
Trajectory Tracking and Driving Torque Distribution Strategy for Four-Steering-Wheel Heavy-Duty Automated Guided Vehicles


Abstract
1. Introduction
2. Four-Steering-Wheel Heavy-Duty AGV Platform
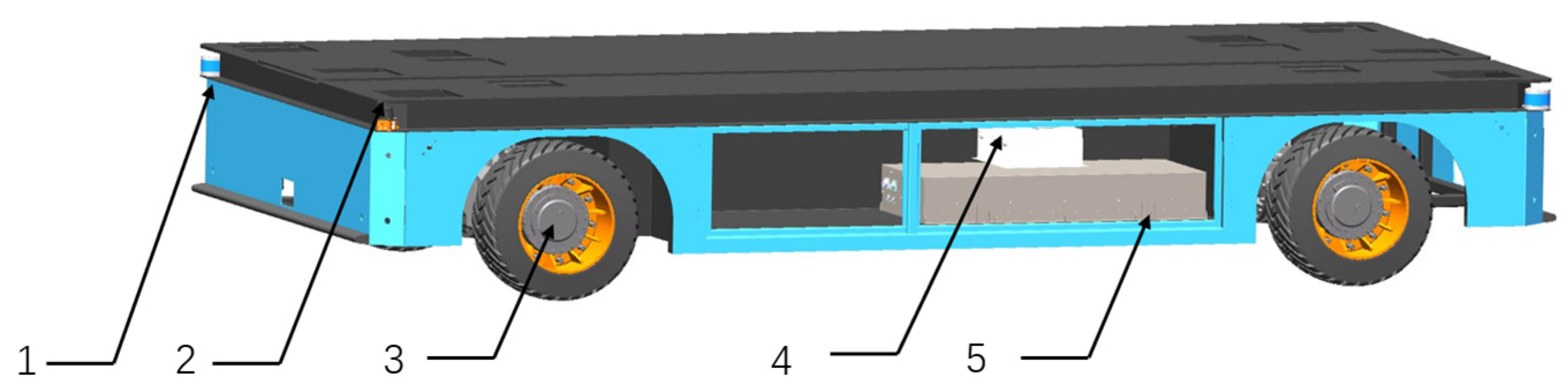
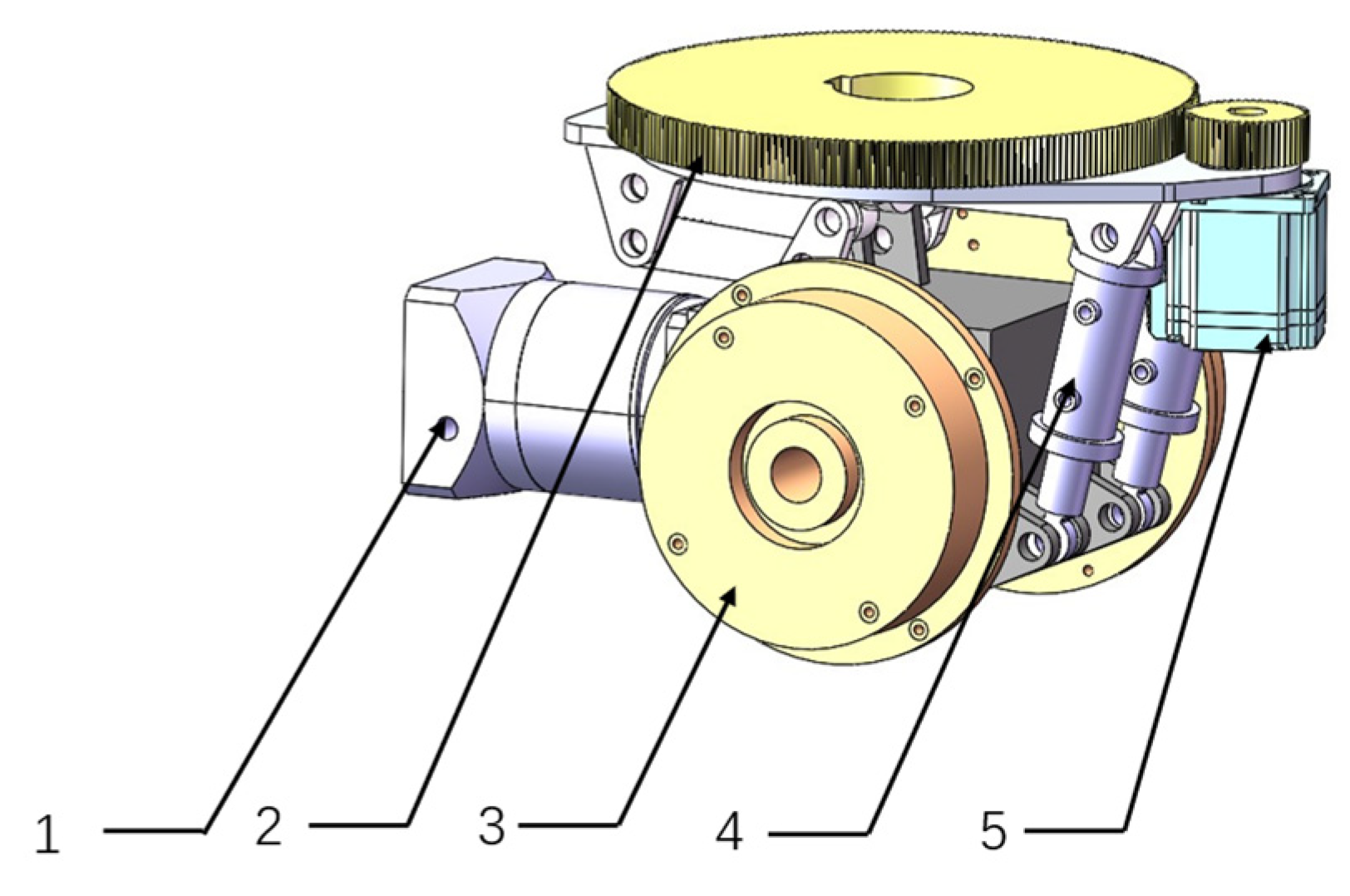
2.1. Overall Mechanical Structure
2.2. Six Motion Modes of the AGV
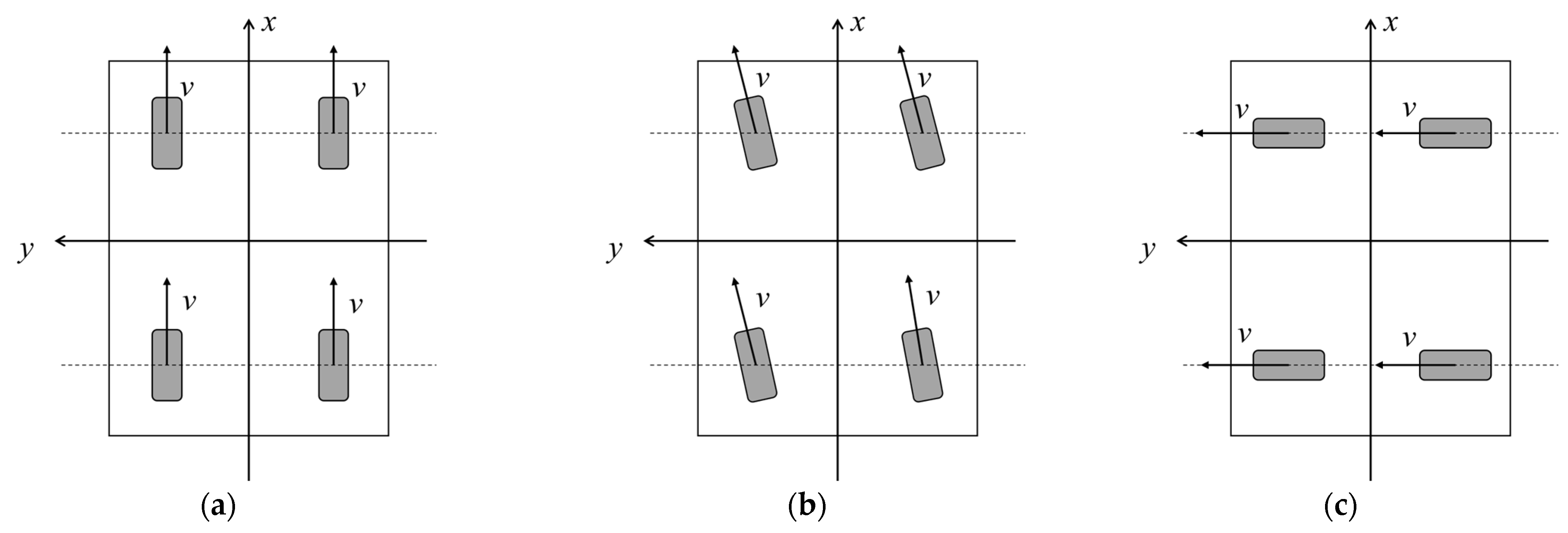
- Straight-line motion. When all four wheels have the same steering angle and driving speed, the AGV can perform three types of straight-line motions, including forward, diagonal, and lateral movements, as shown in Figure 3.
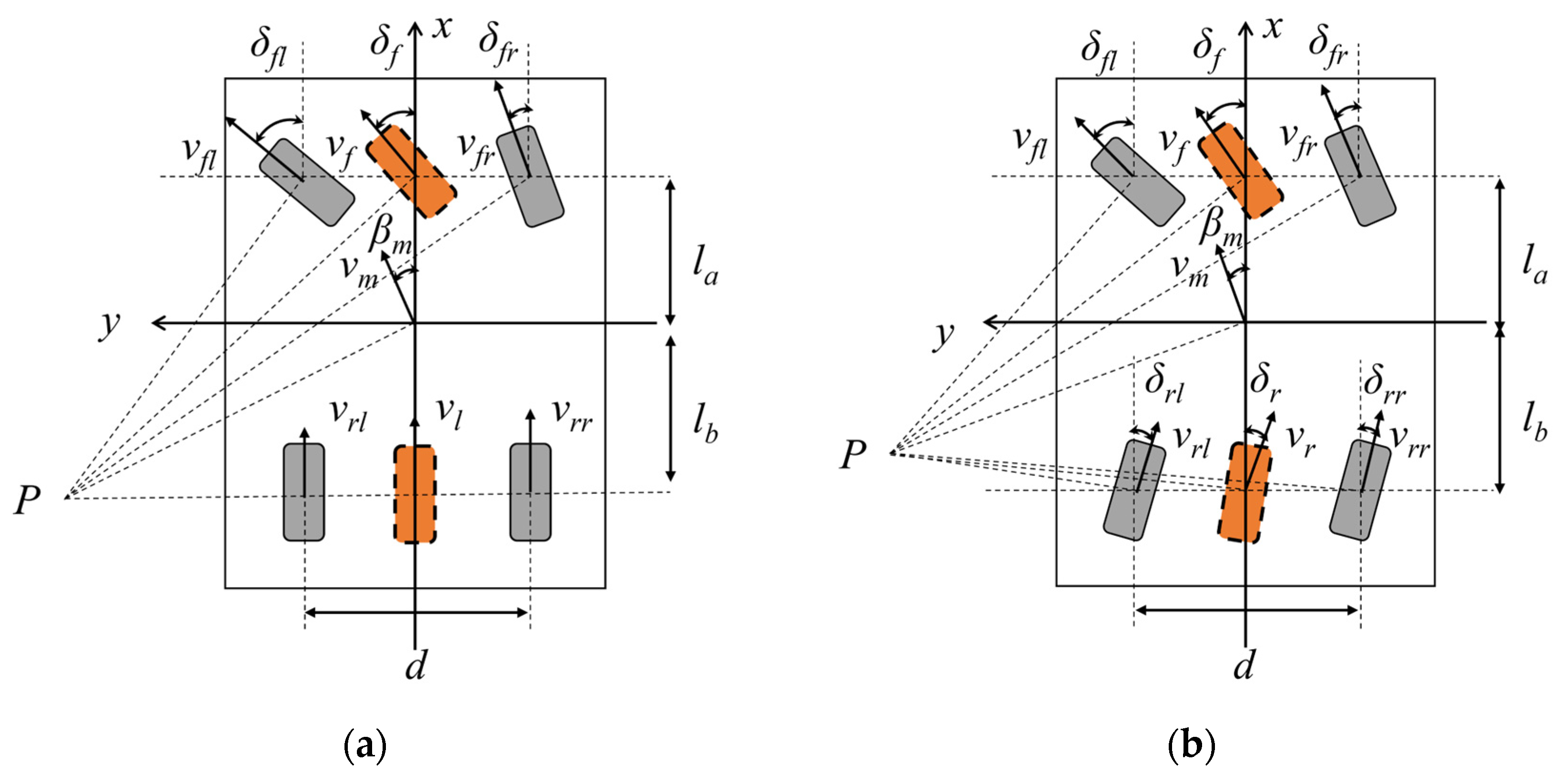
- Curve motion. By controlling the steering angles and driving speeds of the front and rear steering wheels, two steering modes—single Ackermann steering and double Ackermann steering—can be achieved, as shown in Figure 4. In Figure 4, P is the steering center; and represent the front and rear wheelbases, respectively; is the wheel track; , , , and are the steering angles of the four wheels, respectively; , , , and are the speeds of the four wheels, respectively; is the yaw rate; is the wheel track; is the centroid velocity; is the sideslip angle of the centroid; the orange wheels represent the equivalent wheels; and are the equivalent front and rare wheel steering angles, respectively; and and are the equivalent front and rare wheel speeds, respectively.
