Dynamical Task Switching in Cellular Computers


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Background
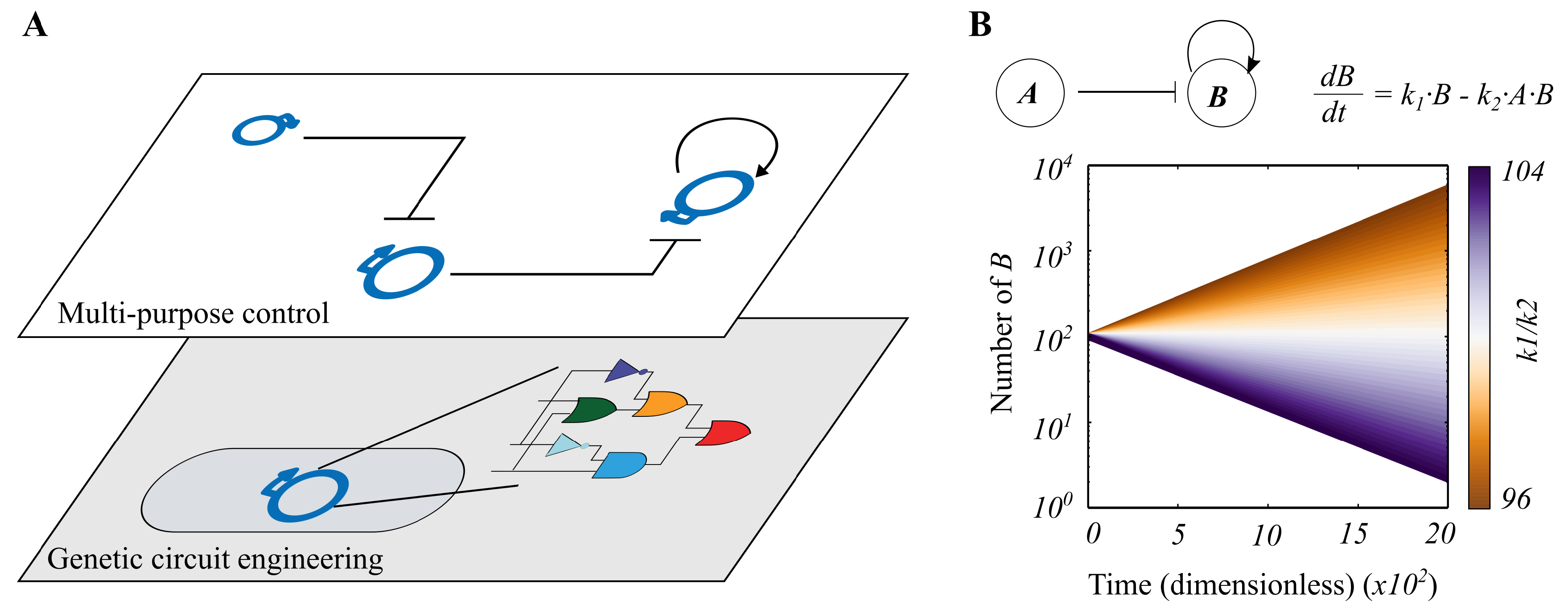
Our Task Switching Model
3. Results
3.1. Continuous Modelling
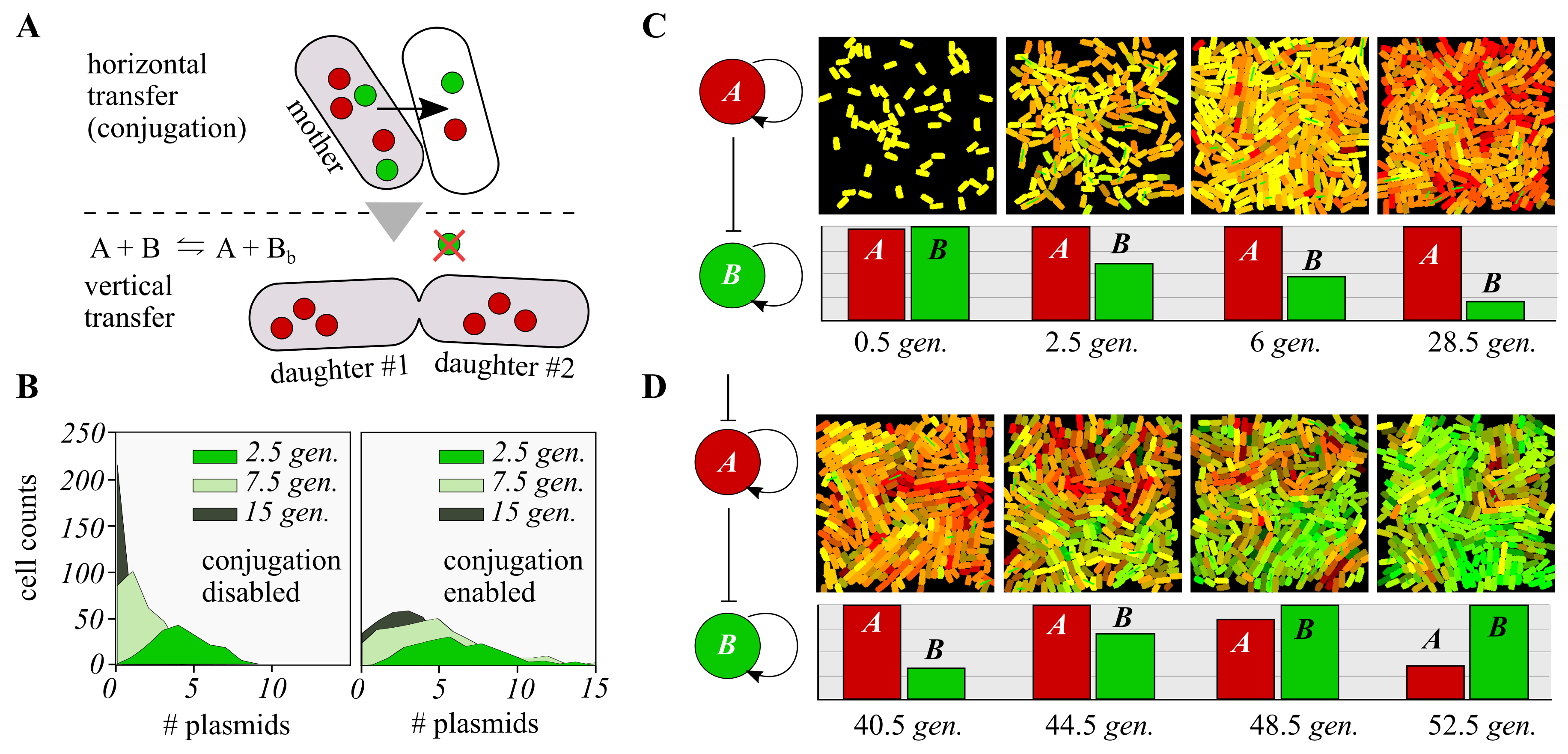
3.2. Discrete Simulation
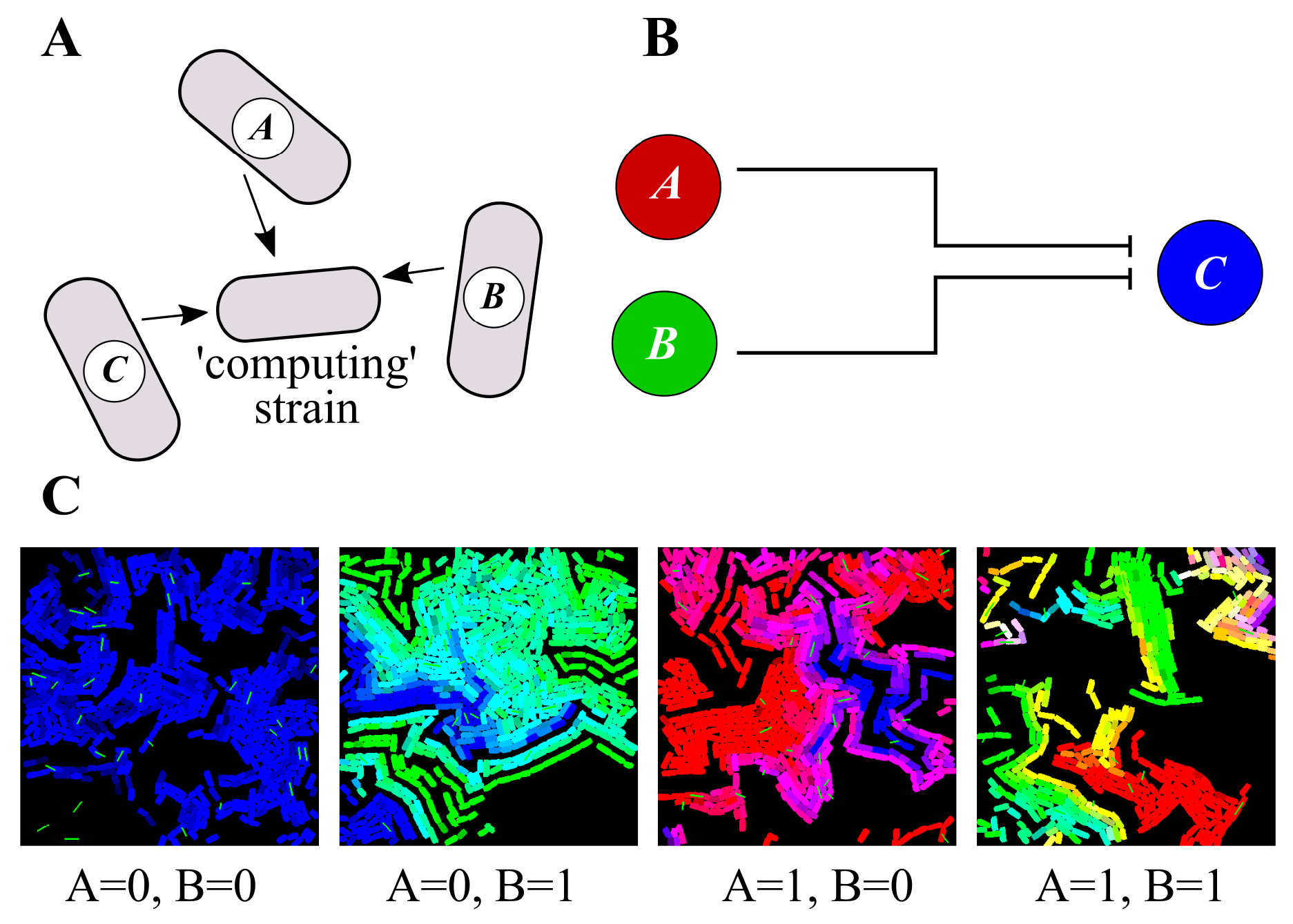
3.3. Distributed Computations Using Cell Consortia
3.4. Use-Casing the Potential of Task Switching
4. Materials and Methods
4.1. Differential models
4.2. Stochastic Models
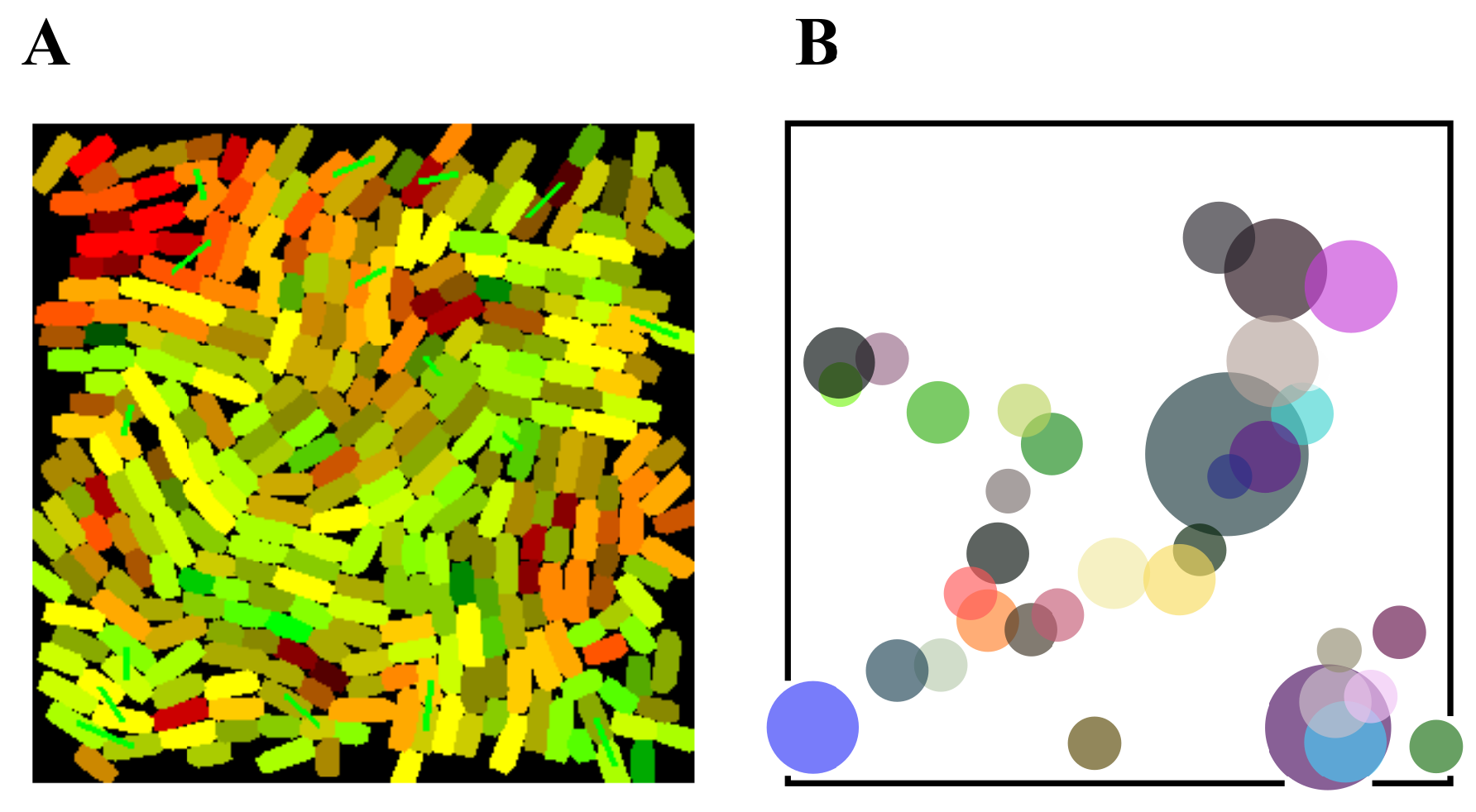
4.3. Agent-Based Spatial Simulations
5. Discussion and Conclusions
Supplementary Materials
Author Contributions
Funding
Conflicts of Interest
References
- Amos, M.; Goni-Moreno, A. Cellular computing and synthetic biology. In Computational Matter; Stepney, S., Rasmussen, S., Amos, M., Eds.; Springer: Berlin, Germany, 2018; pp. 93–110. [Google Scholar]
- Church, G.M.; Elowitz, M.B.; Smolke, C.D.; Voigt, C.A.; Weiss, R. Realizing the potential of synthetic biology. Nat. Rev. Mol. Cell Biol. 2014, 15, 289–294. [Google Scholar] [CrossRef] [PubMed]
- Ro, D.K.; Paradise, E.M.; Ouellet, M.; Fisher, K.J.; Newman, K.L.; Ndungu, J.M.; Ho, K.A.; Eachus, R.A.; Ham, T.S.; Kirby, J.; et al. Production of the antimalarial drug precursor artemisinic acid in engineered yeast. Nature 2006, 440, 940–943. [Google Scholar] [CrossRef] [PubMed]
- Kim, H.J.; Jeong, H.; Lee, S.J. Synthetic biology for microbial heavy metal biosensors. Anal. Bioanal. Chem. 2018, 410, 1–13. [Google Scholar] [CrossRef] [PubMed]
