
Direct Force Control Technology for Longitudinal Trajectory of Receiver Aircraft Based on Incremental Nonlinear Dynamic Inversion and Active Disturbance Rejection Controller

Abstract
1. Introduction
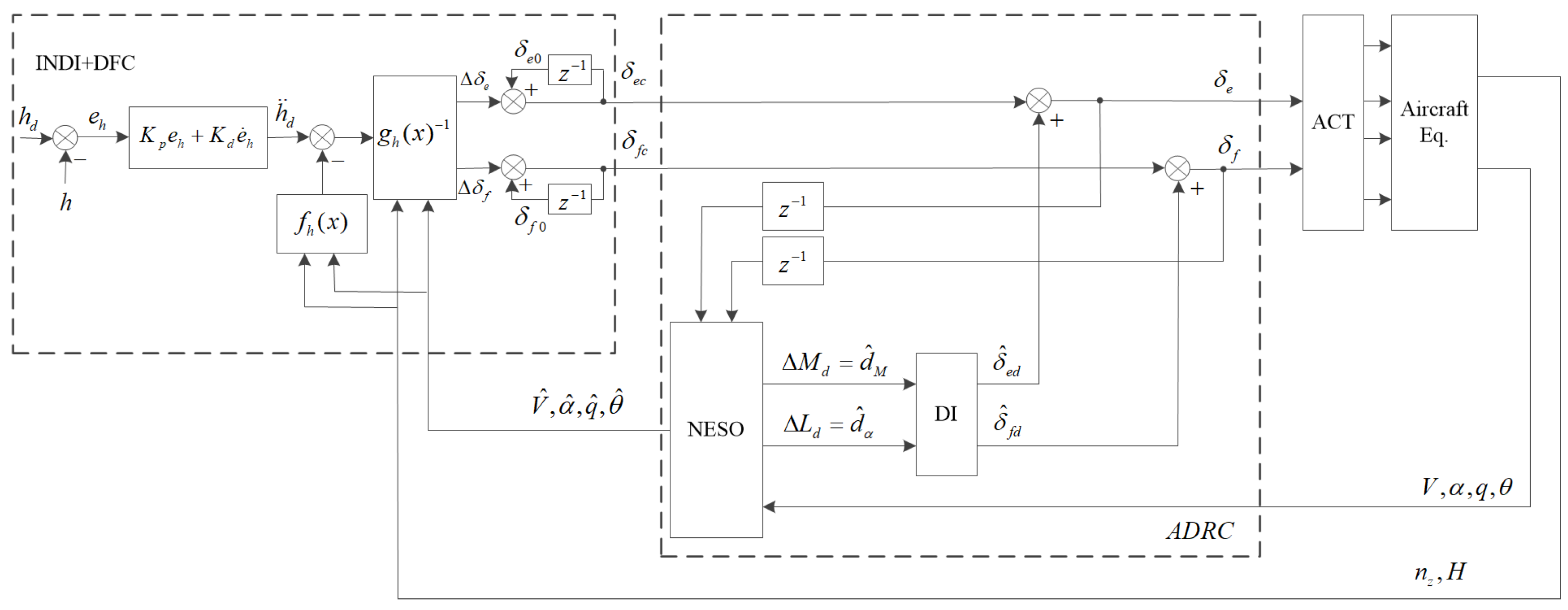
- Novel control strategy integration: We propose a hybrid control framework combining INDI-based direct lift control (DLC) with an NESO, addressing the longitudinal trajectory control challenge for receiver aircraft in aerial refueling. This integration enables fast altitude tracking while suppressing wind disturbances, a gap in existing single-model control approaches.
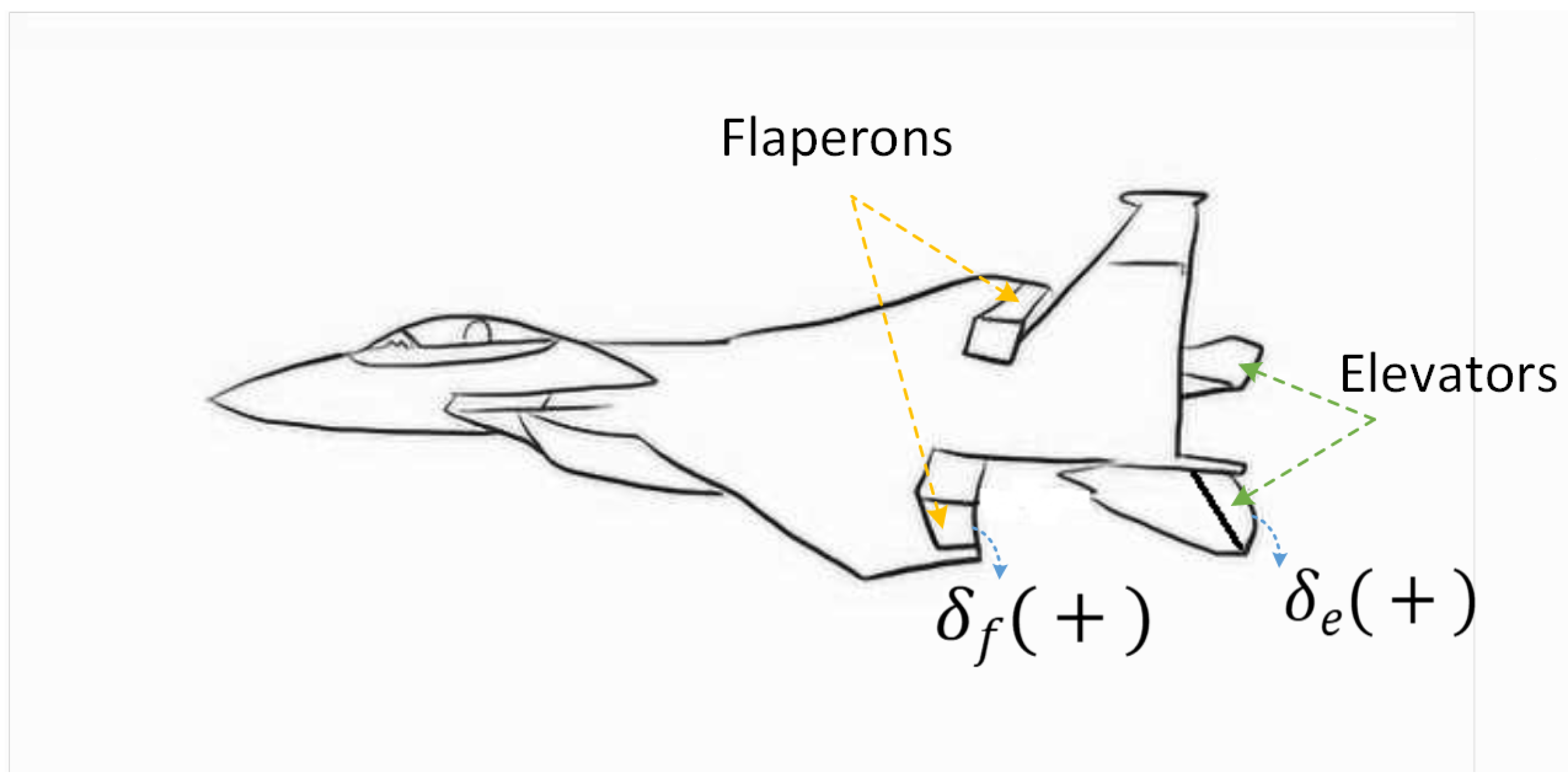
- Collaborative control mechanism: We develop a DLC strategy via symmetric flaperon–elevator coordination, bypassing conventional aerodynamic delays. This mechanism establishes a new longitudinal dynamics model that achieves sub-0.2 m altitude tracking accuracy under moderate Dryden wind conditions.
- Disturbance estimation and compensation: We design an NESO with optimized gains via pole configuration and robust enhancement, enabling real-time estimation of and compensation for external wind disturbances and internal model uncertainties. This addresses the limitation of conventional observers in dynamic environments, as proven by Lyapunov stability analysis.
2. DLC Strategy and Longitudinal Dynamics Modeling of the Receiver Aircraft
2.1. Direct Lift Generation Mechanism
2.2. Longitudinal Force Equations
2.3. Pitching Moment Equation
3. The Altitude Control Law Architecture for the Receiver Aircraft
4. The NESO for the Receiver Aircraft
4.1. General Design Method of the NESO
4.2. Design of the State Observer for the Receiver Aircraft
4.2.1. State Equation Modeling
