
Human Gait Data Augmentation and Trajectory Prediction for Lower-Limb Rehabilitation Robot Control Using GANs and Attention Mechanism




Abstract
:1. Introduction
2. Related Work
3. Materials and Methods
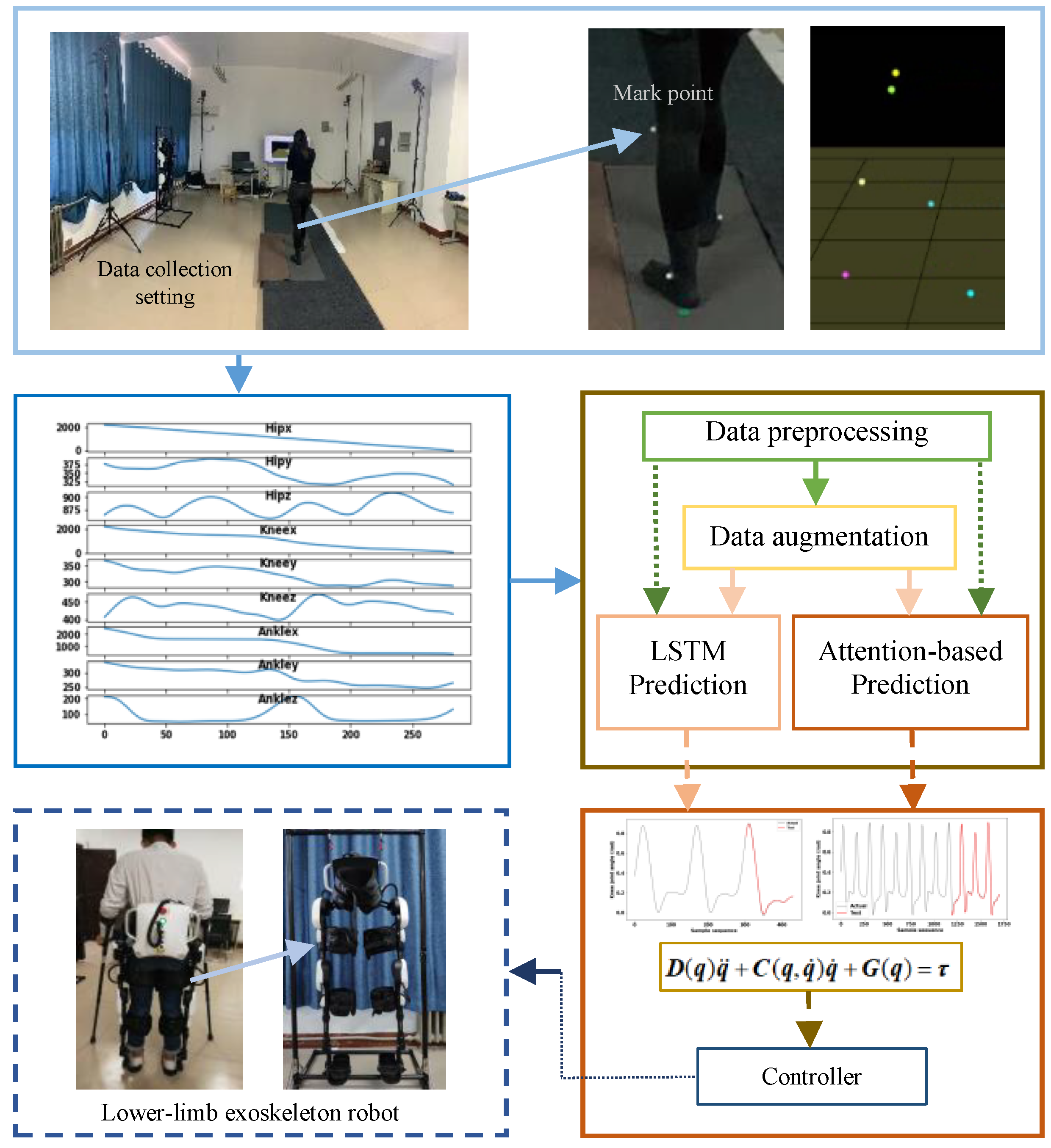
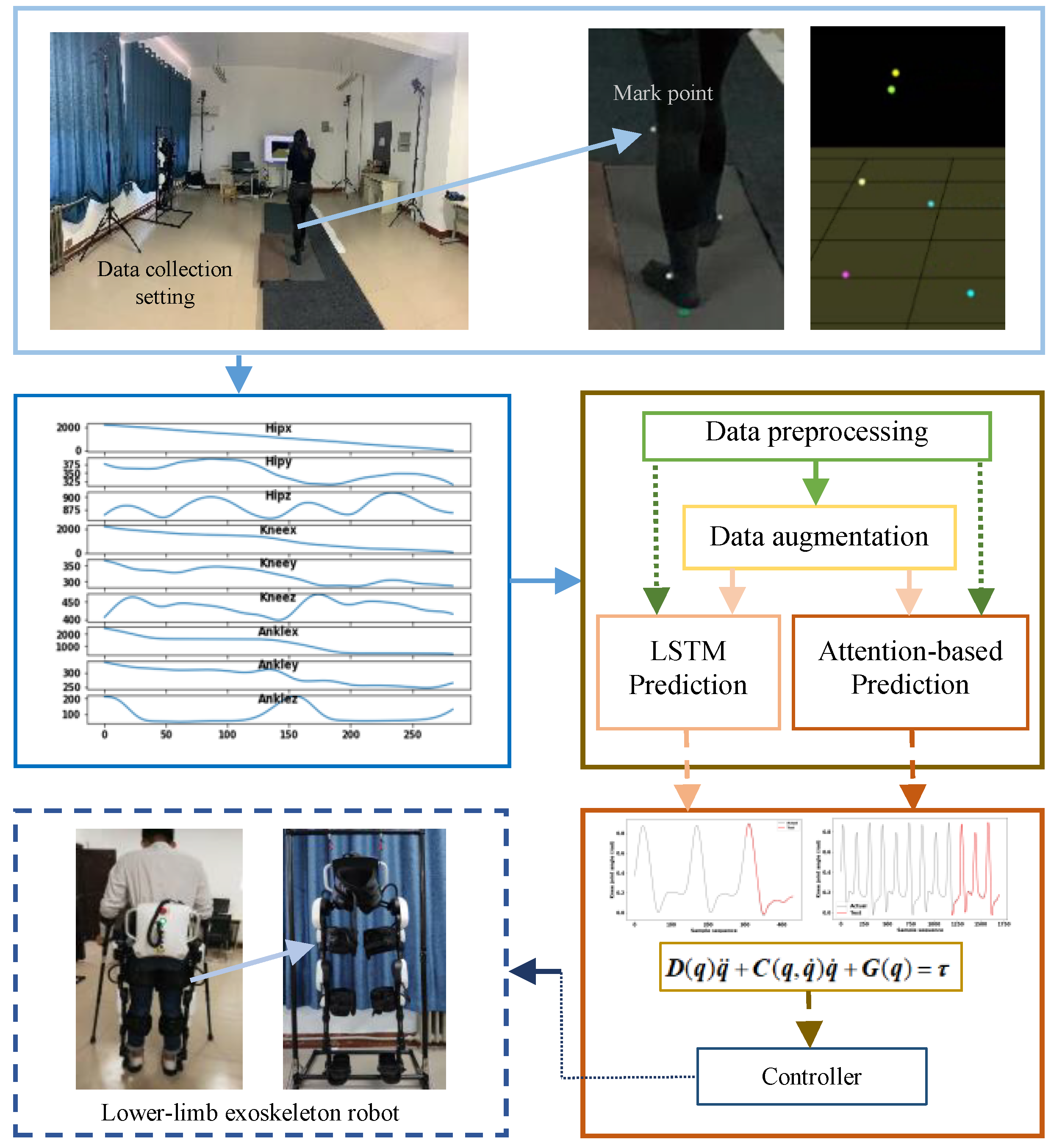
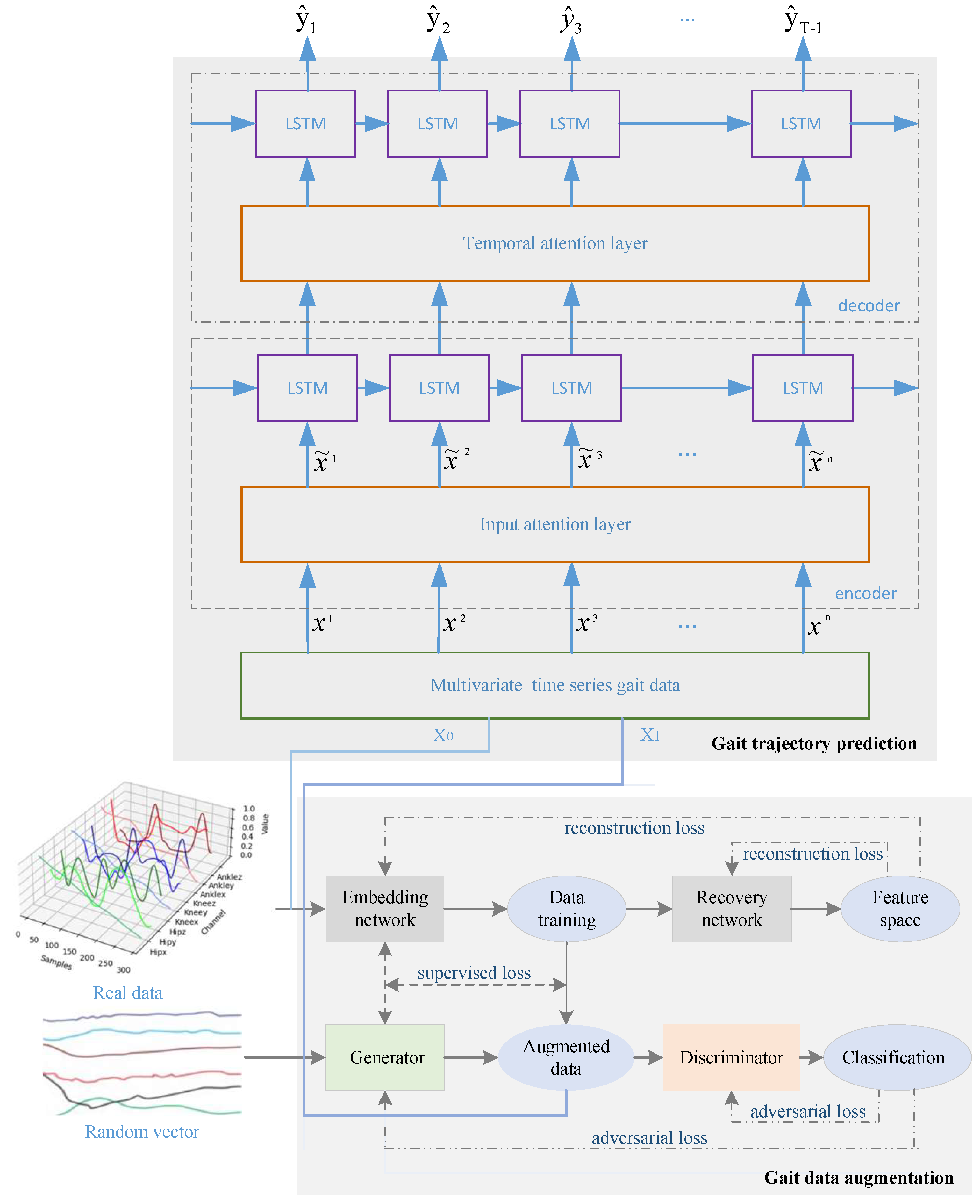
3.1. Framework
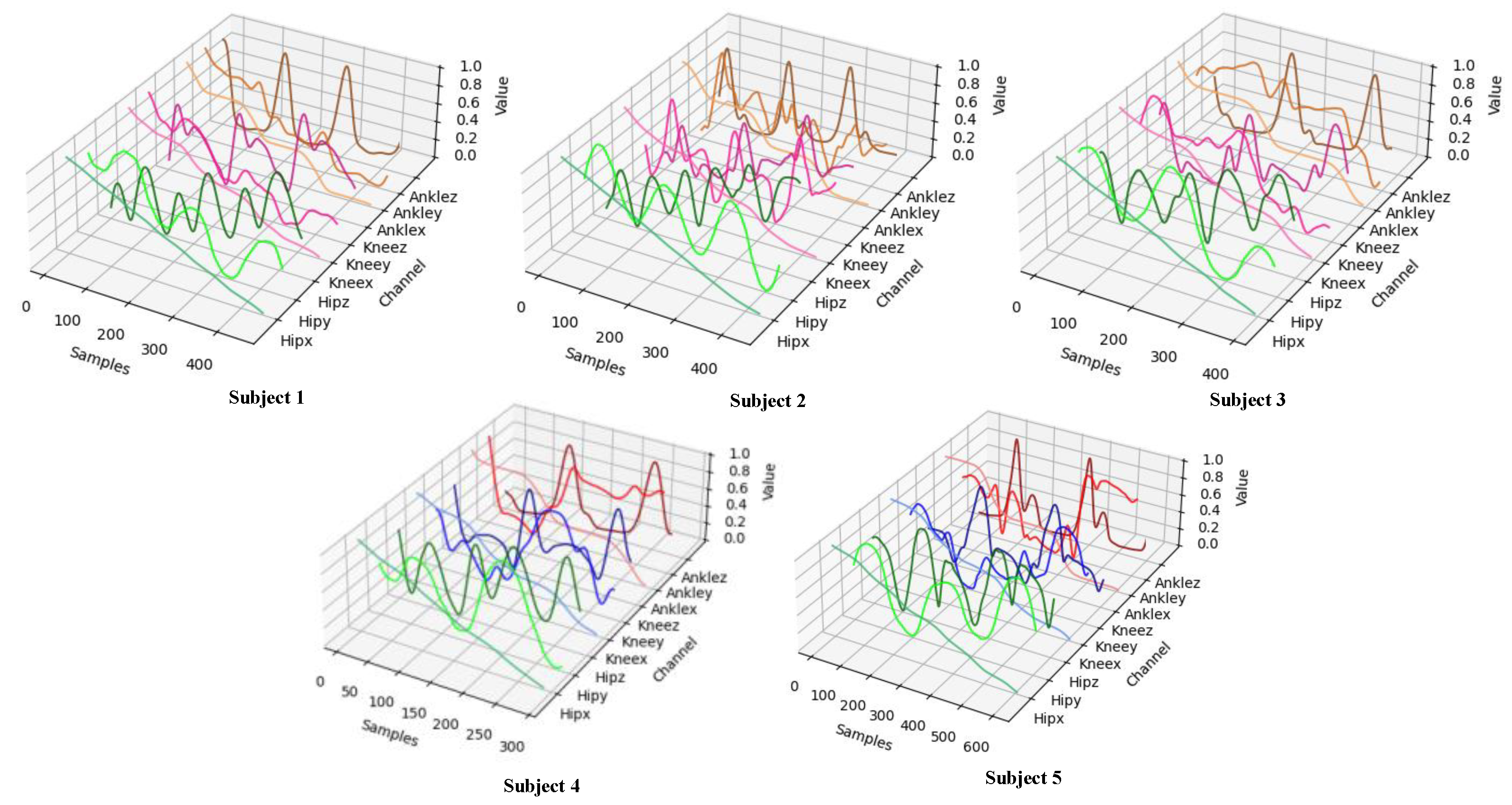
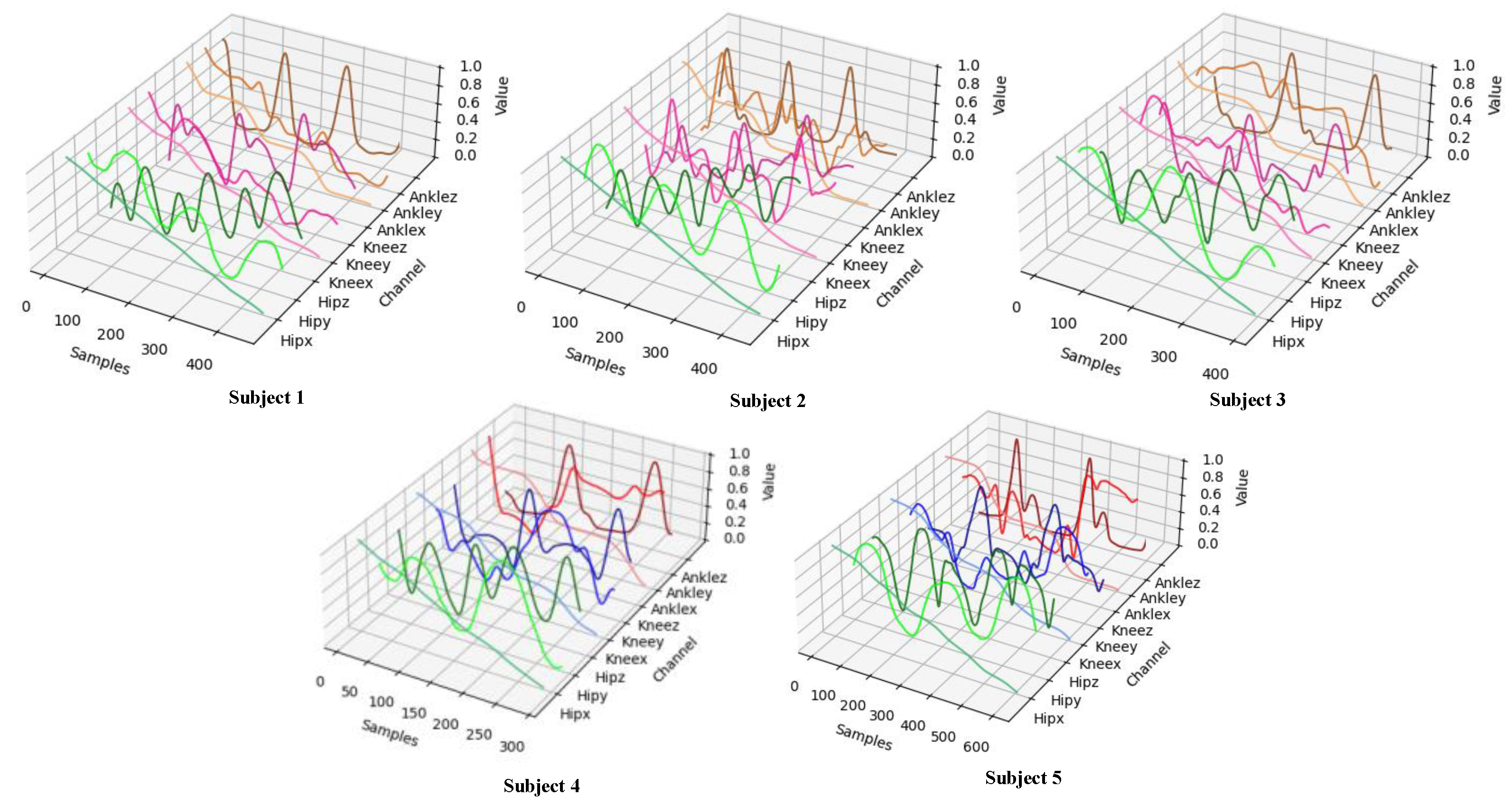
3.2. Data Acquisition
3.3. Models
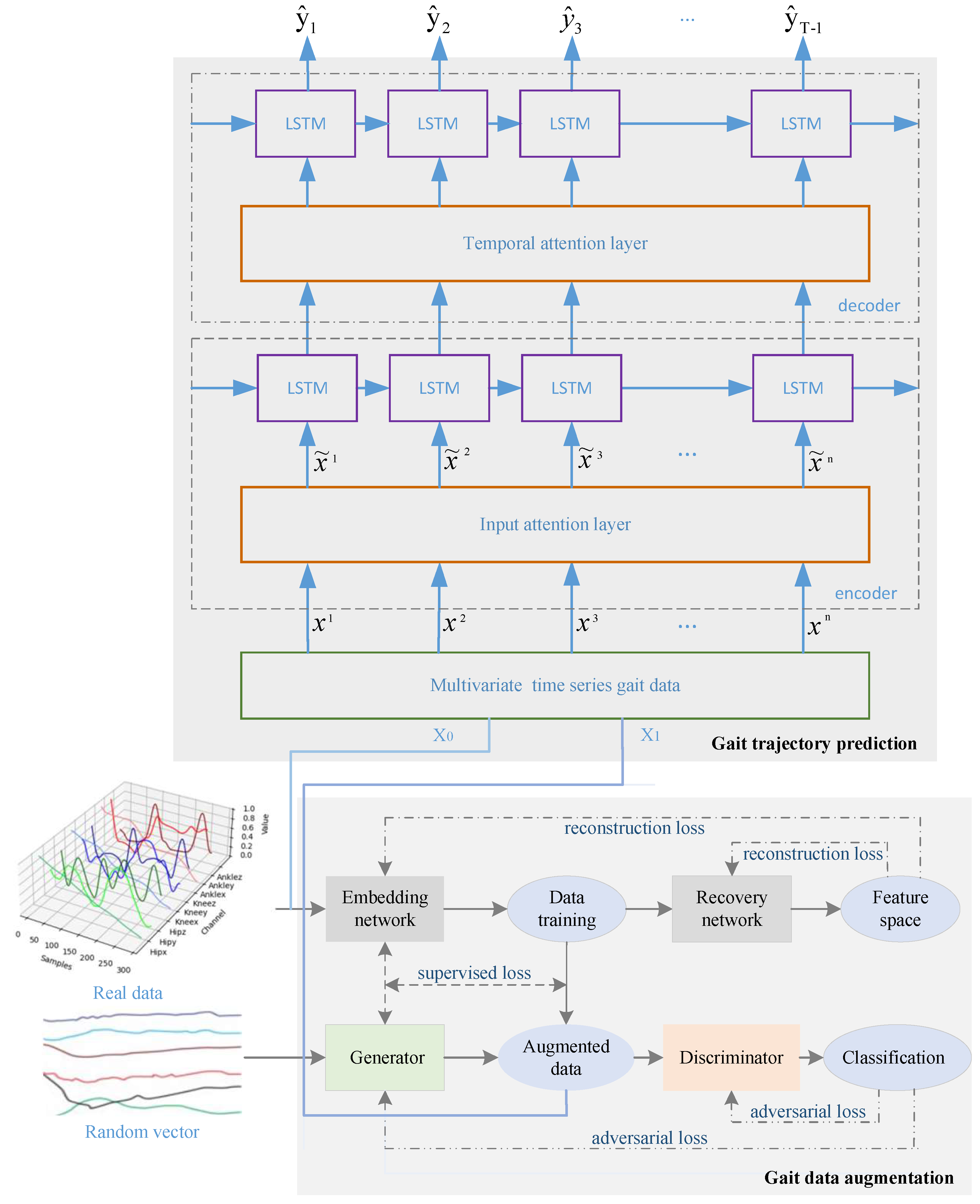
3.3.1. GAN-Based Gait Data Augmentation Model
