDL (kN) | QyDU (kN) | ||||
| 10 | 438 | 641 | 6 | 3700 | H-600 × 200 × 12 × 25 |
| 9 | 626 | 916 | 9 | 5290 | H-600 × 250 × 16 × 32 |
| 8 | 755 | 1105 | 9 | 6380 | H-700 × 300 × 16 × 28 |
| 7 | 968 | 1417 | 9 | 8180 | H-900 × 300 × 16 × 28 |
| 5 to 6 | 1251 | 1831 | 9 | 10,580 | H-600 × 250 × 16 × 32 (Doubled) |
| 1 to 4 | 1551 | 2211 | 9 | 12,760 | H-700 × 300 × 16 × 32 (Doubled) |
| Member | Location | Width (mm) | Depth (mm) | Longitudinal Reinforcement |
|---|---|---|---|---|
| Z6 to Z10 | 500 | 900 | 7-D29 (Top and bottom) | |
| Z5 | 550 | 900 | 7-D29 (Top and bottom) | |
| Beam | Z4 | 600 | 900 | 6-D32 (Top and bottom) |
| Z2 to Z3 | 600 | 900 | 10-D25 (Top and bottom) | |
| Z1 | 800 | 900 | 9-D32 (Top and bottom) | |
| Column | 1st Story (Bottom) | 800 | 800 | 8-D35 |
| Story | Yield Strength | Panel Thickness (mm) | Panel Sectional Area (mm2) | Column (mm × mm × mm × mm) | |
|---|---|---|---|---|---|
| QyDL (kN) | QyDU (kN) | ||||
| 9 to 10 | 438 | 641 | 6 | 3700 | H-600 × 200 × 12 × 25 |
| 7 to 8 | 626 | 916 | 9 | 5290 | H-600 × 250 × 16 × 32 |
| 6 | 755 | 1105 | 9 | 6380 | H-700 × 300 × 16 × 28 |
| 5 | 862 | 1261 | 9 | 7280 | H-800 × 300 × 16 × 28 |
| 2 to 4 | 968 | 1417 | 9 | 8180 | H-900 × 300 × 16 × 28 |
| 1 | 1251 | 1841 | 12 | 10,630 | H-900 × 300 × 19 × 32 |
References
- Wada, A.; Huang, Y.H.; Iwata, M. Passive damping technology for building in Japan. Prog. Struct. Eng. Mater. 2000, 8, 335–350. [Google Scholar] [CrossRef]
- Katayama, T.; Ito, S.; Kamura, H.; Ueki, T.; Okamoto, H. Experimental study on hysteretic damper with low yield strength steel under dynamic loading. In Proceedings of the 12th World Conference on Earthquake Engineering, Auckland, New Zealand, 30 January–4 February 2000. [Google Scholar]
- Mukouyama, R.; Fujii, K.; Irie, C.; Tobari, R.; Yoshinaga, M.; Miyagawa, K. Displacement-controlled Seismic Design Method of Reinforced Concrete Frame with Steel Damper Column. In Proceedings of the 17th World Conference on Earthquake Engineering, Sendai, Japan, 27 September–2 October 2021. [Google Scholar]
- Mukouyama, R. Displacement-controlled Seismic Design of R/C Frame with Steel Damper Column. Master’s Thesis, Chiba Institute of Technology, Chiba, Japan, March 2022. (In Japanese). [Google Scholar]
- Fujii, K.; Kato, M. Strength balance of steel damper columns and surrounding beams in reinforced concrete frames. In Proceedings of the 13th International Conference on Earthquake Resistant Engineering Structures, Online, 26–28 May 2021. [Google Scholar]
- Mahin, S.A. Effect of duration and aftershocks on inelastic design earthquakes. In Proceedings of the Seventh World Conference on Earthquake Engineering, Istanbul, Turkey, 8–13 September 1980. [Google Scholar]
- Amadio, C.; Fragiacomo, M.; Rajgelj, S. The effects of repeated earthquake ground motions on the non-linear response of SDOF systems. Earthq. Eng. Struct. Dyn. 2003, 32, 291–308. [Google Scholar] [CrossRef]
- Hatzigeorgiou, G.D.; Beskos, D.E. Inelastic displacement ratios for SDOF structures subjected to repeated earthquakes. Eng. Struct. 2009, 31, 2744–2755. [Google Scholar] [CrossRef]
- Hatzigeorgiou, G.D. Behavior factors for nonlinear structures subjected to multiple near-fault earthquakes. Comput. Struct. 2010, 88, 309–321. [Google Scholar] [CrossRef]
