1. Introduction
Recently there has been some progress both in the measurement of galactic halo magnetic fields ([
1,
2]), and in the analytic theory of corresponding mean field galactic dynamos. A summary and references to earlier work can be found in [
3], while recent analytic developments, using the assumption of scale invariance to treat the 3D problem, can be found in a series of papers [
4,
5,
6]. These papers mostly start from the classical mean field theory [
7], and study both axially symmetric dynamo fields and spirally bi-symmetric fields.
The scale invariant models succeed in predicting many of the new observations, some of which were known previously [
8,
9,
10,
11]), but some of which are only recently being detected [
12,
13] and represent genuine predictions. There is some evidence ([
14], but see also [
15]), that global magnetic fields may be axially symmetric as well as bi-symmetric. We focus on axially symmetric dynamos in this paper.
The strengths of even the organized (mean) magnetic fields can be surprisingly strong ([
16]) being on average close to 10
G in the disc of spiral galaxies. It seems that these fields fall off in strength only gradually with height in the halo as is the case for NGC 891 ([
17]), UGC10288 ([
18]), and more recently ([
19]). The consequent magnetic energy density in the galactic halo is of the same order or perhaps slightly greater than that of the hot halo gas. This suggests that, just as in the solar corona, the magnetic field may be force-free on average.
Dynamo action to produce such a force-free field is due either to a macroscopic velocity field or to a sub scale combination of turbulent generation and diffusion. The macroscopic velocity field would include large scale rotation and either halo inflow or outflow (e.g., [
20]). Either the macroscopic flow or the sub scale turbulence may dominate the corresponding magnetic field. Consequently we expect dynamo action to gradually destroy the force-free aspect of the magnetic field. We do find this to be true in our arguments below after a finite time, starting from an initial force-free field. However, if indeed the field evolves to become energetically dominant, it could relax again to the force-free minimum energy condition with the dissipation of magnetic energy. Then the dynamo action would repeat and thus create a cyclic evolution of the galactic field, wherein there is always a period of force-free magnetic field.
In a force-free magnetic field, current must flow mainly parallel to the magnetic field. If there is a slight velocity difference between the ions and the electrons, winds of cosmic rays with small enough radius of gyration (that is a maximum energy) can produce such a current. Cosmic rays are produced in association with the sub scale turbulence driven by star formation and super novae that is necessary to the dynamo. This may be a mechanism for producing an initial nearly force-free field. These issues will appear more explicitly below, after our study of the geometry of force-free magnetic fields.
In any case in this paper we return to the notion of a force-free magnetic field and interacting dynamo ([
7]). In the example studied by Moffat only the so called linear force-free magnetic field (a constant ‘current function’ that relates the current density to the field strength) was permitted and there was no velocity field. A simple formula for the time dependence of the field was given.
Our main interest is also in the time dependence of the linear force-free dynamo, but when a non-zero velocity field exists throughout the volume. This leads to a closed result for the time dependent linear force-free dynamo that should hold for a reasonable time. Some discussion of a non linear force-free dynamo is given when the velocity term is unimportant. There is also an approximate non force-free dynamo when it is the vector potential that satisfies a Beltrami condition. This also operates for a finite time.
The steady force-free magnetic field is also of interest, especially when applied to the magnetic fields in the halos of galaxies ([
16,
21]). The classic dynamo equation is not compatible with a steady force-free dynamo, so that any such field must be regarded as the result of more general magneto-hydrodynamics (MHD). This unknown flow must result in a dynamical stationary state wherein the Amperian force is unimportant. We give a simple example with incompressible Beltrami flow (i.e., the curl of the velocity is parallel to the velocity) provided the flow is also parallel to the magnetic field. The force-free field may be either linear or non linear, when we ignore its origin in this way.
The non linear (non constant current function) force-free magnetic can be studied analytically in axial symmetry. A separated 2D solution has been known in solar physics since the work of Low and Lou ([
22] (see also [
23,
24]). We find that the basic equations can be expressed quite simply and generalize ([
22]) to non separated solutions. We show also that the Low and Lou solutions are a sub-set of our scale invariant solutions, and make a detailed correspondence between the two approaches. We use both the general and the scale invariant formulations to present some intriguing examples that may apply either to solar active regions, or to the MHD ‘bubbles’ or ‘domes’ detected over the nuclei of spiral galaxies (e.g., NGC 3079 [
25]). The polarized flux is seen to trace the nuclear outflow in the case of NGC3079. Recent applications of the Low and Lou solutions may be found in ([
23]). Our scale invariant solutions generalize these possibilities slightly.
In
Section 2 below we give our formulation of the non linear, axially symmetric, force-free, magnetic field, including a scale invariant version (see e.g., [
5]). In the latter case a detailed comparison with ([
22]) is given. In
Section 3 we show illustrative examples. These are not applications to data, but are meant only to stimulate more detailed work based on the formulation given here. In
Section 4 we consider when these non linear force-free magnetic fields can be maintained by classical dynamos. This section contains a formal description of magnetic helicity and a suggestion for how the magnetic helicity propagates in a two level system. The idea is pursued for linear force-free dynamos in
Section 5.
