
An Investigation on the Mechanical Characteristics of Railway Locomotive Axle Box Bearings with Sensor-Embedded Slots



Abstract
1. Introduction
2. The Theoretical Model of Double-Row Tapered Roller Bearing
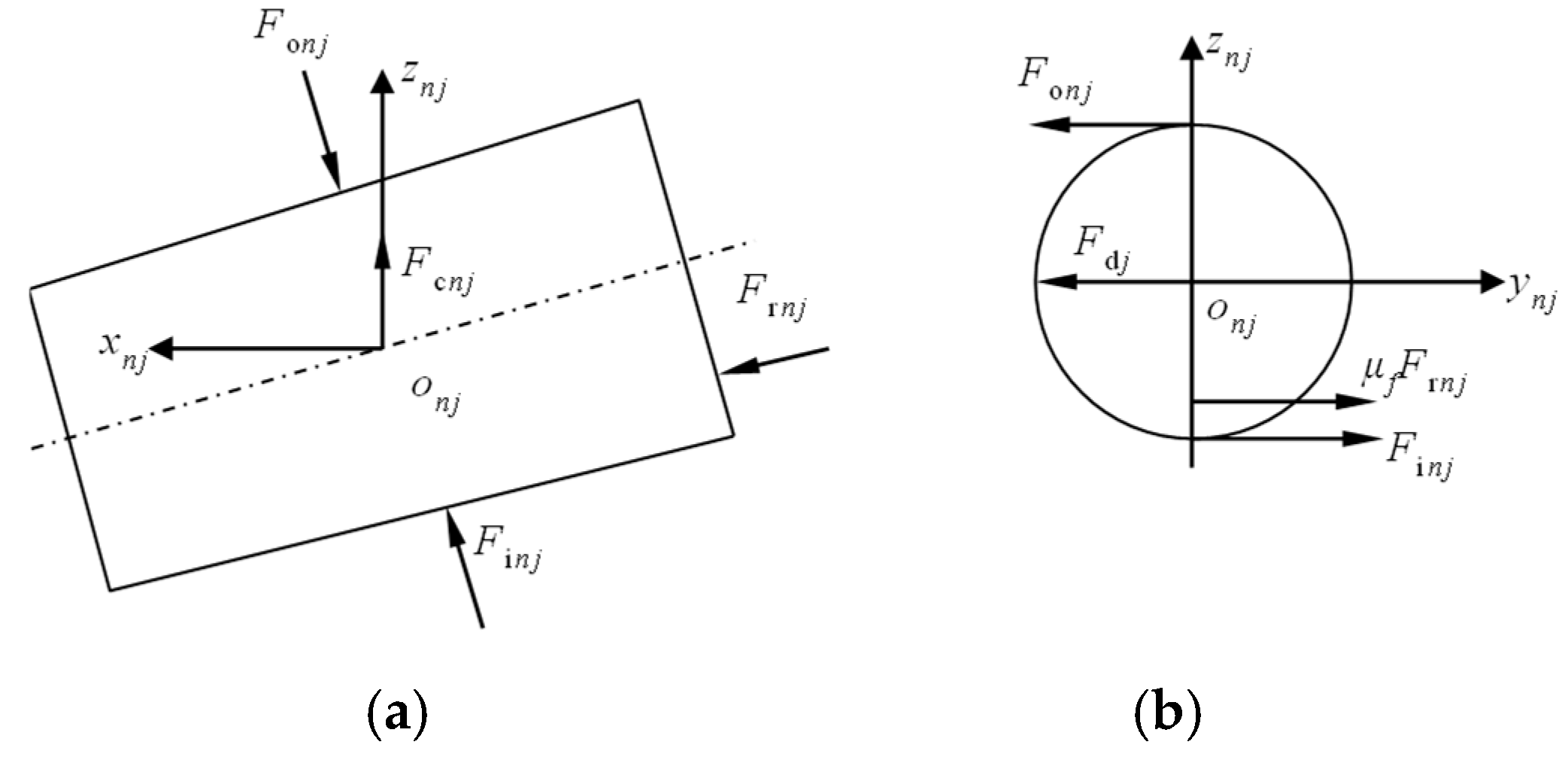
2.1. Bearing Contact Load
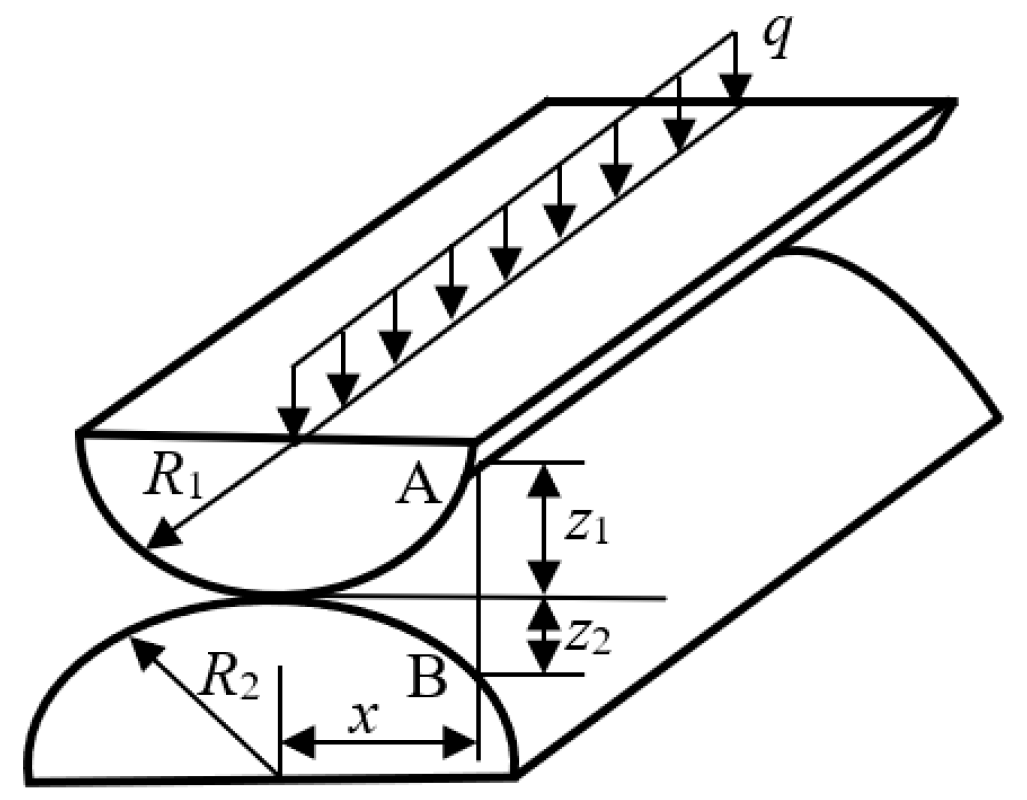
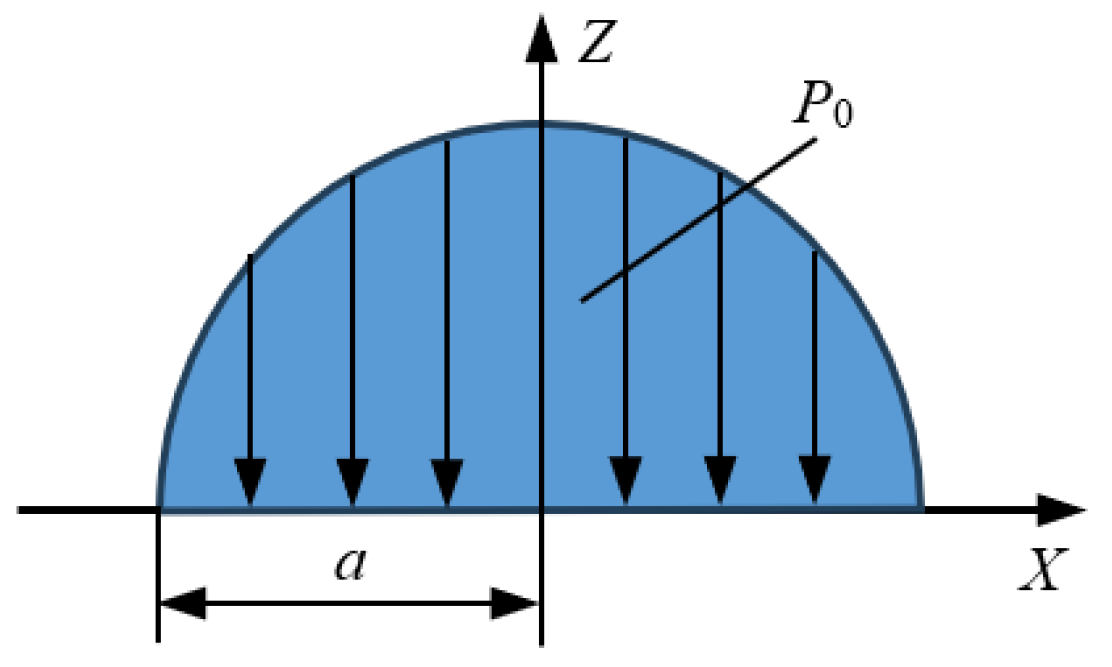
2.2. Bearing Contact Stress
2.3. The Theoretical Model of Embedded Groove Fatigue Life in Bearings
3. FE Model Development and Validation
