
VIAM-USV2000: An Unmanned Surface Vessel with Novel Autonomous Capabilities in Confined Riverine Environments



Abstract
:1. Introduction
- Design hardware-related and software-related components for an unmanned surface vessel, namely, USV2000, to realize advanced autonomous capabilities in confined riverine environments.
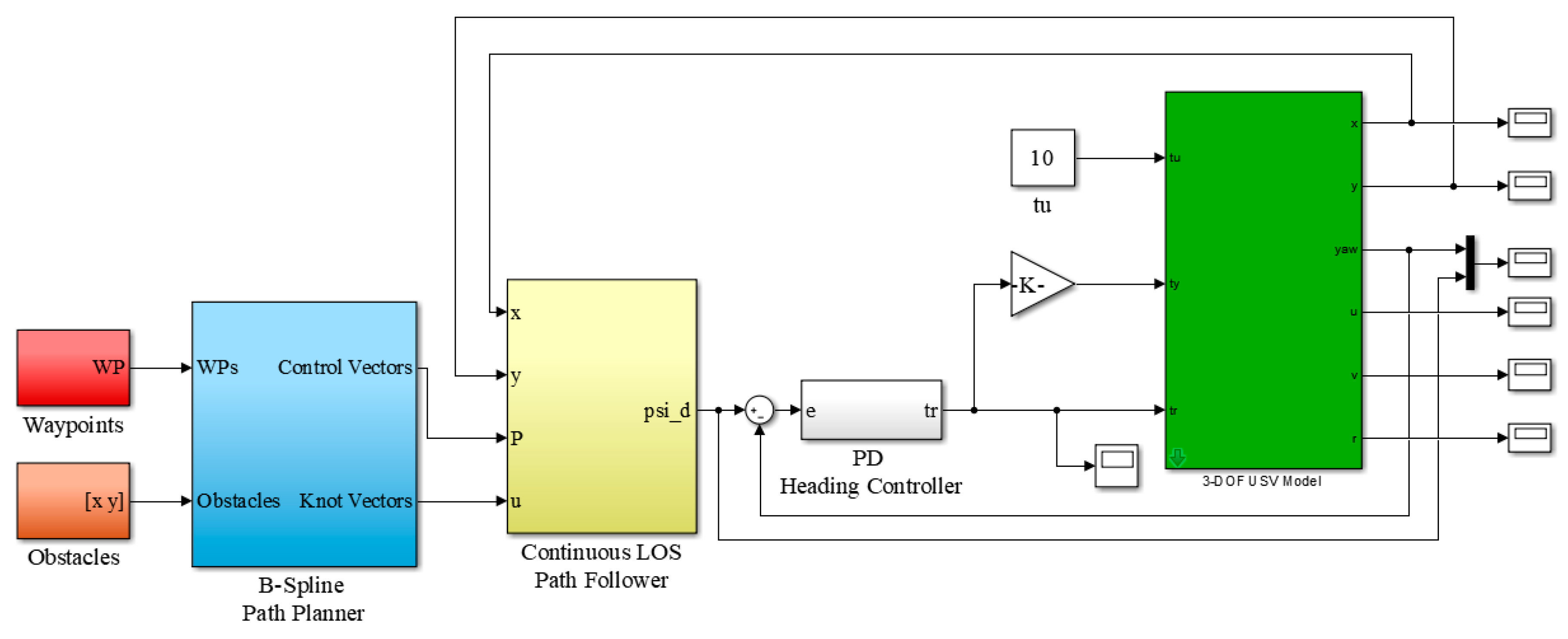
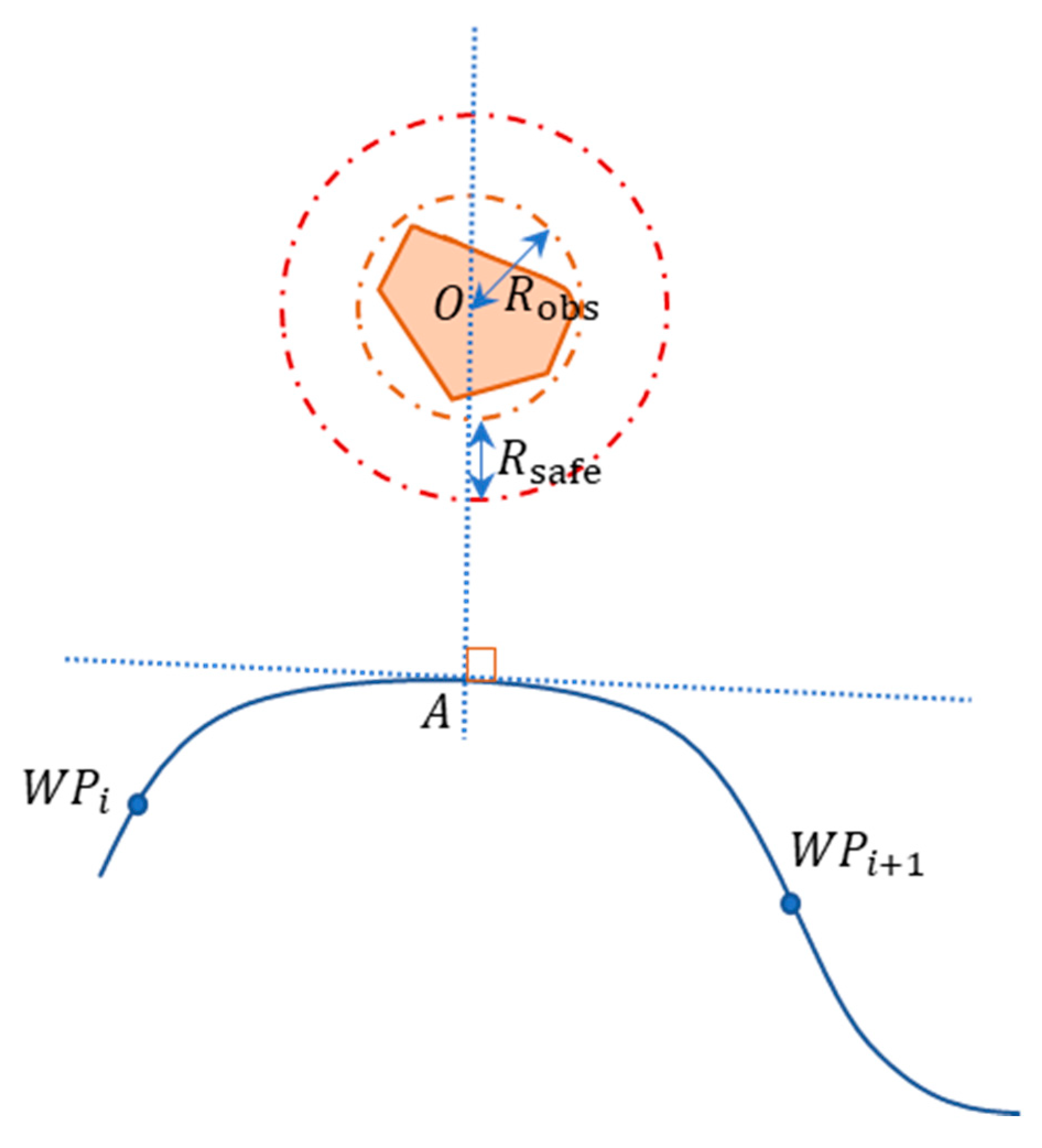
- Enhance the B-Spline path planner so that it can automatically optimize the curve’s shape to meet the limiting curvature and avoid static obstacles.
- Develop a continuous LOS path follower for USV to smoothly follow any arbitrary parameterized curve.
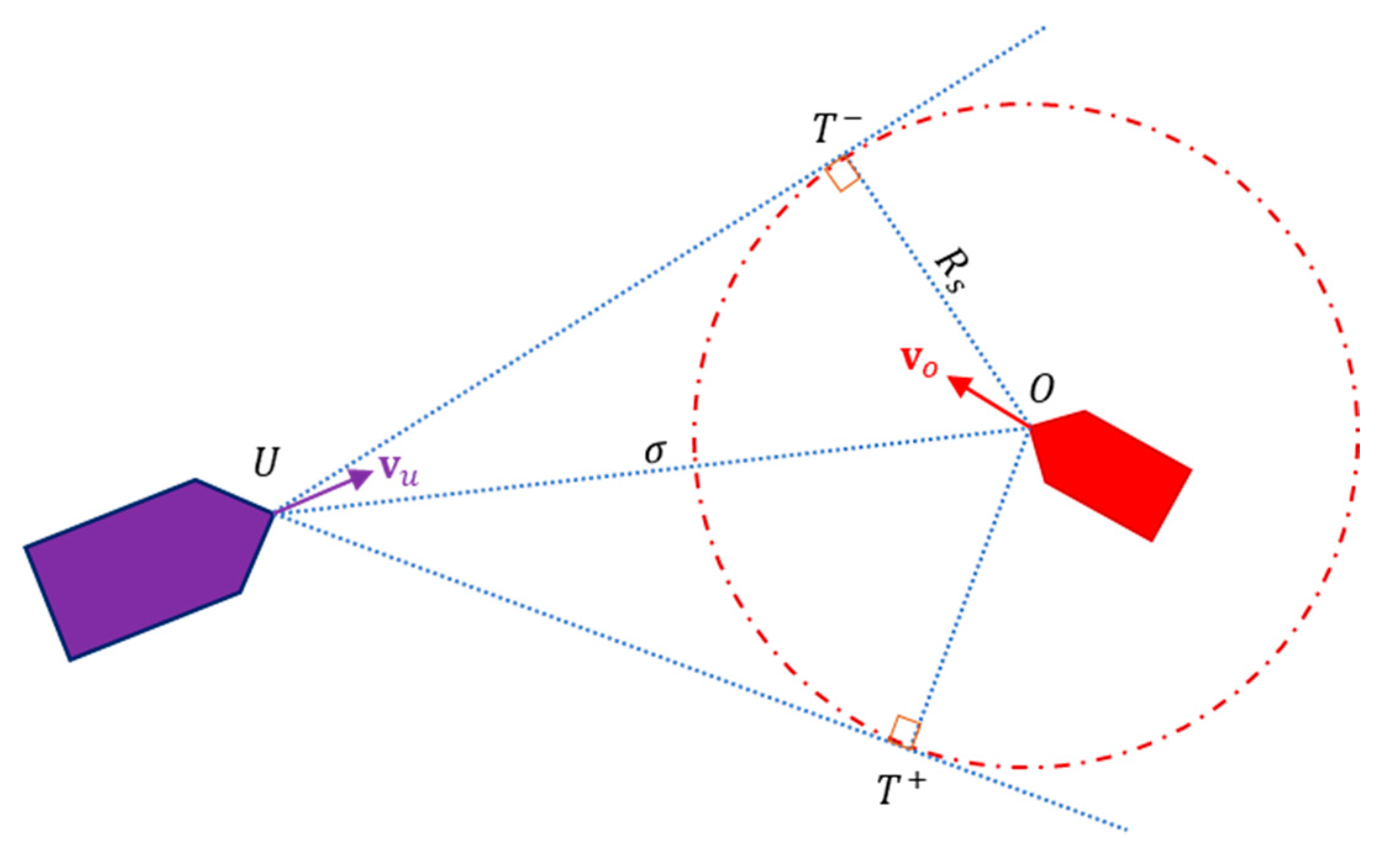
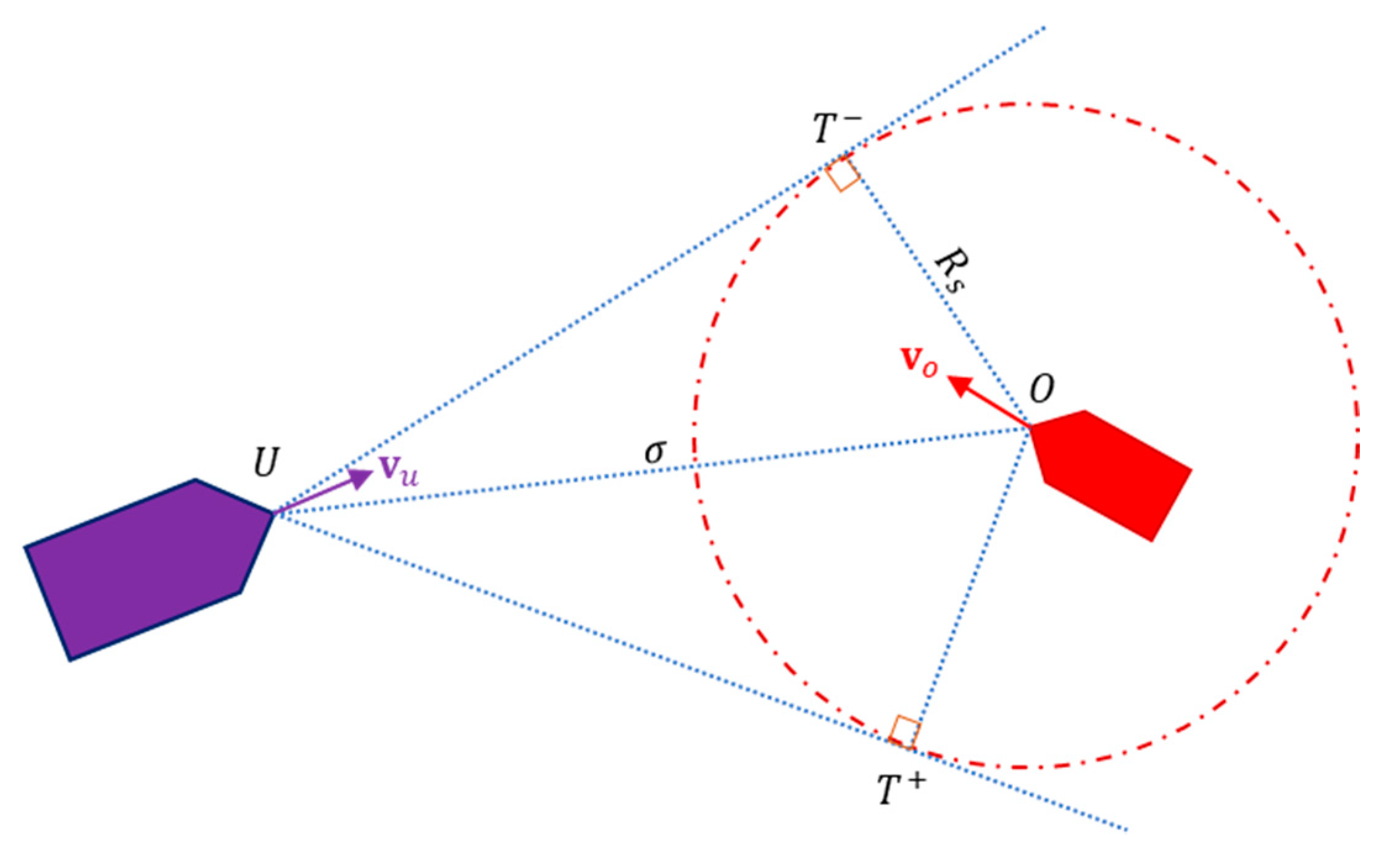
- Develop an advanced SBG law that generates a trapezium-like path for the vessel to avoid dynamic obstacles.
- Provide extensive simulated and experimental results to verify the effectiveness of the proposed algorithms in USV2000.
2. System Development
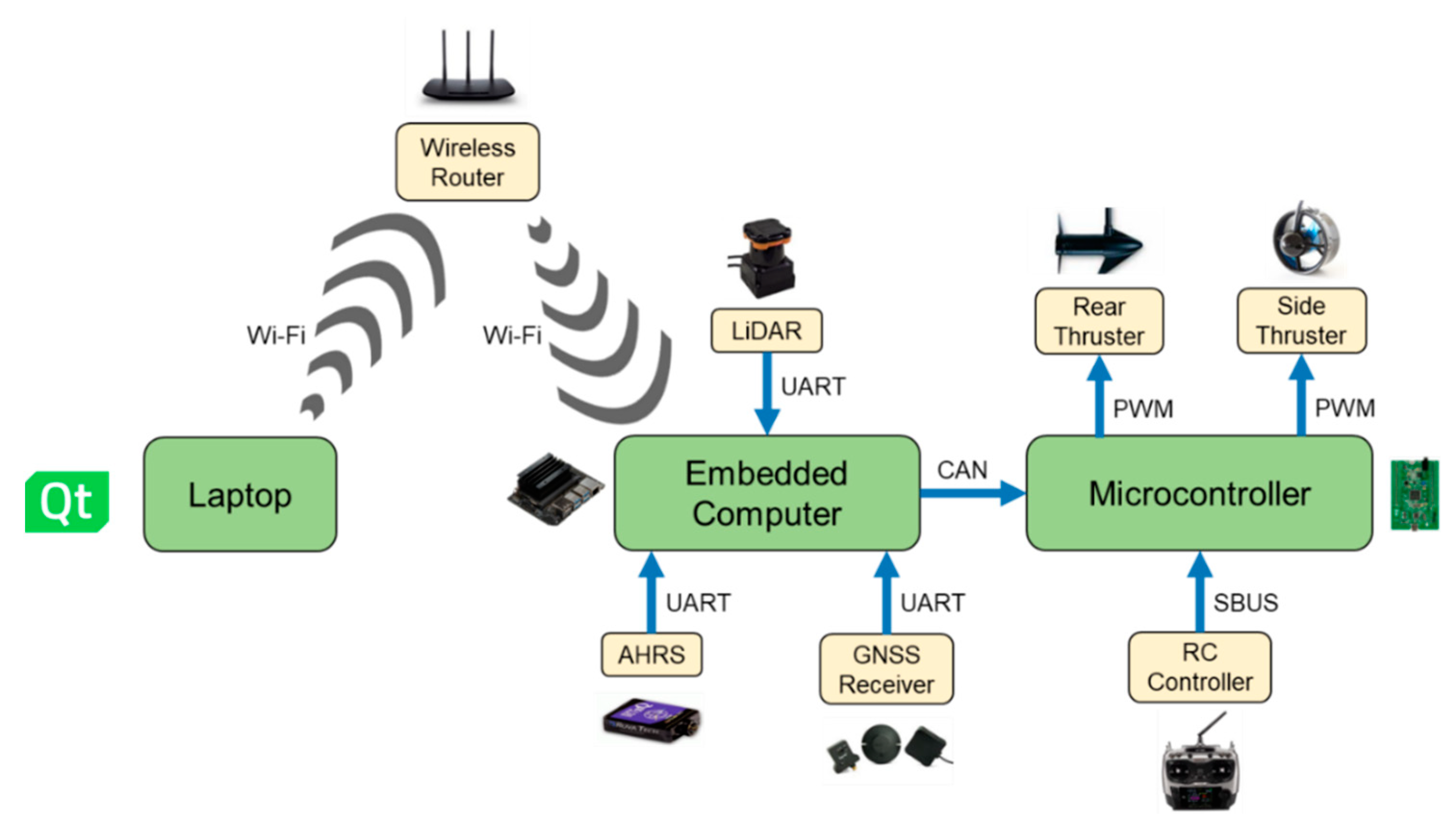
2.1. Hardware Construction
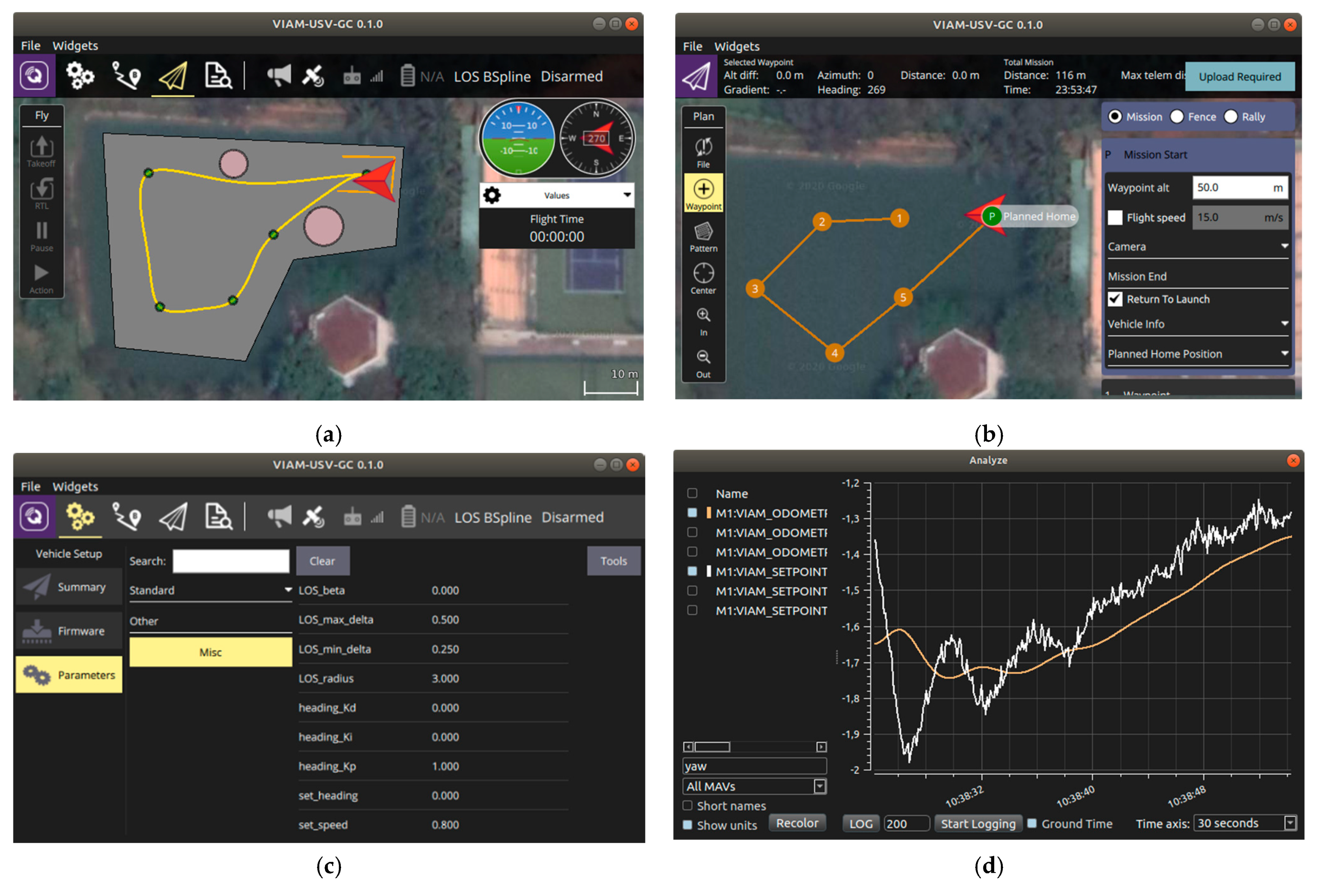
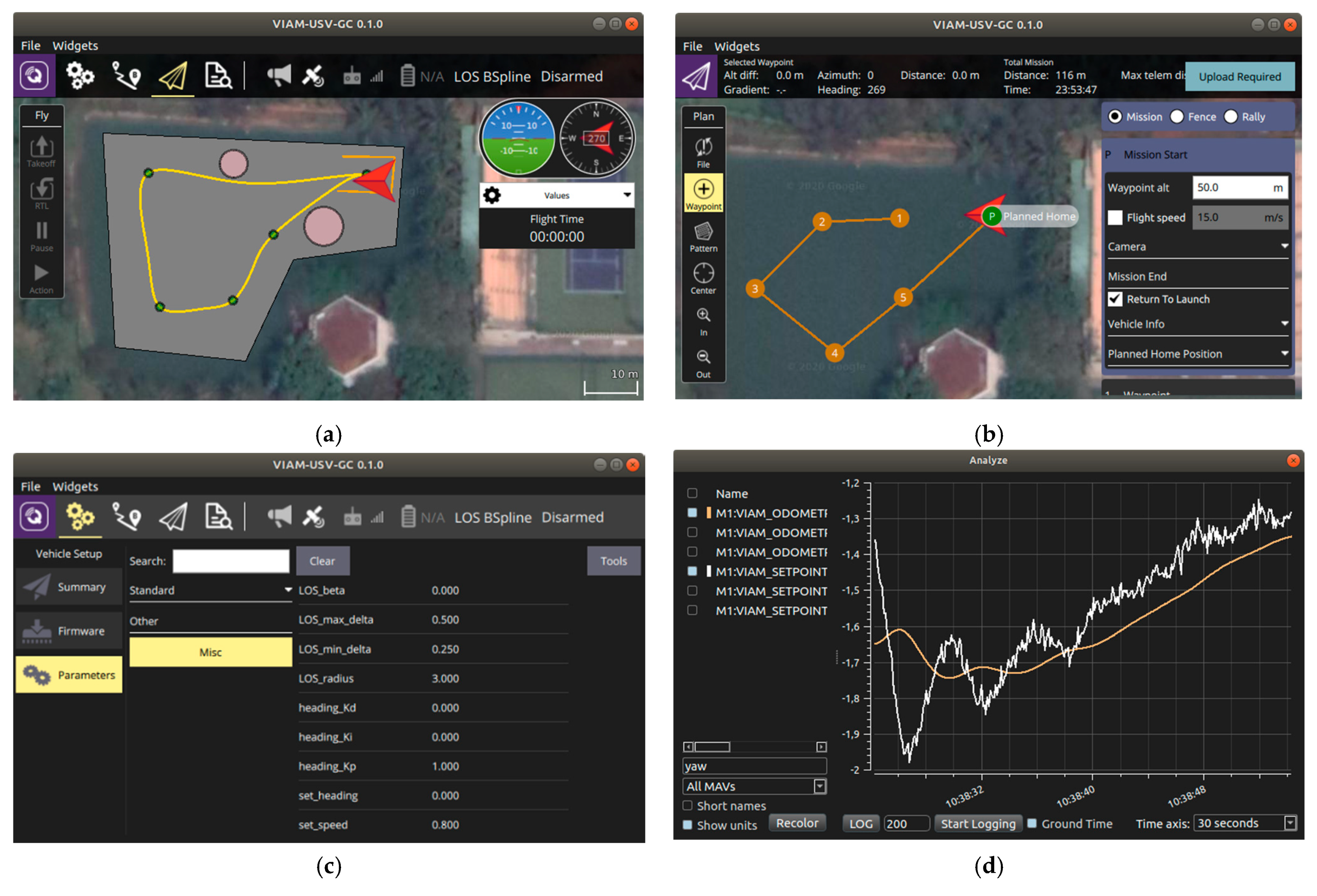
2.2. Software Composition
3. Path Planning
3.1. B-Spline Path Generation
3.2. Genetic Algorithm for Optimal B-Spline Shaping
4. Path Following