4.2.2. Construction of the Observer Equation
4.3. Design of the Observer Gain
4.3.1. Linearization of the Error System
4.3.2. Pole Placement Strategy
4.3.3. Robustness Enhancement Optimization Design
- The dynamic performance of the observer meets the design requirements, meaning that the system can converge at the desired speed and damping characteristics;
- The Lyapunov derivative () is negative and definite, endowing the system with asymptotic stability and guaranteeing that the observer can operate stably under various working conditions without divergence;
- The gain matrix satisfies the noise suppression constraint, avoiding excessive noise introduced by overly large gains and, thus, enhancing the robustness of the observer. This enables the observer to maintain good performance, even in the presence of measurement noise and model mismatch.
5. Design of the Longitudinal Altitude Tracking Control Law
5.1. Design Method of INDI Control
5.2. Design of the Altitude Tracking Control Law
5.2.1. Altitude Dynamics Equation
5.2.2. Design Steps of the Control Law
5.2.3. System Stability Proof
5.3. Implementation Details of the Control
- Real-time model update: Refresh and in each control cycle to adapt to the changes in the flight state.
- Treatment of control surface constraints: Apply saturation limits to the calculated and (, ).
- Initialization strategy: Initialize as the control surface deflection angle corresponding to the trim state.
6. Simulation Verification
6.1. Simulation Parameters
6.2. Simulation Scenarios
- Normal conditions: Initial height of m, initial velocity of 197.1 m/s, and target height of m, with no external disturbance, using the control method proposed in this paper.
