A Fully Implicit Coupled Scheme for Mixed Elastohydrodynamic Problems on Co-Allocated Grids


Abstract

1. Introduction
2. The Mathematical Model
2.1. Governing Equations
2.1.1. Average Reynolds Equation
2.1.2. Film Thickness Equation
2.1.3. The Force Balance Equation
2.2. Equation of State
2.3. Viscosity–Pressure Relation
2.4. Elastic Deformation
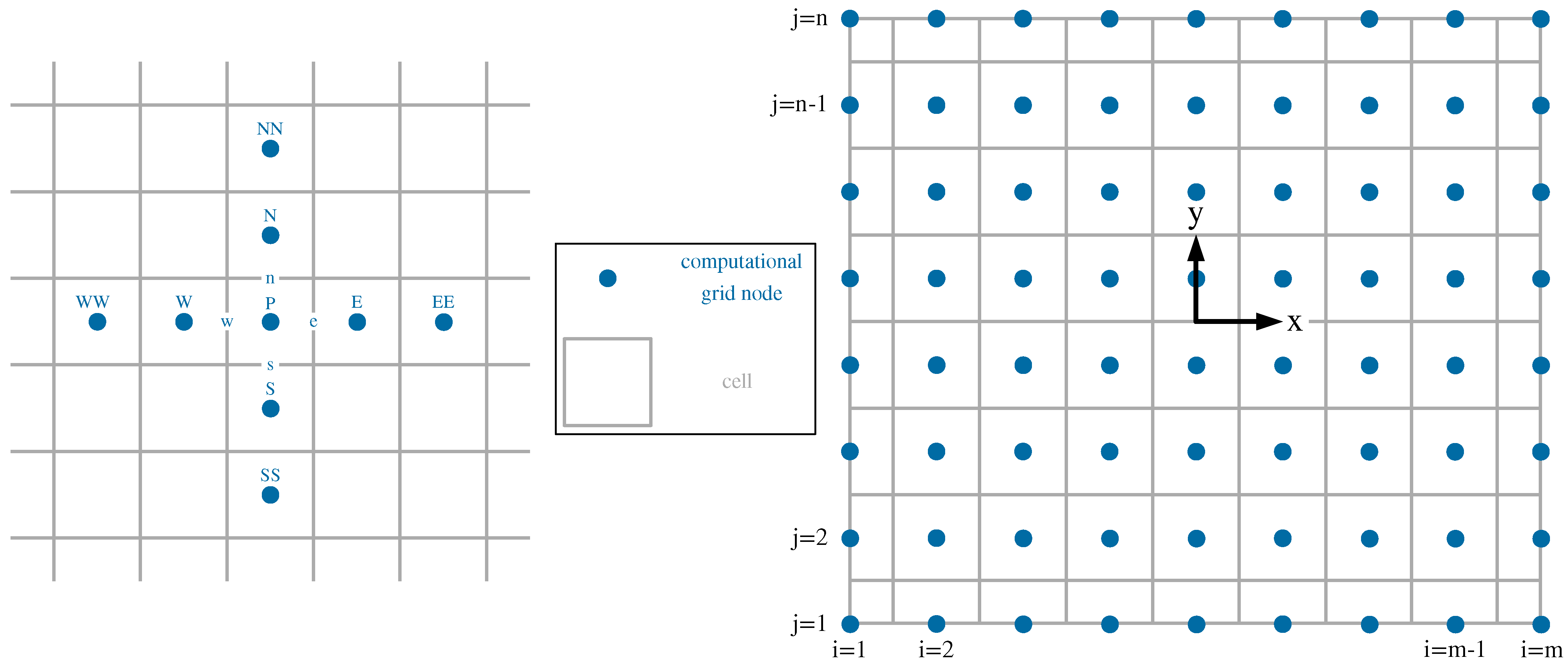
3. Spatial and Temporal Discretization
3.1. The Average Reynolds Equation
3.2. The Film Thickness Equation
3.3. The Force Balance Equation
4. Solution Strategy
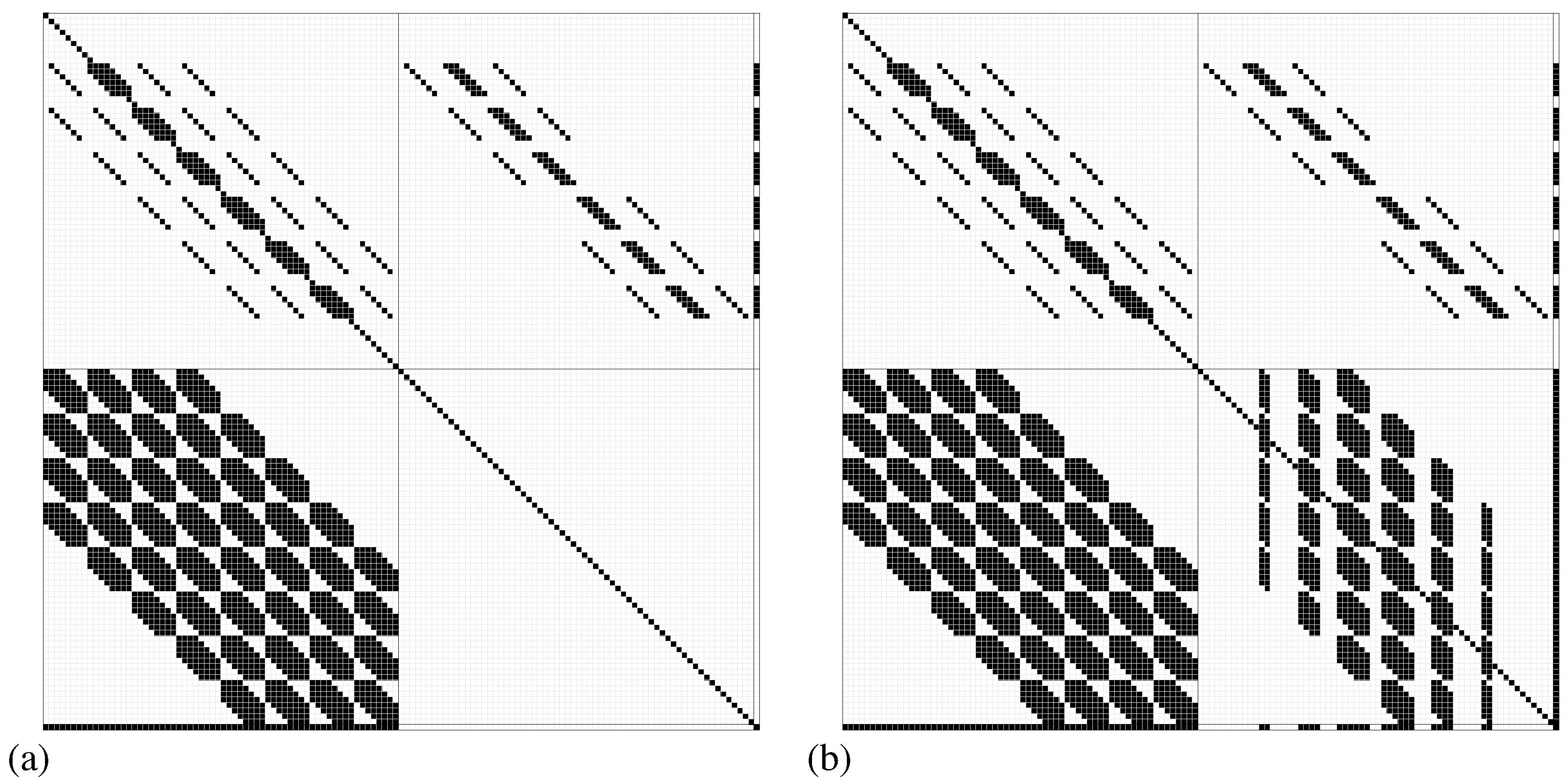
4.1. The Coupled System of Equations
4.2. The Relaxation Scheme
4.3. The Linear Equation Solution
4.4. Initialisation
5. Numerical Results
5.1. Test Case
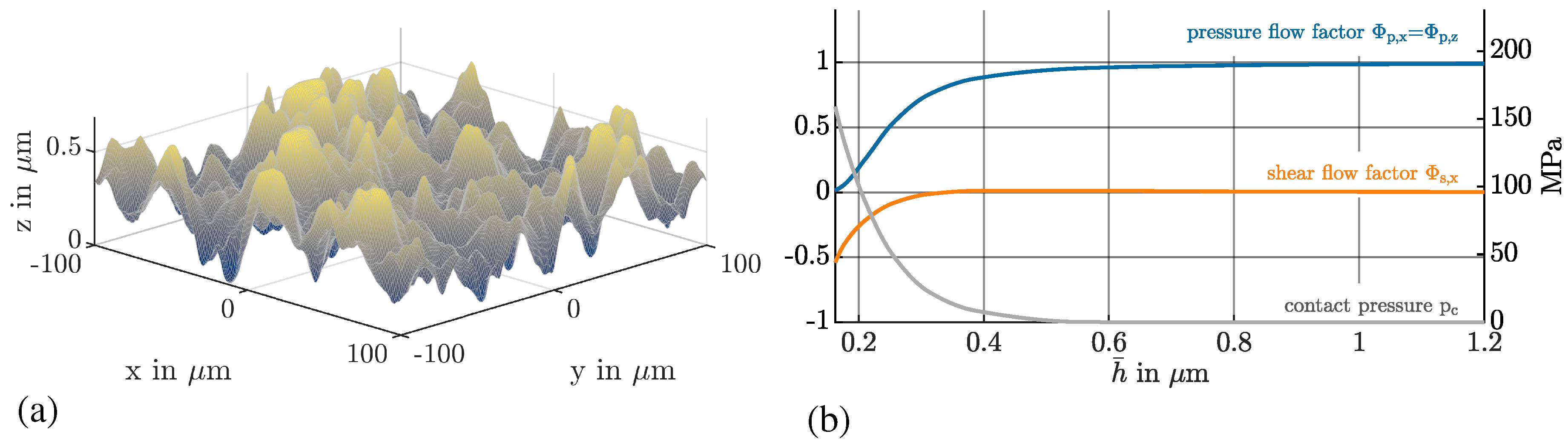
5.2. Surface Roughnes
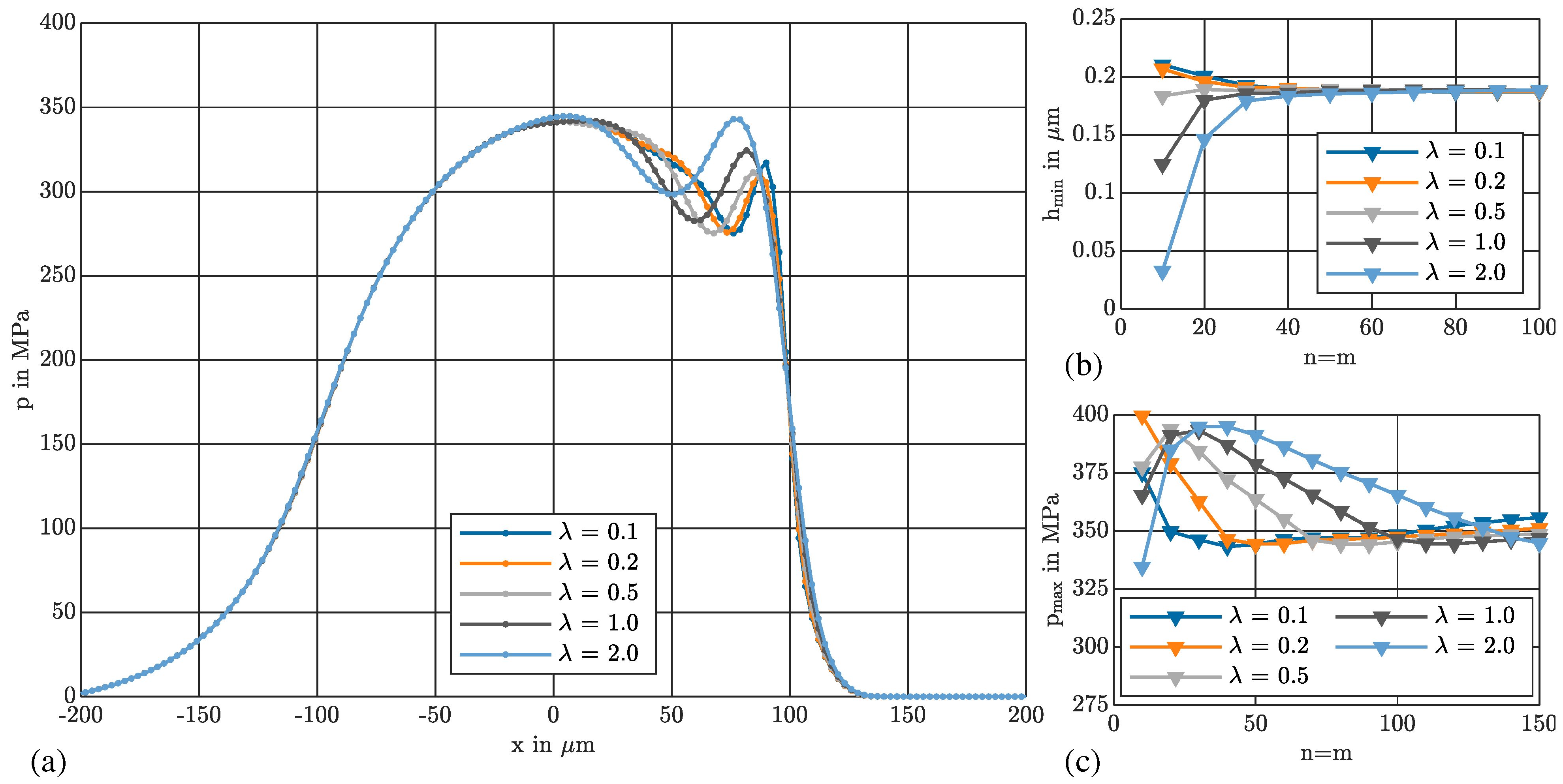
5.3. Mesh Study
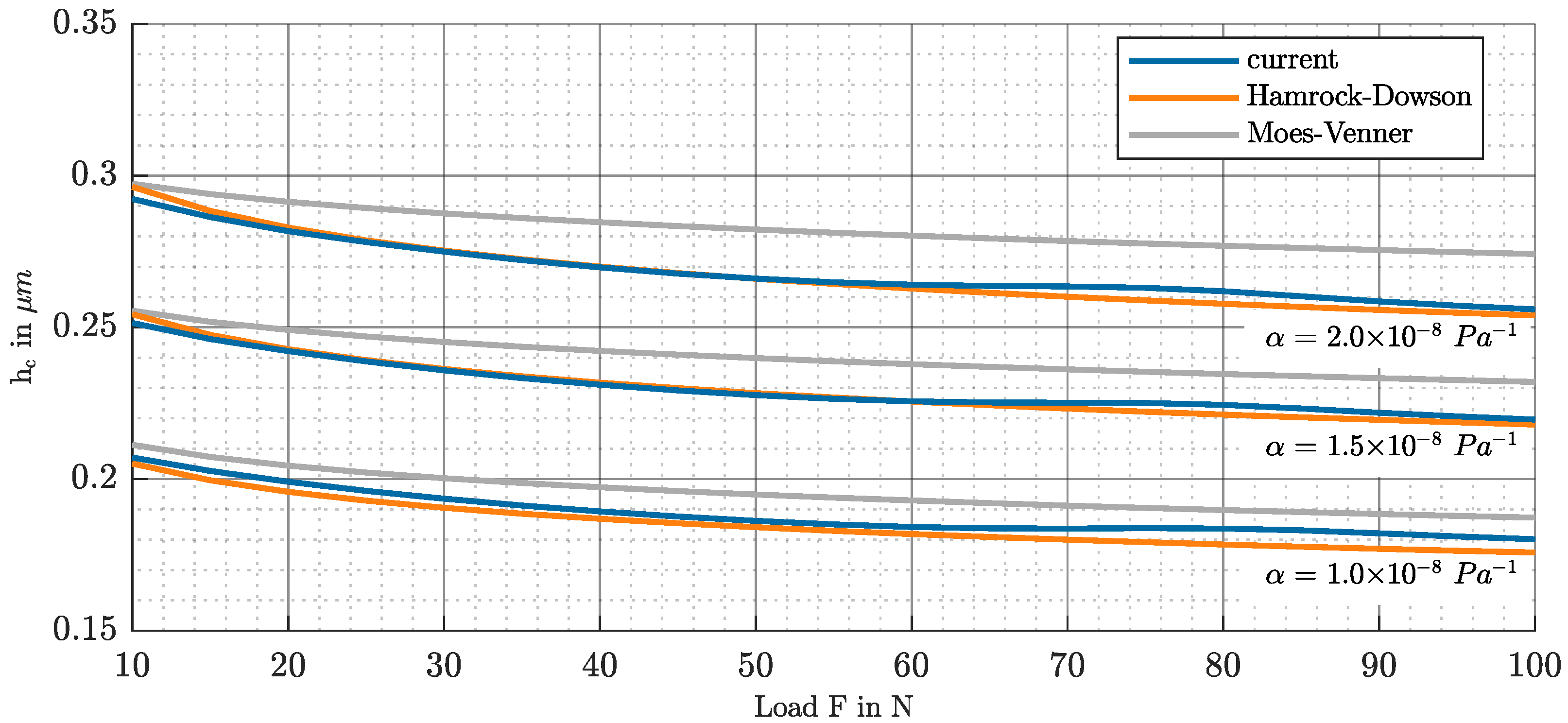
5.4. Verification
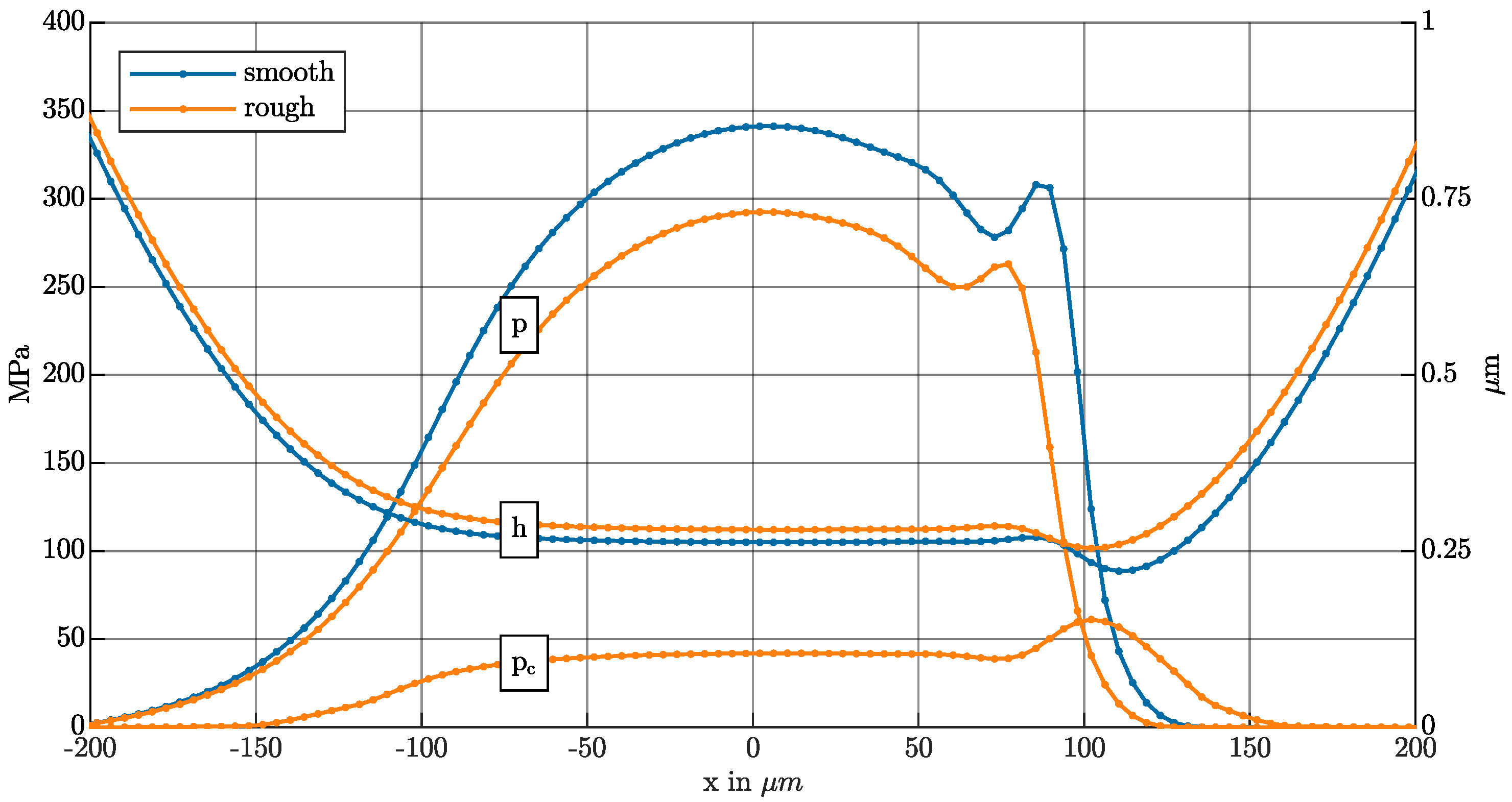
5.5. Results for the Rough Case
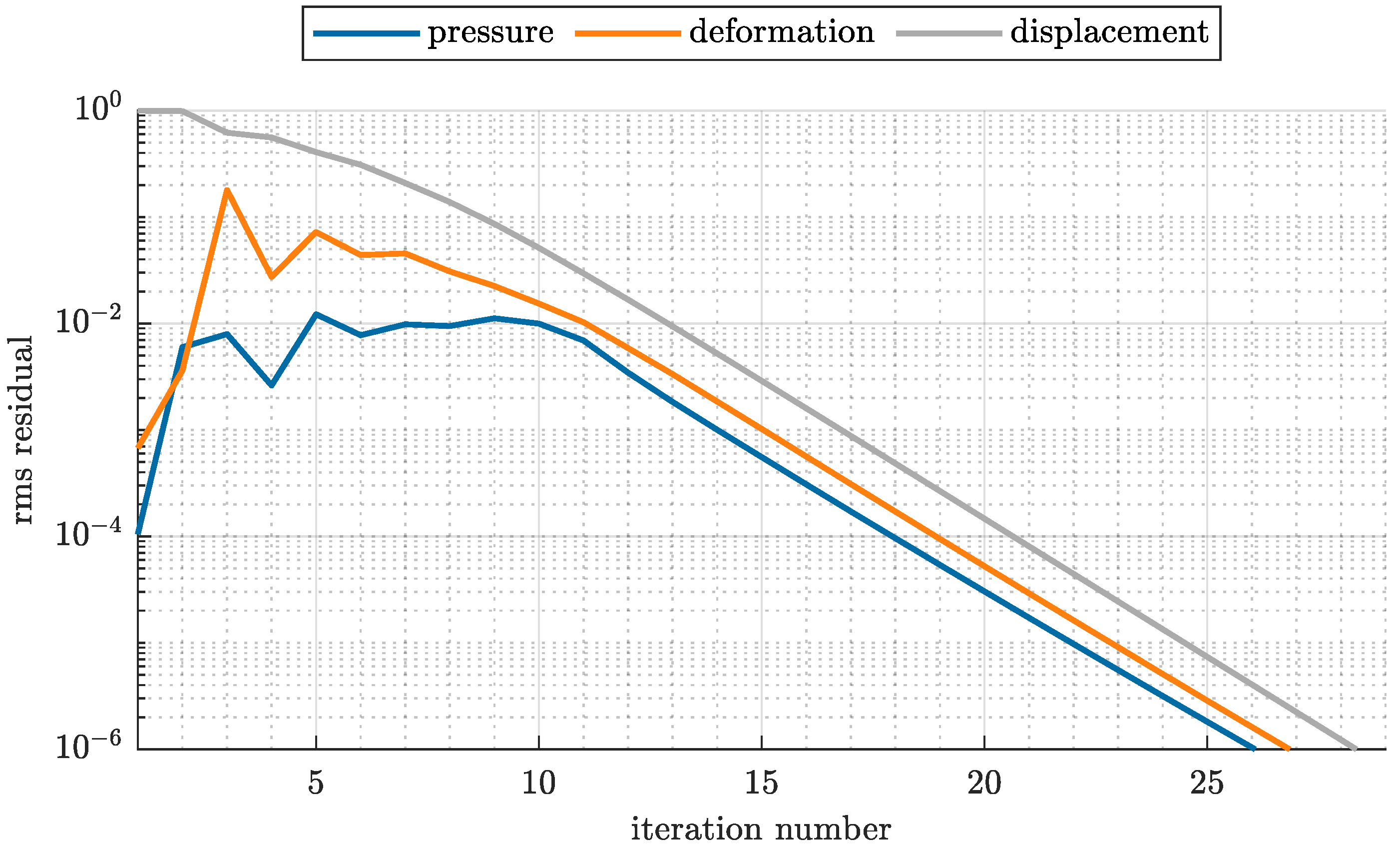
6. Convergence and Solution Time
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| Latin symbols | |