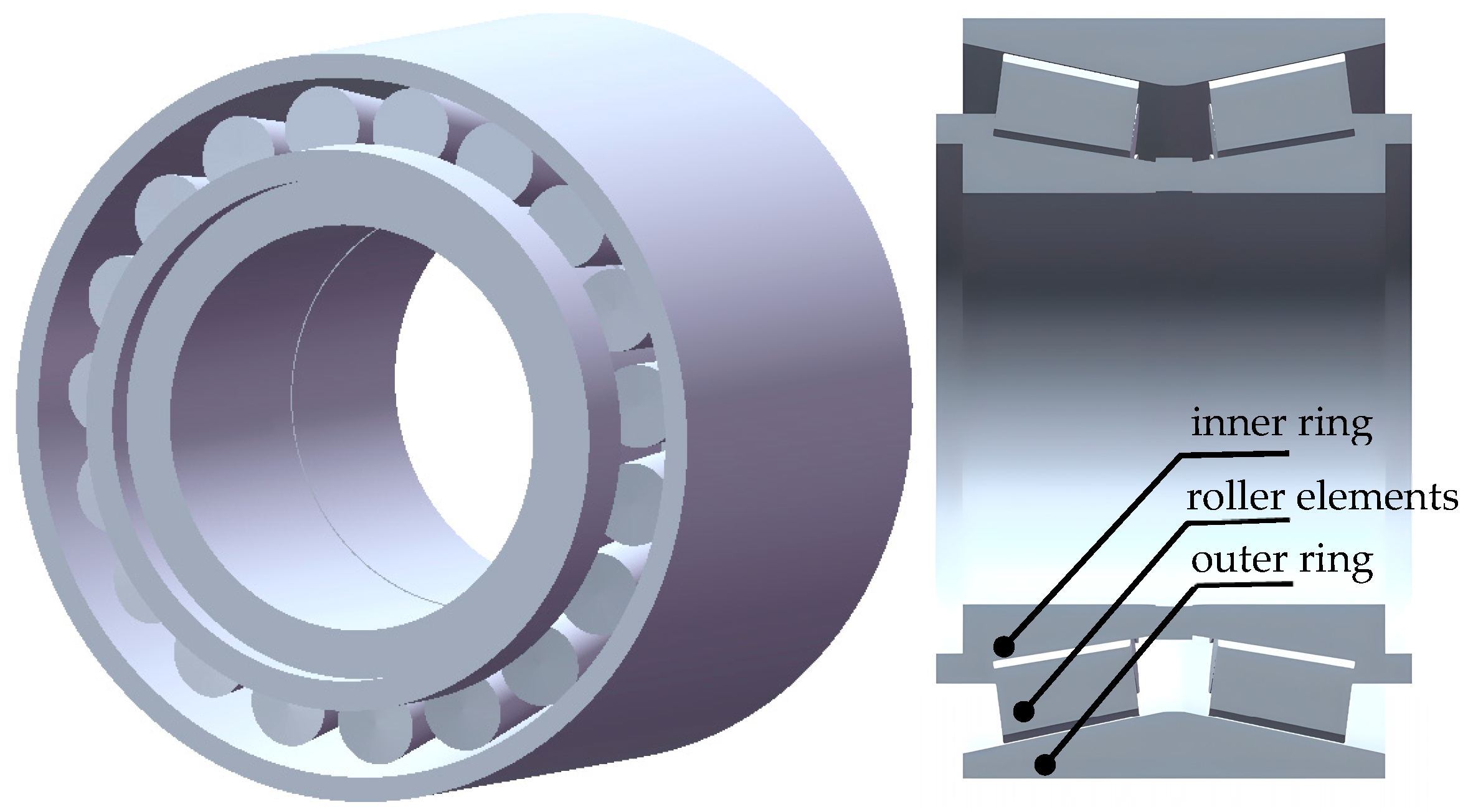
3.1. The Structural Feature of Double-Row Tapered Roller Bearings
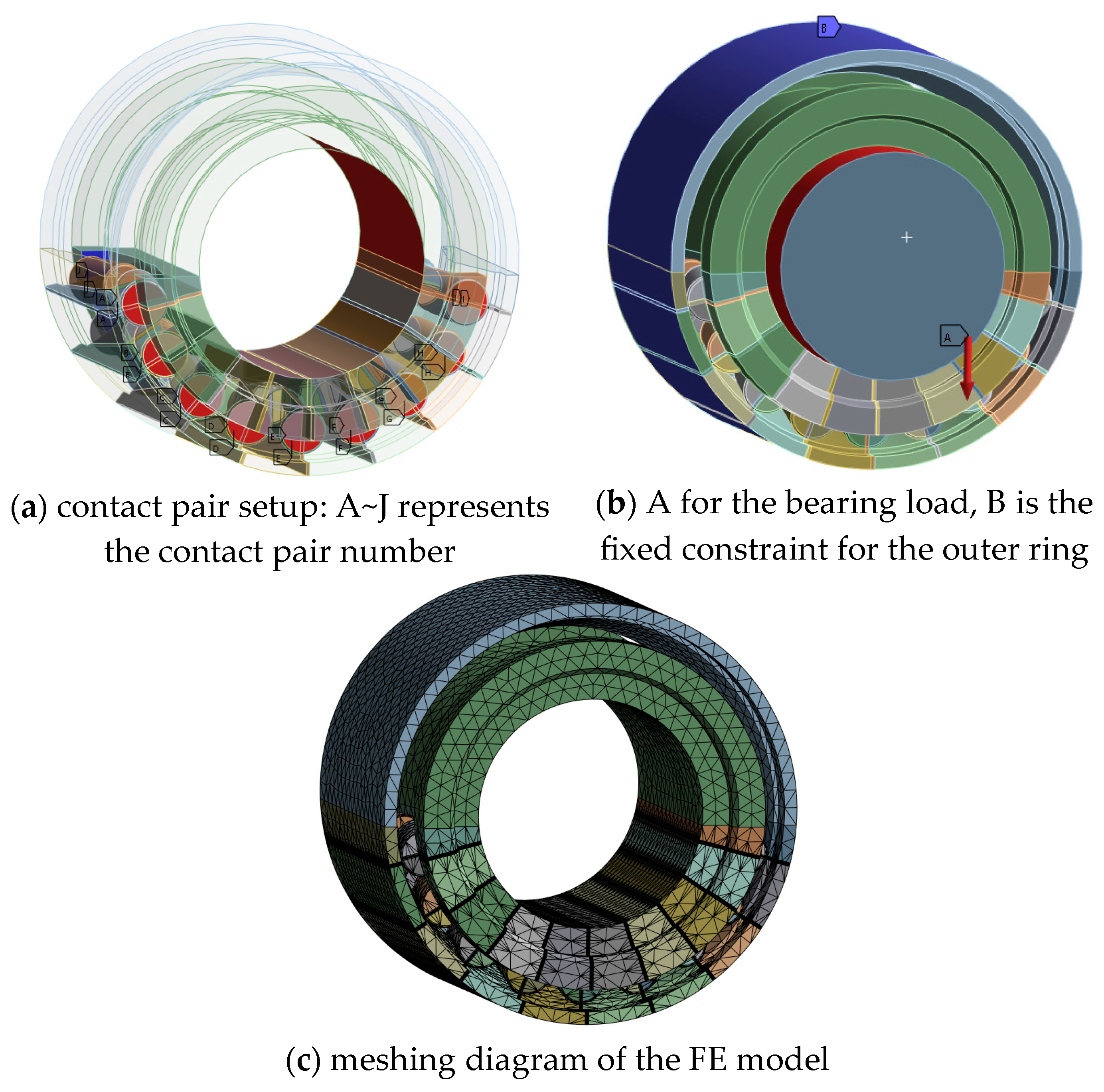
3.2. Mechanical Equivalent FE Modeling of the Bearing
3.3. Model Verification by Grid Independence Analysis
3.4. Case Analysis and Validation
3.5. The Construction of the Bearing Mechanical Model with Sensor-Embedded Slots
4. Embedded Slot Bearing Mechanics and Fatigue Life Analysis
4.1. Mesh Independence Verification for Embedded Slot Bearing
