Validity of the Stryd Power Meter in Measuring Running Parameters at Submaximal Speeds




Abstract
1. Introduction
2. Materials and Methods
2.1. Experimental Approach
2.2. Participants
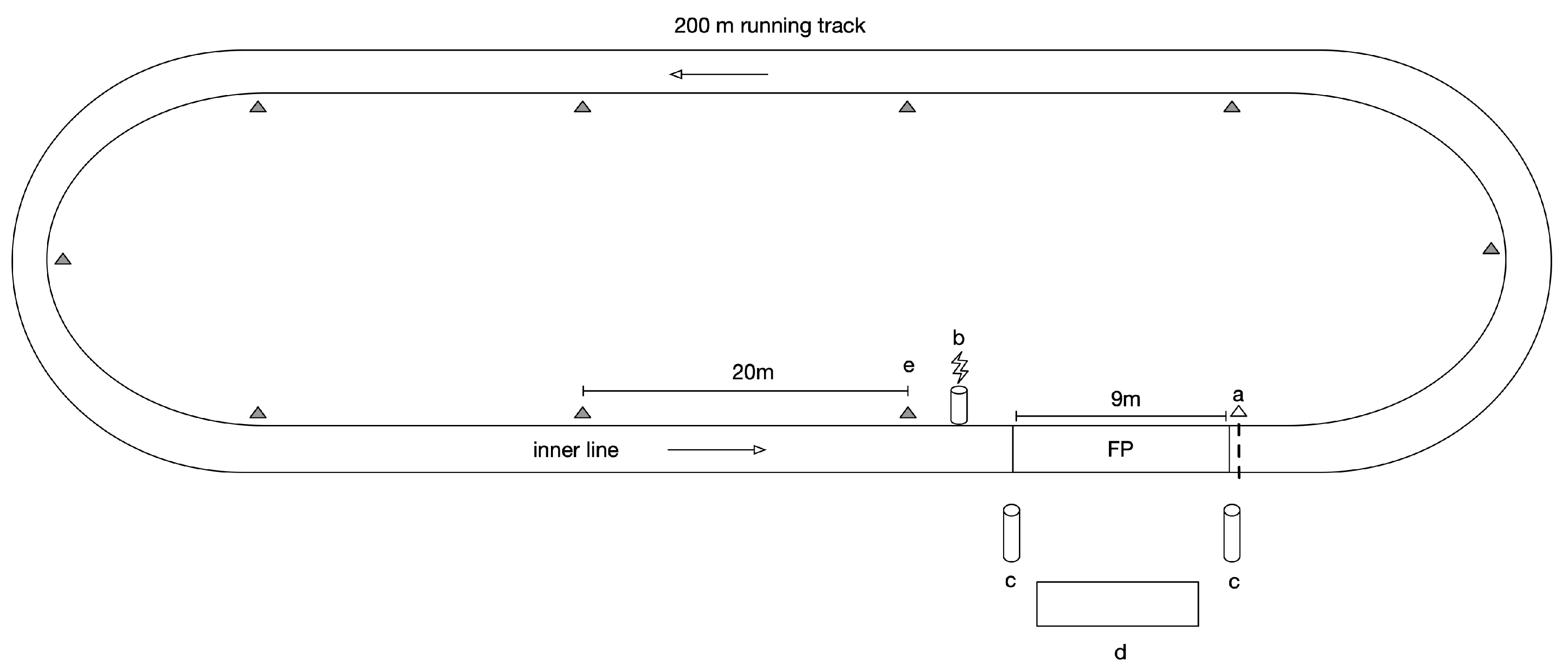
2.3. Protocol
2.4. Materials
2.4.1. Power Meter
2.4.2. Gas Exchange Measures
2.4.3. Force Platforms
2.4.4. Motion Analysis
2.5. Calculations
2.5.1. Ground Contact Time, Stride Time and Stride Frequency
2.5.2. External Mechanical Power, Mechanical Cost of Running and Mechanical Efficiency
2.5.3. Leg Stiffness
2.5.4. Time Matching
2.6. StatisticaL Analysis
2.6.1. Reference Measures
2.6.2. Mechanical Power
2.6.3. Ground Contact Time
2.6.4. Leg Stiffness
3. Results
3.1. Reference Systems: Force Platforms, Portable Metabolic System and Motion Capture
3.1.1. Mechanical Cost of Running
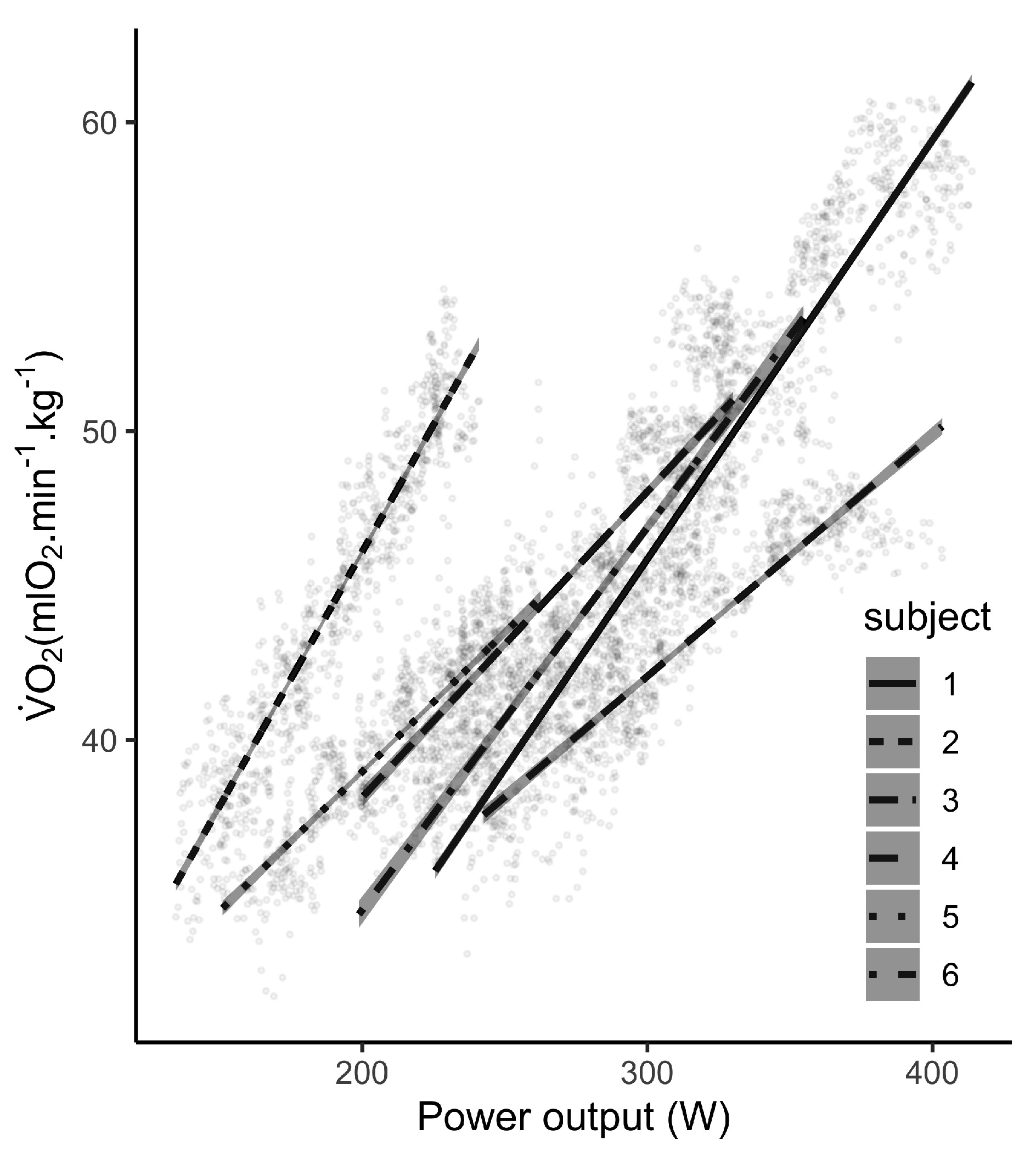
3.1.2. Metabolic and External Mechanical Power Relationship
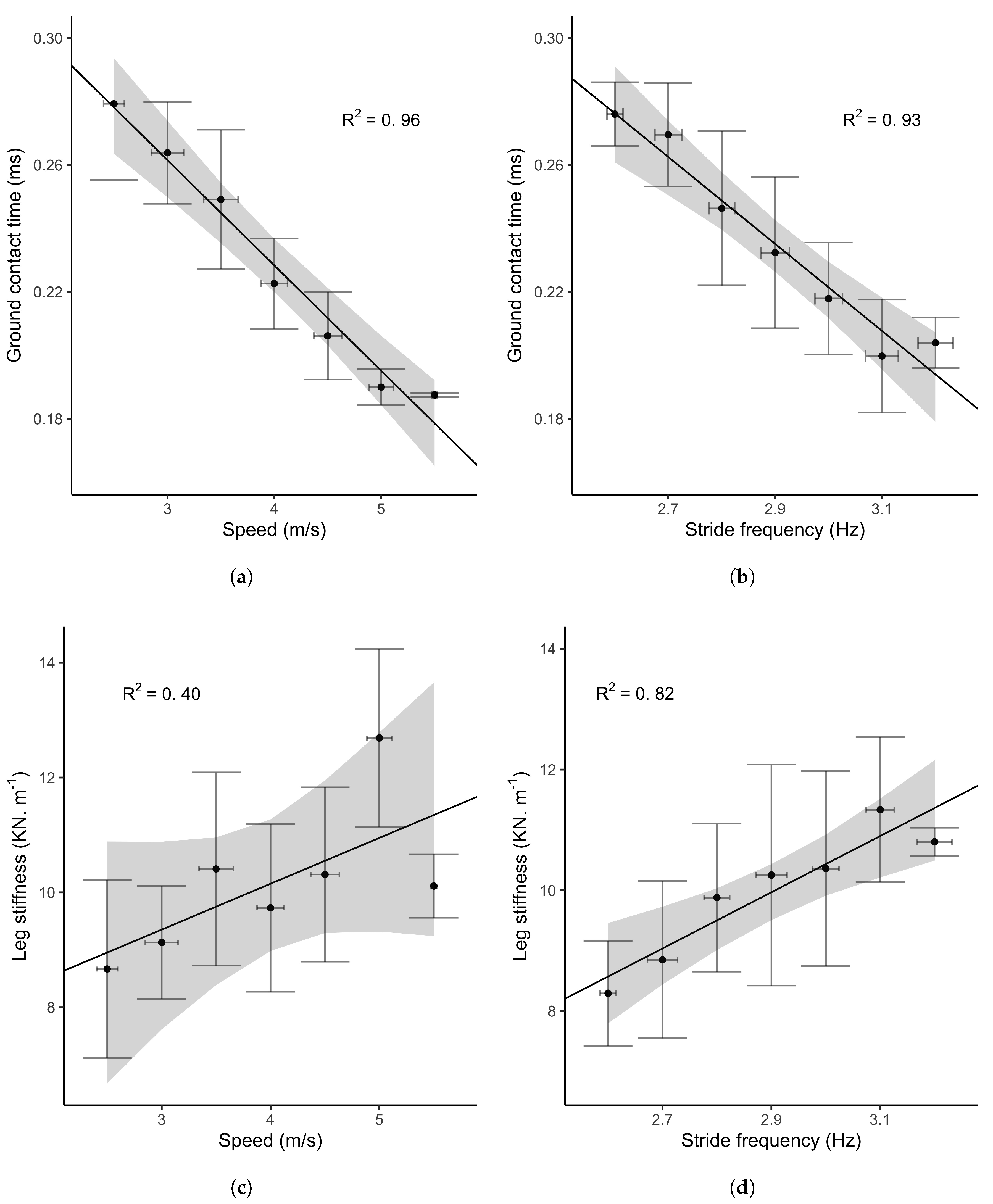
3.1.3. Ground Contact Time and Leg Stiffness
3.2. Stryd and Reference Measures Comparisons
3.2.1. Consumed Metabolic Energy and Power Output
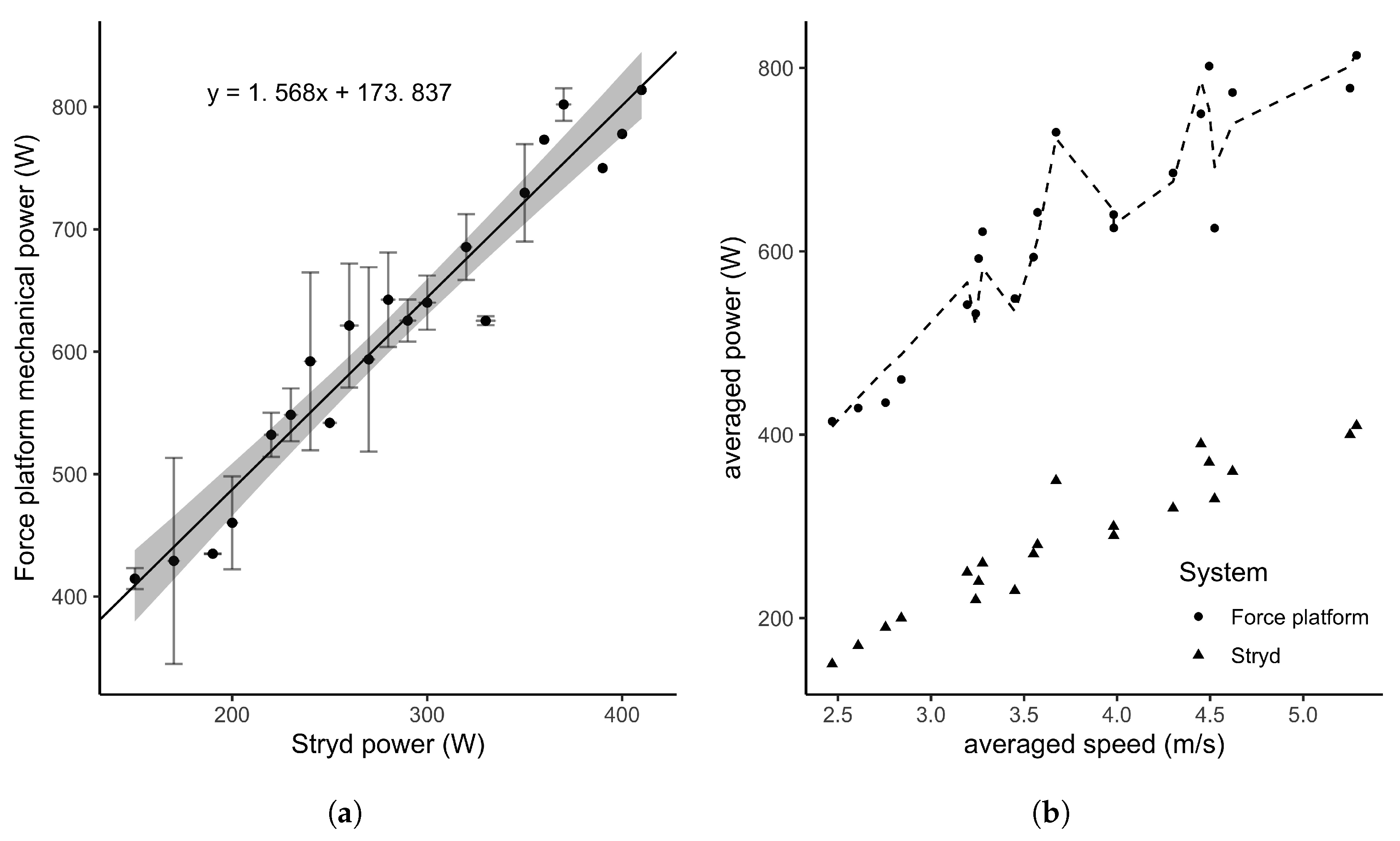
3.2.2. Mechanical Power
3.2.3. Ground Contact Time
3.2.4. Leg Spring Stiffness
4. Discussion
4.1. Reference Measures
4.2. Power Meter and Reference Measurements Comparisons
4.3. Other Measures
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| anterior-posterior acceleration of the centre of mass of the whole body | |
| C | foot impact given by optical sensors |
| mechanical cost | |
| displacement at time i | |
| F | resultant of external forces |
| flexible and interoperable data transfer | |
| g | acceleration due to gravity |
| ground contact time | |
| global positioning system | |
| ground reaction forces | |
| Intraclass correlation coefficient | |
| inertial measurement unit | |
| leg stiffness | |
| L | initial leg length |
| linear mixed model | |
| leg spring stiffness | |
| m | mass of a subject |
| maximal aerobic speed | |
| mechanical efficiency | |
| power output | |
| running economy | |
| speed at time i | |
| contact time | |
| stride time | |
| oxygen consumption | |
| maximal oxygen consumption | |
| external mechanical power | |
| kinetic work | |
| metabolic power | |
| potential work | |
| total work | |
| stride frequency |