5. Obstacle Avoidance
6. Simulated and Experimental Results
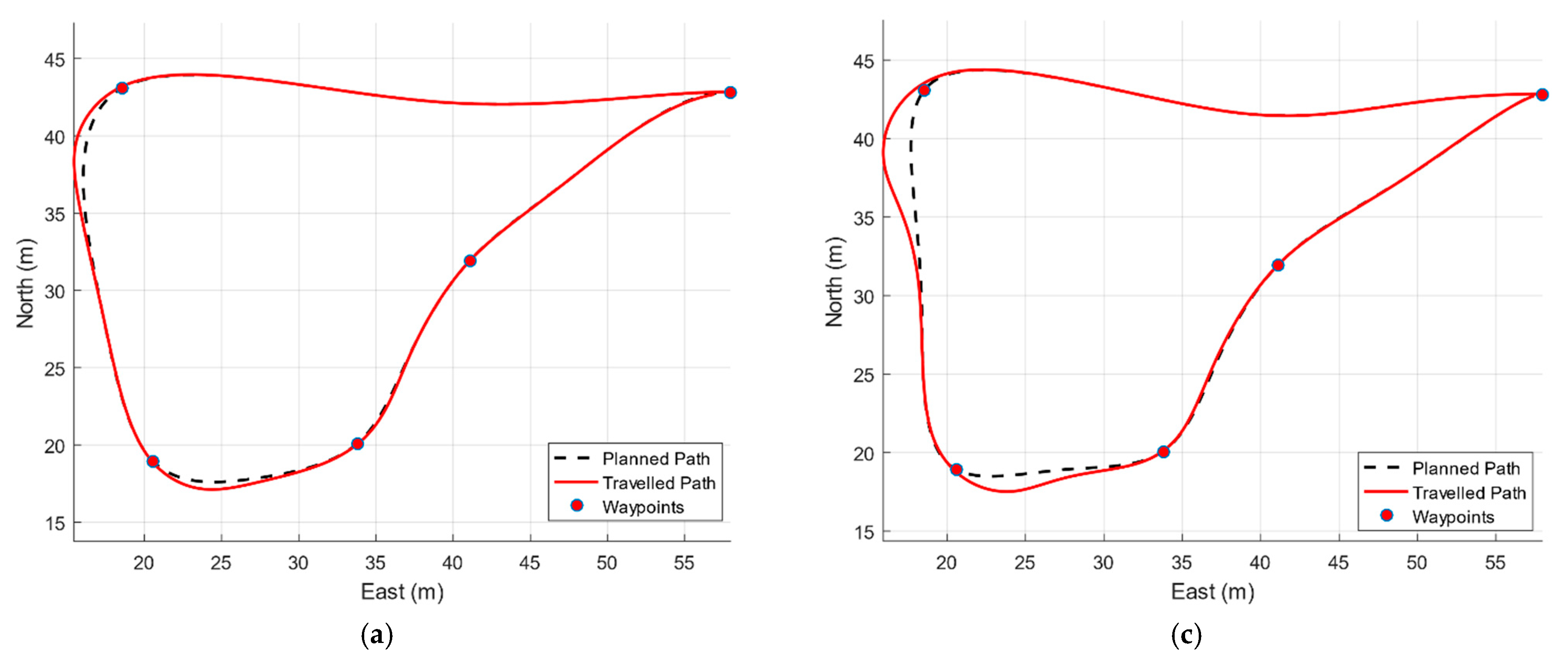
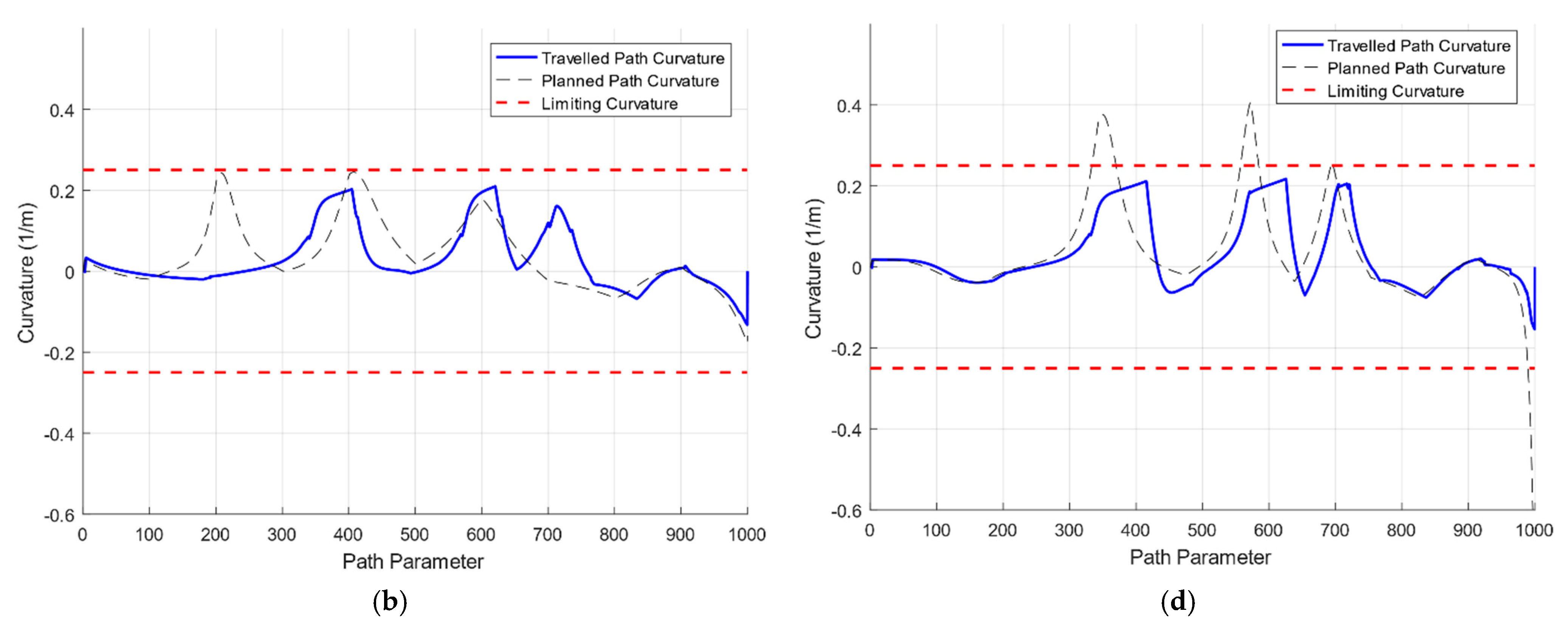
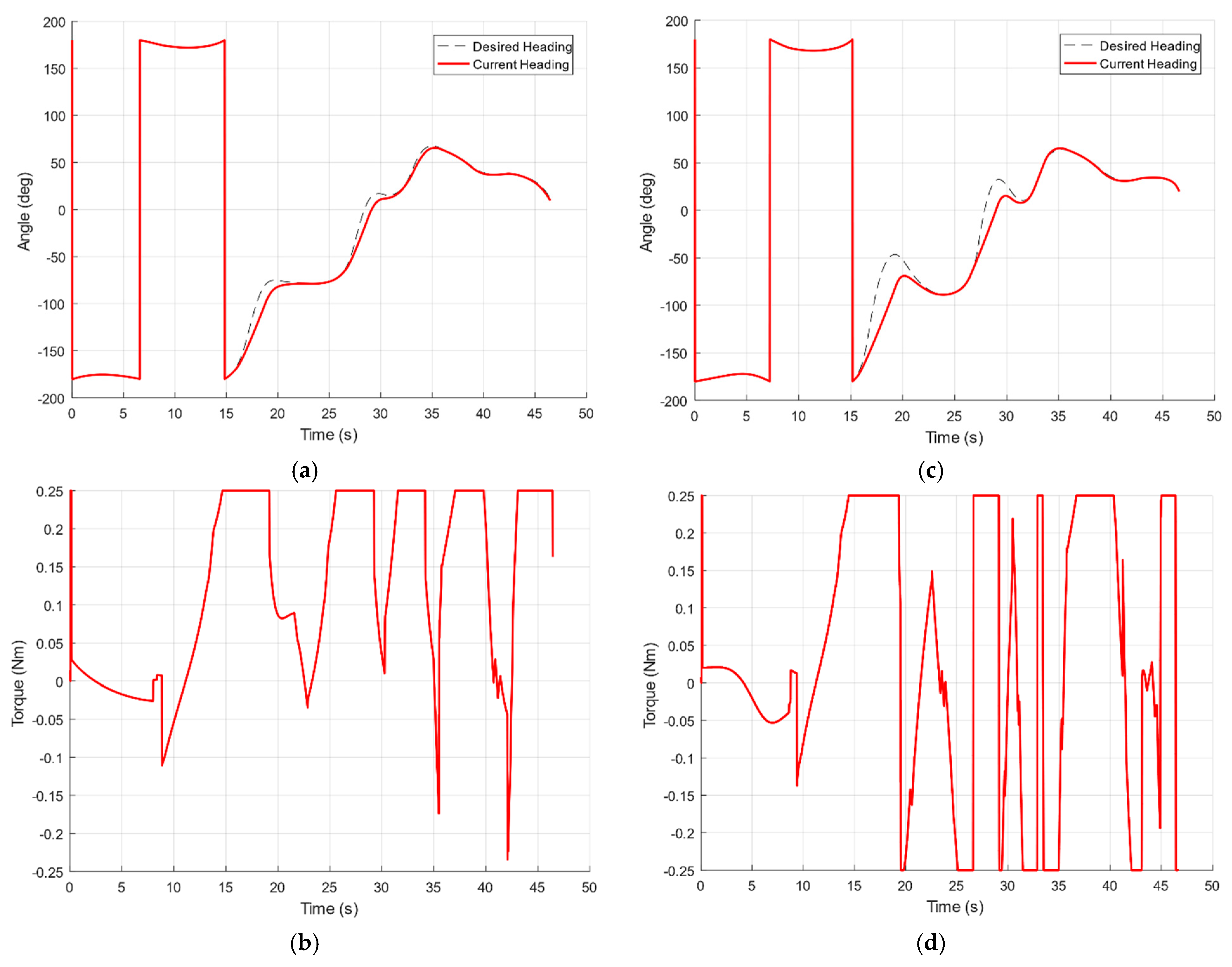
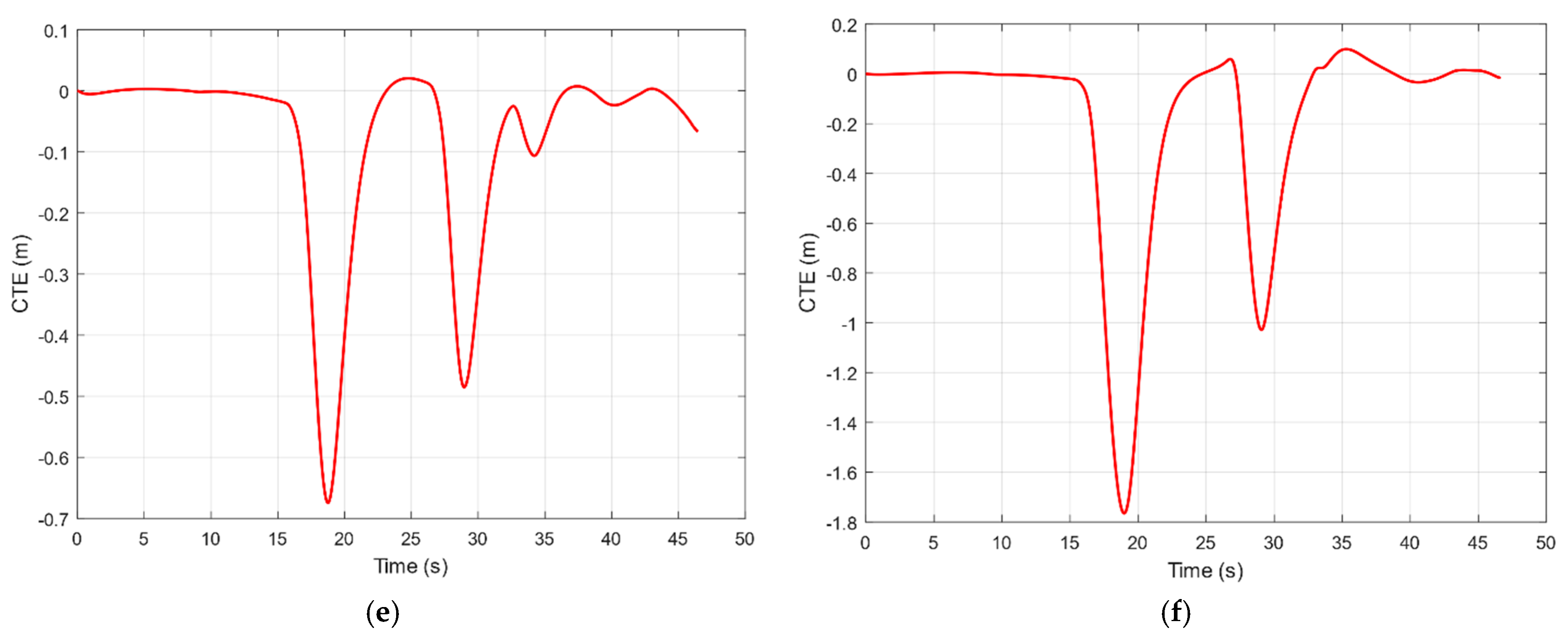
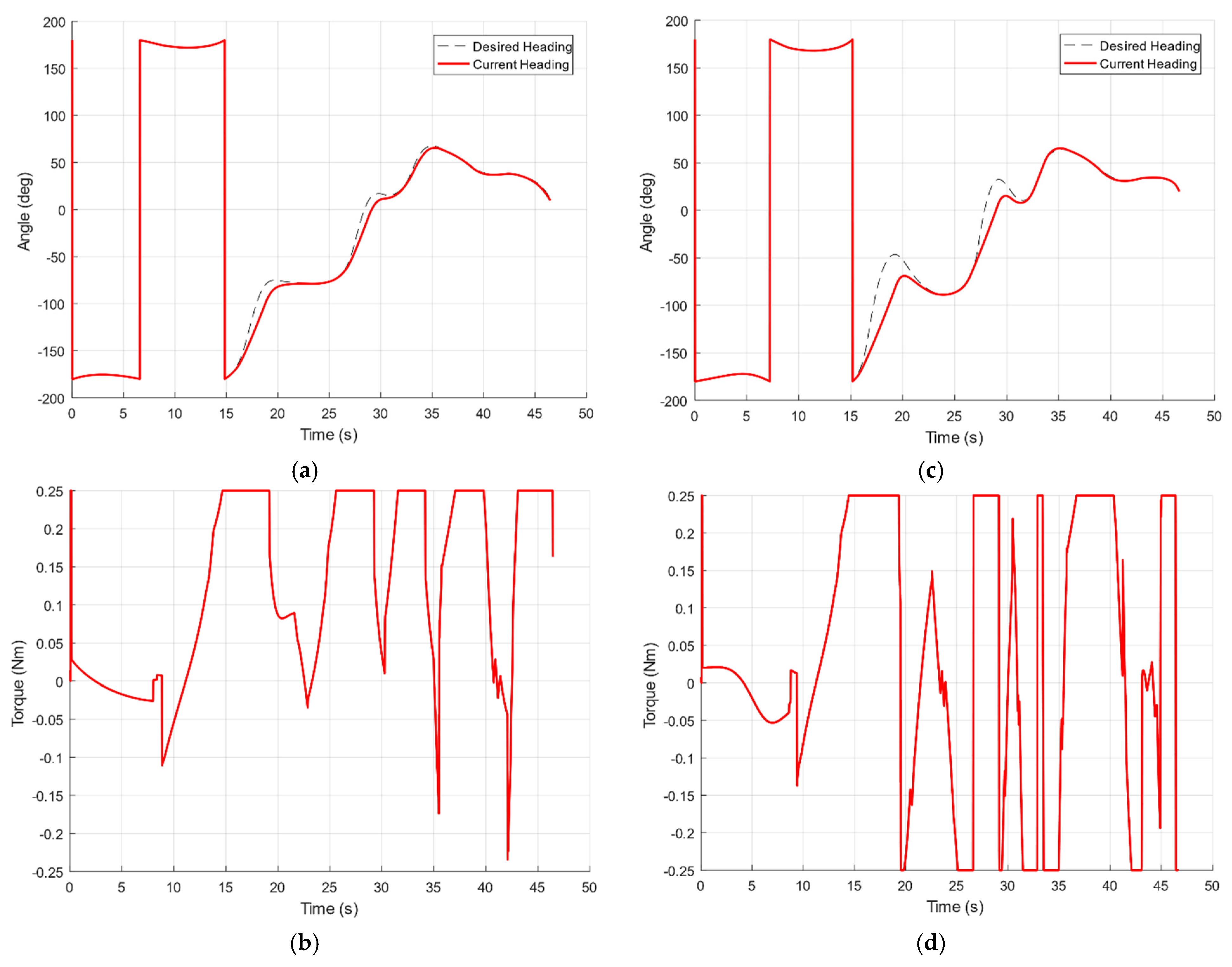
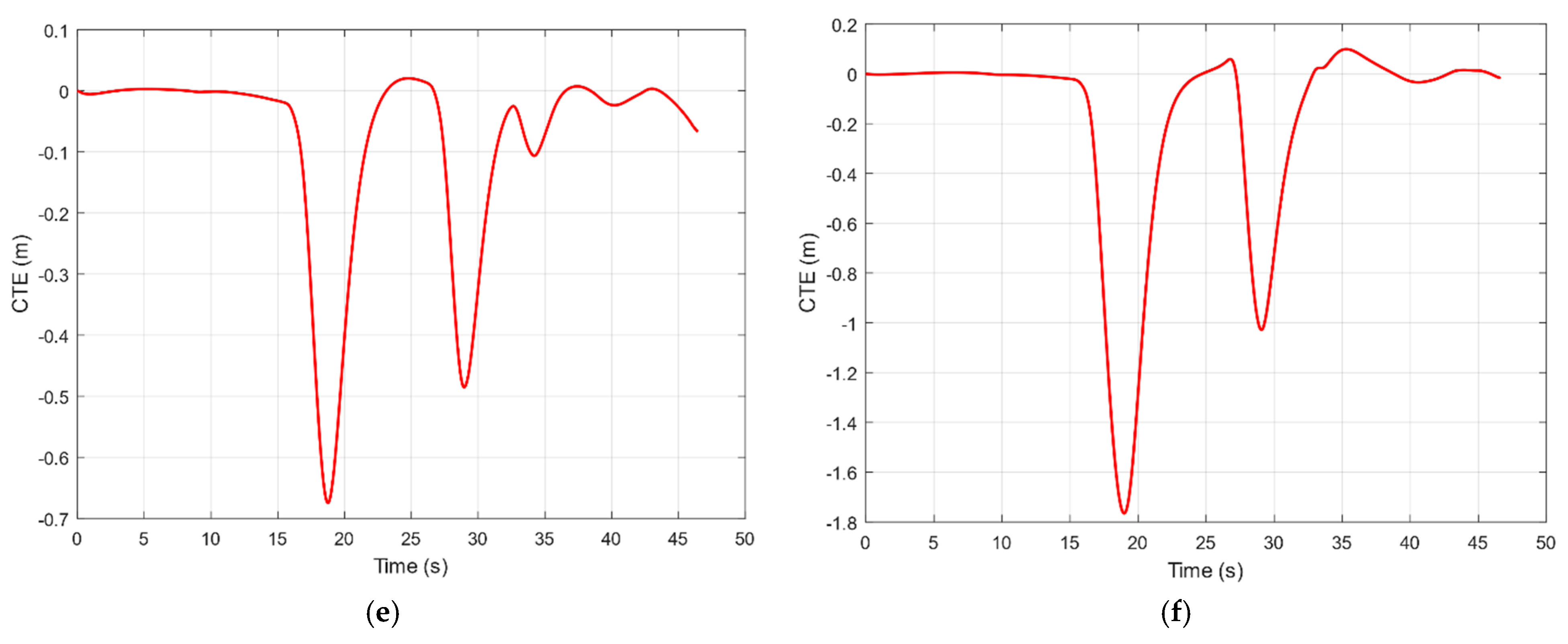
6.1. Simulated Result of B-Spline Path Planner and Continuous LOS Path Follower
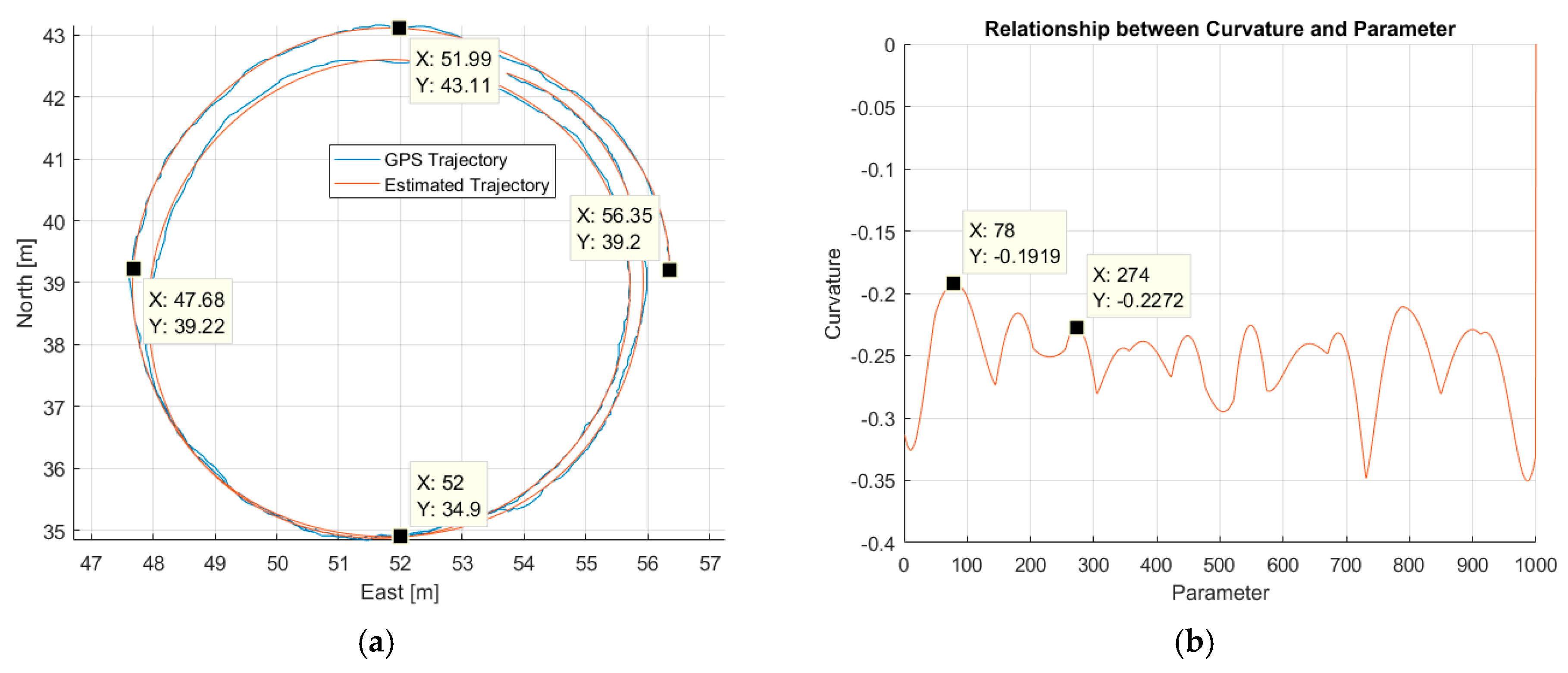
6.2. Maneuvering Test
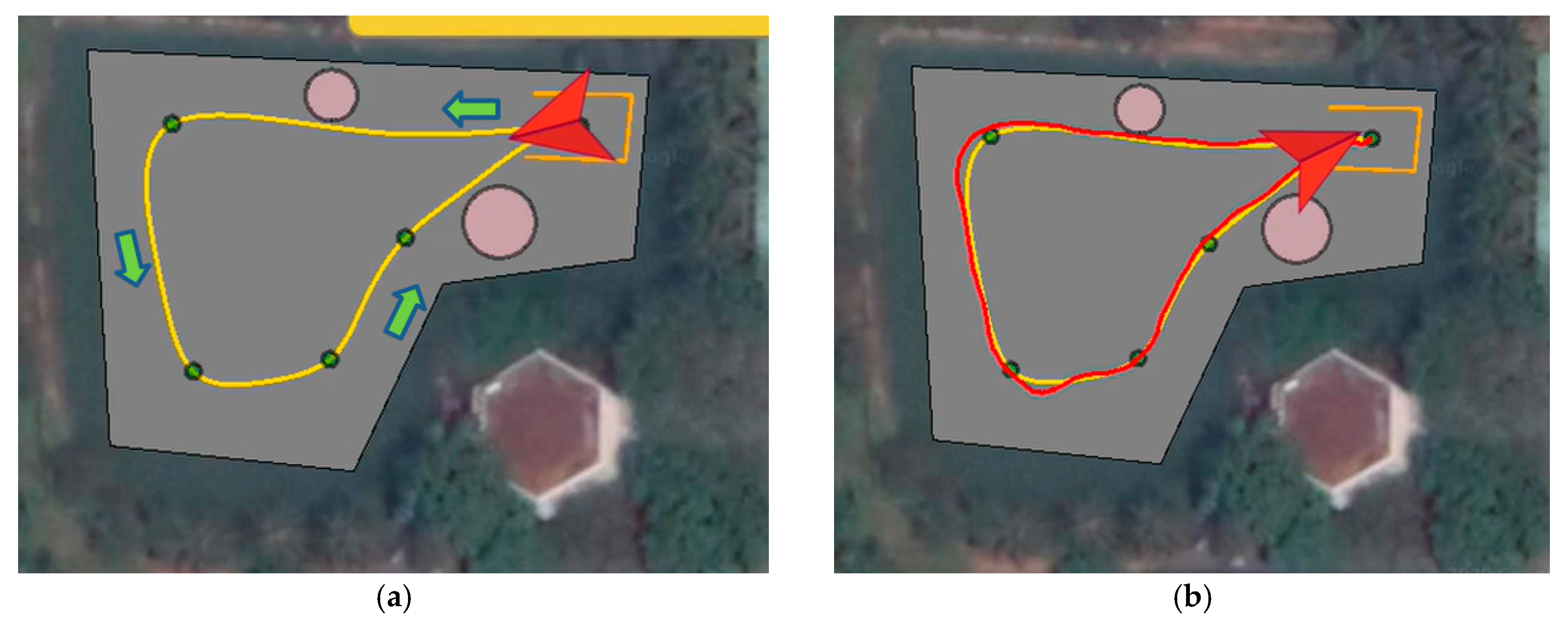
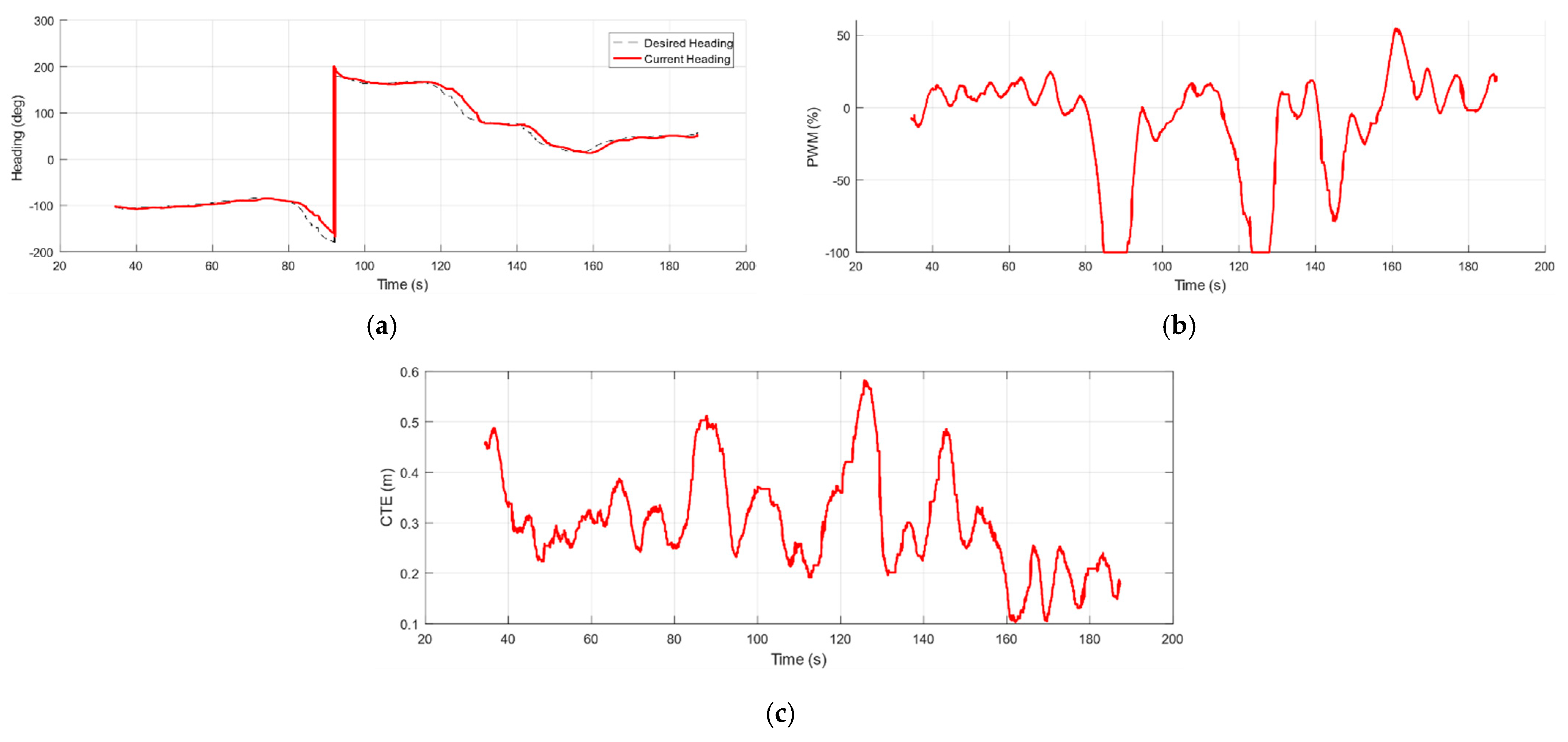
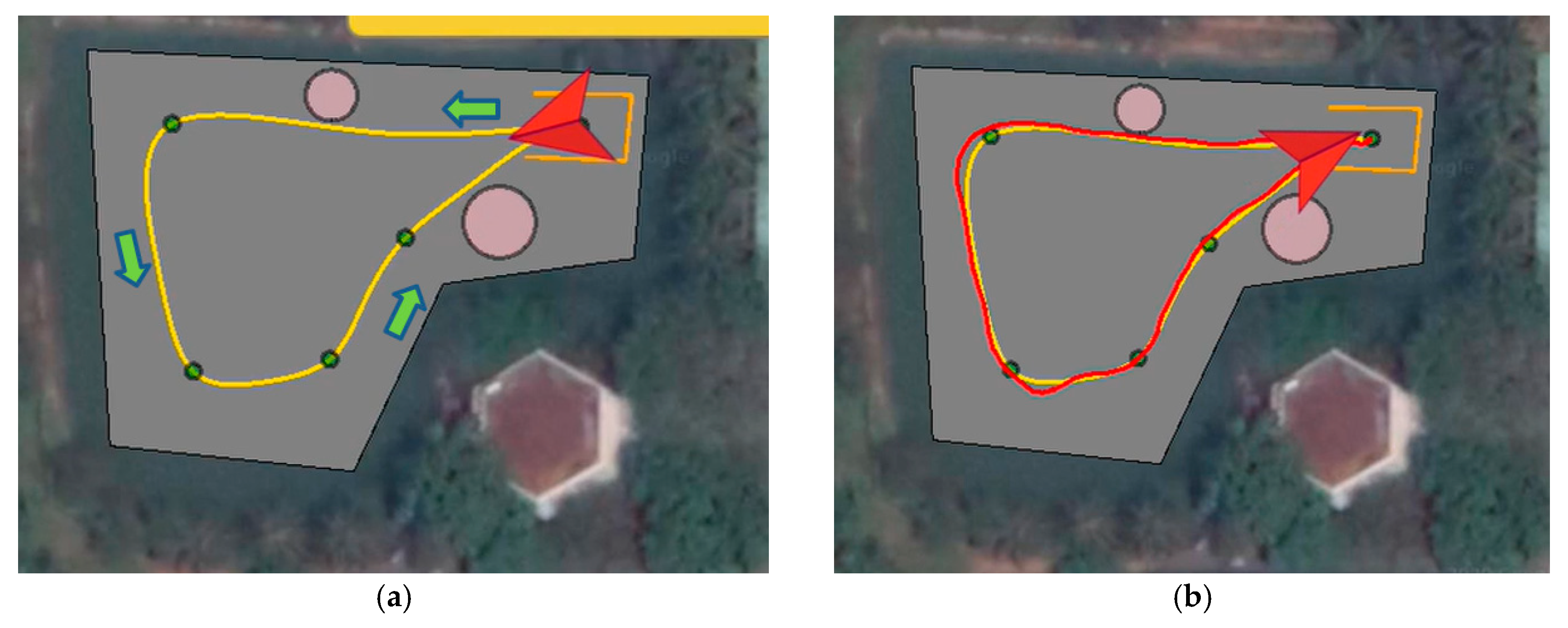
6.3. Experimental Result of B-Spline Path Planner and Continuous LOS Path Follower
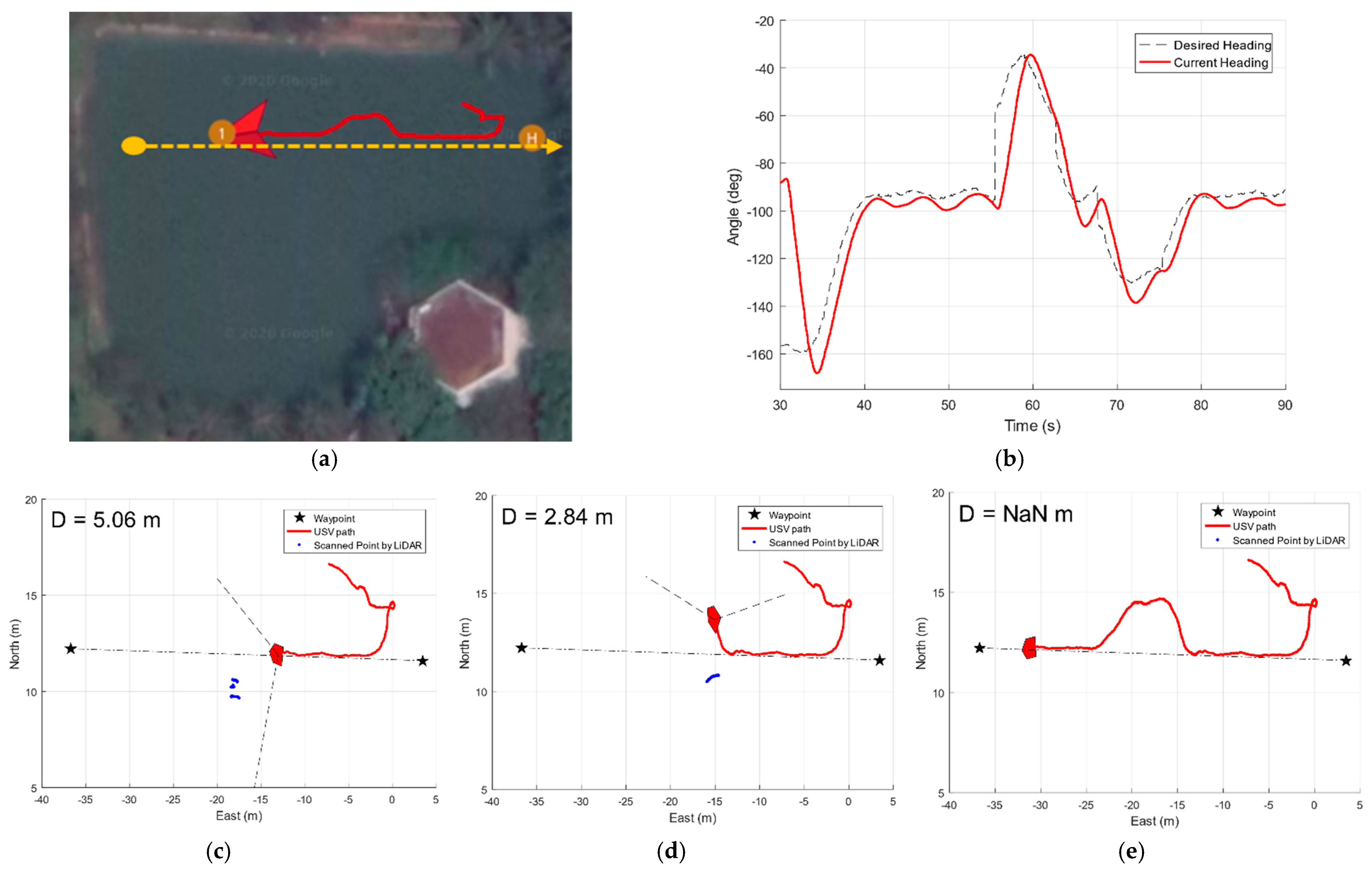
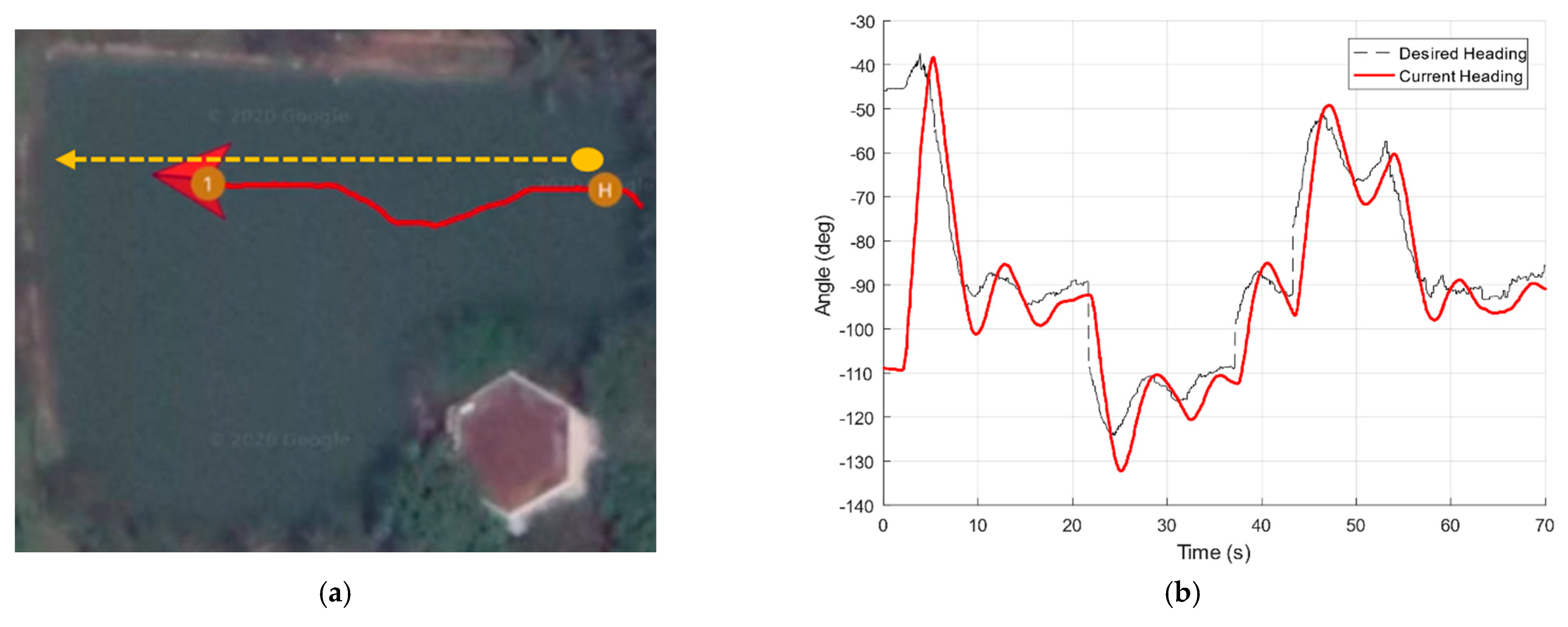
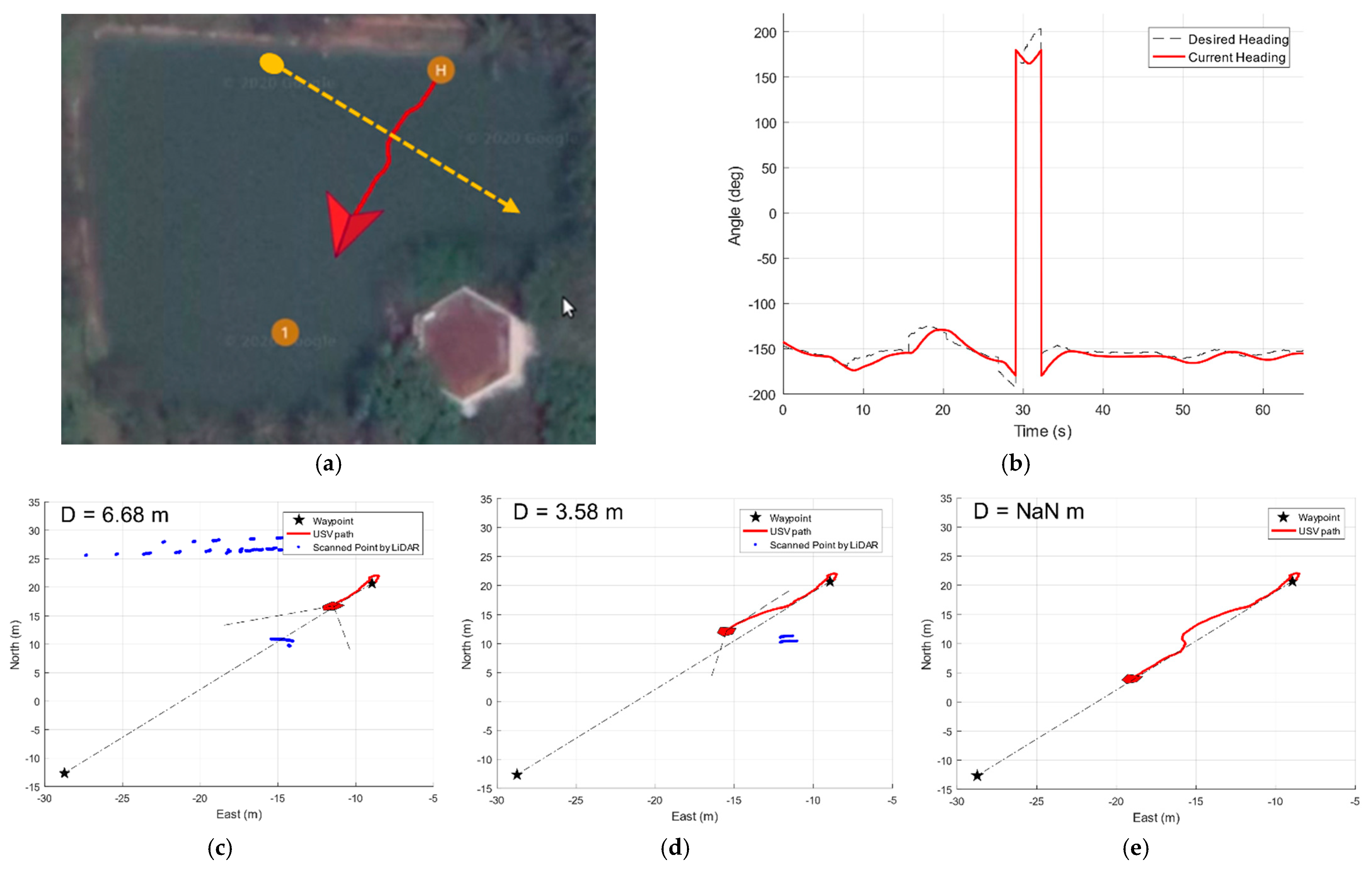
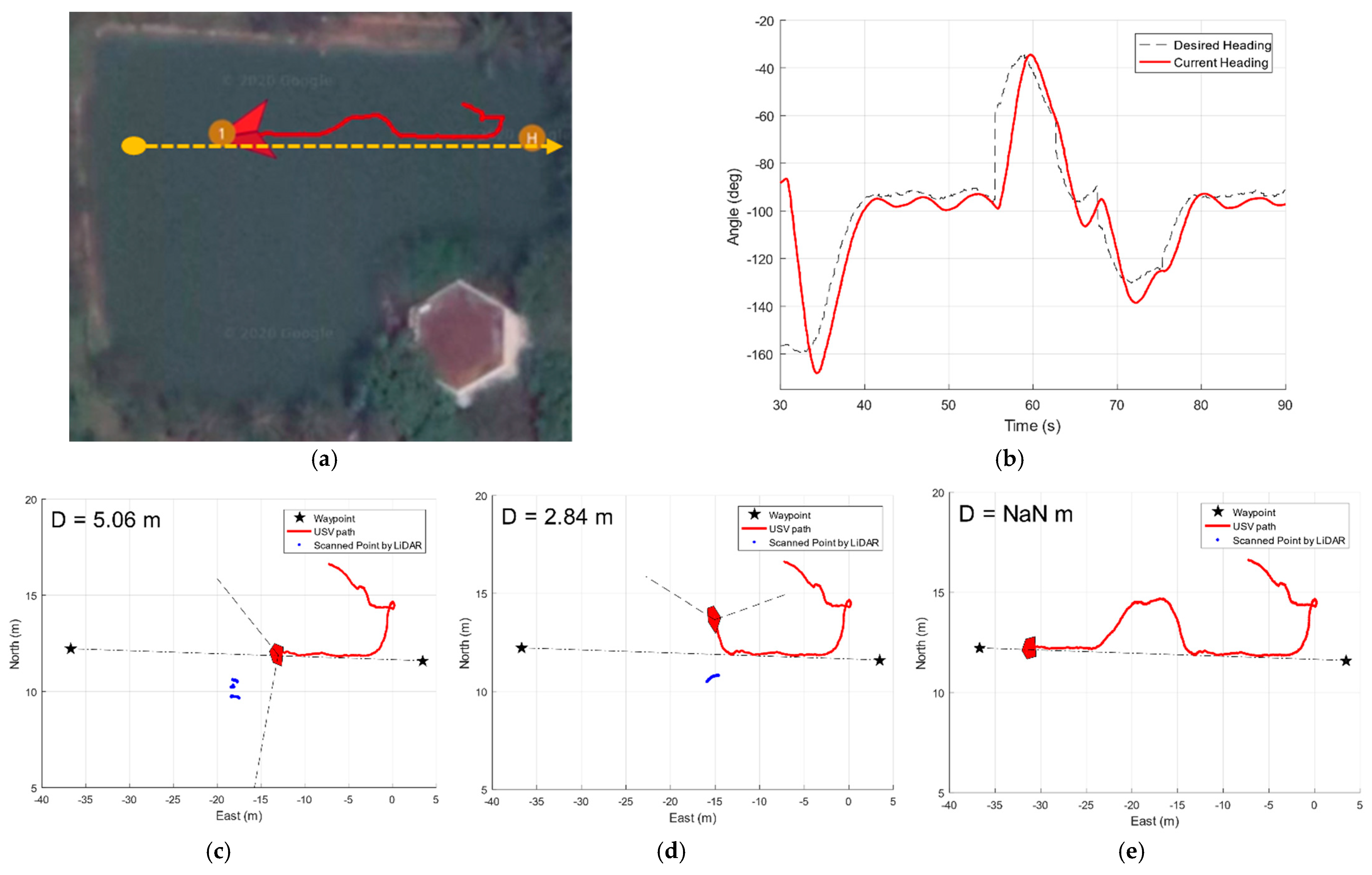
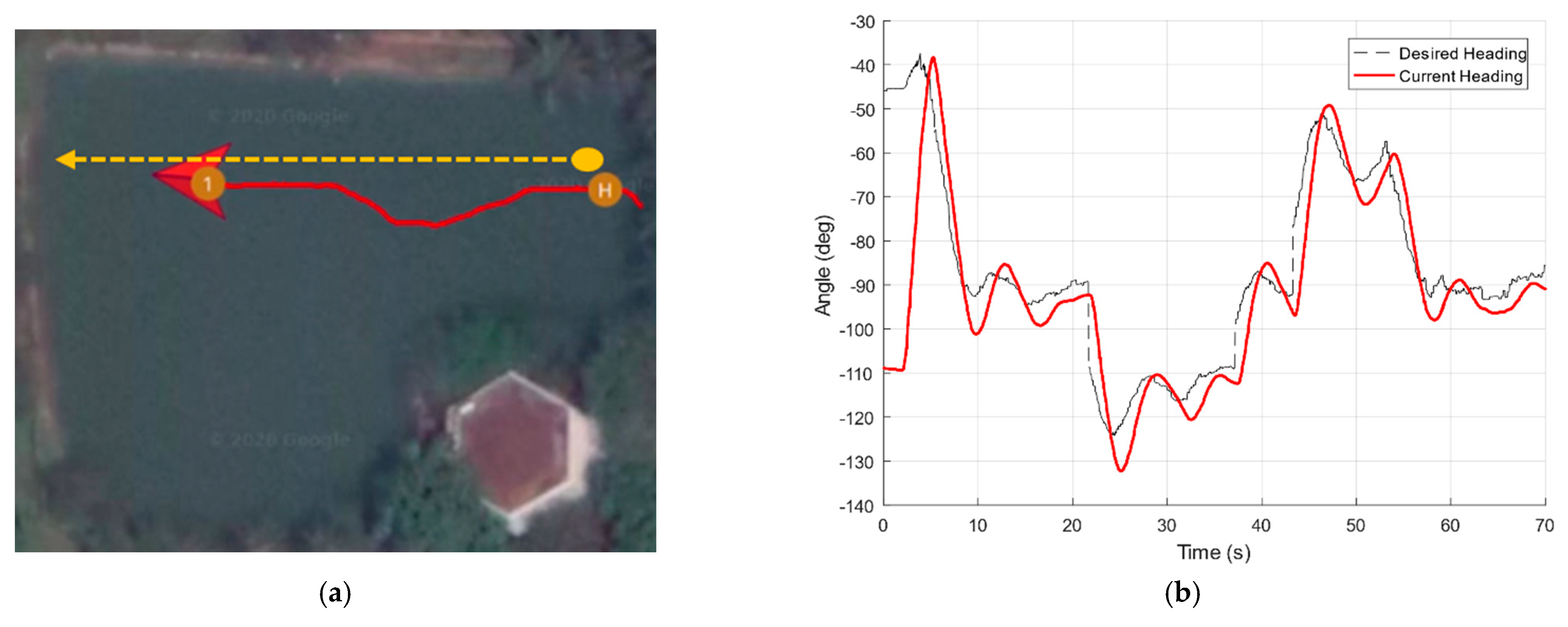
6.4. Experimental Result of Advanced SBG for Obstacle Avoidance
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Curcio, J.; Leonard, J.; Patrikalakis, A. SCOUT—A low cost autonomous surface platform for research in cooperative autonomy. In Proceedings of the OCEANS 2005 MTS/IEEE, Washington, DC, USA, 17–23 September 2006. [Google Scholar]
