



Efficient and Explainable Bearing Condition Monitoring with Decision Tree-Based Feature Learning

 , , and
, , and
Abstract
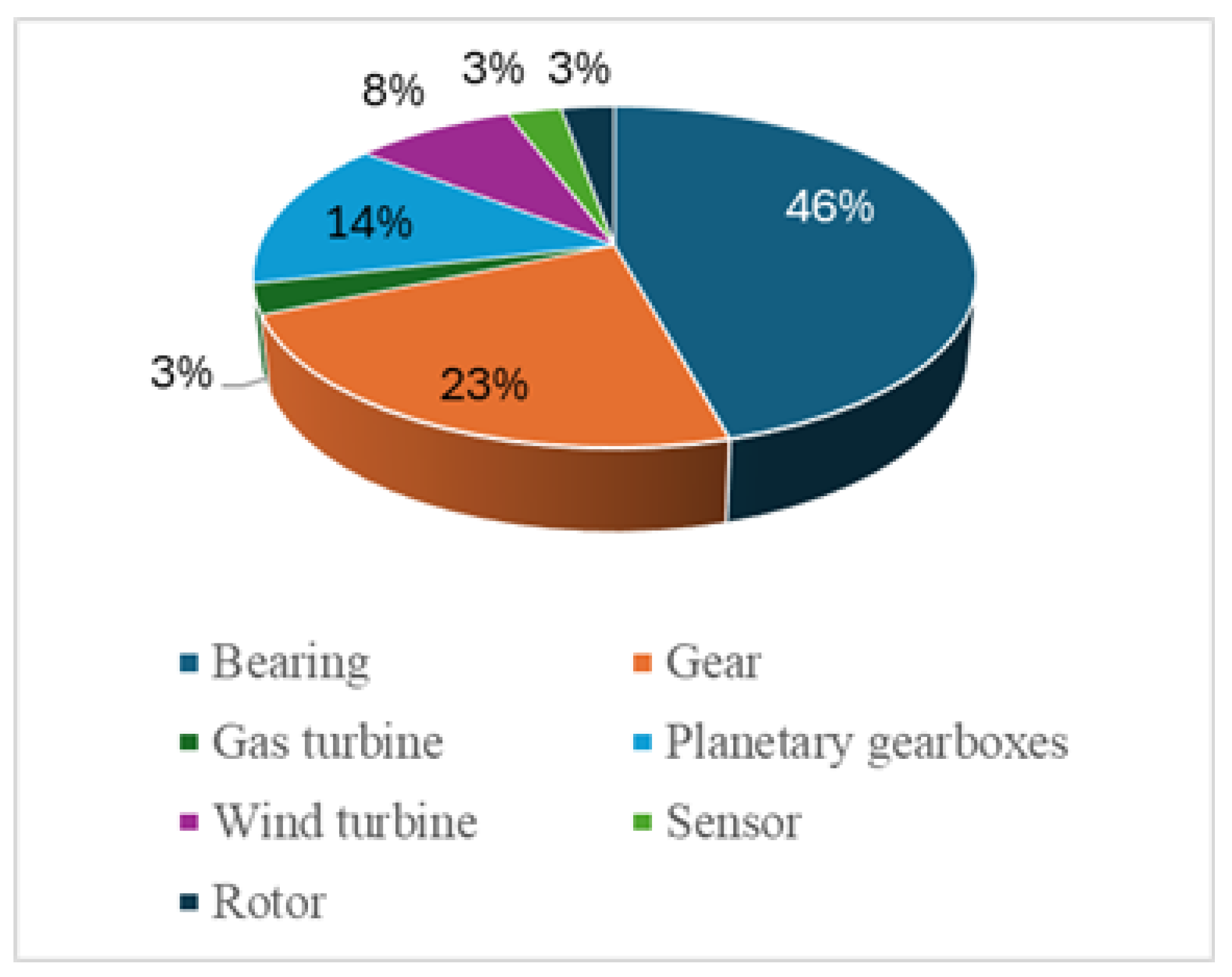
1. Introduction
2. Methodology
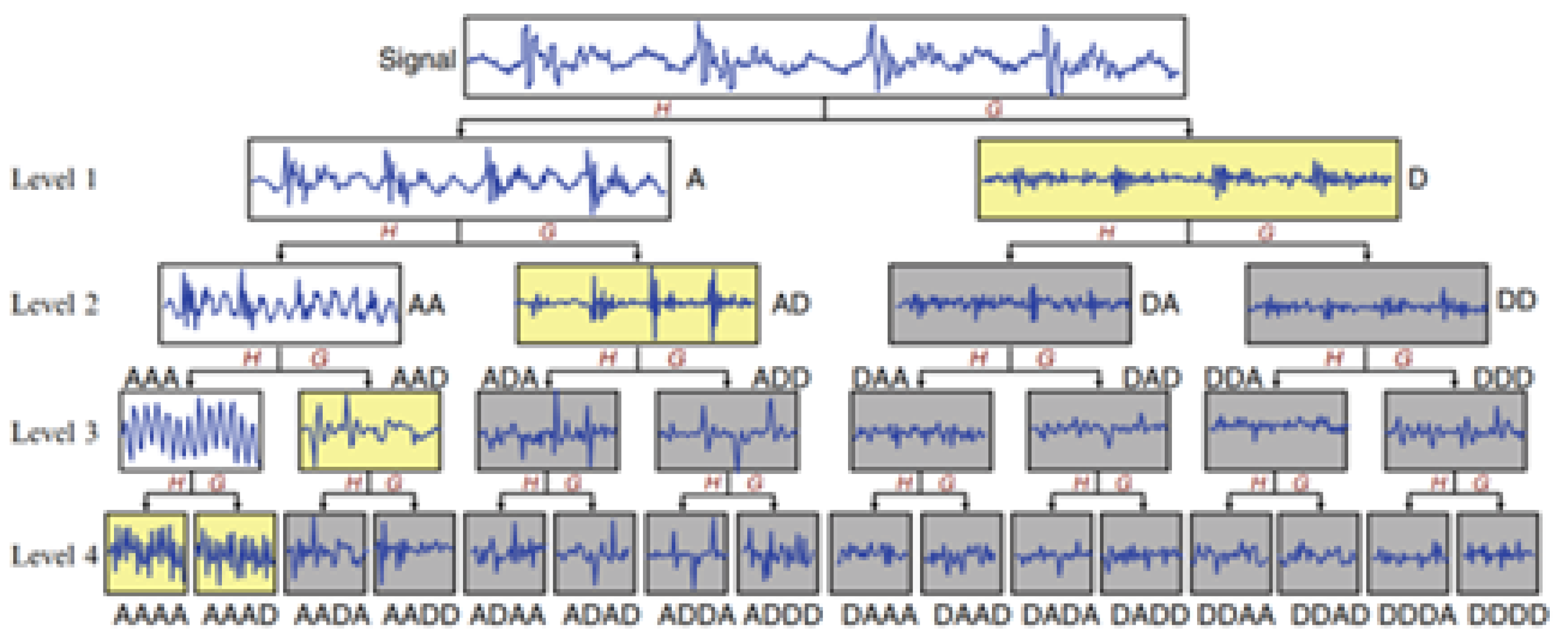
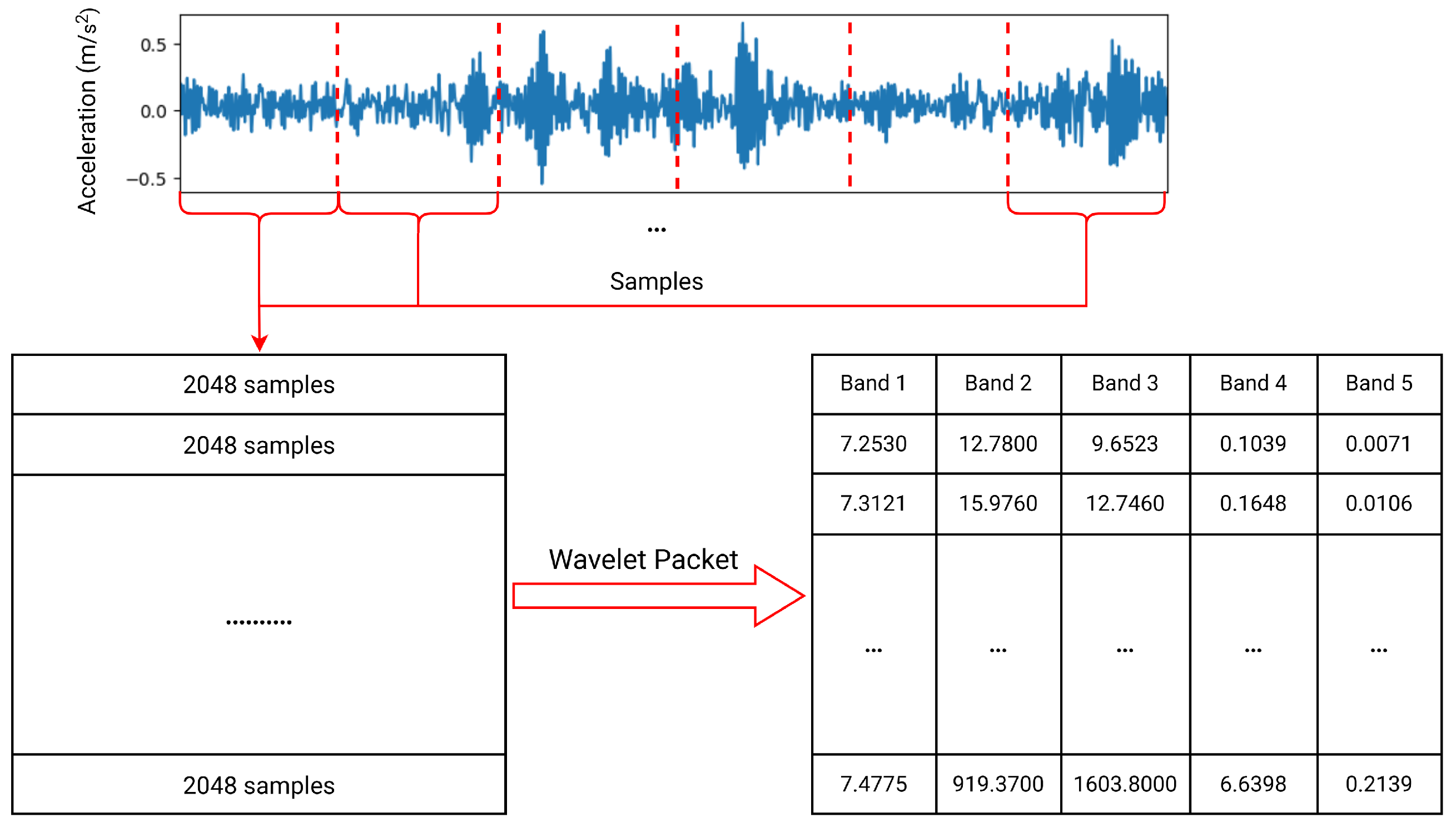
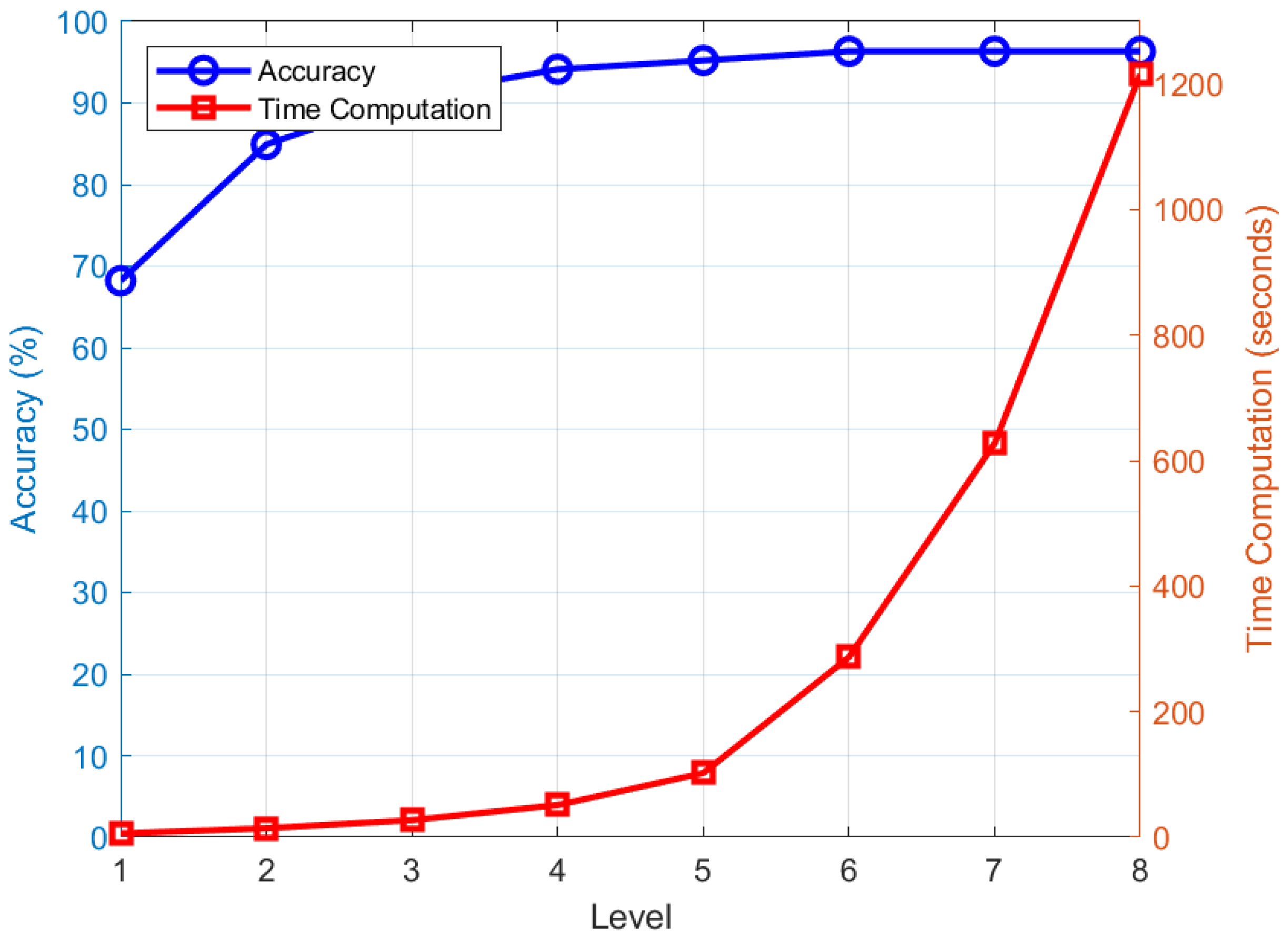