- 3
- Pivot steering. When the steering angles of the wheels on opposite sides are the same, those on the same side are opposite, and the driving speeds are the same, the AGV pivot-steers around its geometric center, as shown in Figure 5.
3. IMPC Trajectory Tracking Strategy Considering Lateral Stability
3.1. Four-Steering-Wheel AGV Trajectory Tracking Model
- Roll, pitch, and vertical motions are ignored due to the flat workshop floor.
- The output steering angle of the steering motor equals the actual wheel steering angle due to the small tire sideslip deformation.
- The contact between the wheels and the ground is pure rolling without slippage.
- The front wheel track and rear wheel track of the vehicle are equal.
3.2. IMPC Trajectory Tracking Controller
4. Optimal Driving Torque Distribution Strategy Considering Load Transfer and Tire Adhesion Coefficient
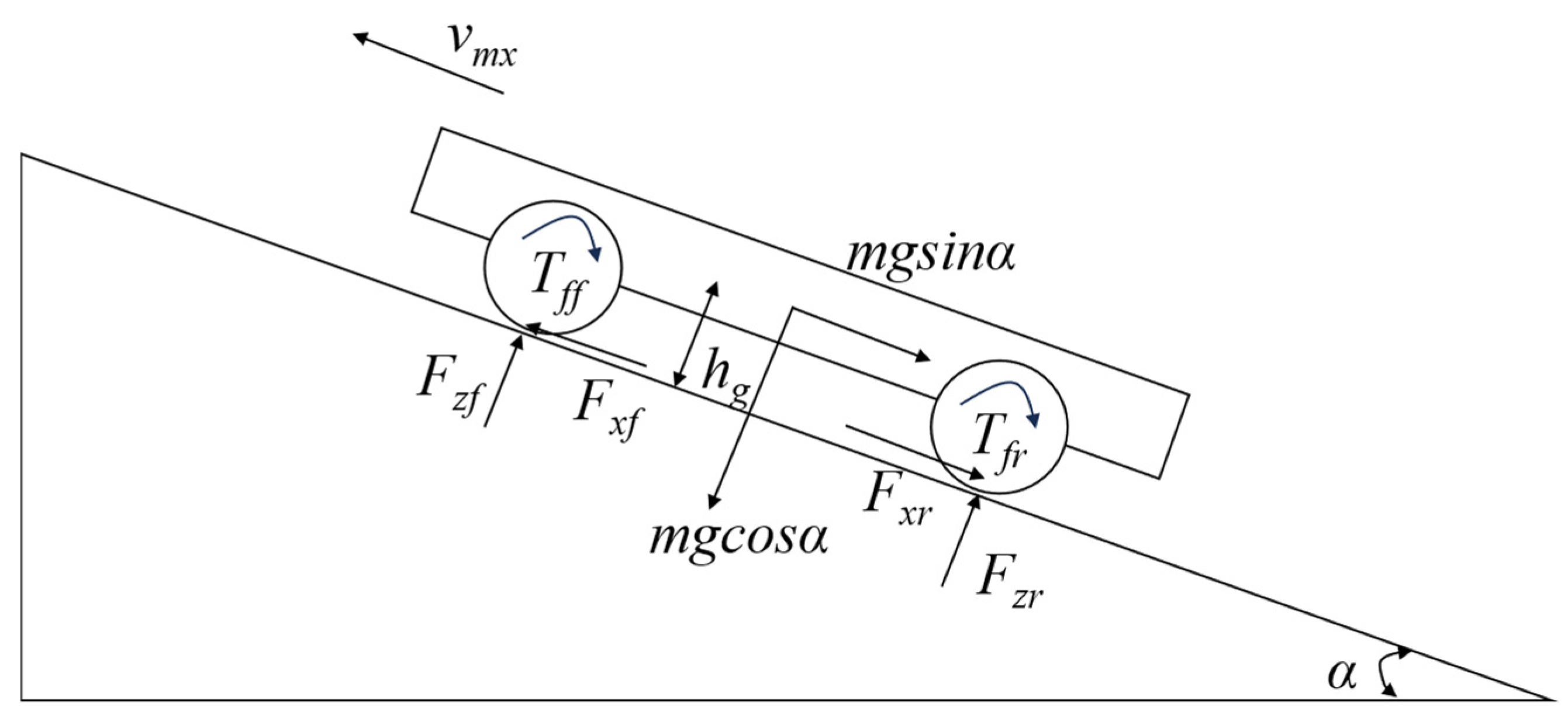
4.1. Four-Steering-Wheel AGV Dynamic Model
- Longitudinal dynamics:
- 2.