3.3.2. LSTM Prediction Model
3.3.3. Attention-Based Gait Trajectory Prediction Model
3.3.4. Experimental Setup
3.3.5. Evaluation
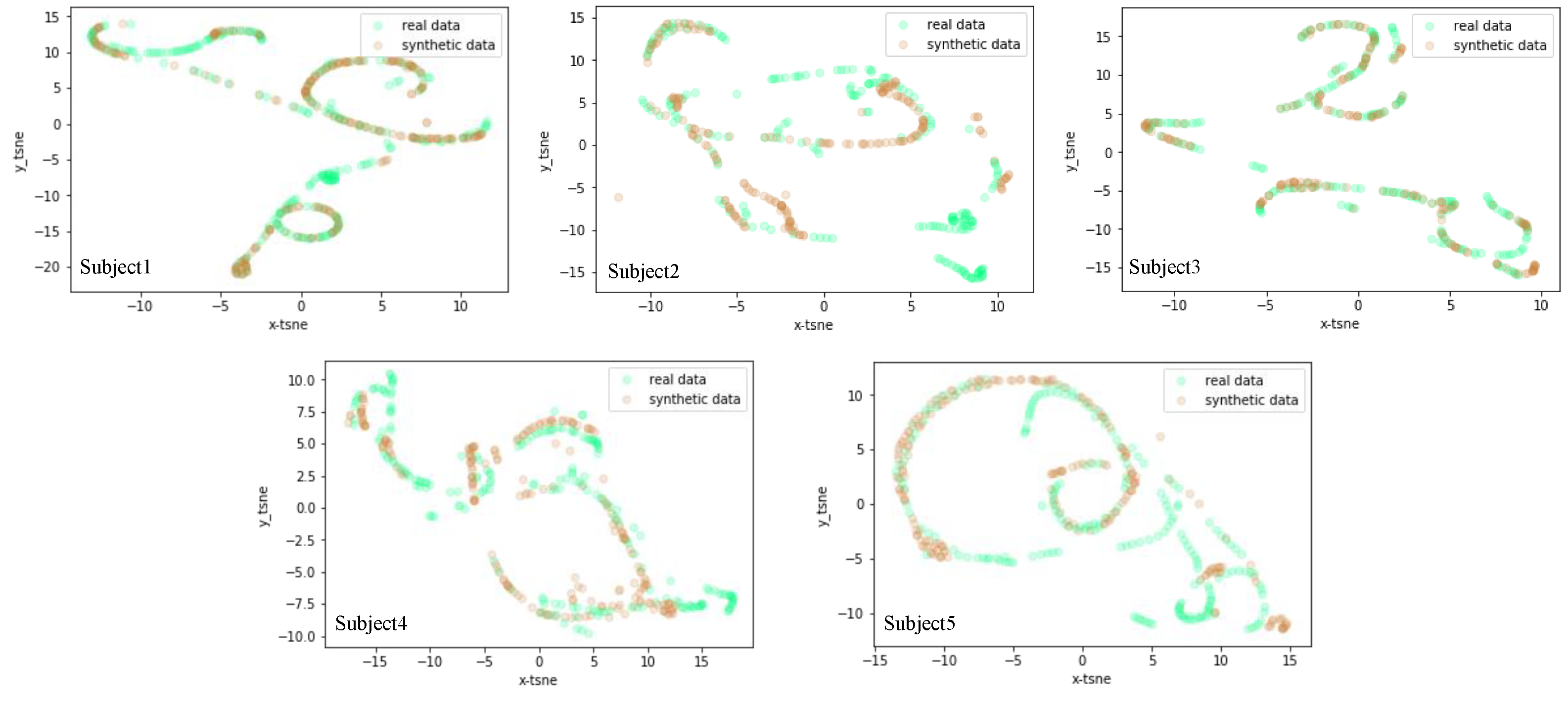
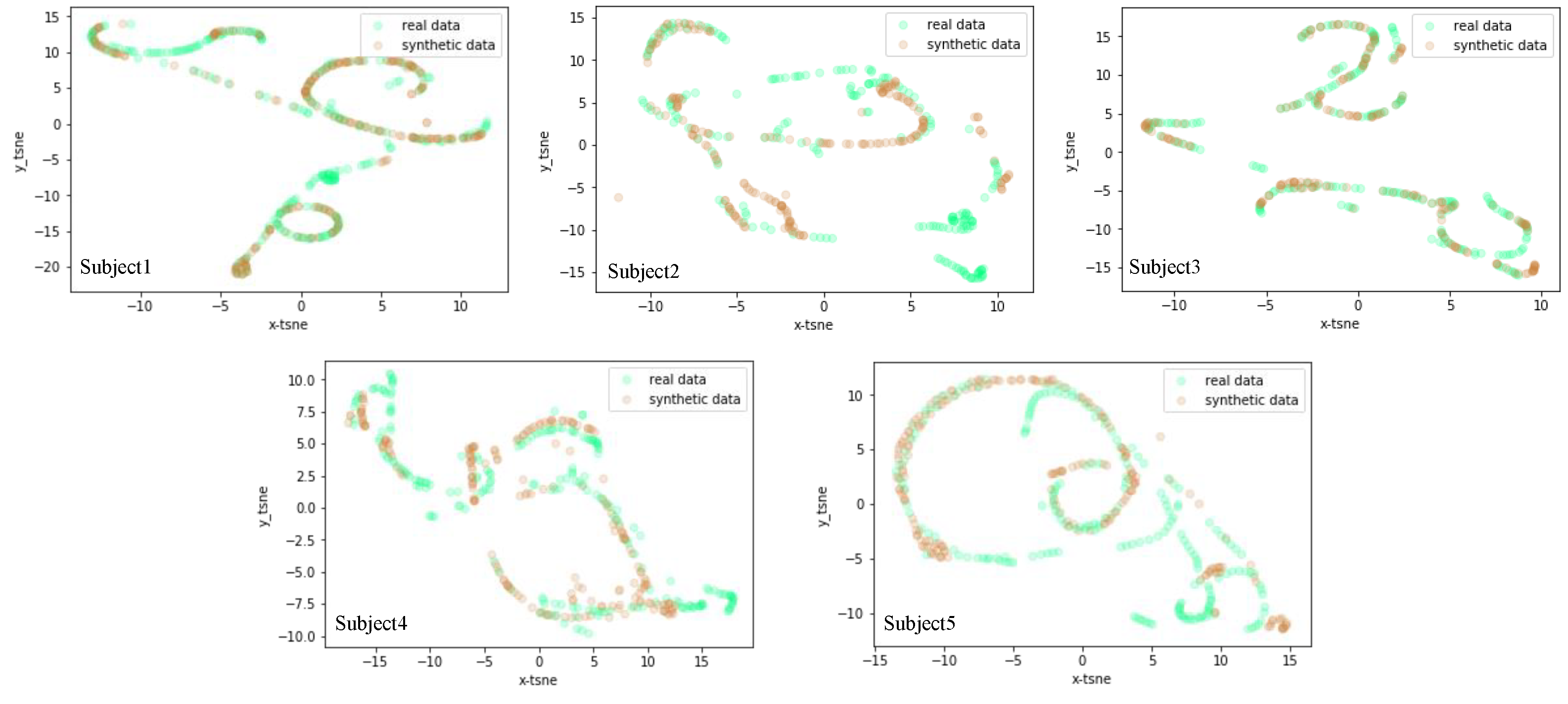
t-SNE
MAE
RMSE
4. Results
4.1. Gait Data Augmentation
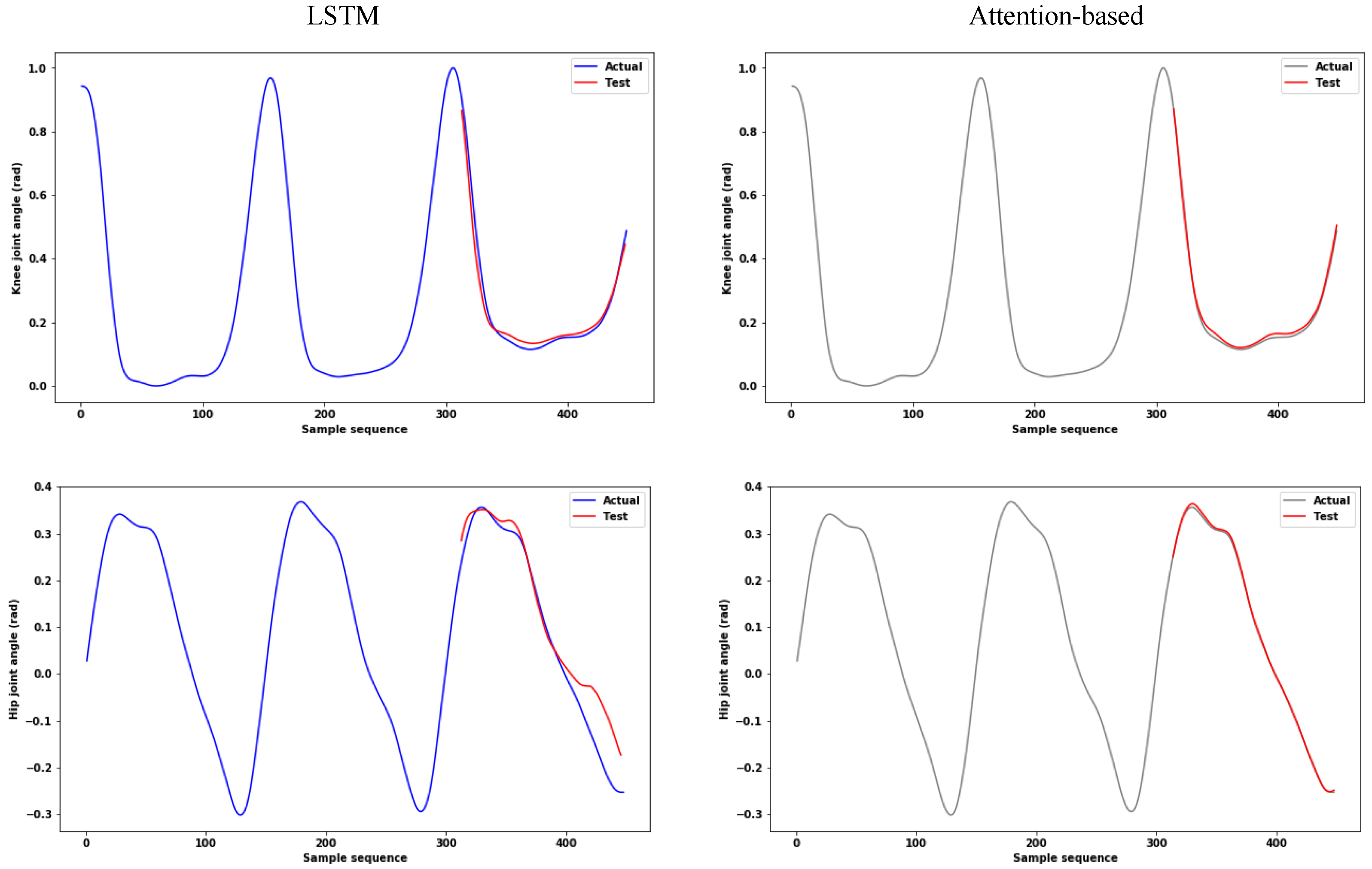
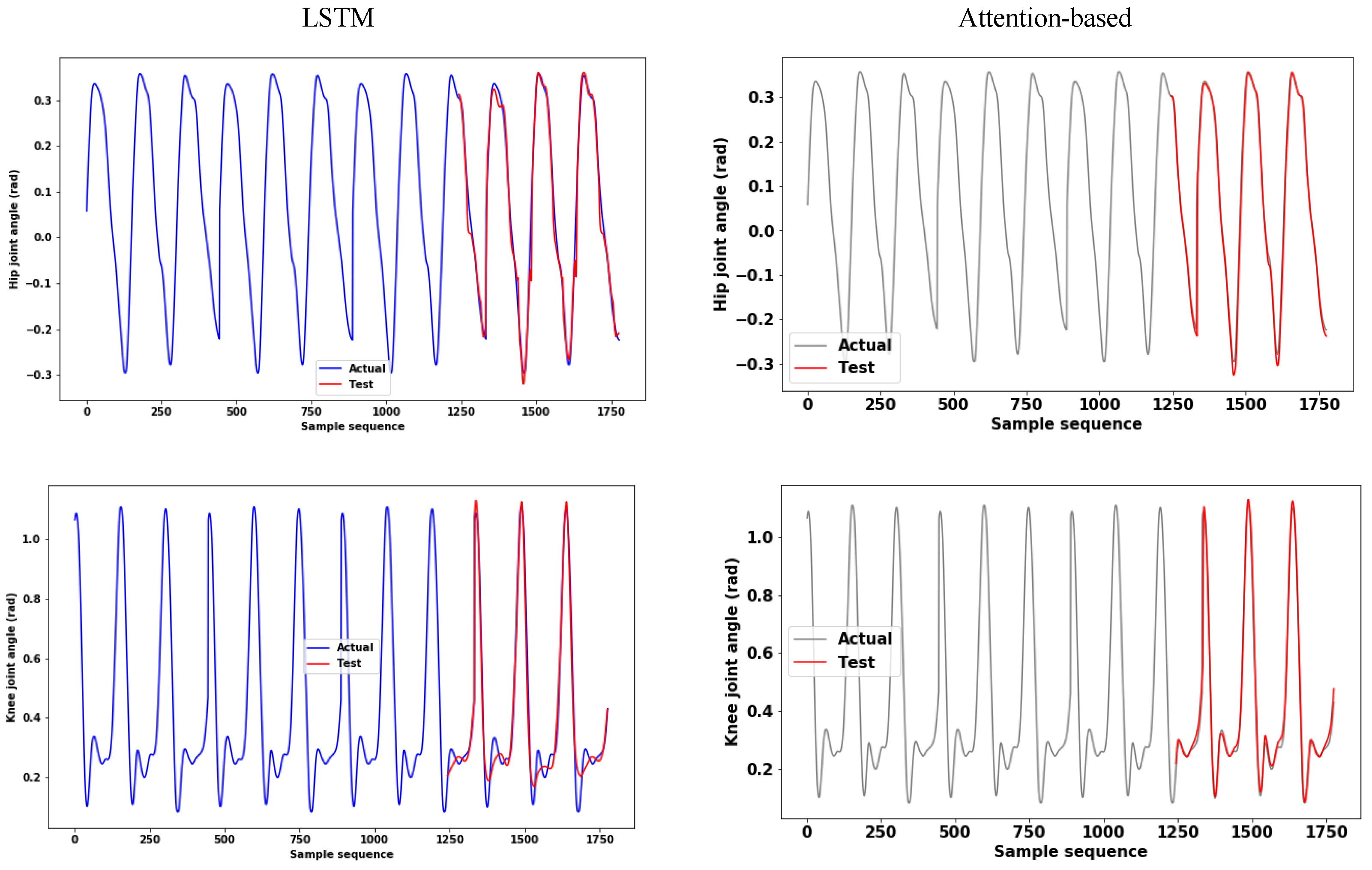
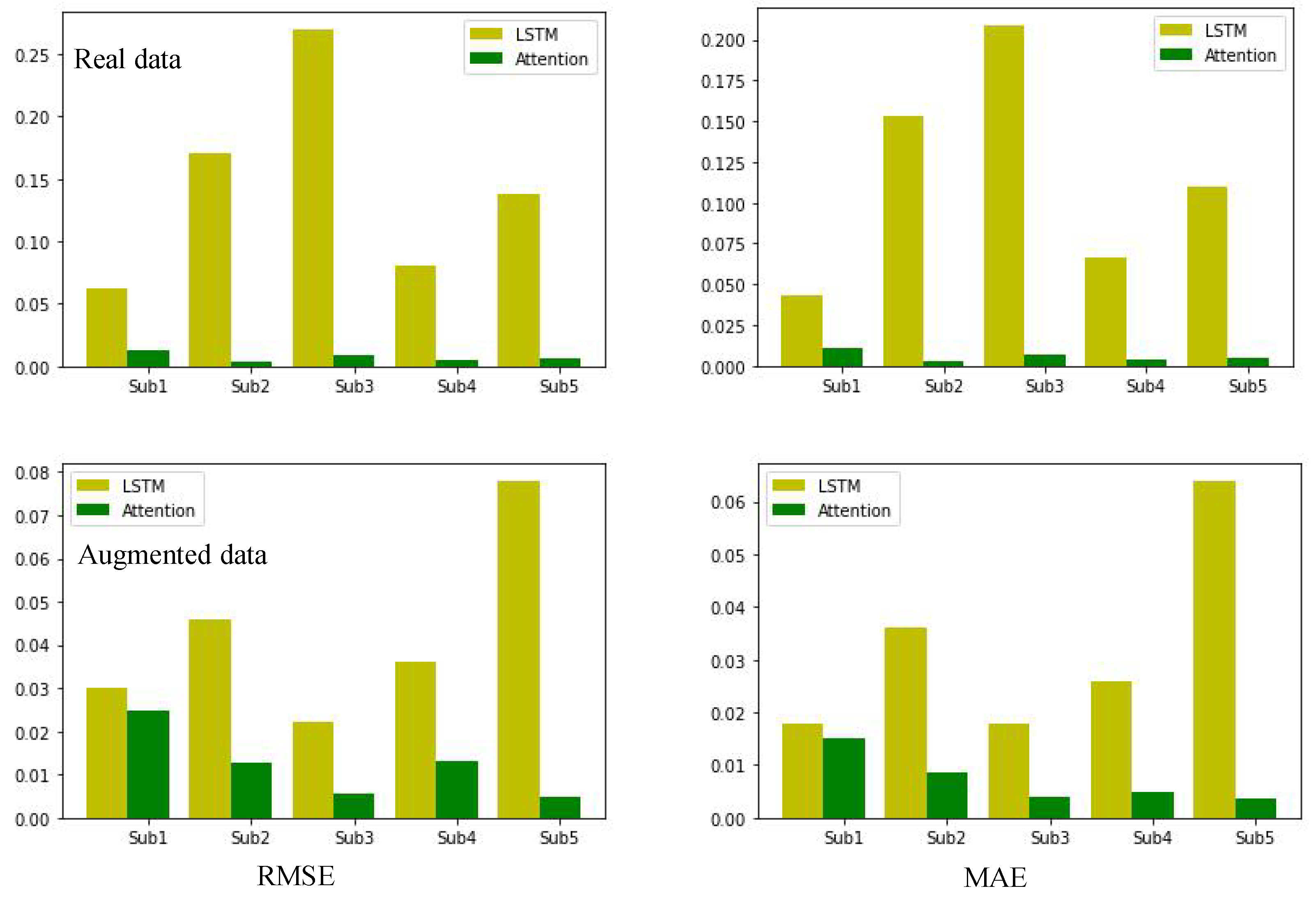
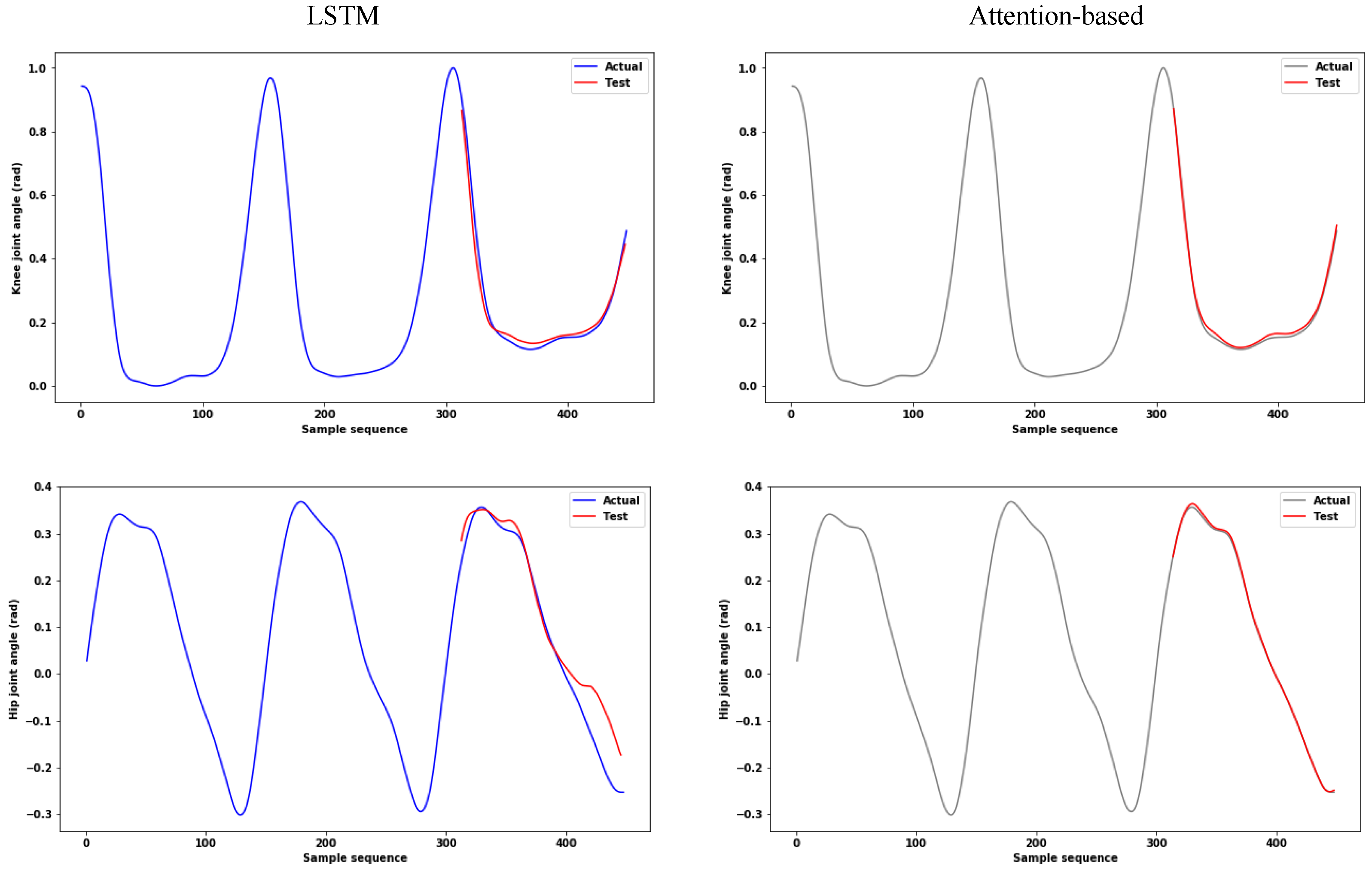
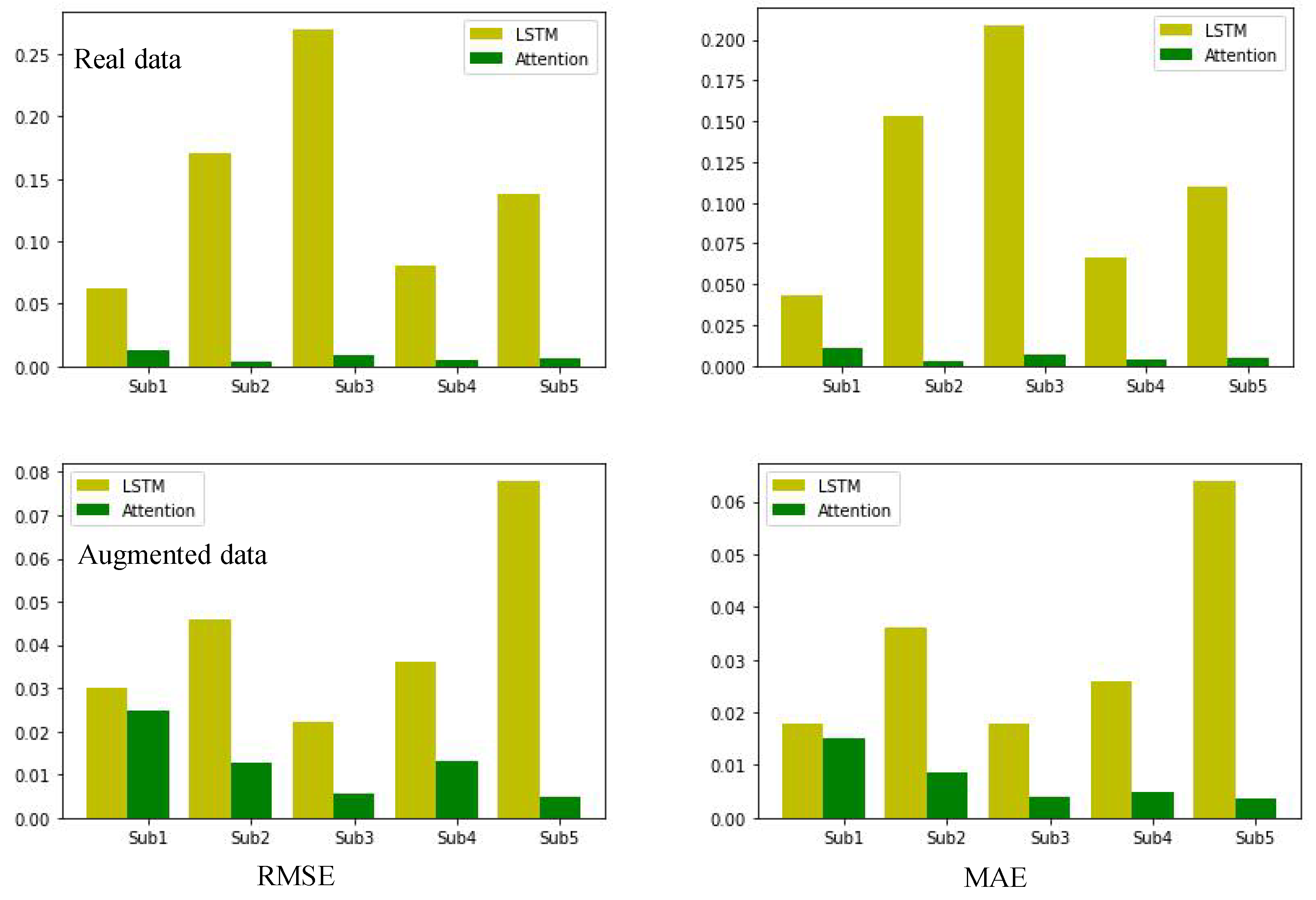
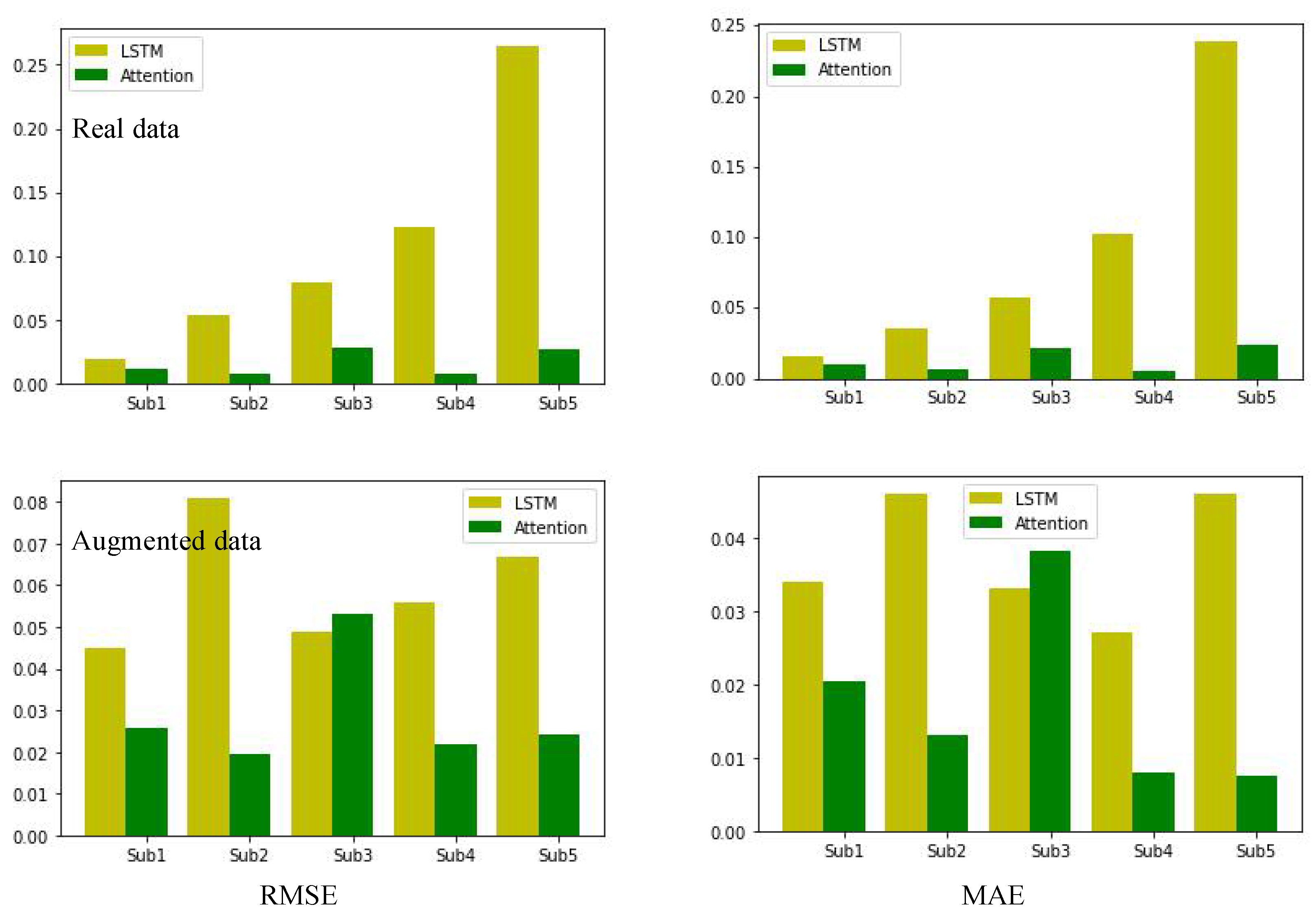