2.1. Wavelet Packet Transfrom
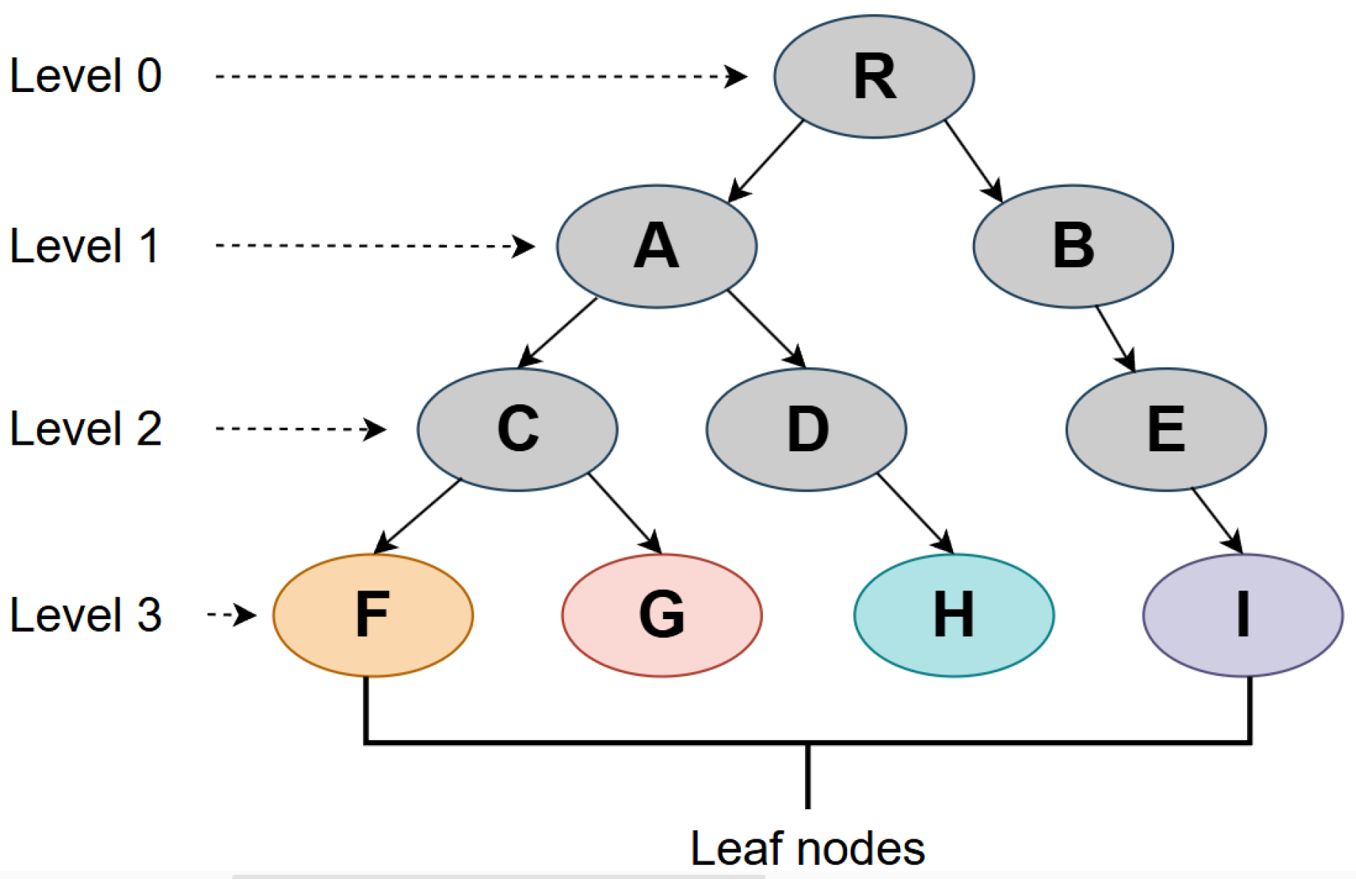
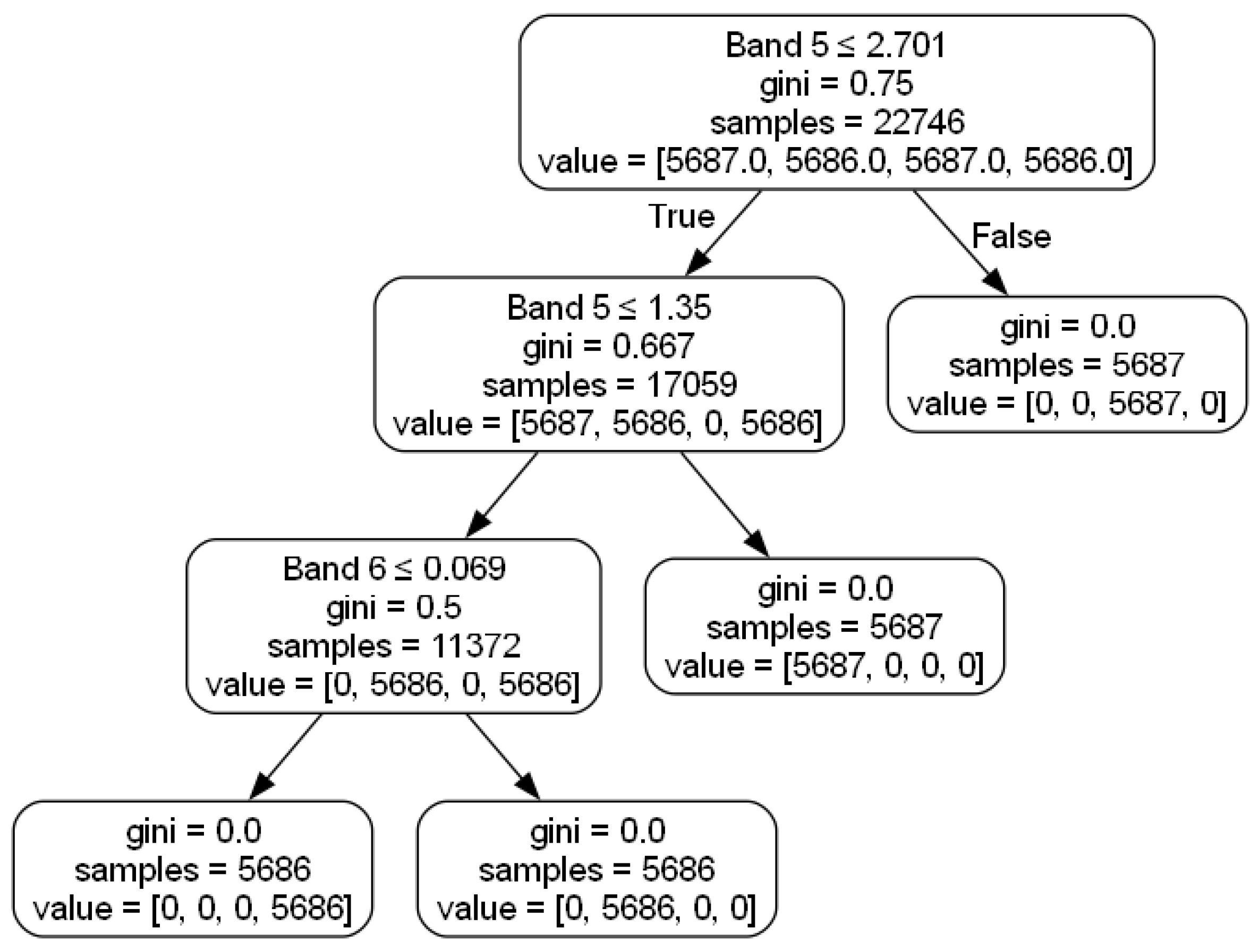
2.2. Decision Tree
- -
- is the proportion of samples belonging to class i in the dataset D.
- -
- c is the total number of classes (four classes in this study: normal, outer race fault, inner race fault, and ball fault).