| radii of the Hertzian contact ellipse | |
| d | coefficient of the pressure correction term |
| deformation of the Hertzian contact ellipse | |
| Young’s modulus of body 1, 2 | |
| reduced Young’s modulus | |
| h | film thickness |
| w | elastic deformation |
| central film thickness | |
| rigid body displacement | |
| Jacobian | |
| K | deformation kernel |
| normal vector | |
| p | hydrodynamic pressure |
| atmospheric pressure | |
| contact pressure | |
| ref. pressure in Roelands’ equation | |
| auxiliary radii | |
| radii of body 1, 2 along x | |
| radii of body 1, 2 along y | |
| surface velocity | |
| X | general solution variable |
| spatial coordinates | |
| z | exponent in Roelands’ equation |
| Greek symbols | |
| pressure–viscosity coefficient | |
| explicit under-relaxation factor | |
| Bunsen solubility coefficient | |
| fractional film content | |
| empirical factor of pressure correction term | |
| Poisson’s ratio of body 1, 2 | |
| fluid density | |
| density at atmospheric pressure | |
| tensor of pressure flow factors | |
| pressure flow factors | |
| tensor of shear flow factors | |
| shear flow factors | |
| dyn. viscosity | |
| viscosity at atmospheric pressure | |
| implicit under-relaxation factor | |
| integration domain | |
| boundary of |
Appendix A. Accuracy of the Pressure Gradient Approximation
References
- Hamrock, B.J.; Dowson, D. Isothermal Elastohydrodynamic Lubrication of Point Contacts: Part III—Fully Flooded Results. J. Lubr. Technol. 1977, 99, 264–275. [Google Scholar] [CrossRef]
- Venner, C.H.; Lubrecht, A.A. Multilevel Methods in Lubrication; Elsevier: Amsterdam, The Netherlands, 2000. [Google Scholar]
- Hughes, T.; Elcoate, C.; Evans, H. Coupled solution of the elastohydrodynamic line contact problem using a differential deflection method. Proc. Inst. Mech. Eng. Part-J. Mech. Eng. Sci. 2000, 214, 585–598. [Google Scholar] [CrossRef]
- Zhu, D.; Hu, Y.Z. A Computer Program Package for the Prediction of EHL and Mixed Lubrication Characteristics, Friction, Subsurface Stresses and Flash Temperatures Based on Measured 3-D Surface Roughness. Tribol. Trans. 2001, 44, 383–390. [Google Scholar] [CrossRef]
- Habchi, W.; Eyheramendy, D.; Vergne, P.; Morales-Espejel, G.E. A Full-System Approach of the Elastohydrodynamic Line/Point Contact Problem. ASME J. Tribol. 2008, 130, 021501. [Google Scholar] [CrossRef]
