Dynamic Temperature Prediction on High-Speed Angular Contact Ball Bearings of Machine Tool Spindles Based on CNN and Informer

 , , ,
, , ,
Abstract
1. Introduction
2. Temperature Rise Prediction Model Training Set Data Sources
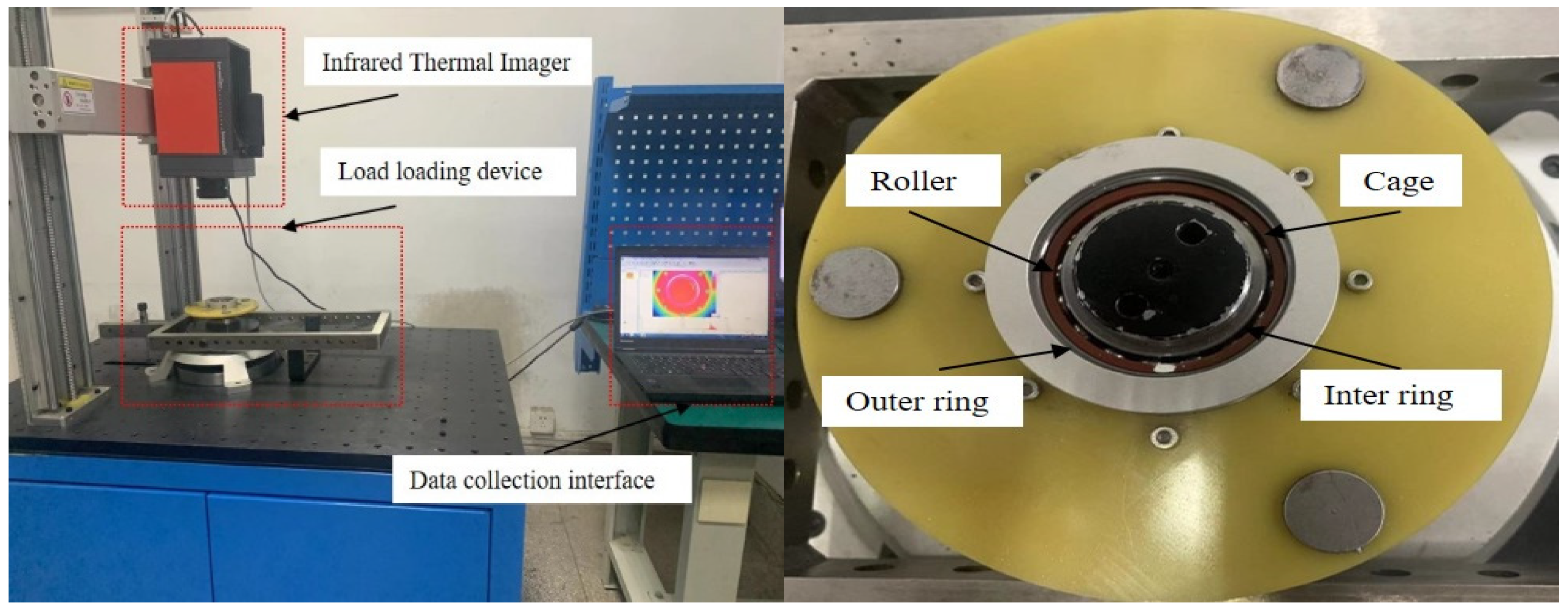
2.1. Experimental Data Sources
- Preliminary preparation: Assess the condition of the spindle drive device, axial loading device, infrared thermal imager, and other equipment to ensure the safety, reliability, and clear image display in the experimental process.
- Experimental bearing installation: Identify the type of the target bearing for the experiment and proceed with the installation of the experimental bearing.
- Determine the test condition: Establish the preload axial force and motor rotational speed based on the specific objectives of the experiment.
- Data acquisition: Adjust the parameters, such as the emissivity of the infrared thermal imager, set the sampling frequency, and complete the experimental data acquisition.