Appendix A. References Measures: Models
References
- Sharma, A.P.; Saunders, P.U.; Garvican-Lewis, L.A.; Clark, B.; Welvaert, M.; Gore, C.J.; Thompson, K.G. Improved performance in national-level runners with increased training load at 1600 and 1800 m. Int. J. Sports Physiol. Perform. 2019, 14, 286–295. [Google Scholar] [CrossRef] [PubMed]
- Hausswirth, C.; Le Meur, Y.; Couturier, A.; Bernard, T.; Brisswalter, J. Accuracy and repeatability of the Polar® RS800sd to evaluate stride rate and running speed. Int. J. Sports Med. 2009, 30, 354–359. [Google Scholar] [CrossRef] [PubMed]
- Adams, D.; Pozzi, F.; Carroll, A.; Rombach, A.; Zeni, J., Jr. Validity and reliability of a commercial fitness watch for measuring running dynamics. J. Orthop. Sports Phys. Ther. 2016, 46, 471–476. [Google Scholar] [CrossRef] [PubMed]
- Rodriguez, D.A.; Brown, A.L.; Troped, P.J. Portable global positioning units to complement accelerometry-based physical activity monitors. Med. Sci. Sports Exerc. 2005, 37, S572–S581. [Google Scholar] [CrossRef] [PubMed]
- Townshend, A.D.; Worringham, C.J.; Stewart, I.B. Assessment of speed and position during human locomotion using nondifferential GPS. Med. Sci. Sports Exerc. 2008, 40, 124–132. [Google Scholar] [CrossRef]
- Moreira, A.; Costa, E.; Lodo, L.; Freitas, C.; Arruda, A.F.; Aoki, M. Validez y reproducibilidad de receptores GPS en relación de la distancia recorrida. Rev. Andal. Med. Deporte 2013, 6, 146–150. [Google Scholar] [CrossRef]
- Hongu, N.; Orr, B.J.; Roe, D.J.; Reed, R.G.; Going, S.B. Global positioning system watches for estimating energy expenditure. J. Strength Cond. Res. 2013, 27, 3216–3220. [Google Scholar] [CrossRef]
- Roos, L.; Taube, W.; Beeler, N.; Wyss, T. Validity of sports watches when estimating energy expenditure during running. BMC Sports Sci. Med. Rehabil. 2017, 9, 22. [Google Scholar] [CrossRef]
- Jones, S.L.P.; Passfield, L. The dynamic calibration of bicycle power measuring cranks. In The Engineering of Sport; Blackwell Science: Oxford, UK, 1998; pp. 265–274. [Google Scholar]
- Gardner, A.S.; Stephens, S.; Martin, D.T.; Lawton, E.; Lee, H.; Jenkins, D. Accuracy of SRM and power tap power monitoring systems for bicycling. Med. Sci. Sports Exerc. 2004, 36, 1252–1258. [Google Scholar] [CrossRef]
- Paton, C.D.; Hopkins, W.G. Tests of cycling performance. Sports Med. 2001, 31, 489–496. [Google Scholar] [CrossRef]
