Abstract
The characteristics of the degrees of freedom (DOFs) of the 3-UPU parallel mechanisms (PMs) are closely related to the orientations of the ending R joints fixed connected with the platforms. The orientations of the ending revolute (R) joints in the Tsai 3-UPU PM cannot naturally realize three translational DOFs. First, this paper gives and proves the geometric conditions of the ending R joint fixed to the platforms that can naturally ensure three translational DOFs of the 3-UPU PMs. Second, based on the common motion/force index and good transmission workspace volume of the 3-UPU translational PMs, the performance map of the PMs is drawn, and the corresponding optimization design area of the PMs is obtained. Finally, combined with the obtained optimization design area, in view of the differences in the constraint and stiffness performance of the 3-UPU translational PMs, the multi-objective optimization is carried out using the game theory algorithm, and the orientations of the ending R joints for the 3-UPU translational PMs with good constraint and stiffness performance are obtained.
1. Introduction
The 3-DOF PMs with pure translational DOFs have high research value because of their particular kinematical properties. Clavel [1] first proposed the Delta PM, which is a widely known example of pure translational PMs. Chung-Ching et al. [2] proposed the translational PMs with doubly planar limbs based on the Lie group algebraic properties of the displacement set. Shen et al. [3] studied a 3-DOF translational PM with partial motion decoupling and analytic direct kinematics and analyzed its conditions of the singular configurations. Niu et al. [4] studied the type synthesis method for three translational parallel mechanisms considering velocity/force anisotropy. Zhang et al. [5] proposed a new jerk-optimal force and motion synchronous planning method for the 3-DOF translational force-controlled end-effector based on a 3-P(UU)2 PM. Lin et al. [6] designed a translational PM that uses only revolute joints and studied its kinematics, workspace, and singularity. For this class of PMs, the analysis of the 3-UPU translational PMs has become an interesting topic in recent years. Tsai et al. [7,8,9] first proposed and studied the 3-UPU PM with pure translational DOFs. Gregorio et al. [10] analyzed the mobility of the 3-UPU PM assembled for obtaining a pure translation motion and presented the analytic form and geometric interpretation of the singularity. Han et al. [11] studied the causes of gross self-motions of a 3-UPU PM and found that this type of PM is extremely sensitive to clearances and manufacturing errors in the bearing-shaft assembly. Lu et al. [12] proposed an asymmetric 3-UPU translational PM. Hu et al. [13] compared this PM with Tsai 3-UPU PM considering the singular configuration, constrained force/torque situations, and stiffness. Bhutani et al. [14] discussed the design considerations and sensitivity analysis of a 3-UPU translational PM with excellent practical feasibility and developed the prototype of this PM. Gan et al. [15] presented a metamorphic PM which can switch its motion between pure translational and pure rotational motions and investigated the characteristics and singularity of the PM. Kong et al. [16] presented a systematic classification of 3-UPU translational PMs based on constraint singularity loci using Gröbner Cover. Hassani et al. [17] derived a general explicit implicit dynamic model of the translational 3-UPU PM based on the principle of virtual work. Tsai et al. [18] proposed analytical joint compliance models for the translational 3-UPU PM. Zhao et al. [19] studied the kinematics and statics of a 3-UPU PM in screw coordinates. Xu et al. [20] investigated a 3-UPU wave compensation platform based on improved sliding mode control.
Through the above research, many important characteristics associated with the 3-UPU translational PMs have been revealed. However, for Tsai 3-UPU translational PM, the ending R joints in each UPU leg can not naturally keep parallel. Therefore, Tsai 3-UPU PM cannot obtain three translational DOFs naturally [13]. The condition that naturally ensures three translational DOFs of the 3-UPU PMs is still valuable work.
The performance analysis of PMs is an important research aspect of mechanisms. Motion/force transmission and constraint indices are widely used in the performance evaluation of PMs. Wang et al. [21,22] proposed the input and output motion/force transmission indices and used them for some non-redundant PMs. Meng et al. [23] proposed the modified output transmission index for high-speed PMs with articulated platforms based on the concept of equivalent transmission wrench screws. Liu et al. [24] proposed the motion/force constraint index for evaluating the constraint performance of the PMs and analyzed the constraint singularity based on this index. Marlow et al. [25] proposed a dimensionless constraint transmission index for analyzing the internal singularities of PMs with planar closed-loop subchains. Based on the constraint transmission index, Hu et al. [26] carried out a comparative study on the constraint performance of some PMs with 2R1T DOFs. Song et al. [27] analyzed the singularity and dimensional synthesis based on the motion/force transmission and constraint indices for the 3-UPU PM without parasitic motions.
The stiffness index is another important measure of PM performance. In this aspect, Huang et al. [28] developed a decomposition of a spatial stiffness matrix based on the stiffness eigenscrew problem and investigated the relationship between the eigenstiffnesses, the eigenscrews, and the stiffness matrix. Raoofian et al. [29] defined four stiffness indexes by decomposing the stiffness matrix into translational and rotational stiffness matrices, which represent the maximum and minimum values of the load resistance force/moment, respectively. Portman [30] evaluated the stiffness problem of Gough–Stewart platform by using the eigenvalues and eigenvectors of the stiffness matrix. Wu et al. [31] evaluated the linear stiffness and angular stiffness of the mechanism in the overall workspace by identifying the principal direction of the stiffness matrix. Yan et al. [32] proposed a virtual work index based on strain energy, which treats the linear and angular stiffness together to evaluate the stiffness performance distribution of Delta PM under different external load directions.
The multi-objective optimization algorithm is an effective method for obtaining PMs with good performance. Zhang et al. [33] used the particle swarm algorithm to simultaneously optimize the dexterous stiffness and reachable workspace of a bio-inspired PM. By considering the design requirements and pick-and-place trajectory, Wu et al. [34] optimized the kinematic and dynamic performances of a parallel Schönflies-motion robot with a prescribed workspace based on a non-dominated sorting genetic algorithm. Yang et al. [35] used a multi-objective optimization game algorithm (MOOGA) to optimize the parameters of the 2UPR-RPU and 2UPR-2RPU PMs considering the volume of the workspace, motion/force transmission and stiffness performance.
For the above reasons, the conditions of the R joints fixed to the platforms of the 3-UPU PMs that can naturally realize three translational DOFs are proposed and proved in this paper. For the proposed 3-UPU PMs, the orientations of the ending R joints have no effects on the kinematics but produce different constraint torque situations. Based on this feature, these PMs have the same motion/force transmission performance but different constraints and stiffness performances. For the common performance of the PMs, the atlas method is used to optimize the structure size with good motion/force transmission performance. Based on the optimized size of platforms, considering the different constraint and stiffness performance of the PMs, a multi-objective optimization is carried out to solve the optimal orientations of the ending joints on the platforms.
