Lateral Buckling Theory and Experimental Study on Pipe-in-Pipe Structure


Abstract
:1. Introduction
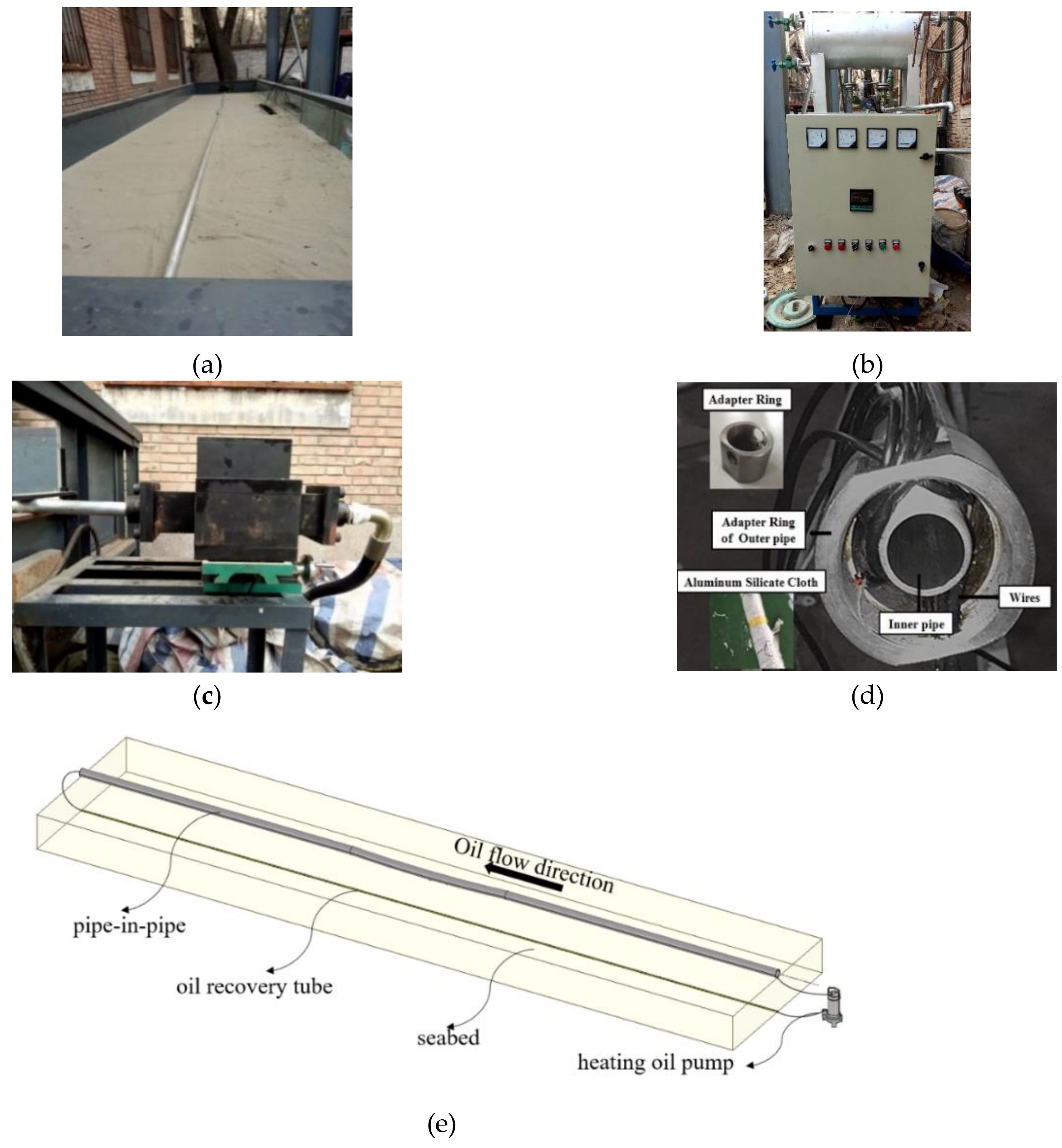
2. Global Buckling Experiment of the PIP Structure
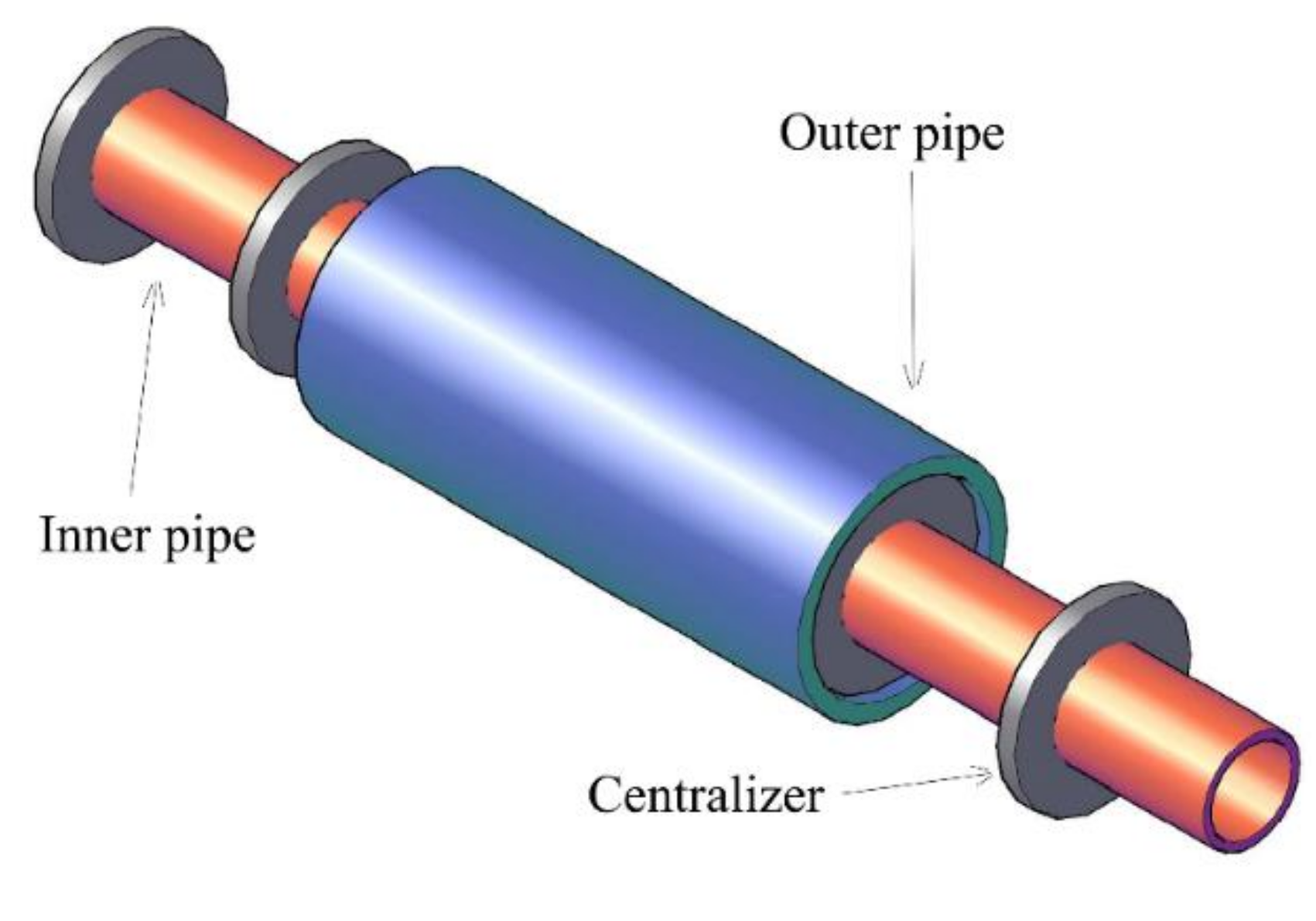
2.1. Experimental Design
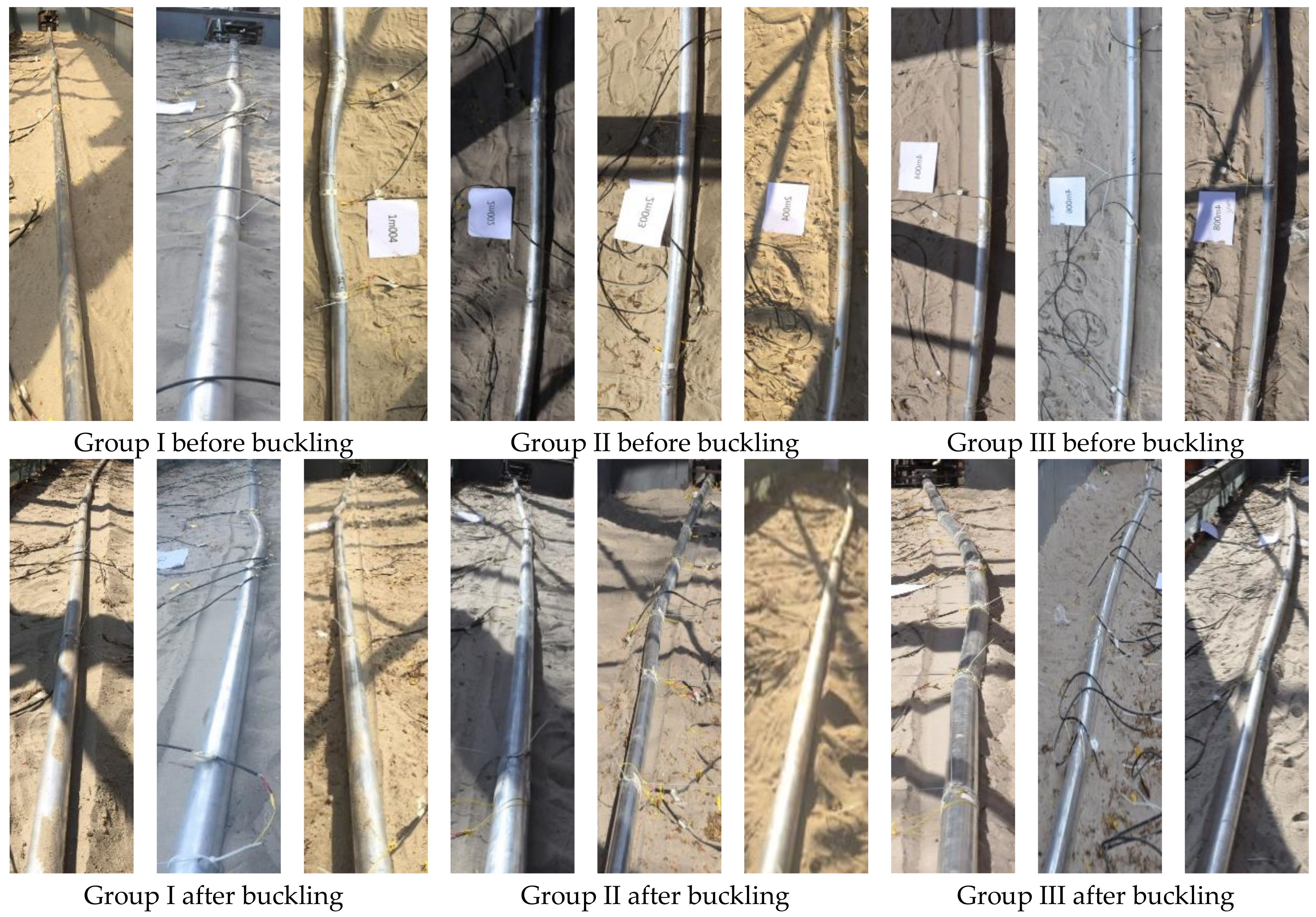
2.2. Analysis of Experimental Results
3. Parameter Analysis of Global Lateral Buckling
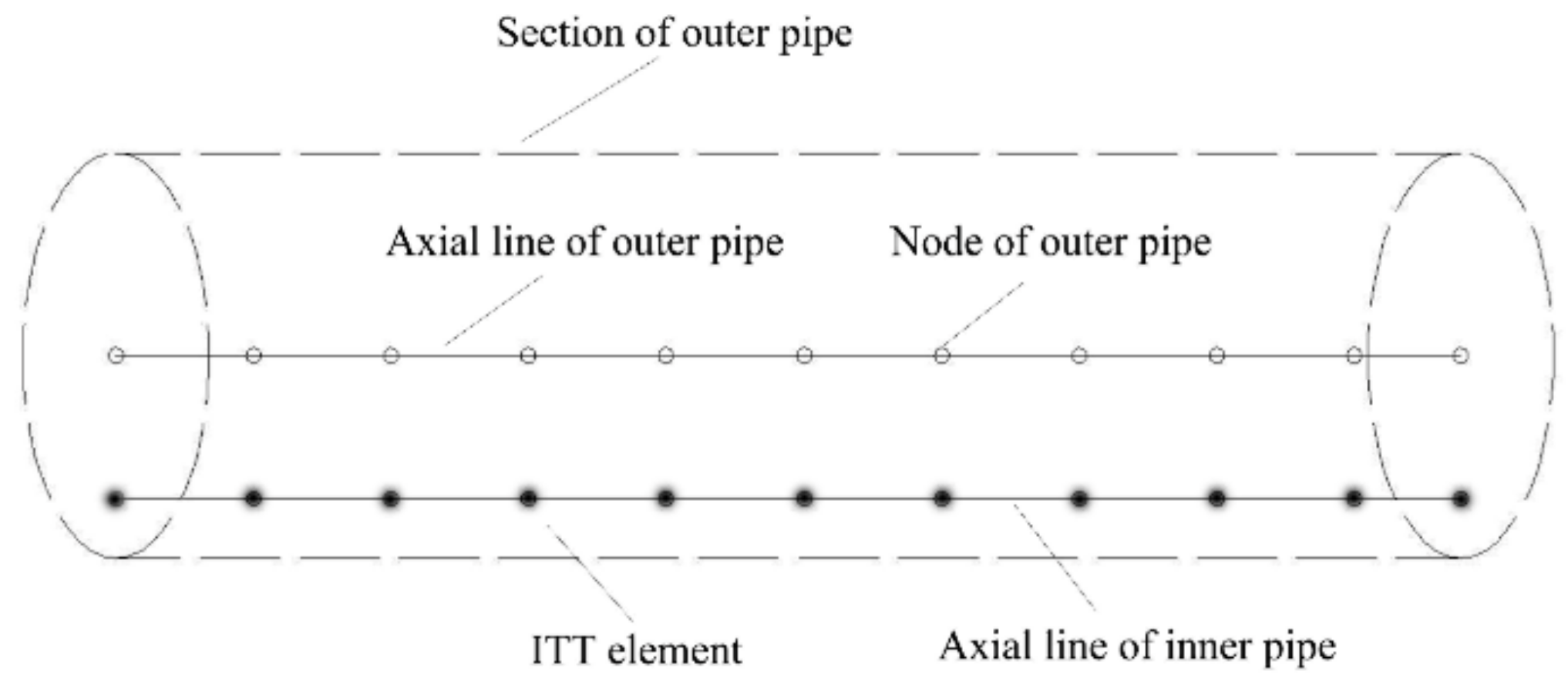
3.1. Finite Element Modeling Method
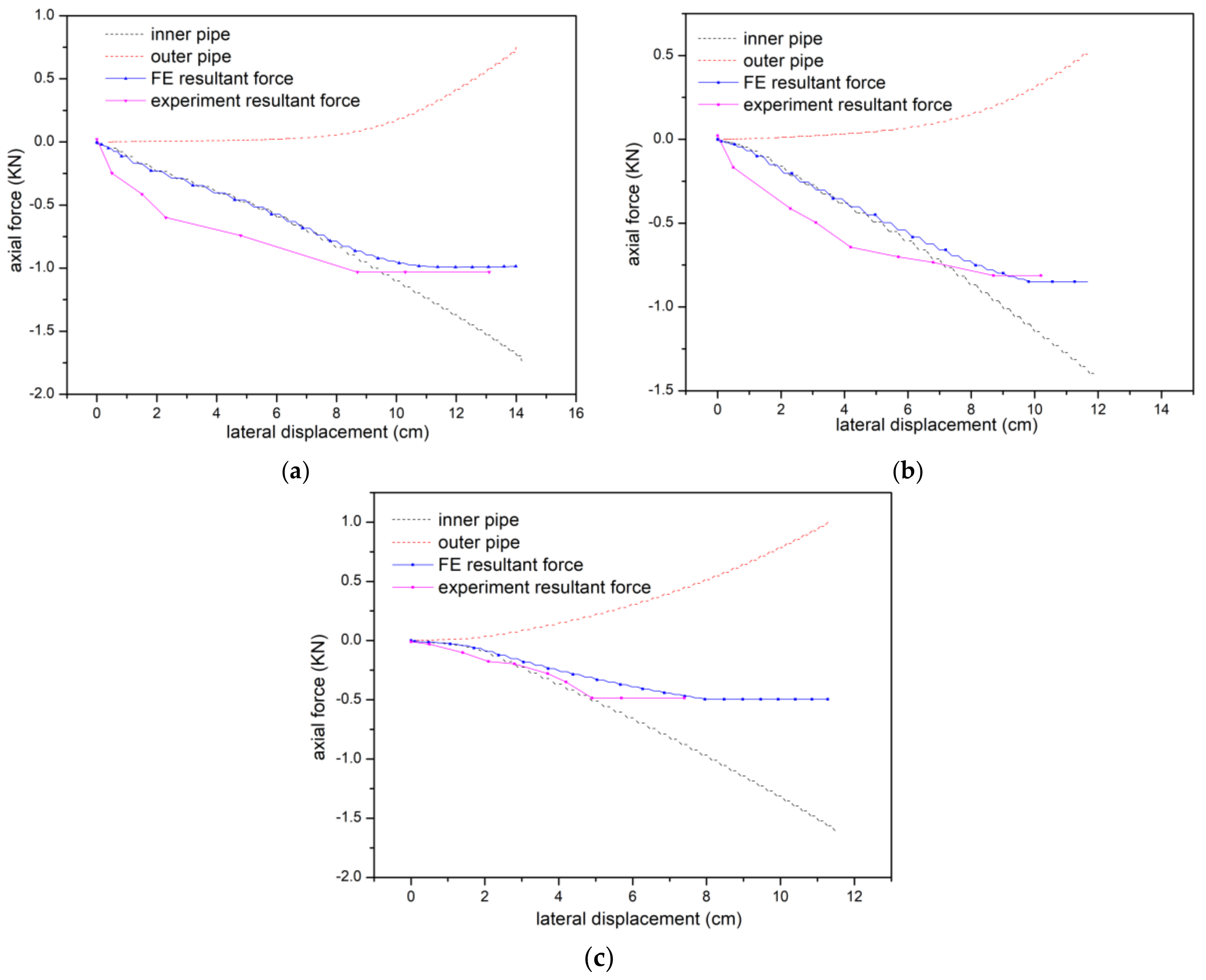
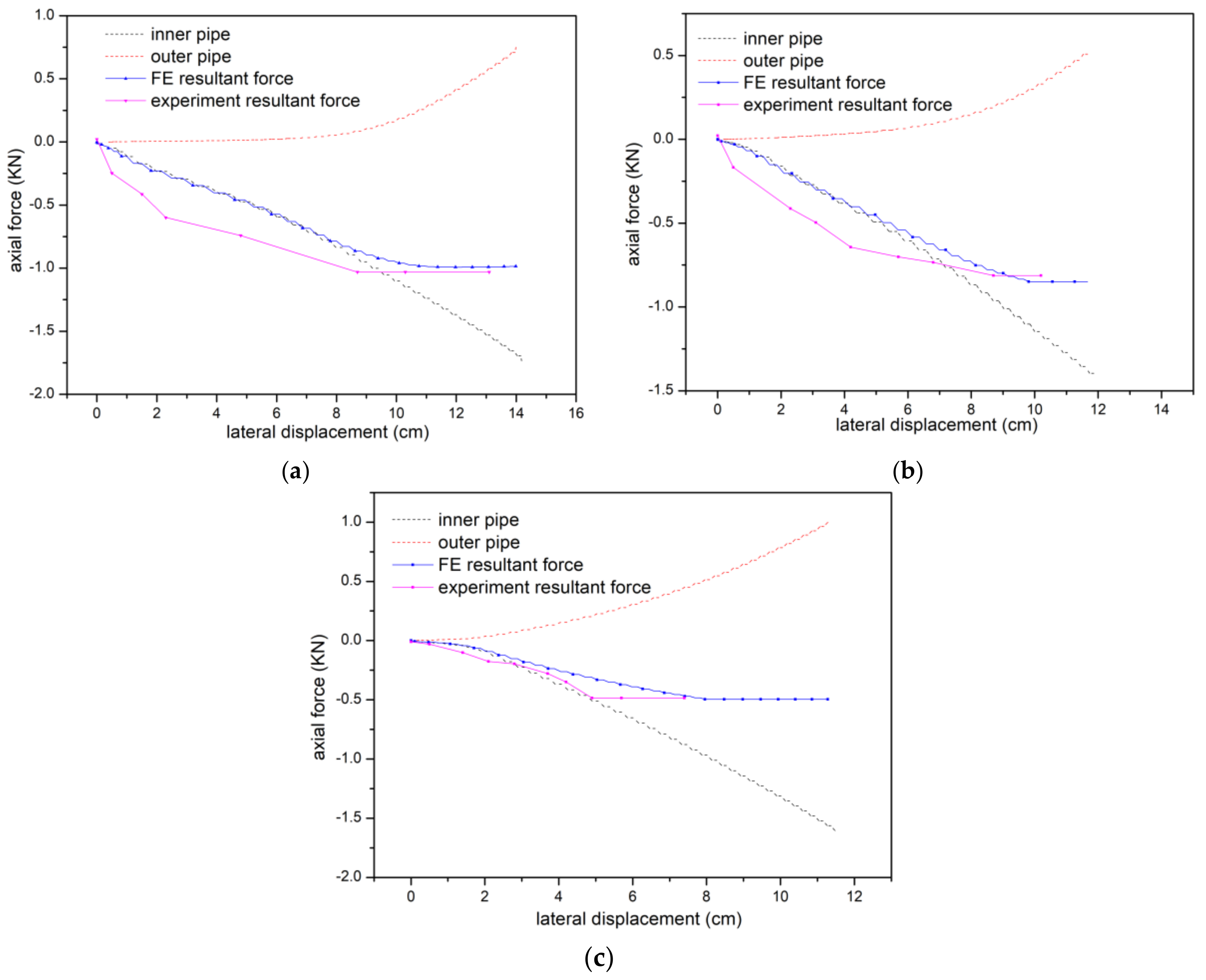
3.2. Model Verification
3.3. Parameter Analysis
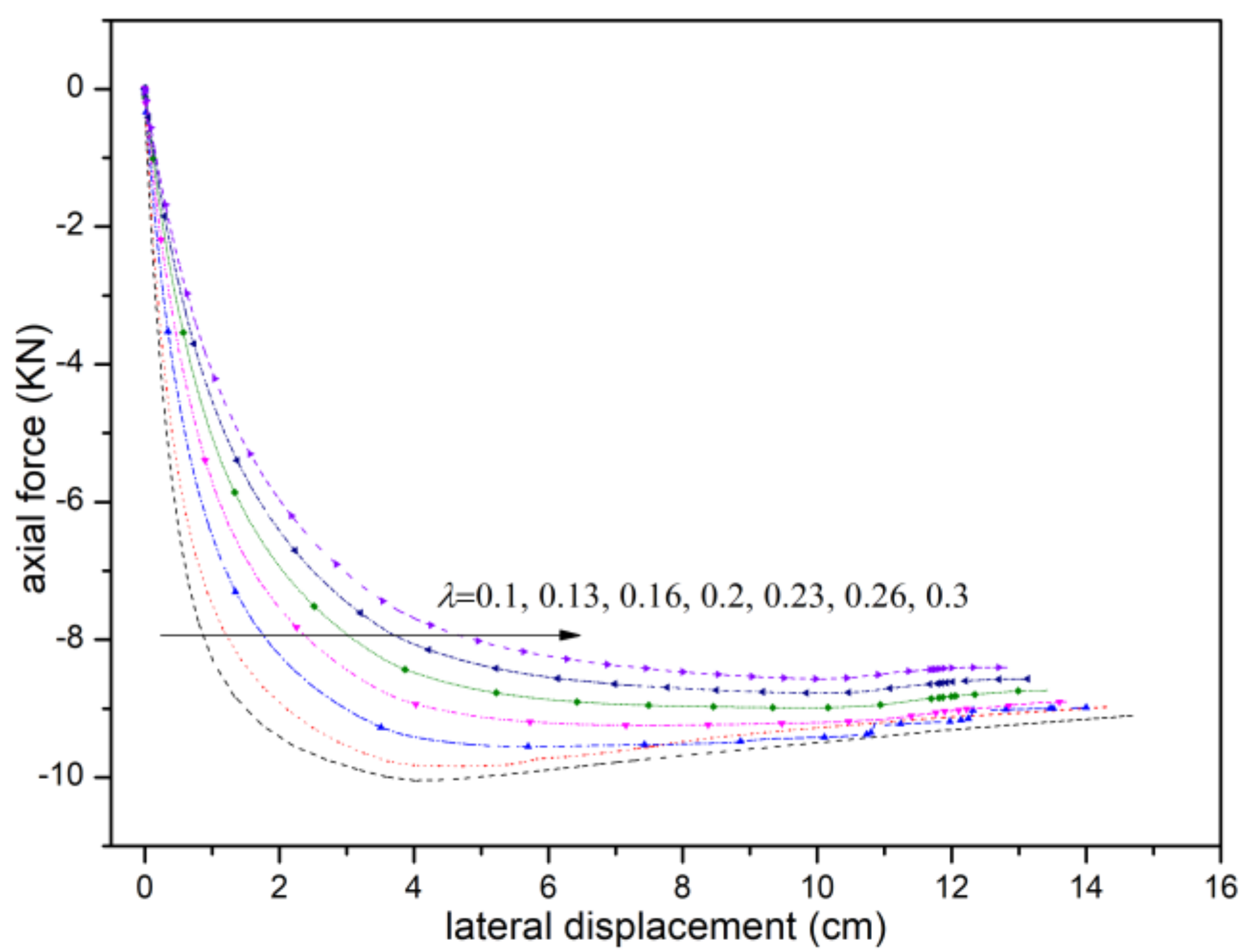
3.3.1. Influence of Initial Imperfections
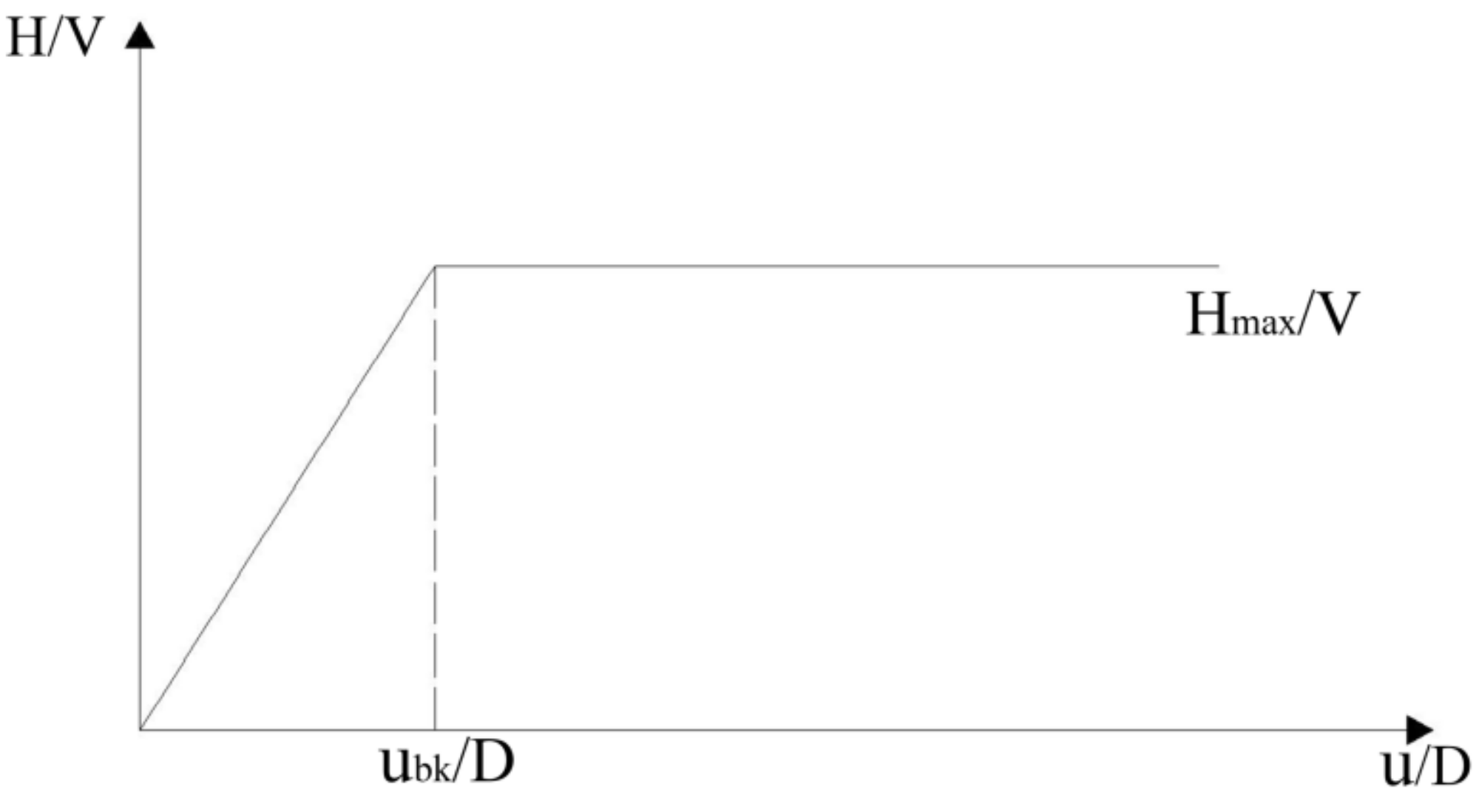
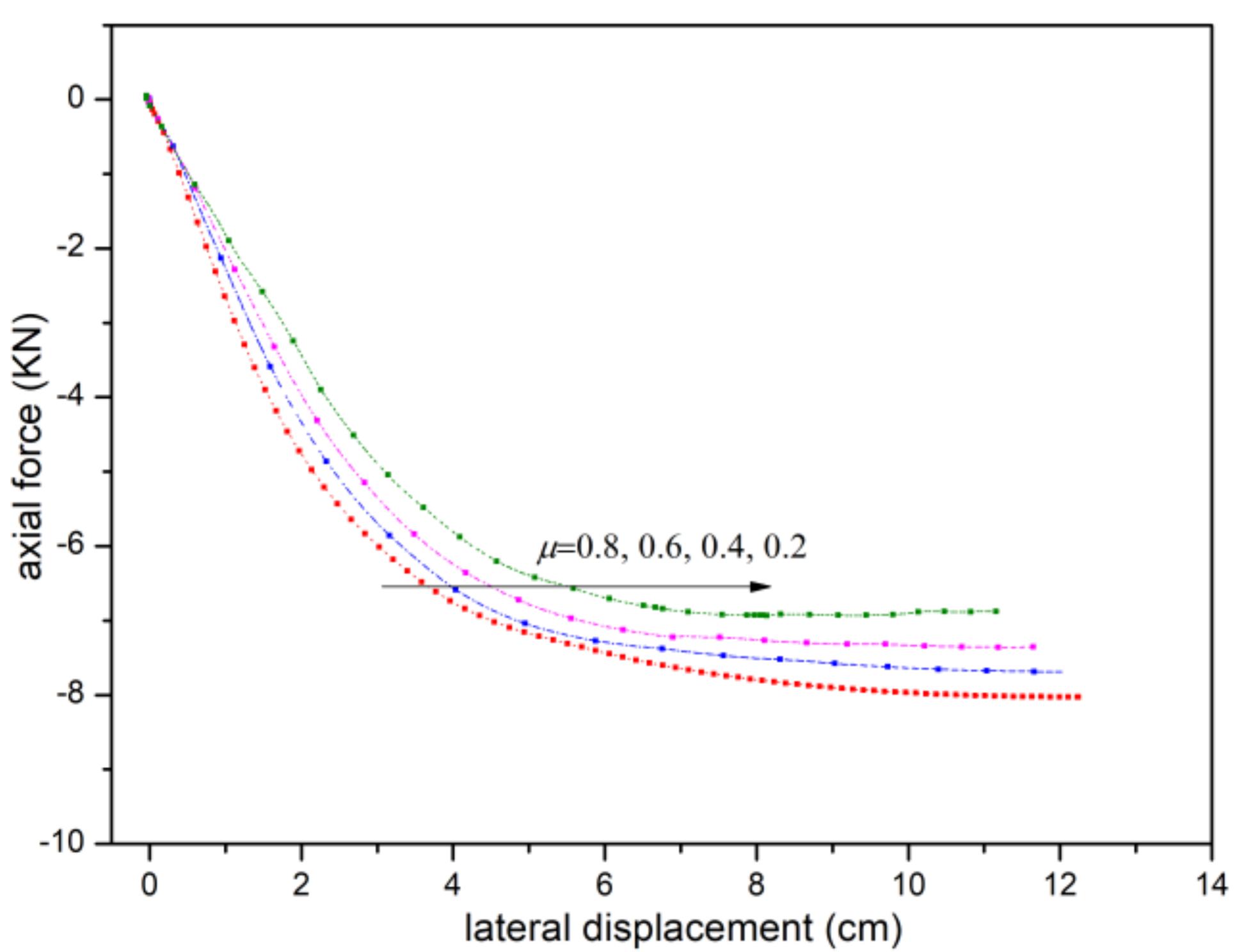
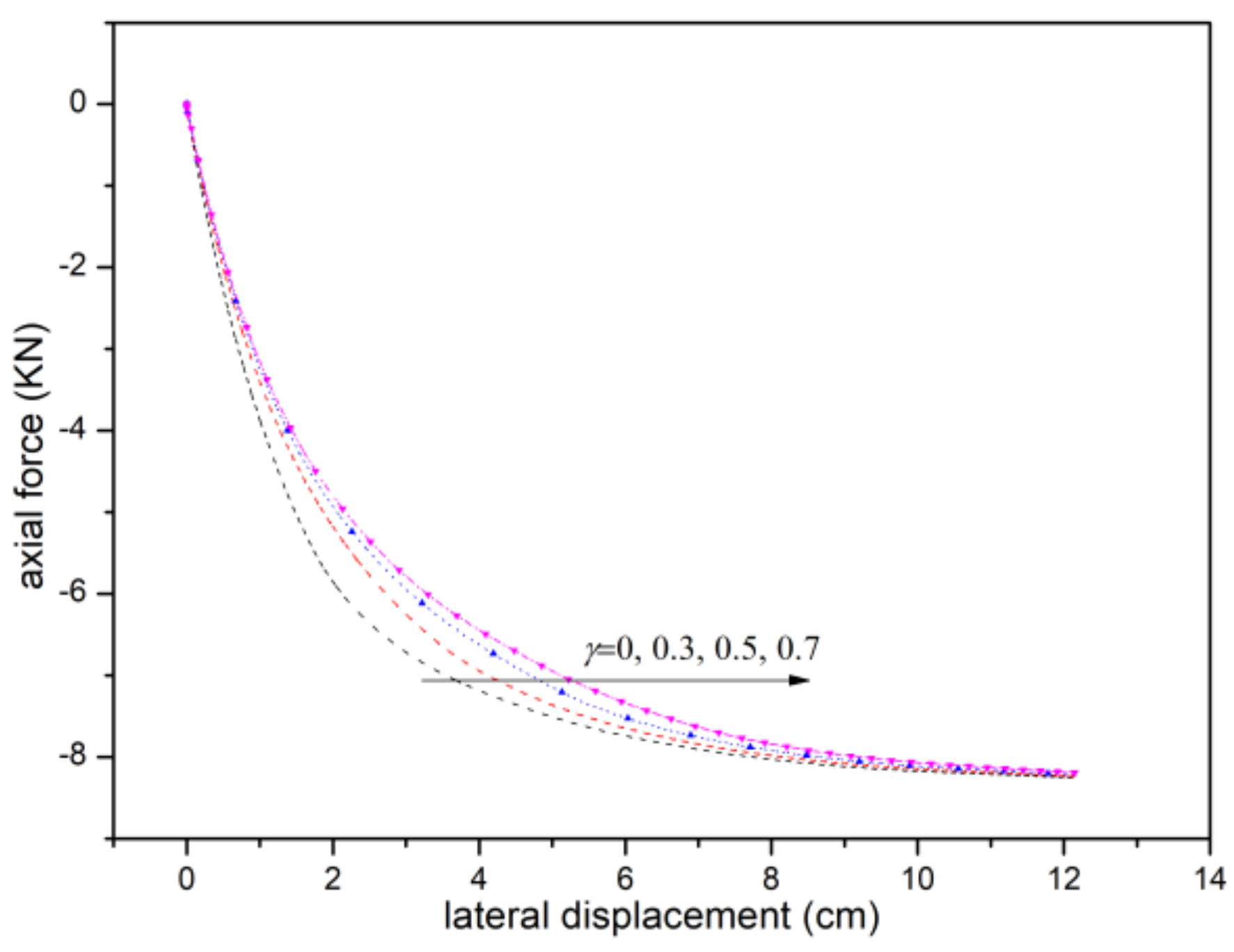
3.3.2. Influence of Pipe-Soil Interaction
3.3.3. Influence of Height of Centralizers
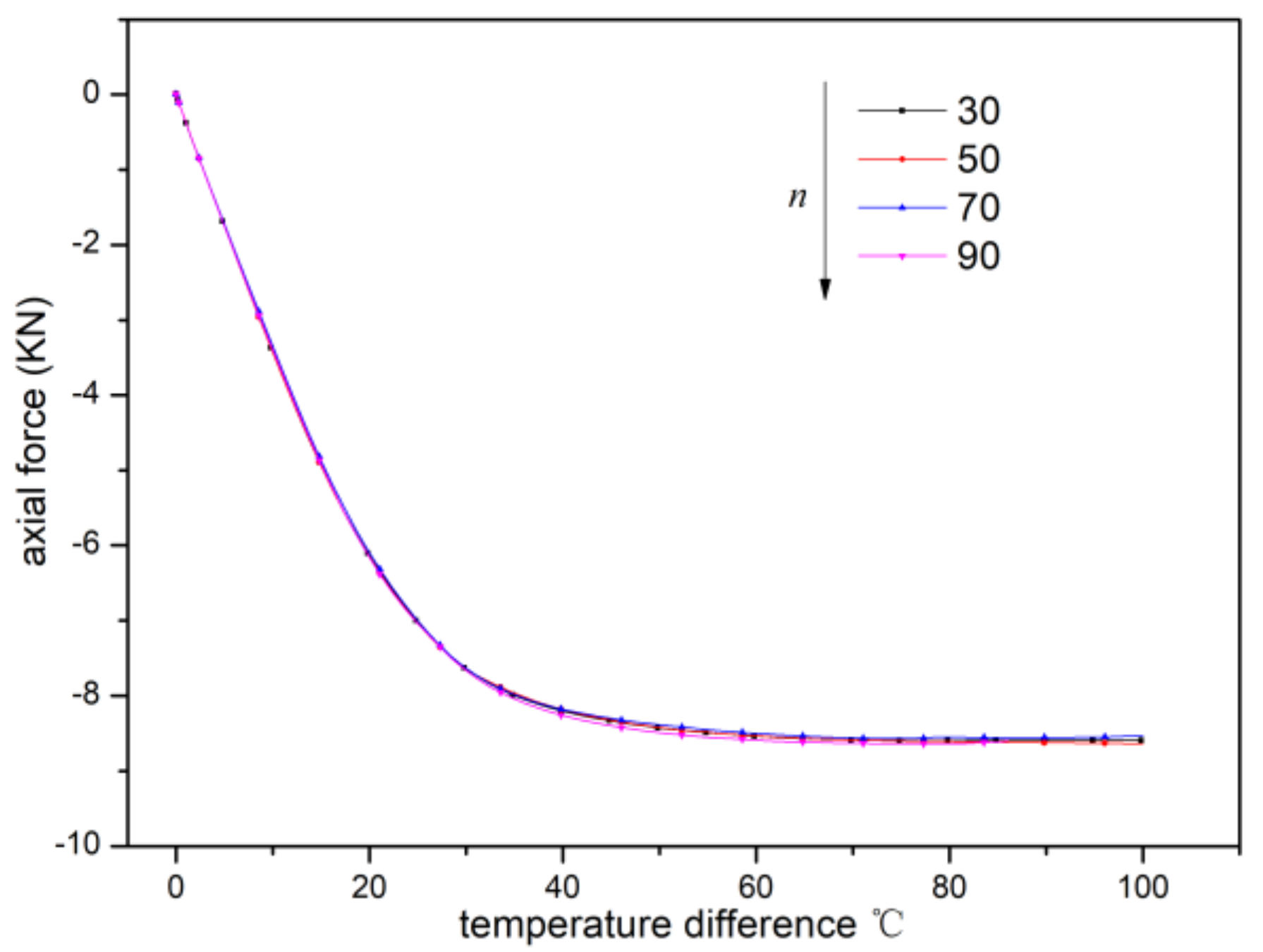
3.3.4. Influence of the Number of Centralizers
4. Computational Formula of Lateral Buckling Axial Force
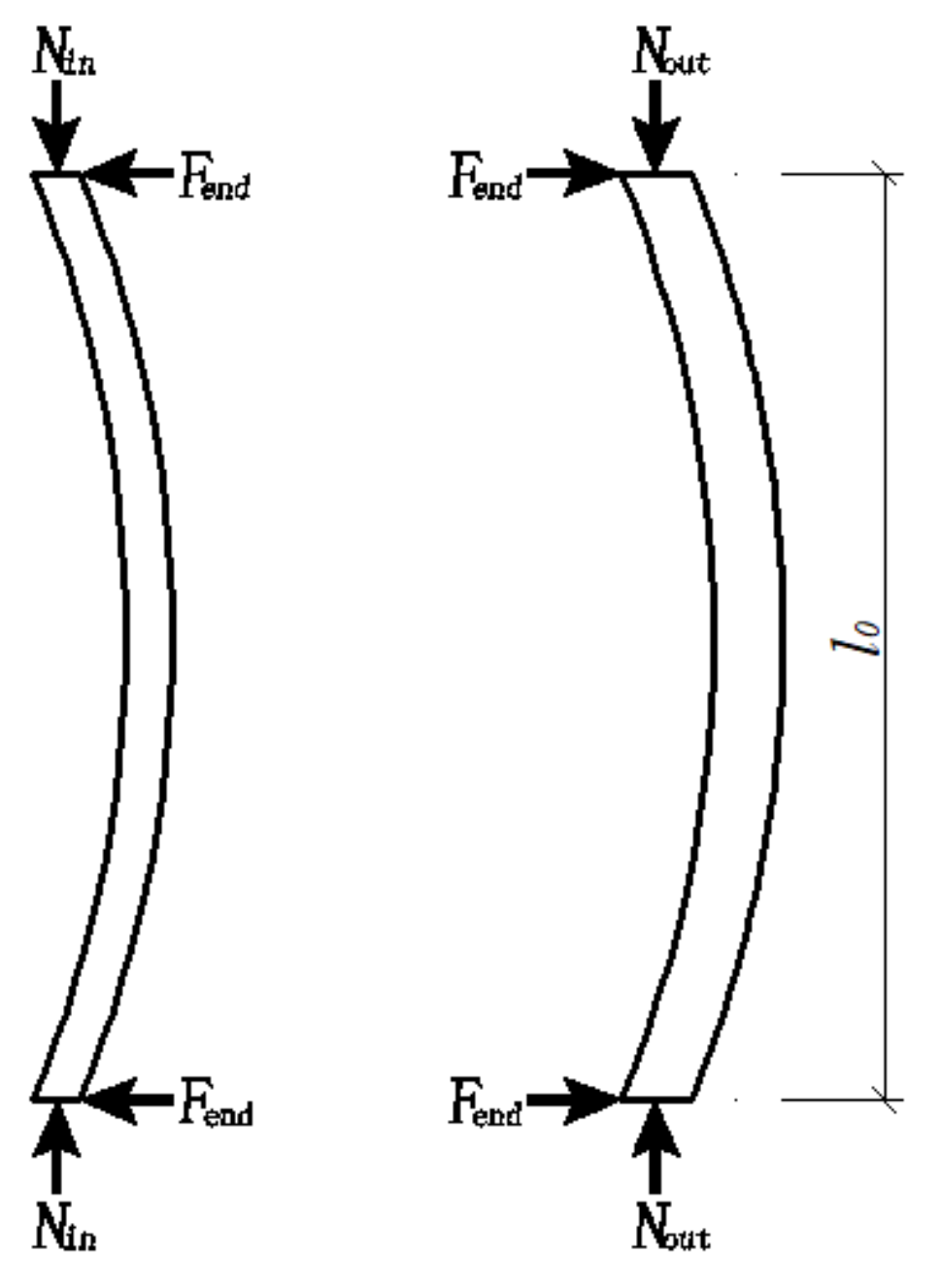
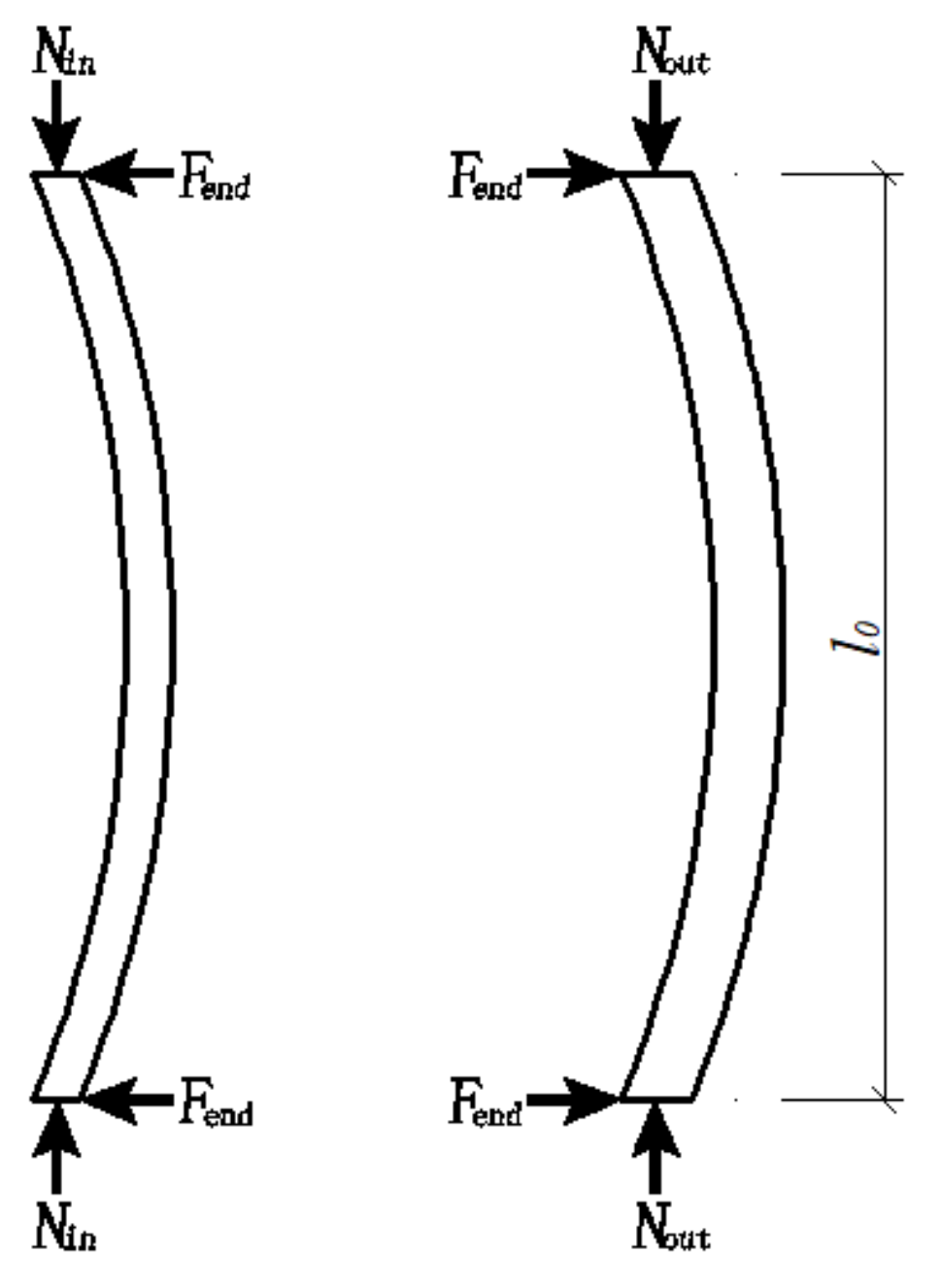
4.1. Derivation of Lateral Buckling Axial Force Formula
- is the number of centralizers in the imperfection segment;