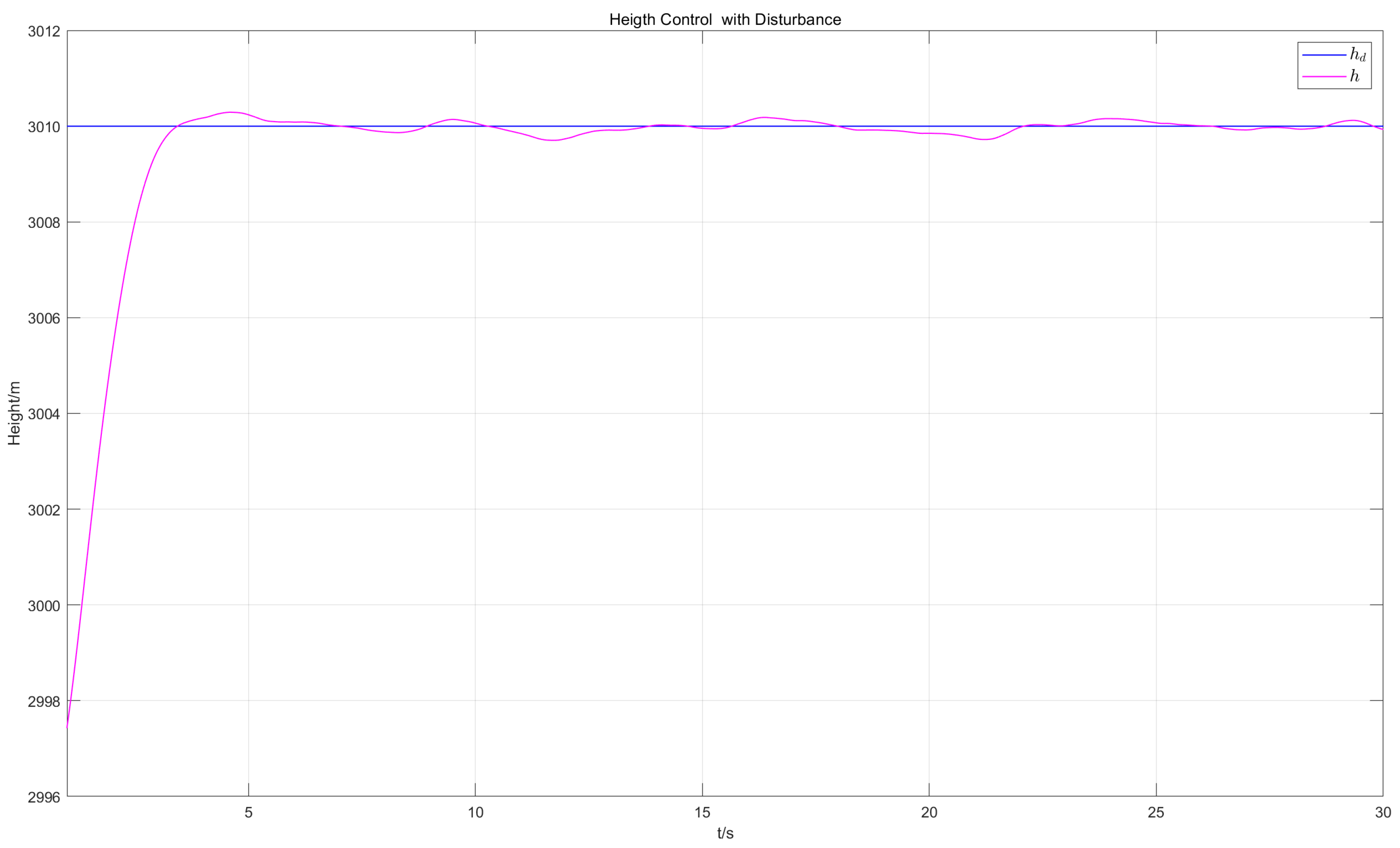
- Disturbance conditions: Initial height of m, initial velocity of 197.1 m/s, and of target height m, applying moderate-intensity Dryden turbulence wind (probability of the turbulence intensity exceeds ) and tanker wake disturbance (acquired via computational fluid dynamics (CFD) calculations) to the receiver aircraft, using the control method proposed in this paper.
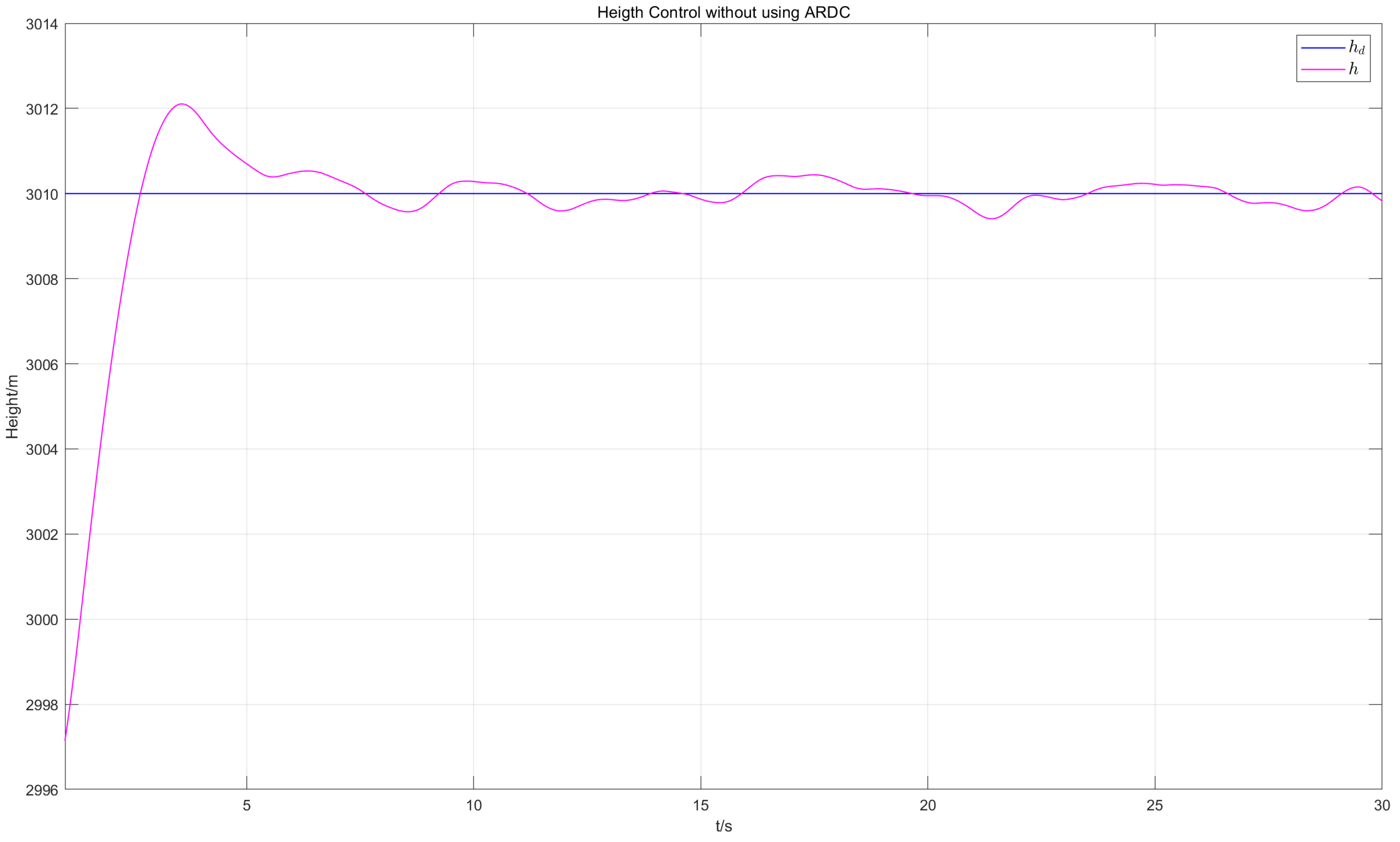
- Disturbance conditions without ARDC: Initial height of m, initial velocity of 197.1 m/s, and target height of m, applying moderate-intensity Dryden turbulence wind and tanker wake disturbance to the receiver aircraft, without using ARDC. The disturbances are the same as in scenario 2.