4.2. Gait Trajectory Prediction
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Hobbs, B.; Artemiadis, P. A Review of Robot-Assisted Lower-Limb Stroke Therapy: Unexplored Paths and Future Directions in Gait Rehabilitation. Front. Neurorobotics 2020, 14, 1–19. [Google Scholar] [CrossRef] [Green Version]
- Marotta, N.; Demeco, A.; Indino, A.; de Scorpio, G.; Moggio, L.; Ammendolia, A. Nintendo Wii versus Xbox Kinect for functional locomotion in people with Parkinson’s disease: A systematic review and network meta-analysis. Disabil. Rehabil. 2020, 6, 1–6. [Google Scholar] [CrossRef] [PubMed]
- Meyer, B.M.; Tulipani, L.J.; Gurchiek, R.D.; Allen, D.A.; Adamowicz, L.; Larie, D.; Solomon, A.J.; Cheney, N.; McGinnis, R.S. Wearables and deep learning classify fall risk from gait in multiple sclerosis. IEEE J. Biomed. Health Inform. 2020, 25, 1824–1831. [Google Scholar] [CrossRef]
- Antonio, R.F.; Joan, L.P.; Josep, M.L. Systematic review on wearable lower-limb exoskeletons for gait training in neuromuscular impairments. J. Neuroeng. Rehabil. 2021, 18, 1–21. [Google Scholar]