- Hatzigeorgiou, G.D. Ductility demand spectra for multiple near- and far-fault earthquakes. Soil Dyn. Earthq. Eng. 2010, 30, 170–183. [Google Scholar] [CrossRef]
- Hatzigeorgiou, G.D.; Liolios, A.A. Nonlinear behaviour of RC frames under repeated strong ground motions. Soil Dyn. Earthq. Eng. 2010, 30, 1010–1025. [Google Scholar] [CrossRef]
- Faisal, A.; Majid, T.A.; Hatzigeorgiou, G.D. Investigation of story ductility demands of inelastic concrete frames subjected to repeated earthquakes. Soil Dyn. Earthq. Eng. 2013, 44, 42–53. [Google Scholar] [CrossRef]
- Hatzivassiliou, M.; Hatzigeorgiou, G.D. Seismic sequence effects on three-dimensional reinforced concrete buildings. Soil Dyn. Earthq. Eng. 2015, 72, 77–80. [Google Scholar] [CrossRef]
- Ruiz-García, J.; Negrete-Manriquez, J.C. Evaluation of drift demands in existing steel frames under as-recorded far-field and near-fault mainshock–aftershock seismic sequences. Eng. Struct. 2011, 33, 621–634. [Google Scholar] [CrossRef]
- Ruiz-García, J. Issues on the response of existing buildings under mainshock-aftershock seismic sequences. In Proceedings of the 15th World Conference on Earthquake Engineering, Lisbon, Portugal, 24–28 September 2012. [Google Scholar]
- Ruiz-García, J.; Terán-Gilmore, A.; Díaz, G. Response of essential facilities under narrow-band mainshock-aftershock seismic sequences. In Proceedings of the 15th World Conference on Earthquake Engineering, Lisbon, Portugal, 24–28 September 2012. [Google Scholar]
- Ruiz-García, J. Mainshock-aftershock ground motion features and their influence in building’s seismic response. J. Earthq. Eng. 2012, 16, 719–737. [Google Scholar] [CrossRef]
- Ruiz-García, J.; Marín, M.V.; Terán-Gilmore, A. Effect of seismic sequences on the response of RC buildings located in soft soil sites. In Proceedings of the 2013 World Congress on Advances in Structural Engineering and Mechanics (ASEM13), Jeju, Korea, 8–12 September 2013. [Google Scholar]
- Ruiz-García, J. Three-dimensional building response under seismic sequences. In Proceedings of the 2013 World Congress on Advances in Structural Engineering and Mechanics (ASEM13), Jeju, Korea, 8–12 September 2013. [Google Scholar]
- Díaz-Martínez, G.; Ruiz-García, J.; Terán-Gilmore, A. Response of structures to seismic sequences corresponding to Mexican soft soils. Earthq. Struct. 2014, 7, 1241–1258. [Google Scholar] [CrossRef]
- Guerrero, H.; Ruíz-García, J.; Escobar, J.A.; Terán-Gilmore, A. Response to seismic sequences of short-period structures equipped with buckling-restrained braces located on the lakebed zone of Mexico City. J. Constr. Steel Res. 2017, 137, 37–51. [Google Scholar] [CrossRef]
- Ruiz-García, J.; Yaghmaei-Sabegh, S.; Bojórquez, E. Three-dimensional response of steel moment-resisting buildings under seismic sequences. Eng. Struct. 2018, 175, 399–414. [Google Scholar] [CrossRef]
- Goda, K. Nonlinear response potential of mainshock–aftershock sequences from Japanese earthquakes. Bull. Seismol. Soc. Am. 2012, 102, 2139–2156. [Google Scholar] [CrossRef]
- Goda, K. Peak ductility demand of mainshock-aftershock sequences for Japanese earthquakes. In Proceedings of the15th World Conference on Earthquake Engineering, Lisbon, Portugal, 24–28 September 2012. [Google Scholar]