The discussion of the linear evolving force-free dynamo with induced electric field is also found in
Section 5. Application to the sub scale leads to a natural estimate for the velocity helicity that creates the
dynamo. Interestingly, the consequent induced electric field is delayed in time.
A brief
appendix considers the linear force-free steady dynamo in an approach compatible with the non linear examples and shows an example of the field.
3. Some Non Linear Force Free Dynamo Fields
3.1. Scale Invariant Examples
We refer to the first of Equation (
14) and set the similarity class
. This choice implies that a global constant with the Dimension of magnetic field exists, and this constant may be identified with the value of the field at fixed
x. In the presence of dynamics, such a global constant is also consistent with a constant linear velocity such as that of the disc of a spiral galaxy.
Equation (
10) shows that there is no radial dependence on the magnetic field and therefore
. The current in the
z direction is
by Equation (
13) and
by Equation (
10). Clearly there is no limit on the integrated energy of the field unless it is cut off at a finite radius. This cut requires boundary conditions connecting to an external potential field involving surface currents and forces that we will not consider here.
Setting
the Equation (
14) for
becomes
This has the solution
which must be positive in the domain of interest. By examining the limits at
and
we see that
and
should both be positive above the plane. The field does not recognize the plane
as a boundary. Hence in any application to a spiral galaxy the field in the upper half plane should be reflected into the lower half plane with a sign change. This yields a dipolar symmetry across the equator. If the reflection is carried out without a sign change then one obtains quadrupolar symmetry across the disc plane. There has to be a surface current in the plane (volume current density integrated through the disc) to allow the dipolar boundary condition, but the two sides of the plane are quite disconnected with the quadrupolar symmetry. It is interesting to note that quadrupolar symmetry arises in the only analytic scale invariant MHD collapse solution ([
27,
30]).
The dipolar procedure maintains the normal component of the field continuous and changes the sign on the tangential components, while the quadrupole symetry reverses only the sign of the normal component. In a one-sided application, such as above an active region on the sun, the upper half plane solution suffices.
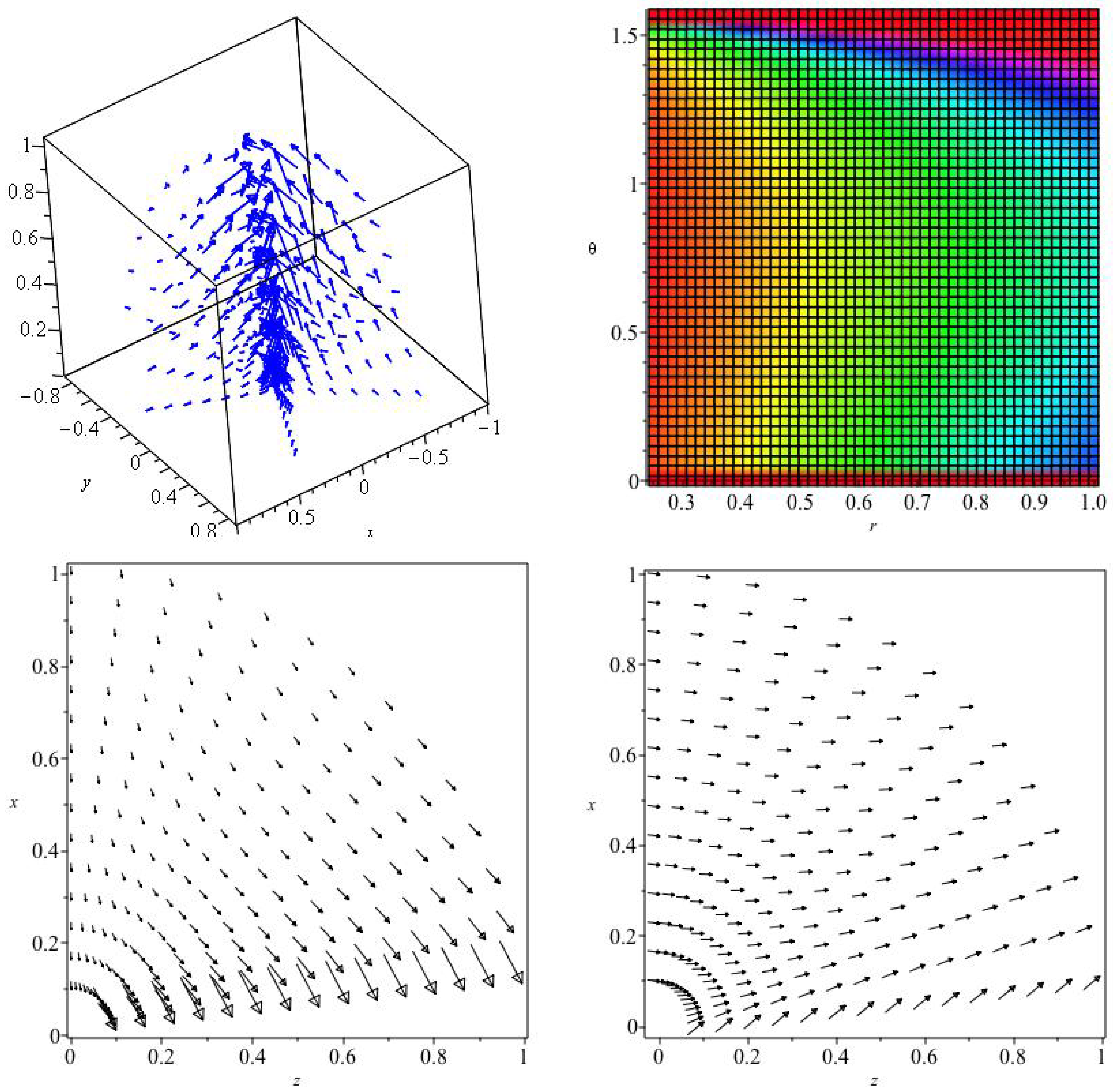
Solution (
23) describes a magnetic field that is a function of angle only. We show some relevant properties in
Figure 1. The three dimensional panel at upper left in the figure has the two independent solutions at equal amplitude
. It shows dome like structure (cf NGC 3079 in [
25]) with the field circling the polar axis. The polar circling (an axial current) is due to the
solution while the dome structure can appear in both solutions. The panel at lower right shows a dominant
solution with
. The field is clearly ‘X shaped’ (cf [
1]) in projection up to a limiting angle from the plane. No such behaviour occurs in the other limit where the
solution dominates as is shown at lower left where
.