- Brooks, A.N.; Hughes, T.J.R. Streamline upwind/Petrov-Galerkin formulations for convection dominated flows with particular emphasis on the incompressible Navier-Stokes equations. Comput. Methods Appl. Mech. Eng. 1982, 32, 199–259. [Google Scholar] [CrossRef]
- Hajishafiee, A.; Kadiric, A.; Ioannides, S.; Dini, D. A coupled finite-volume CFD solver for two-dimensional elasto-hydrodynamic lubrication problems with particular application to rolling element bearings. Tribol. Int. 2017, 109, 258–273. [Google Scholar] [CrossRef]
- Schmidt, J.H. An Efficient Solution Procedure for Elastohydrodynamic Contact Problems Considering Structural Dynamics; KIT Scientific Publishing: Karlsruhe, Germany, 2019. [Google Scholar]
- Masjedi, M.; Khonsari, M. On the Effect of Surface Roughness in Point-Contact EHL: Formulas for Film Thickness and Asperity Load. Tribol. Int. 2015, 82, 228–244. [Google Scholar] [CrossRef]
- Zhu, D.; Cheng, H. Effect of Surface Roughness on the Point Contact EHL. J. Tribol. 1988, 110, 32–37. [Google Scholar] [CrossRef]
- Gu, C.; Zhang, D.; Jiang, X.; Meng, X.; Wang, S.; Ju, P.; Liu, J. Mixed EHL Problems: An Efficient Solution to the Fluid–Solid Coupling Problem with Consideration of Elastic Deformation and Cavitation. Lubricants 2022, 10, 311. [Google Scholar] [CrossRef]
- Patir, N.; Cheng, H.S. An Average Flow Model for Determining Effects of Three-Dimensional Roughness on Partial Hydrodynamic Lubrication. J. Lubr. Technol. 1978, 100, 12–17. [Google Scholar] [CrossRef]
- Letalleur, N.; Plouraboué, F.; Prat, M. Average Flow Model of Rough Surface Lubrication: Flow Factors for Sinusoidal Surfaces. J. Tribol. 2002, 124, 539–546. [Google Scholar] [CrossRef]
- Dowson, D.; Higginson, G.R. Elasto-Hydrodynamic Lubrication: The Fundamentals of Roller and Gear Lubrication; Pergamon Press: London, UK, 1966. [Google Scholar]
- Wu, S.R. A penalty formulation and numerical approximation of the Reynolds-Hertz problem of elastohydrodynamic lubrication. Int. J. Eng. Sci. 1986, 24, 1001–1013. [Google Scholar] [CrossRef]
- Elrod, H.G. Titel. J. Lubr. Technol. 1981, 103, 350–354. [Google Scholar] [CrossRef]
- Bair, S. The high pressure rheology of some simple model hydrocarbons. Proc. Inst. Mech. Eng. Part J. Eng. Tribol. 2002, 216, 139–149. [Google Scholar] [CrossRef]