- is the axial force of the inner pipe;
- is the axial force of the outer pipe;
- is the frictional coefficient between the centering ring and outer pipe;
- is the axial frictional coefficient between the outer pipe and seabed;
- is the lateral frictional coefficient between the outer pipe and seabed;
- is the underwater self-weight of the PIP structure.
4.2. Formula Verification
5. Summary and Conclusions
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| pipe-in-pipe system | PIP structure |
| Initial wavelength (mm) | |
| Initial amplitude (mm) | |
| Initial horizontal imperfection (mm) | |
| E | Elasticity modulus (MPa) |
| I | Cross-sectional moments of inertia ( |
| Diameter of inner pipe (mm) | |
| Diameter of outer pipe (mm) | |
| Wall thickness (mm) | |
| Poisson’s ratio | |
| Linear expansion coefficient (/°C) | |
| The frictional coefficient between the centering ring and outer pipe | |
| The axial frictional coefficient between the outer pipe and seabed | |
| The lateral frictional coefficient between the outer pipe and seabed | |
| W | Underwater mass (KN/mm) |
| Critical axial force | |
| λ | Length factor |
| n | The number of centralizers |
| The axial force of the inner pipe | |
| The axial force of the outer pipe |
References
- Wang, Z.; Chen, Z.; Liu, H. On lateral buckling of subsea pipe-in-pipe systems. Int. J. Steel Struct. 2015, 15, 881–892. [Google Scholar] [CrossRef]
- Sriskandarajah, T.; Anurudran, G.; Ragupathy, P.; Wilkins, R. Design Considerations in the Use of Pipe-In-Pipe Systems for Hp/Ht Subsea Pipelines. In Proceedings of the Ninth International Offshore and Polar Engineering Conference, Brest, France, 30 May–4 June 1999. [Google Scholar]
- Wang, Z.; Ma, K.; Chen, Z.; Liu, H.; Wang, X.; Zhao, S. Overview of global buckling of deep-sea pipeline. Tianjin Daxue Xuebao 2014, 47, 17–23. [Google Scholar]
- Cumming, G.; Rathbone, A. Euler Buckling of Idealised Horizontal Pipeline Imperfections. In Proceedings of the International Conference on Ocean, Offshore and Arctic Engineering, ASME 2010, Istanbul, Turkey, 12–14 July 2010; pp. 293–300. [Google Scholar]
- Xia, X.L.H.Z. Local Buckling Behavior and Plastic Deformation Capacity of High-Strength Pipe at Strike-Slip Local Buckling Behavior and Plastic Deformation Capacity of High-Strength Pipe at Strike-Slip Fault Crossing. Metals 2018, 8, 22. [Google Scholar]