6.3. Analysis of Results
6.3.1. Altitude Tracking Performance
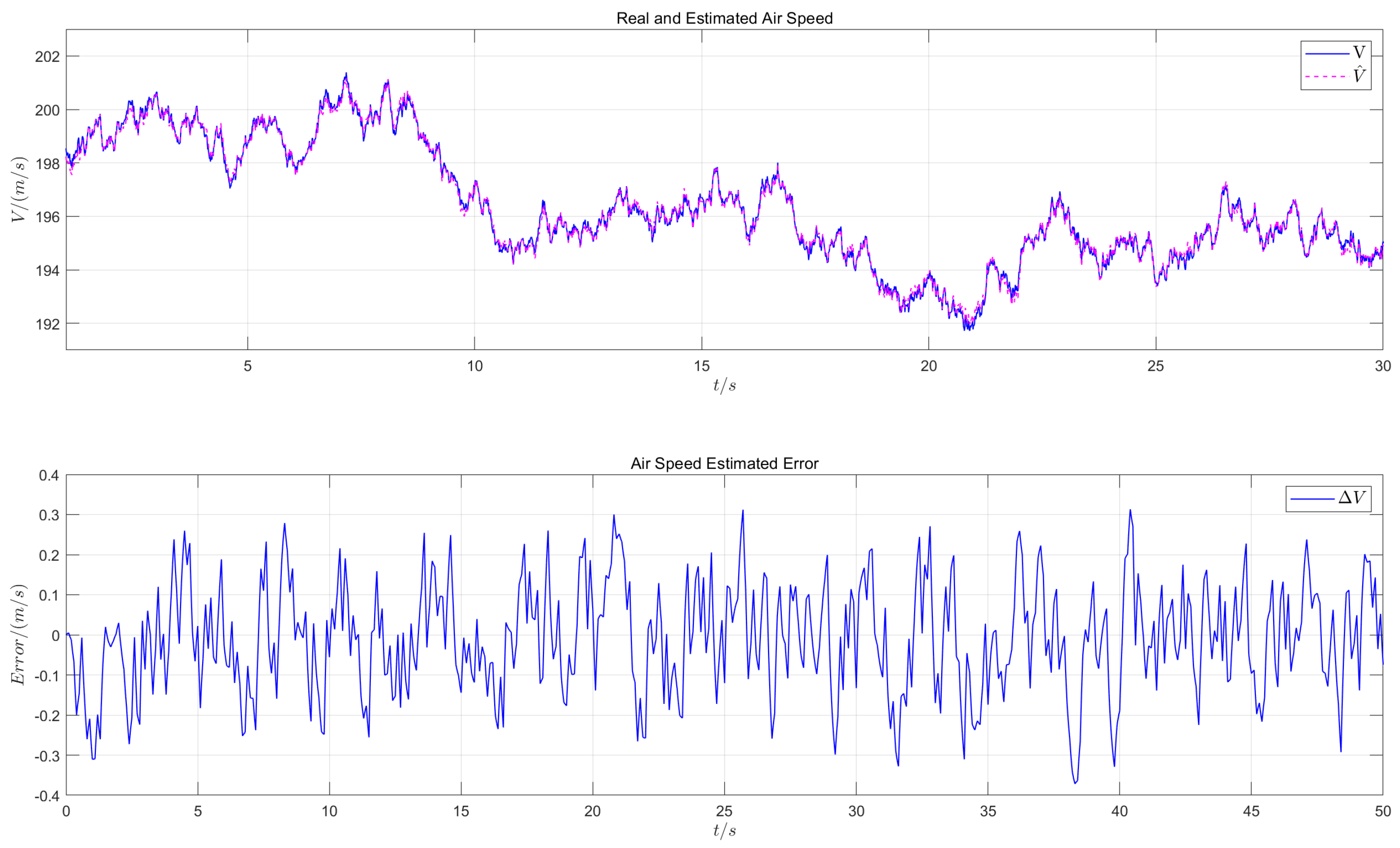
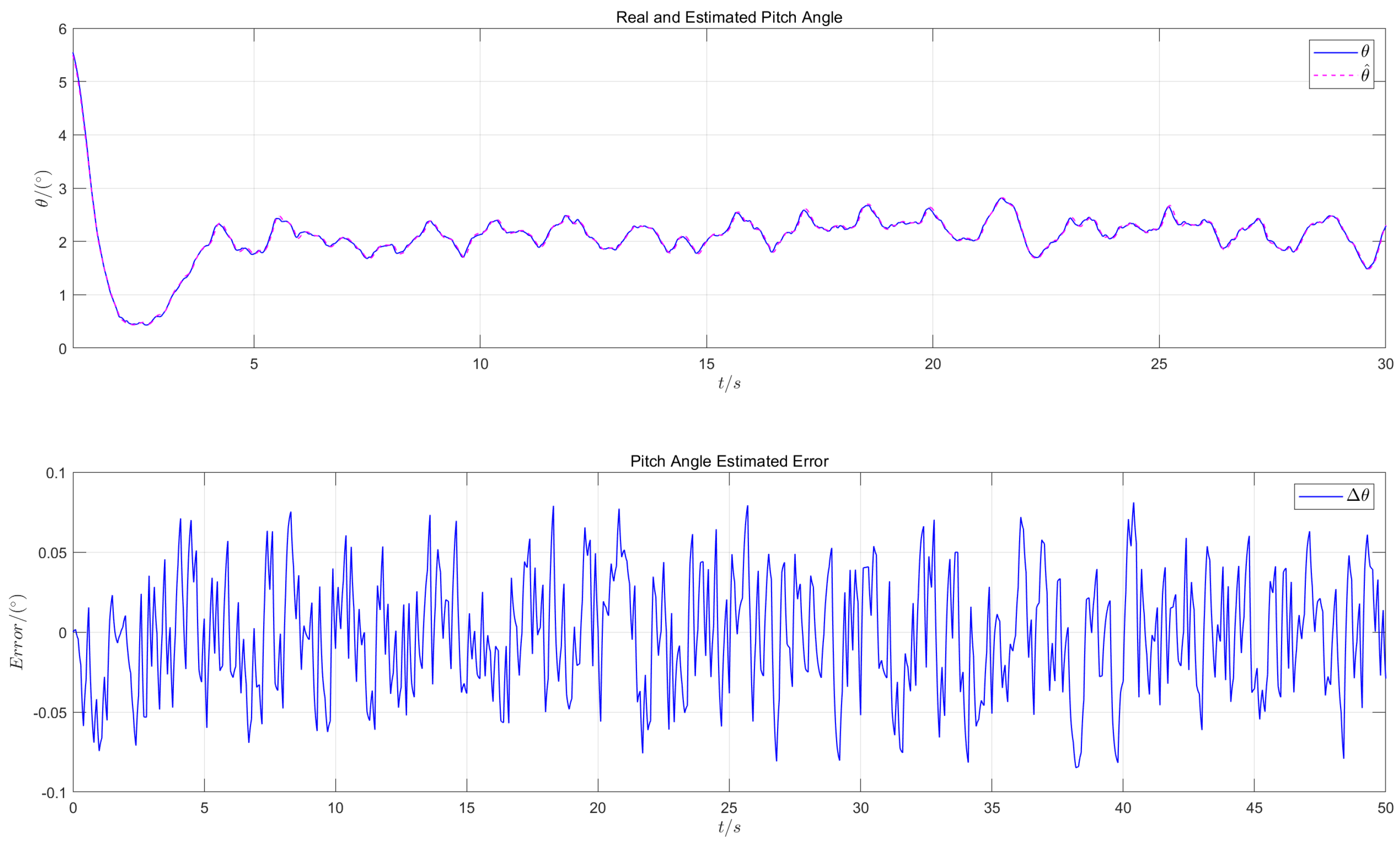
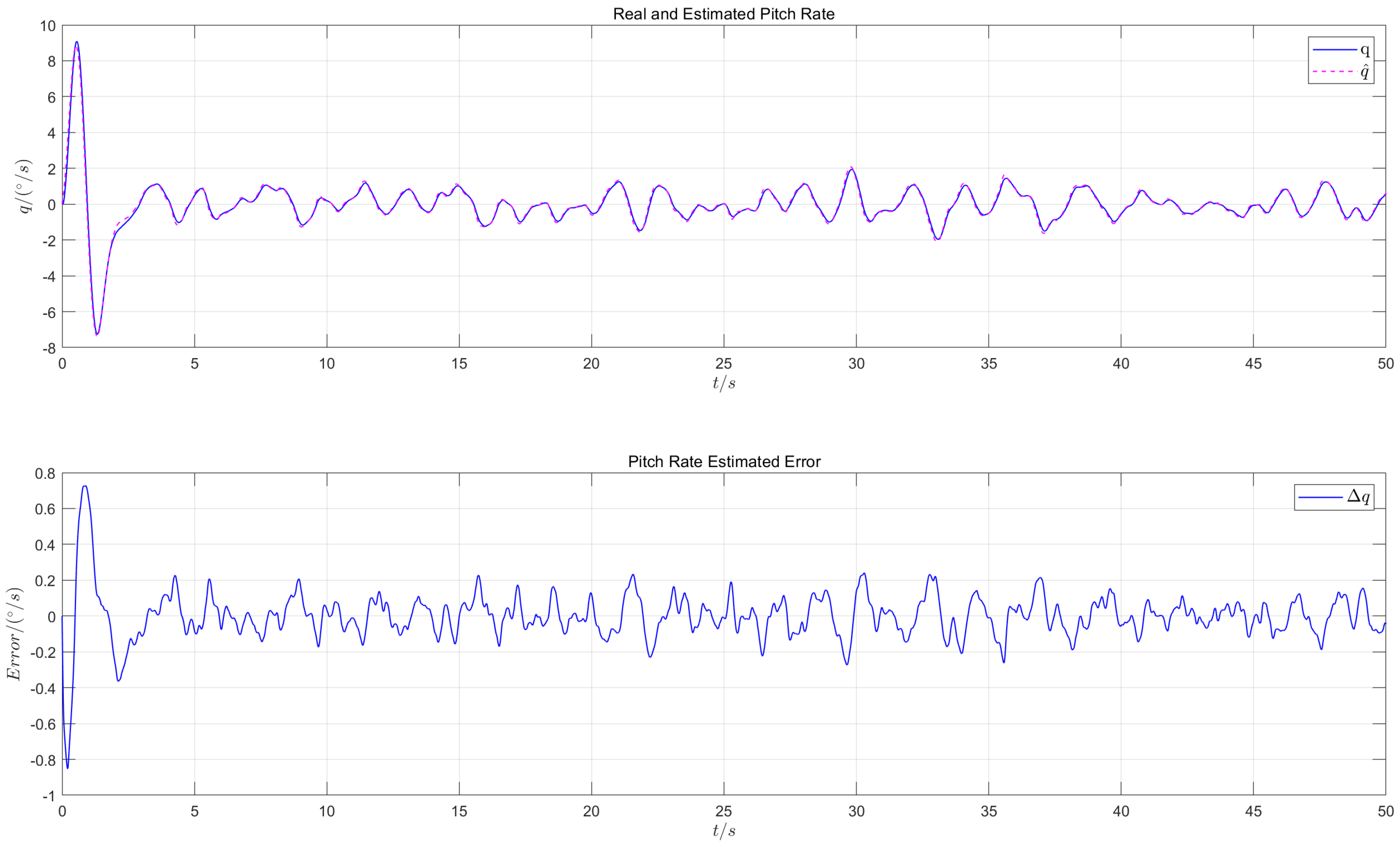
6.3.2. State Estimation Accuracy
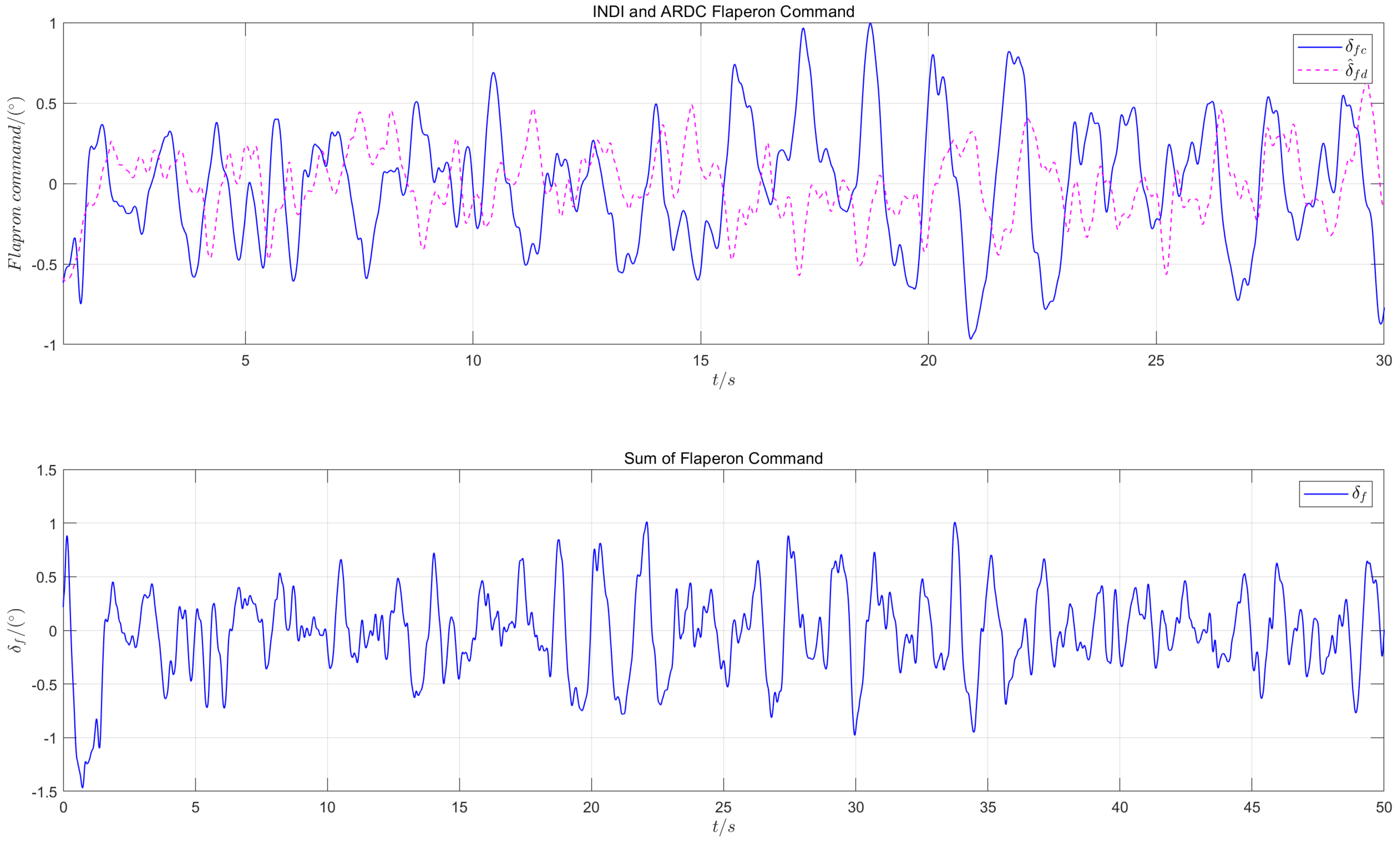
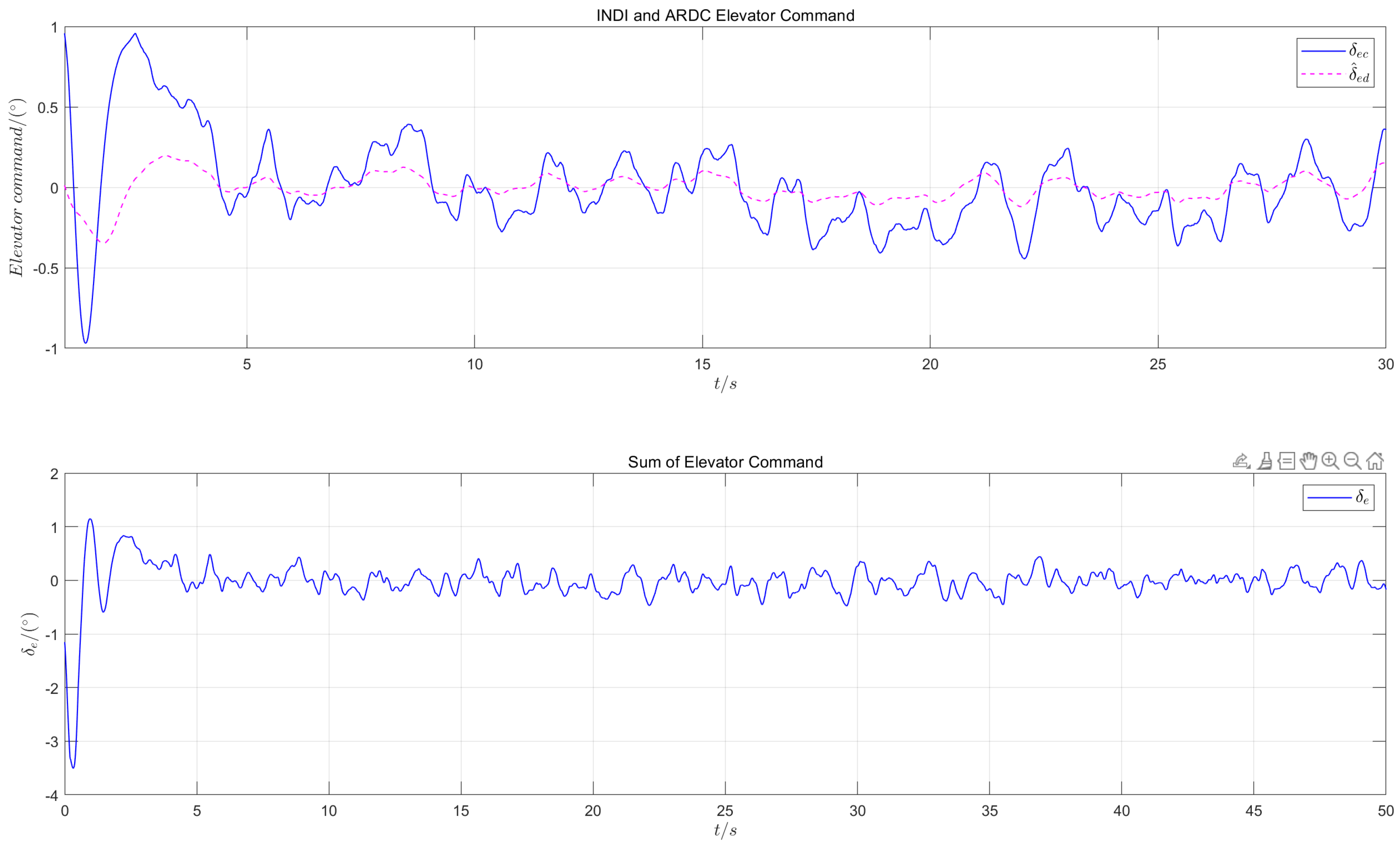
6.3.3. Characteristics of Control Surface Deflection
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Thomas, P.R.; Bhandari, U.; Bullock, S.; Richardson, T.S.; du Bois, J.L. Advances in air to air refuelling. Prog. Aerosp. Sci. 2014, 71, 14–35. [Google Scholar] [CrossRef]
- Zhu, Y.; Sun, Y.; Zhao, W.; Huang, B.; Wu, L. Relative navigation for autonomous aerial refueling rendezvous phase. Opt.-Int. J. Light Electron Opt. 2018, 174, 665–675. [Google Scholar] [CrossRef]
- Tao, Y.; Yan, X. Current Status and Development Trends of Foreign Aerial Refueling Technologies and Equipment. Aircr. Des. 2021, 41, 39–43. [Google Scholar]
- Quan, Q.; Wei, Z.B.; Gao, J.; Zhang, R.F.; Cai, K.Y. A survey on modeling and control problems for probe and drogue autonomous aerial refueling at docking stage. Acta Aeronaut. Astronaut. Sin. 2014, 35, 2390–2410. [Google Scholar]
- Ren, J.; Dai, X.; Quan, Q.; Wei, Z.; Cai, K. Reliable Docking Control Scheme for Probe–Drogue Refueling. J. Guid. Control Dyn. 2019, 42, 2511–2520. [Google Scholar] [CrossRef]