- Selvester, R.H.; Collier, C.R.; Pearson, R.B. Analog computer model of the vectorcardiogram. Circulation 1965, 31, 45–53. [Google Scholar] [CrossRef]
- Heinmets, F. Analog computer analysis of a model-system for the induced enzyme synthesis. J. Theor. Biol. 1964, 6, 60–75. [Google Scholar] [CrossRef]
- Nielsen, A.A.; Der, B.S.; Shin, J.; Vaidyanathan, P.; Paralanov, V.; Strychalski, E.A.; Ross, D.; Densmore, D.; Voigt, C.A. Genetic circuit design automation. Science 2016, 352, aac7341. [Google Scholar] [CrossRef] [PubMed]
- Wintle, B.C.; Boehm, C.R.; Rhodes, C.; Molloy, J.C.; Millett, P.; Adam, L.; Breitling, R.; Carlson, R.; Casagrande, R.; Dando, M.; et al. Point of View: A transatlantic perspective on 20 emerging issues in biological engineering. Elife 2017, 6, e30247. [Google Scholar] [CrossRef]
- Amos, M. Cellular Computing; Oxford University Press: Oxford, UK, 2004. [Google Scholar]
- Manzoni, R.; Urrios, A.; Velazquez-Garcia, S.; de Nadal, E.; Posas, F. Synthetic biology: insights into biological computation. Integr. Biol. 2016, 8, 518–532. [Google Scholar] [CrossRef]
- Benenson, Y. Biomolecular computing systems: principles, progress and potential. Nat. Rev. Genet. 2012, 13, 455–468. [Google Scholar] [CrossRef]
- Bonnet, J.; Yin, P.; Ortiz, M.E.; Subsoontorn, P.; Endy, D. Amplifying genetic logic gates. Science 2013, 340, 599–603. [Google Scholar] [CrossRef]