- Bo̸Rsheim, S.G.O.F. Global Buckling of Pipe-in-Pipe: Structural Response and Design Criteria. In Proceedings of the 30th International Conference on Ocean, ASME, Rotterdam, The Netherlands, 19–24 June 2011; pp. 777–784. [Google Scholar]
- Tianfeng, Z.; Menglan, D.; Xiaodong, P. Lateral buckling performances of untrenched HT PIP systems. In Proceedings of the Seventeenth International Offshore and Polar Engineering Conference, Lisbon, Portugal, 1–6 July 2007. [Google Scholar]
- Vaz, M.A.; Patel, M.H. Lateral buckling of bundled pipe systems. Mar. Struct. 1999, 12, 21–40. [Google Scholar] [CrossRef]
- Allan, T. One-way buckling of a compressed strip under lateral loading. Arch. J. Mech. Eng. Sci. 1968, 10, 175–181. [Google Scholar] [CrossRef]
- Zeng, X.G.; Duan, M.L.; Che, X.Y. Analysis on upheaval buckling of buried subsea PIP pipeline. Ocean Eng. 2014, 32, 312–322. [Google Scholar]
- Maltby, T.C.; Calladine, C.R. An investigation into upheaval buckling of buried pipelines—II. Theory and analysis of experimental observations. Int. J. Mech. Sci. 1995, 37, 965–983. [Google Scholar] [CrossRef]
- Taylor, N.; Tran, V. Experimental and theoretical studies in subsea pipeline buckling. Mar. Struct. 1996, 9, 211–257. [Google Scholar] [CrossRef]