2. The Conditions of 3-UPU PMs Naturally Realize Pure Three Translational DOFs
2.1. The Problem in Tsai 3-UPU PM
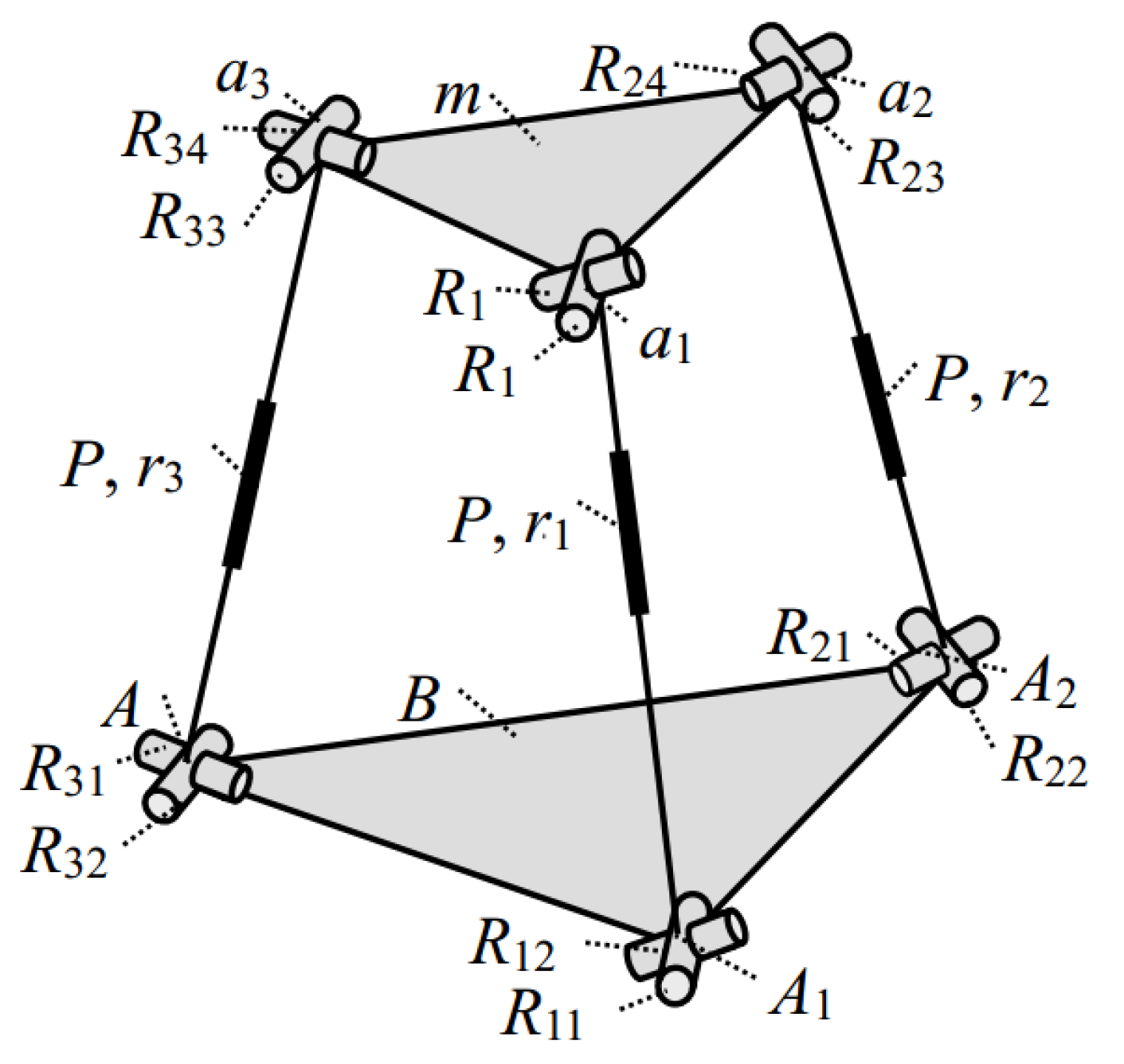
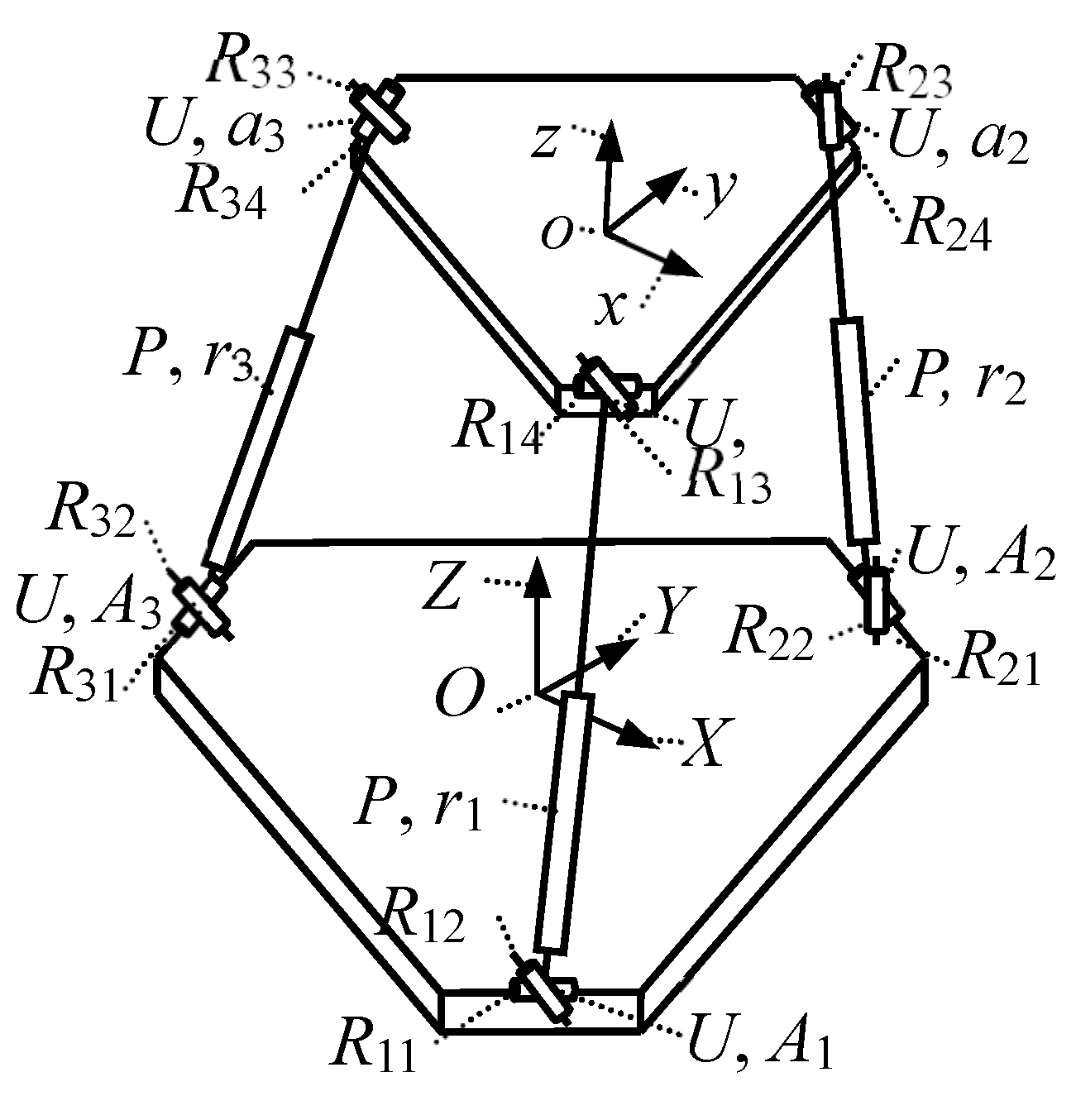
The general 3-UPU PM include a moving platform m, a base B, and three UPU-type legs ri (i = 1, 2, 3) (see Figure 1). Here, m is an isosceles triangle with three vertices ai (i = 1, 2, 3) and o as its center. B is an isosceles triangle with three vertices Ai and O as its center. B and m are similar to each other. The edges of B and m satisfy A1A2 = A2A3. In each UPU leg, there is one U joint at Ai, one P joint along ri and one U joint at ai. The U joint at Ai(ai) includes an outer R joint Ri1(Ri4) which is fixed on B(m) and one inner R joint Ri2(Ri3) which is perpendicular to the P joint. Ri1 and Ri4 are the two ending revolute joints in the UPU-leg connected to the base and moving platform, respectively. The two inner R joints are kept parallel.