- Lou, C.; Liu, X.; Ni, M.; Huang, Y.; Huang, Q.; Huang, L.; Jiang, L.; Lu, D.; Wang, M.; Liu, C.; et al. Synthesizing a novel genetic sequential logic circuit: A push-on push-off switch. Mol. Syst. Biol. 2010, 6, 350. [Google Scholar] [CrossRef] [PubMed]
- Purcell, O.; Savery, N.J.; Grierson, C.S.; di Bernardo, M. A comparative analysis of synthetic genetic oscillators. J. R. Soc. Interface 2010, 7, 1503–1524. [Google Scholar] [CrossRef] [PubMed]
- Friedland, A.E.; Lu, T.K.; Wang, X.; Shi, D.; Church, G.; Collins, J.J. Synthetic gene networks that count. Science 2009, 324, 1199–1202. [Google Scholar] [CrossRef] [PubMed]
- Funnell, B.E.; Phillips, G.J. Plasmid Biology; ASM Press: Sterling, VA, USA, 2004. [Google Scholar]
- Smillie, C.; Garcillán-Barcia, M.P.; Francia, M.V.; Rocha, E.P.; de la Cruz, F. Mobility of plasmids. Microbiol. Mol. Biol. Rev. 2010, 74, 434–452. [Google Scholar] [CrossRef] [PubMed]
- Martínez-García, E.; Aparicio, T.; Goñi-Moreno, A.; Fraile, S.; de Lorenzo, V. SEVA 2.0: An update of the Standard European Vector Architecture for de-/re-construction of bacterial functionalities. Nucleic Acids Res. 2014, 43, D1183–D1189. [Google Scholar] [CrossRef]
- Llosa, M.; Gomis-Rüth, F.X.; Coll, M.; Cruz, F.d.L. Bacterial conjugation: a two-step mechanism for DNA transport. Mol. Microbiol. 2002, 45, 1–8. [Google Scholar] [CrossRef]
- Tatum, E.; Lederberg, J. Gene recombination in the bacterium Escherichia coli. J. Bacteriol. 1947, 53, 673. [Google Scholar]
