6.3. Construction of the Experimental Platform
At home and abroad, extensive research has been carried out on the demonstration of the mutual substitution or complementarity between wind tunnel experiments and water tunnel/water tank experiments. Both wind tunnel experiments and water tunnel/water tank experiments are based on the theory of fluid dynamics, aiming to study and observe the motion behavior of the tested specimens in fluids (air or water).
David Greenblatt et al. found in the experimental comparison between wind tunnels and water tunnels that in wind tunnel experiments, the airflow is in an oscillatory state, while the test piece remains fixed in the front–rear direction of the laboratory coordinate system; in water tunnel experiments, the water flow remains stable, and the test piece oscillates along the flow direction. The measurement results of the lift coefficient and pitching moment coefficient of the two are highly consistent, but the difference in the static drag limit is slightly larger than that of the dynamic data [
33].
Zhou Jihe et al. focused on the study of the fluid dynamic characteristics of arrows in wind tunnels and water tunnels and finally concluded that the motion laws, pitching moment coefficients, and lift coefficients of arrows are similar [
34].
McCauliffe conducted a series of experiments on the SD7003 airfoil in three different experimental facilities: a low-turbulence wind tunnel, a water tunnel, and a towing tank, and finally obtained similar experimental results [
35].
The Australian Defence Science and Technology Organisation (DSTO) conducted dynamic tests in a water tunnel using a standard dynamic model. The results showed that the measured aerodynamic derivatives were quite acceptable compared with the corresponding wind tunnel data, neither better nor worse [
36].
Atlee et al. conducted force tests on small-scale models in a water tunnel and found that the static force and moment results showed a good correlation with the large-scale wind tunnel test data. The dynamic force and pitching moment results obtained from the water tunnel tests were also in good agreement with the test results of the Netherlands National Aerospace Laboratory (NLR) and the Stanford wind tunnel [
37].
When testing the performance of the Achard water turbine, Andrei-Mugu et al. carried out experiments in the Aerodynamic Wind Tunnel of the Wind Engineering and Industrial Aerodynamics Laboratory of the Department of Hydraulics and Environmental Protection, University of Civil Engineering, Bucharest, and successfully obtained the velocity field of the water turbine and the pressure on the blade surface [
38].
In the research in this paper, relevant experiments are carried out with the help of the ventilation fan aerodynamic performance test wind tunnel. This experimental equipment strictly complies with ISO5801 [
39] and ACMA210 [
40] standards, which can provide a solid guarantee for the accuracy and reliability of the experimental data.
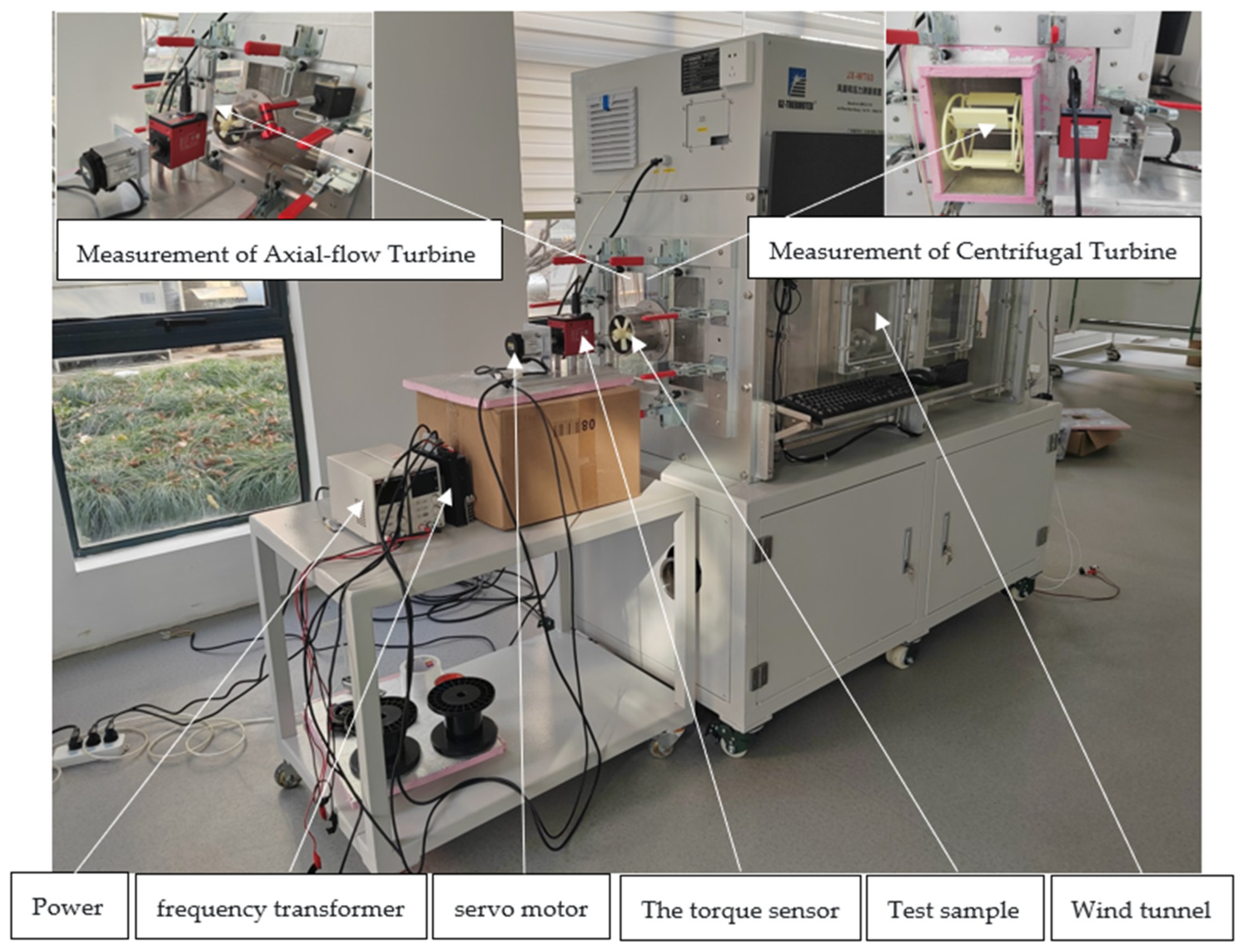
The entire test system is mainly composed of three parts: the wind tunnel platform, the external driving equipment, and the test impeller. The specific composition is shown in
Figure 15 below, and the equipment models are shown in
Table 8. The schematic diagram of the internal structure and operating principle of the wind tunnel is also shown in
Figure 16 below, from which we can clearly understand the airflow path. The airflow enters the wind tunnel cavity under the action of the auxiliary fan. Upon entering the cavity, the airflow first undergoes rectification through the first grille, which ensures uniform distribution of the airflow before entering the nozzle. After the airflow passes through the nozzle, it also passes through the second grille for rectification again. This second grille further ensures that the airflow is in a uniform state before reaching the tested specimen, thereby effectively improving the accuracy of the data measured by the pressure sensor. In addition, the back pressure in the cavity can be flexibly controlled by adjusting the number and diameter of the nozzles and the rotation speed of the auxiliary fan. During the test process, it is necessary to accurately record several key data, including the pressure rises Δp1 of the tested specimen, the pressure difference Δp2, the atmospheric pressure Patm, the dry-bulb temperature T1, the wet-bulb temperature T2, the ambient humidity Hatm, the impeller rotation speed n, and the impeller torque T. These data will provide an important basis for subsequent analysis and research.