- Ommundsen, M.L. Upheaval Buckling of Buried Pipelines. Master’s Thesis, University of Stavanger, Stavanger, Norway, 2011. [Google Scholar]
- Karampour, H.; Alrsai, M.; Albermani, F.; Guan, H.; Jeng, D.S.; Asce, M. Propagation Buckling in Subsea Pipe-in-Pipe Systems. J. Eng. Mech. 2017, 143, 4017113. [Google Scholar] [CrossRef]
- Alrsai, M.; Karampour, H.; Albermani, F. Numerical study and parametric analysis of the propagation buckling behaviour of subsea pipe-in-pipe systems. Thin-Walled Struct. 2018, 125, 119–128. [Google Scholar] [CrossRef]
- Walbridge, S.; Beaulieu, D.; Mazzolani, F.M. Recent Development of Codes for Design of Aluminum Structures in Canada. Key Eng. Mater. 2016, 710, 451–457. [Google Scholar]
- Arjomandi, K.; Taheri, F. Bending capacity of sandwich pipes. Ocean Eng. 2012, 48, 17–31. [Google Scholar] [CrossRef]
- Simulia, D. Abaqus 6.11 analysis user’s manual. Abaqus 2011, 6, 22. [Google Scholar]
- American Petroleum Institute. API Recommended Practice for Planning, Designing, and Constructing Fixed Offshore Platforms; American Petroleum Institute: Washington, DC, USA, 1977. [Google Scholar]
- Liu, X.X.; Jia, X.; Zou, X. An Axial Force Analysis of High-temperature Subsea Pipe-in-pipe. Pipeline Tech. Equip. 2013, 4, 1–3. [Google Scholar]