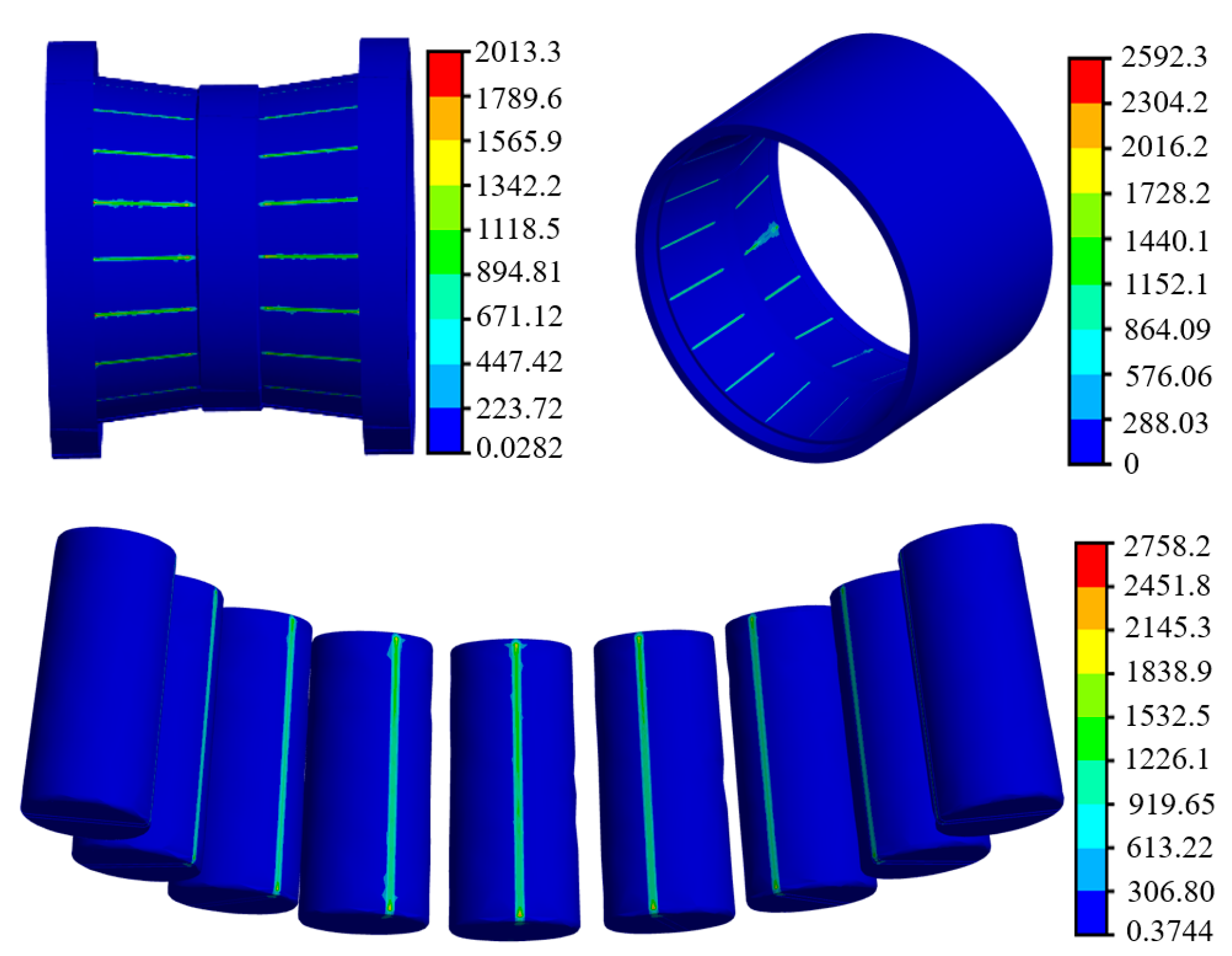
4.2. A Stress Analysis of Heterogeneous Ring Bearing Under Actual Load Conditions
4.3. An Analysis of the Effect of Sensor-Embedded Slots on Fatigue Life
4.3.1. The Influence of Embedded Slot Stress
4.3.2. The Influence of Embedded Slot Fatigue Life
5. Conclusions
- (1)
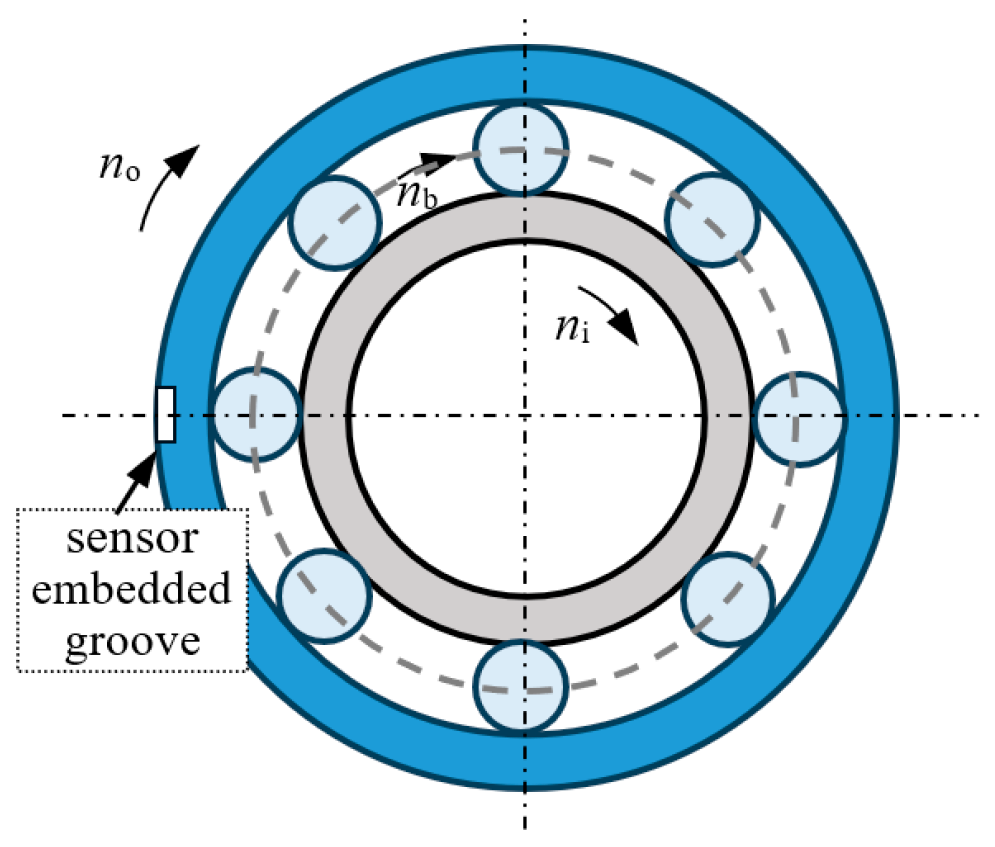
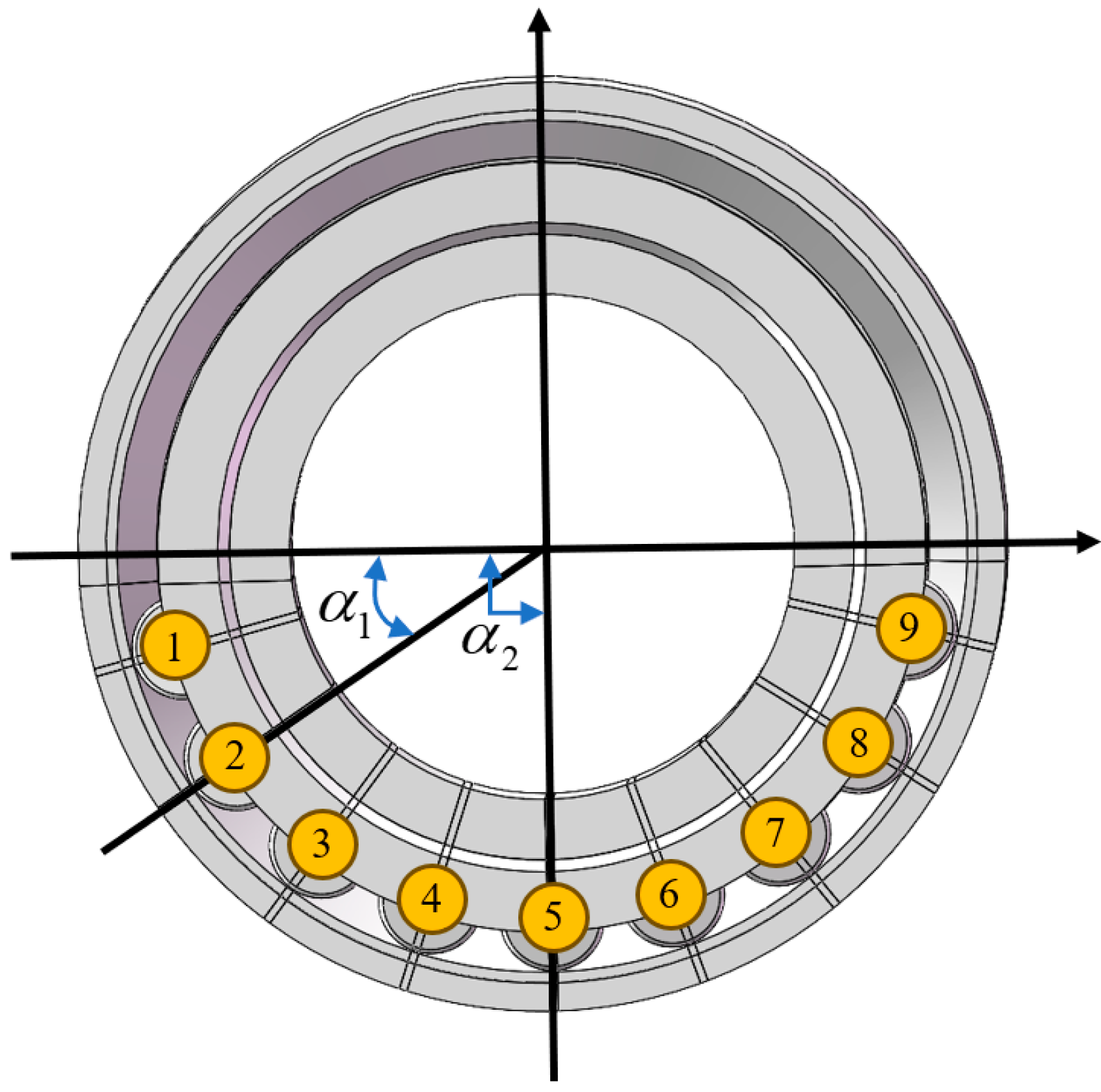
- A mechanical equivalent an FE model with a virtual mandrel is established for double-row tapered roller bearings with sensor-embedded slots, which considers equivalent loads of axial and radial loads. Since the lower portion of rolling elements bear the load, the upper portion of rollers, which do not, are omitted. The chamfer at the end face is simplified while retaining the basic structure of the bearing. The contact regions between the rolling elements and the inner/outer raceways are segmented and modeled with mesh refinement.
