
Structural Analysis of a Modular High-Concentration PV System Operating at ~1200 Suns

 , , ,
, , ,  , ,
, ,
Abstract
1. Introduction
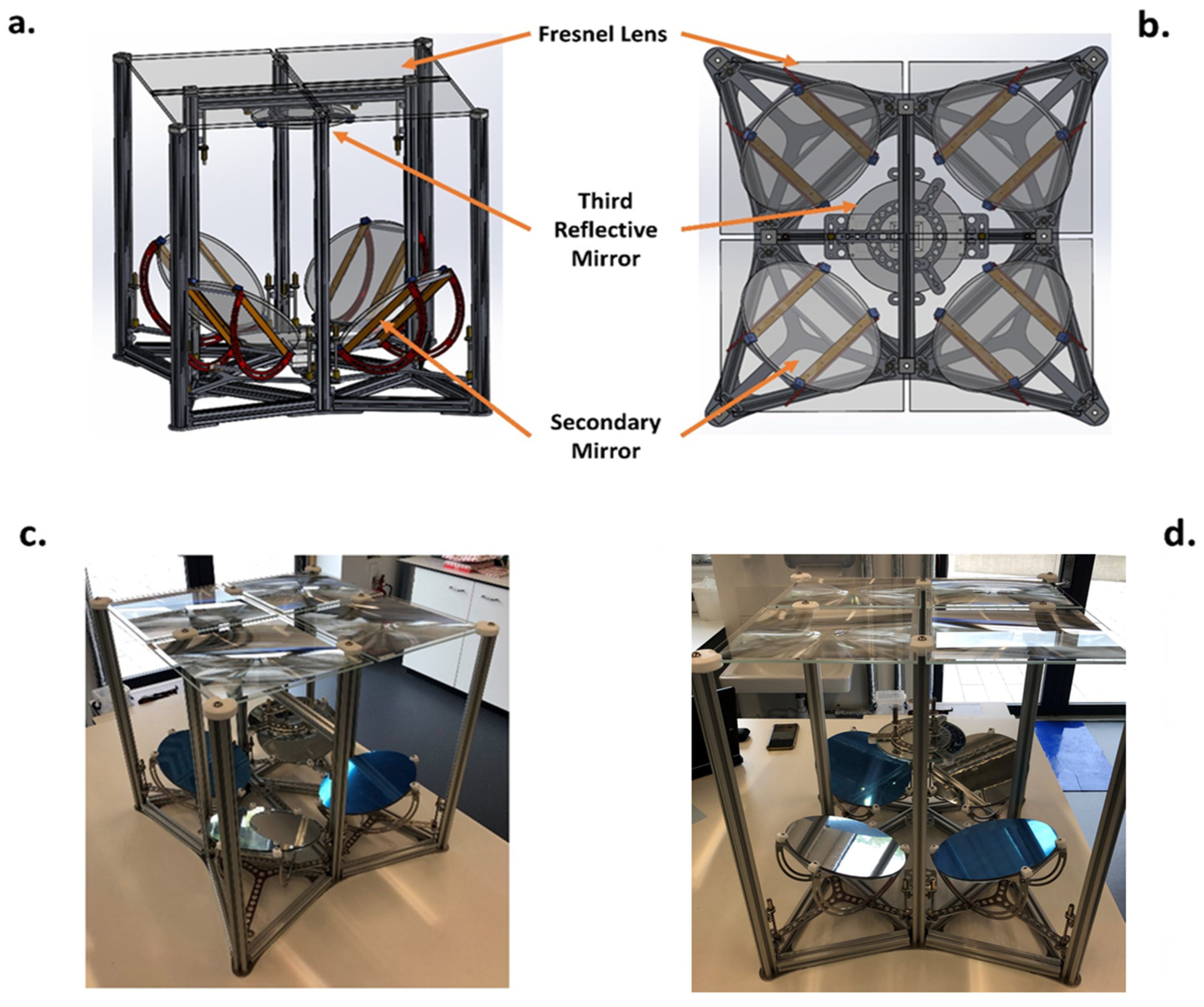
2. Structural Configuration and System Overview
- i.
- The framework is based on four pieces of Fresnel focal point lenses—Silicon on Glass (SOG).
- ii.
- Fresnel focal points are the settled input.
- iii.
- The framework is based on one central third stage and/or receiver.
- iv.
- The framework can work with three and/or four optical interfaces.
- v.
- All secondary optical stages are mechanically adjustable, offering a broad range of degrees of freedom.
- vi.
- Reflective surfaces in the secondary and third stages are interchangeable, with diameters of 10, 15, and 20 cm and thicknesses ranging from 4 to 6 mm.
- vii.
- The HCPV system is configured for testing with a sun tracker capable of supporting the system and counterbalance weights.
