Unmanned Ground Vehicle Modelling in Gazebo/ROS-Based Environments



Abstract
1. Introduction
2. Materials and Methods
Wheeled Robot Modelling in a Gazebo-Based Environment
- simple mechanical structure that facilitates kinematic modelling;
- low manufacturing costs;
- facilitates calculations of safe space (free of obstacles) by using the biggest dimension of the rigid platform as “robot radio”.
- difficulty moving on uneven surfaces;
- the loss of contact of one of the active wheels with the ground can change the orientation sharply;
- sensitivity to the sliding of the wheels, due to slippery floors, external or internal forces.
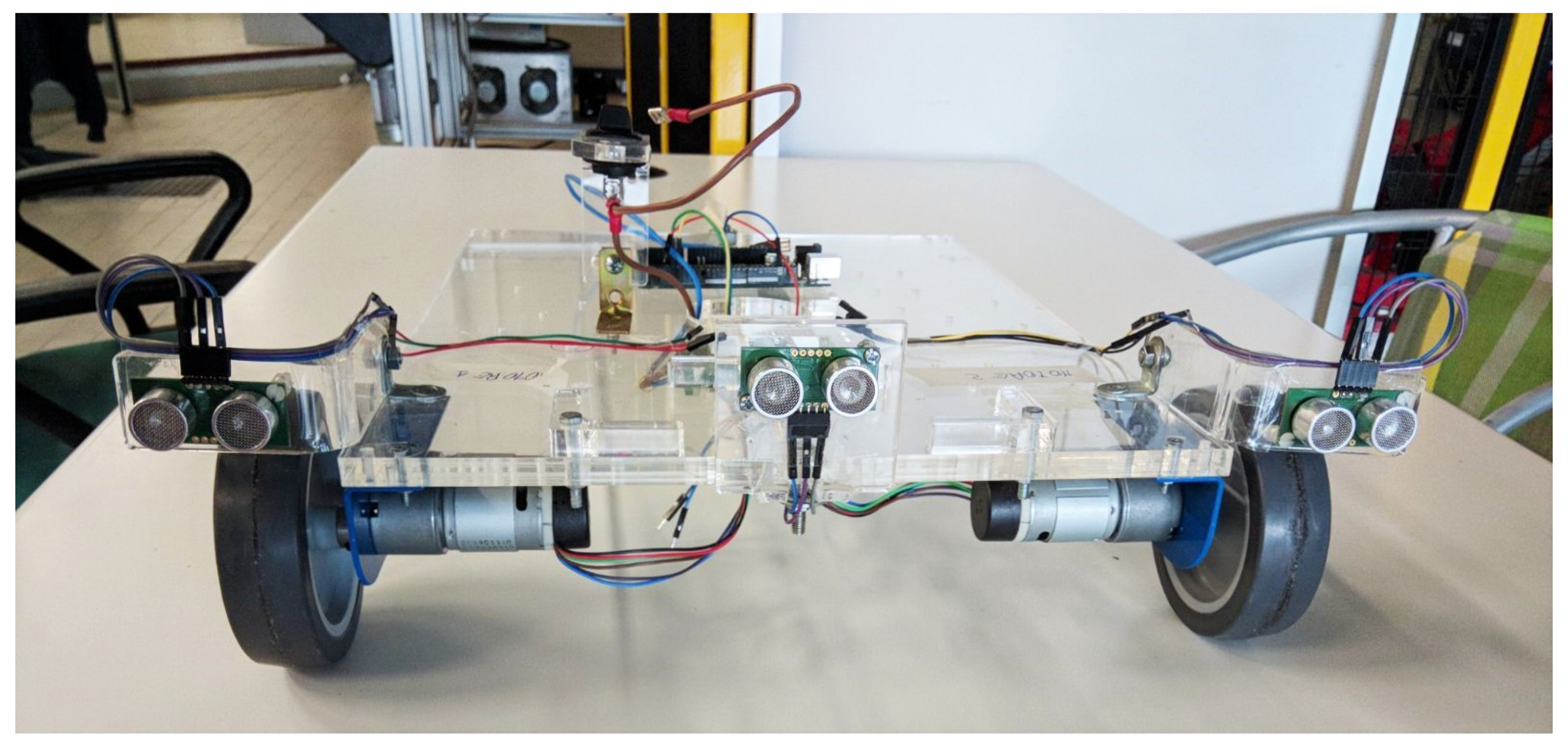
- The front wheels are equidistant in the common axis of rotation, without lateral variations, while the castor, located in the rear, provides a pure rotation contact between it and the ground without causing slips in the vehicle when moving.
- The mechanical design of the two front wheels as “fixed” confers a speed restriction in the driving direction (only forward and backward), while the castor wheel has free movement.