This paper divides the experiments on the model prototype into two types: constant rotation speed experiments and constant flow velocity experiments.
(1) Constant rotation speed experiments
In constant rotation speed experiments, the water turbine is driven by a servo motor. The rotation speed of the servo motor is precisely set to 250 rpm, and then the aerodynamic performance of the water turbine is carefully measured by adjusting the back pressure of the wind tunnel. In this process, the stable rotation speed provides good experimental conditions for this paper to study the influence of back pressure on the aerodynamic performance of the water turbine.
(2) Constant flow velocity experiments
Constant flow velocity experiments adopt different operation methods. In this paper, an anemometer is used to measure the flow velocity at the air outlet of the tooling in real time, and a series of adjustment measures are taken to ensure that the flow velocity remains constant. On this basis, the rotation speed of the water turbine is changed, and then the aerodynamic performance of the water turbine at different rotation speeds is measured. This experimental method helps us explore the influence of the change in rotation speed on the aerodynamic performance of the water turbine when the flow velocity remains unchanged.
The specific content of the experimental DOE (Design of Experiments) is shown in
Table 9 below:
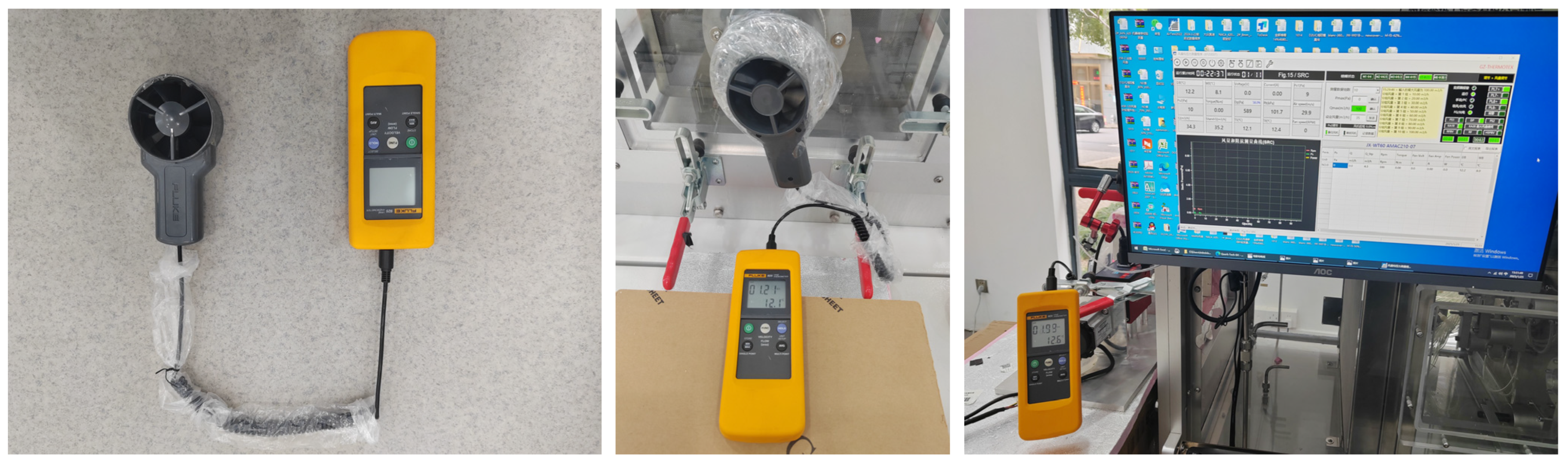
Figure 17 shows the specific process of wind speed measurement. In this measurement, the model 925 anemometer produced by FLUKE Company is selected. To ensure the accuracy of the measurement results, this device is carefully placed at the air outlet of the tooling, so that the airflow can enter the sensor vertically. At the same time, the interface between the sensor and the tooling is sealed to prevent interference from air leakage on the measurement results.
6.4. Verification of Numerical Simulation Results
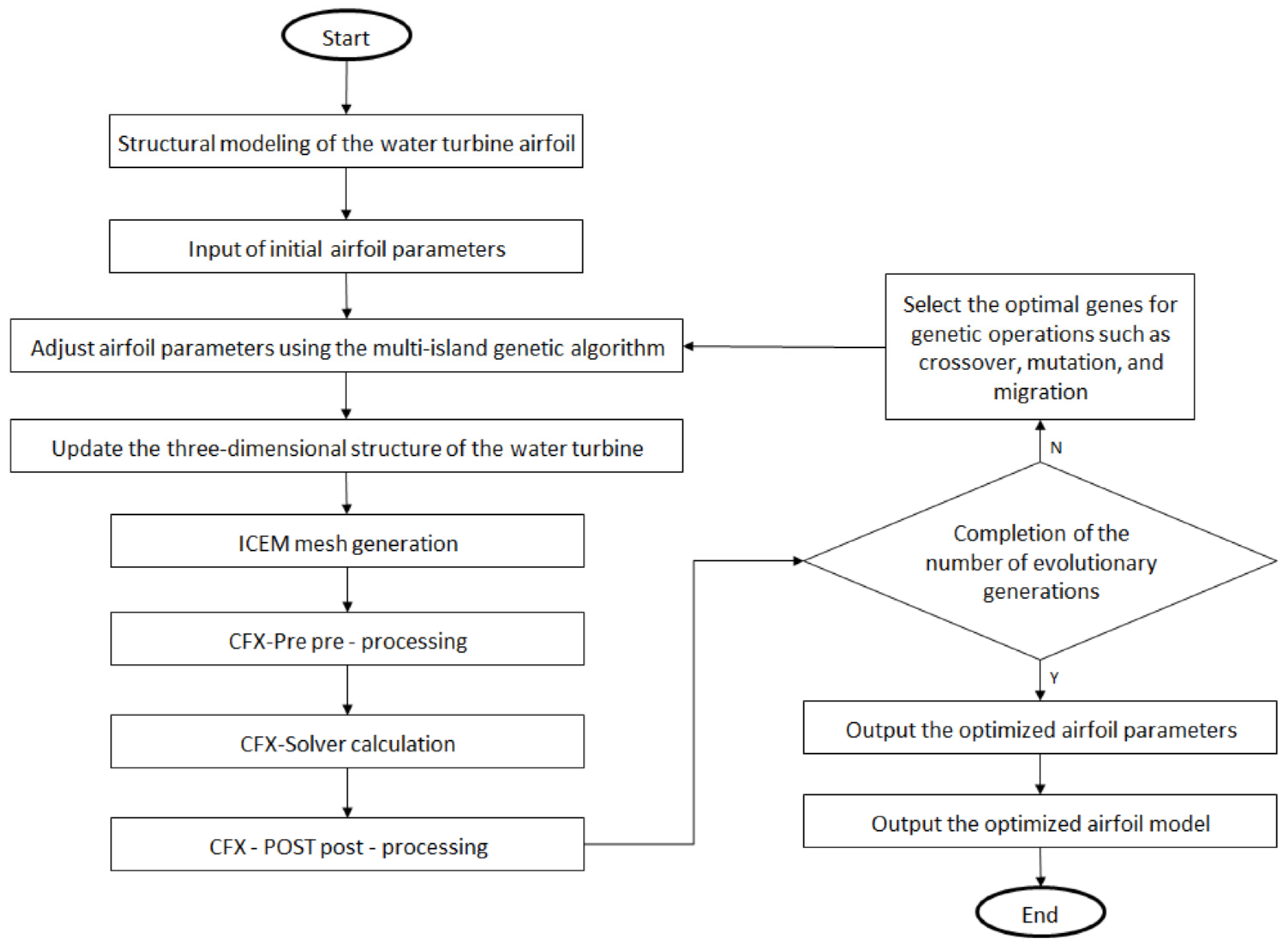
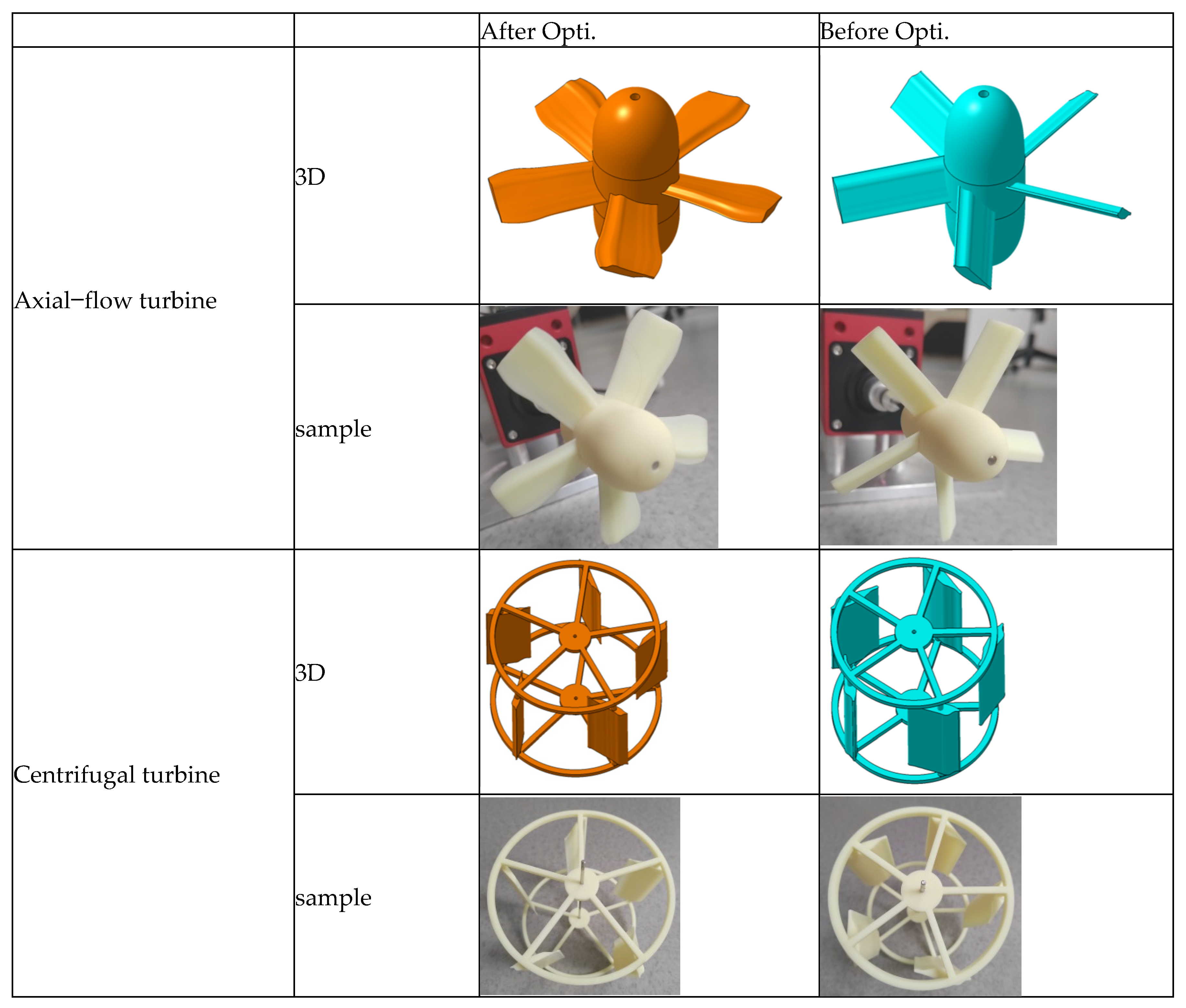
After the multi-island genetic algorithm successfully finds the optimal solution, according to the setting schemes of constant rotation speed and constant flow velocity, this paper conducts steady-state CFD simulation calculations of the full flow passage for the water turbine data corresponding to the optimal solution. The following figures intuitively show the comparison between the simulation calculation results and the experimental test data.