- Yaw dynamics:
4.2. Optimal Driving Torque Distributor
5. Results and Discussion
5.1. Introduction to Simulation Scheme
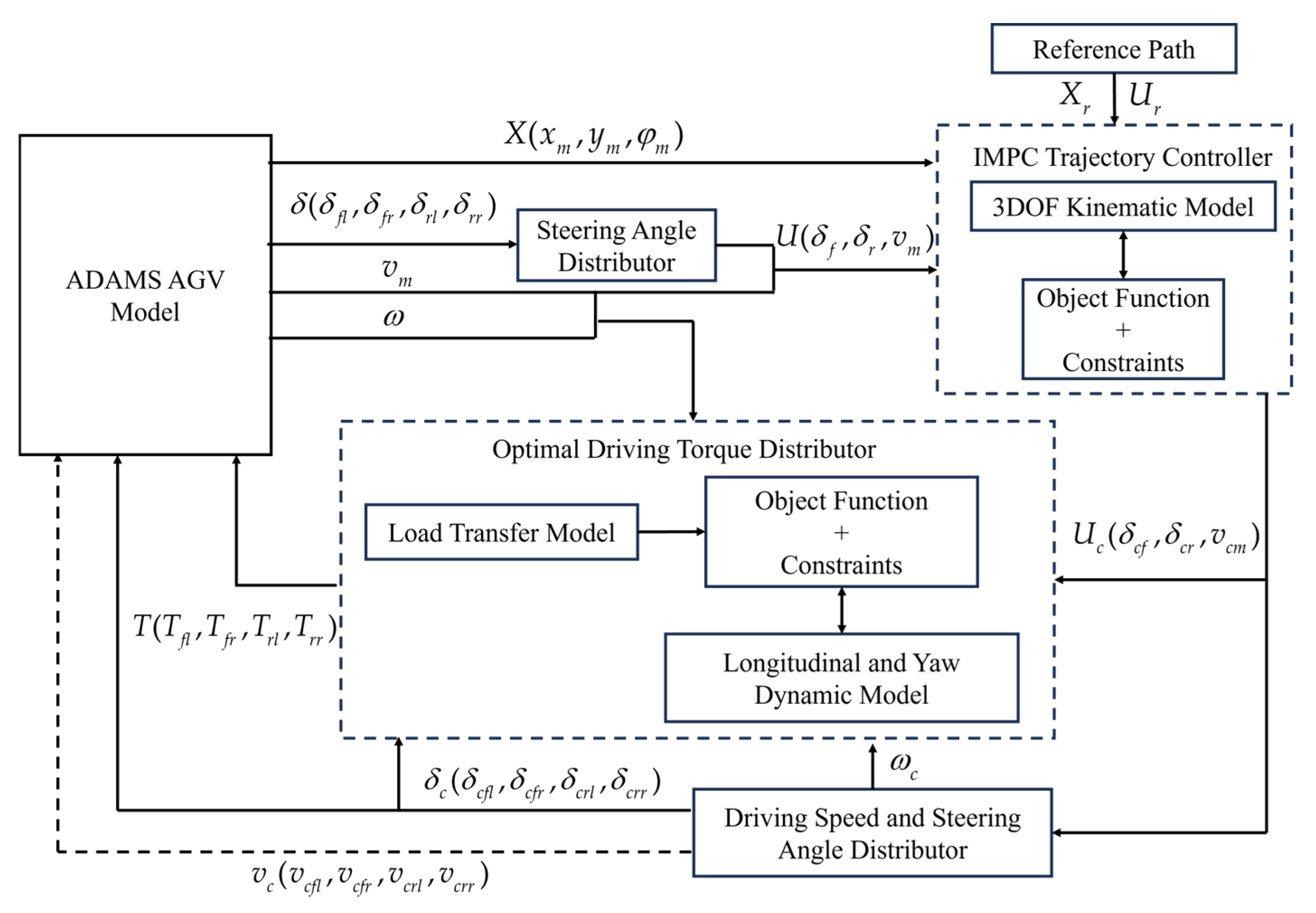
- The ADAMS AGV model was configured with parameters in Table 2. The model features eight inputs (set steering angles and driving torques/speeds for all four steering wheels) and nine outputs (center-of-mass longitudinal/lateral positions, yaw angle, velocity, yaw rate, and steering angles of four wheels). Each steering wheel is simplified into two components, a steerable wheel and a driving wheel, and is connected to the vehicle body via another revolute joint. The complete model consists of nine moving parts, three fixed paths, eight revolute joints, eight tire–ground contact pairs, and six DOF in total. Considering the heavy-load condition, low operating speed, only three DOF are practically active during motion: longitudinal, lateral, and yaw. The steerable wheels employ position-driven control while the driving wheels use torque control to simulate the AGV’s dynamic behavior.
- The driving speed and steering angle distributor performs bidirectional conversion between the complete kinematic vehicle model and the equivalent wheel model.
- The IMPC trajectory tracking controller was developed to holistically consider both the AGV’s trajectory tracking error and the center-of-mass sideslip angle. Through a receding horizon optimization approach, it generates real-time control commands for the equivalent steering wheels at each time step.
- The optimal driving torque distribution controller holistically accounts for both load transfer effects and tire adhesion coefficient. Through QP optimization, it distributes torque to four steering-wheel motors.
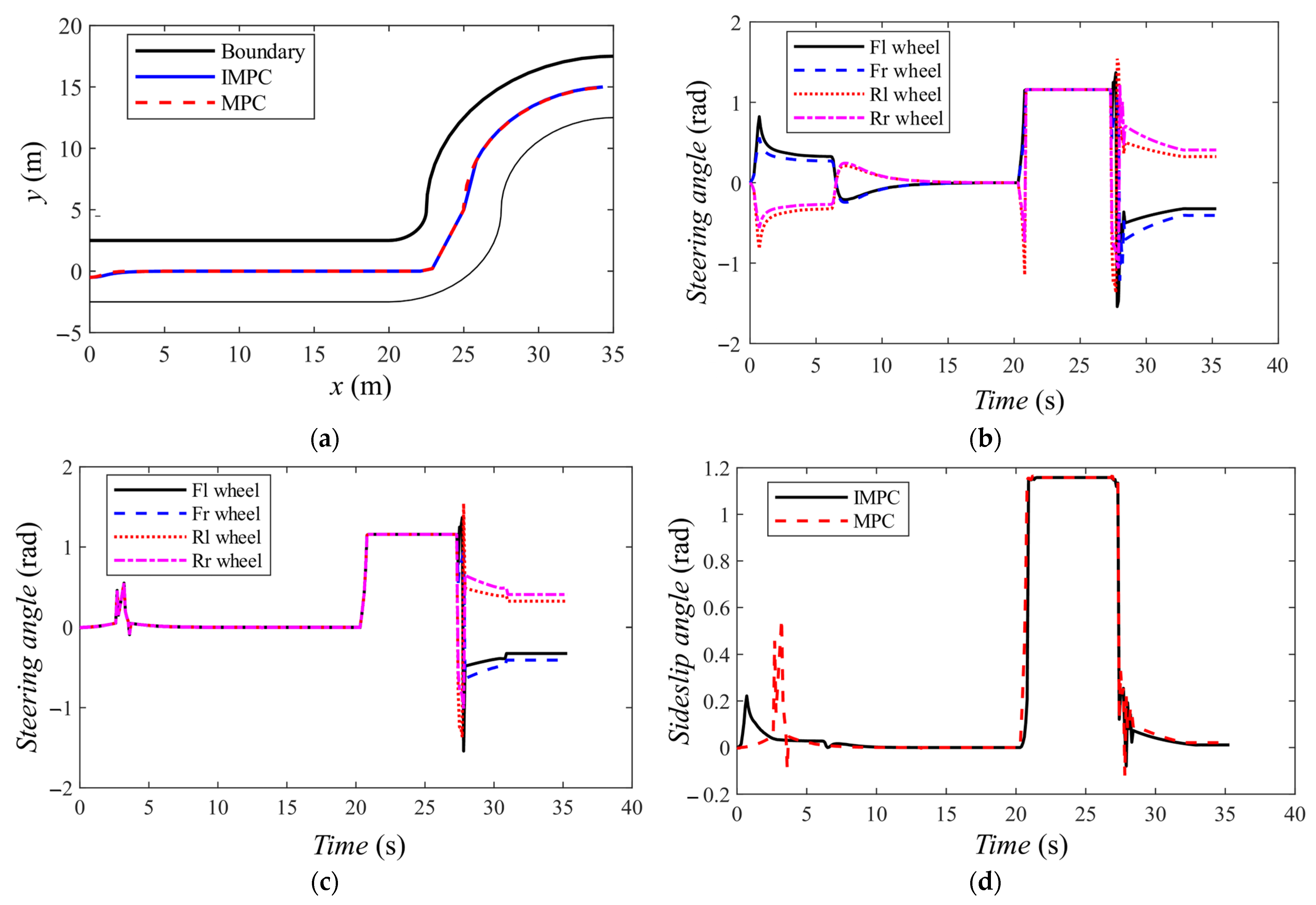
5.2. IMPC Trajectory Tracking Simulation
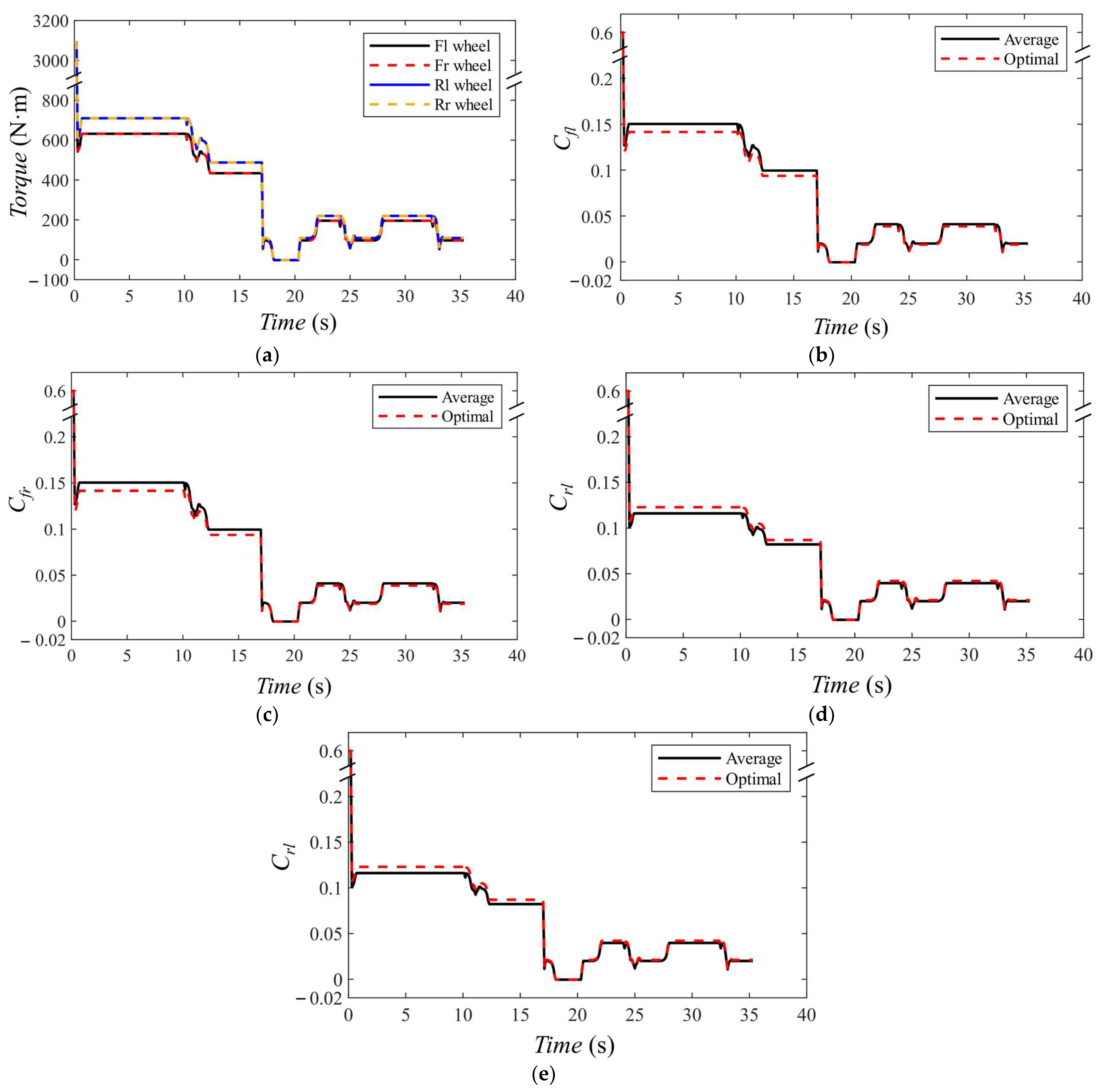
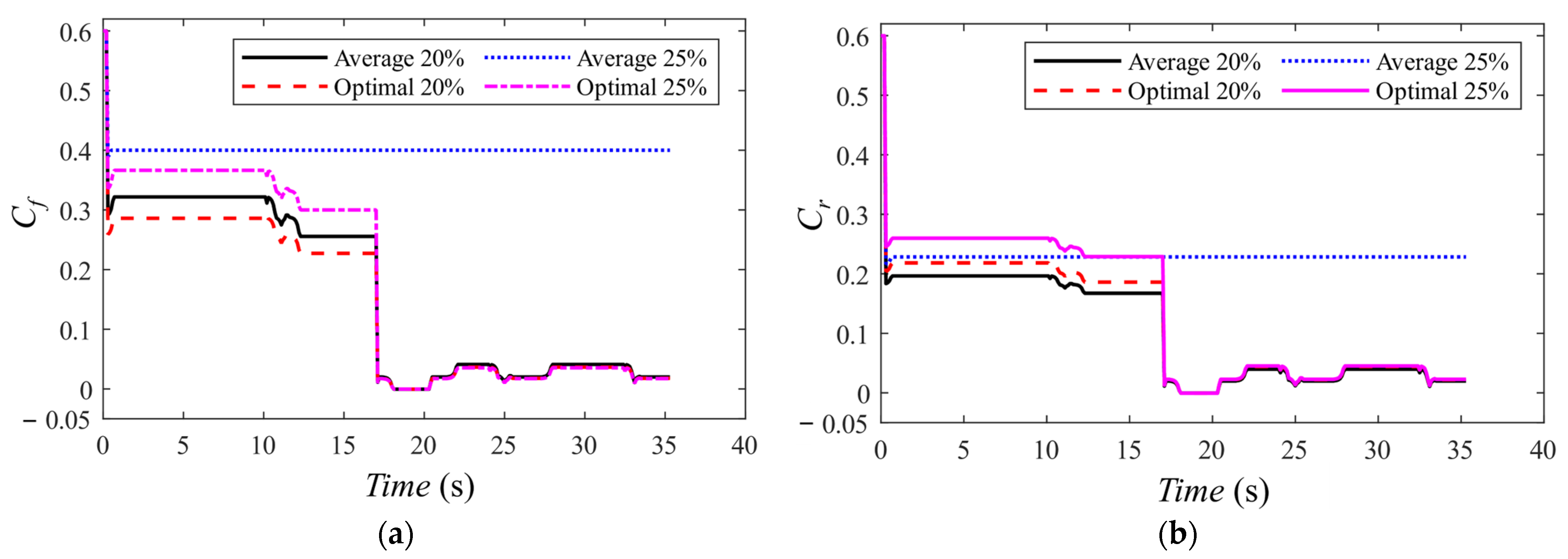
5.3. Optimal Driving Torque Distribution Simulation
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Gupta, M.K. Review on Optimization Techniques for AGV’s Optimization in Flexible Manufacturing System. Gazi U. J. Sci. 2023, 36, 399–412. [Google Scholar] [CrossRef]
- Zhang, W.; Drugge, L.; Nybacka, M.; Jerrelind, J.; Wang, Z. Exploring Four-Wheel Steering for Trajectory Tracking of Autonomous Vehicles in Critical Conditions. In Proceedings of the IAVSD International Symposium on Dynamics of Vehicles on Roads and Tracks, Ottawa, ON, Canada, 21–25 August 2023. [Google Scholar]
- Ran, Q.; Yao, S.; Chen, X.; Bi, G. Trajectory Tracking of Swing-Arm Type Omnidirectional Mobile Robot. Math. Probl. Eng. 2022, 2022, 3297789. [Google Scholar] [CrossRef]
- Hang, P.; Chen, X. Towards Autonomous Driving: Review and Perspectives on Configuration and Control of Four-Wheel Independent Drive/Steering Electric Vehicles. Actuators 2021, 10, 184. [Google Scholar] [CrossRef]