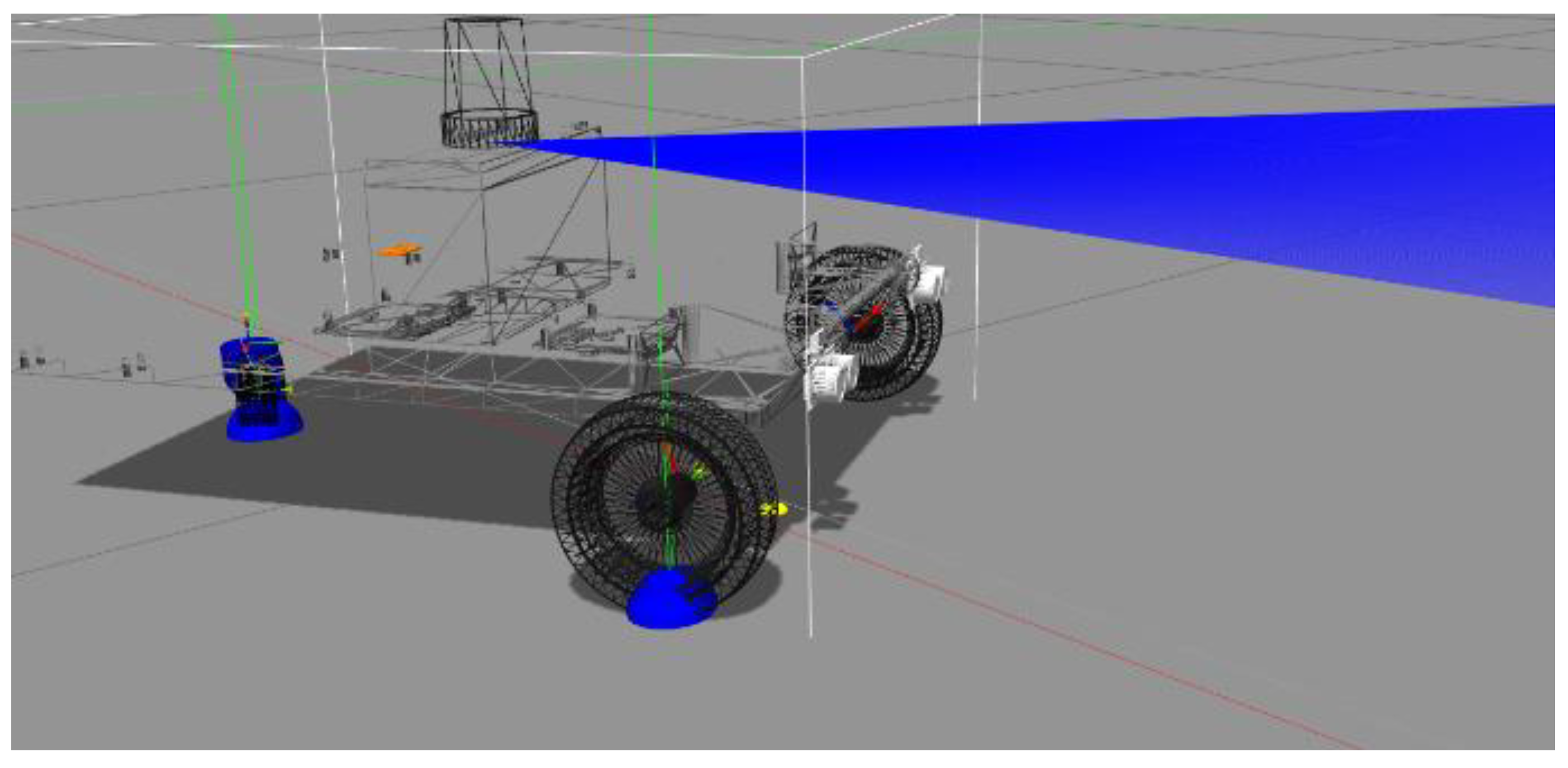
- Standard wheel: two degrees of freedom, rotation around the wheel axle (usually motorized) and the point of contact;
- Rotating wheel: two degrees of freedom, rotation around a controllable displaced joint;
- Swedish wheel (Swedish): three degrees of freedom, rotation around the wheel axis (usually monitored), around the rollers or bearings, and around the point of contact;
- Ball or spherical wheel: technically difficult realization.