- (2)
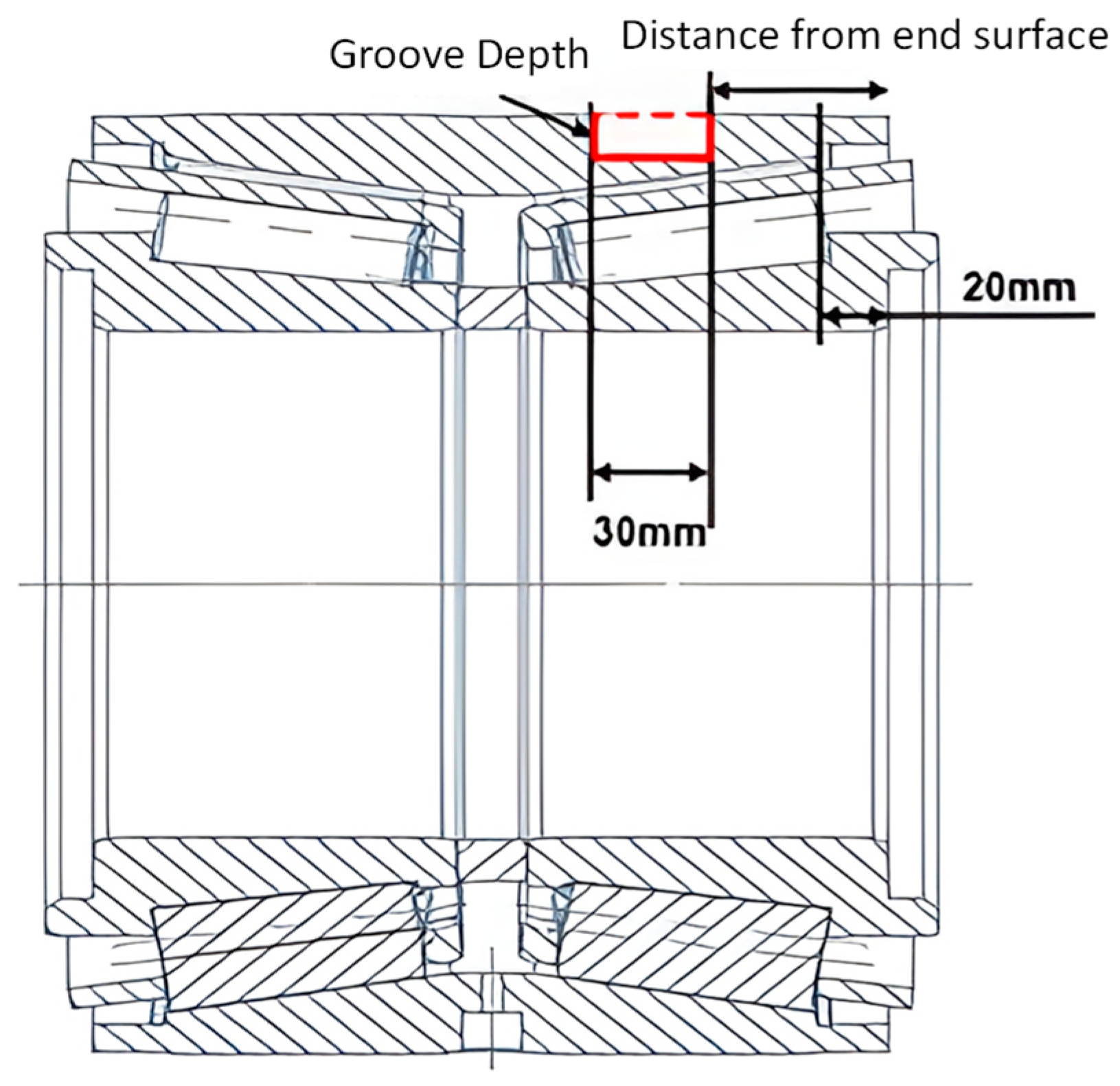
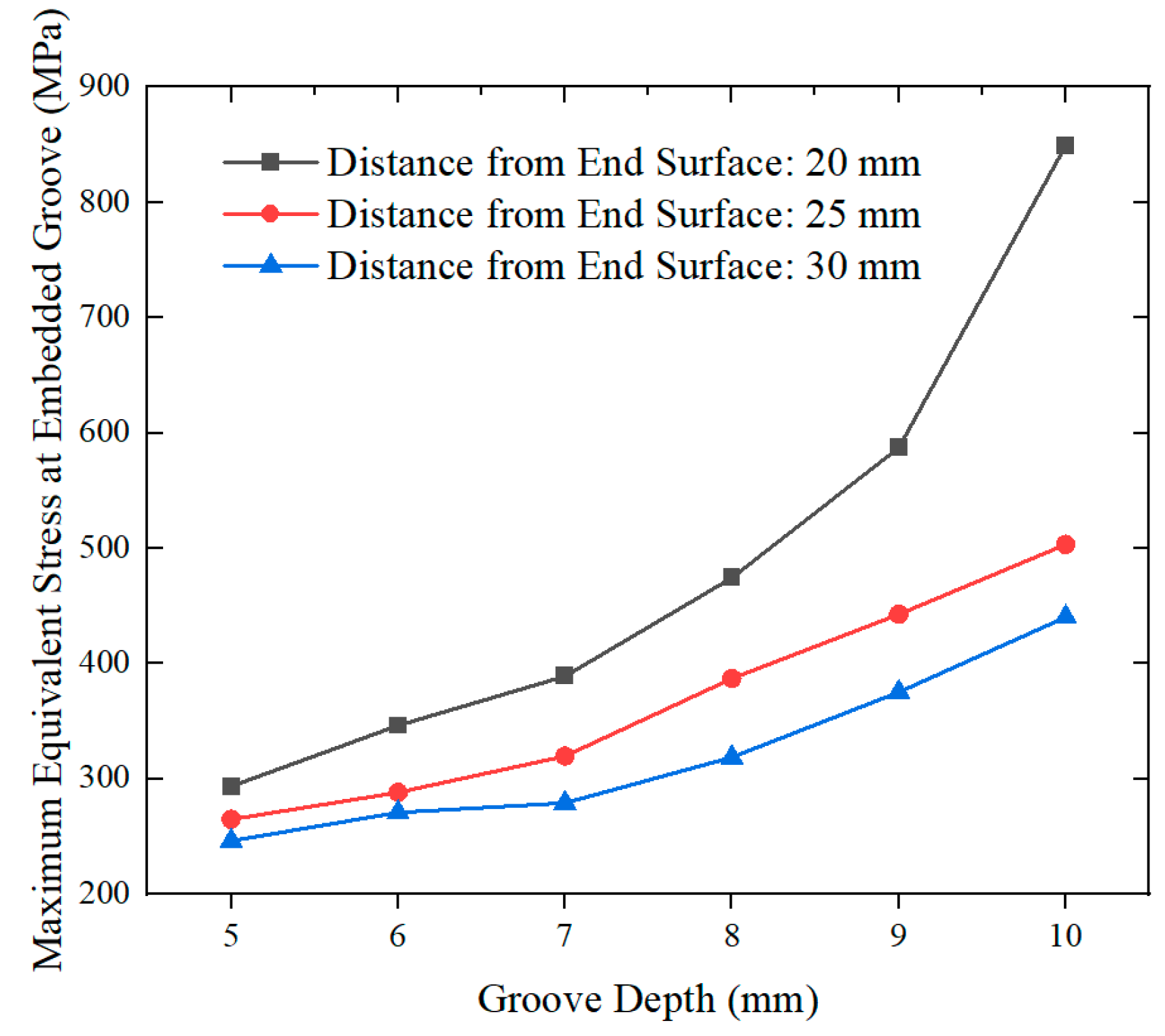
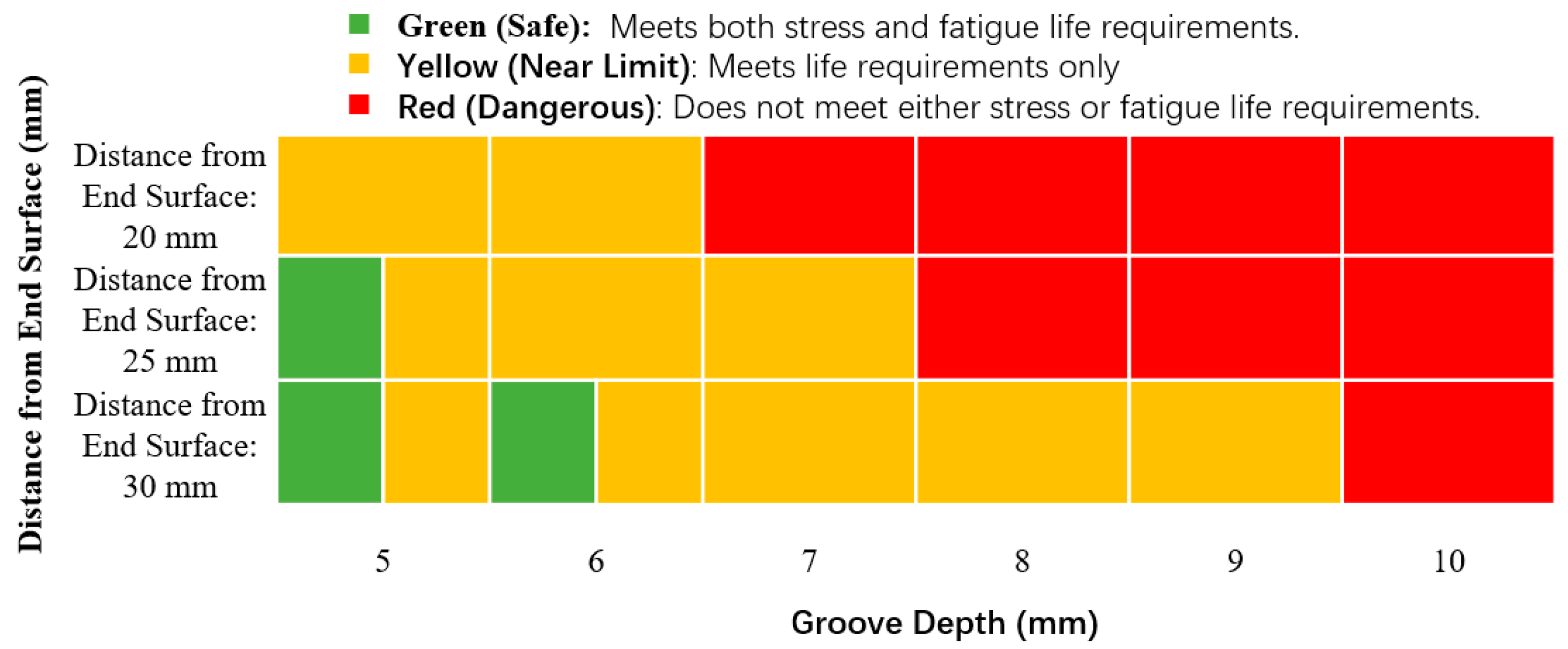
- The position and depth of the slot significantly affect the stress distribution in local regions. Through simulation analysis and theoretical validation, it was determined that when the offset distance of the embedded slot from the end face is 30 mm, the depth of the groove should be within 5–9 mm. When the offset distance is 25 mm, the groove depth should be 5–7 mm. When the offset distance is 20 mm, the groove depth should be 5–6 mm. Localized stresses are small and evenly distributed, which can effectively increase the strength of the slots.
