
Seismic Collapse Risk Assessment of Braced Frames under Near-Fault Earthquakes


Abstract
:1. Introduction
2. Quantification of Seismic Collapse Risk of Braced Frames under Near-Fault Earthquakes
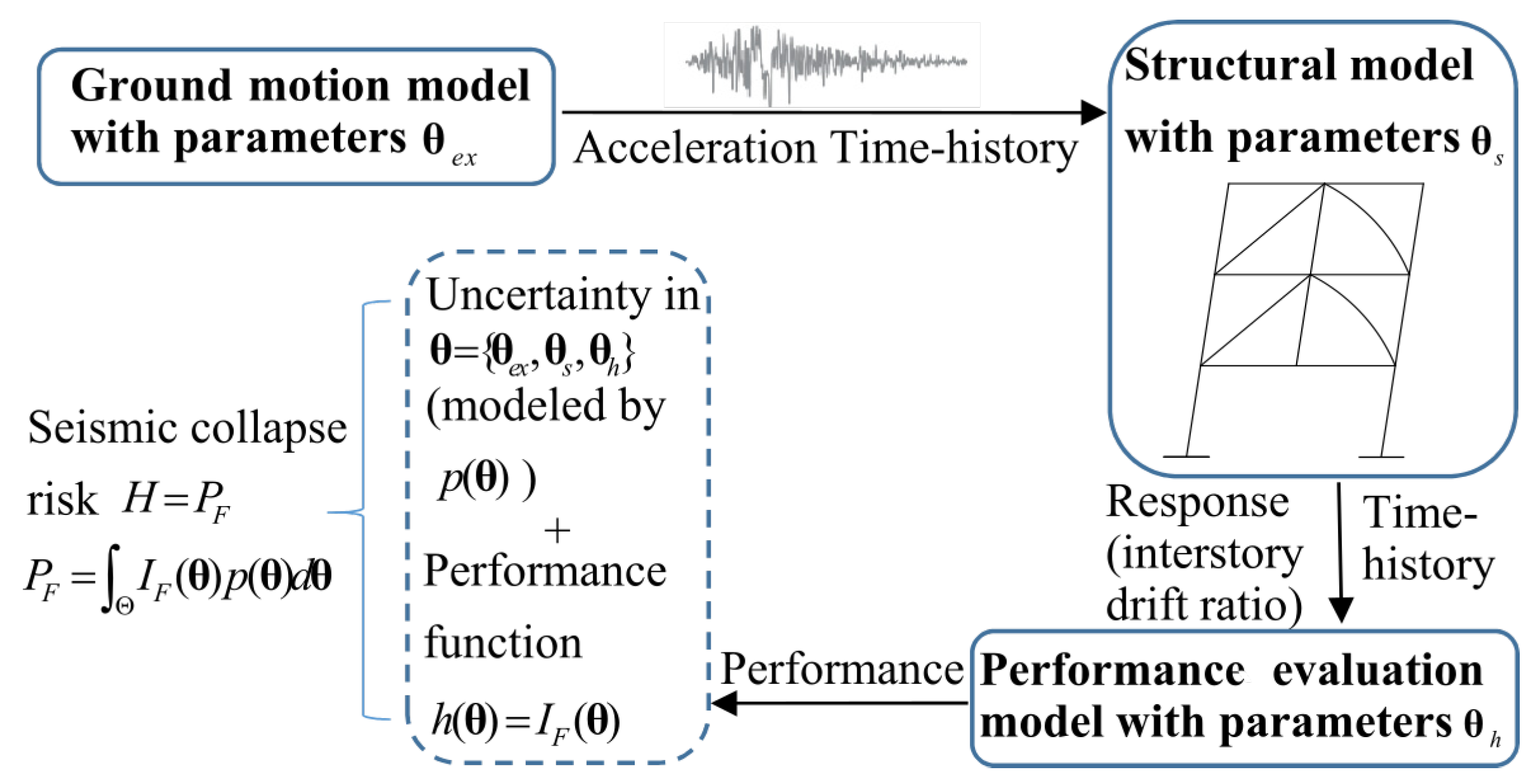
2.1. Simulation-Based Framework for Seismic Collapse Risk Quantification
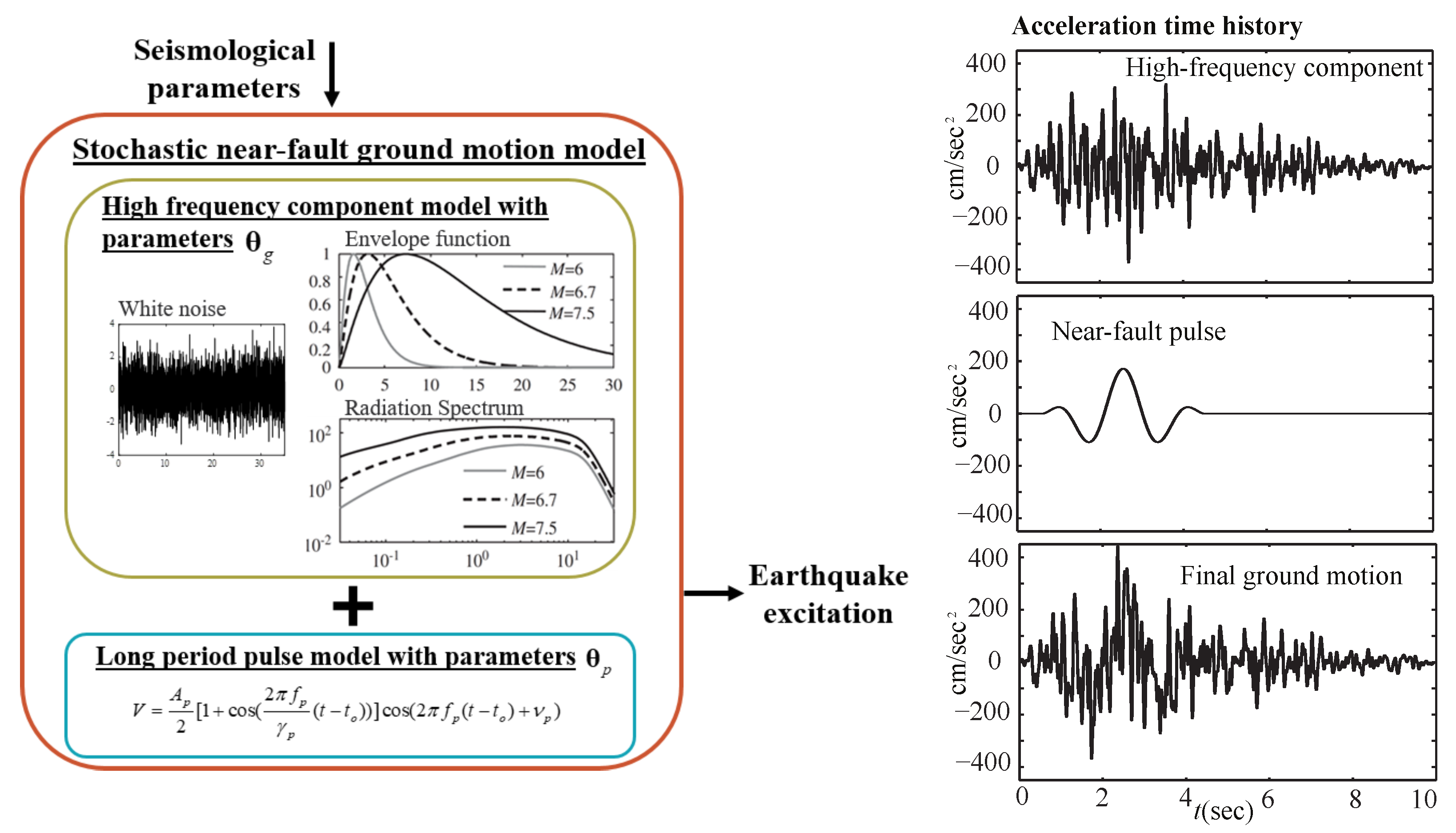