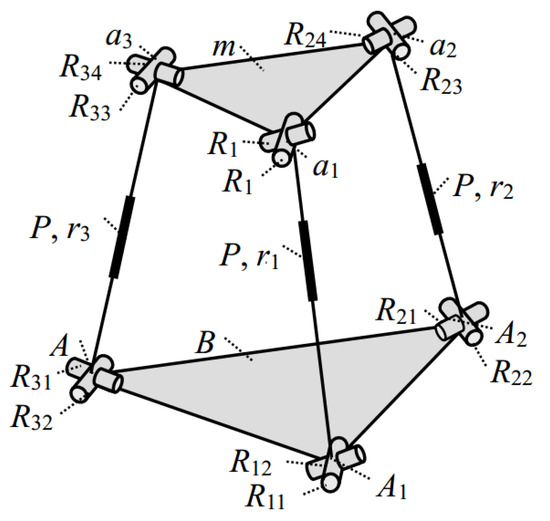
Figure 1.
The general 3-UPU PM.
In general case, the relations of Ri1, Ri2, Ri3, and Ri4 in the UPU-leg are satisfied as following:
Ri1⊥Ri2, Ri1⊥ri, Ri2||Ri3, Ri3⊥Ri4
In fact, the DOF of the 3-UPU PMs largely depends on the orientations of Ri1 and Ri4 on B and m. According to different orientations of the ending R joints, the 3-UPU PMs can achieve 3T, 3R, 2R1T and 3T1R DoFs.
For Tsai 3-UPU PM (see Figure 2), the orientations of the ending revolute joints on the platforms make it not a mechanism that can naturally realize 3T DOFs. The orientations of the ending revolute joints on the two platforms for Tsai 3-UPU PM are satisfied as follows:
R11||A2A3, R21||A1A3, R31||A1A2, R14||a2a3, R24||a1a3,R34||a1a2
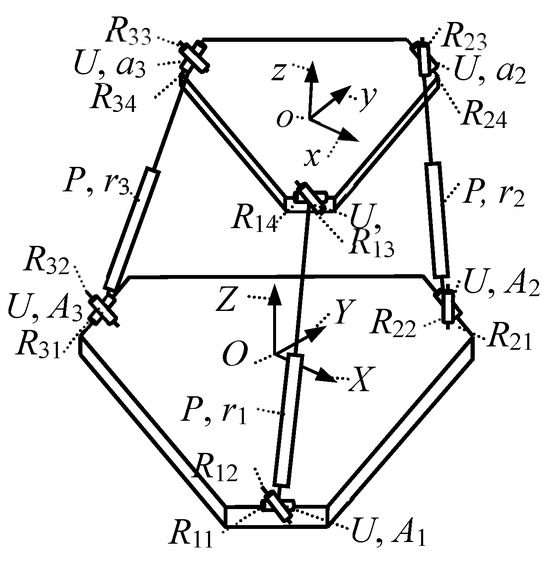
Figure 2.
Tsai 3-UPU PM.
In past research, the Tsai 3-UPU PM was regarded as 3-DOF PM with pure three translations and thus satisfies an important geometrical condition as follows [9]:
Ri1||Ri4(i = 1, 2, 3)
In fact, since Ri1 and Ri4 are the first and the last revolute joints of the UPU-type leg, respectively, there is no natural parallel relationship between the two R joints. To keep Ri1||Ri4(i = 1, 2, 3) in initial assembly is a difficult work. If Ri1||Ri4(i = 1, 2, 3) does not hold, the pure translational characteristic of Tasi 3-UPU PM will disappear.
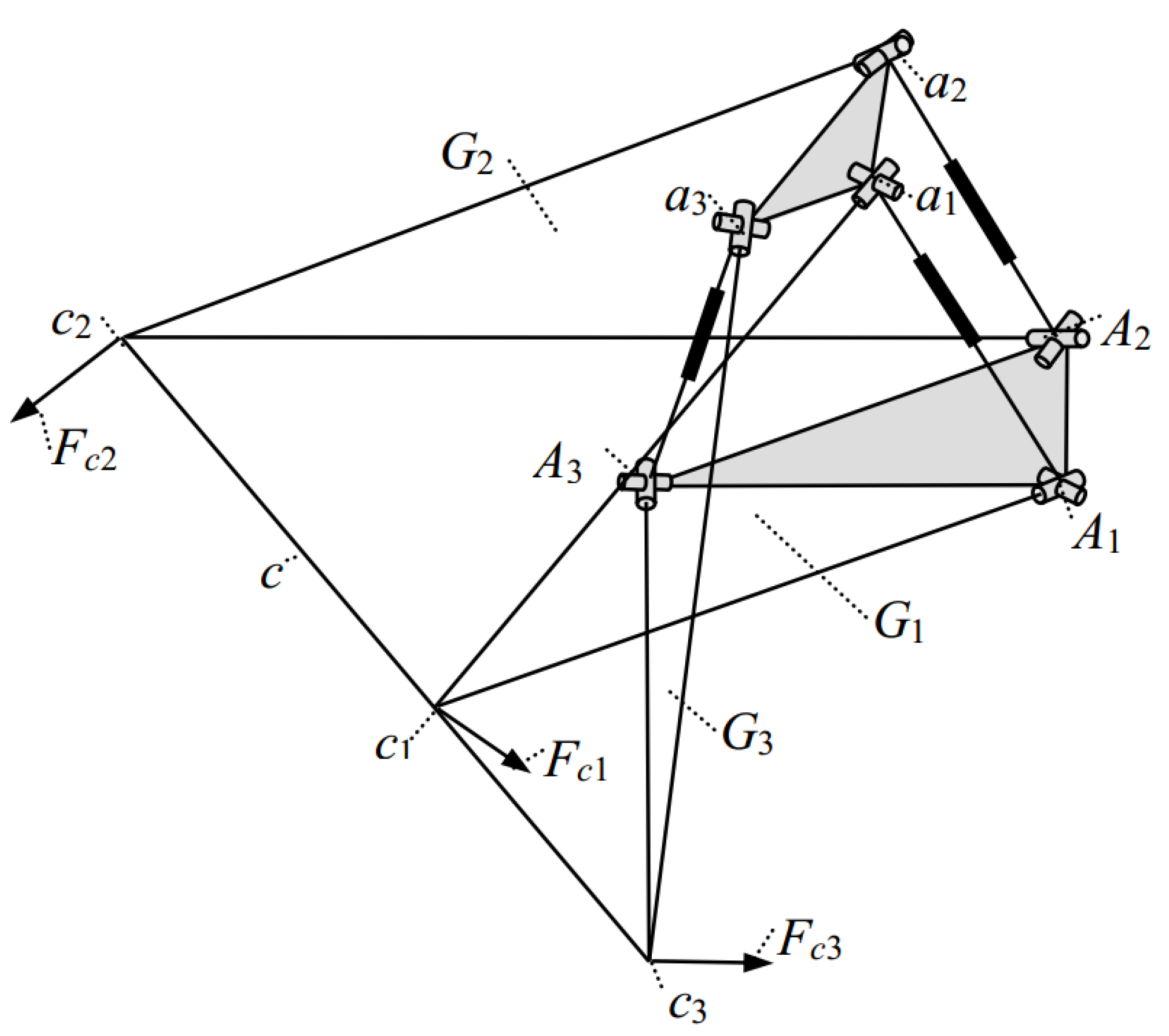
From Equation (1a), it is known that Ri1 and Ri4 must lie in the same plane for each leg. If Ri1||Ri4 is not valid at initial assembly, Ri1 and Ri4 must intersect at a point ci in each leg in general case.