- Wang, B.; Fan, G.; Zhang, X.; Gao, L.; Wang, X.; Fu, W. Multistep Prediction Analysis of Pure Pursuit Method for Automated Guided Vehicles in Aircraft Industry. Actuators 2024, 13, 518. [Google Scholar] [CrossRef]
- Mahdi, M.T.; Nadour, M.; Cherroun, L.; Kouzou, A. Robust and Intelligent Fuzzy Logic Controllers for a Differential Mobile Robot Trajectory Tracking. In Proceedings of the International Conference on Artificial Intelligence and Its Applications in the Age of Digital Transformation, Nouakchott, Mauritania, 23–25 April 2024. [Google Scholar]
- Kati, M.S.; Jonas, F.; Bengt, J.; Laine, L. A Feedback-Feed-Forward Steering Control Strategy for Improving Lateral Dynamics Stability of an A-Double Vehicle at High Speeds. Veh. Syst. Dyn. 2022, 60, 3955–3976. [Google Scholar] [CrossRef]
- He, M.; Ji, P.; Ma, F. Research on Path Tracking Algorithm of Differential Drive Robots Based on Lookahead Distance Adaptive. In Proceedings of the Ninth International Symposium on Advances in Electrical, Electronics, and Computer Engineering (ISAEECE 2024) ISAEECE 2024, Changchun, China, 15–17 March 2024. [Google Scholar]
- Sun, Q.; Li, M.; Cheng, J.; Wang, Z.; Liu, B.; Tai, J. Path Tracking Control of Wheeled Mobile Robot Based on Improved Pure Pursuit Algorithm. In Proceedings of the Chinese Automation Congress (CAC), Hangzhou, China, 22 November 2019. [Google Scholar]
- Wang, M.; Lv, X.; Chen, J.; Su, X. Improved Pure Pursuit Algorithm Based Path Tracking Method for Autonomous Vehicle. J. Adv. Comput. Intell. Inform. 2024, 28, 1034–1042. [Google Scholar] [CrossRef]
- Ahn, J.; Shin, S.; Kim, M.; Park, J. Accurate Path Tracking by Adjusting Look-Ahead Point in Pure Pursuit Method. Int. J. Automot. Technol. 2021, 22, 119–129. [Google Scholar] [CrossRef]
- Wang, X.; Xu, B.; Guo, Y. Fuzzy Logic System-Based Robust Adaptive Control of AUV with Target Tracking. Int. J. Fuzzy Syst. 2023, 25, 338–346. [Google Scholar] [CrossRef]
- Ryoo, Y.-J. Trajectory-Tracking Control of a Transport Robot for Smart Logistics Using the Fuzzy Controller. Int. J. Fuzzy Log. Intell. Syst. 2022, 22, 69–77. [Google Scholar] [CrossRef]
- Zhang, C.; Gao, G.; Zhao, C.; Li, L.; Li, C.; Chen, X. Research on 4WS Agricultural Machine Path Tracking Algorithm Based on Fuzzy Control Pure Tracking Model. Machines 2022, 10, 597. [Google Scholar] [CrossRef]
- Wang, Y.; Jiang, B.; Wu, Z.-G.; Xie, S.; Peng, Y. Adaptive Sliding Mode Fault-Tolerant Fuzzy Tracking Control with Application to Unmanned Marine Vehicles. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 6691–6700. [Google Scholar] [CrossRef]
- Nguyen, A.-T.; Rath, J.; Guerra, T.-M.; Palhares, R.; Zhang, H. Robust Set-Invariance Based Fuzzy Output Tracking Control for Vehicle Autonomous Driving under Uncertain Lateral Forces and Steering Constraints. IEEE Trans. Intell. Transp. Syst. 2021, 22, 5849–5860. [Google Scholar] [CrossRef]