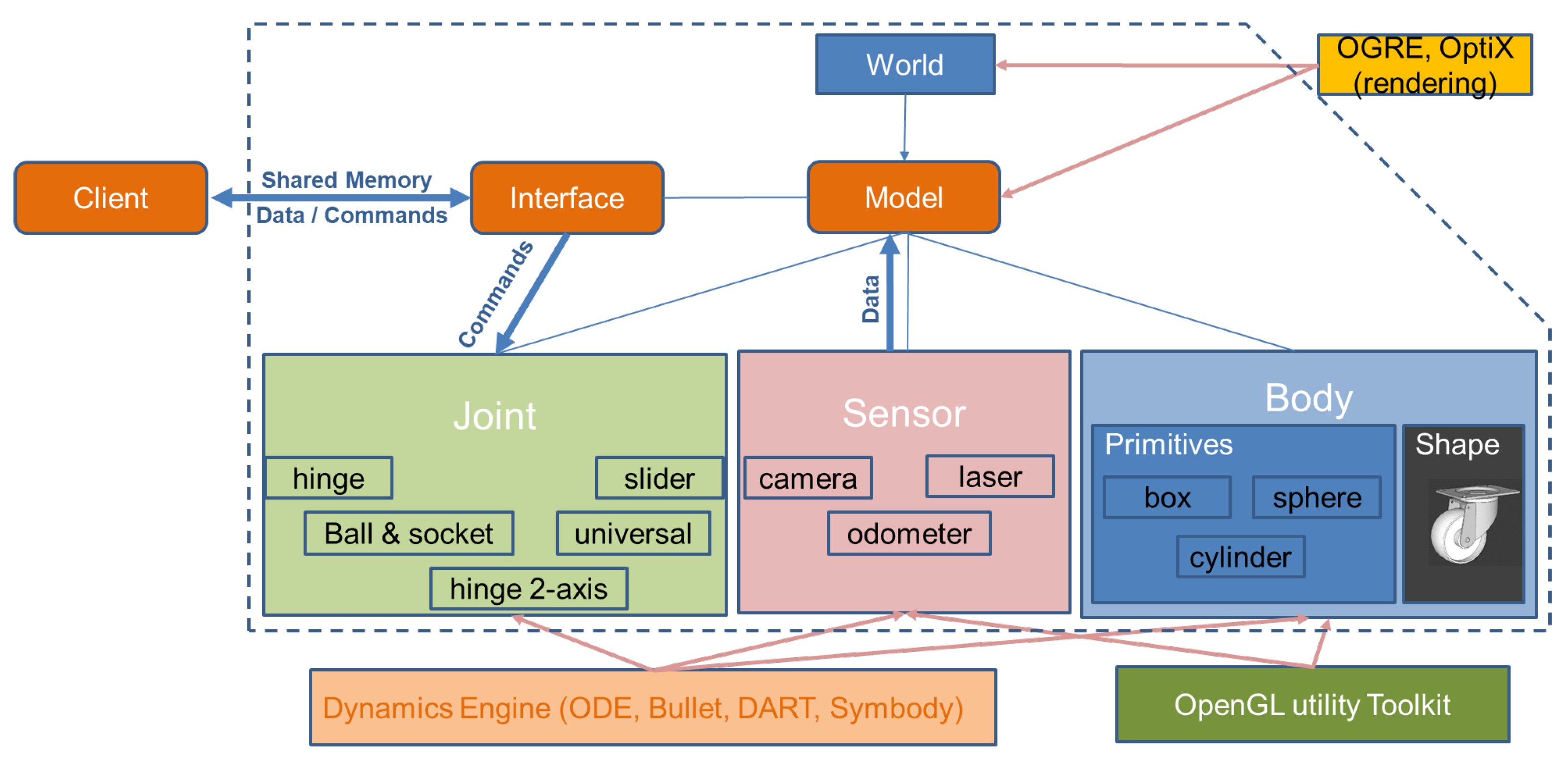
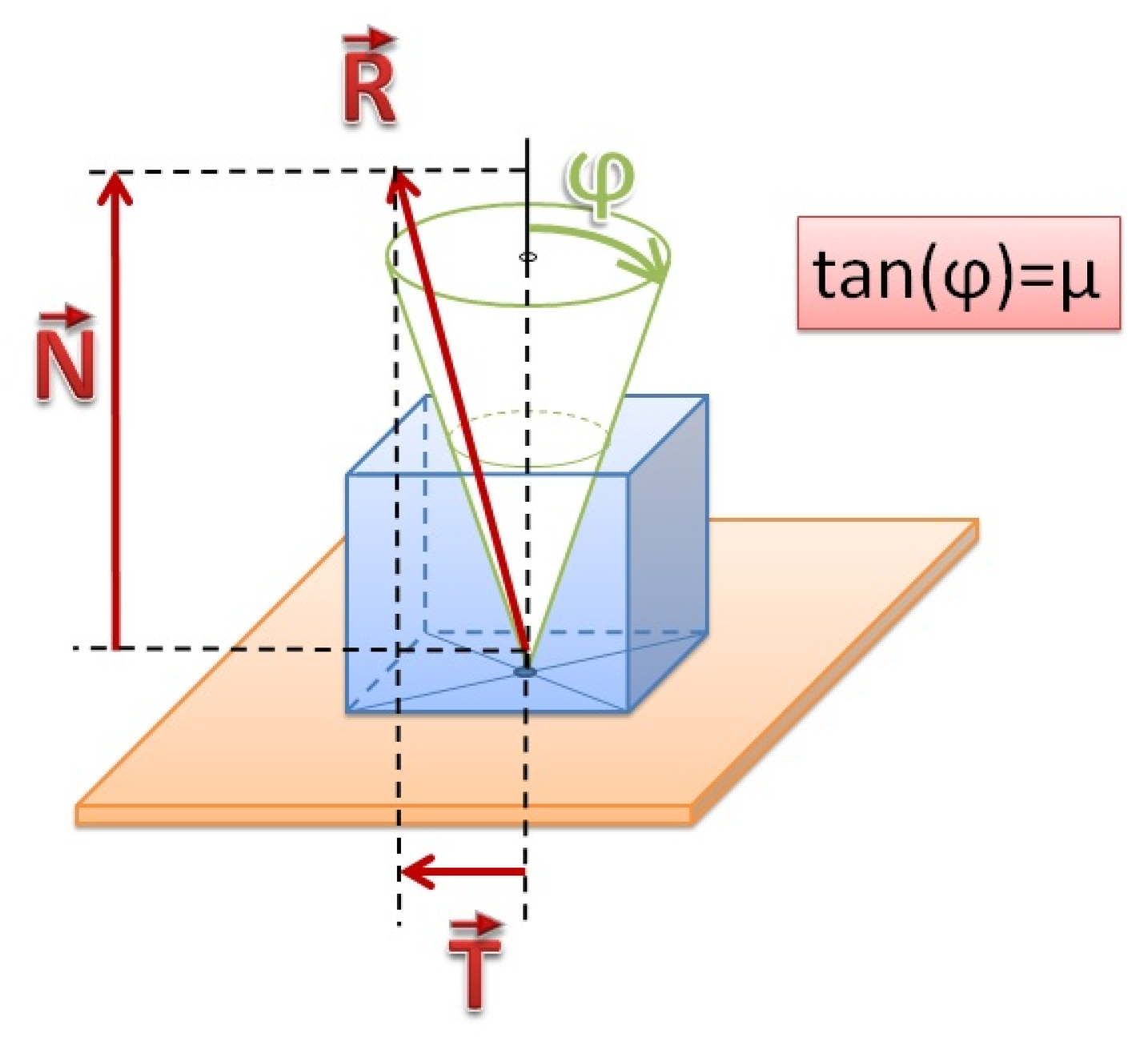
- “mu” is the Coulomb friction coefficient for the principal contact directions or the first friction direction;
- “mu2” is the friction coefficient for the second friction direction (perpendicular to the first friction direction).