The panel at upper right indicates the variation in the z axial current function for the case in the upper half plane. It varies substantially, declining by about a factor five starting from the axis in radius and by about a factor five at the polar angle extremes. However there are extensive ‘plateaus’ where q is roughly constant. We shall see that non linear force-free dynamo action may persist in such regions.
The total current flows parallel to the field lines by construction. The dome like structure, the X type field, the strong and variable axial current are the physical distinctions of this solution. The scale invariant field with class has no dependence on radius (although it varies strongly with x). However, dynamo action to evolve the field will be efficient mainly in the separate plateau regions. This can create an effective variation with radius. Such a magnetic field might be created by a nuclear jet (perhaps as in NGC3079), providing the jet creates a strong current on the polar axis.
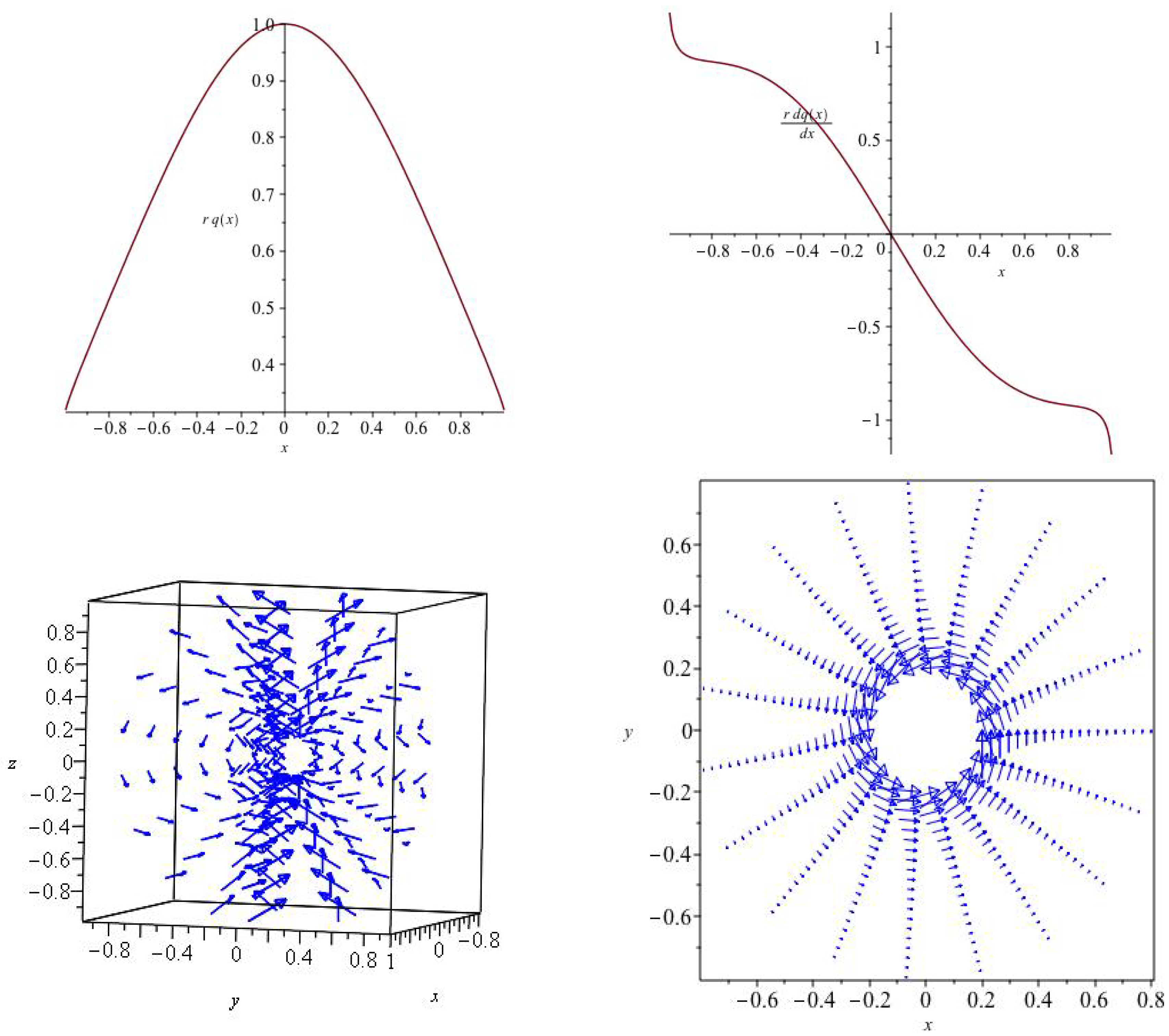
As perhaps a more physical example (the integrated field energy is finite without a boundary) we look briefly at the limiting case when
. This choice implies a global constant with Dimensions
, that is possibly a constant magnetic flux. The second of Equation (
14) can be written as two linear equations and easily integrated numerically. We present only a two-sided example in
Figure 2.