- Hitz, G.; Gotovos, A.; Pomerleau, F.; Garneau, M.-É.; Pradalier, C.; Krause, A.; Siegwart, R.Y. Fully autonomous focused exploration for robotic environmental monitoring. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014. [Google Scholar]
- Yang, T.; Hsiung, S.; Kuo, C.; Tsai, Y.; Peng, K.; Hsieh, Y.; Shen, Z.; Feng, J.; Kuo, C. Development of unmanned surface vehicle for water quality monitoring and measurement. In Proceedings of the 2018 IEEE International Conference on Applied System Invention (ICASI), Chiba, Japan, 13–17 April 2018. [Google Scholar]
- Manley, J.E. Unmanned surface vehicles, 15 years of development. In Proceedings of the OCEANS 2008, Quebec City, QC, Canada, 15–18 September 2008. [Google Scholar]
- Liu, Z.; Zhang, Y.; Yu, X.; Yuan, C. Unmanned surface vehicles: An overview of developments and challenges. Annu. Rev. Control 2016, 41, 71–93. [Google Scholar] [CrossRef]
- Wang, W.; Gheneti, B.; Mateos, L.A.; Duarte, F.; Ratti, C.; Rus, D. Roboat: An Autonomous Surface Vehicle for Urban Waterways. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 3–8 November 2019. [Google Scholar]
- Wang, W.; Shan, T.; Leoni, P.; Fernandez-Gutierrez, D.; Meyers, D.; Ratti, C.; Rus, D. Roboat II: A Novel Autonomous Surface Vessel for Urban Environments. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 25–29 October 2020. [Google Scholar]