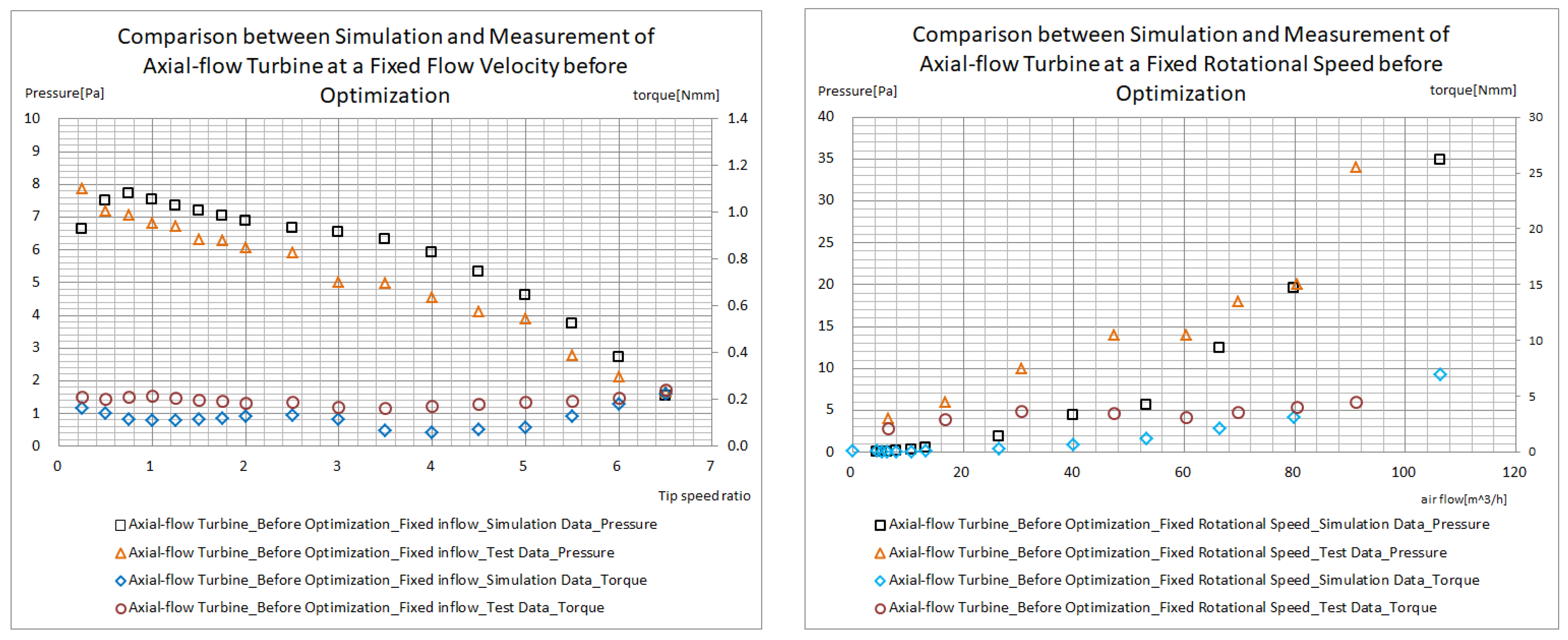
Figure 18 and
Figure 19 detail the comparison between the simulation data and the experimental data of the axial-flow water turbine and the centrifugal water turbine before optimization. In the test of the axial-flow water turbine using the constant flow velocity measurement method, it can be seen from the data comparison results that the experimental results and the simulation data are highly consistent in the changing trends of the water turbine pressure (head) and the water turbine torque. However, the pressure presented by the simulation data is generally higher than the experimental test results. There are mainly two reasons for this phenomenon: firstly, the unevenness around the gap between the impeller and the pipeline leads to leakage; secondly, there is a certain deviation between the 3D printed sample and the theoretical 3D model, and the data of the simulation calculation strictly follow the theoretical values in terms of boundary conditions and dimensional shapes. When the tip speed ratio is 3, both the measured pressure data and the simulated pressure data show an obvious inflection point, and at this time, the pressure difference between the two reaches the maximum, about 1.5 Pa. In the area where the tip speed ratio is greater than 3, the pressure rise slope is large, and the pressure rises rapidly; while in the area where the tip speed ratio is less than 3, the pressure rise slope is small, and the pressure rises slowly. This is mainly because as the tip speed ratio (that is, the rotation speed of the water turbine) increases, the backflow phenomenon at the tip part of the impeller blades decreases, thereby improving the efficiency of the water turbine; when the tip speed ratio is small, the pressure difference between the upstream and downstream of the water turbine is large, and the air backflow phenomenon is significant, resulting in a relatively slow change in the pressure between the upstream and downstream of the water turbine. From the comparison of the torque data, the simulation data and the measured data are also consistent in the changing trend and order of magnitude, but the measured data are generally larger than the simulation data. This is mainly because, during the torque measurement process, the friction coefficients of components such as the bearing, torque sensor, and bearing chamber impact the measurement results, resulting in a larger measured torque value.