- Wang, X.; Guo, Y.; Jiang, Z. Behavior and design method of pinned-pinned buckling-restrained brace. J. Build. Struct. 2013, 34, 97–106. [Google Scholar]
- Zhe, W.; Chen, Z.; He, Y.; Liu, H. Numerical Study on Lateral Buckling of Fully Bonded Sandwich Pipes. Int. J. Steel Struct. 2017, 17, 863–875. [Google Scholar]
- Zhao, X.; He, B.J. Effects of architectural shapes on surface wind pressure distribution: case studies of oval-shaped tall buildings. J. Build. Eng. 2017, 12, 219–228. [Google Scholar]
- Wang, Z.; Chen, Z.; Liu, H. Numerical study on upheaval buckling of pipe-in-pipe systems with full contact imperfections. Eng. Struct. 2015, 99, 264–271. [Google Scholar] [CrossRef]
- Mu, L.; Zhang, Q.; Li, Q.; Zeng, F.; Sciubba, E. A Comparison of Thermal Models for Temperature Profiles in Gas-Lift Wells. Energies 2018, 11, 489. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Alloy Designation | Young’s Modulus (GPa) | Poisson’s Ratio | Thermal Expansion Coefficient (mm/°C) |
|---|---|---|---|
| 6061-T6 | 69.82 | 0.3 | 1.881 × 10−5 |
| Group | Specimen No. | Wavelength l0 | |
|---|---|---|---|
| Group I | S1-1000-20 | 000 | 20 |
| S2-1000-30 | 000 | 30 | |