- Pinot, J.; Grappe, F. The record power profile to assess performance in elite cyclists. Int. J. Sports Med. 2011, 32, 839–844. [Google Scholar] [CrossRef] [PubMed]
- Péronnet, F.; Thibault, G. Mathematical analysis of running performance and world running records. J. Appl. Physiol. 1989, 67, 453–465. [Google Scholar] [CrossRef] [PubMed]
- McCann, D.J.; Higginson, B.K. Training to maximize economy of motion in running gait. Curr. Sports Med. Rep. 2008, 7, 158–162. [Google Scholar] [CrossRef] [PubMed]
- Luedke, L.E.; Heiderscheit, B.C.; Williams, D.; Rauh, M.J. Influence of Step Rate on Shin Injury and Anterior Knee Pain in High School Runners. Med. Sci. Sports Exerc. 2016, 48, 1244–1250. [Google Scholar] [CrossRef]
- García-Pinillos, F.; Roche-Seruendo, L.E.; Marcén-Cinca, N.; Marco-Contreras, L.A.; Latorre-Román, P.A.; Marcén-Cinca, N. Absolute Reliability and Concurrent Validity of the Stryd System for the Assessment of Running Stride Kinematics at Different Velocities. J. Strength Cond. Res. 2018. [Google Scholar] [CrossRef]
- Navalta, J.W.; Montes, J.; Bodell, N.G.; Aguilar, C.D.; Lujan, A.; Guzman, G.; Kam, B.K.; Manning, J.W.; DeBeliso, M. Wearable Device Validity in Determining Step Count During Hiking and Trail Running. J. Meas. Phys. Behav. 2018, 1, 86–93. [Google Scholar] [CrossRef]
- Lara, F.; Shearer, L.; Coppi, M.; Hayden, N.; Ogden, J.; Murr, S.; Hutchison, R.; Sobolewski, E. Reliability of a Running Power Meter Between Trials Of Submaximal Running on Three Different Surfaces: 1838 Board# 99 May 31 330 PM-500 PM. Med. Sci. Sports Exerc. 2018, 50, 436. [Google Scholar]
- García-Pinillos, F.; Latorre-Román, P.Á.; Roche-Seruendo, L.E.; García-Ramos, A. Prediction of power output at different running velocities through the two-point method with the Stryd™ power meter. Gait Posture 2019, 68, 238–243. [Google Scholar] [CrossRef]
- Buist, I.; Bredeweg, S.W.; Bessem, B.; Van Mechelen, W.; Lemmink, K.A.; Diercks, R.L. Incidence and risk factors of running-related injuries during preparation for a 4-mile recreational running event. Br. J. Sports Med. 2010, 44, 598–604. [Google Scholar] [CrossRef]
- Cavagna, G. Force platforms as ergometers. J. Appl. Physiol. 1975, 39, 174–179. [Google Scholar] [CrossRef]