- -
- D is the original dataset at the node.
- -
- and are the left and right child nodes after the split, respectively.
- -
- , and represent the number of samples in each respective dataset.
- -
- All samples within a node belong to the same class.
- -
- The number of samples in a node falls below a minimum threshold (typically set to 2 by default in scikit-learn).
- -
- The maximum allowable tree depth is reached.
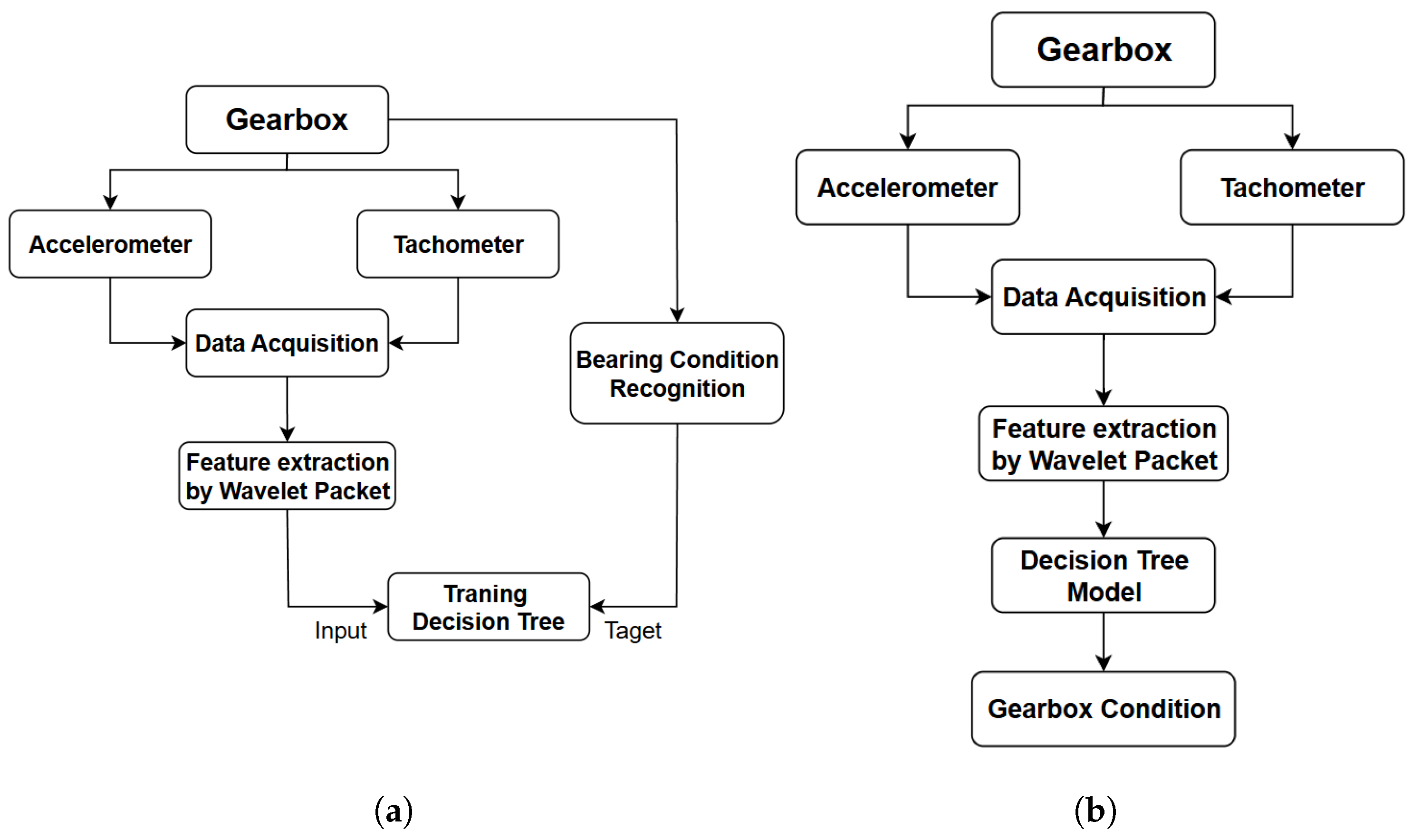
2.3. Implementation Process Diagram
3. Experimental Test
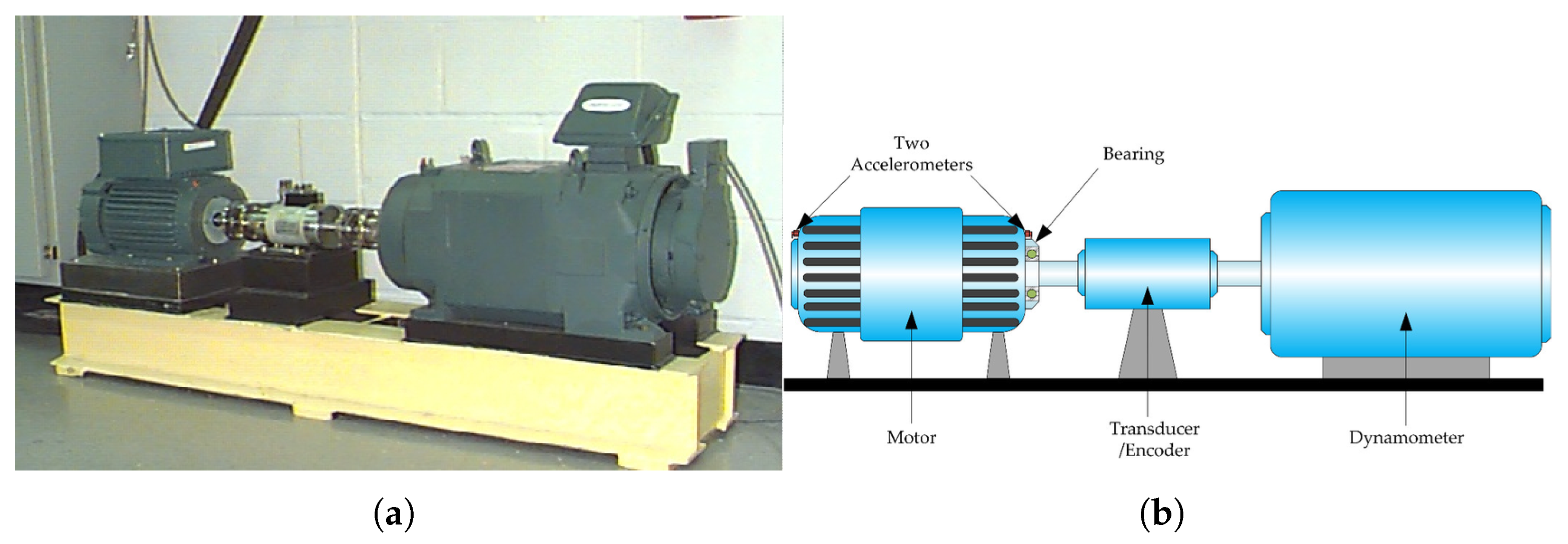