The upper left panel shows the variation of with the cosine of the polar angle. It is symmetric about the equator which implies that the current does not change sign on crossing the equator. The azimuthal and poloidal components of the magnetic field do not change sign, but the radial component does. This can be seen at upper right where the graph shows the angular derivative, d that is proportional to the radial magnetic field. This passes through zero on the equator in this symmetric solution.
At lower left the vectors of the magnetic field multiplied by are shown in three Dimensions. A projected ‘X type’ magnetic field might be observed near the polar axis in the polarized radio flux, but at larger angles the field is seen to be more dipolar in projection. There is however in addition an azimuthal component of the field, which the panel at lower right displays in the equator of the solution (where the radial field vanishes). This figure includes the radial inverse square decline with radius. Thus, only the X type field near the polar axis may be strong enough to be observed. The axis may also of course be the location of a double ‘jet’ (i.e., collimated) outflow.
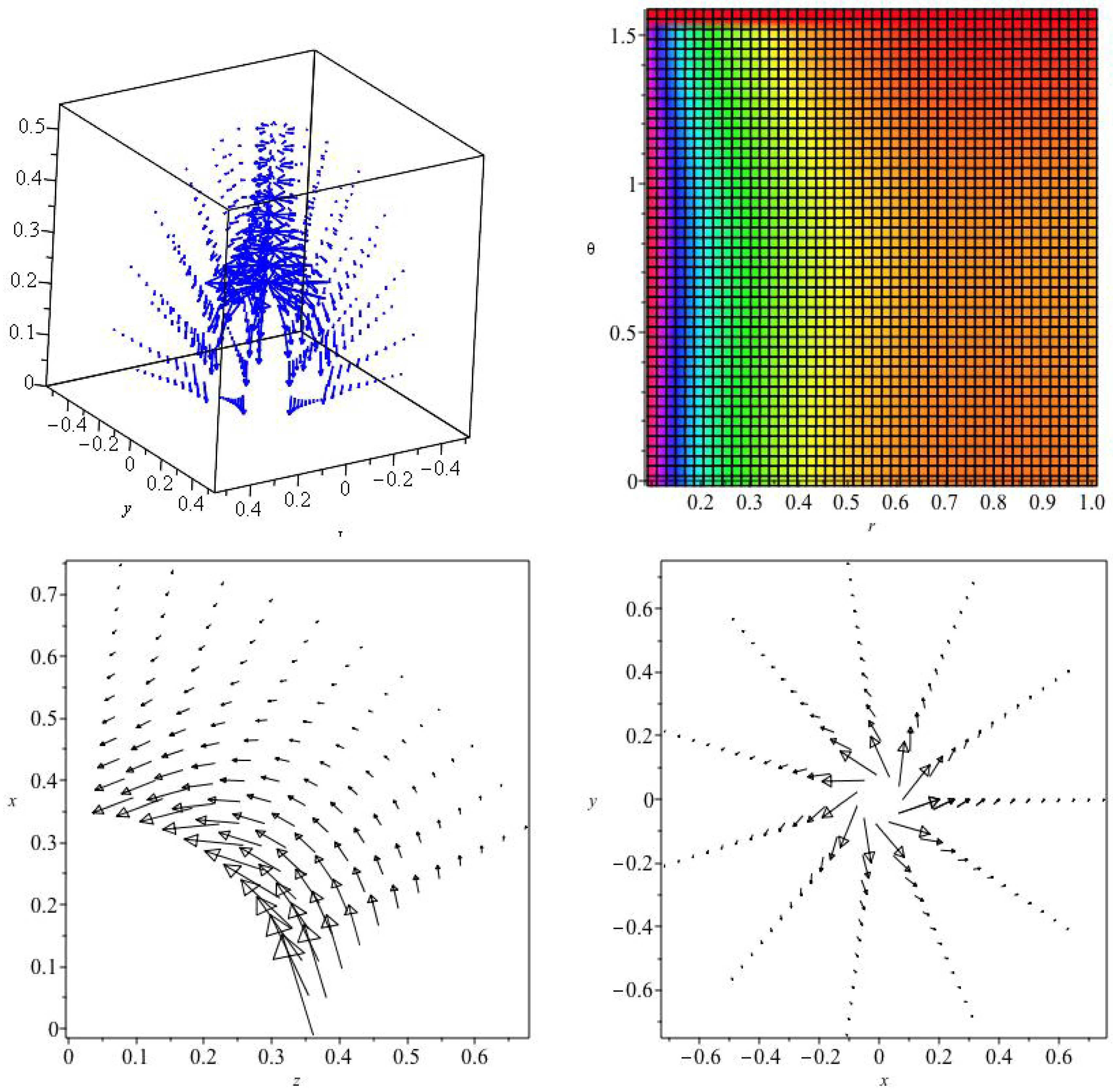