- Tran, N.-H.; Nguyen, T.-C.; Tran, V.-T.; Nguyen, V.-C.; Nguyen, T.-N. The Design of an VIAM-USVI000 Unmanned Surface Vehicle for Environmental Monitoring Applications. In Proceedings of the 2018 4th International Conference on Green Technology and Sustainable Development (GTSD), Ho Chi Minh City, Vietnam, 23–24 November 2018. [Google Scholar]
- Tran, N.-H.; Nguyen, A.-D.; Nguyen, T.-N. A Genetic Algorithm Application in Planning Path Using B-Spline Model for Autonomous Underwater Vehicle (AUV). Appl. Mech. Mater. 2020, 902, 54–64. [Google Scholar] [CrossRef]
- De Boor, C. On calculating with B-splines. J. Approx. Theory 1972, 6, 50–62. [Google Scholar] [CrossRef] [Green Version]
- Katoch, S.; Chauhan, S.S.; Kumar, V. A review on genetic algorithm: Past, present, and future. Multimed. Tools Appl. 2021, 80, 8091–8126. [Google Scholar] [CrossRef] [PubMed]
- LaValle, S.M.; James, J.; Kuffner, J. Randomized Kinodynamic Planning. Int. J. Robot. Res. 2001, 20, 378–400. [Google Scholar] [CrossRef]
- Dubins, L. On Curves of Minimal Length with a Constraint on Average Curvature, and with Prescribed Initial and Terminal Positions and Tangents. Am. J. Math. 1957, 79, 497–516. [Google Scholar] [CrossRef]