- Goñi-Moreno, A.; Amos, M.; de la Cruz, F. Multicellular computing using conjugation for wiring. PLoS ONE 2013, 8, e65986. [Google Scholar] [CrossRef]
- Goñi-Moreno, A.; Amos, M. A reconfigurable NAND/NOR genetic logic gate. BMC Syst. Biol. 2012, 6, 126. [Google Scholar] [CrossRef]
- Gil, D.; Bouché, J.P. ColE1-type vectors with fully repressible replication. Gene 1991, 105, 17–22. [Google Scholar] [CrossRef]
- Friehs, K. Plasmid copy number and plasmid stability. In New Trends and Developments in Biochemical Engineering; Scheper, T., Ed.; Springer: Berlin/Heidelberg, Germany, 2004; pp. 47–82. [Google Scholar]
- Núñez, B.; Avila, P.; De La Cruz, F. Genes involved in conjugative DNA processing of plasmid R6K. Mol. Microbiol. 1997, 24, 1157–1168. [Google Scholar] [CrossRef] [PubMed]
- Goni-Moreno, A.; Amos, M. DiSCUS: A simulation platform for conjugation computing. In International Conference on Unconventional Computation and Natural Computation; Springer: Cham, Switzerland, 2015; pp. 181–191. [Google Scholar]
- García-Betancur, J.C.; Goñi-Moreno, A.; Horger, T.; Schott, M.; Sharan, M.; Eikmeier, J.; Wohlmuth, B.; Zernecke, A.; Ohlsen, K.; Kuttler, C.; et al. Cell differentiation defines acute and chronic infection cell types in Staphylococcus aureus. Elife 2017, 6, e28023. [Google Scholar] [CrossRef] [PubMed]
- Nikel, P.I.; Romero-Campero, F.J.; Zeidman, J.A.; Goñi-Moreno, Á.; de Lorenzo, V. The glycerol-dependent metabolic persistence of Pseudomonas putida KT2440 reflects the regulatory logic of the GlpR repressor. MBio 2015, 6, e00340-15. [Google Scholar] [CrossRef] [PubMed]