- the two contact stiffness and damping for rigid body contacts; those are defined as Gazebo’s links parameters, “kp” and “kd”;
- the joint stop constraint force mixing (cfm) and error reduction parameter (erp) used to simulate damping.
- void dSpaceCollide (dSpaceID space, void ∗data, dNearCallback ∗callback);
- int dCollide (dGeomID o1, dGeomID o2, int flags, dContactGeom ∗contact, int skip).
- “mu” is the force limit to be chosen appropriately for the simulation, which means that the maximum friction (tangential) force that can be present at a contact, in either of the tangential friction directions. This is rather non-physical because it is independent from the normal force, but it is the computationally cheapest option.
- The friction cone is approximated by a friction pyramid aligned with the first and second friction directions. First, ODE computes the normal forces assuming that all the contacts are frictionless; then, it computes the maximum limits for the friction (tangential) forces from and then proceeds to solve for the entire system with these fixed limits.
- v_f1 = J_f1 ∗ v
- v_f2 = J_f2 ∗ v
- v = sqrt(v_f1^2 + v_f2^2);
- if (v < eps)
- lo_act_f1 = 0;
- hi_act_f1 = 0;
- lo_act_f2 = 0;
- hi_act_f2 = 0;
- else
- hi_act_f1 = abs(v_f1) / v ∗ (mu ∗ lambda_n);
- lo_act_f1 = − lo_act_f1;
- hi_act_f2 = abs(v_f2) / v ∗ (mu ∗ lambda_n);
- lo_act_f2 = − lo_act_f2.
- end
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Arkin, R.C.; Arkin, R.C. Behavior-Based Robotics; MIT Press: Cambridge, MA, USA, 1998. [Google Scholar]
- Prassler, E.; Nilson, K. 1001 robot architectures for 1001 robots [Industrial Activities]. IEEE Robot. Autom. Mag. 2009, 16, 113. [Google Scholar] [CrossRef]
- Flynn, A.M. Redundant Sensors for Mobile Robot Navigation; Report No. AI-TR-859; MIT Artificial Intelligence Laboratory: Cambridge, MA, USA, 1985. [Google Scholar]
- Borenstein, J.; Everett, H.R.; Feng, L. Navigating Mobile Robots: Systems and Techniques; AK Peters: Wellesley, MA, USA, 1996; pp. 1–225. [Google Scholar]
- Koenig, N.; Hsu, J.; Dolha, M.; Howard, A. Gazebo. Retrieved 2012, 3, 2012. [Google Scholar]
- Hsu, J.M.; Peters, S.C. Extending open dynamics engine for the DARPA virtual robotics challenge. In International Conference on Simulation, Modeling, and Programming for Autonomous Robots; Springer: Cham, Witzerland, 2014; pp. 37–48. [Google Scholar]
- Koenig, N.; Howard, A. Design and use paradigms for Gazebo, an open-source multi-robot simulator. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Sendai, Japan, 28 September–2 October 2004; pp. 2149–2154. [Google Scholar]
- Inoue, K.; Otsuka, K.; Sugimoto, M.; Murakami, N. Estimation of place of tractor and adaptive control method of autonomous tractor using INS and GPS. In Proceedings of the International Workshop on Robotics and Automated Machinery for Bio-Productions, Valencia, Spain, 21–24 September 1997; pp. 27–36. [Google Scholar]
- Lyshevski, S.E.; Nazarov, A. Lateral maneuvering of ground vehicles: Modeling and control. In Proceedings of the 2000 American Control Conference, Chicago, IL, USA, 28–30 June 2000; Volume 1, pp. 110–114. [Google Scholar]
- O’Connor, M.; Bell, T.; Elkaim, G.; Parkinson, B. Automatic steering of farm vehicles using GPS. Precis. Agric. 1996, 3, 767–777. [Google Scholar]
- De Wit, C.C.; Siciliano, B.; Bastin, G. Theory of Robot Control; Springer-Verlag: London, UK, 1996. [Google Scholar]
- Samson, C.; Ait-Abderrahim, K. Feedback control of a nonholonomic wheeled cart in cartesian space. In Proceedings of the 1991 IEEE International Conference on Robotics and Automation, Sacramento, CA, USA, 9–11 April 1991; pp. 1136–1141. [Google Scholar]
- Muir, P.F.; Neuman, C.P. Kinematic modeling of wheeled mobile robots. J. Robot. Syst. 1987, 4, 281–340. [Google Scholar] [CrossRef]
- Campion, G.; Bastin, G.; Dandrea-Novel, B. Structural properties and classification of kinematic and dynamic models of wheeled mobile robots. IEEE Trans. Robot. Autom. 1996, 12, 47–62. [Google Scholar] [CrossRef]
- Alexander, R.M. Optimization and gaits in the locomotion of vertebrates. Physiol. Rev. 1989, 69, 1199–1227. [Google Scholar] [CrossRef]
- Chen, X.; Chen, Y.Q.; Chase, J.G. Mobile Robots: State of the Art in Land, Sea, Air, Collaborative Missions; InTechm: Manhattan, NY, USA, 2009. [Google Scholar]