When the constant flow velocity measurement method is adopted, the changing trends of the simulation data and the test data in terms of pressure and torque remain consistent. Similar to the situation of the constant flow velocity measurement method, the measured values of the torque are generally larger than the simulated values, and the main reason is also the influence of the friction coefficients of components such as the bearing, the torque sensor, and the bearing chamber, which makes the measured torque value larger. However, as the flow rate increases, the increase in the torque of the water turbine exceeds the increase in torque caused by the friction coefficient. After the flow rate reaches 60 m3/h, the simulation data and the measured data have a high degree of coincidence. Before the flow rate is less than 60 m3/h, the deviation between the measured value and the simulated value of the pressure is large, while after the flow rate reaches 60 m3/h, the coincidence degree of the two is significantly improved. This may be because when the airflow in the wind tunnel cavity is small, the sensor is installed on the wall surface of the cavity, and the influence of the boundary layer leads to deviations in data collection.
When the centrifugal water turbine is measured by the constant flow velocity method, the simulation data and the measured data have a high degree of coincidence in terms of pressure and torque. In the case of the constant rotation speed measurement, the overall coincidence effect of the pressure and torque is good, but there is still a certain deviation in the torque. Specifically, after the wind speed reaches 2 m/s, the coincidence degree of the two is significantly improved; when the wind speed is lower than 2 m/s, the deviation is more obvious, and the lower the wind speed is, the greater the deviation will be.
The main reason for this phenomenon is that the rotation speed of the water turbine is set at a relatively low 250 rpm. When the wind speed is low, the friction factors generated by the bearing friction, the torque sensor, the bearing chamber, etc., account for a relatively large proportion of the measurement and cannot be ignored, increasing the measured value. However, as the wind speed continues to increase, the proportion of these friction factors gradually decreases, making the simulation data and the measured data gradually tend to be consistent.
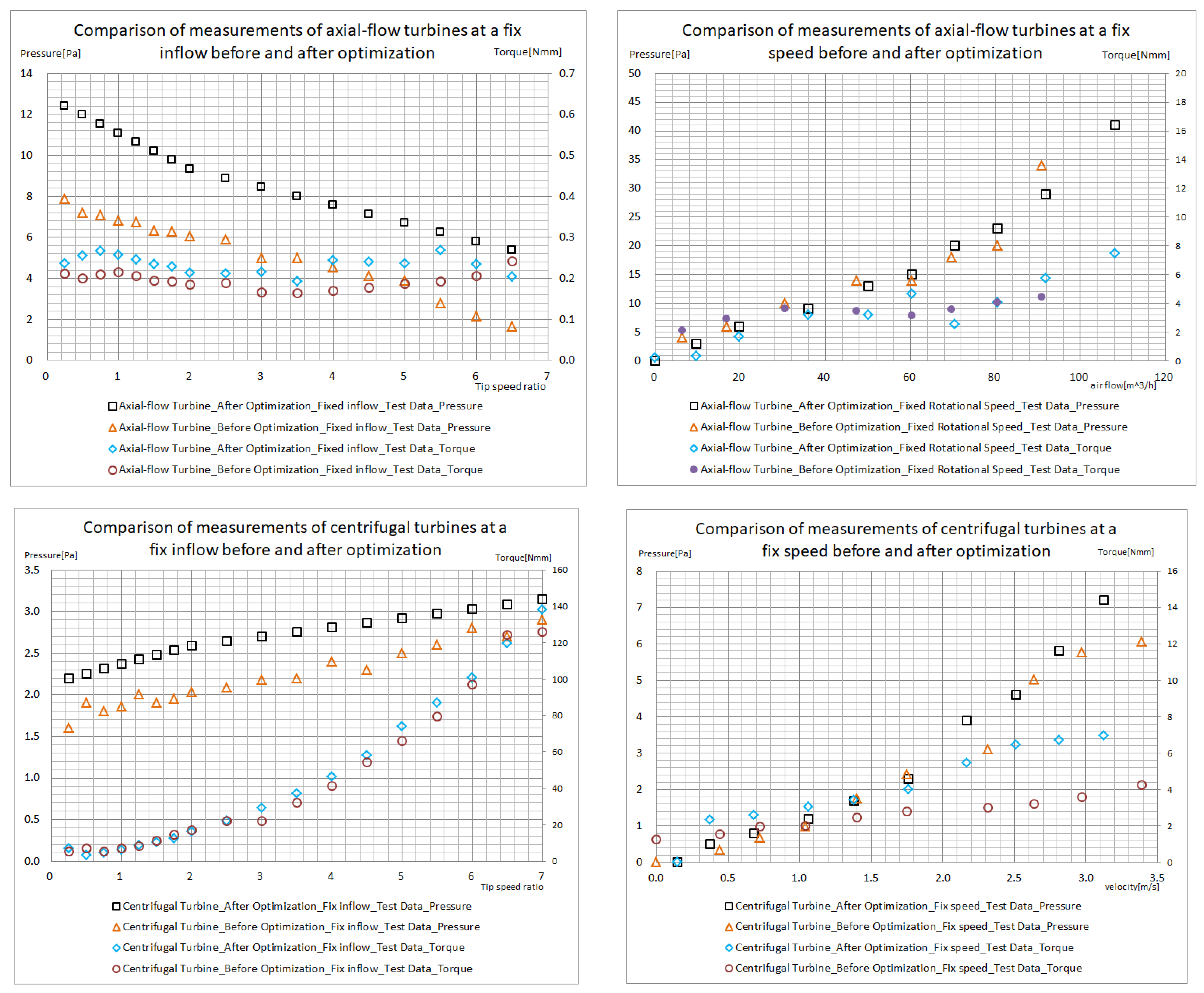
Figure 20 presents the comparison of the measured data of the axial-flow water turbine and the centrifugal water turbine before and after optimization. Through the comparative analysis of the simulation data and the measured data before optimization, we find that the simulation data can provide valuable references for the optimization calculation. Due to the limited length of this article, not all the data are presented.