It is known from Equation (1a) that Ri1, Ri4 and ri lie in the same plane Gi, which leads to
ci lies on Ri1 and Ri4, namely
From Equation (1b), it is known that
From Equations (2b) and (3a), it leads to
It is known from Equation (3b) that ci lies on the intersection line of B and m, which leads to
where c is the intersection line of B and m. It is known from Equation (3c) that c1, c2, and c3 lie on line c in general case.
According to the geometric method for determining constraint forces/torques, in the general case (see Figure 3), each leg has a constraint force Fc1, Fc2, and Fc3 that passes through the point ci and parallel with Ri2. Since the independent rotation axes and constraint forces of the PMs satisfy the intersection or parallel relationship [36], line c is generally a rotation axis of the Tsai 3-UPU PM in general case. Under this case, the Tsai 3-UPU PM has no three translational DOFs.
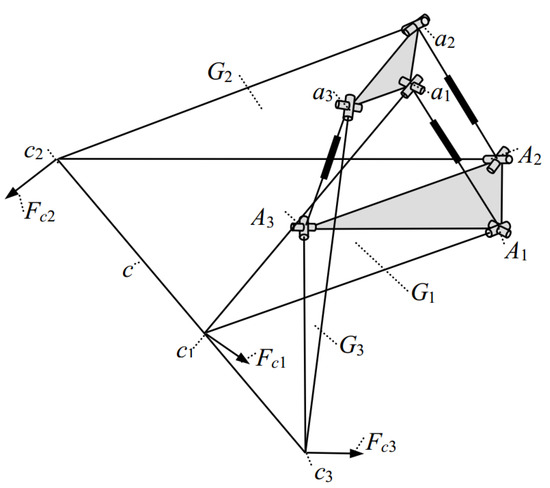
Figure 3.
Tsai’s 3-UPU PM when Ri1||Ri4 (i = 1, 2, 3) is not valid.
2.2. Geometrical Conditions for 3-UPU PM Naturally Realize Pure 3-Translational DOFs
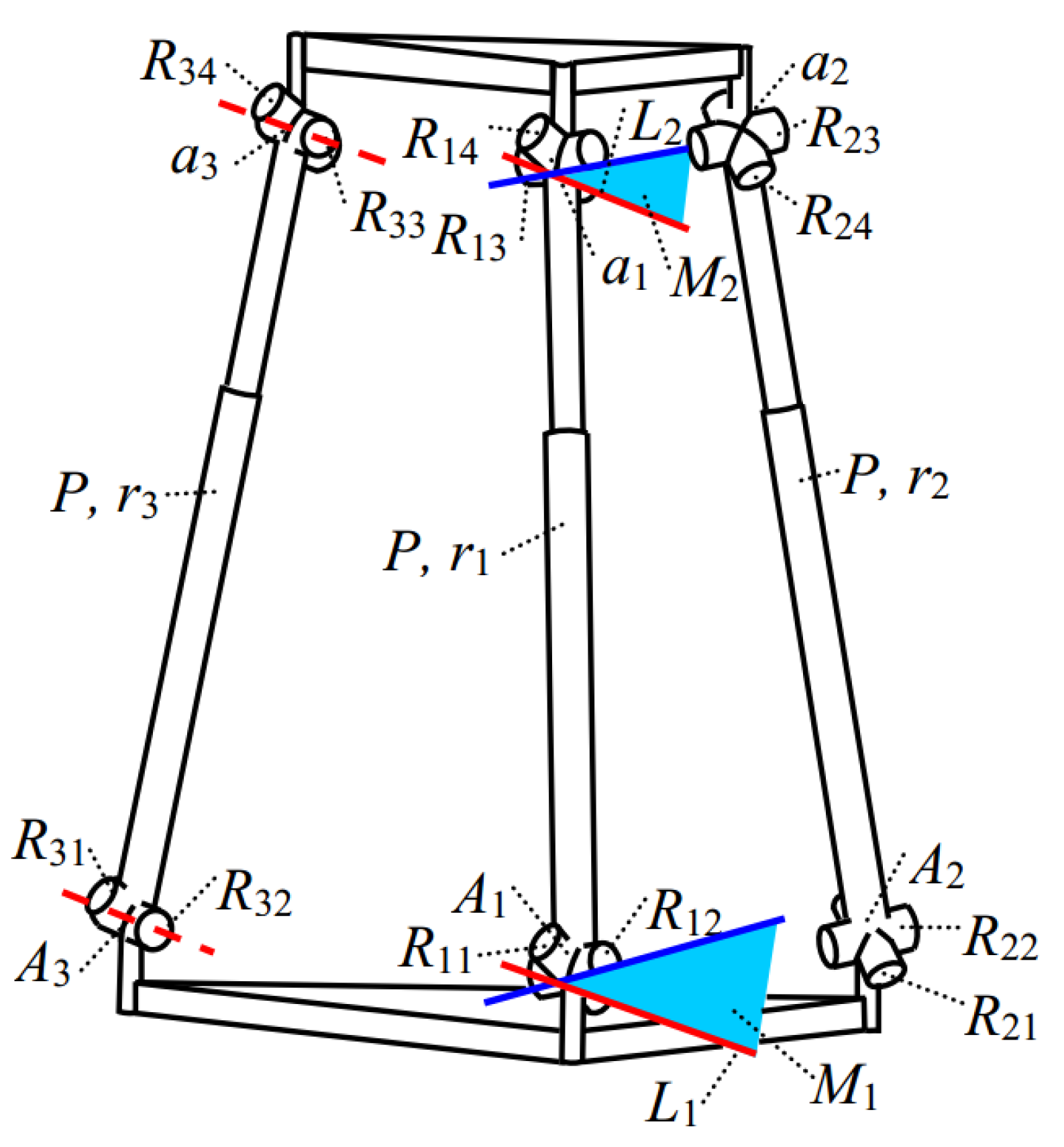
For the above issue of Tsai 3-UPU PM, this section proposes novel 3-UPU PMs that can naturally realize three translational DOFs, as shown in Figure 4. Ri1(i = 1, 2, 3) in B and Ri4 in m have identical arrangements. In addition to satisfying Equation (1a), the orientations of the ending R joints on the two platforms of the proposed 3-UPU PMs satisfy
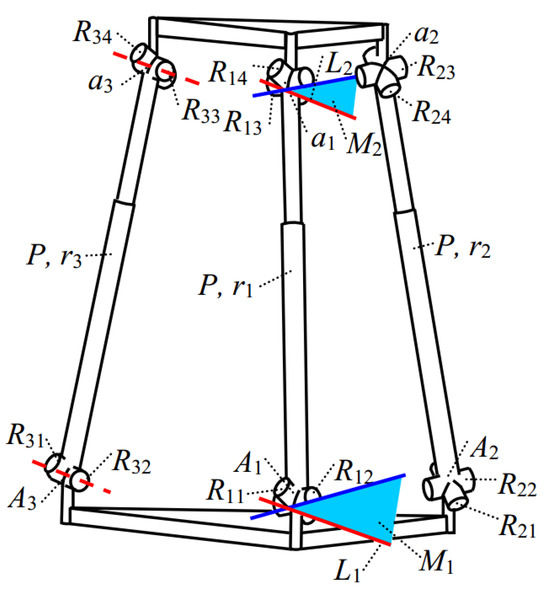
Figure 4.