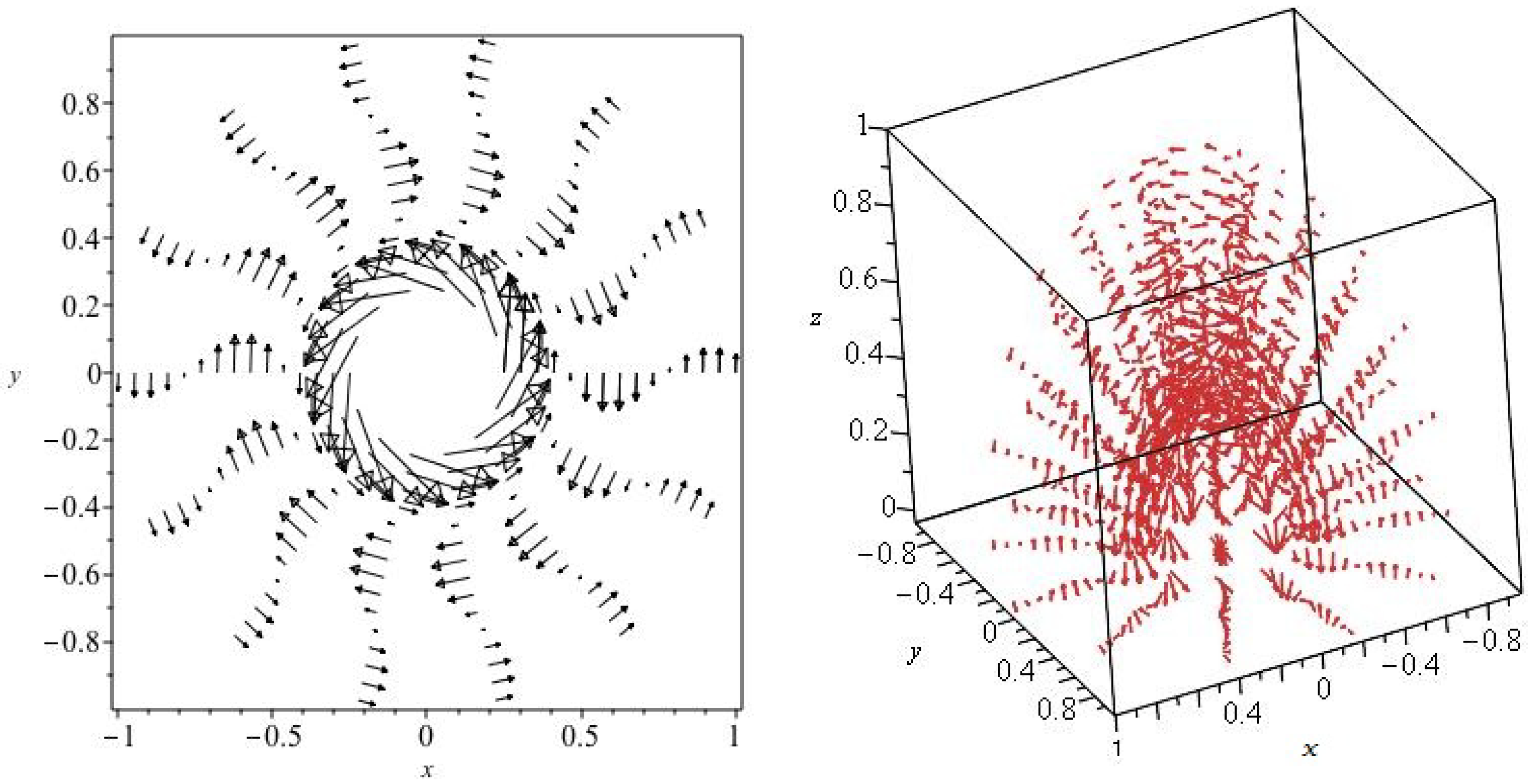
3.2. Non Scale Invariant Example
We consider the non scale invariant example summarized in Equation (
9). The general solution requires the application of boundary conditions in radius and poloidal angle. However a plausible solution is found when only one ‘mode’ is included, namely the term with the separation constant equal to 2. This gives a solution of Equation (
9) in the form
where
is the hypergeometric function. Note that this solution is completely symmetric under
so long as
below the plane. Only the radial magnetic field (and hence the radial current) will change sign due to the differentiation with respect to
x. This will give double magnetic bubbles across the plane in a galaxy context. From Equation (
8) we obtain
. The magnetic fields follow from Equations (
3), (
4) and (
6).
If the negative square root were extracted on crossing the plane, both and would change sign and we would have dipolar symmetry. It is not possible to have a global quadrupolar symmetry with this mode. However one can construct a quadrupolar solution, just as with the solution of the previous section, by reflecting the field above the plane in the plane without a sign change.