- Goda, K. Record selection for aftershock incremental dynamic analysis. Earthq. Eng. Struct. Dyn. 2014, 44, 1157–1162. [Google Scholar] [CrossRef]
- Goda, K.; Wenzel, F.; De Risi, R. Empirical assessment of non-linear seismic demand of mainshock–aftershock ground-motion sequences for Japanese earthquakes. Front. Built Environ. 2015, 1, 6. [Google Scholar] [CrossRef]
- Tesfamariam, S.; Goda, K.; Mondal, G. Seismic vulnerability of reinforced concrete frame with unreinforced masonry infill due to mainshock–aftershock earthquake sequences. Earthq. Spectra 2015, 31, 1427–1449. [Google Scholar] [CrossRef]
- Tesfamariam, S.; Goda, K. Seismic performance evaluation framework considering maximum and residual inter-story drift ratios: Application to non-code conforming reinforced concrete buildings in Victoria, BC, Canada. Front. Built Environ. 2015, 1, 18. [Google Scholar] [CrossRef] [Green Version]
- Tesfamariam, S.; Goda, K. Energy-based seismic risk evaluation of tall reinforced concrete building in Vancouver, BC, Canada, under Mw9 megathrust subduction earthquakes and aftershocks. Front. Built Environ. 2017, 3, 29. [Google Scholar] [CrossRef] [Green Version]
- Zhai, C.H.; Wen, W.P.; Li, S.; Xie, L.L. The influences of seismic sequence on the inelastic SDOF systems. In Proceedings of the 15th World Conference on Earthquake Engineering, Lisbon, Portugal, 24–28 September 2012. [Google Scholar]
- Zhai, C.H.; Wen, W.P.; Chen, Z.Q.; Li, S.; Xie, L.L. Damage spectra for the mainshock–aftershock sequence-type ground motions. Soil Dyn. Earthq. Eng. 2013, 45, 1–12. [Google Scholar] [CrossRef]
- Zhai, C.H.; Wen, W.P.; Li, S.; Chen, Z.Q.; Chang, Z.; Xie, L.L. The damage investigation of inelastic SDOF structure under the mainshock–aftershock sequence-type ground motions. Soil Dyn. Earthq. Eng. 2014, 59, 30–41. [Google Scholar] [CrossRef]
- Di Sarno, L. Effects of multiple earthquakes on inelastic structural response. Eng. Struct. 2013, 56, 673–681. [Google Scholar] [CrossRef]
- Di Sarno, L.; Amiric, S. Period elongation of deteriorating structures under mainshock-aftershock sequences. Eng. Struct. 2019, 196, 109341. [Google Scholar] [CrossRef]
- Di Sarno, L.; Wu, J.R. Fragility assessment of existing low-rise steel moment-resisting frames with masonry infills under mainshock-aftershock earthquake sequences. Bull. Earthq. Eng. 2021, 19, 2483–2504. [Google Scholar] [CrossRef]
- Di Sarno, L.; Pugliese, F. Effects of mainshock-aftershock sequences on fragility analysis of RC buildings with ageing. Eng. Struct. 2021, 232, 111837. [Google Scholar] [CrossRef]
- Abdelnaby, A.E.; Elnashai, A.S. Performance of degrading reinforced concrete frame systems under the Tohoku and Christchurch Earthquake sequences. J. Earthq. Eng. 2014, 18, 1009–1036. [Google Scholar] [CrossRef]
- Abdelnaby, A.E.; Elnashai, A.S. Numerical modeling and analysis of RC frames subjected to multiple earthquakes. Earthq. Struct. 2015, 9, 957–981. [Google Scholar] [CrossRef]
- Abdelnaby, A.E. Fragility Curves for RC Frames Subjected to Tohoku Mainshock-Aftershocks Sequences. J. Earthq. Eng. 2016, 22, 902–920. [Google Scholar] [CrossRef]
- Hosseinpour, F.; Abdelnaby, A.E. Effect of different aspects of multiple earthquakes on the nonlinear behavior of RC structures. Soil Dyn. Earthq. Eng. 2017, 92, 706–725. [Google Scholar] [CrossRef]