- Fossen, T.I. Handbook of Marine Craft Hydrodynamics and Motion Control; John Wiley & Sons: Hoboken, NJ, USA, 2011; pp. 254–266. [Google Scholar]
- Fox, D.; Burgard, W.; Thrun, S. The dynamic window approach to collision avoidance. IEEE Robot. Autom. Mag. 1997, 4, 23–33. [Google Scholar] [CrossRef] [Green Version]
- Borenstein, J.; Koren, Y. The vector field histogram-fast obstacle avoidance for mobile robots. IEEE Trans. Robot. Autom. 1991, 7, 278–288. [Google Scholar] [CrossRef] [Green Version]
- Fiorini, P.; Shiller, Z. Motion Planning in Dynamic Environments Using Velocity Obstacles. Int. J. Robot. Res. 1998, 17, 760–772. [Google Scholar] [CrossRef]
- Kuwata, Y.; Wolf, M.T.; Zarzhitsky, D.; Huntsberger, T.L. Safe Maritime Autonomous Navigation with COLREGS, Using Velocity Obstacles. IEEE J. Ocean. Eng. 2014, 39, 110–119. [Google Scholar] [CrossRef]
- Moe, S.; Pettersen, K.Y. Set-based Line-of-Sight (LOS) path following with collision avoidance for underactuated unmanned surface vessel. In Proceedings of the 2016 24th Mediterranean Conference on Control and Automation (MED), Athens, Greece, 21–24 June 2016. [Google Scholar]
- Tran, N.-H.; Vu, M.-H.; Nguyen, T.-C.; Phan, M.-T.; Pham, Q.-H. Implementation and Enhancement of Set-Based Guidance by Velocity Obstacle along with LiDAR for Unmanned Surface Vehicles. In Proceedings of the 2020 5th International Conference on Green Technology and Sustainable Development (GTSD), Ho Chi Minh City, Vietnam, 27–28 November 2020. [Google Scholar]