- Maria, F.B.; Corrado, M.; Maria, C.C.; Alessia, B.; Placido, B.; Rocco, S.C. What does best evidence tell us about robotic gait rehabilitation in stroke patients: A systematic review and meta-analysis. J. Clin. Neurosci. 2018, 48, 11–17. [Google Scholar]
- Bryce, T.; Dijkers, M.; Kozlowski, A. Framework for Assessment of the Usability of Lower-Extremity Robotic Exoskeletal Orthoses. Am. J. Phys. Med. Rehabil. 2015, 94, 1000–1014. [Google Scholar] [CrossRef] [PubMed]
- Moggio, L.; de Sire, A.; Marotta, N.; Demeco, A.; Ammendolia, A. Exoskeleton versus end-effector robot-assisted therapy for finger-hand motor recovery in stroke survivors: Systematic review and meta-analysis. Top. Stroke Rehabil. 2021, 8, 1–12. [Google Scholar] [CrossRef]
- Gassert, R.; Dietz, V. Rehabilitation robots for the treatment of sensorimotor deficits: A neurophysiological perspective. J. Neuroeng. Rehabil. 2018, 15, 1–15. [Google Scholar] [CrossRef] [Green Version]
- Lokomat®. Available online: https://www.hocoma.com/solutions/lokomat/ (accessed on 12 November 2021).