- Oyguc, R.; Toros, C.; Abdelnaby, A.E. Seismic behavior of irregular reinforced-concrete structures under multiple earthquake excitations. Soil Dyn. Earthq. Eng. 2018, 104, 15–32. [Google Scholar] [CrossRef]
- Kagermanov, A.; Gee, R. Cyclic pushover method for seismic performance assessment under multiple earthquakes. In Proceedings of the 16th European Conference on Earthquake Engineering, Thessaloniki, Greece, 18–21 June 2018. [Google Scholar]
- Kagermanov, A.; Gee, R. Cyclic pushover method for seismic assessment under multiple earthquakes. Earthq. Spectra 2019, 35, 1541–1588. [Google Scholar] [CrossRef]
- Yang, F.; Wang, G.; Ding, Y. Damage demands evaluation of reinforced concrete frame structure subjected to near-fault seismic sequences. Nat. Hazards 2019, 97, 841–860. [Google Scholar] [CrossRef]
- Yang, F.; Wang, G.; Li, M. Evaluation of the seismic retrofitting of mainshock-damaged reinforced concrete frame structure using steel braces with soft steel dampers. Appl. Sci. 2021, 11, 841. [Google Scholar] [CrossRef]
- Yaghmaei-Sabegh, S.; Mahdipour-Moghanni, R. State-dependent fragility curves using real and artificial earthquake sequences. Asian J. Civ. Eng. 2019, 20, 619–625. [Google Scholar] [CrossRef]
- Qiao, Y.H.; Lu, D.G.; Hui Yu, X.H. Shaking table tests of a reinforced concrete frame subjected to mainshock-aftershock sequences. J. Earthq. Eng. 2020, 1–20. [Google Scholar] [CrossRef]
- Orlacchio, M.; Baltzopoulos, G.; Iervolino, I. State-dependent seismic fragility via pushover analysis. In Proceedings of the 17th World Conference on Earthquake Engineering, Sendai, Japan, 20 September–2 November 2021. [Google Scholar]
- Hoveidae, N.; Radpour, S. Performance evaluation of buckling-restrained braced frames under repeated earthquakes. Bull. Earthq. Eng. 2021, 19, 241–262. [Google Scholar] [CrossRef]
- Pirooz, R.M.; Habashi, S.; Massumi, A. Required time gap between mainshock and aftershock for dynamic analysis of structures. Bull. Earthq. Eng. 2021, 19, 2643–2670. [Google Scholar] [CrossRef]
- Park, Y.J.; Ang, A.H.S. Mechanistic seismic damage model for reinforced concrete. J. Struct. Eng. ASCE 1985, 111, 722–739. [Google Scholar] [CrossRef]
- Akiyama, H. Earthquake–Resistant Limit–State Design for Buildings; University of Tokyo Press: Tokyo, Japan, 1985. [Google Scholar]
- Uang, C.M.; Bertero, V.V. Evaluation of seismic energy in structures. Earthq. Eng. Struct. Dyn. 1990, 19, 77–90. [Google Scholar] [CrossRef]
- Fajfar, P.; Vidic, T. Consistent inelastic design spectra: Hysteretic and input energy. Earthq. Eng. Struct. Dyn. 1994, 23, 523–537. [Google Scholar] [CrossRef]
- Sucuoǧlu, H.; Nurtuǧ, A. Earthquake ground motion characteristics and seismic energy dissipation. Earthq. Eng. Struct. Dyn. 1995, 24, 1195–1213. [Google Scholar] [CrossRef]
- Nurtuǧ, A.; Sucuoǧlu, H. Prediction of seismic energy dissipation in SDOF systems. Earthq. Eng. Struct. Dyn. 1995, 24, 1215–1223. [Google Scholar] [CrossRef]
- Chai, Y.H.; Fajfar, P.; Romstad, K.M. Formulation of duration-dependent inelastic seismic design spectrum. J. Struct. Eng. 1998, 124, 913–921. [Google Scholar] [CrossRef]