- McMahon, T.; Cheng, G. The mechanics of running: How does stiffness couple with speed? J. Biomech. 1990, 23, 65–78. [Google Scholar] [CrossRef]
- Billat, V.; Hill, D.; Pinoteau, J.; Petit, B.; Koralsztein, J.P. Effect of protocol on determination of velocity at VO2 max and on its time to exhaustion. Arch. Physiol. Biochem. 1996, 104, 313–321. [Google Scholar] [CrossRef] [PubMed]
- Doyon, K.H.; Perrey, S.; Abe, D.; Hughson, R.L. Field Testing of in Cross-Country Skiers With Portable Breath-by-Breath System. Can. J. Appl. Physiol. 2001, 26, 1–11. [Google Scholar] [CrossRef] [PubMed]
- Duffield, R.; Dawson, B.; Pinnington, H.; Wong, P. Accuracy and reliability of a Cosmed K4b2 portable gas analysis system. J. Sci. Med. Sport 2004, 7, 11–22. [Google Scholar] [CrossRef]
- Brisswalter, J.; Tartaruga, M.P. Comparison of COSMED’S FitMate™ and K4b2 metabolic systems reliability during graded cycling exercise. Scand. J. Clin. Lab. Investig. 2014, 74, 722–724. [Google Scholar] [CrossRef]
- Smith, S. Digital Signal Processing: A Practical Guide for Engineers and Scientists; Elsevier: Burlington, MA, USA, 2013. [Google Scholar]
- Keir, D.A.; Murias, J.M.; Paterson, D.H.; Kowalchuk, J.M. Breath-by-breath pulmonary O2 uptake kinetics: Effect of data processing on confidence in estimating model parameters. Exp. Physiol. 2014, 99, 1511–1522. [Google Scholar] [CrossRef] [PubMed]
- Di Prampero, P.; Atchou, G.; Brückner, J.C.; Moia, C. The energetics of endurance running. Eur. J. Appl. Physiol. Occup. Physiol. 1986, 55, 259–266. [Google Scholar] [CrossRef]
- Livesey, G.; Elia, M. Estimation of energy expenditure, net carbohydrate utilization, and net fat oxidation and synthesis by indirect calorimetry: Evaluation of errors with special reference to the detailed composition of fuels. Am. J. Clin. Nutr. 1988, 47, 608–628. [Google Scholar] [CrossRef]
- Navalta, J.W.; Montes, J.; Bodell, N.G.; Aguilar, C.D.; Radzak, K.; Manning, J.W.; DeBeliso, M. Reliability of Trail Walking and Running Tasks Using the Stryd Power Meter. Int. J. Sports Med. 2019, 40, 498–502. [Google Scholar] [CrossRef]
- Vehtari, A.; Gelman, A.; Simpson, D.; Carpenter, B.; Bürkner, P.C. Rank-normalization, folding, and localization: An improved ˆ R for assessing convergence of MCMC. arXiv 2019, arXiv:1903.08008. [Google Scholar] [CrossRef]