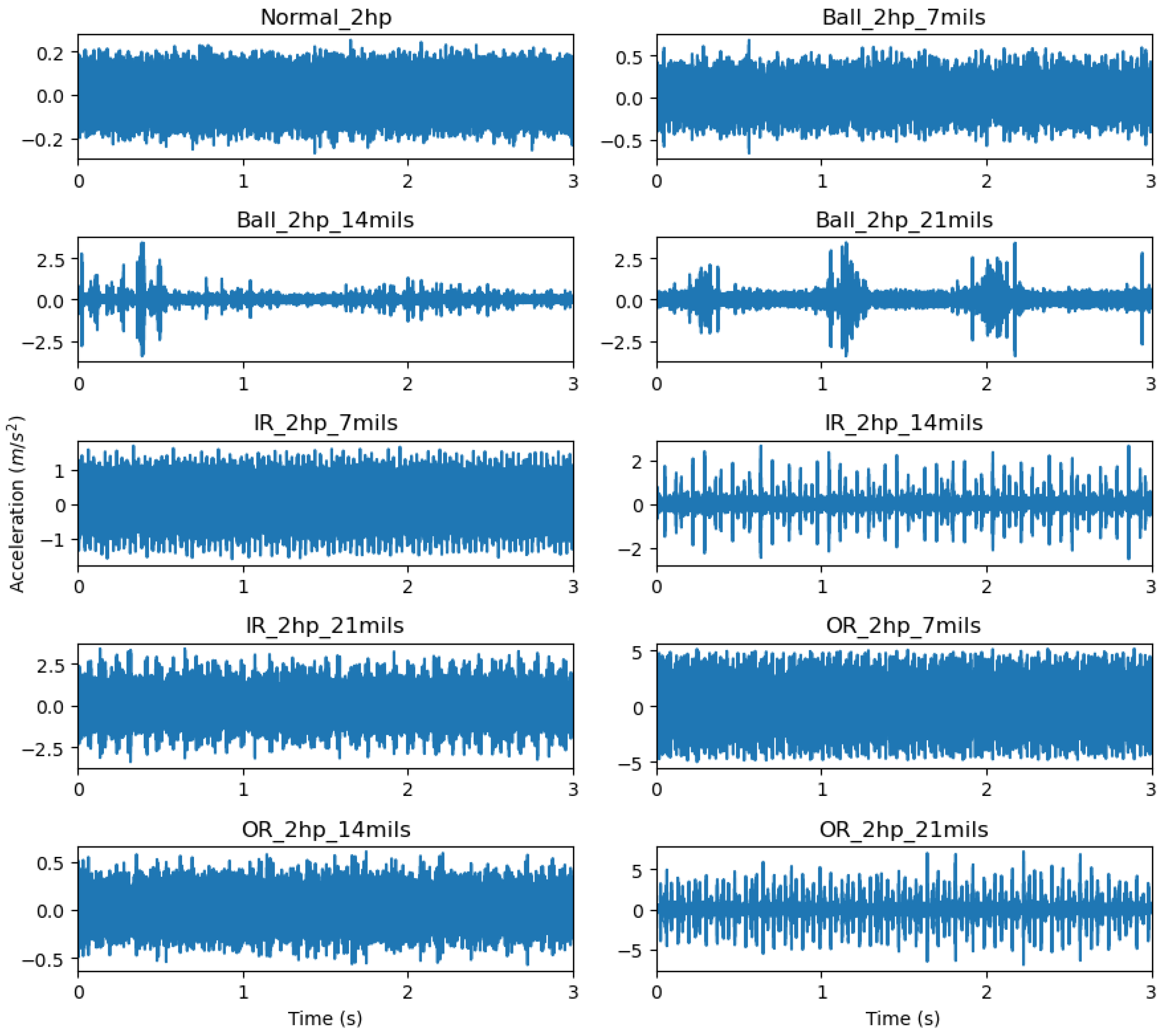
3.1. Experimental Setup and Dataset
3.2. Training Process
3.2.1. Signal Preprocessing
3.2.2. Splitting Data
- Training set: Contains the majority of the data and is used to train the decision tree model. The model learns patterns and relationships from these data to make predictions.