- Klancar, G.; Zdesar, A.; Blazic, S.; Skrjanc, I. Wheeled Mobile Robotics: From Fundamentals towards Autonomous Systems; Butterworth-Heinemann: Oxford, UK, 2017. [Google Scholar]
- Litman, T. Autonomous Vehicle Implementation Predictions; Victoria Transport Policy Institute: Victoria, BC, USA, 2017. [Google Scholar]
- Dasic, P. Comparative analysis of different regression models of the surface roughness in finishing turning of hardened steel with mixed ceramic cutting tools. J. Res. Dev. Mech. Ind. 2013, 5, 101–180. [Google Scholar]
- Cammarata, A.; Caliò, I.; Greco, A.; Lacagnina, M.; Fichera, G. Dynamic stiffness model of spherical parallel robots. J. Sound Vib. 2016, 384, 312–324. [Google Scholar] [CrossRef]
- Callegari, M.; Cammarata, A.; Gabrielli, A.; Sinatra, R. Kinematics and dynamics of a 3-CRU spherical parallel robot. In Proceedings of the ASME 2007 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Las Vegas, NV, USA, 4–7 September 2007; pp. 933–941. [Google Scholar]
- Cammarata, A.; Lacagnina, M.; Sinatra, R. Dynamic simulations of an airplane-shaped underwater towed vehicle marine. In Proceedings of the 5th International Conference on Computational Methods in Marine Engineering, MARINE, Hamburg, Germany, 29–31 May 2013. [Google Scholar]
- Sequenzia, G.; Fatuzzo, G.; Oliveri, S.M.; Barbagallo, R. Interactive re-design of a novel variable geometry bicycle saddle to prevent neurological pathologies. Int. J. Interact. Des. Manuf. 2016, 10, 165–172. [Google Scholar] [CrossRef]
- Barbagallo, R.; Sequenzia, G.; Cammarata, A.; Oliveri, S.M.; Fatuzzo, G. Redesign and multibody simulation of a motorcycle rear suspension with eccentric mechanism. Int. J. Interact. Des. Manuf. 2018, 12, 517–524. [Google Scholar] [CrossRef]
- Barbagallo, R.; Sequenzia, G.; Oliveri, S.M.; Cammarata, A. Dynamics of a high-performance motorcycle by an advanced multibody/control co-simulation. Proc. Inst. Mech. Eng. Part K J. Multi–Body Dyn. 2016, 230, 207–221. [Google Scholar] [CrossRef]
- Guida, D.; Pappalardo, C.M. Control Design of an Active Suspension System for a Quarter–Car Model with Hysteresis. J. Vib. Eng. Technol. 2015, 3, 277–299. [Google Scholar]
- Barbagallo, R.; Sequenzia, G.; Cammarata, A.; Oliveri, S.M. An integrated approach to design an innovative motorcycle rear suspension with eccentric mechanism. In Advances on Mechanics, Design Engineering and Manufacturing; Springer: Dordrecht, The Netherlands, 2017; pp. 609–619. [Google Scholar]
- Calì, M.; Oliveri, S.M.; Sequenzia, G. Geometric modeling and modal stress formulation for flexible multi-body dynamic analysis of crankshaft. In Proceedings of the 25th Conference and Exposition on Structural Dynamics, IMAC-XXV, Orlando, FL, USA, 19–22 February 2007; pp. 1–9. [Google Scholar]
- De Simone, M.C.; Russo, S.; Rivera, Z.B.; Guida, D. Multibody Model of a UAV in Presence of Wind Fields. In Proceedings of the 2017 International Conference on Control, Artificial Intelligence, Robotics and Optimization, Prague, Czech Republic, 20–22 May 2017; pp. 83–88. [Google Scholar] [CrossRef]
- De Simone, M.C.; Guida, D. On the development of a low-cost device for retrofitting tracked vehicles for autonomous navigation. In Proceedings of the AIMETA 2017—23rd Conference of the Italian Association of Theoretical and Applied Mechanics, Salerno, Italy, 4–7 September 2017; Volume 4, pp. 71–82. [Google Scholar]
- Iannone, V.; De Simone, M.C.; Guida, D. Modelling of a DC Gear Motor for Feed–Forward Control Law Design for Unmanned Ground Vehicles. Actuators 2019, in press. [Google Scholar]
- Villecco, F. On the Evaluation of Errors in the Virtual Design of Mechanical Systems. Machines 2018, 6, 36. [Google Scholar] [CrossRef]
- Milosavljevic, B.; Pesic, R.; Dasic, P. Binary Logistic Regression Modeling of Idle CO Emissions in order to Estimate Predictors Influences in Old Vehicle Park. Math. Probl. Eng. 2015, 2015, 463158. [Google Scholar] [CrossRef]
- Pappalardo, C.M.; Guida, D. On the Computational Methods for the Dynamic Analysis of Rigid Multibody Mechanical Systems. Machines 2018, 6, 20. [Google Scholar] [CrossRef]
- Serifi, V.; Dasic, P.; Jecmenica, R.; Labovic, D. Functional and Information Modeling of Production using IDEF Methods. Strojniski Vestnik/J. Mech. Eng. 2009, 55, 131–140. [Google Scholar]