2.2. Simulation Data Sources
- (1)
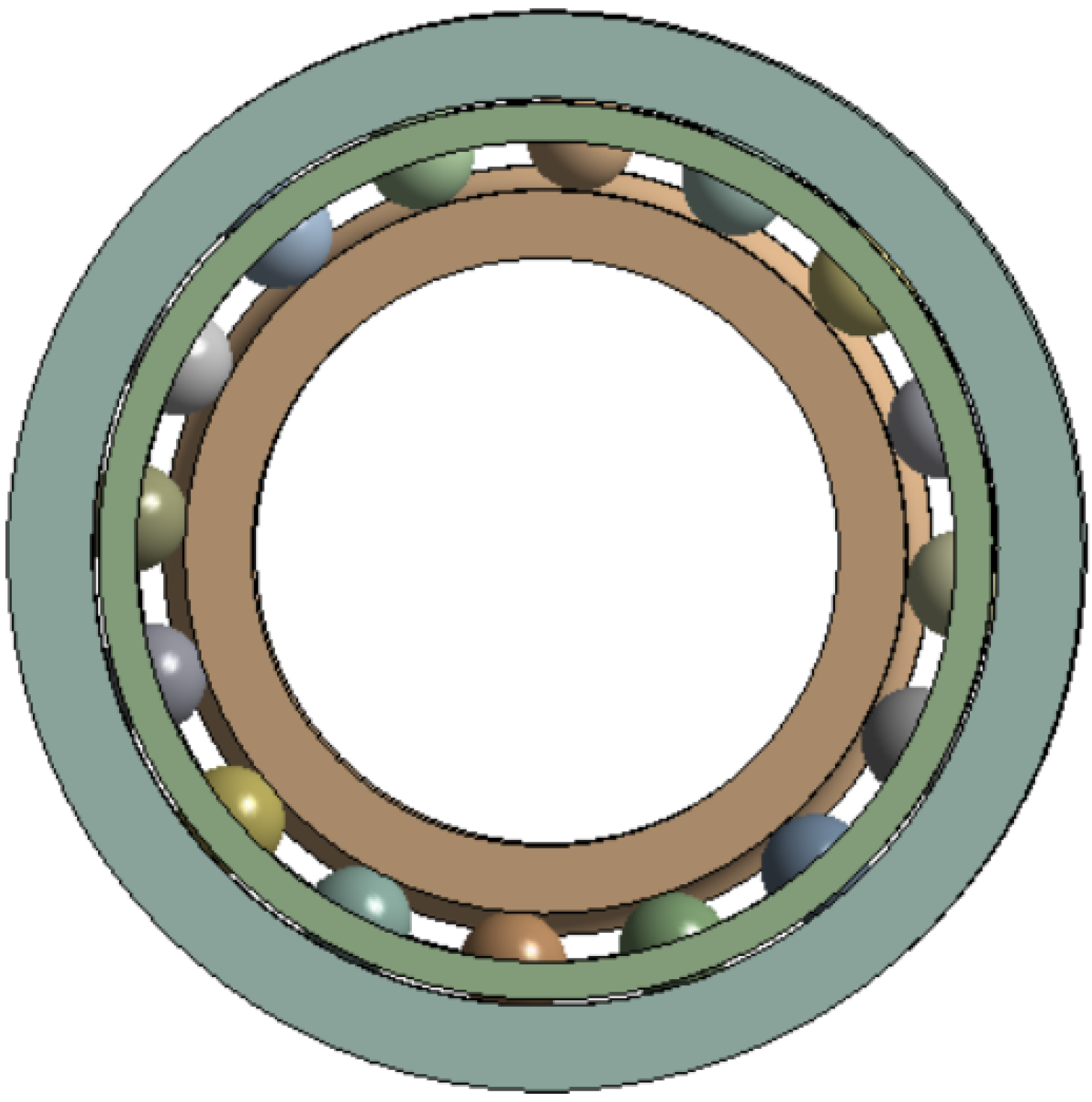
- Simulation model
- Model building: Establish a 3D simulation model based on bearing geometry information and material parameters.
- Heat generation calculation: Determine the test conditions and each bearing component’s heat generation.
- Pre-processing: Given the boundary conditions, such as heat convection, heat flow, etc., set the time step and initial temperature.
- Post-processing: Start the transient temperature field simulation, save, and analyze the simulation results.