It is not difficult to see from the measured data before and after optimization that, whether for the axial-flow water turbine or the centrifugal water turbine, the performance data after optimization are significantly better than those before optimization. In the constant flow velocity measurement mode, compared with that before optimization, the pressure of the optimized axial-flow water turbine can be increased by 55% at most, and the torque can be increased by 40% at most; the pressure of the optimized centrifugal water turbine can be increased by 60% at most, compared to that before optimization, and the torque can be increased by 12.5% at most.
When measured at a constant rotation speed, the pressure of the optimized axial-flow water turbine is at most 5 Pa higher than that before optimization, but the increase in torque is not significant. When the flow rate reaches 80 m3/h, the torques before and after optimization tend to be at a similar level. This may be because the axial-flow water turbine before optimization adopted the design of equal chord length and large angle of attack, making its starting torque relatively large. For the centrifugal water turbine, the pressure after optimization is slightly higher than that before optimization, but it is not as obvious as that in the constant flow velocity measurement, with an average increase of only about 0.2 Pa. However, the increase in torque is more significant, which can reach up to 1.6 N·mm at most.
Based on these measured data, this paper can conclude that using the shape function perturbation method and the characteristic parameter description method to establish the water turbine model, and using the multi-island genetic algorithm for optimization calculation, can effectively find a better solution, thus improving the performance of the water turbine.
In this paper, three end faces are selected, as shown in
Figure 21 and
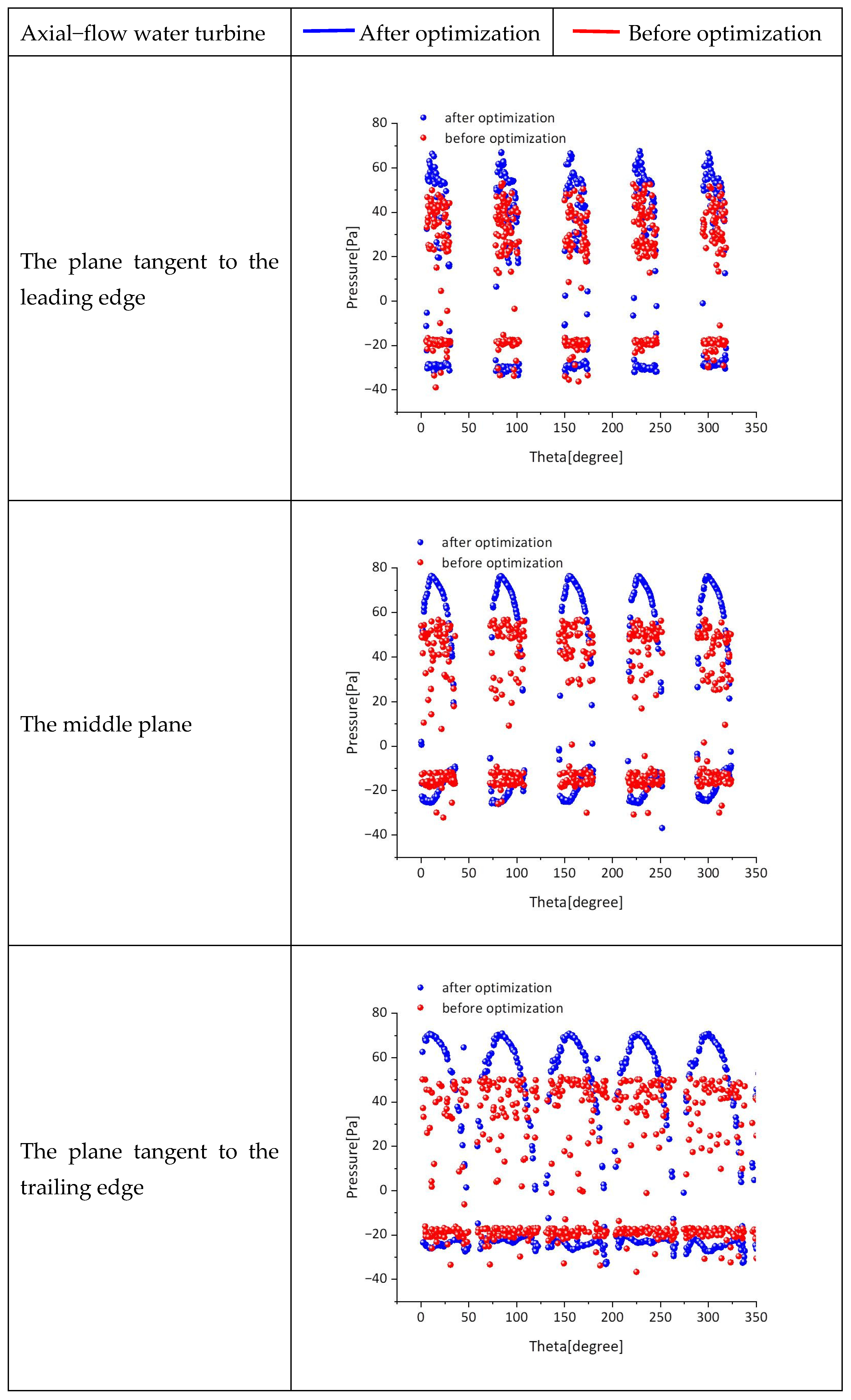
Figure 22 below. They are, respectively, the end face tangent to the leading edge of the axial-flow water turbine, the end face in the middle of the water turbine, and the end face tangent to the trailing edge. The purpose of selecting these three sections is to carefully observe the distribution of the pulsating pressure inside the flow field in terms of space and time during the flow of water.
(1) The plane tangent to the leading edge
On the plane tangent to the leading edge, both the pressure distribution range and the pressure value of the optimized axial-flow water turbine are greater than those before optimization. In the optimized water turbine, there is only a small negative pressure area at the blade tip, while in the water turbine before optimization, there is a negative pressure area in the region of 30–100%. Combined with the pressure distribution curve of this plane in the circumferential direction, this conclusion can also be verified. The positive pressure area of the curve of the optimized water turbine is larger and wider, and the maximum difference in positive pressure can reach 3 Pa; the negative pressure area is significantly smaller than that of the water turbine before optimization, and the maximum difference in negative pressure is 5 Pa. The main reason is that the installation angle of the water turbine before optimization is larger than that after optimization. When the end face is selected at the same position, part of the structure of the water turbine before optimization is exposed outside the end face, which leads to a larger negative pressure area and value compared with those after optimization.
(2) The middle plane
On the middle plane, the overall pressure intensity of the optimized axial-flow water turbine is significantly higher than that before optimization. From the pressure distribution curve of this area, it can be seen that the positive pressure of the optimized water turbine is 4 Pa greater than that before optimization, and the negative pressure is 6 Pa greater. It can be inferred from this that the optimized water turbine does significantly more work in the middle area than before optimization.
(3) The plane tangent to the trailing edge
The situation of the plane tangent to the trailing edge is similar to that of the middle plane. The overall pressure intensity of the optimized axial-flow water turbine is also greater than that before optimization. From the pressure distribution curve of this end face, it is known that the positive pressure of the optimized water turbine is 2 Pa greater than that before optimization, and the negative pressure is 10 Pa greater.