- Dasic, P.; Franek, F.; Assenova, E.; Radovanovic, M. International Standardization and Organizations in the Field of Tribology. Ind. Lubr. Tribol. 2003, 55, 287–291. [Google Scholar] [CrossRef]
- Dasic, P. Determination of Reliability of Ceramic Cutting Tools on the basis of Comparative Analysis of Different Functions Distribution. Int. J. Qual. Reliab. Manag. 2001, 18, 431–443. [Google Scholar]
- De Simone, M.C.; Guida, D. Dry friction influence on structure dynamics. In Proceedings of the COMPDYN 2015—5th ECCOMAS Thematic Conference on Computational Methods in Structural Dynamics and Earthquake Engineering, Crete Island, Greece, 25–27 May 2015; pp. 4483–4491. [Google Scholar]
- Zhai, Y.; Liu, L.; Lu, W.; Li, Y.; Yang, S.; Villecco, F. The application of disturbance observer to propulsion control of sub-mini underwater robot. In Computational Science and Its Applications–ICCSA 2010; Springer: Berlin/Heidelberg, Germany, 2010; pp. 590–598. [Google Scholar]
- Dasic, P.; Dasic, J.; Crvenkovic, B. Applications of Access Control as a Service for Software Security. Int. J. Ind. Eng. Manag. 2016, 7, 111–116. [Google Scholar]
- Villecco, F.; Pellegrino, A. Entropic measure of epistemic uncertainties in multibody system models by axiomatic design. Entropy 2017, 19, 291. [Google Scholar] [CrossRef]
- Formato, A.; Ianniello, D.; Villecco, F.; Lenza, T.L.L.; Guida, D. Design optimization of the plough working surface by computerized mathematical model. Emirates J. Food Agric. 2017, 29, 36–44. [Google Scholar] [CrossRef]
- Sena, P.; D’Amore, M.; Pappalardo, M.; Pellegrino, A.; Fiorentino, A.; Villecco, F. Studying the influence of cognitive load on driver’s performances by a Fuzzy analysis of Lane Keeping in a drive simulation. IFAC Proc. Vol. 2013, 46, 151–156. [Google Scholar] [CrossRef]
- De Simone, M.C.; Rivera, Z.B.; Guida, D. Finite element analysis on squeal-noise in railway applications. FME Trans. 2018, 46, 93–100. [Google Scholar] [CrossRef]
- Pappalardo, C.M.; Guida, D. System Identification Algorithm for Computing the Modal Parameters of Linear Mechanical Systems. Machines 2018, 6, 12. [Google Scholar] [CrossRef]
- De Simone, M.C.; Rivera, Z.B.; Guida, D. Obstacle avoidance system for unmanned ground vehicles by using ultrasonic sensors. Machines 2018, 6, 18. [Google Scholar] [CrossRef]
- Pappalardo, C.M.; Guida, D. System Identification and Experimental Modal Analysis of a Frame Structure. Eng. Lett. 2018, 26, 56–68. [Google Scholar]
- Colucci, F.; De Simone, M.C.; Guida, D. TLD Design and Development for Vibration Mitigation in Structures. Lecture Notes in Networks and Systems; Springer: Cham, Switzerland, 2020; Volume 76, pp. 59–72. [Google Scholar]
- De Simone, M.C.; Guida, D. Identification and control of a Unmanned Ground Vehicle by Using Arduino. UPB Sci. Bull. Ser. D Mech. Eng. 2018, 80, 141–154. [Google Scholar]
- Pappalardo, C.M.; Guida, D. Dynamic Analysis of Planar Rigid Multibody Systems Modelled Using Natural Absolute Coordinates. Appl. Comput. Mech. 2018, 12, 73–110. [Google Scholar] [CrossRef]
- Pappalardo, C.M. A Natural Absolute Coordinate Formulation for the Kinematic and Dynamic Analysis of Rigid Multibody Systems. Nonlinear Dyn. 2015, 81, 1841–1869. [Google Scholar] [CrossRef]
- Pappalardo, C.M.; Guida, D. Control of Nonlinear Vibrations using the Adjoint Method. Meccanica 2017, 52, 2503–2526. [Google Scholar] [CrossRef]
- Pappalardo, C.M.; Guida, D. A time-domain system identification numerical procedure for obtaining linear dynamical models of multibody mechanical systems. Arch. Appl. Mech. 2018, 88, 1325–1347. [Google Scholar] [CrossRef]
- Pappalardo, C.M.; Guida, D. Use of the Adjoint Method in the Optimal Control Problem for the Mechanical Vibrations of Nonlinear Systems. Machines 2018, 6, 19. [Google Scholar] [CrossRef]
- Pappalardo, C.M.; Guida, D. On the Lagrange multipliers of the intrinsic constraint equations of rigid multibody mechanical systems. Arch. Appl. Mech. 2018, 88, 419–451. [Google Scholar] [CrossRef]
- Pappalardo, C.M.; Guida, D. Adjoint-based Optimization Procedure for Active Vibration Control of Nonlinear Mechanical Systems. ASME J. Dyn. Syst. Meas. Control 2017, 139, 081010. [Google Scholar] [CrossRef]
- Concilio, A.; De Simone, M.C.; Rivera, Z.B.; Guida, D. A new semi-active suspension system for racing vehicles. FME Trans. 2017, 45, 578–584. [Google Scholar] [CrossRef]