- Jeffreys, H. Theory of Probability; Oxford Univ. Press: Oxford, UK, 1961. [Google Scholar]
- Lee, M.D.; Wagenmakers, E.J. Bayesian Cognitive Modeling: A Practical Course; Cambridge university Press: Cambridge, UK, 2014. [Google Scholar]
- Barr, D.J.; Levy, R.; Scheepers, C.; Tily, H.J. Random effects structure for confirmatory hypothesis testing: Keep it maximal. J. Mem. Lang. 2013, 68, 255–278. [Google Scholar] [CrossRef] [PubMed]
- Chelly, S.M.; Denis, C. Leg power and hopping stiffness: Relationship with sprint running performance. Med. Sci. Sports Exerc. 2001, 33, 326–333. [Google Scholar] [CrossRef] [PubMed]
- Blickhan, R. The spring-mass model for running and hopping. J. Biomech. 1989, 22, 1217–1227. [Google Scholar] [CrossRef]
- Farley, C.T.; Gonzalez, O. Leg stiffness and stride frequency in human running. J. Biomech. 1996, 29, 181–186. [Google Scholar] [CrossRef]
- Bürkner, P.C. brms: An R package for Bayesian multilevel models using Stan. J. Stat. Softw. 2017, 80, 1–28. [Google Scholar] [CrossRef]
- Bland, J.M.; Altman, D. Statistical methods for assessing agreement between two methods of clinical measurement. Lancet 1986, 327, 307–310. [Google Scholar] [CrossRef]
- Ito, A.; Komi, P.V.; Sjödin, B.; Bosco, C.; Karlsson, J. Mechanical efficiency of positive work in running at different speeds. Med. Sci. Sports Exerc. 1983, 15, 299–308. [Google Scholar] [CrossRef]
- Willems, P.; Cavagna, G.; Heglund, N. External, internal and total work in human locomotion. J. Exp. Biol. 1995, 198, 379–393. [Google Scholar]
- Candau, R.; Belli, A.; Millet, G.; Georges, D.; Barbier, B.; Rouillon, J. Energy cost and running mechanics during a treadmill run to voluntary exhaustion in humans. Eur. J. Appl. Physiol. Occup. Physiol. 1998, 77, 479–485. [Google Scholar] [CrossRef]
- Harris, C.; Debeliso, M.; Adams, K.J. The effects of running speed on the metabolic and mechanical energy costs of running. J. Exerc. Physiol. Online 2003, 6, 28–37. [Google Scholar]
- Carrard, A.; Fontana, E.; Malatesta, D. Mechanical Determinants of the U-Shaped Speed-Energy Cost of Running Relationship. Front. Physiol. 2018, 9, 1790. [Google Scholar] [CrossRef]
- Poole, D.C.; Barstow, T.J.; Gaesser, G.A.; Willis, W.T.; Whipp, B.J. VO2 slow component: Physiological and functional significance. Med. Sci. Sports Exerc. 1994, 26, 1354–1358. [Google Scholar] [PubMed]