The 3-UPU PM, which can naturally ensure three translational DOFs.
In what follows, we will prove this conclusion. Without losing generality, when setting the ending R joints in the first and third leg satisfy Equation (4a), we can obtain:
As shown in Figure 4, draw line L1 which passes through A1 and is parallel with R32, and line L2 which passes through a1 and is parallel with R33. Then, R12 and L1 can form plane M1, and R13 and L2 can form plane M2. L1 and L2 satisfy the following relation:
L1||L2
For the 3-UPU PMs, in general case, are satisfied.
Combined with Equations (1a) and (4c), the relation of M1 and M2 can be obtained as following:
From Equations (1a) and (4b), it leads to
From Equation (5a,b), it leads to
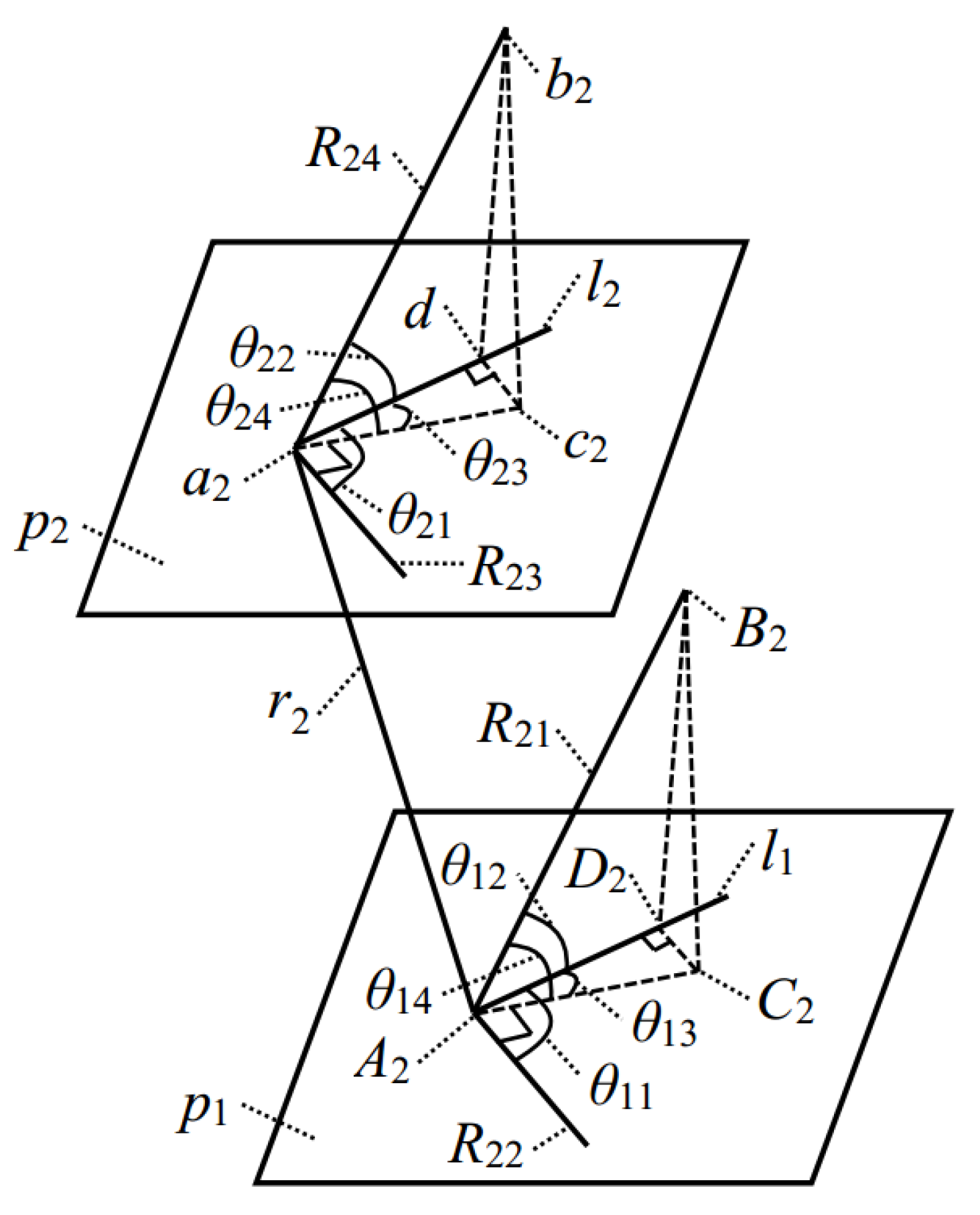
For the second UPU leg, draw line l1 which passes through A2 and parallel with R11, and line l2 which passes through a2 and parallel with R14. Then, R22 and l1 can form a plane p1, and R23 and l2 can form a plane p2, as shown in Figure 5. l1 and l2 satisfy the following relation:
l1||l2
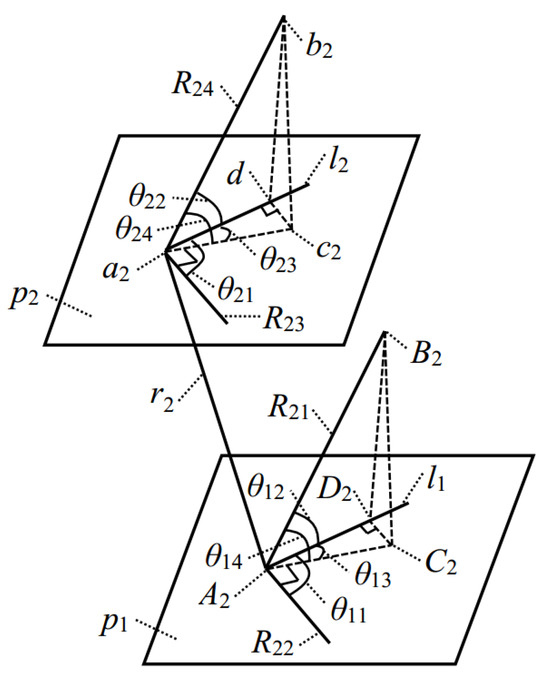
Figure 5.