- Hoschek, J.; Lasser, D. Fundamentals of Computer Aided Geometric Design; AK Peters, Ltd.: Natick, MA, USA, 1996. [Google Scholar]
- Tiller, W.; Piegl, L. The NURBS Book; Springer: Berlin, Germany, 1997. [Google Scholar]
- Bäck, T. Evolutionary Algorithms in Theory and Practice: Evolution Strategies, Evolutionary Programming, Genetic Algorithms; Oxford University Press: New York, NY, USA, 1996. [Google Scholar]
- Farin, G.; Hoschek, J.; Kim, M.-S. A History of Curves and Surfaces in CAGD. In Handbook of Computer Aided Geometric Design; Elsevier: Amsterdam, The Netherlands, 2002; pp. 1–21. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component | Specification |
|---|---|
| Embedded computer | 1× nVIDIA Jetson Nano |
| Microcontroller | 1× STM32F407 |
| Rear thruster | 2× Endura C2 30 |
| Side thruster | 2× BlueRobotics T200 |
| RC controller | 1× RadioLink AT9S |
| LiDAR | 1× Hokuyo UTM-30LX |
| AHRS | 1× Patech RTxQ |
| GNSS receiver | 1× Here+ RTK GNSS |
| Wireless router | 1× TP-Link TL-WR940N |
| Input Vessel’s current center of navigation . Parameterized curve . |