- Viadero-Monasterio, F.; Nguyen, A.-T.; Lauber, J.; Boada, M.J.L.; Boada, B.L. Event-Triggered Robust Path Tracking Control Considering Roll Stability under Network-Induced Delays for Autonomous Vehicles. IEEE Trans. Intell. Transp. Syst. 2023, 24, 14743–14756. [Google Scholar] [CrossRef]
- Chen, C.; Shu, M.; Yang, Y.; Gao, T.; Bian, L. Robust H∞ Path Tracking Control of Autonomous Vehicles with Delay and Actuator Saturation. J. Control Decis. 2022, 9, 45–57. [Google Scholar] [CrossRef]
- Kennouche, A.; Saifia, D.; Chadli, M.; Labiod, S. Multi-Objective H2/H∞Saturated Non-PDC Static Output Feedback Control for Path Tracking of Autonomous Vehicle. Trans. Inst. Meas. Control 2022, 44, 2235–2247. [Google Scholar] [CrossRef]
- Chen, Y.; Gai, J.; He, S.; Li, H.; Cheng, C.; Zou, W. MPC-TD3 Trajectory Tracking Control for Electrically Driven Unmanned Tracked Vehicles. Electronics 2024, 13, 3747. [Google Scholar] [CrossRef]
- Tang, M.; Lin, S.; Luo, Y. Mecanum Wheel AGV Trajectory Tracking Control Based on Efficient MPC Algorithm. IEEE Access 2024, 12, 13763–13772. [Google Scholar] [CrossRef]
- Xu, Y.; Tang, W.; Chen, B.; Qiu, L.; Yang, R. A Model Predictive Control with Preview-Follower Theory Algorithm for Trajectory Tracking Control in Autonomous Vehicles. Symmetry 2021, 13, 381. [Google Scholar] [CrossRef]
- Leman, Z.A.; Ariff, M.H.M.; Zamzuri, H.; Rahman, M.A.A.; Mazlan, S.A.; Bahiuddin, I.; Yakub, F. Adaptive Model Predictive Controller for Trajectory Tracking and Obstacle Avoidance on Autonomous Vehicle. J. Teknol. (Sci. Eng.) 2022, 84, 139–148. [Google Scholar]
- Li, Y.; He, D.; Ma, F.; Liu, P.; Liu, Y. MPC-Based Trajectory Tracking Control of Unmanned Underwater Tracked Bulldozer Considering Track Slipping and Motion Smoothing. Ocean Eng. 2023, 279, 114449. [Google Scholar] [CrossRef]
- Viadero-Monasterio, F.; García, J.; Meléndez-Useros, M.; Jiménez-Salas, M.; Boada, B.L.; López Boada, M.J. Simultaneous Estimation of Vehicle Sideslip and Roll Angles Using an Event-Triggered-Based IoT Architecture. Machines 2024, 12, 53. [Google Scholar] [CrossRef]
- Chen, B.-S.; Wu, P.-H. Robust H∞ Observer-Based Reference Tracking Control Design of Nonlinear Stochastic Systems: HJIE-Embedded Deep Learning Approach. IEEE Access 2022, 10, 39889–39911. [Google Scholar] [CrossRef]
- Yoon, K.; Choi, J.; Huh, K. Adaptive Decentralized Sensor Fusion for Autonomous Vehicle: Estimating the Position of Surrounding Vehicles. IEEE Access 2023, 11, 90999–91008. [Google Scholar] [CrossRef]
- Zhai, L.; Sun, T.; Wang, J. Electronic Stability Control Based on Motor Driving and Braking Torque Distribution for a Four In-Wheel Motor Drive Electric Vehicle. IEEE Trans. Veh. Technol. 2016, 65, 4726–4739. [Google Scholar] [CrossRef]