- (2)
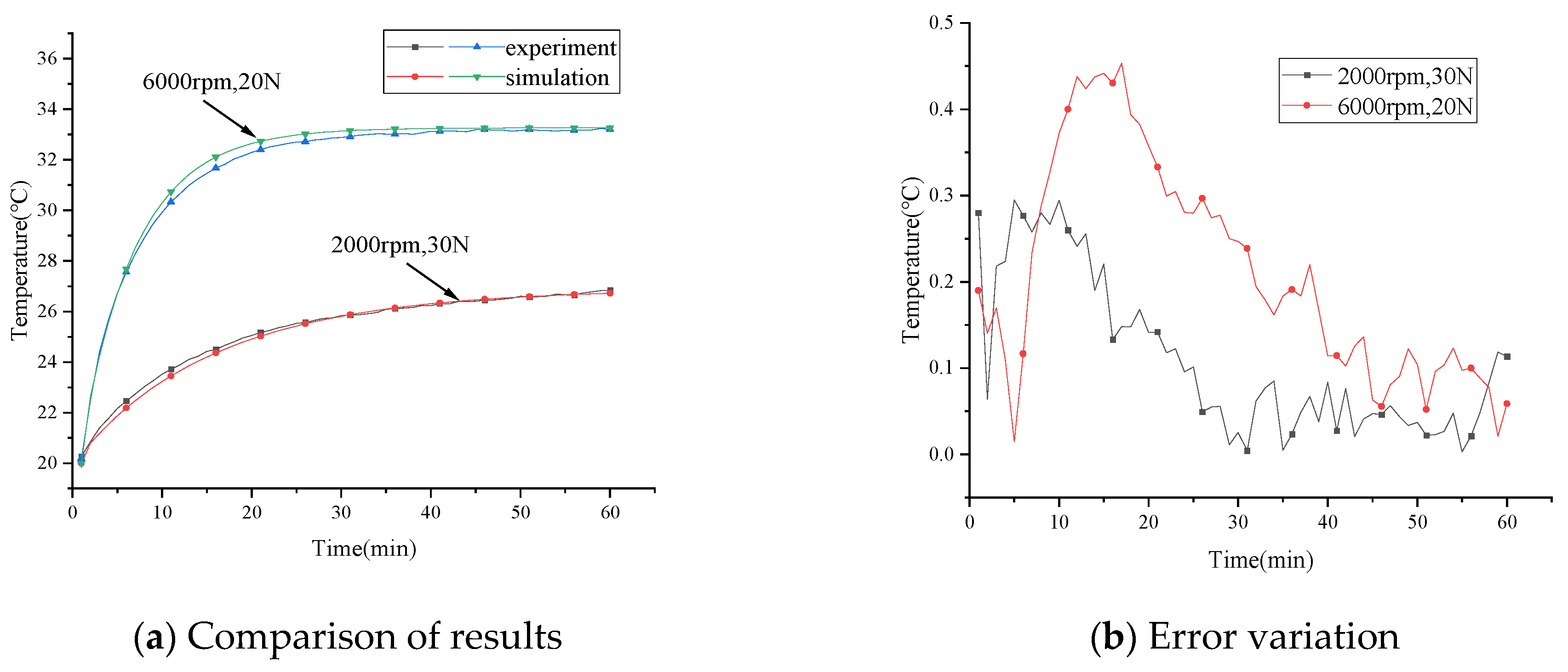
- Validation
3. Bearing Temperature Rise Prediction Based on CNN and Informer Combination Method
3.1. Convolutional Neural Networks
3.2. Informer Model
3.3. CNN + Informer Bearing Temperature Rise Prediction Model
4. Results and Discussion
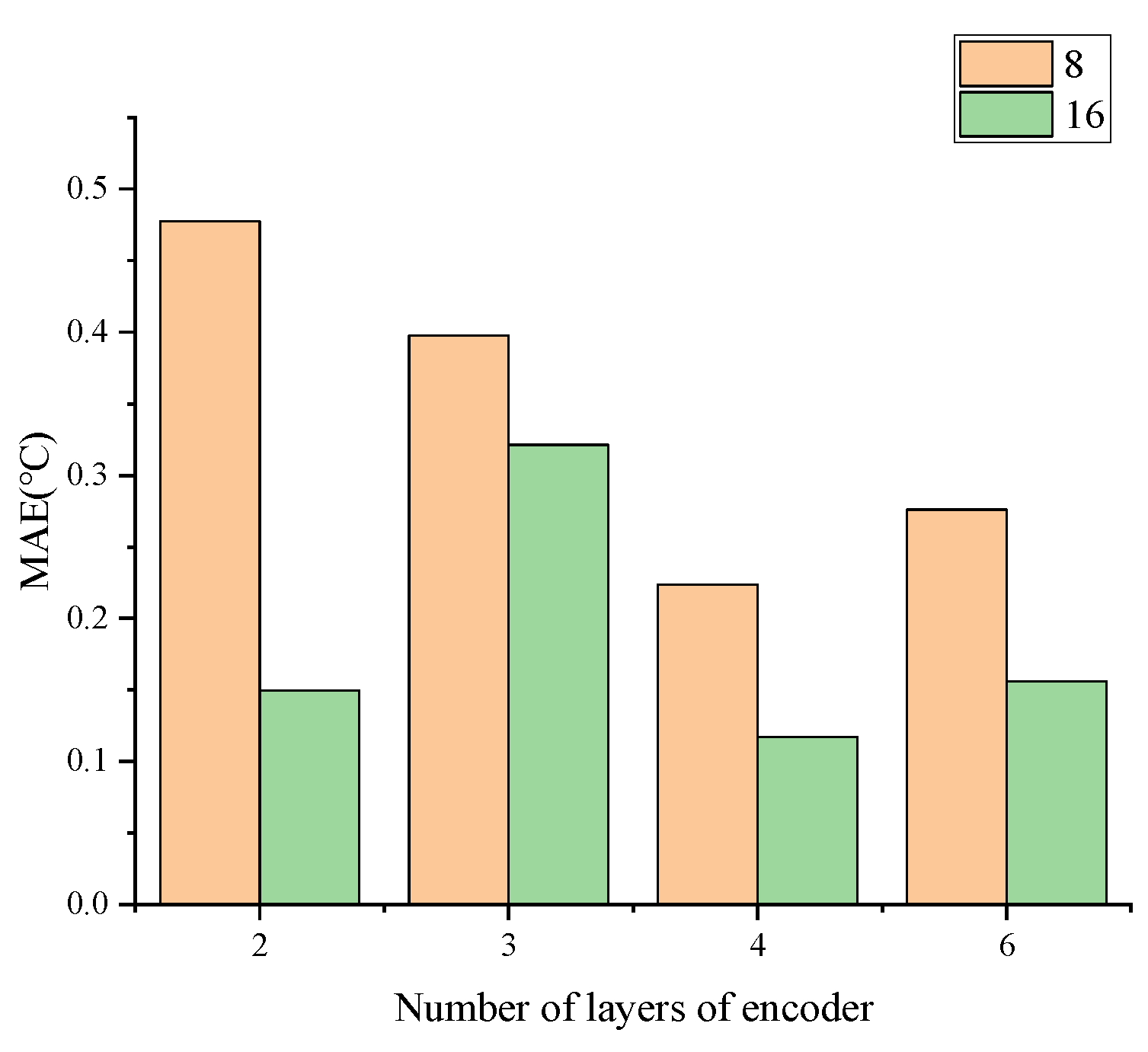
4.1. Parameter Optimization
4.2. Comparison and Analysis of Prediction Results
4.2.1. Model Prediction Results with Varying Rotational Speeds
4.2.2. Model Prediction Results with Varying Load
4.2.3. Experimental Data Prediction Results and Analysis
4.3. Generalization Ability Experiment
5. Conclusions
- (1)
- The proposed simulation model for the temperature field of angular contact ball bearings demonstrated an error of less than 0.5 °C when compared to the experimental results. This finding suggests that the simulation data exhibit high reliability and fulfill the requirements for training samples in the prediction model.
- (2)
- Compared to LSTM and Informer, the optimized CNN + Informer model achieved higher accuracy and prediction stability. It achieved errors within 0.5 °C for multiple operating conditions and showed no variation trend with changing operating conditions.