Based on the pressure diagrams of these three end faces, we can preliminarily determine that this optimization algorithm is indeed effective.
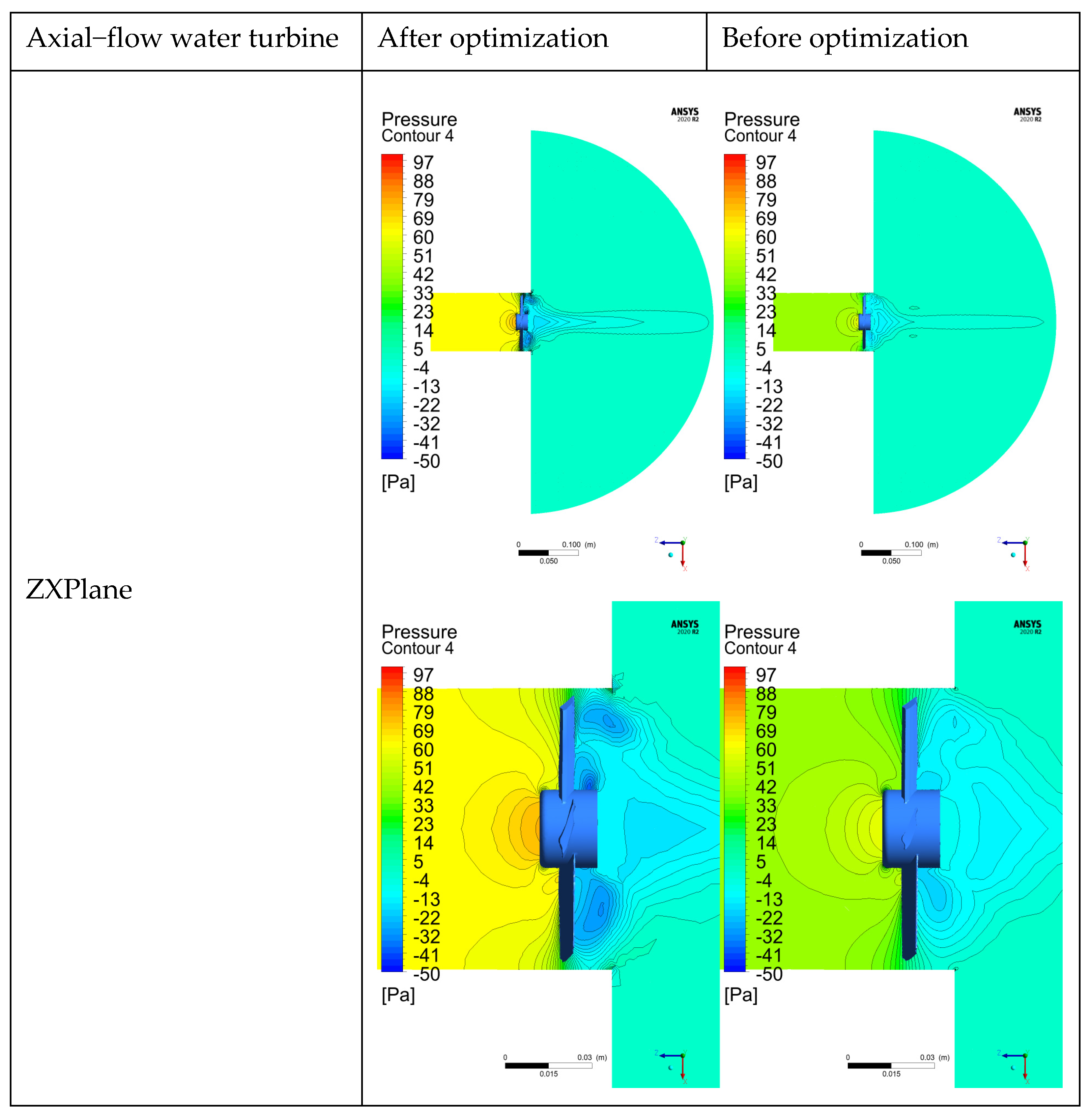
In this paper, the pressure nephogram of the ZX plane is intercepted, as shown in
Figure 23 specifically. Since the pressure nephogram of the ZY plane is consistent with that of the ZX plane, to avoid content redundancy, the pressure nephogram of the ZY plane is not shown in this paper.
It can be observed from the intercepted pressure nephogram of the ZX plane that the pressure of the optimized axial-flow water turbine in its upstream region is higher than that before optimization, while the pressure in the downstream region is lower than that before optimization. Through data comparison, the pressure difference before and after the optimized water turbine is about 10 Pa, while the pressure difference before and after the water turbine before the optimization is about 5 Pa. Based on this, we can infer that the optimized water turbine has a stronger work capacity.
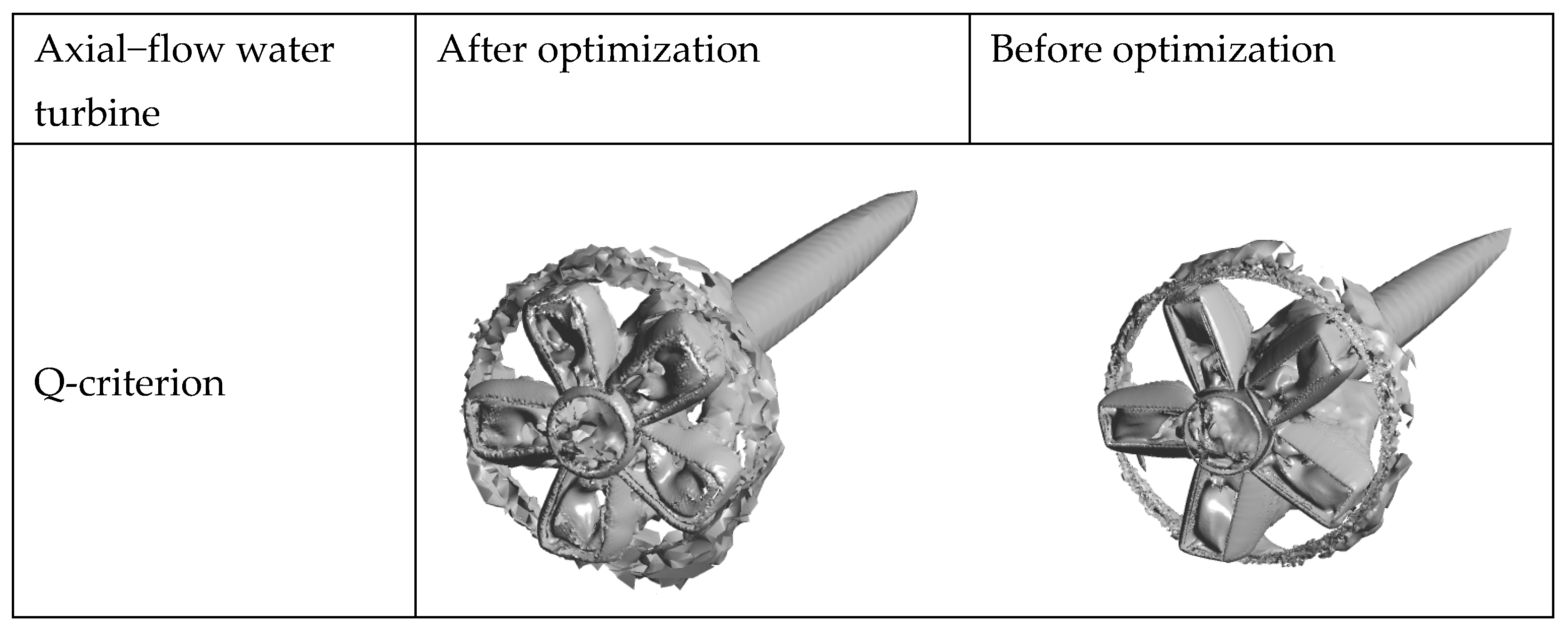
However, a phenomenon worthy of attention occurs at the blade tip part. The vortices generated by the optimized water turbine are larger than those before optimization. This situation may have an adverse effect on the noise level and lead to worse noise conditions. Specific content about the noise is introduced in detail in the next chapter. Combining with the Q-criterion of the vortex field, as shown in
Figure 24 below, the Q-criterion is based on the velocity gradient tensor
of the flow field and decomposes it into a symmetric part
(strain rate tensor) and an antisymmetric part
(rotation rate tensor). Among them,
,
. The Q value is defined as
, which measures the relative intensity of rotation and strain in the flow field. When Q > 0, the rotation effect in the flow field is dominant, and there may be vortex structures; when Q < 0, the strain effect is dominant. It can be found from the Q-criterion diagram that the intensity and area of the vortices of the optimized water turbine are larger than those before optimization, and the minimum value of the Q value is 0.01. Therefore, the main factor of the vortices in the flow field is caused by rotation.
