
Fatigue Damage Assessment of a Metro Vehicle Bogie Frame Based on Measured Field Load

Abstract
1. Introduction
2. Calibration and Field Test Methods
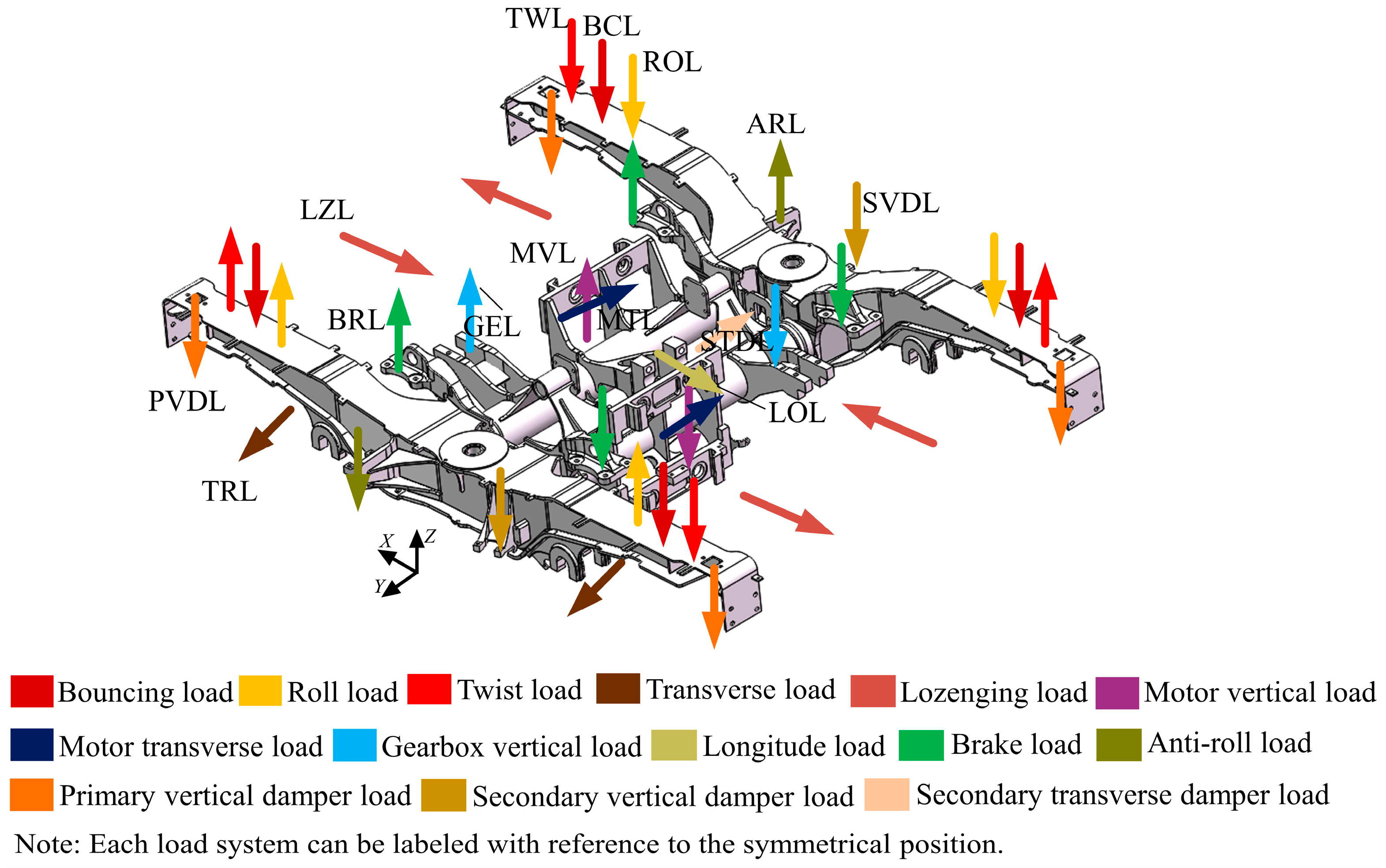
2.1. Load Series Description
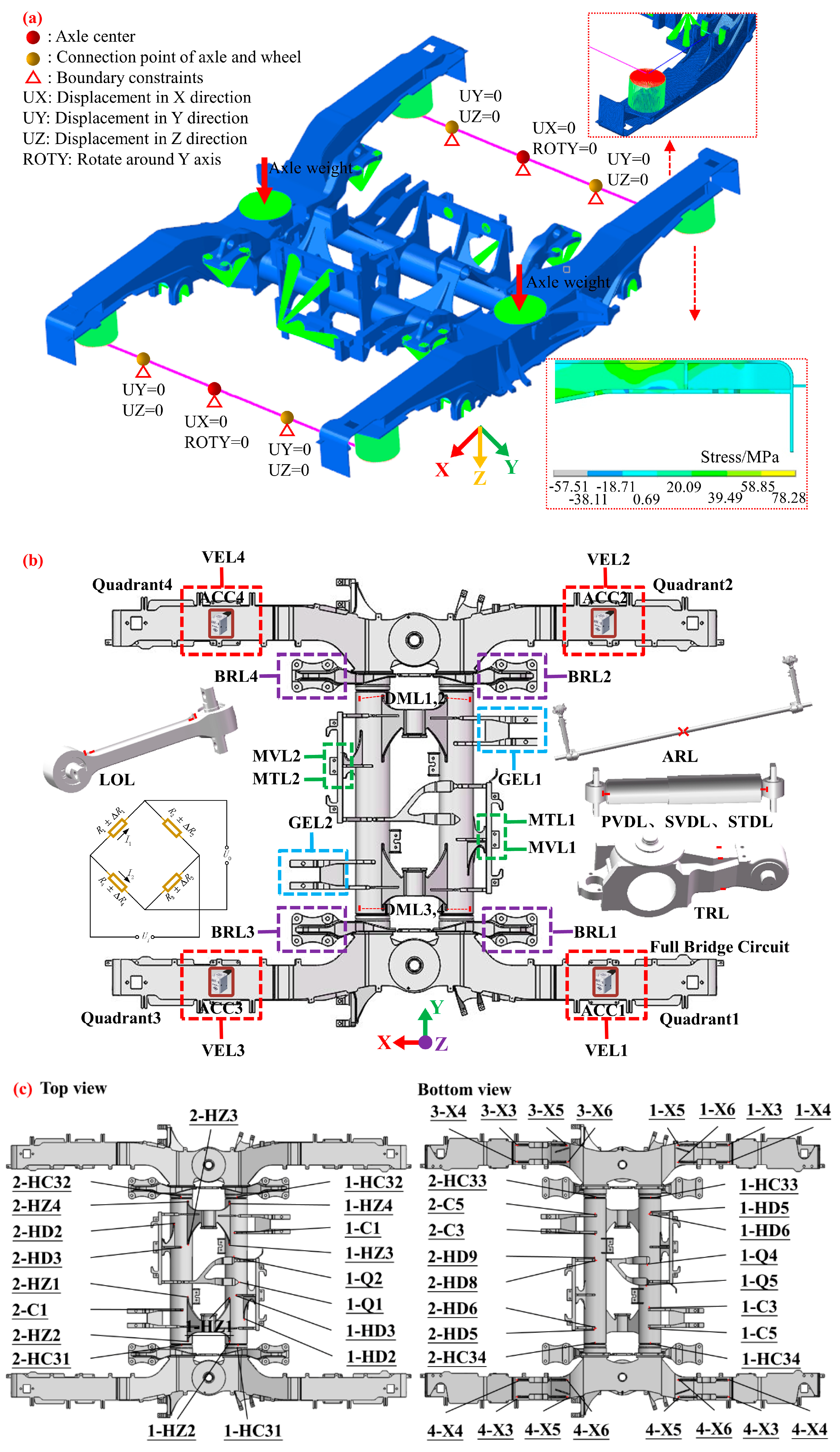
2.2. Measurement Points
2.3. Calibration Method
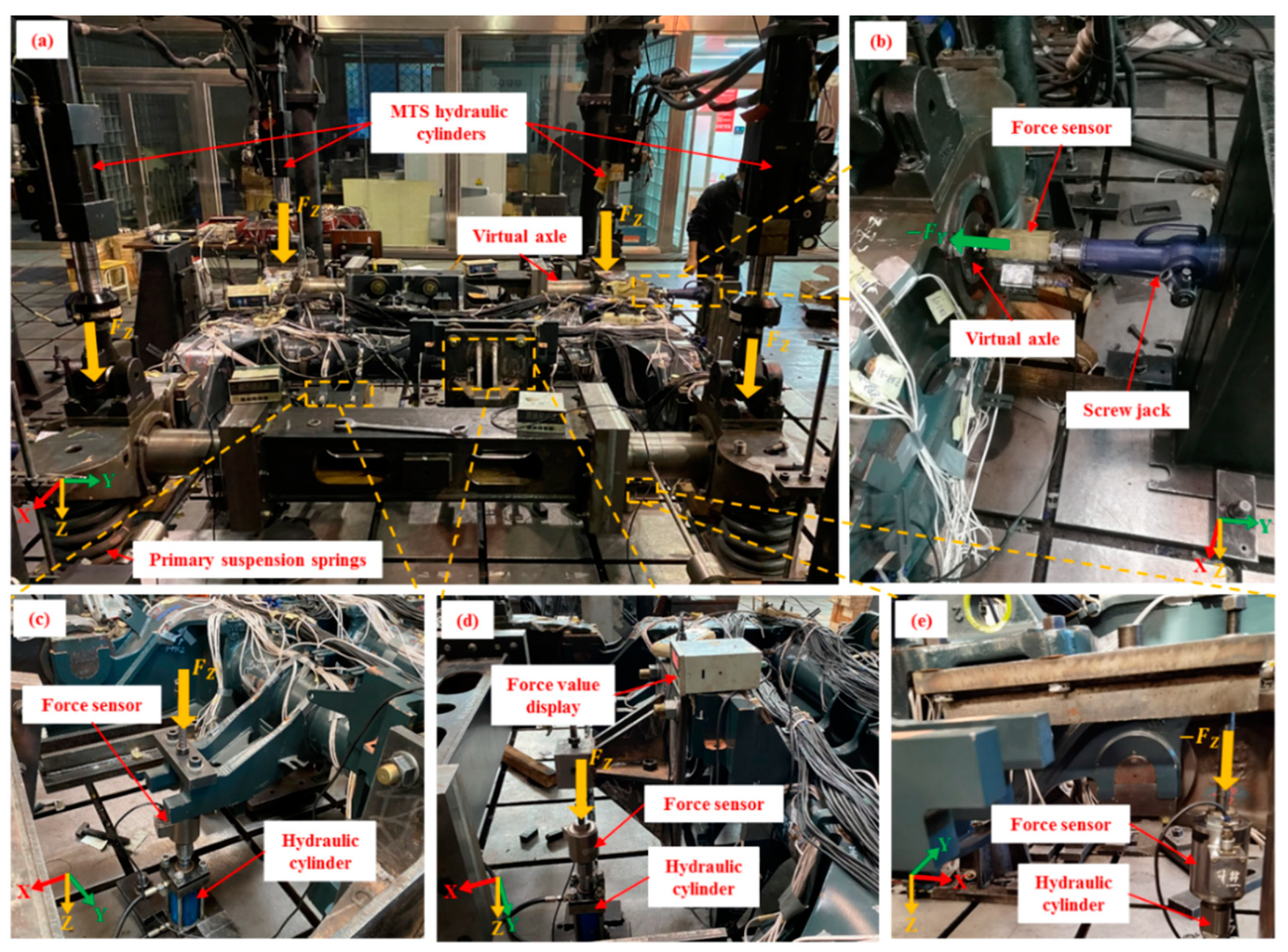
2.4. Field Test
3. Resonant Load Signal Processing Method
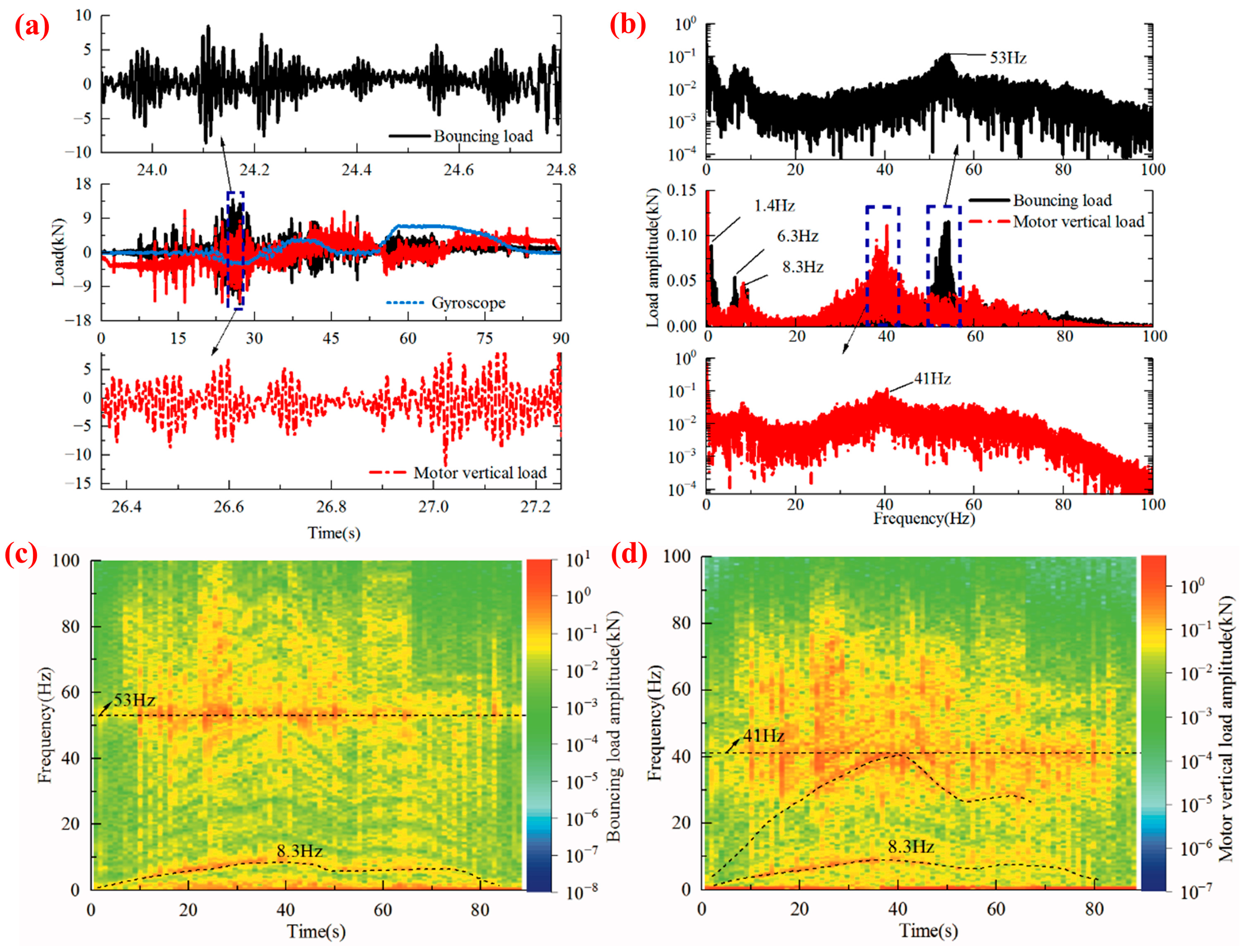
3.1. Load Signal Amplification Phenomenon
3.2. Load Resonance Frequency Band Optimization
3.3. Load Optimization Effect Analysis