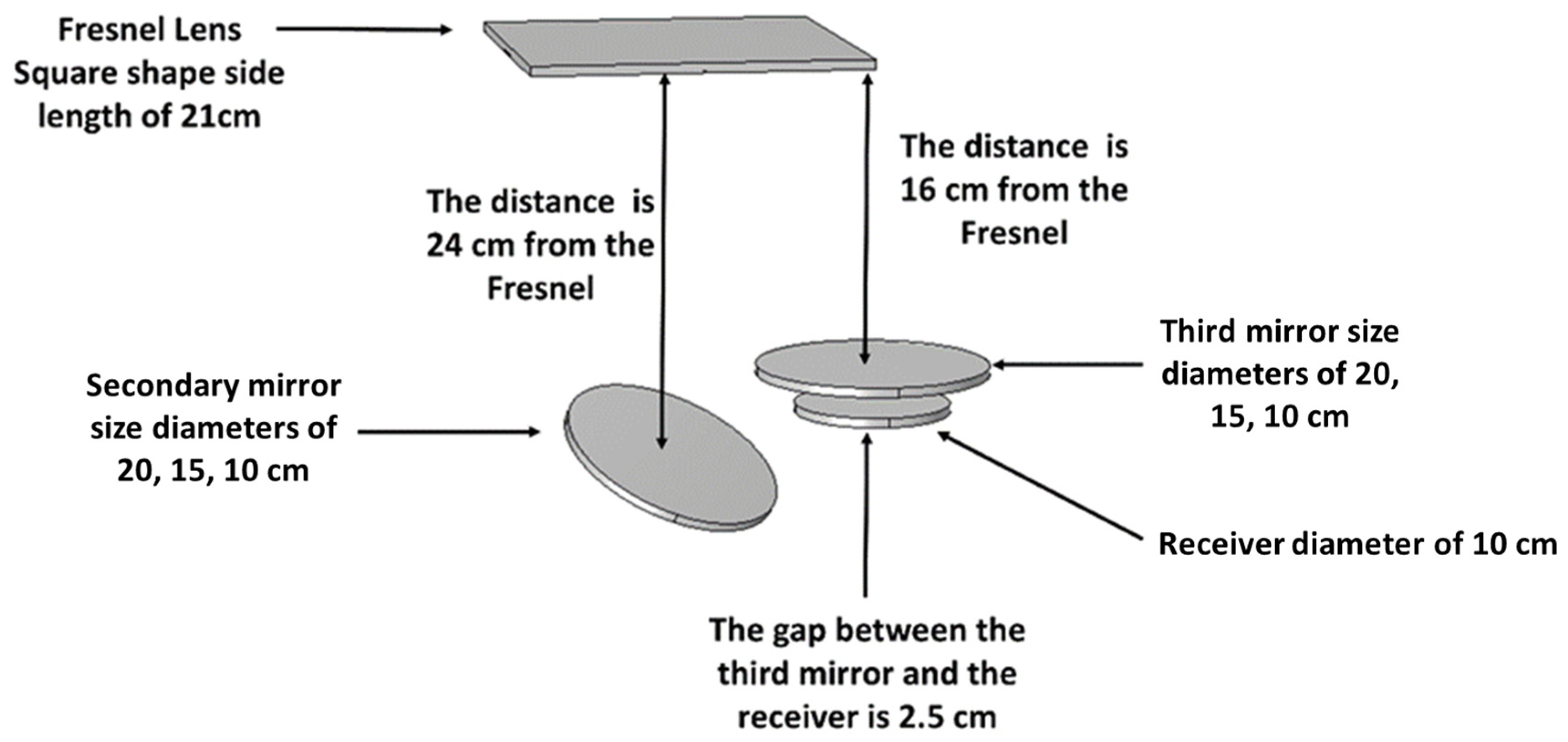
3. Optical Stages
3.1. Secondary Optical Stage
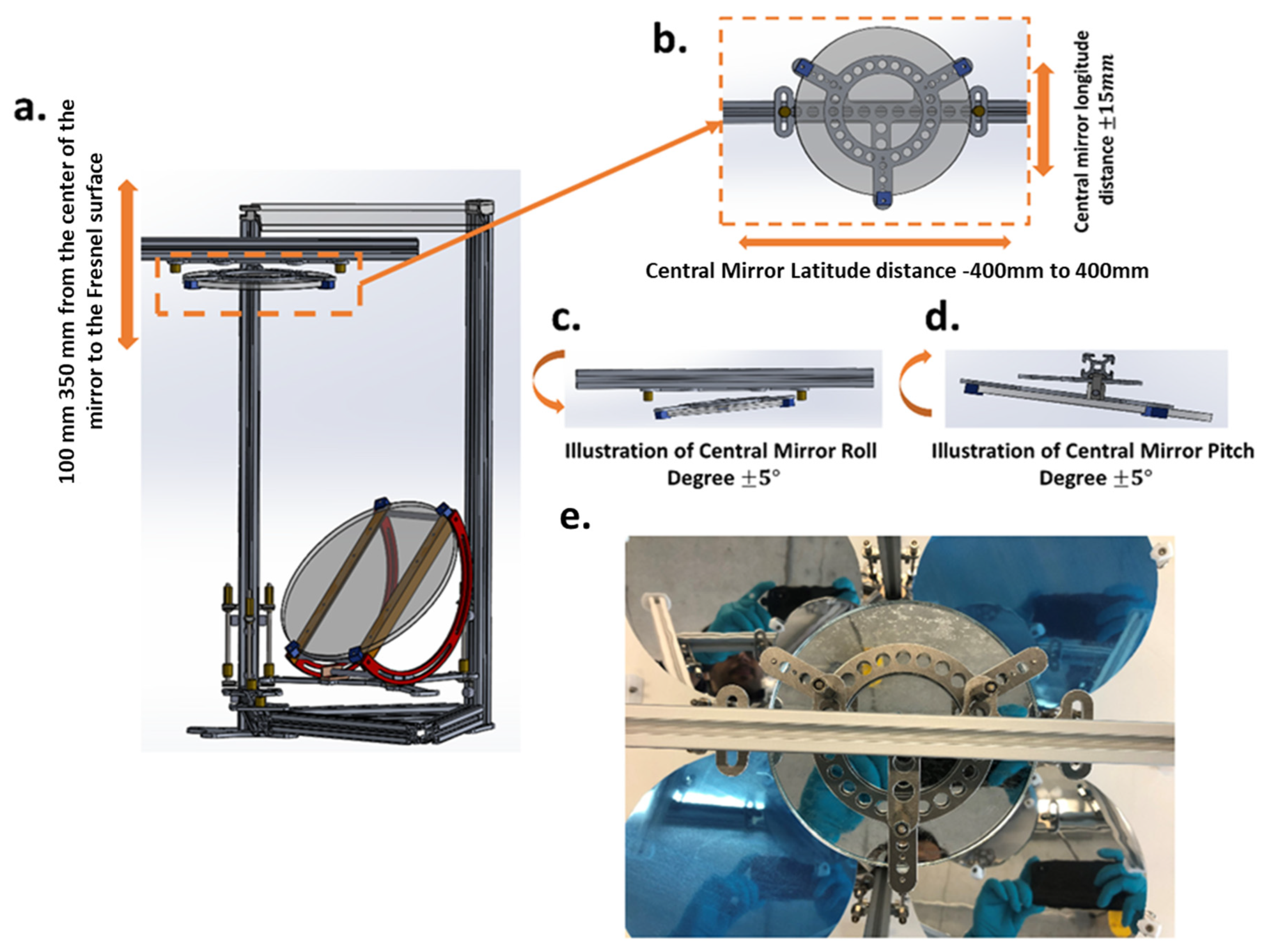
3.2. Third Optical Stage
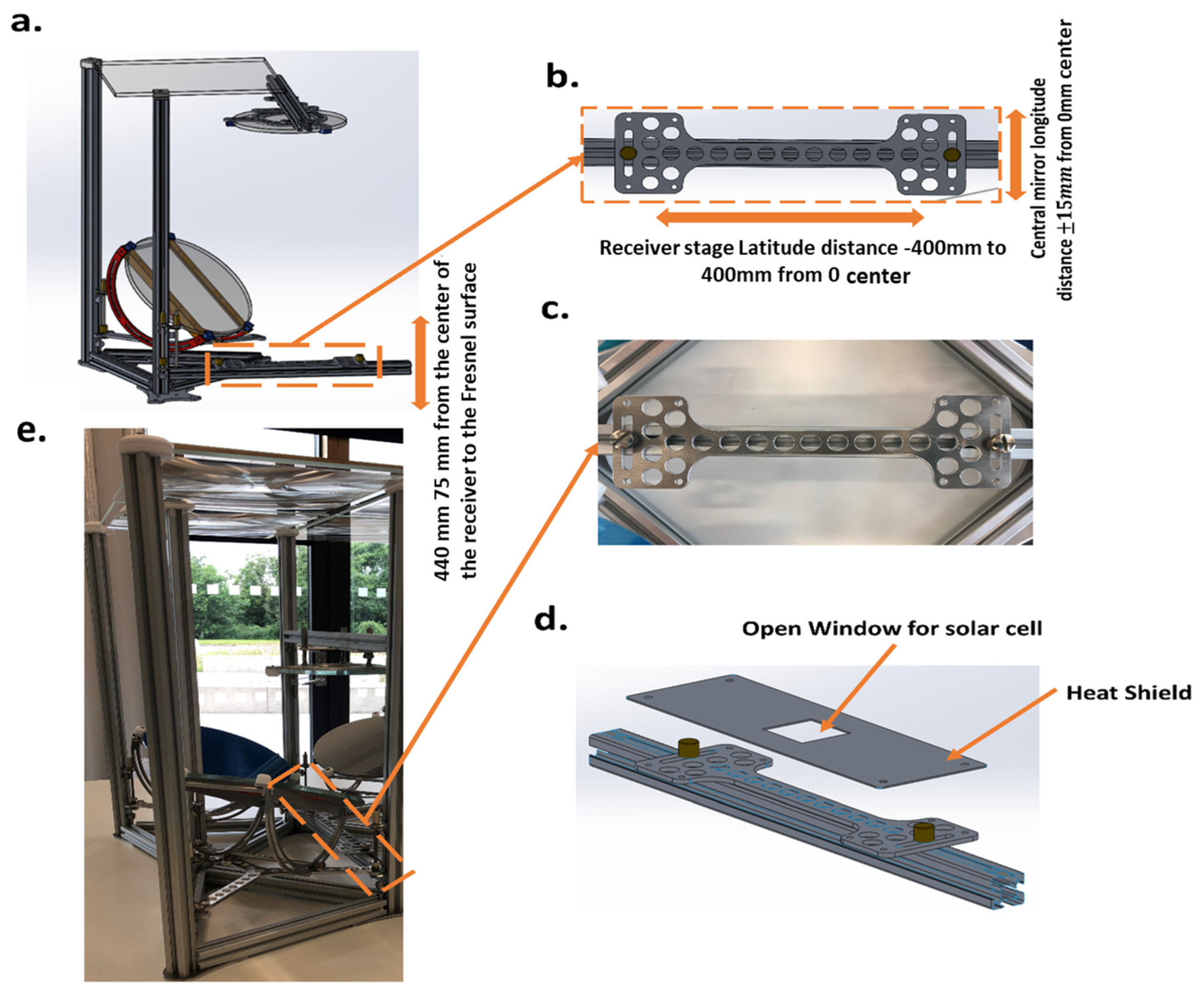
3.3. Receiver Stage
4. Materials Selection