- Goñi-Moreno, A.; Redondo-Nieto, M.; Arroyo, F.; Castellanos, J. Biocircuit design through engineering bacterial logic gates. Nat. Comput. 2011, 10, 119–127. [Google Scholar] [CrossRef]
- Regot, S.; Macia, J.; Conde, N.; Furukawa, K.; Kjellén, J.; Peeters, T.; Hohmann, S.; de Nadal, E.; Posas, F.; Solé, R. Distributed biological computation with multicellular engineered networks. Nature 2011, 469, 207. [Google Scholar] [CrossRef] [PubMed]
- Macía, J.; Posas, F.; Solé, R.V. Distributed computation: the new wave of synthetic biology devices. Trends Biotechnol. 2012, 30, 342–349. [Google Scholar] [CrossRef] [PubMed]
- Getino, M.; Palencia-Gándara, C.; Garcillán-Barcia, M.P.; de la Cruz, F. PifC and Osa, Plasmid Weapons against Rival Conjugative Coupling Proteins. Front. Microbiol. 2017, 8, 2260. [Google Scholar] [CrossRef]
- Miró-Bueno, J.M.; Rodríguez-Patón, A. A simple negative interaction in the positive transcriptional feedback of a single gene is sufficient to produce reliable oscillations. PloS ONE 2011, 6, e27414. [Google Scholar] [CrossRef]
- Goni-Moreno, A.; Amos, M. Model for a population-based microbial oscillator. BioSystems 2011, 105, 286–294. [Google Scholar] [CrossRef]
- Gillespie, D.T. Exact stochastic simulation of coupled chemical reactions. J. Phys. Chem. 1977, 81, 2340–2361. [Google Scholar] [CrossRef]