- Validation set: This set is used to adjust the hyperparameters of the model during the training process. Using a validation set helps prevent overfitting, which is when the model learns the training data too well and cannot generalize well to new data.
- Test set: This set is a separate dataset that the model has never seen during training. It is used to evaluate the final performance of the model after it has been trained and optimized.
3.3. Result and Discussion
3.3.1. Model Training
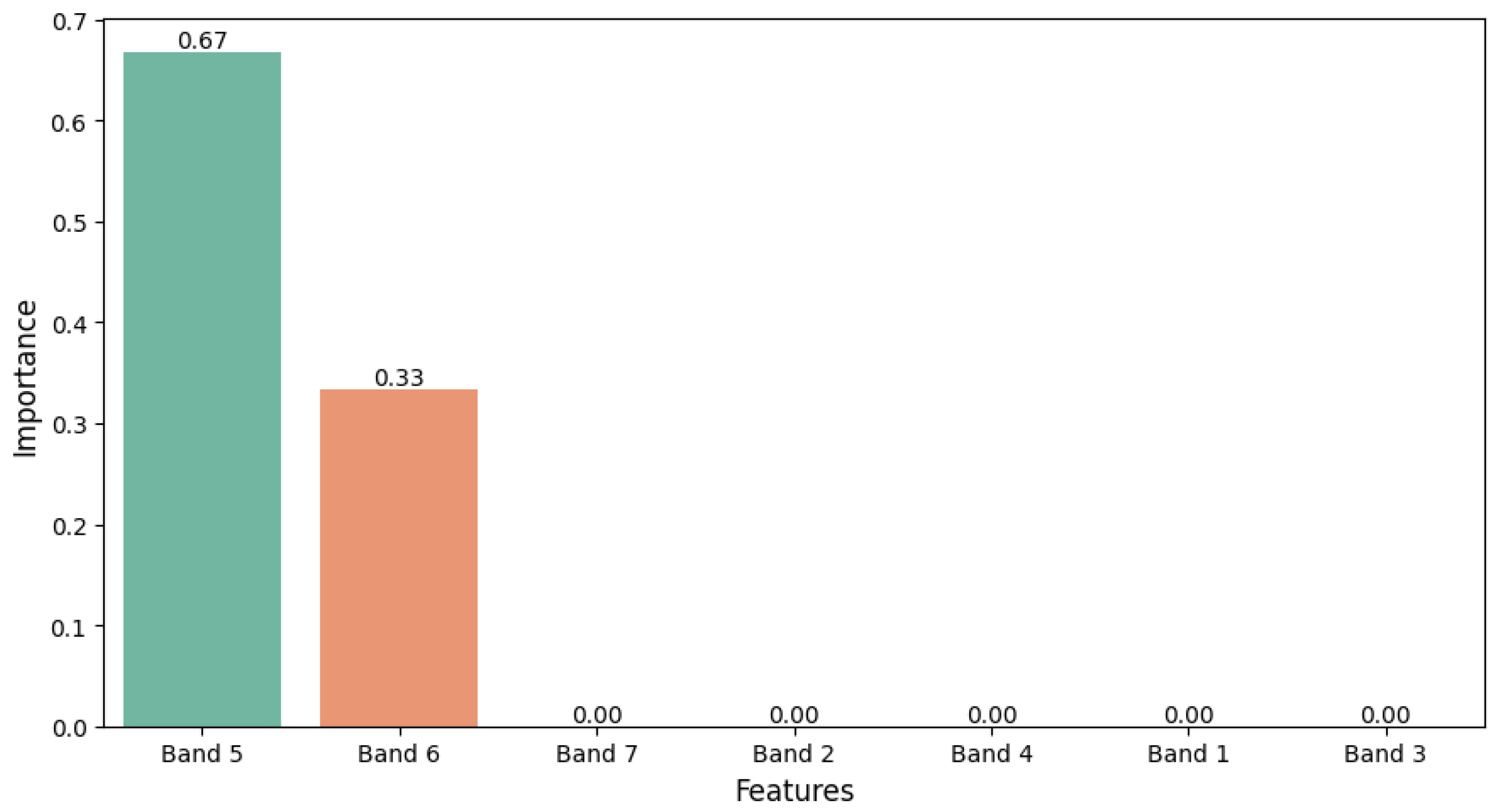
3.3.2. Result Analysis
3.3.3. Comparative Evaluation
3.4. Validation on an Independent Dataset
3.4.1. Experimental Setup and Data Processing
3.4.2. Results and Analysis
4. Conclusions and Future Work
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Wu, F.; Xiang, Z.; Xiao, D.; Hao, Y.; Qin, Y.; Pu, H.; Luo, J. Adversarial-Causal Representation Learning Networks for Machine fault diagnosis under unseen conditions based on vibration and acoustic signals. Eng. Appl. Artif. Intell. 2025, 139, 109550. [Google Scholar] [CrossRef]
- Pang, B.; Liu, Q.; Xu, Z.; Sun, Z.; Hao, Z.; Song, Z. Fault vibration model driven fault-aware domain generalization framework for bearing fault diagnosis. Adv. Eng. Inform. 2024, 62, 102620. [Google Scholar] [CrossRef]
- Feng, K.; Xiao, Y.; Li, Z.; Jiang, Z.; Gu, F. Gas turbine blade fracturing fault diagnosis based on broadband casing vibration. Measurement 2023, 214, 112718. [Google Scholar] [CrossRef]
- Jiang, F.; Lin, W.; Wu, Z.; Zhang, S.; Chen, Z.; Li, W. Fault diagnosis of gearbox driven by vibration response mechanism and enhanced unsupervised domain adaptation. Adv. Eng. Inform. 2024, 61, 102460. [Google Scholar] [CrossRef]
- Zhang, L.; He, X.; Chen, J.; Liu, J. Fault diagnoses of a nonlinear cracked rotor-bearing system based on vibration energy space and incremental learning approach. J. Sound Vib. 2025, 600, 118785. [Google Scholar] [CrossRef]
- Hu, W.; Xin, G.; Wu, J.; An, G.; Li, Y.; Feng, K.; Antoni, J. Vibration-based bearing fault diagnosis of high-speed trains: A literature review. High-Speed Railw. 2023, 1, 219–223. [Google Scholar] [CrossRef]
- Zheng, Z.; Song, D.; Zhang, W.; Jia, C. A fault diagnosis method for bogie axle box bearing based on sound-vibration multiple signal fusion. Appl. Acoust. 2025, 228, 110336. [Google Scholar] [CrossRef]
- Du, N.T.; Trung, P.T.; Cuong, N.H.; Dien, N.P. Automatic Rolling Bearings Fault Classification: A Case Study at Varying Speed Conditions. Front. Mech. Eng. 2024, 10, 1341466. [Google Scholar] [CrossRef]
- Kecik, K.; Smagala, A.; Ciecieląg, K. Diagnosis of angular contact ball bearing defects based on recurrence diagrams and quantification analysis of vibration signals. Measurement 2023, 216, 112963. [Google Scholar] [CrossRef]
- Hong, D.; Kim, B. 1D convolutional neural network-based adaptive algorithm structure with system fault diagnosis and signal feature extraction for noise and vibration enhancement in mechanical systems. Mech. Syst. Signal Process. 2023, 197, 110395. [Google Scholar] [CrossRef]
- Cao, W.; Han, Z.; Yang, Z.Z.; Wang, N.; Qu, J.X.; Wang, D. Deterioration state diagnosis and wear evolution evaluation of planetary gearbox using vibration and wear debris analysis. Measurement 2022, 193, 110978. [Google Scholar] [CrossRef]
- Liu, J.; Hao, R.; Zhang, T.; Wang, X. Vibration fault diagnosis based on stochastic configuration neural networks. Neurocomputing 2021, 434, 98–125. [Google Scholar] [CrossRef]
- Wang, S.; Wang, Q.; Xiao, Y.; Liu, W.; Shang, M. Research on rotor system fault diagnosis method based on vibration signal feature vector transfer learning. Eng. Fail. Anal. 2022, 139, 106424. [Google Scholar] [CrossRef]
- Jha, R.K.; Swami, P.D. Fault diagnosis and severity analysis of rolling bearings using vibration image texture enhancement and multiclass support vector machines. Appl. Acoust. 2021, 182, 108243. [Google Scholar] [CrossRef]
- Ye, Z.; Yu, J. Deep morphological convolutional network for feature learning of vibration signals and its applications to gearbox fault diagnosis. Mech. Syst. Signal Process. 2021, 161, 107984. [Google Scholar] [CrossRef]
- Liu, S.; Fang, L.; Wang, X.Z.S.; Hu, C.; Gu, F.; Ball, A. State-of-health estimation of lithium-ion batteries using a kernel support vector machine tuned by a new nonlinear gray wolf algorithm. J. Energy Storage 2024, 102, 114052. [Google Scholar] [CrossRef]
- Jiang, M.; Luo, M.; Zhang, C.; Shu, M.; Sun, G. Rolling bearing fault diagnosis based on acoustic-vibration data fusion and mode decomposition combined with the crested porcupine optimization algorithm. Heliyon 2024, 10, e40351. [Google Scholar] [CrossRef] [PubMed]
- Thuan, N.D.; Hong, H.S. HUST bearing: A practical dataset for ball bearing fault diagnosis. BMC Res. Notes 2023, 16, 138. [Google Scholar] [CrossRef]