4. Fatigue Damage Assessment
5. Conclusions
- (1)
- According to the motion characteristics and deformation mode of the B-type metro vehicle bogie, the frame load was divided into 14 types. The corresponding strain gauge sensors were designed for different deformation types of the load system. The load recognition matrix and fatigue key point transfer matrix were obtained through the calibration test bench. Subsequently, the high-precision force measuring frame was developed and the actual line test was carried out to obtain the load-time and fatigue key point stress-time histories;
- (2)
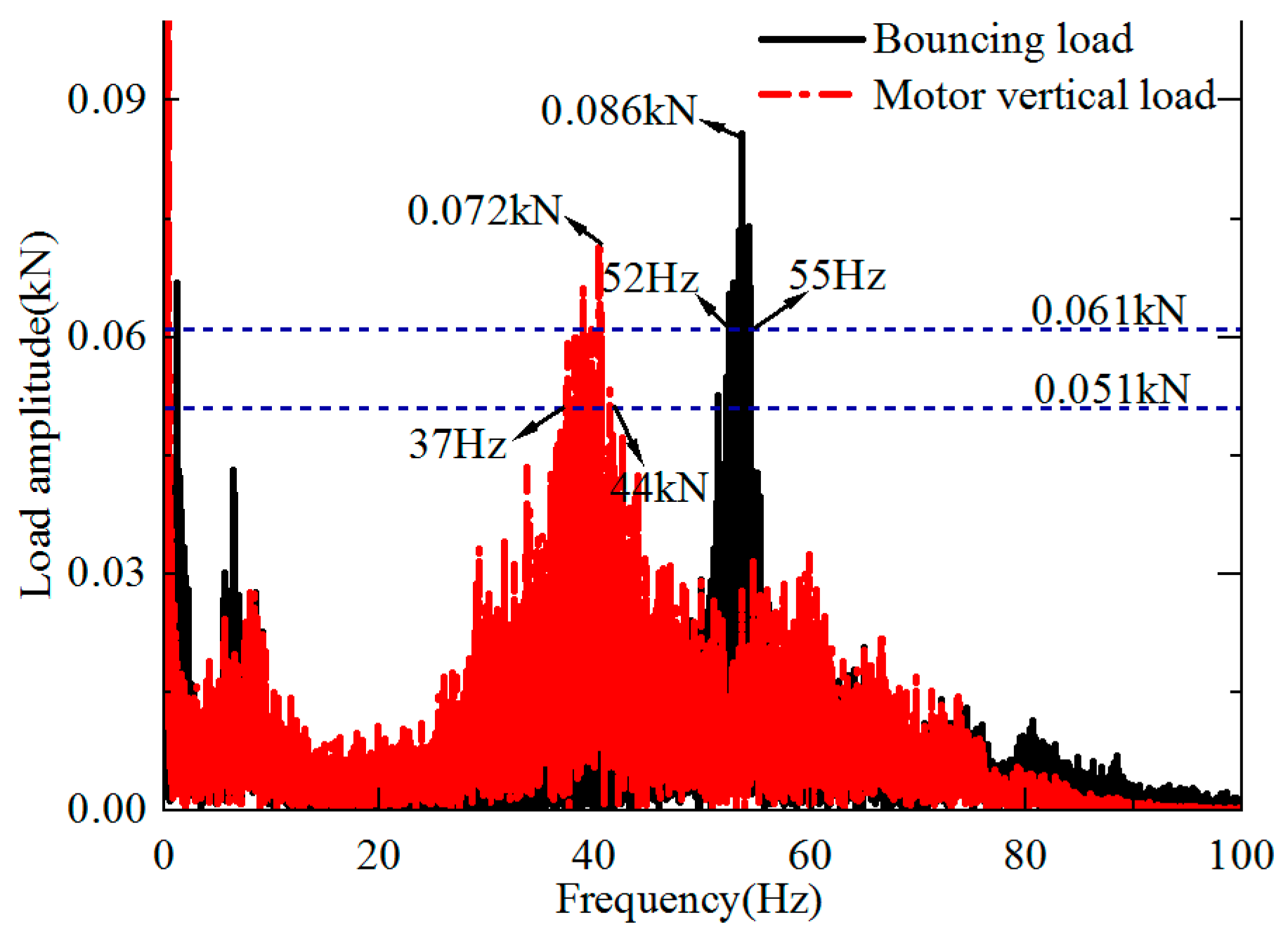
- The load amplitudes near the resonant modes were quantized directly in the frequency domain by the second-order system, and the key parameters to quantify the load amplitude components were obtained as the damping and frequency ratios. The low-order modal damping ratios of the frame were determined based on the least-squares complex frequency domain method (first order: 1.96%; second order: 1.77%), and the resonance influence ranges were delineated based on the half-power bandwidths of the load amplitudes (bouncing load: 51–55 Hz; motor vertical load: 37–45 Hz);