Sketch of second UPU leg for proof.
Let θ11 be the angle between R22 and l1 and θ21 be the angle between R23 and l2. Without loss generality, let θ11 and θ21 be two obtuse angles.
Let θ12 be the angle between R21 and l1, and let θ22 be the angle between R24 and l2. From the symmetrical structure of Ri1 in B and Ri4 in m, it is known that
θ12 = θ22
Since R22||R23, l1||l2, there must be
θ11 = θ21
p1||p2
Let B2 be a point on line R21, line segment B2C2 is drawn which starts at B2 and ends at C2 on p1; the following equation is satisfied
B2C2⊥p1
Let b2 be a point on line R24, line segment b2c2 is drawn which starts at b2 and ends at c2 on p2; the following equation is satisfied
b2c2⊥p2
Then,
B2C2||b2c2
Since R22⊥R21, R23⊥R24, are based on three perpendicular line theorem and converse theorem, there must be
R22⊥A2C2, R23⊥a2c2
Considering R22||R23, there must be
A2B2C2||a2b2c2
Since R22⊥r2, R24⊥r2, there must be
r2 ∈ A2B2C2, r2 ∈ a2b2c2
The two parallel planes A2B2C2 and a2b2c2 have one common line which is coincident with r2; thus, A2B2C2 and a2b2c2 are coplaner. Since R21 and R24 are coplaner, R21 and R24 are in plane C2A2a2b2. From Figure 5, it can be seen that
θ11 = θ13 + 90°, θ21 = θ23 + 90°
Considering Equations (10a) and (7b), it leads to
θ13 = θ23
Based on Equations (7a) and (10b) and the minimum angle theorem, it leads to
θ14 = θ24
Thus, in plane C2A2a2b2, there must be
R21||R24
From the above analysis, it can be seen that when the conditions of Equation (4a) are satisfied, the PM will not have the situation as Tsai 3-UPU PM and can maintain three translations naturally.
Here, it should be noted that some references have been revealed that the SNU TPM has seven operation modes [11,12] and the Tsai TPM has five operation modes [13]. Many other PMs also have multiple operation modes. However, this paper does not provide a detailed analysis of the operation modes of PMs.
For the proposed 3-UPU PMs, although the orientation of the ending R joints on the platforms is different, these PMs have three translational DOFs and identical actuator layouts; thus, they have identical kinematics. However, the different orientations of the ending R joints produce different constraint torque situations [9,13] and thus produce different constraint and stiffness performances.
3. Optimization Design of the 3-DOF Translational 3-UPU PMs Based on Motion/Force Transmission Index
The proposed 3-UPU translational PMs have identical kinematics; therefore, they have identical motion/force transfer performance. This section will optimize the PMs from the aspect of the motion/force transmission index. In this paper, we only studied the cases where the ending R joints are located in the B and m since the assembly are relatively easy in these cases.
3.1. Motion/Force Transmission Performance Atlases of the 3-UPU Translational PMs
The input transmission performance index λIi of the i-th limb is the power coefficient between $Ii and $Ti, and the minimum value of λIi for all limbs is the input transmission performance index of the PMs [15], which is defined below.
For the 3-UPU translational PM, the input transmission performance index (ITI) is 1 [21].
The output twist screw $Oi is the twist screw that exists at the moving platform after locking all the remaining actuated joints except the i-th limb. The power coefficient between $Oi and the corresponding $Ti is the output transmission performance indices λOi of the i-th limb, and the minimum value of λOi for all limbs is the output transmission performance index of the PMs [17], which is defined below.
The minimum of λI and λO is used as a local transmission index to measure the motion/force transmission performance of the manipulators, which is defined below [17]:
To evaluate the global transmission performance of the manipulators, the region with LTI ≥ 0.7 is defined as the good transmission workspace (GTW), and its volume is the good transmission workspace volume (GTWV). The global transmission index (GTI) [17,22] in GTW is defined as
where W denotes the region of the GTW of the manipulator.