- Wu, X.; Zheng, D.; Wang, T.; Du, J. Torque Optimal Allocation Strategy of All-Wheel Drive Electric Vehicle Based on Difference of Efficiency Characteristics between Axis Motors. Energies 2019, 12, 1122. [Google Scholar] [CrossRef]
- Zhou, H.; Lu, Z.; Deng, X.; Zhang, C.; Luo, G.; Zhou, R. Study on Torque Distribution of Traction Operation of Four Wheel Independent Driven Electric Tractor. J. Nanjing Agric. Univ. 2018, 41, 962–970. [Google Scholar]
- Zhang, X.; Wang, B.; Deng, Z.; Wu, H.; Zhu, Y. Research on Stability of Four-Wheel Independent Electric Drive Vehicle Based on Sliding Mode Coordinated Control. Mod. Manuf. Eng. 2024, 1, 51–57. [Google Scholar] [CrossRef]
- Rahmanei, H.; Aliabadi, A.; Ghaffari, A.; Azadi, S. Lyapunov-Based Control System Design for Trajectory Tracking in Electrical Autonomous Vehicles with in-Wheel Motors. J. Frankl. Inst.-Eng. Appl. Math. 2024, 361, 106736. [Google Scholar] [CrossRef]
- Li, W.; Zhang, Y.; Qin, Y.; Zhao, F.; Wan, M.; Gao, F. Research on Multi-Objective Optimization Torque Distribution Strategy for Distributed Drive Electric Vehicles Based on Dung Beetle Optimizer. Phys. Scr. 2025, 100, 015252. [Google Scholar] [CrossRef]
- Cao, K.; Hu, M.; Wang, D.; Qiao, S.; Guo, C.; Fu, C.; Zhou, A. All-Wheel-Drive Torque Distribution Strategy for Electric Vehicle Optimal Efficiency Considering Tire Slip. IEEE Access 2021, 9, 25245–25257. [Google Scholar] [CrossRef]
- Morera-Torres, E.; Ocampo-Martinez, C.; Bianchi, F.D. Experimental Modelling and Optimal Torque Vectoring Control for 4WD Vehicles. IEEE Trans. Veh. Technol. 2022, 71, 4922–4932. [Google Scholar] [CrossRef]
- Liu, W.; Liu, P.; Yu, Y.; Zhang, Q.; Wan, Y.; Wang, M. Optimal Torque Distribution of Distributed Driving AGV under the Condition of Centroid Change. Sci. Rep. 2021, 11, 21404. [Google Scholar] [CrossRef] [PubMed]
- Kim, H.-W.; Amarnathvarma, A.; Kim, E.; Hwang, M.-H.; Kim, K.; Kim, H.; Choi, I.; Cha, H.-R. A Novel Torque Matching Strategy for Dual Motor-Based All-Wheel-Driving Electric Vehicles. Energies 2022, 15, 2717. [Google Scholar] [CrossRef]
- Siwek, M.; Panasiuk, J.; Baranowski, L.; Kaczmarek, W.; Prusaczyk, P.; Borys, S. Identification of Differential Drive Robot Dynamic Model Parameters. Materials 2023, 16, 683. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, Z.; Wang, Y.; Zhang, C.; Zhao, B. Research on Automobile Four-Wheel Steering Control System Based on Yaw Angular Velocity and Centroid Cornering Angle. Meas. Control 2022, 55, 49–61. [Google Scholar] [CrossRef]
- Cao, G.; Zhao, X.; Ye, C.; Yu, S.; Li, B.; Jiang, C. Fuzzy Adaptive PID Control Method for Multi-Mecanum-Wheeled Mobile Robot. J. Mech. Sci. Technol. 2022, 36, 2019–2029. [Google Scholar] [CrossRef]