- Roelands, C.J.A. Correlational Aspects of the Viscosity-Temperature-Pressure Relationship of Lubricating Oils. Doctoral Thesis, Technical University of Delft, Delft, The Netherlands, 1966. [Google Scholar]
- Ferziger, J.H.; Peric, M. Numerische Strömungsmechanik; Springer: Berlin/Heidelberg, Germany, 2008. [Google Scholar]
- Boresi, A.P.; Schmidt, R.J. Advanced Mechanics of Materials, 5th ed.; John Wiley & Sons: Hoboken, NJ, USA, 1993. [Google Scholar]
- Saad, Y. Iterative Methods for Sparse Linear Systems; Society for Industrial and Applied Mathematics: Philadelphia, PA, USA, 2003. [Google Scholar]
- Findeisen, D.; Helduser, S. Ölhydraulik; (6.Auflage); Springer: Berlin/Heidelberg, Germany, 2014. [Google Scholar]
- Hu, Y.Z.; Tonder, K. Simulation of 3-D random rough surface by 2-D digital filter and fourier analysis. Int. J. Mach. Tools Manuf. 1992, 32, 83–90. [Google Scholar] [CrossRef]
- Arthur, F.; Noël, B. A hybrid method for fast and efficient rough surface generation. Proc. Inst. Mech. Eng. Part J. Eng. Tribol. 2015, 230, 747–768. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Unit | Parameter | Value | Unit |