- Cheng, Y.; Lucchini, A.; Mollaioli, F. Ground-motion prediction equations for constant-strength and constant-ductility input energy spectra. Bull. Earthq. Eng. 2020, 18, 37–55. [Google Scholar] [CrossRef]
- Nakamura, T.; Hori, N.; Inoue, N. Evaluation of damaging properties of ground motions and estimation of maximum displacement based on momentary input energy. J. Struct. Constr. Eng. Trans. AIJ 1998, 63, 65–72. (In Japanese) [Google Scholar] [CrossRef]
- Inoue, N.; Wenliuhan, H.; Kanno, H.; Hori, N.; Ogawa, J. Shaking Table Tests of Reinforced Concrete Columns Subjected to Simulated Input Motions with Different Time Durations. In Proceedings of the 12th World Conference on Earthquake Engineering, Auckland, New Zealand, 30 January–4 February 2000. [Google Scholar]
- Hori, N.; Inoue, N. Damaging properties of ground motion and prediction of maximum response of structures based on momentary energy input. Earthq. Eng. Struct. Dyn. 2002, 31, 1657–1679. [Google Scholar] [CrossRef]
- Fujii, K.; Kanno, H.; Nishida, T. Formulation of the time-varying function of momentary energy input to a SDOF system by Fourier series. J. Jpn. Assoc. Earthq. Eng. 2021, 21, 28–47. [Google Scholar] [CrossRef]
- Fujii, K.; Murakami, Y. Bidirectional momentary energy input to a one-mass two-DOF system. In Proceedings of the 17th World Conference on Earthquake Engineering, Sendai, Japan, 20 September–2 November 2021. [Google Scholar]
- Fujii, K. Bidirectional seismic energy input to an isotropic nonlinear one-mass two-degree-of-freedom system. Buildings 2021, 11, 143. [Google Scholar] [CrossRef]
- Fujii, K.; Masuda, T. Application of Mode-Adaptive Bidirectional Pushover Analysis to an Irregular Reinforced Concrete Building Retrofitted via Base Isolation. Appl. Sci. 2021, 11, 9829. [Google Scholar] [CrossRef]
- Strong-Motion Seismograph Networks (K-NET, KiK-net). Available online: https://www.kyoshin.bosai.go.jp/ (accessed on 7 January 2022).
- AIJ. AIJ Standard for Lateral Load-Carrying Capacity Calculation of Reinforced Concrete Structures (Draft); Architectural Institute of Japan: Tokyo, Japan, 2016. (In Japanese) [Google Scholar]
- Sugano, S.; Koreishi, I. An empirical evaluation of inelastic behaviour of structural elements in reinforced concrete frames subjected to lateral forces. In Proceedings of the 5th World Conference on Earthquake Engineering, Rome, Italy, 25–29 June 1974. [Google Scholar]
- Muto, K.; Hisada, T.; Tsugawa, T.; Bessho, S. Earthquake resistant design of a 20 story reinforced concrete buildings. In Proceedings of the 5th World Conference on Earthquake Engineering, Rome, Italy, 25–29 June 1974. [Google Scholar]
- Umemura, H.; Ichinose, T.; Ohashi, K.; Maekawa, J. Hysteresis Model for RC Members Considering Strength Deterioration. In Proceedings of the Japan Concrete Institute, Tsukuba, Japan, 19–21 June 2002. (In Japanese). [Google Scholar]
- Baber, T.T.; Noori, M.N. Random Vibration of Degrading, Pinching Systems. J. Eng. Mech. ASCE 1985, 111, 1010–1026. [Google Scholar] [CrossRef]
- Ono, Y.; Kaneko, H. Constitutive rules of the steel damper and source code for the analysis program. In Proceedings of the Passive Control Symposium 2001, Yokohama, Japan, 14–15 December 2001. (In Japanese). [Google Scholar]