| S3-1000-40 | 000 | 40 | |
| Group II | S4-2000-20 | 2000 | 20 |
| S5-2000-30 | 2000 | 30 | |
| S6-2000-40 | 2000 | 40 | |
| Group III | S7-4000-40 | 4000 | 40 |
| S8-4000-60 | 4000 | 60 | |
| S9-4000-80 | 4000 | 80 |
| Specimen No. | Critical axial force (N) | Critical temperature difference (°C) | Critical displacement (mm) |
|---|---|---|---|
| S1-1000-20 | −1251.8 | 56.6 | 118.3 |
| S2-1000-30 | −943.4 | 55.6 | 115.3 |
| S3-1000-40 | −899.6 | 52.6 | 110.6 |
| S4-2000-20 | −760.2 | 45.2 | 78.5 |
| S5-2000-30 | −550.1 | 43.5 | 70.2 |
| S6-2000-40 | −510.9 | 40.2 | 48.7 |
| S7-4000-40 | −417.2 | 35.7 | 22.3 |
| S8-4000-60 | −333.3 | 32.2 | 20.3 |
| S9-4000-80 | −270.6 | 22.5 | 18.4 |
| Diameter (D) (mm) | 62 |
|---|---|
| Diameter (d) (mm) | 36 |
| Wall thickness(t) (mm) | 3 |
| Elasticity modulus(E) (MPa) | 68,000 |
| Poisson’s ratio(δ) | 0.3 |
| Linear expansion coefficient(α)(/°C) | 1.73 × 10−5 |
| Underwater mass(W) (KN/mm) | 300 |
| Pipe–seabed frictional coefficient) | 0.3 |
| Temperature difference (°C) | 100 |
| Specimen No. | Experimental Value N | FE Value (N) | Theoretical Value (N) | Experimental to Theoretical Error % | FE to Theoretical Error % |
|---|---|---|---|---|---|