| N/m2 | m2/N | ||||
| F | N | [22] | 1 | ||
| 4 | 1 | N s/m2 | |||
| m | 853 | kg/m3 | |||
| m/s |
| in μm | in MPa | ||
| 0.1626 | 0.0142 | −0.5397 | 159.0373 |
| 0.1769 | 0.0583 | −0.4005 | 133.2646 |
| 0.2115 | 0.2616 | −0.2123 | 87.8586 |
| 0.2545 | 0.5316 | −0.0846 | 49.5630 |
| 0.3117 | 0.7519 | −0.0144 | 22.5594 |
| 0.3859 | 0.8752 | 0.0105 | 8.5413 |
| 0.5626 | 0.9564 | 0.0119 | 0.0771 |
| 0.7499 | 0.9746 | 0.0068 | 0 |
| 0.9374 | 0.9833 | 0.0043 | 0 |
| 1.1249 | 0.9882 | 0.0030 | 0 |
| 1.3124 | 0.9912 | 0.0022 | 0 |
| W | U | G | ||||||||
| 1 | 4972 | 34 | ||||||||
| 2 | 4972 | |||||||||
| 3 | 4972 | |||||||||
| 4 | 4972 | |||||||||
| 6 | 4972 | |||||||||
| 8 | 4972 | |||||||||
| n | Number of Iterations | Solution Time | Time per Iteration | |||
| Smooth | Rough | Smooth | Rough | Smooth | Rough | |
| 10 | 31 | 30 | 0.92355 | 1.848 | 0.029792 | 0.061601 |
| 15 | 32 | 32 | 2.2888 | 5.2206 | 0.071526 | 0.16314 |
| 20 | 31 | 30 | 5.8159 | 15.033 | 0.18761 | 0.50111 |
| 25 | 29 | 30 | 11.056 | 29.999 | 0.38125 | 0.99998 |
| 30 | 29 | 30 | 21.28 | 67.131 | 0.73378 | 2.2377 |
| 35 | 29 | 30 | 36.181 | 123.41 | 1.2476 | 4.1136 |