- (3)
- For operating conditions outside the dataset, the model predicted errors within 0.5 °C and 0.2 °C during the temperature rise and steady-state stages, respectively. This suggests that the prediction error decreases over time, providing further evidence for the model’s generalization ability and effectiveness.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ma, S.; Yin, Y.; Chao, B.; Yan, K.; Fang, B.; Hong, J. A Real-time Coupling Model of Bearing-Rotor System Based on Semi-flexible Body Element. Int. J. Mech. Sci. 2023, 245, 108098. [Google Scholar] [CrossRef]
- Fang, B.; Zhang, J.; Hong, J.; Yan, K. Research on the nonlinear stiffness characteristics of double-row angular contact ball bearings under different working conditions. Lubricants 2023, 11, 44. [Google Scholar] [CrossRef]
- Popescu, A.; Houpert, L.; Olaru, D.N. Four approaches for calculating power losses in an angular contact ball bearing. Mech. Mach. Theory 2020, 144, 103669. [Google Scholar] [CrossRef]
- Kim, K.-S.; Lee, D.-W.; Lee, S.-M.; Hwang, J.-H. A numerical approach to determine the frictional torque and temperature of an angular contact ball bearing in a spindle system. Int. J. Precis. Eng. Manuf. 2015, 16, 135–142. [Google Scholar] [CrossRef]
- Xu, J.; Zhang, J.; Huang, Z.; Wang, L. Calculation and finite element analysis of the temperature field for high-speed rail bearing based on vibrational characteristics. J. Vibroeng. 2015, 17, 720–732. [Google Scholar]
- Deng, X.; Fu, J.; Zhang, Y. A predictive model for temperature rise of spindle–bearing integrated system. J. Manuf. Sci. Eng. 2015, 137, 021014. [Google Scholar] [CrossRef]
- Wu, L.; Tan, Q. Thermal characteristic analysis and experimental study of a spindle-bearing system. Entropy 2016, 18, 271. [Google Scholar] [CrossRef]
- Zheng, D.; Chen, W.F. Effect of structure and assembly constraints on temperature of high-speed angular contact ball bearings with thermal network method. Mech. Syst. Signal Process. 2020, 145, 106929. [Google Scholar] [CrossRef]
- Li, Z.; Zhao, C.; Lu, Z.; Liu, F. Thermal Performances Prediction Analysis of High Speed Feed Shaft Bearings Under Actual Working Condition. IEEE Access 2019, 7, 168011–168019. [Google Scholar] [CrossRef]
- Zhang, C.; Guo, D.; Tian, J.; Niu, Q. Research on the influencing factors of thermal characteristics of high-speed grease lubricated angular contact ball bearing. Adv. Mech. Eng. 2021, 13, 16878140211027398. [Google Scholar] [CrossRef]
- Yan, G.; Yu, C.; Bai, Y. Wind turbine bearing temperature forecasting using a new data-driven ensemble approach. Machines 2021, 9, 248. [Google Scholar] [CrossRef]
- Liu, Y.Z.; Zou, Y.S.; Wu, Y. A novel abnormal detection method for bearing temperature based on spatiotemporal fusion. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2022, 236, 317–333. [Google Scholar] [CrossRef]
- Chen, Y.; Zhang, C.; Zhang, N.; Chen, Y. Multi-task learning and attention mechanism based long short-term memory for temperature prediction of EMU bearing. In Proceedings of the 2019 Prognostics and System Health Management Conference (PHM-Qingdao), Qingdao, China, 25–27 October 2019; pp. 1–7. [Google Scholar]
- Xiao, X.; Liu, J.; Liu, D.; Tang, Y.; Dai, J.; Zhang, F. SSAE—MLP: Stacked sparse autoencoders-based multi-layer perceptron for main bearing temperature prediction of large-scale wind turbines. Concurr. Comput. Pract. Exp. 2021, 33, e6315. [Google Scholar] [CrossRef]
- Ariyo, A.A.; Adewumi, A.O.; Ayo, C.K. Stock price prediction using the ARIMA model. In Proceedings of the 2014 UKSim-AMSS 16th International Conference on Computer Modelling and Simulation, Cambridge, UK, 26–28 March 2014; pp. 106–112. [Google Scholar]
- Zhang, Y.; Sun, H.; Guo, Y. Wind power prediction based on PSO-SVR and grey combination model. IEEE Access 2019, 7, 136254–136267. [Google Scholar] [CrossRef]