5. Sun Tracker: Aspects and Limitations
6. Results and Analysis
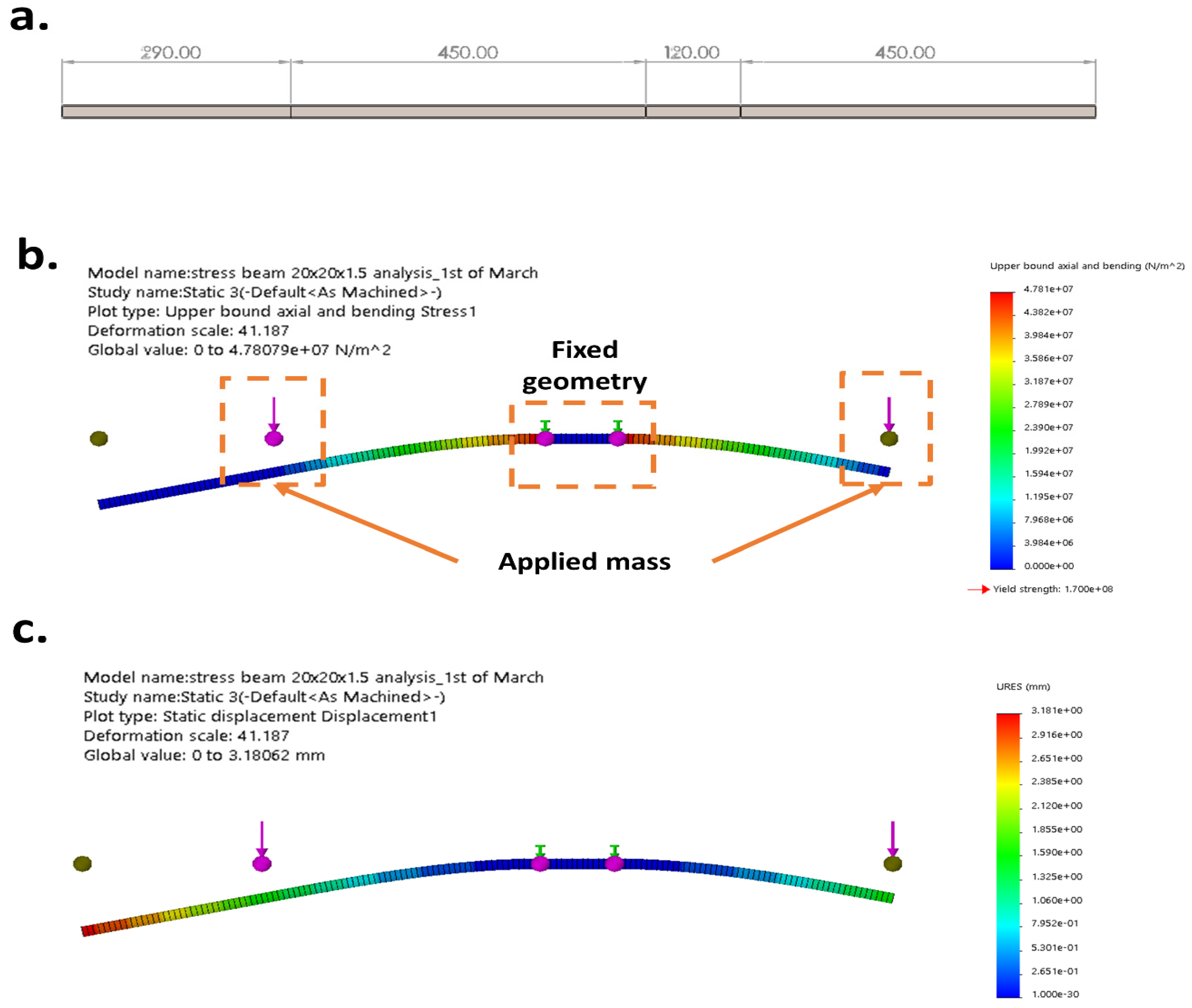
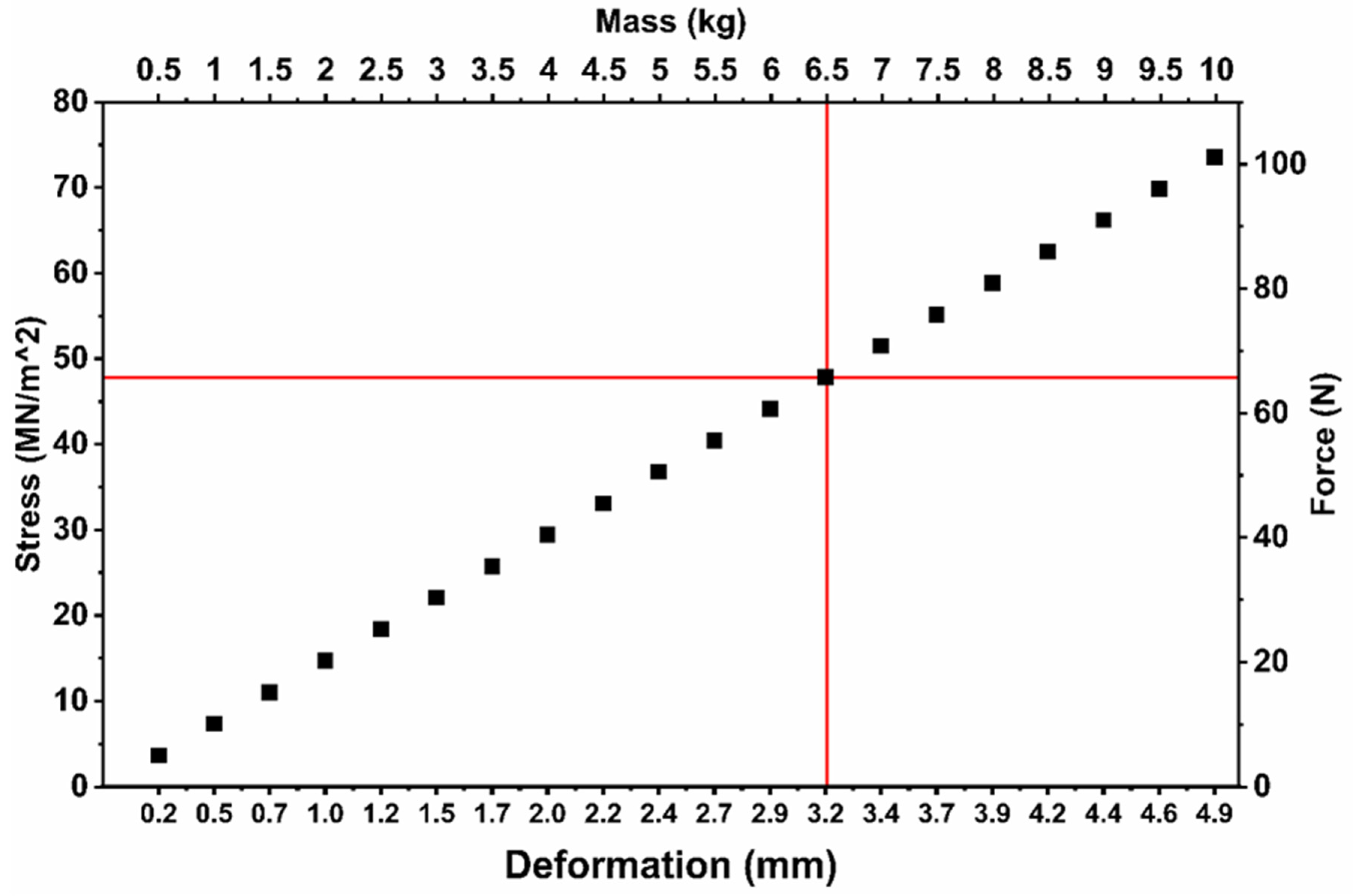
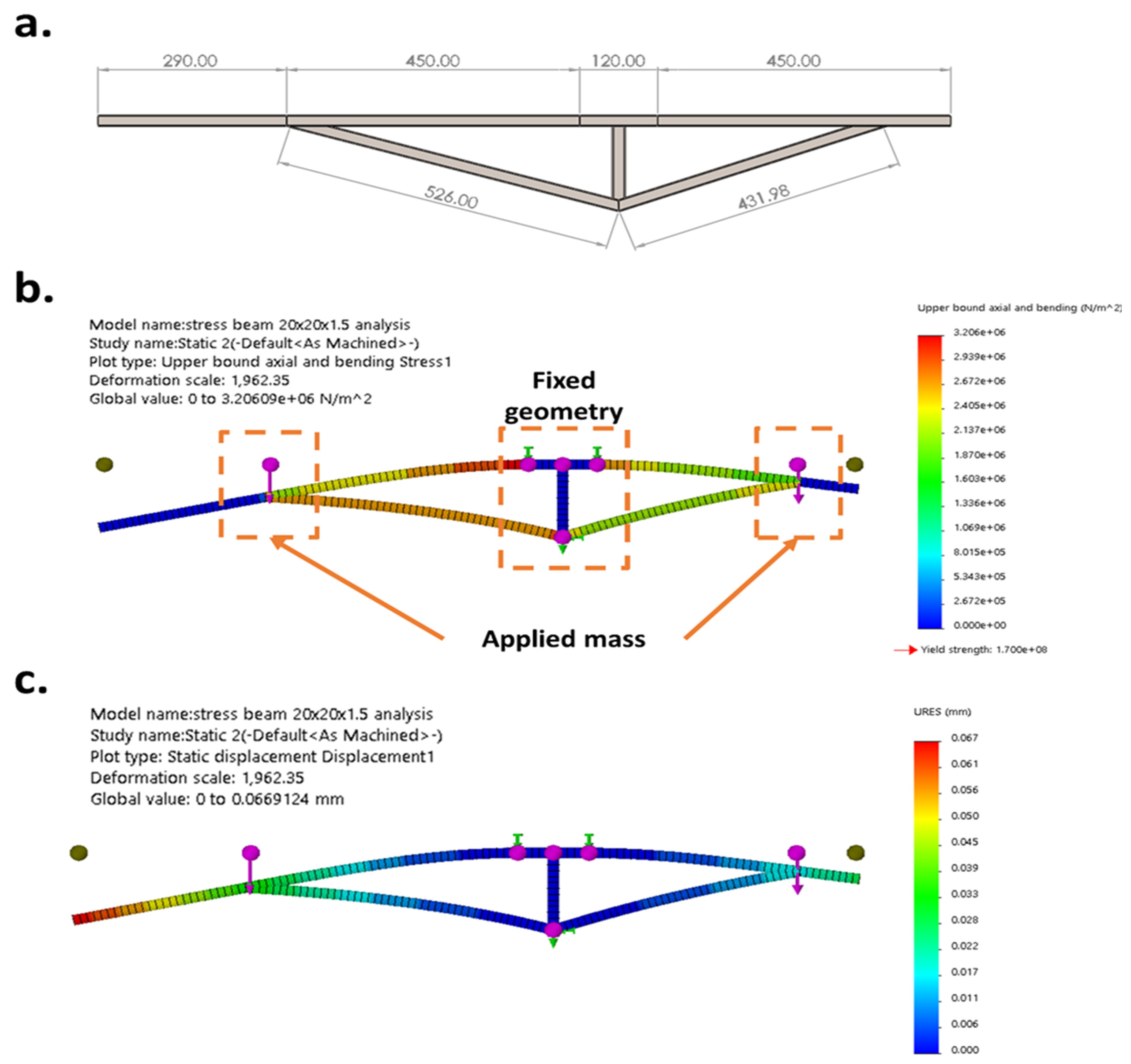
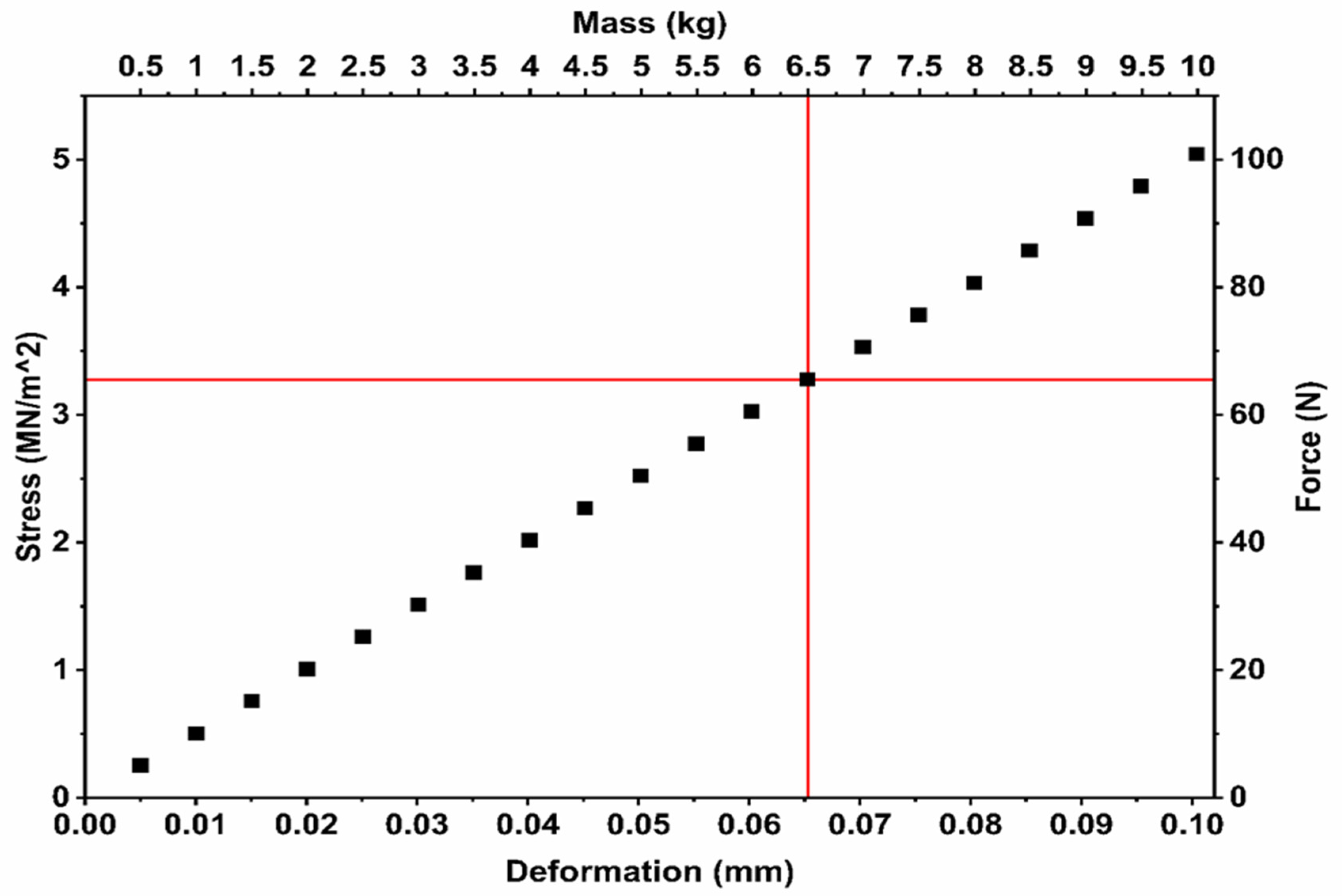