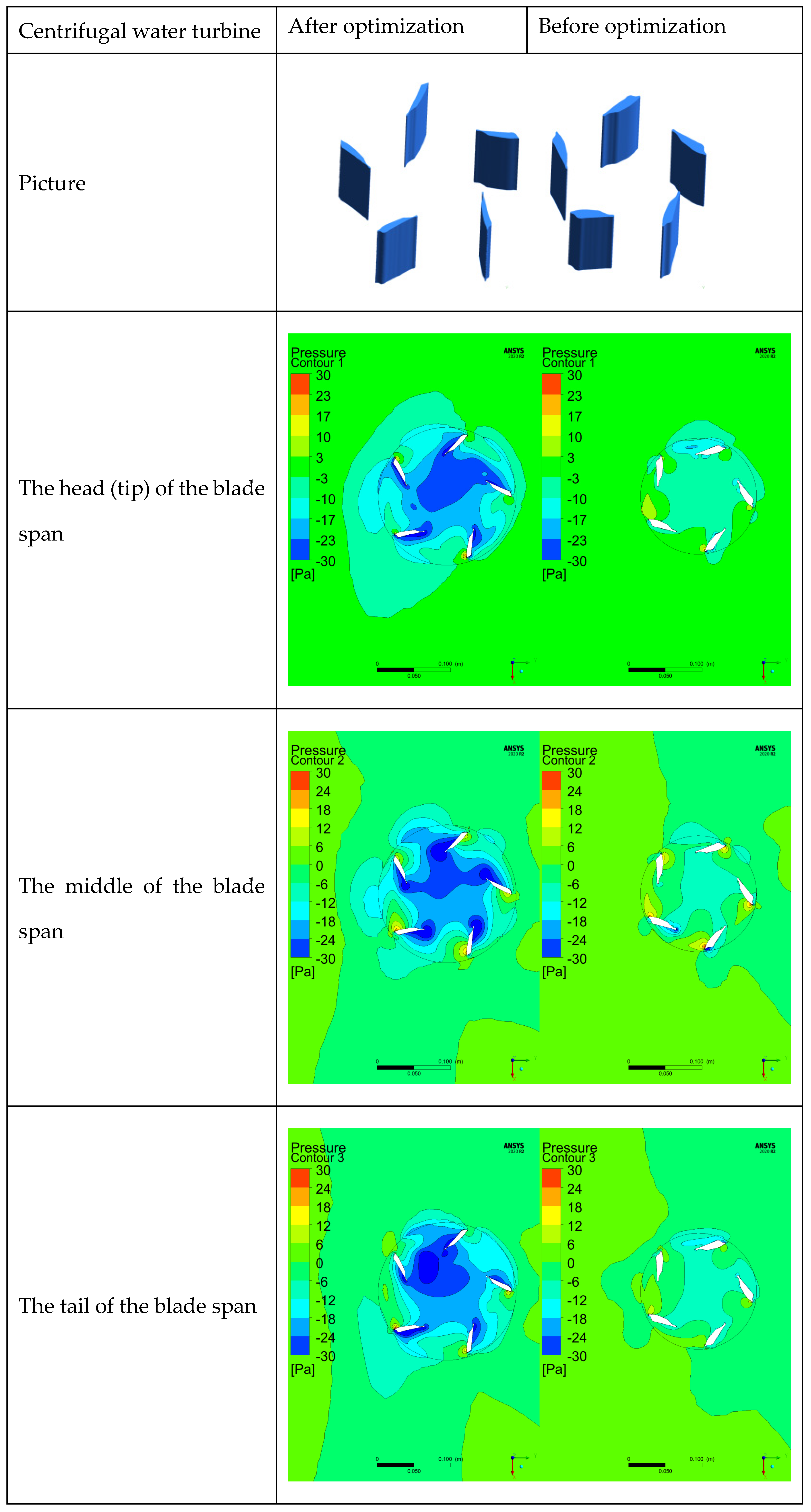
Similar to the treatment of the axial-flow turbine, in this paper, three planes are also intercepted for the centrifugal turbine, namely the head (tip) of the blade span, the middle of the blade span, and the tail of the blade span. From the pressure contour maps of these three planes (
Figure 25), it can be found that the pressure differences between the front (pressure side) and the rear (suction side) of the optimized turbine blades are all greater than those before optimization. In a centrifugal turbine, the airfoil uses lift to push the blades to move, thereby realizing the rotation of the turbine. The pressure difference between the front and rear of the blade surface is the key parameter for generating lift.