In
Figure 3 we show several examples chosen more or less at random from the constants
. Many other possibilities exist, including pure ‘X type’ fields, but such exploration is not the main purpose of this paper, which in these sections is mainly to demonstrate a useful formulation of the force-free magnetic field.
Although now we do not have scale invariance (note the strong variation in radius and polar angle), we do find similar dome structure and axial current in the upper left panel that may be associated with a jet. At upper right the reciprocal of the current function is plotted. The distribution of j gives an effective local spatial scale of the force free field. Once again there are plateaus, but j varies globally by about a factor 2. For the parameters chosen, the poloidal structure at lower left is purely dome like with no ‘X type’ behaviour. However a systematic study would show that there are many variations about this structure. The field vectors are shown reacting to the large axial current (also large spatial scale) at upper left and at lower right of the figure.
In the
Appendix A Figure A1 we show one mode of a linear force-free magnetic field. There is no scale invariant solution, but the dome-like field structure is quite similar to scale invariant fields in that it produces the ‘dome like’ structure. It differs however by producing an axially symmetric azimuthal field that nevertheless oscillates in radius (c.f. [
12]).
5. Time Dependent Force-Free Dynamo: II-Linear
We consider a linear force-free dynamo field that is driven by a macroscopic velocity field plus (isotropic) sub scale turbulence as manifested in the sub scale velocity helicity and diffusivity. The sub scale turbulence yields an helicity effect plus a diffusivity that might be on slightly different scales.
We recall the classical dynamo equation in the vector potential (
) form ([
5,
7])
where we neglect electrostatic fields. The definition of the electric field
is just to recall basic assumptions. Combining this equation with Equation (
1) assumed to hold initially, even for spatially non constant
q, yields
We drop indications of the time derivative field at for brevity.
This last equation can also be written by defining a damped turbulent helicity,
, as
where
is the unit matrix, and the anti-symmetric matrix
is (
refer to an orthogonal set of unit vectors).
Here
is the fully anti-symmetric permutation symbol. Unfortunately Equation (
36) does not in general guarantee the force-free evolution of an initial force-free magnetic field. We are then constrained to a force-free dynamo limited in time as in
Section 4.2.
For a linear force-free field we may take
2 and so the Equation (
36) for the temporal development of the force-free magnetic field becomes
The solution of this equation can be written in the operator form
where
is an initial force-free field. Here we proceed purely formally with the operator algebra to find and verify the solution, but a somewhat more rigorous derivation of this solution can be found in either ([
26]) or ([
27]). The definition of an exponential matrix as an operator is a well established algebraic method.
At this point neither
u nor
need be uniform in space and both of them, plus the linear
, may be arbitrary functions of time. However this arbitrariness does not gain us much in practice because these functions are unknown without extended dynamical considerations. Moreover, apart from the trivial
, the time dependence does not help with maintaining the field of (
39) force-free. We continue therefore with quantities constant in time.
Equation (
39) (now with integrand constant in time although this is unnecessary) can be written explicitly because
is anti-symmetric. Hence its exponential is given by the Rodrigues formula
where
and varies in space. This leads us from Equation (
39) to the expression
We have used a verifiable property of
namely
and of course
. Equation (
41) represents a generalization of the discussion of force-free linear dynamos given in [
7]). Note that nothing requires the initial force-free magnetic field
to be axially symmetric, although that is the simplest version of the linear field.
Starting from an initial force-free magnetic field we see from Equation (
41) that
the first term continues to generate a force-free field so long as
is spatially constant. We recall that
requires only that
so that neither
nor
need be constant individually. Depending on the sign of finite
u, there is either exponential growth or decay. Setting
that is
, identifies a typical
dynamo number ([
8]).
The more convoluted
second term of Equation (
41) will gradually deviate from the force-free condition as it grows, even if the modulus of the velocity
v is constant. This term is small compared to the first term only if
is small. Thus the dynamo generates a force-free field only for
or
e-folding times. This characteristic time may be nearly 100 Myr on a galactic scale
. However even this estimate may be somewhat pessimistic.
One of the obvious physical questions is to ask how is the dynamo quenched? This can be achieved if, either the current source coefficients
and/or the velocity, decay in time. We see that
(as suggested in
Section 4.2) will stop the exponential growth and leave only the small second term (for small
). So this is a form of quenching, achieved by cycling between distorted growth of a force-free field and subsequent relaxation.
Another possible example of quenching is to hold
v constant in time and
u constant (positive and uniform), but let
in Equation (
38). The detailed physics required is ignored here, but In an infinite dynamo with no characteristic scale, Dimensional analysis suggests that
, where the velocity
w might be either
v or
u or some combination of the two. This implies an increasing spatial scale of the field as it is generated.
Assuming this variation in time, the solution (
41) holds, provided we replace
t by
and
q by
everywhere in the equation. The offending second term may now be kept small if
is small. Here
is an arbitrary time replacing
, that is the time from which we start the dynamo. Formally, the amplitude of
must absorb the factor
.
We require then that for the evolution by force-free dynamo under these conditions. Unless w is substantially greater than v, we must have small, and hence is likely to be small. If in fact , then the growth stops abruptly.