6.1. Interlink Mechanical Structure—Beam Analysis
6.2. System Component Integration and Spatial Consideration
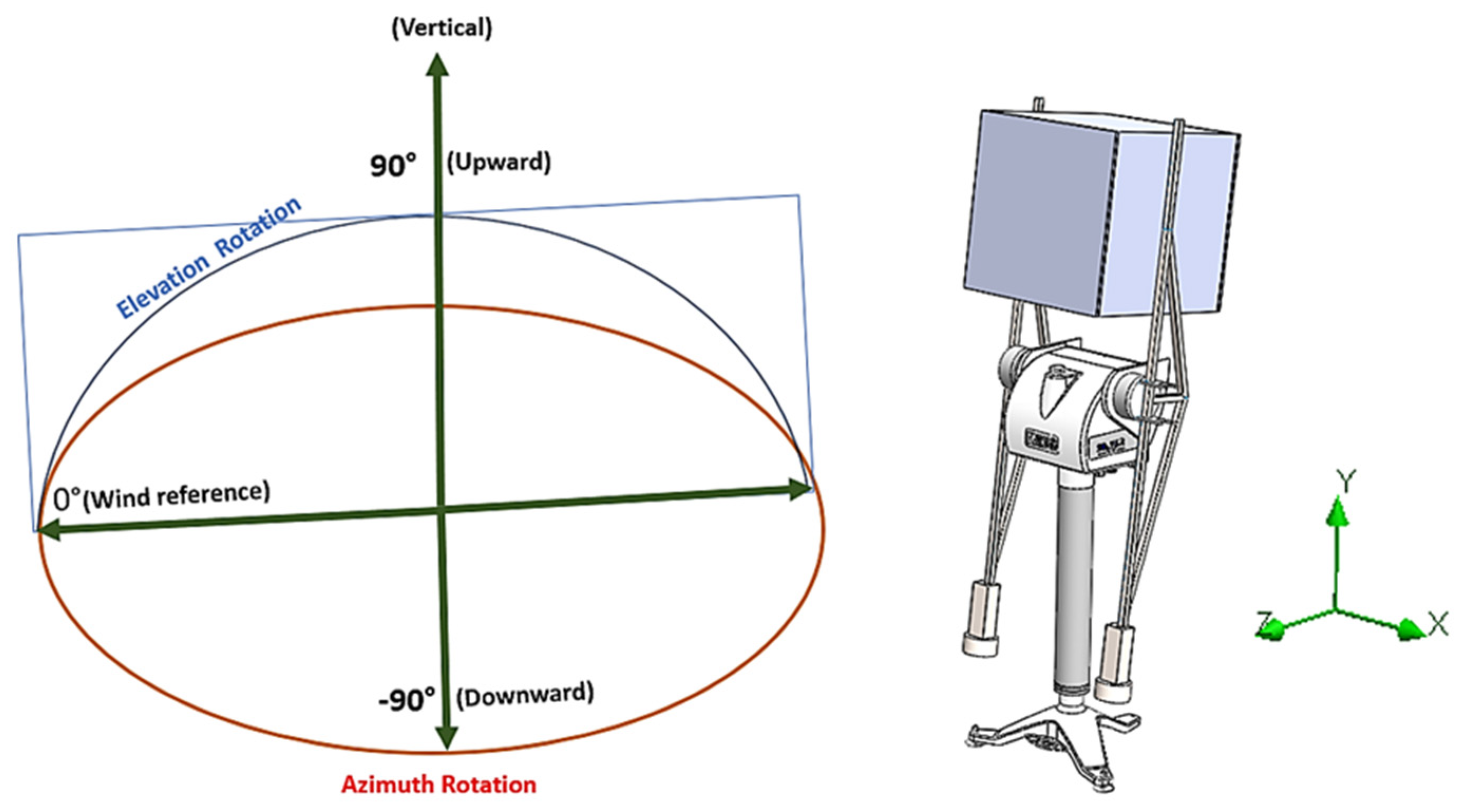
6.3. Impact of Wind Load
- Azimuth angle (0–360°): This angle represents the horizontal orientation of the assembly relative to the wind direction. An azimuth of 0° means the wind strikes the front face directly, 90° strikes the side, 180° the rear, and 270° the opposite side.
- Elevation angle (−90° to +90°): This angle represents the vertical tilt of the assembly relative to the ground. An elevation of 0° indicates a horizontal (flat) position, +90° is vertical facing upward, and −90° is vertical facing downward.