- Espeso, D.R.; Martínez-García, E.; de Lorenzo, V.; Goñi-Moreno, Á. Physical forces shape group identity of swimming Pseudomonas putida cells. Front. Microbiol. 2016, 7, 1437. [Google Scholar] [CrossRef] [PubMed]
- Goñi-Moreno, A.; Carcajona, M.; Kim, J.; Martínez-García, E.; Amos, M.; de Lorenzo, V. An implementation-focused bio/algorithmic workflow for synthetic biology. ACS Synth. Biol. 2016, 5, 1127–1135. [Google Scholar] [CrossRef] [PubMed]
- Gama, J.A.; Zilhão, R.; Dionisio, F. Co-resident plasmids travel together. Plasmid 2017, 93, 24–29. [Google Scholar] [CrossRef] [PubMed]
- Gama, J.A.; Zilhão, R.; Dionisio, F. Multiple plasmid interference–Pledging allegiance to my enemy’s enemy. Plasmid 2017, 93, 17–23. [Google Scholar] [CrossRef] [PubMed]
- Del Campo, I.; Ruiz, R.; Cuevas, A.; Revilla, C.; Vielva, L.; de la Cruz, F. Determination of conjugation rates on solid surfaces. Plasmid 2012, 67, 174–182. [Google Scholar] [CrossRef] [PubMed]
- Seoane, J.; Yankelevich, T.; Dechesne, A.; Merkey, B.; Sternberg, C.; Smets, B.F. An individual-based approach to explain plasmid invasion in bacterial populations. FEMS Microbiol. Ecol. 2011, 75, 17–27. [Google Scholar] [CrossRef] [PubMed]
- Goñi-Moreno, A.; Benedetti, I.; Kim, J.; de Lorenzo, V. Deconvolution of gene expression noise into spatial dynamics of transcription factor–promoter interplay. ACS Synth. Biol. 2017, 6, 1359–1369. [Google Scholar] [CrossRef]
- Zatyka, M.; Thomas, C.M. Control of genes for conjugative transfer of plasmids and other mobile elements. FEMS Microbiol. Rev. 1998, 21, 291–319. [Google Scholar] [CrossRef]