2.2. Stochastic Near-Fault Ground Motion Model
3. Seismic Collapse Risk Assessment and Sensitivity Analysis Using Efficient Simulation
3.1. Stochastic Simulation for Seismic Collapse Risk Assessment
3.2. Efficient Estimation of Conditional Seismic Collapse Risk
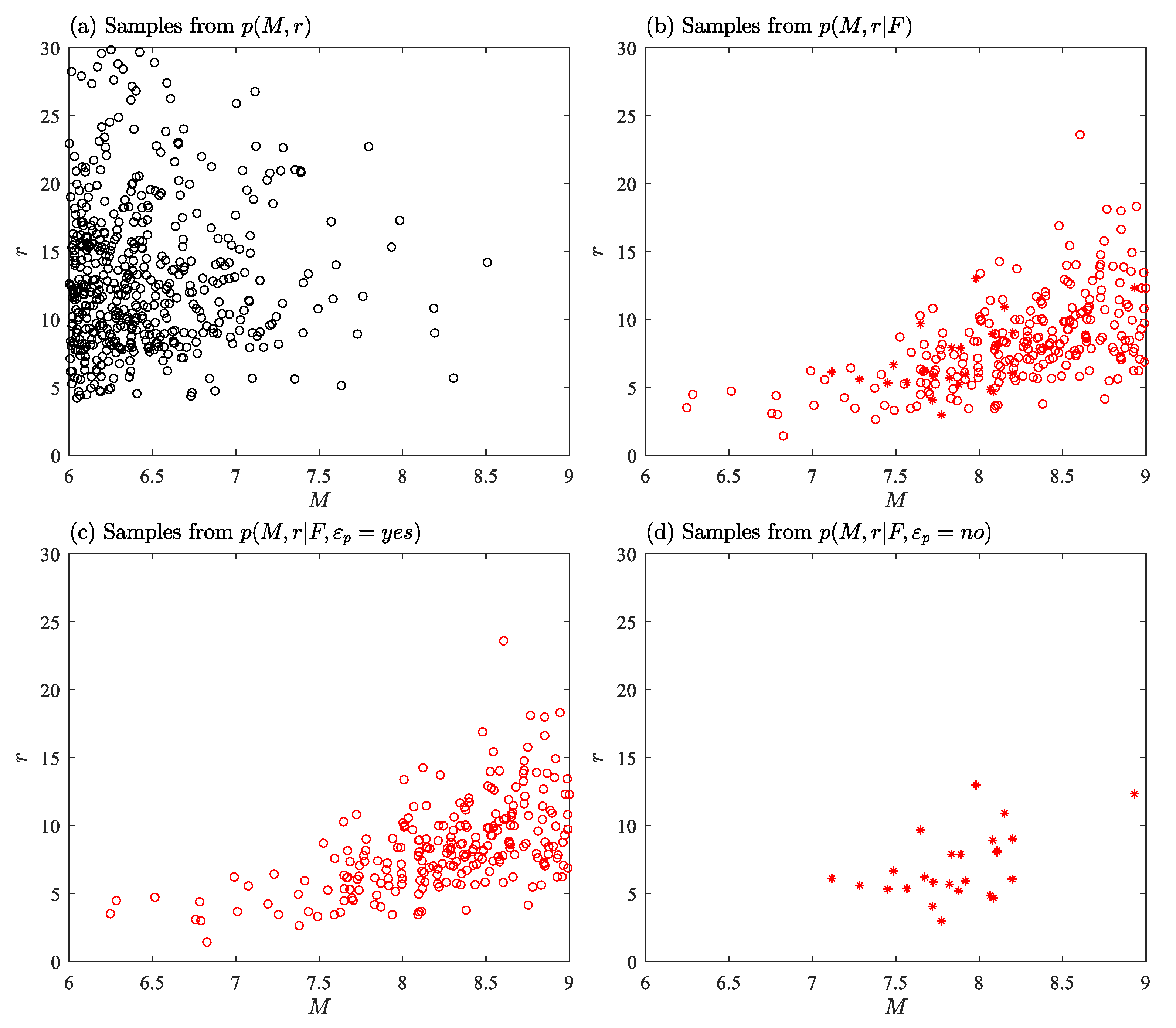
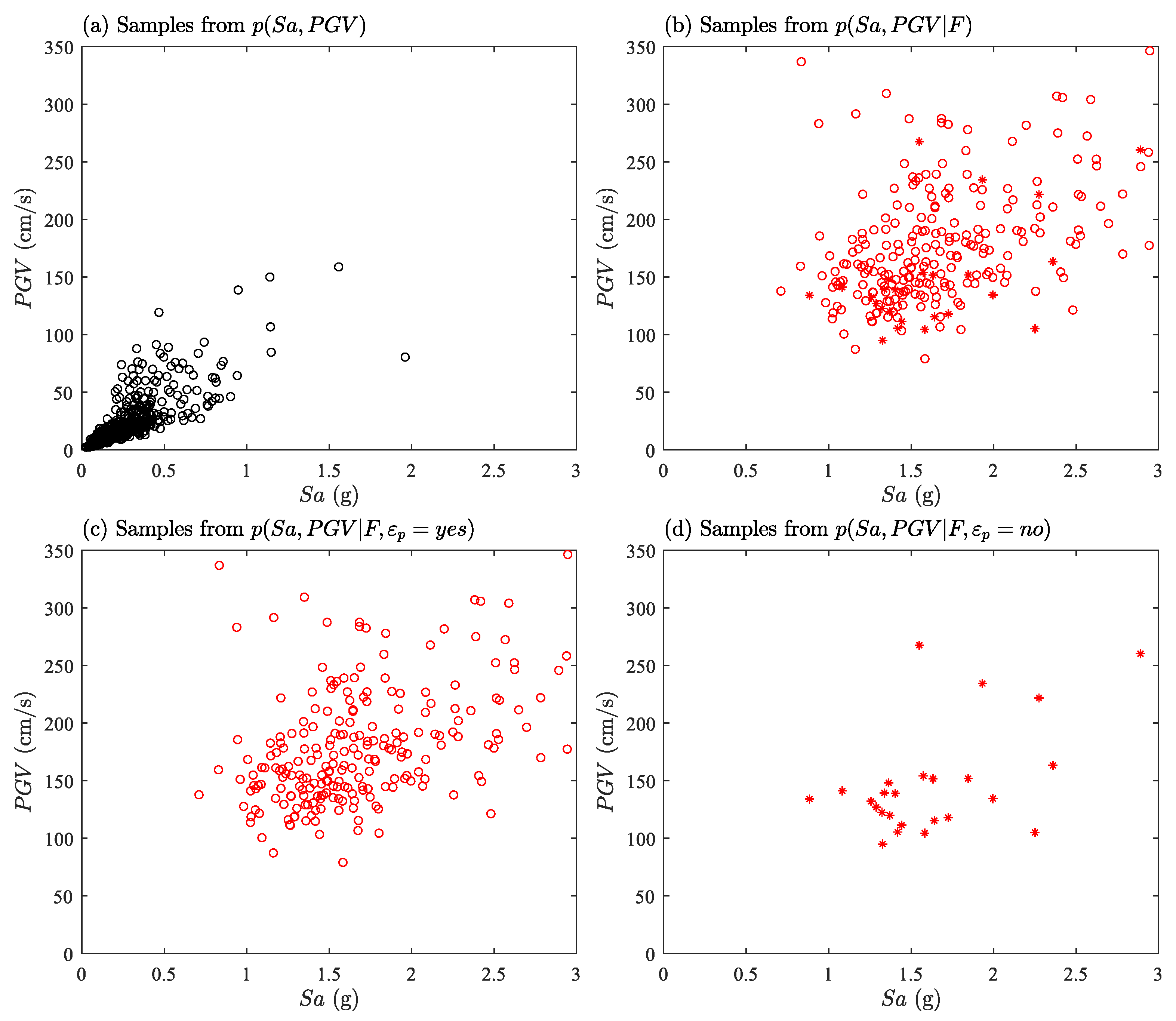