- (3)
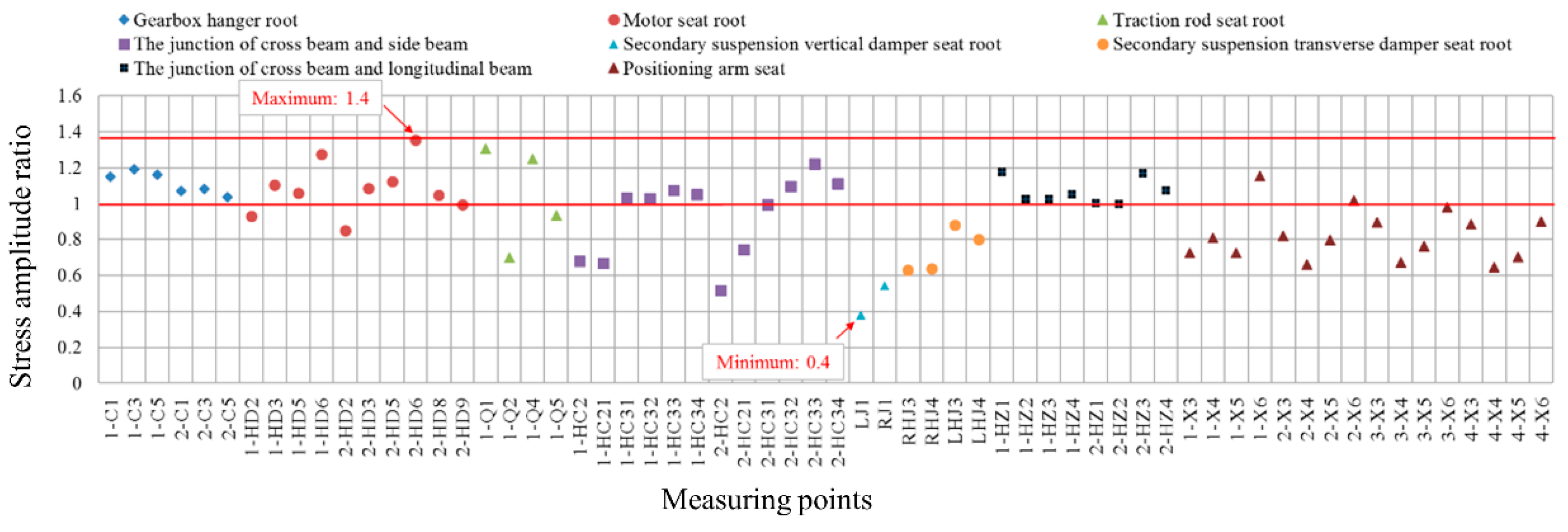
- The fatigue key point stress calculated using the processed load was consistent with the overall trend of the measured stress in the time-frequency domain, and the overall ratio of the equivalent stress amplitude was between 0.8 and 1.1. The degree of change in the amplitude of the treated bouncing load and the tested bouncing acceleration in the resonance region between 51 and 55 Hz were in good agreement. The results verify the effectiveness of the load amplitude component optimization method;
- (4)