- Li, Y.; Zhang, Y.; Bai, J. Numerical Simulation of the Aerodynamic Influence of Aircrafts During Aerial Refueling with Engine Jet. Int. J. Aeronaut. Space Sci. 2020, 21, 15–24. [Google Scholar] [CrossRef]
- Huang, Y.; Yuan, S.; Yan, L. Aerial Refueling Docking Flight Control Based on Direct Lift. Ordnance Ind. Autom. 2021, 40, 62–67. [Google Scholar]
- Lou, J. Research on Key Technology of Precise Control for Aerial Refueling UAV. Ph.D Thesis, Northwestern Polytechnical University, Xi’an, China, 2014. [Google Scholar]
- Zhang, B. Docking Control Method For Autonomous Aerial Refueling For Unmanned Aerial Vehicles. Master’s Thesis, Harbin Institute of Technology, Harbin, China, 2014. [Google Scholar]
- Wang, L.; Yin, H.; Guo, Y. Closed-loop Motion Characteristic Requirements of Receiver Aircraft for Probe and Drogue Aerial Refueling. Aerosp. Sci. Technol. 2019, 93, 105293. [Google Scholar] [CrossRef]
- Kriel, S.C.; Engelbrecht, J.A.; Jones, T. Receptacle Normal Position Control for Automated Aerial Refueling. Aerosp. Sci. Technol. 2013, 29, 296–304. [Google Scholar] [CrossRef]
- Hua, Y.; Zou, Q.A.; Tian, H. Control Strategy and Simulation for Probe and Drogue Aerial Autonomous Refueling. J. Beijing Univ. Aeronaut. Astronaut. 2021, 49, 262–270. [Google Scholar]