- Yu, X.; Feng, Z.; Liang, M. Analytical vibration signal model and signature analysis in resonance region for planetary gearbox fault diagnosis. J. Sound Vib. 2021, 498, 115962. [Google Scholar] [CrossRef]
- Jiang, G.; Jia, C.; Nie, S.; Wu, X.; He, Q.; Xie, P. Multiview enhanced fault diagnosis for wind turbine gearbox bearings with fusion of vibration and current signals. Measurement 2022, 196, 111159. [Google Scholar] [CrossRef]
- He, M.; He, D. A new hybrid deep signal processing approach for bearing fault diagnosis using vibration signals. Neurocomputing 2020, 396, 542–555. [Google Scholar] [CrossRef]
- Wang, R.; Gu, Z.; Wang, C.; Yu, M.; Han, W.; Yu, L. Vibration shock disturbance modeling in the rotating machinery fault diagnosis: A generalized mixture Gaussian model. Mech. Syst. Signal Process. 2024, 220, 111594. [Google Scholar] [CrossRef]
- Sethi, M.R.; Subba, A.B.; Faisal, M.; Sahoo, S.; Raju, D.K. Fault diagnosis of wind turbine blades with continuous wavelet transform based deep learning model using vibration signal. Eng. Appl. Artif. Intell. 2024, 138, 109372. [Google Scholar] [CrossRef]
- Chen, T.; Guo, L.; Feng, T.; Gao, H.; Yu, Y. IESMGCFFOgram: A new method for multicomponent vibration signal demodulation and rolling bearing fault diagnosis. Mech. Syst. Signal Process. 2023, 204, 110800. [Google Scholar] [CrossRef]
- Rauber, T.W.; da Silva Loca, A.L.; de Assis Boldt, F.; Rodrigues, A.L.; Varejão, F.M. An experimental methodology to evaluate machine learning methods for fault diagnosis based on vibration signals. Expert Syst. Appl. 2021, 167, 114022. [Google Scholar] [CrossRef]
- Morshedizadeh, M.; Rodgers, M.; Doucette, A.; Schlanbusch, P. A case study of wind turbine rotor over-speed fault diagnosis using combination of SCADA data, vibration analyses and field inspection. Eng. Fail. Anal. 2023, 146, 107056. [Google Scholar] [CrossRef]
- Mongia, C.; Goyal, D.; Sehgal, S. Vibration response-based condition monitoring and fault diagnosis of rotary machinery. Mater. Today Proc. 2022, 50, 679–683. [Google Scholar] [CrossRef]
- Nie, Y.; Li, F.; Wang, L.; Li, J.; Wang, M.; Sun, M.; Li, G.; Li, Y. Phenomenological vibration models of planetary gearboxes for gear local fault diagnosis. Mech. Mach. Theory 2022, 170, 104698. [Google Scholar] [CrossRef]
- Gunasegaran, V.; Muralidharan, V. Fault diagnosis of spur gear system through decision tree algorithm using vibration signal. Mater. Today Proc. 2020, 22, 3232–3239. [Google Scholar] [CrossRef]
- Wang, T.; Han, Q.; Chu, F.; Feng, Z. Vibration based condition monitoring and fault diagnosis of wind turbine planetary gearbox: A review. Mech. Syst. Signal Process. 2019, 126, 662–685. [Google Scholar] [CrossRef]
- Wang, Z.; Shi, D.; Xu, Y.; Zhen, D.; Gu, F.; Ball, A.D. Early rolling bearing fault diagnosis in induction motors based on on-rotor sensing vibrations. Measurement 2023, 222, 113614. [Google Scholar] [CrossRef]
- Xueyi, L.; Jialin, L.; Yongzhi, Q.; David, H. Semi-supervised gear fault diagnosis using raw vibration signal based on deep learning. Chin. J. Aeronaut. 2020, 33, 418–426. [Google Scholar]
- Miao, M.; Sun, Y.; Yu, J. Deep sparse representation network for feature learning of vibration signals and its application in gearbox fault diagnosis. Knowl.-Based Syst. 2022, 240, 108116. [Google Scholar] [CrossRef]
- Tahmasbi, D.; Shirali, H.; Souq, S.S.M.N.; Eslampanah, M. Diagnosis and root cause analysis of bearing failure using vibration analysis techniques. Eng. Fail. Anal. 2024, 158, 107954. [Google Scholar] [CrossRef]
- Zhou, P.; Chen, S.; He, Q.; Wang, D.; Peng, Z. Rotating machinery fault-induced vibration signal modulation effects: A review with mechanisms, extraction methods and applications for diagnosis. Mech. Syst. Signal Process. 2023, 200, 110489. [Google Scholar] [CrossRef]
- Wang, H.; Liu, Z.; Peng, D.; Cheng, Z. Attention-guided joint learning CNN with noise robustness for bearing fault diagnosis and vibration signal denoising. ISA Trans. 2022, 128, 470–484. [Google Scholar] [CrossRef]
- Lydakis, E.; Koss, H.; Brincker, R.; Amador, S.D. Data-driven sensor fault diagnosis for vibration-based structural health monitoring under ambient excitation. Measurement 2024, 237, 115232. [Google Scholar] [CrossRef]
- Trong-Du, N.; Phong-Dien, N. Improvements in the Wavelet Transform and Its Variations: Concepts and Applications in Diagnosing Gearbox in Non-Stationary Conditions. Appl. Sci. 2024, 14, 4642. [Google Scholar]
- Case Western Reserve University Bearing Data Center. Bearing Data Center: Apparatus and Procedures. Available online: https://engineering.case.edu/bearingdatacenter/apparatus-and-procedures (accessed on 27 March 2025).