| Output Projection onto the curve. |
Process
|
| Case | ||
|---|---|---|
| Overtaking | ||
| Crossing (from left) | ||
| Head-on | ||
| Head-on | ||
| Crossing (from right) | ||
| Overtaking |
| Criteria | Case 1 | Case 2 |
|---|---|---|
| Length of planned path (m) | 113.8323 | 112.7625 |
| Travelled distance (m) | 111.3862 | 111.7344 |
| Root-mean-square CTE (m) | 0.1754 | 0.4500 |
| Root-mean-square heading error (deg) | 6.0976 | 13.4719 |
| Distance deviation from WP2 (m) | 0.0085 | 0.1498 |
| Distance deviation from WP3 (m) | 0.0040 | 0.0158 |
| Distance deviation from WP4 (m) | 0.0017 | 0.0003 |
| Distance deviation from WP5 (m) | 0.0001 | 0.0001 |
| Direction | Radius of Turning (m) |
|---|---|
| Counterclockwise | 3.92–4.30 |
| Clockwise | 3.82–4.25 |
| Parameter | Value |
|---|---|
| Degree of B-Spline | 4 |
| Number of generations | 200 |
| Number of individuals per population | 100 |
| Number of selected individuals | 50 |
| Mutation rate | 10% |
| Criteria | Value |
|---|---|
| Average speed (m/s) | 0.55 |
| Travelled distance (m) | 118.5311 |
| Root-mean-square CTE (m) | 0.2868 |
| Root-mean-square heading error (deg) | 5.7701 |
| Distance deviation from WP2 (m) | 0.4762 |
| Distance deviation from WP3 (m) | 0.4509 |
| Distance deviation from WP4 (m) | 0.4306 |