- Gaesser, G.A.; Poole, D.C. The slow component of oxygen uptake kinetics in humans. Exerc. Sport Sci. Rev. 1996, 24, 35–70. [Google Scholar] [CrossRef]
- Cavagna, G.; Kaneko, M. Mechanical work and efficiency in level walking and running. J. Physiol. 1977, 268, 467–481. [Google Scholar] [CrossRef] [PubMed]
- Kyröläinen, H.; Komi, P.; Belli, A. Mechanical efficiency in athletes during running. Scand. J. Med. Sci. Sports 1995, 5, 200–208. [Google Scholar] [CrossRef] [PubMed]
- Arampatzis, A.; Brüggemann, G.P.; Metzler, V. The effect of speed on leg stiffness and joint kinetics in human running. J. Biomech. 1999, 32, 1349–1353. [Google Scholar] [CrossRef]
- Morin, J.B.; Dalleau, G.; Kyröläinen, H.; Jeannin, T.; Belli, A. A simple method for measuring stiffness during running. J. Appl. Biomech. 2005, 21, 167–180. [Google Scholar] [CrossRef]
- Austin, C.L.; Hokanson, J.F.; McGinnis, P.M.; Patrick, S. The relationship between running power and running economy in well-trained distance runners. Sports 2018, 6, 142. [Google Scholar] [CrossRef]
- Aubry, R.L.; Power, G.A.; Burr, J.F. An assessment of running power as a training metric for elite and recreational runners. J. Strength Cond. Res. 2018, 32, 2258–2264. [Google Scholar] [CrossRef]
- Snyder, K.L.; Mohrman, W.P.; Williamson, J.A.; Li, K. Methodological Flaws in Aubry, RL, Power, GA, and Burr, JF. An Assessment of Running Power as a Training Metric for Elite and Recreational Runners. J Strength Cond Res 32: 2258–2264, 2018. J. Strength Cond. Res. 2018, 32, e61. [Google Scholar] [CrossRef]
- Stryd. How to Lead the Pack: Running Power Meters and Quality Data. Available online: https://blog.stryd.com/2017/12/07/how-to-lead-the-pack-running-power-meters-quality-data/ (accessed on 6 December 2017).
- Perrey, S. Time course of oxygen uptake at exercise. In Exercise Physiology: From a Cellular to an Integrative Approach; IOS Press: Amsterdam, The Netherlands, 2010; Volume 75, pp. 285–298. [Google Scholar]
- Asmussen, E.; Bonde-Petersen, F. Storage of elastic energy in skeletal muscles in man. Acta Physiol. Scand. 1974, 91, 385–392. [Google Scholar] [CrossRef] [PubMed]
- Zacks, R. The mechanical efficiencies of running and bicycling against a horizontal impeding force. Int. Z. Angew. Physiol. Einschließlich Arb. 1973, 31, 249–258. [Google Scholar] [CrossRef]