| 40 | 29 | 30 | 60.634 | 227.51 | 2.0908 | 7.5836 |
| 45 | 29 | 30 | 91.972 | 414.36 | 3.1714 | 13.812 |
| 50 | 29 | 30 | 142.6 | 730.07 | 4.9173 | 24.336 |
| 55 | 34 | 30 | 231.8 | 1213.4 | 6.8178 | 40.446 |
| 60 | 63 | 30 | 595.41 | 1918.1 | 9.4509 | 63.935 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wettmarshausen, S.; Schwarze, H. A Fully Implicit Coupled Scheme for Mixed Elastohydrodynamic Problems on Co-Allocated Grids. Lubricants 2024, 12, 322. https://doi.org/10.3390/lubricants12090322
Wettmarshausen S, Schwarze H. A Fully Implicit Coupled Scheme for Mixed Elastohydrodynamic Problems on Co-Allocated Grids. Lubricants. 2024; 12(9):322. https://doi.org/10.3390/lubricants12090322
Chicago/Turabian StyleWettmarshausen, Sören, and Hubert Schwarze. 2024. "A Fully Implicit Coupled Scheme for Mixed Elastohydrodynamic Problems on Co-Allocated Grids" Lubricants 12, no. 9: 322. https://doi.org/10.3390/lubricants12090322
APA StyleWettmarshausen, S., & Schwarze, H. (2024). A Fully Implicit Coupled Scheme for Mixed Elastohydrodynamic Problems on Co-Allocated Grids. Lubricants, 12(9), 322. https://doi.org/10.3390/lubricants12090322