- Doroliat, A.P.; Ing, M.-H.; Li, C.-H.G. Optimization of Mecanum Wheels for Mitigation of AGV Vibration. Int. J. Adv. Manuf. Technol. 2022, 121, 633–645. [Google Scholar] [CrossRef]
- Yu, Z.; Xia, Q. Automobile Theory, 6th ed.; China Machine Press: Beijing, China, 2018; pp. 9–24. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Unit | Value |
|---|---|---|
| curb quality | t | 2 |
| gross quality | t | 7 |
| minimum turning radius | m | 0 |
| maximum speed | m/s | 2 |
| maximum acceleration | m/s2 | 0.2 |
| vehicle size (length × width × height) | mm | 5000 × 1800 × 900 |
| cargo stacking height | mm | 1200 |
| Parameter | Unit | Value |
|---|---|---|
| total mass | t | 7 |
| moment of inertia | kg·m2 | 5099 |
| wheelbase | mm | 3780 |
| wheel track | mm | 1240 |
| height of the center of mass | mm | 1100 |
| driving wheel radius | mm | 300 |
| tire cornering stiffness | N/rad | −40,000 |
| tire–road adhesion coefficient | 0.7 | |
| tire–road rolling resistance coefficient | 0.02 |
| Parameter | Unit | Value |
|---|---|---|
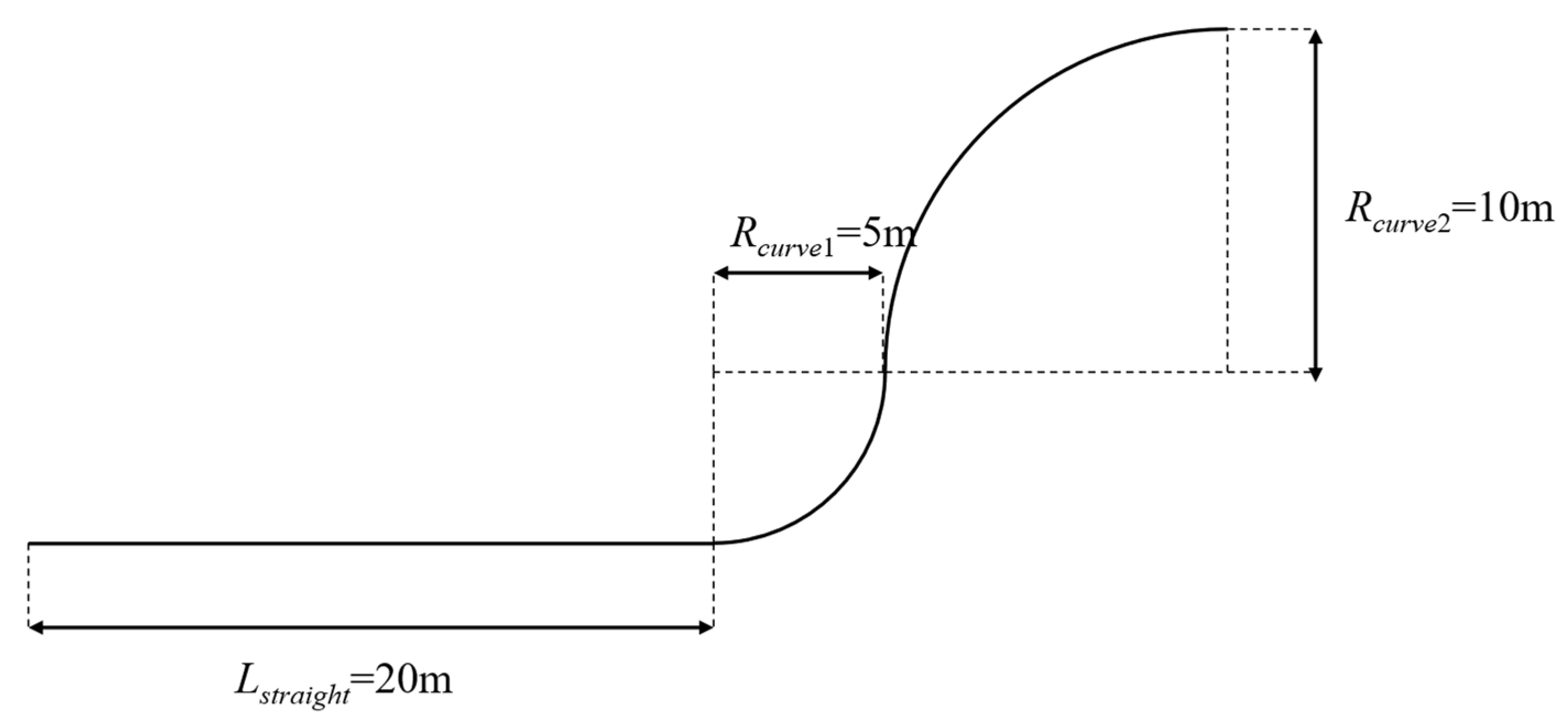
| straight section length | m | 20 |
| straight section width | m | 5 |
| straight section gradient | 10% | |
| curve 1 centerline radius | m | 5 |
| curve 1 width | m | 5 |
| curve 2 centerline radius | m | 10 |
| curve 2 width | m | 10 |
| Road Section | Motion Modes | Max Steady-State Error |
|---|---|---|
| starting point | start from static | 0.5 m |
| climbing straight | double Ackermann | 0.0189 m |
| curve 1 | diagonal | 0.0195 m |
| curve 2 | double Ackermann | 0.0443 m |
| Road Section | Average Distribution | Optimal Distribution | Reduction Percentage |
|---|---|---|---|
| climbing straight | 0.151 | 0.141 | 6.62% |
| curve 1 | 0.0421 | 0.0411 | 2.4% |
| curve 2 | 0.0398 | 0.0387 | 2.26% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, X.; Chen, X.; Chen, S.; Liu, B.; Wang, C. Trajectory Tracking and Driving Torque Distribution Strategy for Four-Steering-Wheel Heavy-Duty Automated Guided Vehicles. Machines 2025, 13, 383. https://doi.org/10.3390/machines13050383
Li X, Chen X, Chen S, Liu B, Wang C. Trajectory Tracking and Driving Torque Distribution Strategy for Four-Steering-Wheel Heavy-Duty Automated Guided Vehicles. Machines. 2025; 13(5):383. https://doi.org/10.3390/machines13050383
Chicago/Turabian StyleLi, Xia, Xiaojie Chen, Shengzhan Chen, Benxue Liu, and Chengming Wang. 2025. "Trajectory Tracking and Driving Torque Distribution Strategy for Four-Steering-Wheel Heavy-Duty Automated Guided Vehicles" Machines 13, no. 5: 383. https://doi.org/10.3390/machines13050383
APA StyleLi, X., Chen, X., Chen, S., Liu, B., & Wang, C. (2025). Trajectory Tracking and Driving Torque Distribution Strategy for Four-Steering-Wheel Heavy-Duty Automated Guided Vehicles. Machines, 13(5), 383. https://doi.org/10.3390/machines13050383