- Wang, H.; Liu, Y.; Su, Z. Precise Docking Control for UAV Autonomous Aerial Refueling. Electron. Opt. Control 2020, 27, 1–8. [Google Scholar]
- Wu, J.; Luo, H.; Ai, J. Docking Controller for Autonomous Aerial Refueling with Adaptive Dynamic Surface Control. IEEE Access 2020, 8, 99846–99857. [Google Scholar] [CrossRef]
- Huang, Y. Flight Control and Simulation of Aerial Refueling Docking Based on Direct Force. Master’s Thesis, Nanjing University of Aeronautics and Astronautics, Nanjing, China, 2014. [Google Scholar]
- Du, X.; Zhu, Z.; Hu, F.; Huang, J.; Liu, G.; Zhang, S.; Shan, E.; Tang, J. Guidance, Navigation and Control for Airborne Docking of Autonomous Aerial Refueling. Acta Aeronaut. Astronaut. Sin. 2023, 44, 628827. [Google Scholar]
- Hernández-González, O.; Targui, B.; Valencia-Palomo, G.; Guerrero-Sánchez, M.E. Robust cascade observer for a disturbance unmanned aerial vehicle carrying a load under multiple time-varying delays and uncertainties. IEEE Syst. J. 2024, 55, 1056–1072. [Google Scholar] [CrossRef]
- Guerrero-Sánchez, M.E.; Montoya-Morales, J.R.; Valencia-Palomo, G.; Hernández-González, O. Robust IDA-PBC for non-separable PCH systems under time-varying external disturbances. Nonlinear Dyn. 2025, 113, 3499–3510. [Google Scholar] [CrossRef]
- Liu, Y.; Wang, H.; Fan, J. Docking Safety Assessment and Optimization for Autonomous Aerial Refueling: A Data-Driven Method. IEEE Syst. J. 2021, 15, 4057–4068. [Google Scholar] [CrossRef]