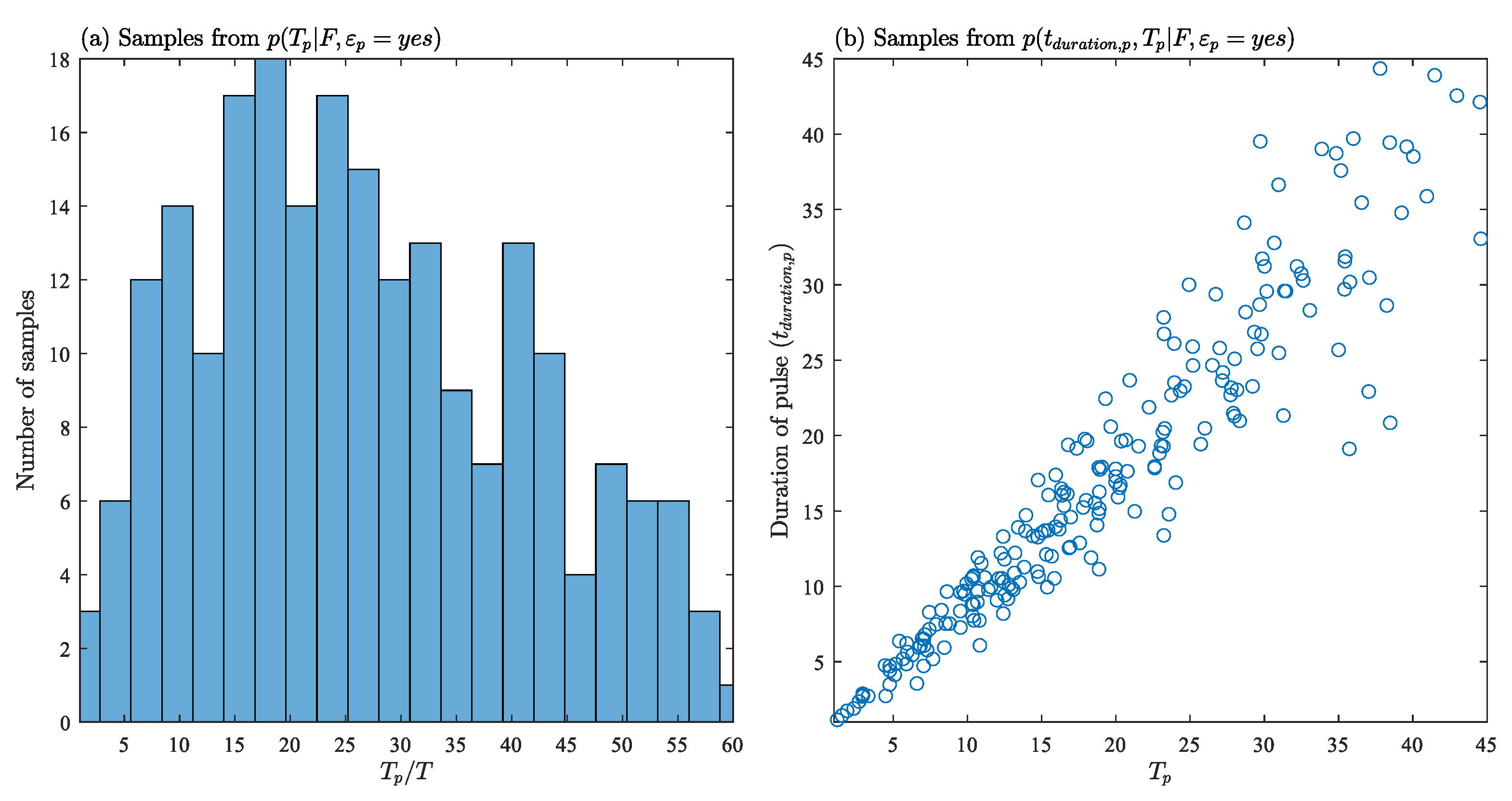
3.3. Probabilistic Sensitivity Analysis Using Sample-Based Approach
4. Illustrative Example
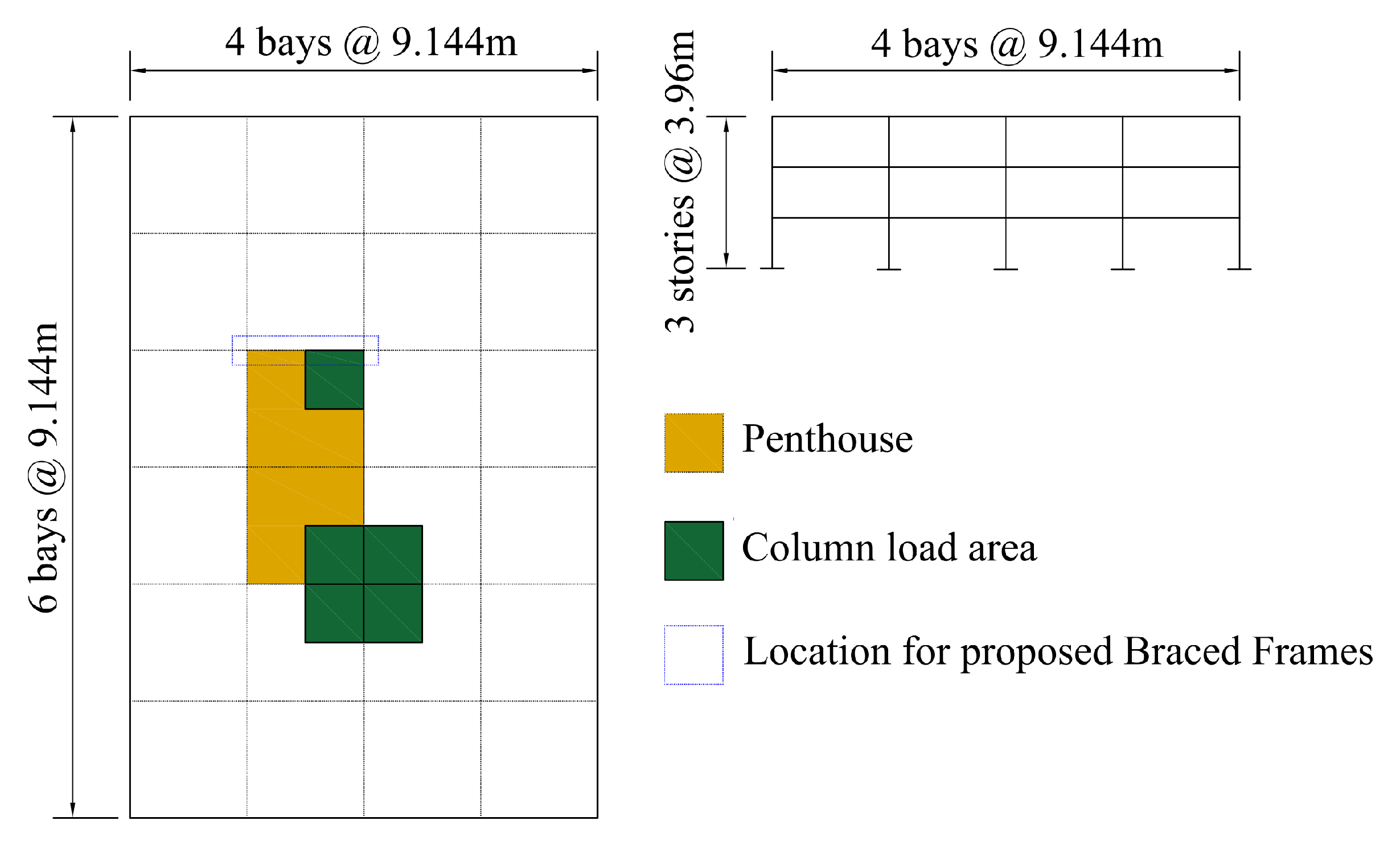
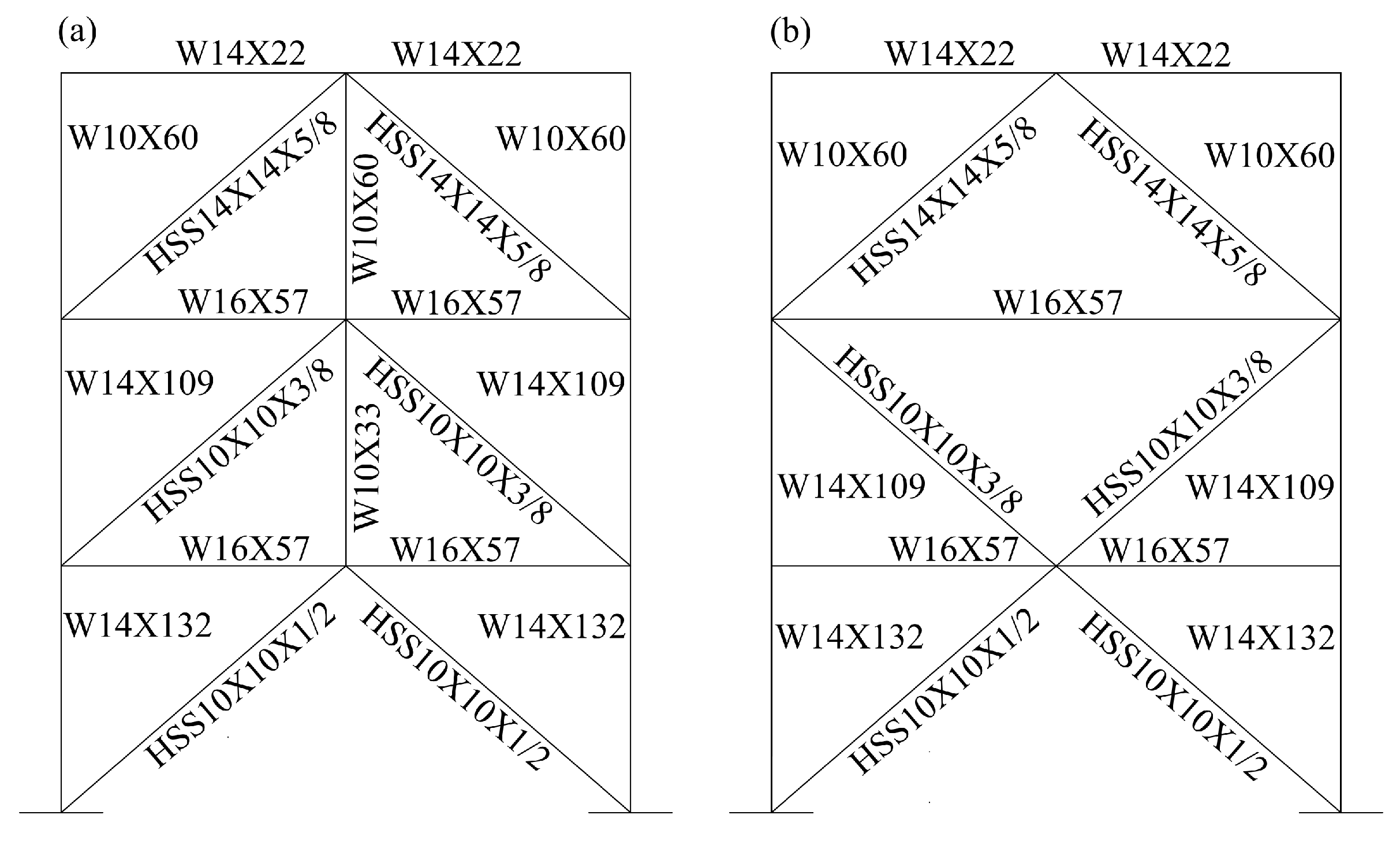
4.1. The Example Braced Frames
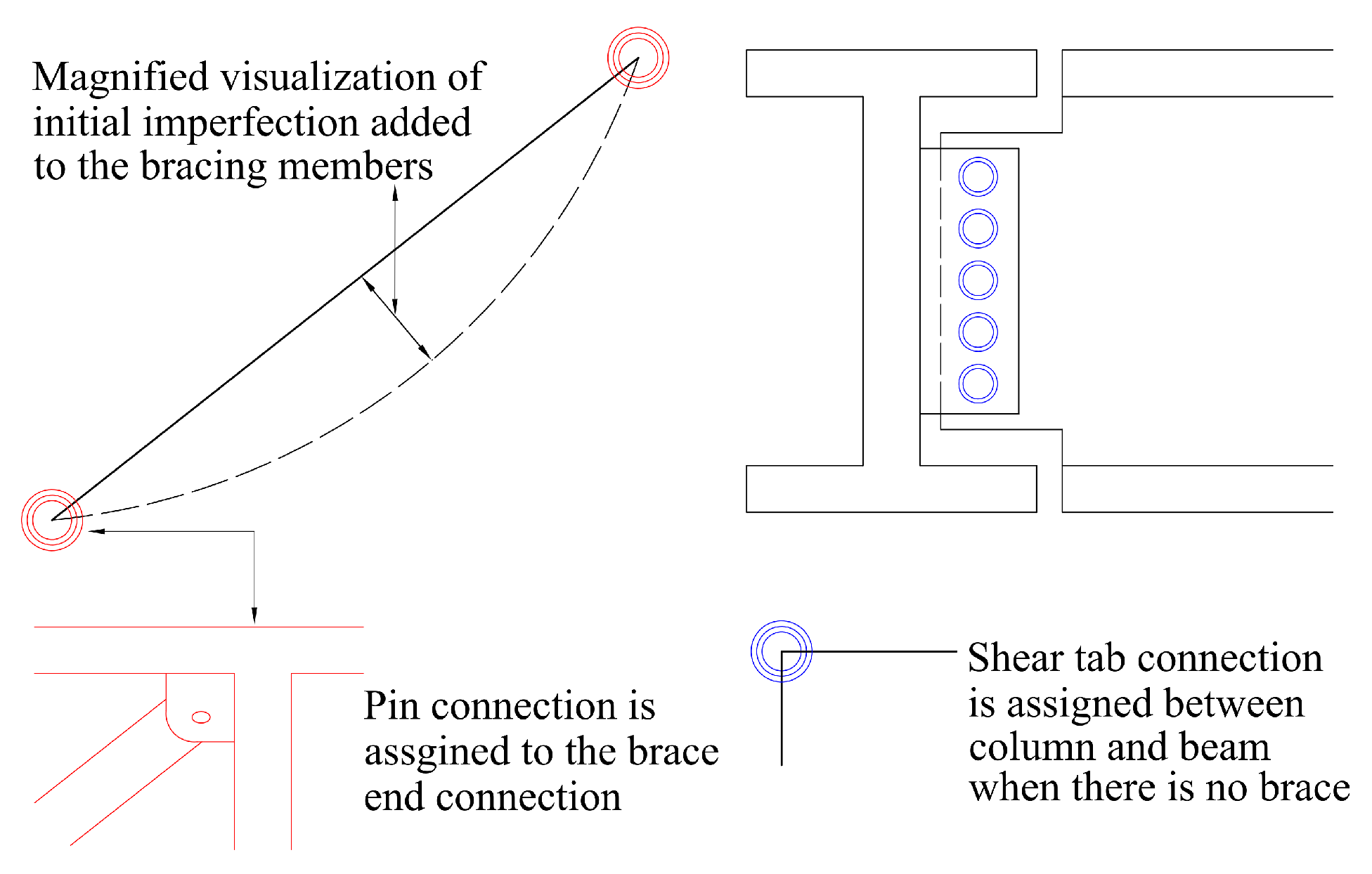
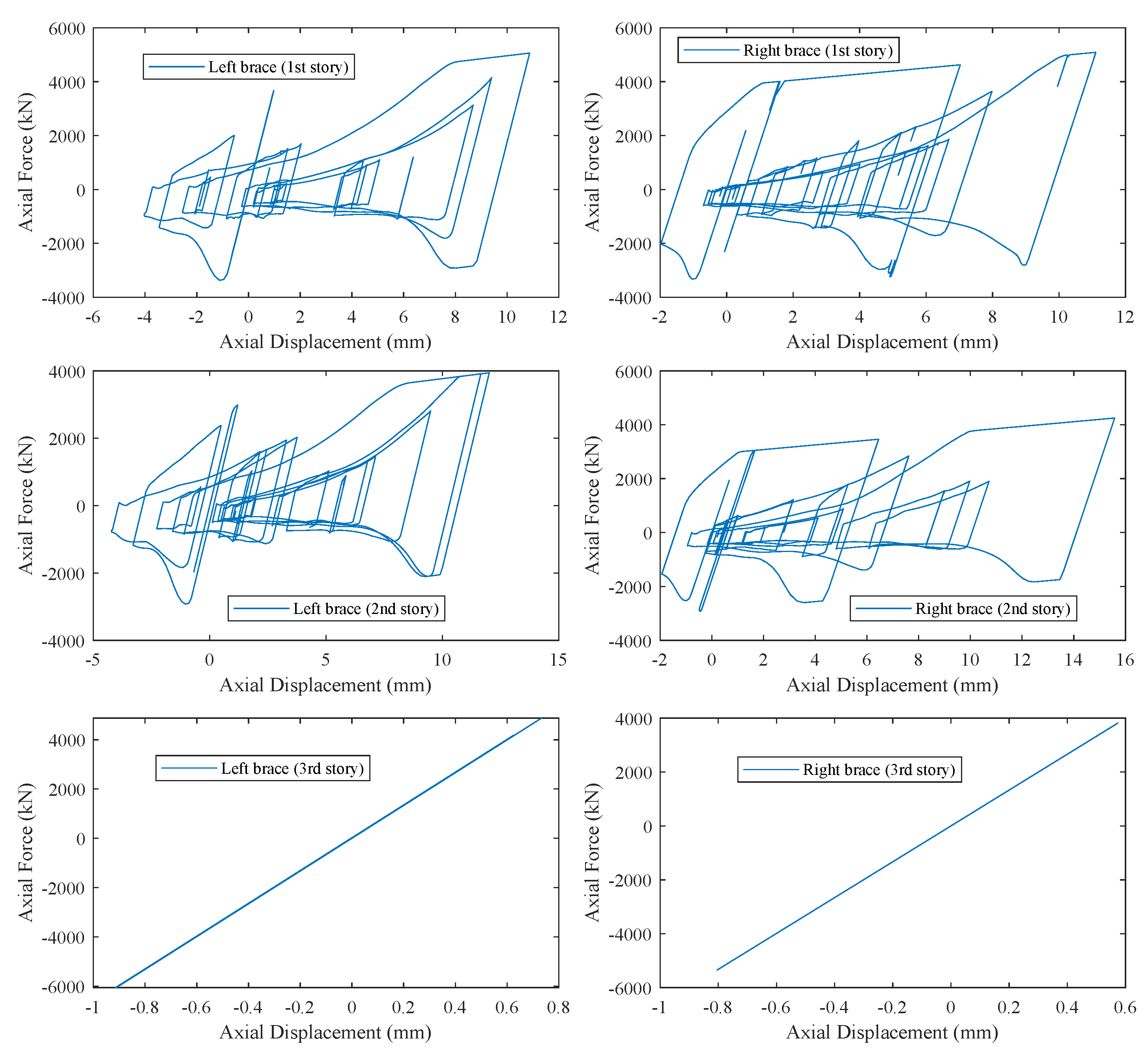
4.2. Numerical Modeling of the Example Braced Frames