- (3)
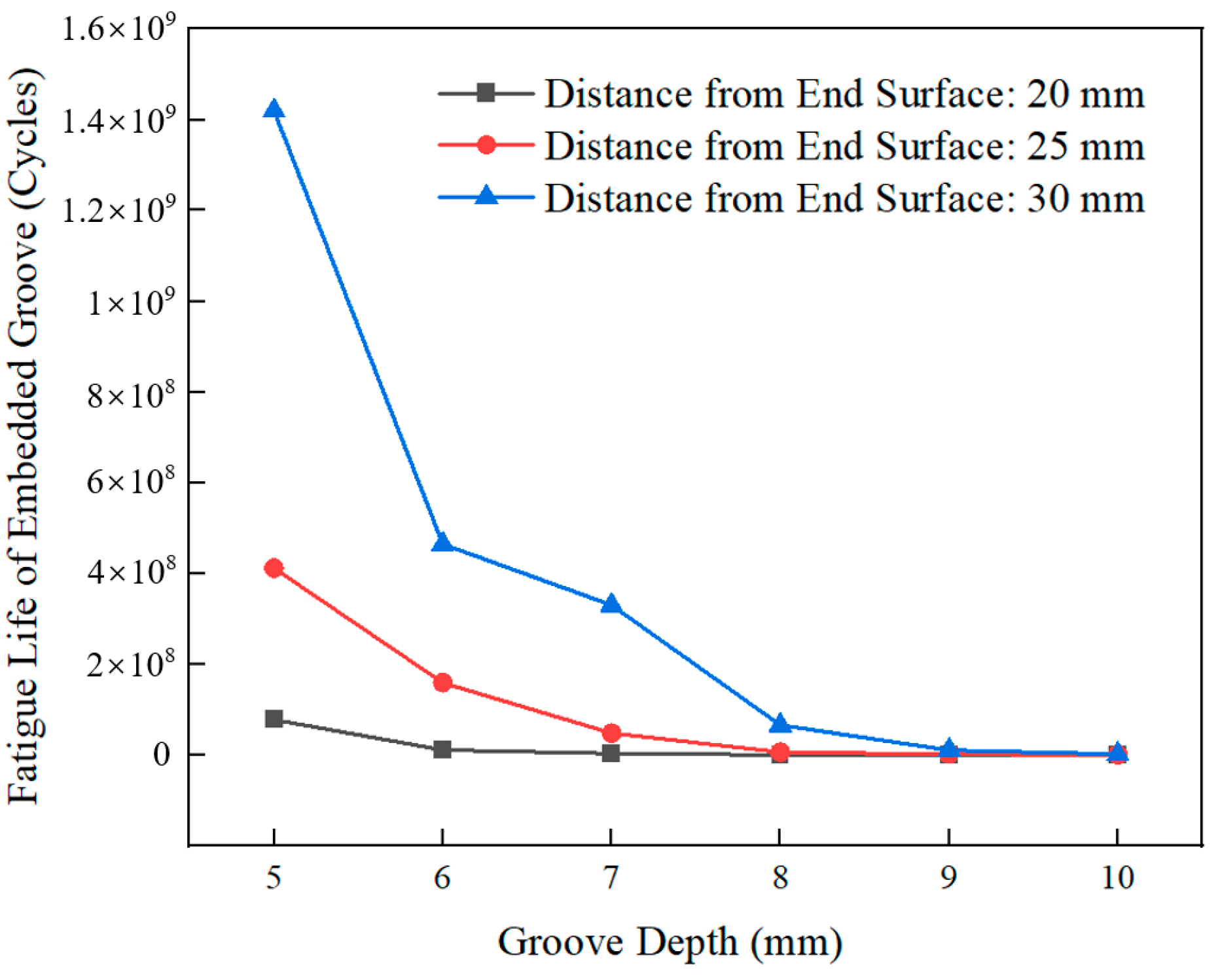
- Through fatigue life analysis, it was identified that an excessive slot depth negatively affects bearing fatigue life, as demonstrated in the groove depth-limit diagram. For intelligent axle box bearings, when the offset distance of the slot is 20 mm, the depth should be 5–6 mm; when the offset distance is 25 mm, the depth should be 5–7 mm; and when the offset distance is 30 mm, the depth should be 5–9 mm, ensuring that the bearing life meets design requirements.
- (4)
- To ensure that the design of intelligent axle box bearings meets structural strength and fatigue life standards, it is recommended that the embedded grooves for intelligent sensors in railway vehicle axle boxes be designed carefully. The structural strength and fatigue life should be considered comprehensively.
- (5)
- In order to improve the applicability of the model and provide more effective life prediction, detailed experimental validation studies will be the suggest direction for the future study, and the model will be modified to further apply to other types of bearings, taking into account the effects of temperature, wear and lubrication factors, and will be further extended to the variable load conditions, so as to provide data support for the design and maintenance of rolling bearings.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Li, Z.; Wang, Q.S.; Wang, R.H.; Qin, B. Dynamic characteristics analysis of double row angular contact ball bearings with different bearing configurations. J. Mech. Eng. 2025, 65, 220–231. [Google Scholar]
- Lei, C.L.; Xue, W.; Fan, G.F.; Wang, Y.; Wang, F.; Li, J.F. Dynamic modeling of angular contact ball bearings considering composite defects in inner and outer rings. J. Vib. Shock 2024, 43, 275–283. [Google Scholar] [CrossRef]
- Zhang, K.; Zhang, L.Q.; Wang, Z.; Gao, L.W. Nonlinear dynamic characteristics analysis of full ceramic angular contact ball bearing considering ball slip. J. Vib. Shock 2024, 43, 131–138+172. [Google Scholar] [CrossRef]
- Li, J.F.; Wen, B.; Tian, P.; Ma, S.J.; Yan, K. Analysis on contact state of four-point contact ball bearings for typical working conditions. Bearing 2023, 12, 26–31. [Google Scholar] [CrossRef]
- Tu, W.B.; Wang, J.M.; Yang, B.M.; Liang, J.; Luo, Y.; Zhang, G.Y. Analysis of contact characteristics of rolling bearings under load fluctuation. J. Vib. Shock 2023, 42, 227–235. [Google Scholar] [CrossRef]
- Lei, C.L.; Song, R.Z.; Fan, G.F.; Liu, K.; Xue, W.; Li, J.H. Vibration characteristics of angular contact ball bearing with local defect considering impact excitation. J. Aerosp. Power 2025, 40, 20230211. [Google Scholar] [CrossRef]
- Luo, Y.; Yang, B.M.; Tu, W.B. Dynamic modeling of the contact between cage and rolling element in rolling bearing and contact characteristics. J. Aerosp. Power 2022, 37, 2887–2895. [Google Scholar] [CrossRef]
- Chu, M.; Yang, L.C.; Wang, Z.W.; Jiang, Z.W.; Wang, Q.; Mo, J.L. Study on the effects of curve geometry parameters and braking conditions on the dynamic characteristics of train axle-box bearing. J. Mech. Eng. 2025, 61, 187–198. [Google Scholar]
- Li, Z.; Guan, X.L.; Zhong, R.; Wang, Q.S. Analysis of dynamic characteristics of angle contact bearings with combined loads. J. Mech. Eng. 2020, 56, 116–125. [Google Scholar] [CrossRef]
- Gu, J.G.; Zhang, Y.M.; Liu, H.Y. Influences of wear on dynamic characteristics of angular contact ball bearings. Meccanica 2019, 54, 945–965. [Google Scholar] [CrossRef]
- Liu, J.; Li, X.B.; Shi, Z.F. An investigation of contact characteristics of a roller bearing with a subsurface crack. Eng. Fail. Anal. 2020, 116, 104744. [Google Scholar] [CrossRef]
- Xu, H.Y.; Wang, P.F.; Ma, H.; Yang, Y.; Li, X.P.; Luo, Z.; Han, Q.K.; Wen, B.C. Dynamic behaviors and contact characteristics of ball bearings in a multi-supported rotor system under the effects of 3D clearance fit. Mech. Syst. Signal Proc. 2023, 196, 110334. [Google Scholar] [CrossRef]
- Tonazzi, D.; Komba, E.H.; Massi, F.; Le, J.G.; Coudert, J.B.; Maheo, Y.; Berthier, Y. Numerical analysis of contact stress and strain distributions for greased and ungreased high loaded oscillating bearings. Wear 2017, 376, 1164–1175. [Google Scholar] [CrossRef]
- Shah, D.B.; Patel, K.M.; Trivedi, R.D. Analyzing Hertzian contact stress developed in a double row spherical roller bearing and its effect on fatigue life. Ind. Lubr. Tribol. 2016, 68, 361–368. [Google Scholar] [CrossRef]
- Talbot, D.; Li, S.; Kahraman, A. Prediction of mechanical power loss of planet gear roller bearings under combined radial and moment loading. J. Mech. Des. 2013, 135, 121007. [Google Scholar] [CrossRef]
- Liu, J.; Tang, C.K.; Wu, H.; Xu, Z.D.; Wang, L.F. An analytical calculation method of the load distribution and stiffness of an angular contact ball bearing. Mech. Mach. Theory 2019, 142, 103597. [Google Scholar] [CrossRef]