- Yi, Y.; Zheng, W.; Liu, B. Adaptive Anti-Disturbance Control for Systems with Saturating Input via Dynamic Neural Network Disturbance Modeling. IEEE Trans. Cybern. 2022, 52, 5290–5300. [Google Scholar] [CrossRef]
- Fravolini, M.L.; Ficola, A.; Campa, G. Modeling and Control Issues for Autonomous Aerial Refueling for UAVs Using a Probe–drogue Refueling System. Aerosp. Sci. Technol. 2004, 8, 611–618. [Google Scholar] [CrossRef]
- Chen, H.; Zhang, S.; Fang, Z. Implicit NDI Robust Nonlinear Control Design with Acceleration Feedback. Acta Aeronaut. Astronaut. Sin. 2009, 30, 597–603. [Google Scholar]
- Song, M.; Zhang, F.; Huang, X.; Huang, P. Anti-Disturbance Control for Tethered Aircraft System with Deferred Output Constraints. IEEE/CAA J. Autom. Sin. 2023, 10, 474–485. [Google Scholar] [CrossRef]
- Chen, Z.; Gao, Q. Linear/nonlinear switching extended state observer. Control Theory Appl. 2019, 36, 902–908. [Google Scholar]
- Liu, J.; Tan, J.; Li, H.; Chen, B. Active Disturbance Rejection Consensus Control of Multi-Agent Systems Based on a Novel NESO. Control Theory Appl. 2025, 30, 634–644. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Units |
|---|---|---|
| m | 18,000 | kg |
| S | 50 | |
| kg · | ||
| 1.225 | ||
| T | 25,000 | N |
| 4.5 | m | |