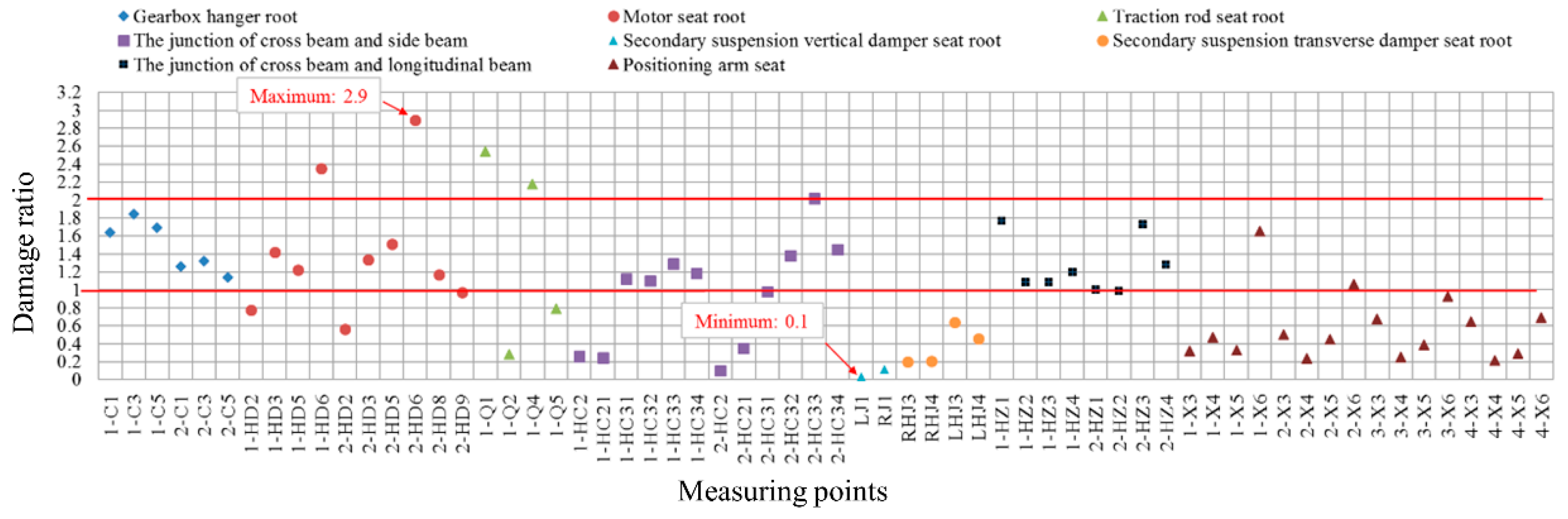
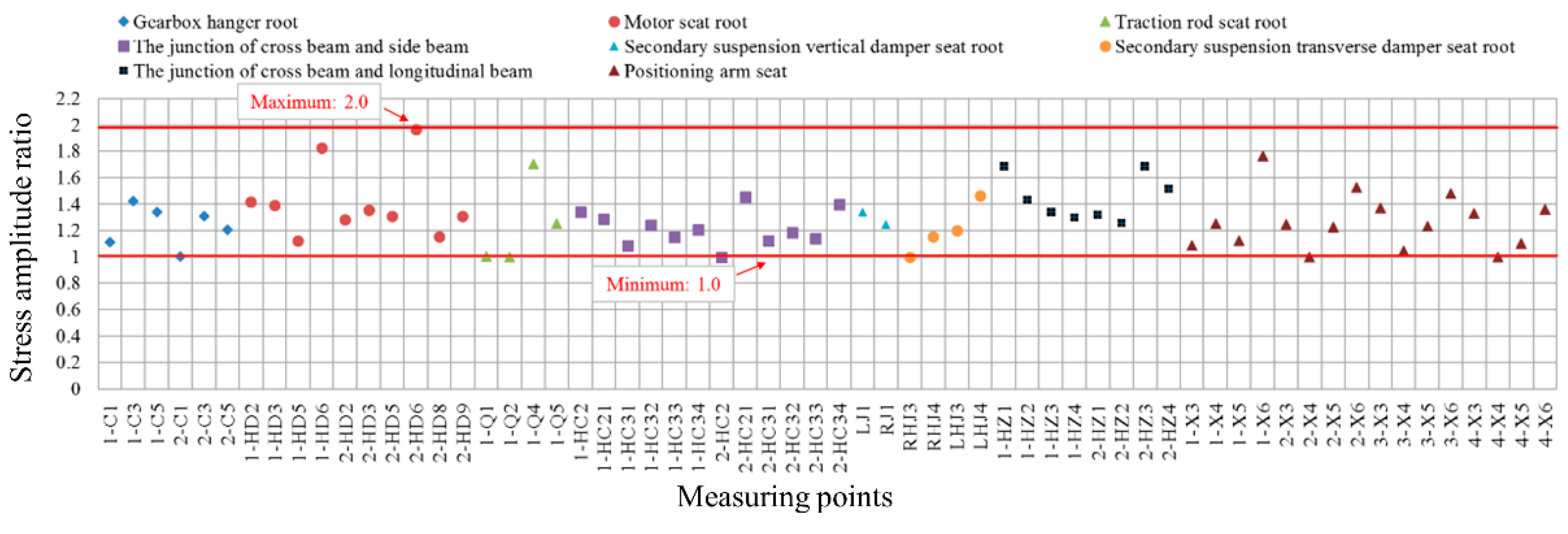
- The measured load was directly used for the damage assessment of all fatigue key points of the frame, which could easily lead to the poor fatigue reliability of the frame. Based on the multi-objective optimization of the genetic algorithm, the damage consistency calibration load was obtained. The equivalent stress amplitude of all fatigue key points of the frame was calculated using the calibration load. Finally, the ratio of the equivalent and measured stress amplitude of the frame was found to be in the range of 1.0–2.0, which fulfilled the requirements of designing the reliability and fatigue assessment of the frame.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- EN 13749; Railway Applications—Wheelsets and Bogies—Method of Specifying the Structural Requirements of Bogie Frames. CEN: Brussels, Belgium, 2011.
- UIC 615-4; Ed. 2: Motive Power Units—Bogies And Running Gear—Bogie Frame Structure Strength Tests. UIC: Paris, France, 2003.
- JIS E4207:2004; Test Methods of Static Load for Truck Frames and Truck Bolsters of Railway Rolling Stock. Standards Association: Tokyo, Japan, 2004.