4.3. Implementation Details of the Simulation-Based Assessment of Seismic Collapse Risk
5. Results and Discussions
5.1. Seismic Collapse Risk Assessment Results
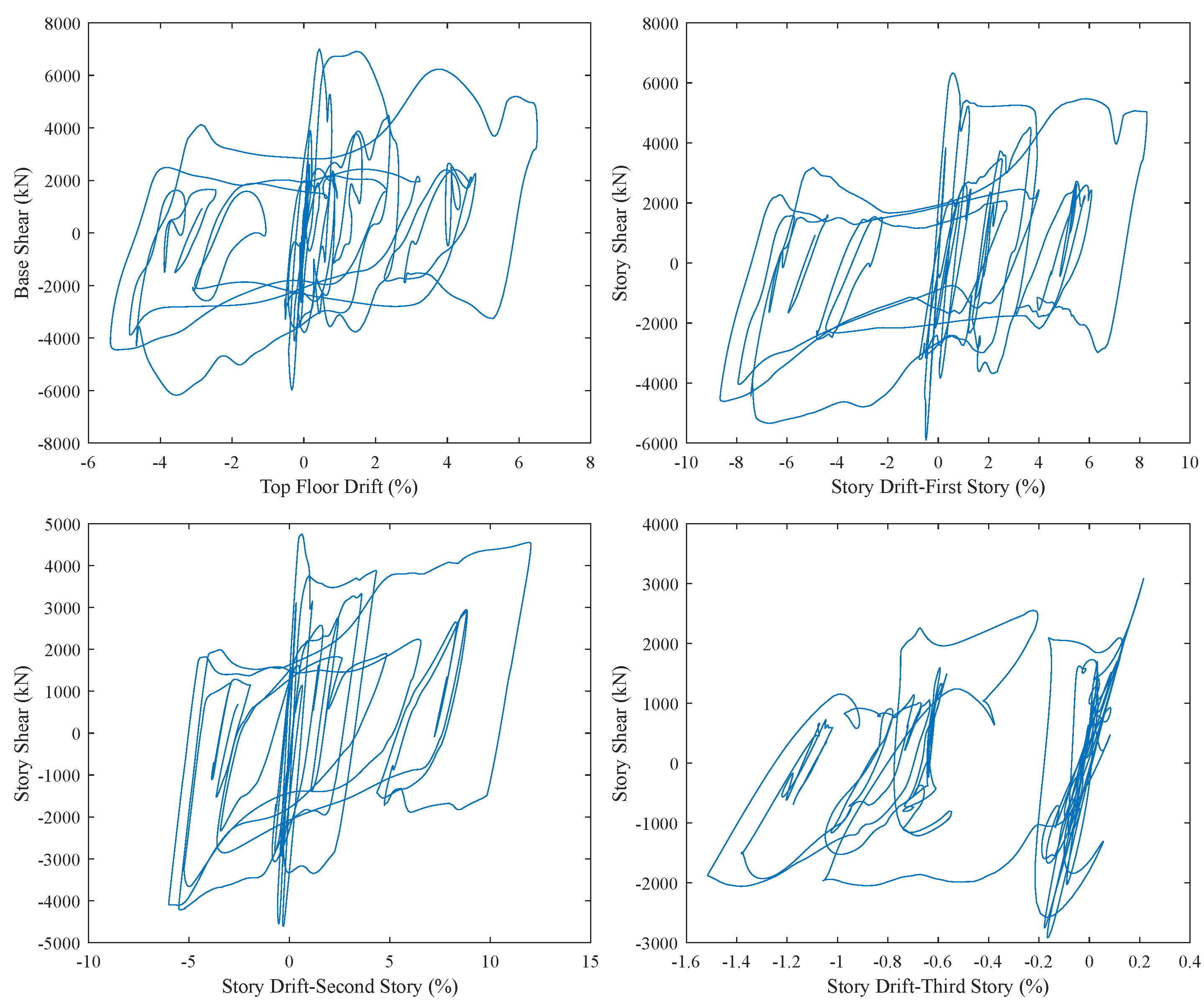
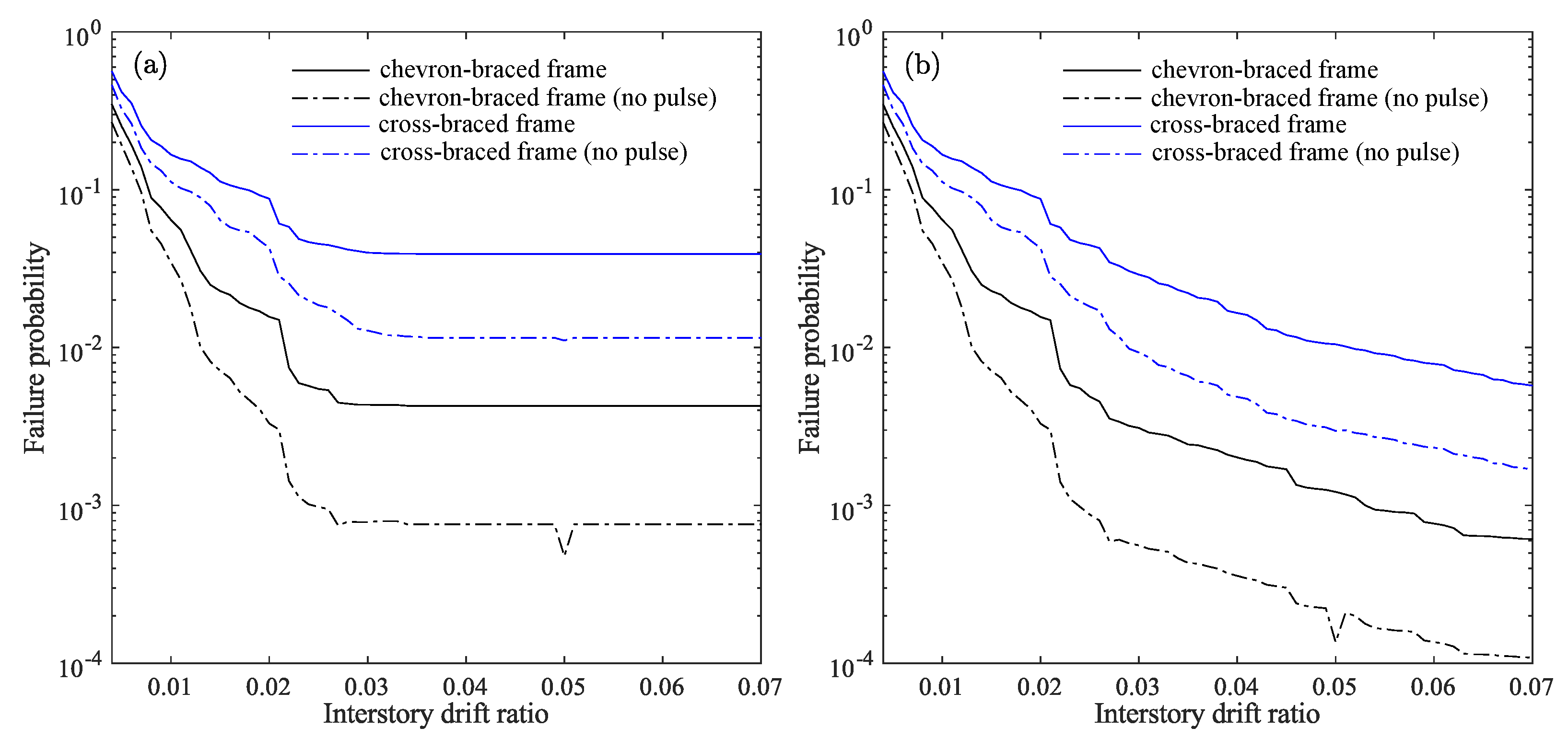
5.1.1. Chevron-Braced Frame
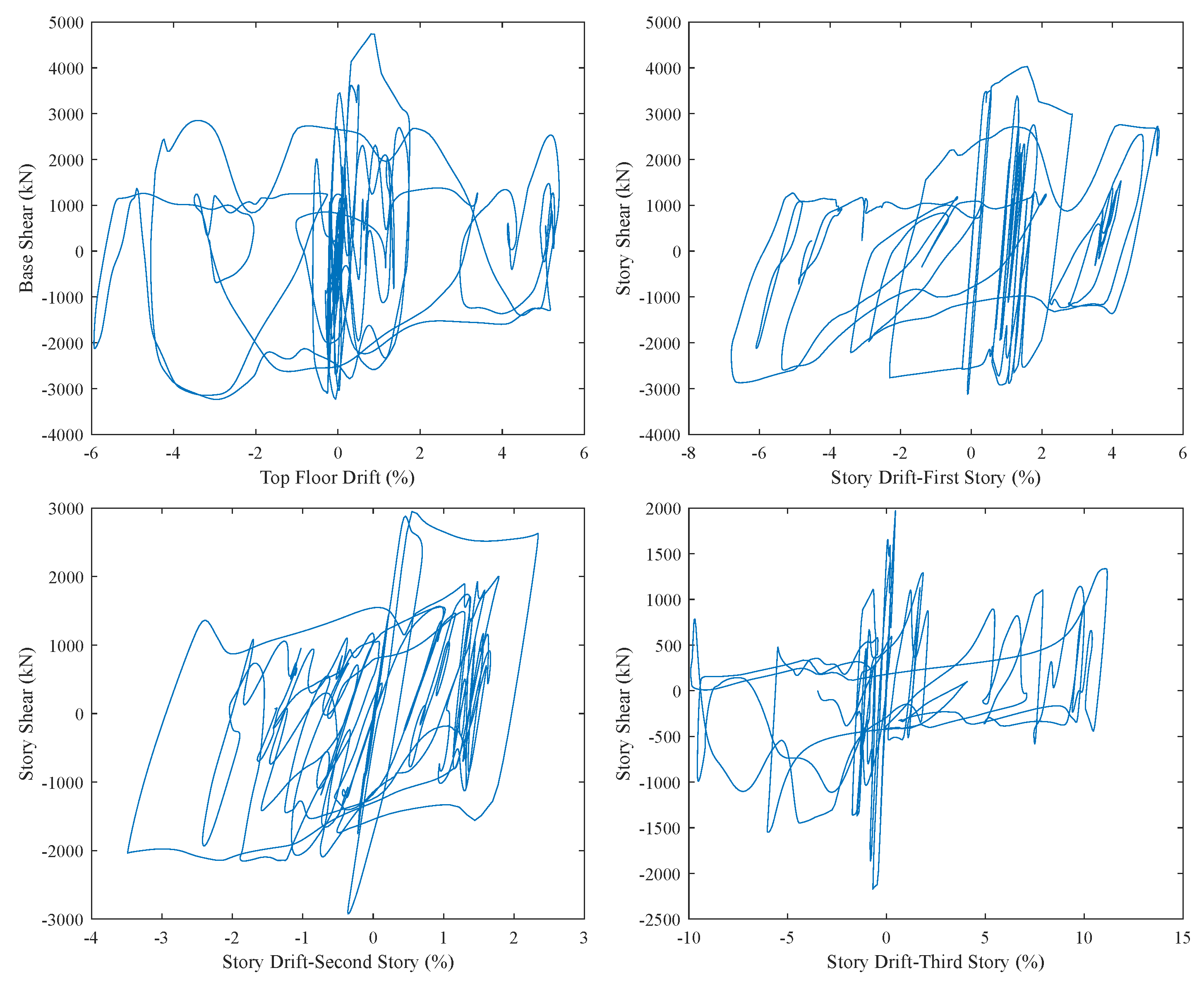
5.1.2. Cross-Braced Frame
5.1.3. Comparison between the Two Braced Frames
5.2. Probabilistic Sensitivity Analysis Results
5.2.1. Chevron-Braced Frame
5.2.2. Cross-Braced Frame
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A. Stochastic Near-Fault Ground Motion Model
Appendix A.1. High-Frequency Component
Appendix A.2. Long-Period Pulse
References
- Comartin, C.D.; Niewiarowski, R.W.; Freeman, S.A.; Turner, F.M. Seismic evaluation and retrofit of concrete buildings: A practical overview of the ATC 40 Document. Earthq. Spectra 2000, 16, 241–261. [Google Scholar] [CrossRef]
- FEMA. Improvement of Nonlinear Static Seismic Analysis Procedures; Technical Report 440; Federal Emergency Management Agency: Washington, DC, USA, 2005.