- Maranesi, E.; Riccardi, G.R.; Di Donna, V.; Di Rosa, M.; Fabbietti, P.; Luzi, R.; Pranno, L.; Lattanzio, F.; Bevilacqua, R. Effectiveness of Intervention Based on End-effector Gait Trainer in Older Patients With Stroke: A Systematic Review. J. Am. Med Dir. Assoc. 2019, 21, 1036–1044. [Google Scholar] [CrossRef] [PubMed]
- Gait Trainer GT II. Available online: https://reha-stim.com/document/gait-trainer-gtii/ (accessed on 14 November 2021).
- Miguel, D.S.M.; Luis, J.A.M.; Marcela, M.; Carlos, A.C.G. Impedance-based backdrivability recovery of a lower-limb exoskeleton for knee rehabilitation. In Proceedings of the 2019 IEEE 4th Colombian Conference on Automatic Control (CCAC), Medellin, Colombia, 15–18 October 2019. [Google Scholar]
- Phoenix. Available online: http://www.suitx.com/phoenix (accessed on 14 November 2021).
- Esquenazi, A.; Talaty, M.; Packel, A.; Saulino, M. The ReWalk powered exoskeleton to restore ambulatory function to individuals with thoracic-level motor-complete spinal cord injury. Am. J. Phys. Med. Rehabil. 2012, 91, 911–921. [Google Scholar] [CrossRef] [Green Version]
- Shi, D.; Zhang, W.; Zhang, W.; Ding, X.L. A Review on Lower Limb Rehabilitation Exoskeleton Robots. Chin. J. Mech. Eng. 2019, 32, 1–11. [Google Scholar] [CrossRef] [Green Version]
- Goodfellow, I.J.; Jean, P.A.; Mirza, M.; Xu, B. Generative Adversarial Networks. Adv. Neural Inf. Process. Syst. 2014, 3, 2672–2680. [Google Scholar] [CrossRef]
- Contreras-Vidal, J.L.; Bhagat, N.A.; Brantley, J.; Cruz-Garza, J.G.; He, Y.T.; Manley, Q.; Nakagome, S.; Nathan, K.; Tan, S.H.; Zhu, F.S.; et al. Powered exoskeletons for bipedal locomotion after spinal cord injury. J. Neural Eng. 2016, 13, 031001. [Google Scholar] [CrossRef] [PubMed]
- Iwana, B.K.; Uchida, S. An empirical survey of data augmentation for time series classification with neural networks. PLoS ONE 2021, 16, 1–32. [Google Scholar] [CrossRef] [PubMed]
- Hassan, I.F.; Germain, F.; Jonathan, W.; Lhassane, I.; Muller, P.A. Data augmentation using synthetic data for time series classification with deep residual networks. arXiv 2018, arXiv:1808.02455. [Google Scholar]
- Terry, T.U.; Franz, M.J.P.; Daniel, P.; Satoshi, E.; Muriel, L.; Sandra, H.; Urban, F.; Dana, K. Data augmentation of wearable sensor data for parkinson’s disease monitoring using convolutional neural networks. In Proceedings of the 19th ACM International Conference on Multimodal Interaction(ICMI), Glasgow, UK, 13–17 November 2017. [Google Scholar]
- Alzantot, M.; Chakraborty, S.; Srivastava, M.B. Sensegen: A deep learning architecture for synthetic sensor data generation. In Proceedings of the International Conference on Pervasive Computing and Communications Workshops (PerCom Workshops), Kona, HI, USA, 13–17 March 2017. [Google Scholar]
- Esteban, C.; Hyland, S.; Rätsch, G. Real-valued (medical) time series generation with recurrent conditional gans. arXiv 2017, arXiv:1706.02633. [Google Scholar]
- Yoon, J.; Jarrett, D.; Schaar, M. Time-series Generative Adversarial Networks. Adv. Neural Inf. Process. Syst. 2019, 32, 5508–5518. [Google Scholar]
- Nabati, M.; Navidan, H.; Shahbazian, R.; Ghorashi, S.A.; Windridge, D. Using synthetic data to enhance the accuracy of fingerprint-based localization: A deep learning approach. IEEE Sens. Lett. 2020, 4, 1–4. [Google Scholar] [CrossRef]
- Minchala, L.I.; Anthony, J.V.; Jonathan, M.B.; Fabian, A.S.; Andres, V.R. Low Cost Lower Limb Exoskeleton for Assisting Gait Rehabilitation: Design and Evaluation. In Proceedings of the 2019 3rd International Conference on Automation, Control and Robots, Hlavni Mesto Praha, Czech Republic, 11–13 October 2019. [Google Scholar]
- Joonbum, B.; Masayoshi, T. A tele-monitoring system for gait rehabilitation with an inertial measurement unit and a shoe-type ground reaction force sensor. Mechatronics 2013, 23, 646–651. [Google Scholar]
- Kawamoto, H.; Hayashi, T.; Sakurai, T.; Eguchi, K.; Sankai, Y. Development of single leg version of hal for hemiplegia. In Proceedings of the 2009 Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Minneapolis, MN, USA, 3–6 September 2009. [Google Scholar]
- Kang, I.; Kunapuli, P.; Young, A.J. Real-time neural network-based gait phase estimation using a robotic hip exoskeleton. IEEE Trans. Med. Robot. Bionics 2019, 2, 28–37. [Google Scholar] [CrossRef]
- Lu, J.L.; Wang, A.H.; MA, Z.X. Adaptive Research of Lower Limb Rehabilitation Robot Based on Human Gait. In Proceedings of the International Conference on Advanced Mechatronic Systems (ICAMechS), Hanoi, Vietnam, 10–13 December 2020. [Google Scholar]
- Thongsook, A.; Nunthawarasilp, T.; Kraypet, P.; Lim, J.; Ruangpayoongsak, N. C4.5 decision tree against neural network on gait phase recognition for lower limp exoskeleton. In Proceedings of the 2019 First International Symposium on Instrumentation, Control, Artifcial Intelligence, and Robotics (ICA-SYMP), Bangkok, Thailand, 16–18 January 2019. [Google Scholar]
- Pasinetti, S.; Fornaser, A.; Lancini, M.; De Cecco, M.; Sansoni, G. Assisted gait phase estimation through an embedded depth camera using modifed random forest algorithm classifcation. IEEE Sens. J. 2019, 20, 3343–3355. [Google Scholar] [CrossRef]
- Aertbeliën, E.; Schutter, J.D. Learning a Predictive Model of Human Gait for the Control of a Lower-limb Exoskeleton. In Proceedings of the Biomedical Robotics & Biomechatronics, Sao Paulo, Brazil, 12–15 August 2014. [Google Scholar]
- Ren, S.X.; Wang, W.Q.; Hou, Z.G.; Liang, X.; Wang, J.X.; Peng, L. Anthropometric Features Based Gait Pattern Prediction Using Random Forest for Patient-Specific Gait Training. Neural Inf. Process. Lect. Notes Comput. Sci. 2018, 11304, 15–26. [Google Scholar]
- Elsworth, S.; Güttel, S. Time Series Forecasting Using LSTM Networks: A Symbolic Approach. arXiv 2020, arXiv:2003.05672. [Google Scholar]