- Guo, L.; Yu, Y.X.; Chen, Z.G.; Liu, Y.Q.; Gao, H.L. Study on dynamic characteristics of urban rail transit vehicle considering faulty axle-box bearings under variable speeds. Mech. Syst. Signal Proc. 2024, 206, 110849. [Google Scholar] [CrossRef]
- Wang, M.K.; Yan, K.; Tang, Q.; Guo, J.D.; Zhu, Y.S.; Hong, J. Dynamic modeling and properties analysis for ball bearing driven by structure flexible deformations. Tribol. Int. 2023, 179, 108163. [Google Scholar] [CrossRef]
- Yu, A.D.; Huang, H.Z.; Li, Y.F.; Yang, W.X.; Deng, Z.M. A modified nonlinear fatigue damage accumulation model for life prediction of rolling bearing under variable loading conditions. Fatigue Fract. Eng. Mater. Struct. 2022, 45, 852–864. [Google Scholar] [CrossRef]
- Paulson, N.R.; Evans, N.E.; Bomidi, J.A.R.; Sadeghi, F.; Evans, R.D.; Mistry, K.K. A finite element model for rolling contact fatigue of refurbished bearings. Tribol. Int. 2015, 85, 1–9. [Google Scholar] [CrossRef]
- Warda, B.; Chudzik, A. Effect of ring misalignment on the fatigue life of the radial cylindrical roller bearing. Int. J. Mech. Sci. 2016, 111, 1–11. [Google Scholar] [CrossRef]
- Cheng, H.C.; Li, X.H.; Ma, G.H.; Shi, X.F.; Yang, Z. Fatigue life and fatigue reliability mechanism of ball bearings. J. Mech. 2024, 40, 79–92. [Google Scholar] [CrossRef]
- Li, H.F.; Wei, J.L.; Li, S.H.; Liu, Y.Q.; Gu, X.H.; Liu, Z.C.; Yang, S.P. Fatigue life prediction of high-speed train bearings based on the generalized linear cumulative damage theory. Fatigue Fract. Eng. Mater. Struct. 2023, 46, 2112–2120. [Google Scholar] [CrossRef]
- Jin, J.W.; Kang, K.W.; Lee, S. Fatigue analysis for automotive wheel bearing flanges. Int. J. Precis. Eng. Man. 2023, 24, 621–628. [Google Scholar] [CrossRef]
- Yu, A.D.; Li, Y.F.; Huang, H.Z.; Tong, H.; Diao, Q. Probabilistic fatigue life prediction of bearings via the generalized polynomial chaos expansion. J. Mech. Sci. Technol. 2022, 36, 4885–4894. [Google Scholar] [CrossRef]
- Heng, X.; Wang, A.L.; Zhang, H.B.; Yin, Y.J. Research on the dynamic variation law of the discontinuous characteristics of the curvic coupling of aero-engine rotors under working conditions. Eng. Sci. Technol. Int. J. 2024, 59, 101870. [Google Scholar] [CrossRef]
- Cong, T.; Wang, J.R.; He, J.T.; Liu, Y.J.; Chen, Y.; Liu, F.L.; Li, L. Microstructure evolution and fatigue crack initiation life prediction of actual failed bearings under GRCF conditions. Eng. Fail. Anal. 2025, 169, 109148. [Google Scholar] [CrossRef]
- Jiang, Y.; Zhu, T.Y.; Deng, S. Combined analysis of stiffness and fatigue life of deep groove ball bearings under interference fits, preloads and tilting moments. J. Mech. Sci. Technol. 2023, 37, 539–553. [Google Scholar] [CrossRef]
- Zhou, X.W. Mechanical Characterization and Testing of Double Row Tapered Roller Bearings. Ph.D. Thesis, Dalian University of Technology, Dalian, China, 2021. [Google Scholar]
- ISO 281; Rolling Bearings—Dynamic Load Ratings and Rating Life. The International Organization for Standardization: Geneva, Switzerland, 2007.
- Pan, B.L.; Yang, X.K.; Zhao, F.W. Influence degree research of typical service conditions to fatigue damage of axle-box bearing for high-speed railway. Railw. Locomot. Car 2022, 42, 1–7. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Value |
| Outer diameter | 240 mm | |
| Inner diameter | 130 mm | |
| Number of rolling elements | 38 | |
| Effective contact length | 52.04 mm | |
| Outer contact angle | 10.00° | |
| Inner contact angle | 7.57° | |
| Half taper angle | 1.215° | |
| Small-end diameter of roller | 24.46 mm | |
| Large-end diameter of roller | 26.67 mm |
| Parameter | ||
|---|---|---|
| 1 | ||
| 0.67 | ||
| 0.67 | ||
| 1 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, L.; Hu, C.; Hu, L.; Liu, F.; Tang, H. An Investigation on the Mechanical Characteristics of Railway Locomotive Axle Box Bearings with Sensor-Embedded Slots. Machines 2025, 13, 358. https://doi.org/10.3390/machines13050358
Wang L, Hu C, Hu L, Liu F, Tang H. An Investigation on the Mechanical Characteristics of Railway Locomotive Axle Box Bearings with Sensor-Embedded Slots. Machines. 2025; 13(5):358. https://doi.org/10.3390/machines13050358
Chicago/Turabian StyleWang, Longkai, Can Hu, Lin Hu, Fengyuan Liu, and Hongbin Tang. 2025. "An Investigation on the Mechanical Characteristics of Railway Locomotive Axle Box Bearings with Sensor-Embedded Slots" Machines 13, no. 5: 358. https://doi.org/10.3390/machines13050358
APA StyleWang, L., Hu, C., Hu, L., Liu, F., & Tang, H. (2025). An Investigation on the Mechanical Characteristics of Railway Locomotive Axle Box Bearings with Sensor-Embedded Slots. Machines, 13(5), 358. https://doi.org/10.3390/machines13050358