- FEMA. Techniques for the Seismic Rehabilitation of Existing Buildings; Technical Report 547; Federal Emergency Management Agency: Washington, DC, USA, 2006.
- Chen, C.H. Performance-Based Seismic Demand Assessment of Concentrically Braced Steel Frame Buildings. Ph.D. Thesis, University of California, Berkeley, CA, USA, 2012. [Google Scholar]
- Sabelli, R.; Roeder, C.W.; Hajjar, J.F. Seismic Design of Steel Special Concentrically Braced Frame Systems—A Guide for Practicing Engineers. In NEHRP Seismic Design Technical Brief; NIST: Gaithersburg, MA, USA, 2013; pp. 1–36. [Google Scholar]
- Liel, A.B.; Haselton, C.B.; Deierlein, G.G. Seismic Collapse Safety of Reinforced Concrete Buildings. II: Comparative Assessment of Nonductile and Ductile Moment Frames. J. Struct. Eng. 2011, 137, 492–502. [Google Scholar] [CrossRef]
- Astaneh-Asl, A.; Cochran, M.; Sabelli, R. Seismic detailing of gusset plates for special concentrically braced frames. In Structural Steel Educational Council; Steel TIPS: Moraga, CA, USA, 2006. [Google Scholar]
- Roeder, C.W.; Lehman, D.E.; Lumpkin, E.; Palmer, K. SCBF Gusset Plate Connection Design. In Proceedings of the North American Structural Steel Construction Conference, Pittsburgh, PA, USA, 10–14 May 2011. [Google Scholar]
- Roeder, C.W.; Lumpkin, E.J.; Lehman, D.E. A balanced design procedure for special concentrically braced frame connections. J. Constr. Steel Res. 2011, 67, 1760–1772. [Google Scholar] [CrossRef]
- Hsiao, P.C.; Lehman, D.E.; Roeder, C.W. Improved analytical model for special concentrically braced frames. J. Constr. Steel Res. 2012, 73, 80–94. [Google Scholar] [CrossRef]
- Palmer, K.D. Seismic Behavior, Performance and Design of Steel Concentrically Braced Frame Systems. Ph.D. Thesis, University of Washington, Seattle, WA, USA, 2012. [Google Scholar]
- Hammad, A. Seismic Behavior of Special Concentric Braced Frames under Long Duration Ground Motions. Ph.D. Thesis, University of Nevada, Reno, NV, USA, 2019. [Google Scholar]
- Vafaei, D.; Shemshadian, M.; Zahrai, S. Seismic behavior of BRB frames under near fault excitations. In Proceedings of the 9th US National and 10th Canadian Conference on Earthquake Engineering, Toronto, ON, Canada, 25–29 July 2010. [Google Scholar]
- Alavi, B.; Krawinkler, H. Behavior of moment-resisting frame structures subjected to near-fault ground motions. Earthq. Eng. Struct. Dyn. 2004, 33, 687–706. [Google Scholar] [CrossRef]
- Liel, A.B.; Haselton, C.B.; Deierlein, G.G.; Baker, J.W. Incorporating modeling uncertainties in the assessment of seismic collapse risk of buildings. Struct. Saf. 2009, 31, 197–211. [Google Scholar] [CrossRef]
- Taflanidis, A.A.; Jia, G. A simulation-based framework for risk assessment and probabilistic sensitivity analysis of base-isolated structures. Earthq. Eng. Struct. Dyn. 2011, 40, 1629–1651. [Google Scholar] [CrossRef]
- Liel, A.B.; Deierlein, G.G. Using Collapse Risk Assessments to Inform Seismic Safety Policy for Older Concrete Buildings. Earthq. Spectra 2012, 28, 1495–1521. [Google Scholar] [CrossRef]
- Champion, C.; Liel, A.B. The effect of near-fault directivity on building seismic collapse risk. Earthq. Eng. Struct. Dyn. 2012, 41, 1391–1409. [Google Scholar] [CrossRef]
- Jia, G.; Gidaris, I.; Taflanidis, A.A.; Mavroeidis, G.P. Reliability-based assessment/design of floor isolation systems. Eng. Struct. 2014, 78, 41–56. [Google Scholar] [CrossRef]
- Vamvatsikos, D.; Cornell, C.A. The incremental dynamic analysis and its application to performance-based earthquake engineering. In Proceedings of the 12th European Conference on Earthquake Engineering, London, UK, 9–13 September 2002. [Google Scholar]
- Vamvatsikos, D.; Cornell, C.A. Direct estimation of seismic demand and capacity of multidegree-of-freedom systems through incremental dynamic analysis of single degree of freedom approximation. J. Struct. Eng. 2005, 131, 589–599. [Google Scholar] [CrossRef] [Green Version]
- Song, R.; Li, Y.; van de Lindt, J.W. Impact of earthquake ground motion characteristics on collapse risk of post-mainshock buildings considering aftershocks. Eng. Struct. 2014, 81, 349–361. [Google Scholar] [CrossRef]
- Li, Y.; Song, R.; Van De Lindt, J.W. Collapse fragility of steel structures subjected to earthquake mainshock-aftershock sequences. J. Struct. Eng. 2014, 140, 1–10. [Google Scholar] [CrossRef]
- Mavroeidis, G.; Papageorgiou, A. A mathematical representation of near-fault ground motions. Bull. Seismol. 2003, 93, 1099–1131. [Google Scholar] [CrossRef]
- Shahi, S.K.; Baker, J.W. An empirically calibrated framework for including the effects of near-fault directivity in probabilistic seismic hazard analysis. Bull. Seismol. Soc. Am. 2011, 101, 742–755. [Google Scholar] [CrossRef]
- Robert, C.P.; Casella, G. Monte Carlo Statistical Methods, 2nd ed.; Springer: New York, NY, USA, 2004. [Google Scholar]
- Au, S.K.; Beck, J.L. Estimation of small failure probabilities in high dimensions by subset simulation. Probabilistic Eng. Mech. 2001, 16, 263–277. [Google Scholar] [CrossRef] [Green Version]
- Jia, G.; Taflanidis, A.A.; Beck, J.L. A new adaptive rejection sampling method using kernel density approximations and its application to Subset Simulation. ASCE ASME J. Risk Uncertain. Eng. Syst. Part A Civ. Eng. 2017, 3, D4015001. [Google Scholar] [CrossRef]
- Jia, G.; Tabandeh, A.; Gardoni, P. A density extrapolation approach to estimate failure probabilities. Struct. Saf. 2021, 93, 102128. [Google Scholar] [CrossRef]
- Karunamuni, R.; Zhang, S. Some improvements on a boundary corrected kernel density estimator. Stat. Probab. Lett. 2008, 78, 499–507. [Google Scholar] [CrossRef]
- Jia, G.; Taflanidis, A.A. Sample-based evaluation of global probabilistic sensitivity measures. Comput. Struct. 2014, 144, 103–118. [Google Scholar] [CrossRef]
- FEMA. State of the Art Report on Systems Performance of Steel Moment Frames Subject to Earthquake Ground Shaking; Technical Report 355; Federal Emergency Management Agency: Washington, DC, USA, 2000.