- Cammarata, A.; Sinatra, R. On the elastostatics of spherical parallel machines with curved links. Mech. Mach. Sci. 2015, 33, 347–356. [Google Scholar]
- Cammarata, A.; Lacagnina, M.; Sinatra, R. Closed-form solutions for the inverse kinematics of the Agile Eye with constraint errors on the revolute joint axes. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems, Daejeon, Korea, 9–14 October 2016. [Google Scholar]
- Quatrano, A.; De Simone, M.C.; Rivera, Z.B.; Guida, D. Development and implementation of a control system for a retrofitted CNC machine by using Arduino. FME Trans. 2017, 45, 565–571. [Google Scholar] [CrossRef]
- De Simone, M.C.; Guida, D. Control design for an under-actuated UAV model. FME Trans. 2018, 46, 443–452. [Google Scholar] [CrossRef]
- Cammarata, A.; Angeles, J.; Sinatra, R. Kinetostatic and inertial conditioning of the McGill Schönfliesmotion generator. Adv. Mech. Eng. 2010, 2, 186203. [Google Scholar] [CrossRef]
- Cammarata, A. Unified formulation for the stiffness analysis of spatial mechanisms. Mech. Mach. Theory 2016, 105, 272–284. [Google Scholar] [CrossRef]
- Dasic, P.; Natsis, A.; Petropoulos, G. Models of Reliability for Cutting Tools: Examples in Manufacturing and Agricultural Engineering. Stroj. Vestnik/J. Mech. Eng. 2018, 54, 122–130. [Google Scholar]
- Dasic, P.; Dasic, J.; Crvenkovic, B. Service Models for Cloud Computing: Search as a Service (SaaS). Int. J. Eng. Technol. 2016, 8, 2366–2373. [Google Scholar] [CrossRef]
- Cammarata, A. Optimized design of a large-workspace 2-DOF parallel robot for solar tracking systems. Mech. Mach. Theory 2015, 83, 175–186. [Google Scholar] [CrossRef]
- Zhang, Y.; Li, Z.; Gao, J.; Hong, J.; Villecco, F.; Li, Y. A method for designing assembly tolerance networks of mechanical assemblies. Math. Probl. Eng. 2012, 2012, 513958. [Google Scholar] [CrossRef]
- Cammarata, A. A novel method to determine position and orientation errors in clearance-affected overconstrained mechanisms. Mech. Mach. Theory 2017, 118, 247–264. [Google Scholar] [CrossRef]
- Cammarata, A.; Sequenzia, G.; Oliveri, S.M.; Fatuzzo, G. Modified chain algorithm to study planar compliant mechanisms. Int. J. Interact. Des. Manuf. 2016, 10, 191–201. [Google Scholar] [CrossRef]
- Oliveri, S.M.; Sequenzia, G.; Calì, M. Flexible multibody model of desmodromic timing system. Mech. Based Des. Struct. Mach. 2009, 37, 15–30. [Google Scholar] [CrossRef]
- Ghomshei, M.; Villecco, F.; Porkhial, S.; Pappalardo, M. Complexity in energy policy: A fuzzy logic methodology. In Proceedings of the Sixth International Conference on Fuzzy Systems and Knowledge Discovery, Tianjin, China, 14–16 August 2009; pp. 128–131. [Google Scholar]
- Pappalardo, C.M.; Guida, D. On the use of Two-dimensional Euler Parameters for the Dynamic Simulation of Planar Rigid Multibody Systems. Arch. Appl. Mech. 2017, 87, 1647–1665. [Google Scholar] [CrossRef]
- Ghomshei, M.; Villecco, F. Energy metrics and Sustainability. In Proceedings of the Computational Science and Its Applications–ICCSA 2009, Seoul, Korea, 29 June–2 July 2009; pp. 693–698. [Google Scholar]
- Villecco, F.; Pellegrino, A. Evaluation of Uncertainties in the Design Process of Complex Mechanical Systems. Entropy 2017, 19, 475. [Google Scholar] [CrossRef]
- Sena, P.; Attianese, P.; Pappalardo, M.; Villecco, F. FIDELITY: Fuzzy Inferential Diagnostic Engine for on-LIne supporT to phYsicians. In 4th International Conference on Biomedical Engineering in Vietnam; Springer: Berlin/Heidelberg, Germany, 2013; pp. 396–400. [Google Scholar]
- Pellegrino, A.; Villecco, F. Design optimization of a natural gas substation with intensification of the energy cycle. Math. Probl. Eng. 2010, 2010, 294102. [Google Scholar] [CrossRef]
- Sena, P.; Attianese, P.; Carbone, F.; Pellegrino, A.; Pinto, A.; Villecco, F. A fuzzy model to interpret data of drive performances from patients with sleep deprivation. Comput. Math. Methods Med. 2012, 2012, 868410. [Google Scholar] [CrossRef] [PubMed]
- Furrer, F.; Burri, M.; Achtelik, M.; Siegwart, R. Robot Operating System (ROS): The Complete Reference (Volume 1); Springer International Publishing: Cham, Witzerland, 2016; pp. 595–625. [Google Scholar]