| Distance deviation from WP5 (m) | 0.4466 |
| Parameter | Value |
|---|---|
| Safety distance (m) | 2.5 |
| Distance to avoid (m) | 5 |
| Velocity of vessel (m/s) | 1 |
| Velocity of obstacle (m/s) | 0.7 |
| Maximum measurable distance (m) | 30 |
| Minimum measurable distance (m) | 0.1 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tran, N.-H.; Pham, Q.-H.; Lee, J.-H.; Choi, H.-S. VIAM-USV2000: An Unmanned Surface Vessel with Novel Autonomous Capabilities in Confined Riverine Environments. Machines 2021, 9, 133. https://doi.org/10.3390/machines9070133
Tran N-H, Pham Q-H, Lee J-H, Choi H-S. VIAM-USV2000: An Unmanned Surface Vessel with Novel Autonomous Capabilities in Confined Riverine Environments. Machines. 2021; 9(7):133. https://doi.org/10.3390/machines9070133
Chicago/Turabian StyleTran, Ngoc-Huy, Quang-Ha Pham, Ji-Hyeong Lee, and Hyeung-Sik Choi. 2021. "VIAM-USV2000: An Unmanned Surface Vessel with Novel Autonomous Capabilities in Confined Riverine Environments" Machines 9, no. 7: 133. https://doi.org/10.3390/machines9070133
APA StyleTran, N.-H., Pham, Q.-H., Lee, J.-H., & Choi, H.-S. (2021). VIAM-USV2000: An Unmanned Surface Vessel with Novel Autonomous Capabilities in Confined Riverine Environments. Machines, 9(7), 133. https://doi.org/10.3390/machines9070133