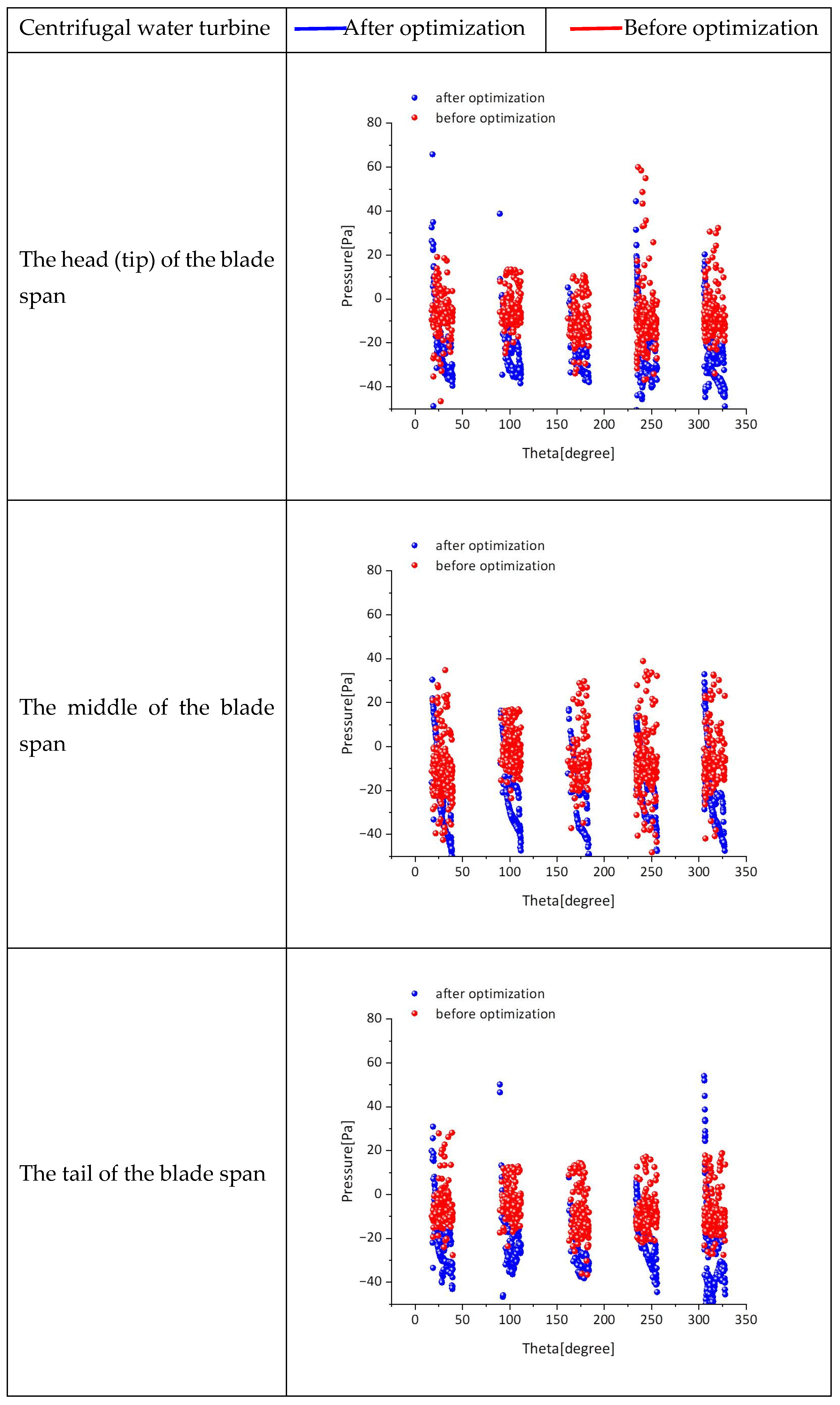
According to the pressure curve (
Figure 26), the maximum pressure differences between the front and rear of the blades on the three planes of the optimized turbine are 85 Pa, 70 Pa, and 58 Pa respectively, while the corresponding maximum pressure differences before optimization are 70 Pa, 50 Pa, and 39 Pa respectively. It can be seen that the working capacity of the optimized turbine is significantly higher than that before optimization.
In addition, the distributions of the high-pressure and low-pressure peaks of the five blades of the centrifugal turbine are not as uniform as those of the axial-flow turbine. This is mainly due to the differences in the fluid flow patterns during the operation of the two types of turbines. When the axial-flow turbine is in operation, the fluid can uniformly pass through the five blades from the upstream. However, when the centrifugal turbine is in operation, the fluid passes through the five blades in sequence, and the position of each blade relative to the incoming flow is different. At the same time, the wake generated by the front blades will also affect the wake of the rear blades, resulting in non-uniform pressure distribution.
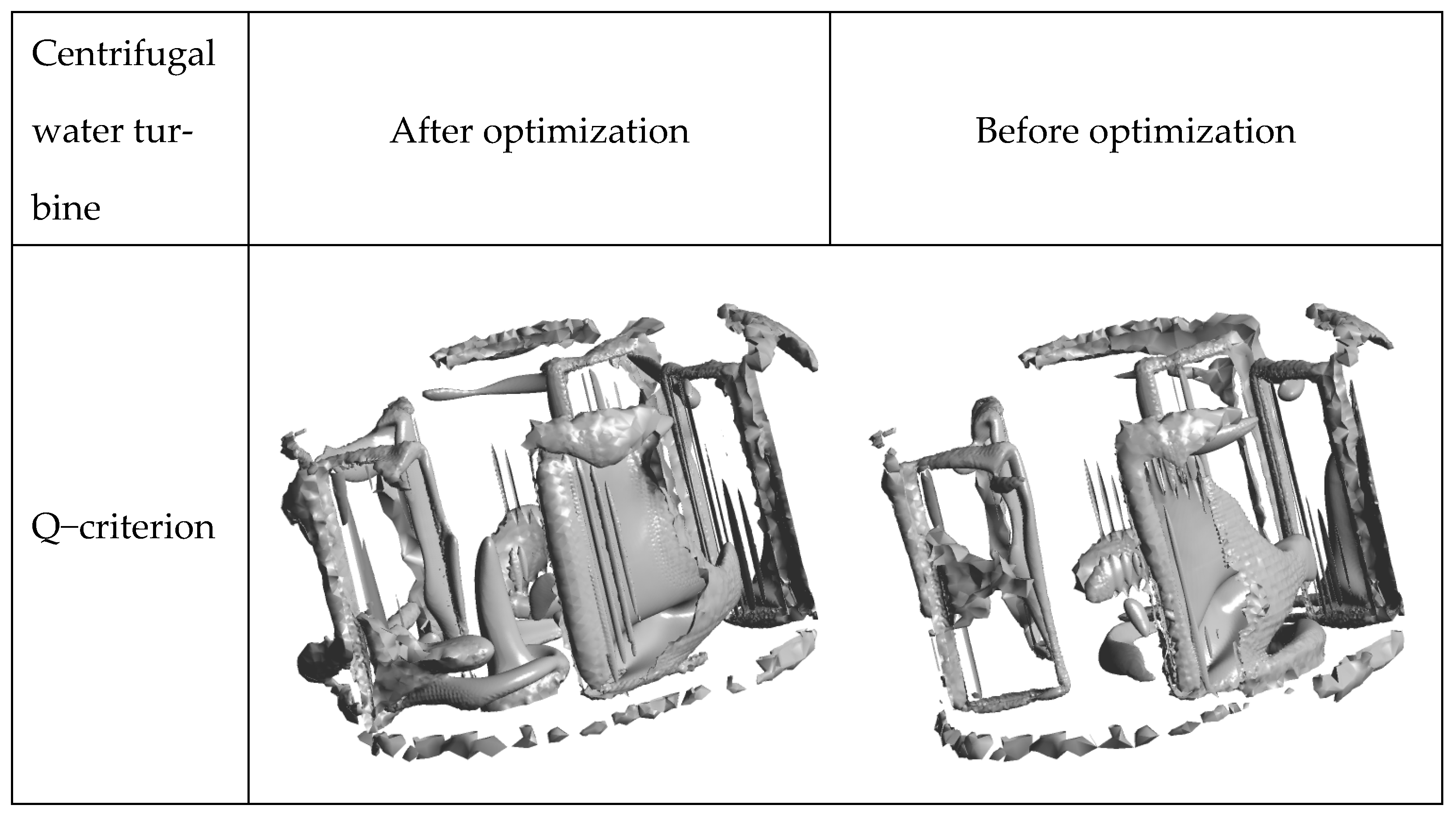
Figure 27 below shows the Q-criterion image of the centrifugal water turbine. It can be seen from the figure that the result is similar to that of the axial-flow fan. For the optimized centrifugal water turbine, the intensity of its vortex field is significantly greater than that before optimization.
In the flow field, the main cause of vortex formation is rotation. In the case of the centrifugal water turbine, this situation mainly occurs because the pressure difference between the front and back of the blades of the optimized water turbine increases, enhancing the work capacity of the water turbine. This change leads to an increase in the degree of rotation of the flow field and thus increases the intensity of the vortices.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}