The result of the operation
is also of some interest. One finds (using physical components in spherical polars just for emphasis)
We note that
where
is the initial
induced electric field because
is constant in time. Thus, according to Equation (
41), the evolving field develops an electric field parallel to the magnetic field but it is a ‘delayed electric field’ relative to the current magnetic field. Even if the velocity were time dependent, Equations (
39) and (
41) together indicate that the electric field would depend on the past history of the flow plus the initial force-free linear field.
One should note that the scale of
is not restricted. If we imagine that it is the turbulent scale, then we should set
. In that case we conclude that the turbulent (helical in general) motion generates a ‘delayed’ electric field parallel to the magnetic field on the turbulent scale. This might be a candidate for an explicit ‘
’ effect introduced on the mean field scale. It is an induced electric field similar to the electric field induced by the macroscopic flow. We speculate on this further in
Section 5.2.
5.1. Non Force-Free Dynamo with Beltrami Potential
It is worth remarking that an additional use of our solutions of the force-free equations may be found by assuming that the vector potential obeys
that is we assume that the vector potential is a Beltrami vector field. Taking the Coulomb gauge
, the earlier solutions for the force-free magnetic field apply directly to
. However the magnetic field itself is no longer force-free because
The interesting application is to the classical dynamo Equation (
34) which can be written as
without any constraints on
u or
. To make contact with the results of
Section 5 we write this as
where
This means that the solution for
is given by Equation (
41), but with
replacing
,
replacing
q,
replacing
v and
replacing
. The field must be found subsequently from the curl of this expression.
Unfortunately this solution does not guarantee the Beltrami nature of , which is the same problem that we had with the force-free magnetic dynamo evolution. It requires to be small and to be constant to remain a good approximation. Of course we can set the net velocity to be zero, but then there is no ‘omega’ dynamo because the velocity field diffuses away.
5.2. Effect?
We imagine an initial two scale linear force-free magnetic field. The large scale
is labelled
while the sub scale
is labelled
. On the sub scale there will be no velocity helicity and no diffusivity so that
. The ‘dynamo equation’ on the sub scale will be, on recalling Equation (
35), setting
, and taking total vectors on the scale
We take total quantities and .
From the previous section we know that the solution for the magnetic field can be written, at least initially, as
where
and
In this last expression, the average is over the large scale spatial region.
Formally then we obtain an estimate of the alpha effect by introducing the coefficient
as
This value of
can in principle now be used in Equation (
38) to write an equation for the evolving force-free mean field while using a time varying sub scale helicity
. To achieve a similar expression for the diffusivity would require considering two level dynamical equations. However Dimensional analysis suggests
. This all suggests setting
given our estimate for
. The behaviour is only modulated slightly by the function
F, when the argument is small.
Our considerations can not claim to probe the fundamental theory of dynamo action, for which the literature is rather vast (e.g., [
32]). This is particularly the case because the assumption of a force-free field gradually fails in time. However it is remarkable that a simple model based on the evolution by a classic force-free dynamo reaches a conclusion similar to that inferred by ([
33,
34]). The important conclusion is
that the delayed induced electric field, due to both turbulent and mean flow and field, provides a source for the current dynamo field. This means that the current dynamo field, in a galaxy for example, may depend on both earlier seed fields and ‘seed motion’.
Our next section discusses briefly helicity and its possible cascade between spatial scales. In a brief
appendix we give the formulation of a linear force-free magnetic field in a form compatible with our discussion of the non-linear force-free field.
6. Force-Free Magnetic Helicity
The magnetic helicity transfer and conservation is an important indicator of the physics operating in a magnetic dynamo (e.g., [
7,
35]). The velocity helicity is fundamental to the turbulent dynamo. It is worth considering how this operates in a force-free magnetic field, but we begin with a general discussion of magnetic helicity, provided as always there is no electrostatic field.
The basic classical dynamo Equation (
34) for a generated magnetic field is comprised of Faraday’s equation (no electrostatic field) and the assumed electric field in the forms
This allows us to write the time dependence of the magnetic helicity
using only Faraday’s law as
We have in addition the identity
), and hence we find
We proceed by inserting the classical dynamo version of the electric field (
34) into the first term of Equation (
58), to obtain quite generally
If finally the magnetic field is force-free, this result becomes
The first term in this time dependence is proportional to the production of magnetic energy by the effect at the macroscopic scale minus the diffusive loss. The second term is more subtle. However for a linear force-free field . We see consequently that the second term is proportional to the divergence of the Poynting flux. Integrated over a closed volume. the resulting Poynting flux will vanish integrated over the bounding surface, provided that there is no net energy loss from the volume.
The spatial variation of the magnetic helicity
h is
where
in the force-free case. In a region of linear force-free magnetic field
, and so this becomes
From this result and Equation (
60) one can construct a convective derivative which allows in principle to extend the helicity over the whole space from a set of boundary values. For a non force-free magnetic field we require Equations (
59) and (
61). Rather than regard these results as new equations for the field, the magnetic field is found from Equation (
56), after which the results of this section give the local temporal and spatial variation.