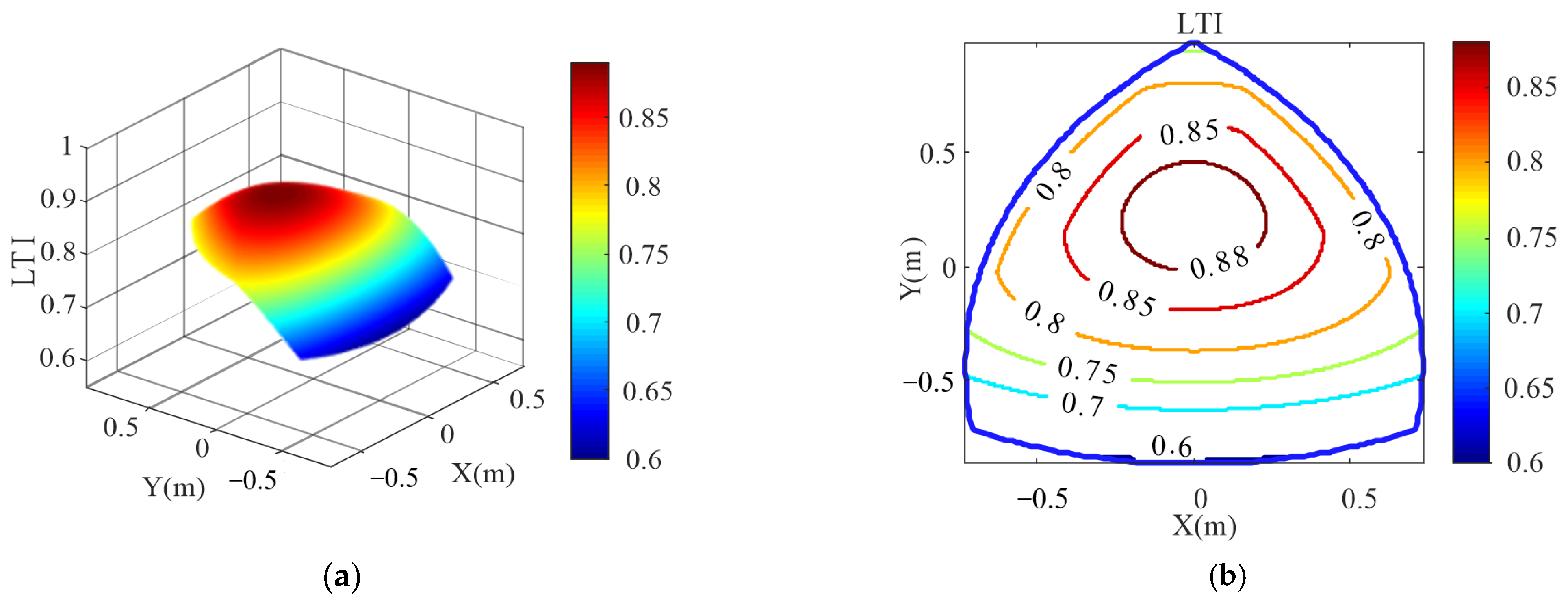
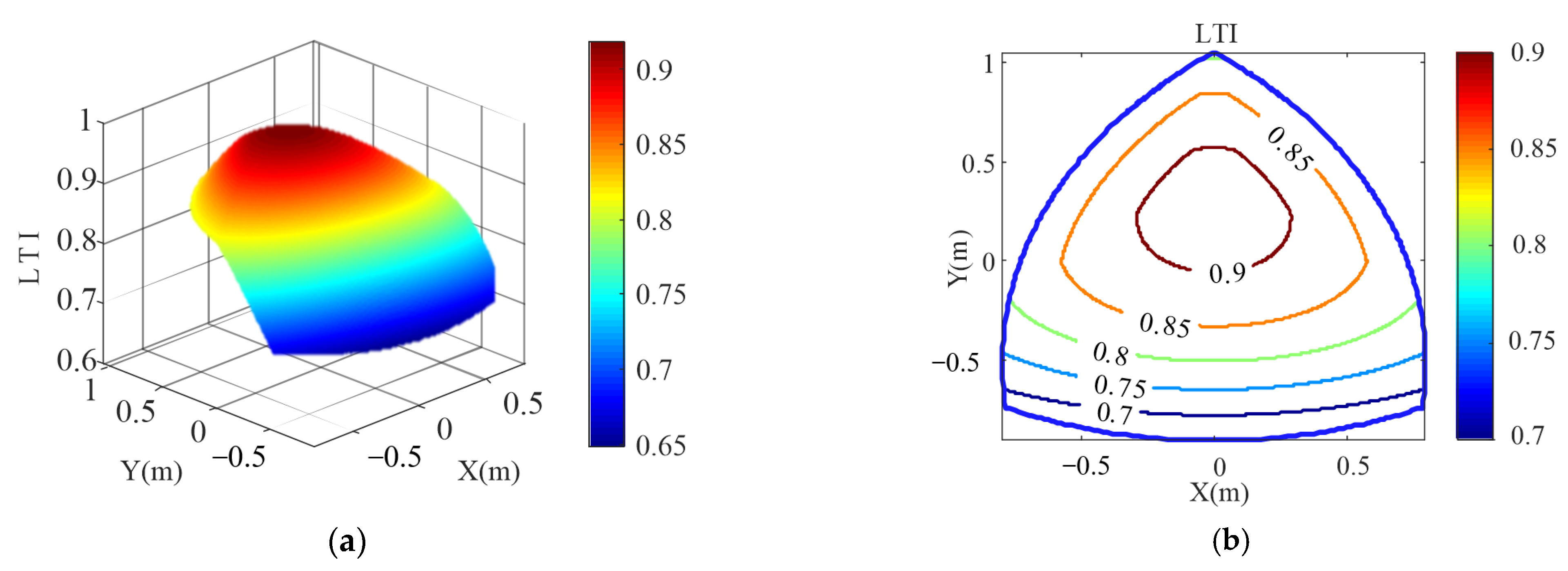
Assume that the dimension parameters of the 3UPU PMs are given as A1A3 = 2E, a1a3 = 2e, the heights on the bottom edge of B and m are given as E1 and e1. Then, E/E1 = e/e1 is satisfied. The range of the actuators is set as 0.7E ≤ li ≤ 1.35E (i = 1, 2, 3). The size parameters of the PMs are set as: E = 0.4 m, E1 = 0.8 m, e = 0.2 m, and e1 = 0.4 m. The distributions for the LTI in the plane of Z = 0.7 m and its two-dimensional contour atlas are shown in Figure 6a,b, respectively.
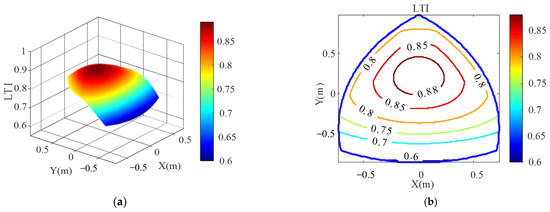
Figure 6.
LTI atlas of the 3-DOF translational 3-UPU PMs. (a) Three-dimensional performance atlas (Z = 1.05 m); (b) two-dimensional contour atlas.
3.2. Dimension Optimization Design Based on Motion/Force Transmission Index
In order to determine the dimension parameters of the 3-UPU PMs with good GTI and GTWV, a dimensional optimization design is performed. Since B and m are similar to each other, three are three of the four parameters (E, E1, e, and e1) need to be optimized.