- Morin, J.B.; Samozino, P.; Zameziati, K.; Belli, A. Effects of altered stride frequency and contact time on leg-spring behavior in human running. J. Biomech. 2007, 40, 3341–3348. [Google Scholar] [CrossRef] [PubMed]
- Slawinski, J.; Heubert, R.; Quievre, J.; Billat, V.; Hannon, C. Changes in spring-mass model parameters and energy cost during track running to exhaustion. J. Strength Cond. Res. 2008, 22, 930–936. [Google Scholar] [CrossRef] [PubMed]
- Moore, I.S. Is there an economical running technique? A review of modifiable biomechanical factors affecting running economy. Sports Med. 2016, 46, 793–807. [Google Scholar] [CrossRef]
- Foster, C.; Lucia, A. Running economy. Sports Med. 2007, 37, 316–319. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Estimate | Est.Error | Effects | ||
|---|---|---|---|---|---|
| Intercept | −8.530 | 8.842 | −27.898 | 7.197 | Population-level effects |
| Mechanical power | 0.081 | 0.018 | 0.035 | 0.111 | Population-level effects |
| sd(Intercept) | 15.234 | 7.535 | 3.123 | 32.769 | Group-level effects |
| sd(mechanical power) | 0.029 | 0.019 | 0.004 | 0.078 | Group-level effects |
| cor(Intercept,mechanical power) | −0.492 | 0.428 | −0.949 | 0.658 | Group-level effects |
| sigma | 2.410 | 0.346 | 1.853 | 3.204 | Family specific parameters |
| Parameter | Estimate | Est.Error | Effects | Measure | |||
|---|---|---|---|---|---|---|---|
| Intercept | 568.401 | 38.163 | 490.765 | 644.830 | Population-level effects | Mechanical power | |
| Stryd | −304.952 | 9.817 | −324.304 | −285.993 | >100 | Population-level effects | Mechanical power |
| Speed | 65.486 | 12.914 | 42.022 | 93.125 | 15.38 | Population-level effects | Mechanical power |
| Stryd:speed interaction | −23.782 | 9.884 | −43.192 | −4.554 | >100 | Population-level effects | Mechanical power |
| sd(Intercept) | 86.027 | 36.563 | 41.970 | 180.565 | Group-level effects | Mechanical power | |
| sd(speed) | 17.260 | 18.408 | 0.438 | 66.867 | Group-level effects | Mechanical power | |
| cor(Intercept,speed) | 0.349 | 0.516 | −0.819 | 0.978 | Group-level effects | Mechanical power | |
| sigma | 52.325 | 3.651 | 45.751 | 59.970 | Family specific parameters | Mechanical power | |
| Intercept | 0.241 | 0.008 | 0.226 | 0.255 | Population-level effects | Contact time | |