In view of the usual split between the sub scale and the mean field scale, it is of interest to consider both scales as force free and individually linear. If the mean field scale is labelled
and the sub scale
then
where the average is over the macroscopic field scale
and the sub scale average is assumed to vanish when multiplying a macro scale quantity. If both scales are force-free and linear, then substituting for
on each scale gives
Together with Equation (
60) we see that when
the integrated conserved total helicity implies a conserved balance between the sub scale and mean field scale helicity. Equivalently the balance is between the magnetic energy per unit area on each scale. Such balance is to be expected in standard dynamo theory.
7. Discussion and Conclusions
We have done two quite separate things in this paper, of which the second in
Section 5 is perhaps the most original. In that section we give the solution for of an evolving linear force-free magnetic field when the velocity field is quite general. One finds (see Equation (
41)) that the field develops an electric field parallel to the magnetic field but that it is delayed in time. That is, the electric field induced by the initial velocity and magnetic fields is parallel to the current magnetic field after a time
t. The velocity field may be either sub scale and turbulent, or it may be the mean flow.
In a sub section of this part we use the two scale force-free dynamo to estimate the sub scale
effect. This follows from the general solution for the dynamo evolution of the linear field. The time dependence of the
effect declines essentially as
, which resembles a scale invariant result for the classic dynamo ([
6]).
Unfortunately, even evolving from an initial force-free magnetic field the field does not remain force-free. Dynamo evolved force-free fields are thus transitory and perhaps cyclic, assuming dissipative relaxation to the minimum energy state. The lifetime of the force-free phase can nevertheless be quite long. This evolving/ dissipating cyclic behaviour holds both for the linear and for the non linear force-free dynamo evolution. It is a type of ‘quenching’ the dynamo, but in an oscillatory manner.
In summary, the solution (
41) can serve as an approximation to the solution of Equation (
38) for spatially varying
q that is sufficiently slow.
Figure 1 and
Figure 3 show in the relevant panels that
q can in fact be slowly varying over large spatial regions.
In an earlier extensive
Section 2 we have studied the axially symmetric non-linear force-free magnetic field by itself, because of possible solar corona applications [
22,
36] or galactic halo applications (e.g., [
5]). The solutions in arbitrary geometry are notoriously difficult to find, but Equation (
5) gives a simple formulation for the axially symmetric force-free field. Examples are given in
Section 3.2, although there are parameters left unexplored and only one mode in a series is considered. Boundary conditions are required in any specific application. Interesting dome structure is shown in
Figure 3 that resembles some structures over galactic nuclei (e.g., NGC3079, [
25]), or over solar active regions.
In this context a new formulation is the scale invariant form of the non-linear force-free field Equation (
14) studied in
Section 2.2 and
Section 3.1. This symmetry in addition to the axial symmetry reduces the problem to an ordinary differential equation. Special choices of the similarity class
a should reflect the Dimensions of global constants of the problem ([
6]). When
is taken as an example, it implies a global constant with the Dimensions of macroscopic velocity, possibly rotational or inflow/outflow.
The choice
implies a global constant with the Dimensions of magnetic flux (because the field has been scaled to have the Dimensions of velocity). This example (because there is an inverse square radial dependence in the field) keeps the magnetic energy finite even in an infinite volume. The parameters chosen to illustrate this example are somewhat arbitrary, but they present ‘dome-like’ behaviour with an axial ‘jet’ just as do the non scale invariant solutions (e.g.,
Figure 2). The ‘X type’ magnetic field structure can be seen in the scale invariant case with
(1).
In
Section 2.3 we recognized that the earlier work of Low and Lou ([
22]) was in fact a scale invariant set of the axially symmetric soutions. In that section we give a detailed comparison between that work and our own. We show that the formal scale invariant theory only extends slightly their results to include the
(
) solution. The concept of the similarity class
a is also new.
Force-free magnetic fields have a scale built in as
. We have used this idea in
Section 5 to consider the
effect, as was remarked above. In this context we have also summarized the evolution of magnetic helicity for the classical dynamo field. We demonstrated that two coupled force-free levels conserve helicity as an exchange between them. The conserved force-free magnetic helicity is proportional to the magnetic energy density.
Steady initial force-free magnetic fields are inconsistent with classical dynamo evolution. Steady force-free fields (linear and non linear) can exist passively in a macroscopic hydrodynamical flow in which other forces dominate. In our simple example the velocity is parallel to the force-free magnetic field and comprises an incompressible Beltrami flow. This ‘hydrodynamic dynamo’ is thus a result of forces (e.g., gravity and pressure) driving the dynamics and which dominate any Ampèrian force as the field is established.
There is another limit in MHD flow when the field is so strong that it dominates other forces and acts as a conduit for the flow. It is force-free now in the sense that a small Ampèrian force serves to dominate other forces.This appears to happen above sun spots and may happen in parts of spiral galaxies. Nuclear outflows or ‘champagne flows’ may be involved.
In an
appendix we give a formulation for the familiar linear force-free magnetic field, which is notationally coherent with our non linear examples. We show an example in
Figure A1 for a single mode. The dome-like structure and spiralling field structure on cones is common to many solutions. By contrast projected ‘X-type’ fields do not occur.

{kind=link}
{kind=link}
{kind=link}
{kind=link}