- Randall, R.B.; Antoni, J. Rolling element bearing diagnostics—A tutorial. Mech. Syst. Signal Process. 2011, 25, 485–520. [Google Scholar] [CrossRef]
- Liu, H.; Wang, X.; Lu, C. Rolling bearing fault diagnosis under variable conditions using Hilbert-Huang transform and singular value decomposition. Mech. Syst. Signal Process. 2019, 125, 485–520. [Google Scholar] [CrossRef]
- Smith, W.A.; Randall, R.B. Rolling element bearing diagnostics using the Case Western Reserve University data: A benchmark study. Mech. Syst. Signal Process. 2015, 64–65, 100–131. [Google Scholar] [CrossRef]
- Junga, W.; Kima, S.H.; Journal, S.H. Vibration, acoustic, temperature, and varying operating conditions for fault diagnosis. Data Brief 2023, 48, 109049. [Google Scholar] [CrossRef] [PubMed]
- Chen, Z.; Huang, H.-Z.; Deng, Z.; Wu, J. Shrinkage mamba relation network with out-of-distribution data augmentation for rotating machinery fault detection and localization under zero-faulty data. Mech. Syst. Signal Process. 2025, 224, 112145. [Google Scholar] [CrossRef]
- Chen, Z.; Wu, J.; Deng, C.; Wang, C.; Wang, Y. Residual deep subdomain adaptation network: A new method for intelligent fault diagnosis of bearings across multiple domains. Mech. Mach. Theory 2022, 169, 104635–104640. [Google Scholar] [CrossRef]
- Chen, Z.; Li, Z.; Wu, J.; Deng, C.; Dai, W. Deep residual shrinkage relation network for anomaly detection of rotating machines. J. Manuf. Syst. 2022, 65, 579–590. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Load (HP) | Speeds (rpm) | Fault Type | Fault Diameters (mils) | Class Label |
|---|---|---|---|---|
| 0 & 1 & 2 & 3 | 1797 & 1772 & 1750 & 1730 | Normal | 0 | N |
| 0 & 1 & 2 & 3 | 1797 & 1772 & 1750 & 1730 | Ball Fault | 7 & 14 &21 | BA |
| 0 & 1 & 2 & 3 | 1797 & 1772 & 1750 & 1730 | Inner Race | 7 & 14 &21 | IR |
| 0 & 1 & 2 & 3 | 1797 & 1772 & 1750 & 1730 | Outer Race | 7 & 14 &21 | OR |
| Model Variation | Accuracy | Precision | Recall | F1-Score | Time Computation (s) |
|---|---|---|---|---|---|
| Decision Tree | 95.83% | 95.84% | 95.83% | 95.83% | 0.5022 |
| SVM | 95.01% | 95.22% | 94.90% | 94.98% | 2.8126 |
| FFW | 86.72% | 87.01% | 86.50% | 86.72% | 69.3481 |
| Fault Type | Class Label | Training (Sample) | Validation (Sample) | Test (Sample) |
|---|---|---|---|---|
| Normal | N | 513 | 73 | 242 |
| Ball Fault | BA | 1545 | 221 | 728 |
| Inner Race | IR | 1491 | 213 | 702 |
| Outer Race | OR | 1546 | 221 | 728 |
| Load (HP) | Speed (rpm) | Fault Type | Class Label |
|---|---|---|---|
| 0 | 3010 | Normal | N |
| 0 | 3010 | Ball Fault | BA |
| 0 | 3010 | Inner Race | IR |
| 0 | 3010 | Outer Race | OR |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nguyen, T.-D.; Nguyen, T.-H.; Do, D.-T.-B.; Pham, T.-H.; Liang, J.-W.; Nguyen, P.-D. Efficient and Explainable Bearing Condition Monitoring with Decision Tree-Based Feature Learning. Machines 2025, 13, 467. https://doi.org/10.3390/machines13060467
Nguyen T-D, Nguyen T-H, Do D-T-B, Pham T-H, Liang J-W, Nguyen P-D. Efficient and Explainable Bearing Condition Monitoring with Decision Tree-Based Feature Learning. Machines. 2025; 13(6):467. https://doi.org/10.3390/machines13060467
Chicago/Turabian StyleNguyen, Trong-Du, Thanh-Hai Nguyen, Danh-Thanh-Binh Do, Thai-Hung Pham, Jin-Wei Liang, and Phong-Dien Nguyen. 2025. "Efficient and Explainable Bearing Condition Monitoring with Decision Tree-Based Feature Learning" Machines 13, no. 6: 467. https://doi.org/10.3390/machines13060467
APA StyleNguyen, T.-D., Nguyen, T.-H., Do, D.-T.-B., Pham, T.-H., Liang, J.-W., & Nguyen, P.-D. (2025). Efficient and Explainable Bearing Condition Monitoring with Decision Tree-Based Feature Learning. Machines, 13(6), 467. https://doi.org/10.3390/machines13060467