| Stryd | −0.005 | 0.002 | −0.009 | −0.002 | 0.008 | Population-level effects | Contact time |
| Speed | −0.034 | 0.012 | −0.058 | −0.011 | >100 | Population-level effects | Contact time |
| Stryd:speed interaction | 0.000 | 0.002 | −0.003 | 0.004 | 0.72 | Population-level effects | Contact time |
| sd(Intercept) | 0.016 | 0.009 | 0.007 | 0.039 | Group-level effects | Contact time | |
| sd(speed) | 0.025 | 0.015 | 0.009 | 0.063 | Group-level effects | Contact time | |
| cor(Intercept,speed) | −0.216 | 0.410 | −0.862 | 0.647 | Group-level effects | Contact time | |
| sigma | 0.010 | 0.001 | 0.009 | 0.012 | Family specific parameters | Contact time | |
| Intercept | 8.574 | 0.980 | 6.680 | 10.571 | Population-level effects | Leg stiffness | |
| Stryd | −0.602 | 0.893 | −2.334 | 1.154 | 0.007 | Population-level effects | Leg stiffness |
| Speed | 0.394 | 0.240 | −0.099 | 0.865 | 0.012 | Population-level effects | Leg stiffness |
| Stryd:lap interaction | 0.063 | 0.244 | −0.418 | 0.534 | 0.020 | Population-level effects | Leg stiffness |
| sd(Intercept) | 1.427 | 0.959 | 0.119 | 3.830 | Group-level effects | Leg stiffness | |
| sd(speed) | 0.284 | 0.255 | 0.010 | 0.940 | Group-level effects | Leg stiffness | |
| cor(Intercept,speed) | −0.105 | 0.572 | −0.953 | 0.927 | Group-level effects | Leg stiffness | |
| sigma | 0.972 | 0.063 | 0.857 | 1.106 | Family specific parameters | Leg stiffness |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Imbach, F.; Candau, R.; Chailan, R.; Perrey, S. Validity of the Stryd Power Meter in Measuring Running Parameters at Submaximal Speeds. Sports 2020, 8, 103. https://doi.org/10.3390/sports8070103
Imbach F, Candau R, Chailan R, Perrey S. Validity of the Stryd Power Meter in Measuring Running Parameters at Submaximal Speeds. Sports. 2020; 8(7):103. https://doi.org/10.3390/sports8070103
Chicago/Turabian StyleImbach, Frank, Robin Candau, Romain Chailan, and Stephane Perrey. 2020. "Validity of the Stryd Power Meter in Measuring Running Parameters at Submaximal Speeds" Sports 8, no. 7: 103. https://doi.org/10.3390/sports8070103
APA StyleImbach, F., Candau, R., Chailan, R., & Perrey, S. (2020). Validity of the Stryd Power Meter in Measuring Running Parameters at Submaximal Speeds. Sports, 8(7), 103. https://doi.org/10.3390/sports8070103