- Foote, T. tf: The transform library. In Proceedings of the 2013 IEEE International Conference on Technologies for Practical Robot Applications (TePRA), Woburn, MA, USA, 22–23 April 2013; pp. 1–6. [Google Scholar]
- Koubâa, A. Robot Operating System (ROS): The Complete Reference; Springer: Berlin, Germany, 2017; Volume 2. [Google Scholar]
- Chitta, S.; Jones, E.G.; Ciocarlie, M.; Hsiao, K. Perception, planning, and execution for mobile manipulation in unstructured environments. IEEE Robot. Autom. Mag. Special Issue Mob. Manip. 2012, 19, 58–71. [Google Scholar] [CrossRef]
- Browning, B.; Tryzelaar, E. Übersim: A multi-robot simulator for robot soccer. In Proceedings of the Second International Joint Conference on Autonomous Agents and Multiagent Systems, Melbourne, VIC, Australia, 14–18 July 2003; pp. 948–949. [Google Scholar]
- Naviglio, D.; Formato, A.; Scaglione, G.; Montesano, D.; Pellegrino, A.; Villecco, F.; Gallo, M. Study of the Grape Cryo–Maceration Process at Different Temperatures. Foods 2018, 7, 107. [Google Scholar] [CrossRef] [PubMed]
- Senatore, A.; Pisaturo, M.; Sharifzadeh, M. Real time identification of automotive dry clutch frictional characteristics using trust region methods. In Proceedings of the 23rd Conference of the Italian Association of Theoretical and Applied Mechanics, Salerno, Italy, 4–7 September 2017; pp. 4–7. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ROS | Robot Operating System | http://www.ros.org/ | For complex mobile and manipulator robots, based on algorithms and actuated sensing. Distributed. |
| MIRA | Middleware for Robotic Application | http://www.mira-project.org/joomla-mira/ | Distributed applications of several different processes (algorithms for certain task) on different machines (either in real time). |
| YARP | Yet Another Robot Platform | http://www.yarp.it/ | Modular, code reuse, transport-neutral interprocess communication based on Ports with different protocols. |
| Urbi | Universal Robotic | https://github.com/urbiforge/urbi | UObject (C++ API) for drivers and algorithms designed and exposed to urbiscript (event-based) used to connect components in an application. Distributed at runtime. |
| LCM | Lightweight communications and marshalling | https://lcm-proj.github.io/index.html | platform- language independent, publisher/subscriber, low-latency message passing systems for real-time robotics research applications |
| Player | Player/Stage Project | http://playerstage.sourceforge.net/index.php?src=index | Fits well for simple, non-articulated mobile platforms. Offers more hardware drivers, provide easy access to sensors and motors on laser-equipped. |
| MOOS | Mission Oriented Operating Suite | http://www.robots.ox.ac.uk/~mobile/MOOS/wiki/pmwiki.php/M | star-shaped topology network. Data as named messages stored in MOOSDB. Other clients can fetch also the history of changes. |
| Portability | Common programming model across language and/or platform boundaries, as well as across distributed end systems |
| Reliability | Can be reused and optimized with confidence over many applications |
| Managing complexity | Low-level programming abstractions can be made more accessible through suitable (possibly object-oriented) libraries. However, programming combinations of these abstractions can be excessively tedious and error-prone. Programming within the context of pattern aware middleware can drastically reduce both chances of introducing errors into the code, and the amount of pain that the programmer must endure when implementing the system (Schmidt et al., 2000). |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rivera, Z.B.; De Simone, M.C.; Guida, D. Unmanned Ground Vehicle Modelling in Gazebo/ROS-Based Environments. Machines 2019, 7, 42. https://doi.org/10.3390/machines7020042
Rivera ZB, De Simone MC, Guida D. Unmanned Ground Vehicle Modelling in Gazebo/ROS-Based Environments. Machines. 2019; 7(2):42. https://doi.org/10.3390/machines7020042
Chicago/Turabian StyleRivera, Zandra B., Marco C. De Simone, and Domenico Guida. 2019. "Unmanned Ground Vehicle Modelling in Gazebo/ROS-Based Environments" Machines 7, no. 2: 42. https://doi.org/10.3390/machines7020042
APA StyleRivera, Z. B., De Simone, M. C., & Guida, D. (2019). Unmanned Ground Vehicle Modelling in Gazebo/ROS-Based Environments. Machines, 7(2), 42. https://doi.org/10.3390/machines7020042