- Zhang, Z.; Ru, C.; Li, Q. Study on a novel field-measured load calibration method for the life assessment of the metro bogie frame. Eng. Fail. Anal. 2022, 136, 106209. [Google Scholar] [CrossRef]
- Wang, B.J.; Li, Q.; Ren, Z.S.; Sun, S.G. Improving the fatigue reliability of metro vehicle bogie frame based on load spectrum. Int. J. Fatigue 2020, 132, 105389. [Google Scholar] [CrossRef]
- Yuan, Z.; Chen, X.; Ma, L.; Li, Q.; Sun, S.; Wei, Y. A segmented load spectrum model for high-speed trains and its inflection stress as an indicator for line quality. Int. J. Fatigue 2021, 148, 106221. [Google Scholar] [CrossRef]
- Li, J.; Ren, Z.; Wu, Y.; An, R. Fatigue damage assessment of high-speed train bogie frame load spectra based on phase reconstruction. Eng. Fail. Anal. 2024, 159, 108008. [Google Scholar] [CrossRef]
- Liu, R.; Dobriban, E.; Hou, Z.; Qian, K. Dynamic Load Identification for Mechanical Systems: A Review. Arch. Comput. Methods Eng. 2022, 29, 831–863. [Google Scholar] [CrossRef]
- Wang, J.; Wang, C.; Zhong, B.; Wang, T.; Guo, W.; Chen, W.; Sun, C. Uncorrelated multi-sources load identification in frequency domain based on improved Tikhonov regularization method. Int. J. Appl. Electromagn. Mech. 2016, 52, 983–990. [Google Scholar] [CrossRef]
- Gou, J.; Guo, W.; Wang, C.; Luo, W. A multi-strategy improved particle swarm optimization algorithm and its application to identifying uncorrelated multi-source load in the frequency domain. Neural Comput. Appl. 2017, 28, 1635–1656. [Google Scholar] [CrossRef]
- Gupta, D.K.; Dhingra, A.K. Input load identification from optimally placed strain gages using D-optimal design and model reduction. Mech. Syst. Signal Process. 2013, 40, 556–570. [Google Scholar] [CrossRef]
- Sun, Y.; Luo, L.; Chen, K.; Qin, X.; Zhang, Q. A time-domain method for load identification using moving weighted least square technique. Comput. Struct. 2020, 234, 106254. [Google Scholar] [CrossRef]
- Li, K.; Liu, J.; Han, X.; Jiang, C.; Zhang, D. Distributed dynamic load identification based on shape function method and polynomial selection technique. Inverse Probl. Sci. Eng. 2017, 25, 1323–1342. [Google Scholar] [CrossRef]
- Feng, W.; Li, Q.; Lu, Q. Force localization and reconstruction based on a novel sparse Kalman filter. Mech. Syst. Signal Process. 2020, 144, 106890. [Google Scholar] [CrossRef]
- Feng, W.; Li, Q.; Lu, Q.; Wang, B.; Li, C. Time domain force localization and reconstruction based on hierarchical Bayesian method. J. Sound Vib. 2020, 472, 115222. [Google Scholar] [CrossRef]
- Yang, H.; Jiang, J.; Chen, G.; Zhao, J. Dynamic load identification based on deep convolution neural network. Mech. Syst. Signal Process. 2023, 185, 109757. [Google Scholar] [CrossRef]
- Zhou, J.M.; Dong, L.; Guan, W.; Yan, J. Impact load identification of nonlinear structures using deep Recurrent Neural Network. Mech. Syst. Signal Process. 2019, 133, 106292. [Google Scholar] [CrossRef]
- Wang, W.; Yan, L.; Wang, T.; Guan, S.; Zhang, C.; Zhang, Y.; Wang, D. Dynamic Load Identification Method of Rock Roadheader Using Multi Neural Network and Evidence Theory. In Proceedings of the 2016 IEEE International Conference on Mechatronics and Automation, Harbin, China, 7–10 August 2016; pp. 1238–1243. [Google Scholar]
- Tian, M.; Wang, W.; Song, L.; Song, Y.; Yan, L.; Xia, Y. A Dynamic Load Identification Method for Rock Roadheaders Based on Wavelet Packet and Neural Network. In Proceedings of the 2015 10th IEEE Conference on Industrial Electronics and Applications, Auckland, New Zealand, 15–17 June 2015; pp. 672–676. [Google Scholar]
- Ji, C.; Sun, S.; Li, Q.; Wang, W.; Ren, Z.; Yang, G. A novel method for the general application of measured load spectra to different high-speed train bogie frames based on virtual track irregularity. Measurement 2022, 198, 111369. [Google Scholar] [CrossRef]
- Ji, C.; Sun, S.; Li, Q.; Ren, Z.; Yang, G. Realistic fatigue damage assessment of a high-speed train bogie frame by damage consistency load spectra based on measured field load. Measurement 2020, 166, 108164. [Google Scholar] [CrossRef]
- Zou, H.; Sun, S.; Li, Q.; Ren, Z. Analysis of the Load-Stress Response Characteristics of the Bogie Frame in Intercity Electric Multiple Unit. Chin. J. Mech. Eng. 2018, 31, 26. [Google Scholar] [CrossRef]
- Ma, S.; Sun, S.; Wang, B.; Wang, N. Estimating load spectra probability distributions of train bogie frames by the diffusion-based kernel density method. Int. J. Fatigue 2020, 132, 105352. [Google Scholar] [CrossRef]