- Daniel, R.; Rubens, J.R.; Sarpeshkar, R.; Lu, T.K. Synthetic analog computation in living cells. Nature 2013, 497, 619. [Google Scholar] [CrossRef]
- Farzadfard, F.; Lu, T.K. Genomically encoded analog memory with precise in vivo DNA writing in living cell populations. Science 2014, 346, 1256272. [Google Scholar] [CrossRef]
- Tang, W.; Liu, D.R. Rewritable multi-event analog recording in bacterial and mammalian cells. Science 2018, 360, eaap8992. [Google Scholar] [CrossRef] [PubMed]
- Van de Guchte, M. Horizontal gene transfer and ecosystem function dynamics. Trends Microbiol. 2017, 25, 699–700. [Google Scholar] [CrossRef] [PubMed]





© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Goñi-Moreno, A.; de la Cruz, F.; Rodríguez-Patón, A.; Amos, M. Dynamical Task Switching in Cellular Computers. Life 2019, 9, 14. https://doi.org/10.3390/life9010014
Goñi-Moreno A, de la Cruz F, Rodríguez-Patón A, Amos M. Dynamical Task Switching in Cellular Computers. Life. 2019; 9(1):14. https://doi.org/10.3390/life9010014
Chicago/Turabian StyleGoñi-Moreno, Angel, Fernando de la Cruz, Alfonso Rodríguez-Patón, and Martyn Amos. 2019. "Dynamical Task Switching in Cellular Computers" Life 9, no. 1: 14. https://doi.org/10.3390/life9010014
APA StyleGoñi-Moreno, A., de la Cruz, F., Rodríguez-Patón, A., & Amos, M. (2019). Dynamical Task Switching in Cellular Computers. Life, 9(1), 14. https://doi.org/10.3390/life9010014