- Rafn Gunnarsson, I. Numerical Performance Evaluation of Braced Frame Systems. Master’s Thesis, University of Washington, Seattle, WA, USA, 2004. [Google Scholar]
- Bruneau, M.; Uang, C.M.; Sabelli, R. Ductile Design of Steel Structures, 2nd ed.; McGraw Hill Education: New York, NY, USA, 2011. [Google Scholar]
- Khatib, I.F.; Mahin, S.A.; Pister, K.S. Seismic Behavior of Concentrically Braced Steel Frames; Technical Report, UCB/EERC-88/01; University of California: Berkeley, CA, USA, 1988. [Google Scholar]
- Leon, R.T.; Yang, C.S. Special inverted-V-braced frames with suspended zipper struts. In Proceedings of the International Workshop on Steel and Concrete Composite Construction, Taipei, Taiwan, 8–9 October 2003. [Google Scholar]
- Yang, C.S. Analytical and Experimental Study of Concentrically Braced Frames with Zipper Struts. Ph.D. Thesis, Georgia Institute of Technology, Atlanta, GA, USA, 2006. [Google Scholar]
- Elnashai, A.; Papanikolaou, V.; Lee, D. Zeus NL—A System for Inelastic Analysis of Structures; Technical Report; Mid-America Earthquake Center, University of Illinois at Urbana-Champaign: Champaign, IL, USA, 2004. [Google Scholar]
- Karamanci, E.; Lignos, D.G. Computational approach for collapse assessment of concentrically braced frames in seismic regions. J. Struct. Eng. 2014, 140, A4014019. [Google Scholar] [CrossRef]
- Terzic, V. Discovering OpenSees—Modeling SCB Frames Using Beam-Column Elements; Open System for Earthquake Engineering Simulation: Berkeley, CA, USA, 2013. [Google Scholar]
- Uriz, P.; Mahin, S.A. Seismic performance assessment of concentrically braced steel frames. In Proceedings of the 13th World Conference on Earthquake Engineering, Vancouver, BC, Canada, 1–6 August 2004; p. 6. [Google Scholar]
- Uriz, P. Towards Earthquake Resistant Design of Concentrically Braced Steel Structures; University of California: Berkeley, CA, USA, 2005. [Google Scholar]
- Hsiao, P.C.; Lehman, D.E.; Roeder, C.W. A model to simulate special concentrically braced frames beyond brace fracture. Earthq. Eng. Struct. Dyn. 2013, 42, 183–200. [Google Scholar] [CrossRef]
- Tirca, L.; Chen, L. Numerical simulation of inelastic cyclic response of HSS braces upon fracture. Adv. Steel Constr. 2014, 10, 442–462. [Google Scholar]
- Wen, H.; Mahmoud, H. New Model for Ductile Fracture of Metal Alloys. I: Monotonic Loading. J. Eng. Mech. 2016, 142, 04015088. [Google Scholar] [CrossRef]
- Hammad, A.; Moustafa, M.A. Modeling sensitivity analysis of special concentrically braced frames under short and long duration ground motions. Soil Dyn. Earthq. Eng. 2020, 128, 105867. [Google Scholar] [CrossRef]
- Hammad, A.; Moustafa, M.A. Numerical analysis of special concentric braced frames using experimentally-validated fatigue and fracture model under short and long duration earthquakes. Bull. Earthq. Eng. 2021, 19, 287–316. [Google Scholar] [CrossRef]
- Atkinson, G.; Silva, W. Stochastic modeling of California ground motions. Bull. Seismol. Soc. Am. 2000, 90, 255–274. [Google Scholar] [CrossRef]
- Atkinson, G.M. Ground-motion prediction equations for eastern North America from a referenced empirical approach: Implications for epistemic uncertainty. Bull. Seismol. Soc. Am. 2008, 98, 1304–1318. [Google Scholar] [CrossRef]
- Vetter, C.; Taflanidis, A.A. Comparison of alternative stochastic ground motion models for seismic risk characterization. Soil Dyn. Earthq. Eng. 2014, 58, 48–65. [Google Scholar] [CrossRef]
- Vetter, C.; Taflanidis, A.A. Global sensitivity analysis for stochastic ground motion modeling in seismic-risk assessment. Soil Dyn. Earthq. Eng. 2012, 38, 128–143. [Google Scholar] [CrossRef]
- Boore, D.M. Simulation of Ground Motion Using the Stochastic Method. Pure Appl. Geophys. 2003, 160, 635–676. [Google Scholar] [CrossRef] [Green Version]
- Bray, J.D.; Rodriguez-Marek, A. Characterization of forward-directivity ground motions in the near-fault region. Soil Dyn. Earthq. Eng. 2004, 24, 815–828. [Google Scholar] [CrossRef]
- Halldórsson, B.; Mavroeidis, G.P.; Papageorgiou, A.S. Near-fault and far-field strong ground-motion simulation for earthquake engineering applications using the specific barrier model. J. Struct. Eng. 2010, 137, 433–444. [Google Scholar] [CrossRef]
- Gidaris, I.; Taflanidis, A.A. Performance assessment and optimization of fluid viscous dampers through life-cycle cost criteria and comparison to alternative design approaches. Bull. Earthq. Eng. 2015, 13, 1003–1028. [Google Scholar] [CrossRef]
- Wells, D.L.; Coppersmith, K.J. New empirical relationships among magnitude, rupture length, rupture width, rupture area, and surface displacement. Bull. Seismol. Soc. Am. 1994, 84, 974–1002. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Damage State | Chevron-Braced Frame | Cross-Braced Frame | ||
|---|---|---|---|---|
| ‘Slight’ | 34.73 | 26.63 | 56.16 | 45.99 |
| ‘Moderate’ | 8.89 | 5.50 | 20.65 | 14.64 |
| ‘Extensive’ | 0.55 | 0.10 | 4.54 | 1.86 |
| ‘Collapse’ | 0.43 | 0.05 | 3.92 | 1.11 |
| Independent Parameters | Relative Entropy | Resultant Parameters | Relative Entropy | ||
|---|---|---|---|---|---|
| M | 3.201 | 2.806 | 3.765 | 4.053 | |
| r | 0.481 | 0.279 | 3.051 | 3.129 | |
| 0.339 | 0.555 | 2.772 | 2.131 | ||
| 0.103 | 0.109 | 2.576 | 2.005 | ||
| 1.493 | e | 2.380 | 1.791 | ||
| 0.050 | 2.109 | ||||
| 0.003 | L | 1.721 | |||
| 3.853 | 3.286 | 0.445 | |||
| 3.074 | |||||
| 0.572 | |||||
| Independent Parameters | Relative Entropy | Resultant Parameters | Relative Entropy | ||
|---|---|---|---|---|---|
| M | 1.749 | 2.055 | 2.610 | 2.928 | |
| r | 0.432 | 0.098 | 2.620 | 2.199 | |
| 0.084 | 0.315 | 1.489 | 1.803 | ||
| 0.049 | 0.137 | 1.386 | 1.498 | ||
| 0.983 | e | 1.185 | 1.141 | ||
| 0.066 | 1.269 | ||||
| 0.014 | L | 1.243 | |||
| 2.370 | 2.235 | 0.441 | |||
| 1.770 | |||||
| 0.496 | |||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sonwani, J.K.; Jia, G.; Mahmoud, H.N.; Wang, Z. Seismic Collapse Risk Assessment of Braced Frames under Near-Fault Earthquakes. Metals 2021, 11, 1271. https://doi.org/10.3390/met11081271
Sonwani JK, Jia G, Mahmoud HN, Wang Z. Seismic Collapse Risk Assessment of Braced Frames under Near-Fault Earthquakes. Metals. 2021; 11(8):1271. https://doi.org/10.3390/met11081271
Chicago/Turabian StyleSonwani, Jeet Kumar, Gaofeng Jia, Hussam N. Mahmoud, and Zhenqiang Wang. 2021. "Seismic Collapse Risk Assessment of Braced Frames under Near-Fault Earthquakes" Metals 11, no. 8: 1271. https://doi.org/10.3390/met11081271
APA StyleSonwani, J. K., Jia, G., Mahmoud, H. N., & Wang, Z. (2021). Seismic Collapse Risk Assessment of Braced Frames under Near-Fault Earthquakes. Metals, 11(8), 1271. https://doi.org/10.3390/met11081271