- Cui, K.; Jing, X. Research on prediction model of geotechnical parameters based on BP neural network. Neural Comput. Appl. 2019, 31, 8205–8215. [Google Scholar] [CrossRef]
- Lukoševičius, M.; Jaeger, H. Reservoir computing approaches to recurrent neural network training. Comput. Sci. Rev. 2009, 3, 127–149. [Google Scholar] [CrossRef]
- Yu, Y.; Si, X.; Hu, C.; Zhang, J. A review of recurrent neural networks: LSTM cells and network architectures. Neural Comput. 2019, 31, 1235–1270. [Google Scholar] [CrossRef]
- Fan, C.; Zhang, Y.; Pan, Y.; Li, X.; Zhang, C.; Yuan, R.; Wu, D.; Wang, W.; Pei, J.; Huang, H. Multi-horizon time series forecasting with temporal attention learning. In Proceedings of the 25th ACM SIGKDD International Conference on Knowledge Discovery & Data Mining, Anchorage, AK, USA, 4–8 August 2019; pp. 2527–2535. [Google Scholar]
- Zhou, H.; Zhang, S.; Peng, J.; Zhang, S.; Li, J.; Xiong, H.; Zhang, W. Informer: Beyond efficient transformer for long sequence time-series forecasting. In Proceedings of the AAAI Conference on Artificial Intelligence, Virtual, 2–9 February 2021; Volume 35, pp. 11106–11115. [Google Scholar]
- Gong, M.; Zhao, Y.; Sun, J.; Han, C.; Sun, G.; Yan, B. Load forecasting of district heating system based on Informer. Energy 2022, 253, 124179. [Google Scholar] [CrossRef]
- Yang, Z.; Liu, L.; Li, N.; Tian, J. Time series forecasting of motor bearing vibration based on informer. Sensors 2022, 22, 5858. [Google Scholar] [CrossRef] [PubMed]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | GCr15 (Rings) | Si3N4 (Rollers) | Pi (Cage) |
|---|---|---|---|
| Density | 7800 | 3200 | 1120 |
| Modulus of elasticity | 208 | 300 | 300 |
| Poisson’s ratio | 0.3 | 0.26 | 0.34 |
| Thermal conductivity | 40 | 11 | 0.15 |
| Specific heat capacity | 450 | 800 | 1250 |
| Parameter Name | Parameter Value |
|---|---|
| Number of convolution layers | 2 |
| Convolution kernel size | 3 × 1/2 × 1 |
| Number of convolution kernels | 1~10/1~20 |
| Number of encoder layers | 3, 4, 6 |
| Number of decoder layers | 2 |
| Head number of multi-head attention | 8, 16 |
| Model | Convolutional Layer 1 Number of Convolutional Kernels | Convolutional Layer 2 Number of Convolutional Kernels | MAE/°C |
|---|---|---|---|
| CNN | 1 | 20 | 0.6263 |
| 3 | 1 | 0.6125 | |
| 1 | 2 | 0.6005 | |
| 2 | 15 | 0.5963 | |
| 4 | 1 | 0.4775 |
| Model | Parameter Name | Parameter Value |
|---|---|---|
| CNN | Number of convolution layers | 2 |
| Convolution kernel size | 3 × 1/2 × 1 | |
| Number of convolution kernels | 4/1 | |
| Informer | Number of encoder layers | 4 |
| Number of decoder layers | 2 | |
| Head number of multi-head attention | 16 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, H.; Liu, C.; Yang, F.; Ma, X.; Guo, N.; Sui, X.; Wang, X. Dynamic Temperature Prediction on High-Speed Angular Contact Ball Bearings of Machine Tool Spindles Based on CNN and Informer. Lubricants 2023, 11, 343. https://doi.org/10.3390/lubricants11080343
Li H, Liu C, Yang F, Ma X, Guo N, Sui X, Wang X. Dynamic Temperature Prediction on High-Speed Angular Contact Ball Bearings of Machine Tool Spindles Based on CNN and Informer. Lubricants. 2023; 11(8):343. https://doi.org/10.3390/lubricants11080343
Chicago/Turabian StyleLi, Hongyu, Chunyang Liu, Fang Yang, Xiqiang Ma, Nan Guo, Xin Sui, and Xiao Wang. 2023. "Dynamic Temperature Prediction on High-Speed Angular Contact Ball Bearings of Machine Tool Spindles Based on CNN and Informer" Lubricants 11, no. 8: 343. https://doi.org/10.3390/lubricants11080343
APA StyleLi, H., Liu, C., Yang, F., Ma, X., Guo, N., Sui, X., & Wang, X. (2023). Dynamic Temperature Prediction on High-Speed Angular Contact Ball Bearings of Machine Tool Spindles Based on CNN and Informer. Lubricants, 11(8), 343. https://doi.org/10.3390/lubricants11080343