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Shanks, K.; Senthilarasu, S.; Mallick, T.K. Optics for Concentrating Photovoltaics: Trends, Limits and Opportunities for Materials and Design. Renew. Sustain. Energy Rev. 2016, 60, 394–407. [Google Scholar] [CrossRef]
- Lovegrove, K.; Burgess, G.; Pye, J. A New 500 m 2 Paraboloidal Dish Solar Concentrator. Sol. Energy 2011, 85, 620–626. [Google Scholar] [CrossRef]
- Schmitz, M.; Wiik, N.; Ambrosetti, G.; Pedretti, A.; Paredes, S.; Ruch, P.; Michel, B.; Steinfeld, A. A 6-Focus High-Concentration Photovoltaic-Thermal Dish System. Sol. Energy 2017, 155, 445–463. [Google Scholar] [CrossRef]
- Ferrer-Rodríguez, J.P.; Saura, J.M.; Fernández, E.F.; Almonacid, F.; Talavera, D.L.; Pérez-Higueras, P. Exploring Ultra-High Concentrator Photovoltaic Cassegrain-Koehler-Based Designs up to 6000×. Opt Express 2020, 28, 6609. [Google Scholar] [CrossRef]
- Ferrer-Rodríguez, J.P.; Fernández, E.F.; Almonacid, F.; Pérez-Higueras, P. Optical Design of a 4-off-Axis-Unit Cassegrain Ultra-High Concentrator Photovoltaics Module with a Central Receiver. Opt. Lett. 2016, 41, 1985. [Google Scholar] [CrossRef]
- Jacob, J.; Pandey, A.K.; Abd Rahim, N.; Selvaraj, J.; Samykano, M.; Saidur, R.; Tyagi, V.V. Concentrated Photovoltaic Thermal (CPVT) Systems: Recent Advancements in Clean Energy Applications, Thermal Management and Storage. J. Energy Storage 2022, 45, 103369. [Google Scholar] [CrossRef]
- Khelifa, A.; Abdelgaied, M.; Harby, K.; Attia, M.E.H. Performance Improvement of Photovoltaic/Thermal Collectors Based on the Optimized Design of Efficient Innovative Multiple-Impinging Slot Jets. Sol. Energy 2024, 283, 112992. [Google Scholar] [CrossRef]
- Iqbal, W.; Ullah, I.; Shin, S. Optical Developments in Concentrator Photovoltaic Systems—A Review. Sustainability 2023, 15, 10554. [Google Scholar] [CrossRef]
- Ceballos, M.A.; Pérez-Higueras, P.J.; Fernández, E.F.; Almonacid, F. Tracking-Integrated CPV Technology: State-of-the-Art and Classification. Energies 2023, 16, 5605. [Google Scholar] [CrossRef]
- Abo-Zahhad, E.M.; Haridy, S.; Radwan, A.; El-Sharkawy, I.I.; Esmail, M.F.C. Thermal Management of Ultra High Concentrator Photovoltaic Cells: Analysing the Impact of Sintered Porous Media Microchannel Heat Sinks. J. Clean. Prod. 2024, 465, 142649. [Google Scholar] [CrossRef]
- Tang, J.; Li, X.; Hu, R.; Mo, Z.; Du, M. A Novel Designed Manifold Ultrathin Micro Pin-Fin Channel for Thermal Management of High-Concentrator Photovoltaic System. Int. J. Heat. Mass. Transf. 2022, 183, 122094. [Google Scholar] [CrossRef]
- Elqady, H.I.; Radwan, A.; Ali, A.Y.M.; Rabie, M.; Abo-Zahhad, E.M.; Ookawara, S.; Elkady, M.F.; El-Shazly, A.H. Concentrator Photovoltaic Thermal Management Using a New Design of Double-Layer Microchannel Heat Sink. Sol. Energy 2021, 220, 552–570. [Google Scholar] [CrossRef]
- Tan, W.-C.; Chong, K.-K.; Tan, M.-H. Performance Study of Water-Cooled Multiple-Channel Heat Sinks in the Application of Ultra-High Concentrator Photovoltaic System. Sol. Energy 2017, 147, 314–327. [Google Scholar] [CrossRef]
- Sajid, M.U.; Abedrabboh, O.; Bicer, Y. Performance Evaluation of Interrupted and Hybrid Channel Heat Sinks for a Triple Junction High Concentrator Photovoltaic Cell. Int. J. Thermofluids 2025, 26, 101102. [Google Scholar] [CrossRef]
- Valera, Á.; Rodrigo, P.M.; Ceballos, M.A.; Almonacid, F.; Fernández, E.F. Design, Manufacturing and Indoor/Outdoor Testing of a Hybrid Thermoelectric-Concentrator Photovoltaic Mono-Module at Unprecedented Ultra-High Concentration Levels. Sol. Energy Mater. Sol. Cells 2023, 254, 112269. [Google Scholar] [CrossRef]
- Micheli, L.; Sarmah, N.; Luo, X.; Reddy, K.S.; Mallick, T.K. Design and Production of a 2.5 KWe Insulated Metal Substrate-Based Densely Packed CPV Assembly. In Proceedings of the AIP Conference Proceedings, New Orleans, LA, USA, 26 September 2014; American Institute of Physics Inc.: Washington, DC, USA, 2014; Volume 1616, pp. 196–199. [Google Scholar]
- Awasthi, A.; Kumar, A.; SR, M.M.; Dondariya, C.; Shukla, K.N.; Porwal, D.; Richhariya, G. Review on Sun Tracking Technology in Solar PV System. Energy Rep. 2020, 6, 392–405. [Google Scholar] [CrossRef]
- Singh, R.; Kumar, S.; Gehlot, A.; Pachauri, R. An Imperative Role of Sun Trackers in Photovoltaic Technology: A Review. Renew. Sustain. Energy Rev. 2018, 82, 3263–3278. [Google Scholar] [CrossRef]
- Orynbassar, S.; Almen, D.; Mekhilef, S.; Kapparova, A.; Dosymbetova, G.; Nurgaliyev, M.; Saymbetov, A.; Ibraimov, M.; Kuttybay, N.; Yershov, E. Minimum Solar Tracking System for a Fresnel Lens-Based LCPV. Renew. Energy 2024, 237, 121607. [Google Scholar] [CrossRef]
- Paliyal, P.S.; Mondal, S.; Layek, S.; Kuchhal, P.; Pandey, J.K. Automatic Solar Tracking System: A Review Pertaining to Advancements and Challenges in the Current Scenario. Clean. Energy 2024, 8, 237–262. [Google Scholar] [CrossRef]