| S1-1000-20 | −1251.8 | −1021.1 | −1343.7 | 6.8 | 24.1 |
| S2-1000-30 | −943.4 | −973.2 | −1062.8 | 11.2 | 8.4 |
| S3-1000-40 | −899.6 | −865.7 | −976.4 | 7.8 | 11.3 |
| S4-2000-20 | −760.2 | −712.5 | −849.8 | 10.5 | 16.1 |
| S5-2000-30 | −550.1 | −630.8 | −686.4 | 19.8 | 8.1 |
| S6-2000-40 | −510.9 | −573.5 | −618.7 | 17.4 | 7.3 |
| S7-4000-40 | −417.2 | −475.3 | −534.2 | 21.91 | 11.0 |
| S8-4000-60 | −333.3 | −392.8 | −461.7 | 27.8 | 14.9 |
| S9-4000-80 | −270.6 | -312.7 | −352.7 | 23.2 | 11.3 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Z.; Liu, H.; Chen, Z. Lateral Buckling Theory and Experimental Study on Pipe-in-Pipe Structure. Metals 2019, 9, 185. https://doi.org/10.3390/met9020185
Zhang Z, Liu H, Chen Z. Lateral Buckling Theory and Experimental Study on Pipe-in-Pipe Structure. Metals. 2019; 9(2):185. https://doi.org/10.3390/met9020185
Chicago/Turabian StyleZhang, Zechao, Hongbo Liu, and Zhihua Chen. 2019. "Lateral Buckling Theory and Experimental Study on Pipe-in-Pipe Structure" Metals 9, no. 2: 185. https://doi.org/10.3390/met9020185
APA StyleZhang, Z., Liu, H., & Chen, Z. (2019). Lateral Buckling Theory and Experimental Study on Pipe-in-Pipe Structure. Metals, 9(2), 185. https://doi.org/10.3390/met9020185