| 0.23 | / | |
| 0.019 | / | |
| 3.85 | ||
| 0.8 | ||
| −0.45 | ||
| 0.001 | ||
| 0.01 | ||
| 0.027 | ||
| 0.01 | ||
| 0.1 | ||
| 0.011 | ||
| 0.1 | ||
| −0.05 | / | |
| ° | ||
| ° |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bao, X.; Li, Y.; Wang, Z. Direct Force Control Technology for Longitudinal Trajectory of Receiver Aircraft Based on Incremental Nonlinear Dynamic Inversion and Active Disturbance Rejection Controller. Machines 2025, 13, 525. https://doi.org/10.3390/machines13060525
Bao X, Li Y, Wang Z. Direct Force Control Technology for Longitudinal Trajectory of Receiver Aircraft Based on Incremental Nonlinear Dynamic Inversion and Active Disturbance Rejection Controller. Machines. 2025; 13(6):525. https://doi.org/10.3390/machines13060525
Chicago/Turabian StyleBao, Xin, Yan Li, and Zhong Wang. 2025. "Direct Force Control Technology for Longitudinal Trajectory of Receiver Aircraft Based on Incremental Nonlinear Dynamic Inversion and Active Disturbance Rejection Controller" Machines 13, no. 6: 525. https://doi.org/10.3390/machines13060525
APA StyleBao, X., Li, Y., & Wang, Z. (2025). Direct Force Control Technology for Longitudinal Trajectory of Receiver Aircraft Based on Incremental Nonlinear Dynamic Inversion and Active Disturbance Rejection Controller. Machines, 13(6), 525. https://doi.org/10.3390/machines13060525