- Kuttybay, N.; Mekhilef, S.; Koshkarbay, N.; Saymbetov, A.; Nurgaliyev, M.; Dosymbetova, G.; Orynbassar, S.; Yershov, E.; Kapparova, A.; Zholamanov, B. Assessment of Solar Tracking Systems: A Comprehensive Review. Sustain. Energy Technol. Assess. 2024, 68, 103879. [Google Scholar] [CrossRef]
- Maka, A.O.M.; O’Donovan, T.S. A Review of Thermal Load and Performance Characterisation of a High Concentrating Photovoltaic (HCPV) Solar Receiver Assembly. Sol. Energy 2020, 206, 35–51. [Google Scholar] [CrossRef]
- Ceballos, M.A.; Fernández, E.F.; Rodrigo, P.M.; Valera, Á.; Pérez-Higueras, P.J.; Almonacid, F. High-Performance 4096× Ultra-High CPV Module Based on Multiple Concentrator Units and Optical Guides. Opt. Lett. 2021, 46, 4188–4191. [Google Scholar] [CrossRef] [PubMed]
- Alzahrani, M.; Ahmed, A.; Shanks, K.; Sundaram, S.; Mallick, T. Optical Component Analysis for Ultrahigh Concentrated Photovoltaic System (UHCPV). Sol. Energy 2021, 227, 321–333. [Google Scholar] [CrossRef]
- Alzahrani, M.M.; Shanks, K.; Chanchangi, Y.; Cameron, W.J.; Maatallah, T.S.; Mallick, T.K. Record High Solar Concentration Ratio for Photovoltaics: Experimental Validation for Achieving Effective Concentration of >1200 Suns. Sol. Energy 2024, 271, 112427. [Google Scholar] [CrossRef]
- Cameron, W.J.; Alzahrani, M.M.; Yule, J.; Shanks, K.; Reddy, K.S.; Mallick, T.K. Indoor Experimental Analysis of Serpentine-Based Cooling Scheme for High Concentration Photovoltaic Thermal Systems. Appl. Therm. Eng. 2023, 234, 121183. [Google Scholar] [CrossRef]
- Cameron, W.J.; Alzahrani, M.; Shanks, K.; Mallick, T.K.; Reddy, K.S. Optical Losses and Durability of 4-Domed Optic for Concentrator Photovoltaics; University of Exeter: Exeter, UK, 2022. [Google Scholar]
- Yang, S.-Y.; Leng, Y.-K.; Cheng, Z.-D.; Wang, W.-Q.; He, Y.-L. Optical-Thermal–Mechanical Comprehensive Performance of the Concentrating and Collecting Subsystem for the next-Generation Solar Power Tower Based on Heliostat Field Layouts Optimization. Sol. Energy 2024, 275, 112604. [Google Scholar] [CrossRef]
- Cappelletti, A.; Nelli, L.C.; Reatti, A. Integration and Architectural Issues of a Photovoltaic/Thermal Linear Solar Concentrator. Sol. Energy 2018, 169, 362–373. [Google Scholar] [CrossRef]
- KJN. Aluminium Profile. Available online: https://www.aluminium-profile.co.uk/ (accessed on 18 February 2025).
- Laser Cutting Subcontractor-Southern England & Wales-Laser Industries. Available online: https://www.laser.co.uk/ (accessed on 18 February 2025).
- Industrial Solutions & Electrical Components|RS. Available online: https://uk.rs-online.com/web/ (accessed on 18 February 2025).
- ORAFOL. Fresnel Optics GmbH. Available online: https://www.orafol.com/en/ (accessed on 10 March 2022).
- Cornwall Glass Comapny_Penryn. Available online: https://cornwallglass.co.uk/your-branch/penryn/ (accessed on 10 March 2022).
- Kipp & ZONEN. Instruction Manual: SOLYS2 & SOLYS Gear Drive; Kipp & ZONEN: Delft, The Netherlands, 2003. [Google Scholar]
- Kipp & ZONEN. Available online: https://www.kippzonen.com/ (accessed on 11 April 2021).






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Optical Stage | Optical Efficiency (%) |
|---|---|
| Fresnel lens | 91.11 |
| Fresnel lens + secondary stage optic | 73.33 |
| Fresnel lens + secondary stage optic + tertiary optic | 59.07 |
| Sun Tracker Model | SOLYS2 | SOLYS Gear Drive (GD) |
|---|---|---|
| Pointing/tracking accuracy | <0.1° (passive) <0.02° (active) | <0.1° (passive) <0.02° (active) |
| Torque | 20 Nm | 60 Nm |
| Payload (counterbalance) | 20 kg | 80 kg |
| System weight | 28 kg (sun tracker with tripod) | 26 kg (only sun tracker) |
| Tripod | Included | Not included (tripod of SOLYS2 can be used with a limit (no more than 50 kg)) |
| Transmission system | Inverted tooth belts | High-precision reduction gear |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Maatallah, T.; Alzahrani, M.; Cameron, W.; Shanks, K.; Alimi, S.E.; Mallick, T.K.; Ali, S. Structural Analysis of a Modular High-Concentration PV System Operating at ~1200 Suns. Machines 2025, 13, 468. https://doi.org/10.3390/machines13060468
Maatallah T, Alzahrani M, Cameron W, Shanks K, Alimi SE, Mallick TK, Ali S. Structural Analysis of a Modular High-Concentration PV System Operating at ~1200 Suns. Machines. 2025; 13(6):468. https://doi.org/10.3390/machines13060468
Chicago/Turabian StyleMaatallah, Taher, Mussad Alzahrani, William Cameron, Katie Shanks, Souheil El Alimi, Tapas K. Mallick, and Sajid Ali. 2025. "Structural Analysis of a Modular High-Concentration PV System Operating at ~1200 Suns" Machines 13, no. 6: 468. https://doi.org/10.3390/machines13060468
APA StyleMaatallah, T., Alzahrani, M., Cameron, W., Shanks, K., Alimi, S. E., Mallick, T. K., & Ali, S. (2025). Structural Analysis of a Modular High-Concentration PV System Operating at ~1200 Suns. Machines, 13(6), 468. https://doi.org/10.3390/machines13060468