- Vaiana, N.; Sessa, S.; Marmo, F.; Rosati, L. A class of uniaxial phenomenological models for simulating hysteretic phenomena in rate-independent mechanical systems and materials. Nonlinear Dyn. 2018, 93, 1647–1669. [Google Scholar] [CrossRef]
- Vaiana, N.; Napolitano, C.; Rosati, L. Some recent advances on the modeling of the hysteretic behavior of rate-independent passive energy dissipation devices. In Proceedings of the 8th ECCOMAS Thematic Conference on Computational Methods in Structural Dynamics and Earthquake Engineering (COMPDYN 2021), Athens, Greece, 28–30 June 2021. [Google Scholar]
- Nuzzo, I.; Losanno, D.; Caterino, N.; Serino, G.; Rotondo, L.M.B. Experimental and analytical characterization of steel shear links for seismic energy dissipation. Eng. Struct. 2018, 172, 405–418. [Google Scholar] [CrossRef]
- Fujii, K. Prediction of the largest peak nonlinear seismic response of asymmetric buildings under bi-directional excitation using pushover analyses. Bull. Earthq. Eng. 2014, 12, 909–938. [Google Scholar] [CrossRef]
- Building Center of Japan (BCJ). The Building Standard Law of Japan on CD-ROM; The Building Center of Japan: Tokyo, Japan, 2016. [Google Scholar]
- Miranda, E. Evaluation of site-dependent inelastic seismic design spectra. J. Struct. Eng. ASCE 1993, 119, 1319–1338. [Google Scholar] [CrossRef]






































| BareRC1, RCDC1 | BareRC2, RCDC2 | |
|---|---|---|
| Short-span Beam (beams connected to damper column) | (only RCDC1) | (only RCDC2) |
| Long-span Beam (other beams) | ||
| Column (bottom-end of the first story) |
| BareRC1 | BareRC2 | RCDC1 | RCDC2 | |
|---|---|---|---|---|
| (s) | 0.8547 | 0.7106 | 0.7044 | 0.6152 |
| (s) | 0.2834 | 0.2427 | 0.2344 | 0.2094 |
| (s) | 0.1577 | 0.1369 | 0.1330 | 0.1195 |
| Station Name | Event Date | Distance | Ground Motion ID | PGA (m/s2) | |
|---|---|---|---|---|---|
| EW | NS | ||||
| K-NET Kumamoto (KMM) | 14 April 2016 | 6 km | KMM0414 | 3.814 | 5.744 |
| 16 April 2016 | 5 km | KMM0416 | 6.162 | 8.272 | |
| K-NET Uto (UTO) | 14 April 2016 | 15 km | UTO0414 | 3.042 | 2.635 |
| 16 April 2016 | 12 km | UTO0416 | 7.711 | 6.515 | |
| KIK-NET Mashiki (MAS) | 14 April 2016 | 6 km | MAS0414 | 9.250 | 7.598 |
| 16 April 2016 | 7 km | MAS0416 | 11.569 | 6.530 | |
| Case | Acceleration Sequence |
|---|---|
| Case-F | Foreshock (0414) only |
| Case-FM | Foreshock (0414) + Mainshock (0416) |
| Case-M | Mainshock (0416) only |
| Case-MF | Mainshock (0416) + Foreshock (0414) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fujii, K. Peak and Cumulative Response of Reinforced Concrete Frames with Steel Damper Columns under Seismic Sequences. Buildings 2022, 12, 275. https://doi.org/10.3390/buildings12030275
Fujii K. Peak and Cumulative Response of Reinforced Concrete Frames with Steel Damper Columns under Seismic Sequences. Buildings. 2022; 12(3):275. https://doi.org/10.3390/buildings12030275
Chicago/Turabian StyleFujii, Kenji. 2022. "Peak and Cumulative Response of Reinforced Concrete Frames with Steel Damper Columns under Seismic Sequences" Buildings 12, no. 3: 275. https://doi.org/10.3390/buildings12030275
APA StyleFujii, K. (2022). Peak and Cumulative Response of Reinforced Concrete Frames with Steel Damper Columns under Seismic Sequences. Buildings, 12(3), 275. https://doi.org/10.3390/buildings12030275