- Ma, S.; Sun, S.; Jin, X.; Wang, N.; Wang, B. Reduction of Modal Vibration Effect in Load Identification of a Train Bogie Frame, IOP conference series. Earth Environ. Sci. 2021, 692, 22100. [Google Scholar] [CrossRef]
- Zeng, J.; Wu, P.; Hao, J. Analysis of vertical vibration reduction for railway vehicle systems. Zhongguo Tie Dao Ke Xue 2006, 27, 62. [Google Scholar]
- Maamar, A.; Abdelghani, M.; Le, T.; Gagnol, V.; Sabourin, L. Operational modal identification in the presence of harmonic excitation. Appl. Acoust. 2019, 147, 64–71. [Google Scholar] [CrossRef]
- Feng, K.; Ji, J.C.; Zhang, Y.; Ni, Q.; Liu, Z.; Beer, M. Digital twin-driven intelligent assessment of gear surface degradation. Mech. Syst. Signal Process. 2023, 186, 109896. [Google Scholar] [CrossRef]
- Zhou, Y.; Wang, X.; Que, H.; Guo, R.; Lin, X.; Jin, S.; Wu, C.; Hou, Y. Torque effect on vibration behavior of high-speed train gearbox under internal and external excitations. Railw. Eng. Sci. 2024, 32, 229–243. [Google Scholar] [CrossRef]
- Zhu, N.; Sun, S.; Li, Q.; Zou, H. Theoretical research and experimental validation of elastic dynamic load spectra on bogie frame of high-speed train. Chin. J. Mech. Eng. 2016, 29, 498–506. [Google Scholar] [CrossRef]
- Zhu, N.; Sun, S.; Li, Q.; Zou, H. Theoretical research and experimental validation of quasi-static load spectra on bogie frame structures of high-speed trains. Acta Mech. Sin. 2014, 30, 901–909. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Load Type | Nominal Value (kN) | () | |
|---|---|---|---|
| Bouncing load | 10 | 0.1 | 0.1 |
| Roll load | 5 | 0.3 | 0.1 |
| Twist load | 2 | 0.6 | 0.1 |
| Transverse load | 35 | 0.3 | 0.8 |
| Lozenging load | 14 | 0.3 | 0.3 |
| Motor vertical load | 32.5 | 39.4 | 100 |
| Motor transverse load | 25.8 | 0.4 | 0.8 |
| Gearbox vertical load | 29.4 | 0.5 | 1.1 |
| Longitude load | 23.9 | 1.8 | 3.4 |
| Brake load | 8.5 | 0.5 | 0.3 |
| Anti-roll bar load | 17 | 0 | 0 |
| Primary vertical damper load | 2 | 0 | 0 |
| Secondary vertical damper load | 0.8 | 0.2 | 0.1 |
| Secondary transverse damper load | 1.6 | 0 | 0 |
| Modal Order | Modal Frequency | Vibration Pattern |
|---|---|---|
| Mode 1 | 41 | Frame twist |
| Mode 2 | 51 | Reverse twist of frame |
| Mode 3 | 73 | Sagging of frame side beams |
| Mode 4 | 78 | Alternate coaxial sides of the frame deformed inward and outward |
| Mode 5 | 79 | Lozenging deformation |
| Mode 6 | 83 | Reverse transverse bending of frame side beams |
| Mode 7 | 95 | Same direction transverse bending of frame side beams |
| Mode 8 | 102 | First-order sag bends in the same direction and first-order transverse bends in the opposite direction of the frame side beams |
| Measuring Point | Installation Location | Quadrant Description |
|---|---|---|
| A01 | Bogie frame | Quadrant1 |
| A02 | Bogie frame | Quadrant2 |
| A03 | Bogie frame | Quadrant3 |
| A04 | Bogie frame | Quadrant4 |
| A05 | Air spring seat | Air spring seat near frame quadrant 1 |
| A06 | Air spring seat | Air spring seat near frame quadrant 3 |
| B01 | Brake seat | Brake seat near frame quadrant 1 |
| B02 | Brake seat | Brake seat near frame quadrant 2 |
| B03 | Brake seat | Brake seat near frame quadrant 3 |
| B04 | Brake seat | Brake seat near frame quadrant 4 |
| M01 | Motor | Above the motor mass center near frame quadrant 2 |
| M02 | Motor | Above the motor mass center near frame quadrant 4 |
| G01 | Gearbox | Gearbox near frame quadrant 1 |
| G02 | Gearbox | Gearbox near frame quadrant 3 |
| Load Spectrum | BCL | ROL | TWL | TRL | LZL | MVL | MTL |
| Calibration coefficient | 1.7 | 1.2 | 0.5 | 0.5 | 2.0 | 0.5 | 5.0 |
| Load Spectrum | GEL | LOL | BRL | ARL | PVDL | SVDL | STDL |
| Calibration coefficient | 1.4 | 0.6 | 0.5 | 2.6 | 5.0 | 4.8 | 1.1 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, Y.; Ren, Z. Fatigue Damage Assessment of a Metro Vehicle Bogie Frame Based on Measured Field Load. Machines 2025, 13, 306. https://doi.org/10.3390/machines13040306
Wu Y, Ren Z. Fatigue Damage Assessment of a Metro Vehicle Bogie Frame Based on Measured Field Load. Machines. 2025; 13(4):306. https://doi.org/10.3390/machines13040306
Chicago/Turabian StyleWu, Yangmin, and Zunsong Ren. 2025. "Fatigue Damage Assessment of a Metro Vehicle Bogie Frame Based on Measured Field Load" Machines 13, no. 4: 306. https://doi.org/10.3390/machines13040306
APA StyleWu, Y., & Ren, Z. (2025). Fatigue Damage Assessment of a Metro Vehicle Bogie Frame Based on Measured Field Load. Machines, 13(4), 306. https://doi.org/10.3390/machines13040306