- Kaushik, S.; Choudhury, A.; Sheron, P.K.; Dasgupta, N.; Natarajan, S.; Pickett, L.A.; Dutt, V. AI in Healthcare: Time-Series Forecasting Using Statistical, Neural, and Ensemble Architectures. Front. Big Data 2020, in press. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chen, Q.L.; Liang, B.F.; Wang, J.H. A Comparative Study of LSTM and Phased LSTM for Gait Prediction. Int. J. Artif. Intell. Appl. 2019, 10, 57–66. [Google Scholar] [CrossRef]
- Tan, H.X.; Aung, N.N.; Tian, J.; Chua, M.C.H.; Yang, Y.O. Time series classification using a modified LSTM approach from accelerometer-based data: A comparative study for gait cycle detection. Gait Posture 2019, 74, 128–134. [Google Scholar] [CrossRef]
- Chiu, C.C.; Sainath, T.N.; Wu, Y.H.; Prabhavalkar, R.; Nguyen, P.; Chen, Z.F.; Kannan, A.; Weiss, R.J.; Rao, K.; Gonina, E.; et al. State-of-the-art Speech Recognition With Sequence-to-Sequence Models. In Proceedings of the IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Calgary, AB, Canada, 15–20 April 2018. [Google Scholar]
- Park, S.H.; Kim, B.D.; Kang, C.M.; Chung, C.C.; Choi, C.C. Sequence-to-Sequence Prediction of Vehicle Trajectory via LSTM Encoder-Decoder Architecture. In Proceedings of the IEEE Intelligent Vehicles Symposium (IV), Changshu, China, 26–30 June 2018. [Google Scholar]
- Ahmadi, S. Attention-Based Encoder-Decoder Networks for Spelling and Grammatical Error Correction. Master’s Thesis, University of Paris Descartes, Paris, France, 21 September 2018. [Google Scholar]
- Nie, Y.P.; Han, Y.; Huang, J.M.; Jiao, B.; Li, A.P. Attention-based encoder-decoder model for answer selection in question answering. Front. Inf. Technol. Electron. Eng. 2017, 18, 535–544. [Google Scholar] [CrossRef]
- Hu, J.; Zheng, W.D. Multistage attention network for multivariate time series prediction. Neurocomputing 2020, 383, 122–137. [Google Scholar] [CrossRef]
- Zi, W.J.; Xiong, W.; Chen, H.; Chen, L. TAGCN: Station-level demand prediction for bike-sharing system via a temporal attention graph convolution network. Inf. Sci. 2021, 561, 274–285. [Google Scholar] [CrossRef]
- Li, Y.; Sam Ge, S.Z.; Yang, C.G. Learning impedance control for physical robot–environment interaction. Int. J. Control 2012, 85, 182–193. [Google Scholar] [CrossRef]
- Hu, N.N.; Wang, A.H.; Wu, Y.H. Robust adaptive PD-like control of lower limb rehabilitation robot based on human movement data. PeerJ Comput. Sci. 2021, 7, e394. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.; Li, Z.K.; Chen, Y.G.; Liao, W.D.; Wang, A.H. Human Gait Prediction for Lower Limb Rehabilitation Exoskeleton Using Gated Recurrent Units. In (RiTA 2020) Lecture Notes in Mechanical Engineering; Chew, E., Anwar, P.P., Majeed, A., Liu, P.C., Platts, J., Myung, H., Kim, J., Kim, J.H., Eds.; Springer: Singapore, 2021. [Google Scholar]
- NOKOV. Beijing NOKOV Science & Technology. Available online: https://nokov.com/motion-capture-movement-analysis.html (accessed on 3 August 2019).



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Layer (Type) | Output Shape | # Parameters |
|---|---|---|
| lstm (LSTM) | (None, 1, 64) | 17,664 |
| lstm_1 (LSTM) | (None, 32) | 12,416 |
| dense (Dense) | (None, 1) | 33 |
| Dataset | Subject | # Real Data | # Augmented Data | # Features | Target Value |
|---|---|---|---|---|---|
| Hip joint | Subject 1 | 448 | 1776 | 4 | Hip joint angle |
| Subject 2 | 429 | 1700 | 4 | Hip joint angle | |
| Subject 3 | 394 | 1558 | 4 | Hip joint angle | |
| Subject 4 | 606 | 2408 | 4 | Hip joint angle | |
| Subject 5 | 288 | 1136 | 4 | Hip joint angle | |
| Knee joint | Subject 1 | 448 | 1776 | 6 | Knee joint angle |
| Subject 2 | 429 | 1700 | 6 | Knee joint angle | |
| Subject 3 | 394 | 1558 | 6 | Knee joint angle | |
| Subject 4 | 606 | 2408 | 6 | Knee joint angle | |
| Subject 5 | 288 | 1136 | 6 | Knee joint angle |
| Model | Dataset | Hip Joint Angle | Knee Joint Angle | ||
|---|---|---|---|---|---|
| RMSE | MAE | RMSE | MAE | ||
| LSTM | Subject 1 | 0.0620 | 0.0430 | 0.0190 | 0.0160 |
| Subject 2 | 0.1700 | 0.1530 | 0.0530 | 0.0360 | |
| Subject 3 | 0.2700 | 0.2090 | 0.0790 | 0.0570 | |
| Subject 4 | 0.0800 | 0.0660 | 0.1230 | 0.1020 | |
| Subject 5 | 0.1380 | 0.1100 | 0.2650 | 0.2390 | |
| Attention-based | Subject 1 | 0.0129 | 0.0112 | 0.0116 | 0.0101 |
| Subject 2 | 0.0031 | 0.0027 | 0.0074 | 0.0069 | |
| Subject 3 | 0.0083 | 0.0066 | 0.0280 | 0.0221 | |
| Subject 4 | 0.0056 | 0.0039 | 0.0069 | 0.0051 | |
| Subject 5 | 0.0062 | 0.0050 | 0.0270 | 0.0236 | |
| Model | Dataset | Hip Joint Angle | Knee Joint Angle | ||
|---|---|---|---|---|---|
| RMSE | MAE | RMSE | MAE | ||
| LSTM | Subject 1 | 0.0620 | 0.0430 | 0.0190 | 0.0160 |
| Subject 2 | 0.1700 | 0.1530 | 0.0530 | 0.0360 | |
| Subject 3 | 0.2700 | 0.2090 | 0.0790 | 0.0570 | |
| Subject 4 | 0.0360 | 0.0260 | 0.0560 | 0.0270 | |
| Subject 5 | 0.0780 | 0.0640 | 0.0670 | 0.0460 | |
| Attention-based | Subject 1 | 0.0035 | 0.0032 | 0.0092 | 0.0084 |
| Subject 2 | 0.0039 | 0.0033 | 0.0074 | 0.0069 | |
| Subject 3 | 0.0067 | 0.0060 | 0.0320 | 0.0284 | |
| Subject 4 | 0.0131 | 0.0051 | 0.0218 | 0.0079 | |
| Subject 5 | 0.0049 | 0.0037 | 0.0242 | 0.0570 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Li, Z.; Wang, X.; Yu, H.; Liao, W.; Arifoglu, D. Human Gait Data Augmentation and Trajectory Prediction for Lower-Limb Rehabilitation Robot Control Using GANs and Attention Mechanism. Machines 2021, 9, 367. https://doi.org/10.3390/machines9120367
Wang Y, Li Z, Wang X, Yu H, Liao W, Arifoglu D. Human Gait Data Augmentation and Trajectory Prediction for Lower-Limb Rehabilitation Robot Control Using GANs and Attention Mechanism. Machines. 2021; 9(12):367. https://doi.org/10.3390/machines9120367
Chicago/Turabian StyleWang, Yan, Zhikang Li, Xin Wang, Hongnian Yu, Wudai Liao, and Damla Arifoglu. 2021. "Human Gait Data Augmentation and Trajectory Prediction for Lower-Limb Rehabilitation Robot Control Using GANs and Attention Mechanism" Machines 9, no. 12: 367. https://doi.org/10.3390/machines9120367
APA StyleWang, Y., Li, Z., Wang, X., Yu, H., Liao, W., & Arifoglu, D. (2021). Human Gait Data Augmentation and Trajectory Prediction for Lower-Limb Rehabilitation Robot Control Using GANs and Attention Mechanism. Machines, 9(12), 367. https://doi.org/10.3390/machines9120367