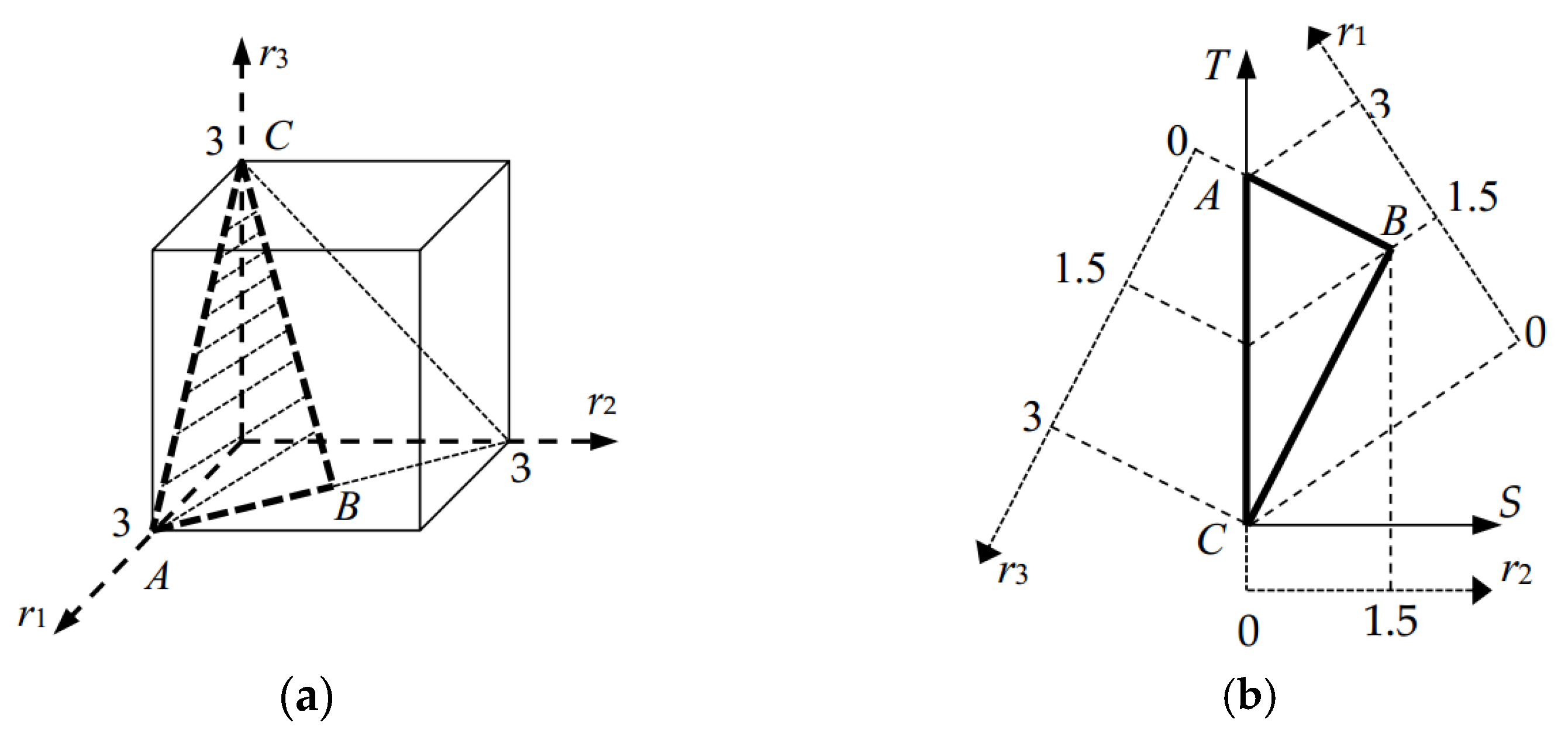
To realize dimensional dimensions, the parameter design space is used to turn the geometric parameters into non-dimensional quantities [17,18]. The dimension parameters are normalized as D = (E + e + E1)/3, r1 = E/D, r2 = e/D, r3 = E1/D, where D is a normalization factor. For the 3-UPU PMs, the conditions for the dimensionless quantities are 0 < r1, r2, r3 < 3, r2 ≤ r1. The parameter design space and its planar expression are shown in Figure 7a,b, respectively.
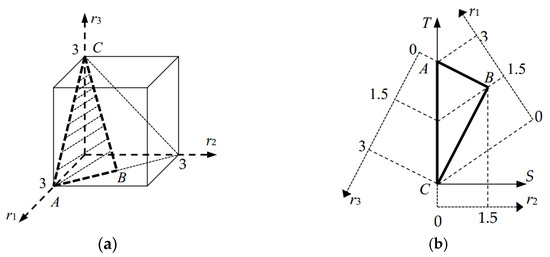
Figure 7.
Parameter space of the 3-DOF translational 3-UPU PMs. (a) Spatial expression; (b) planar expression.
The relationship among the normalized parameters can be expressed as:
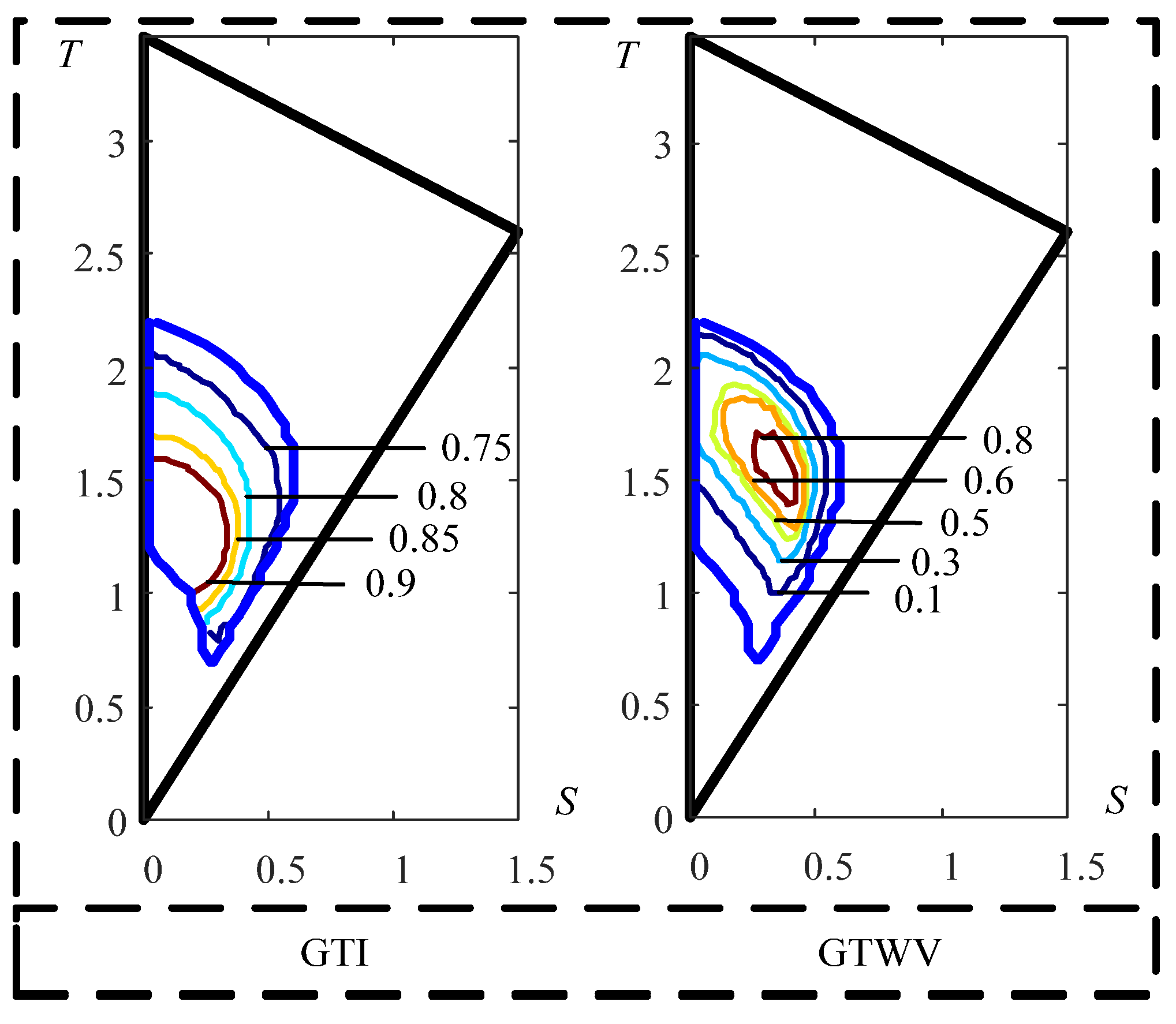
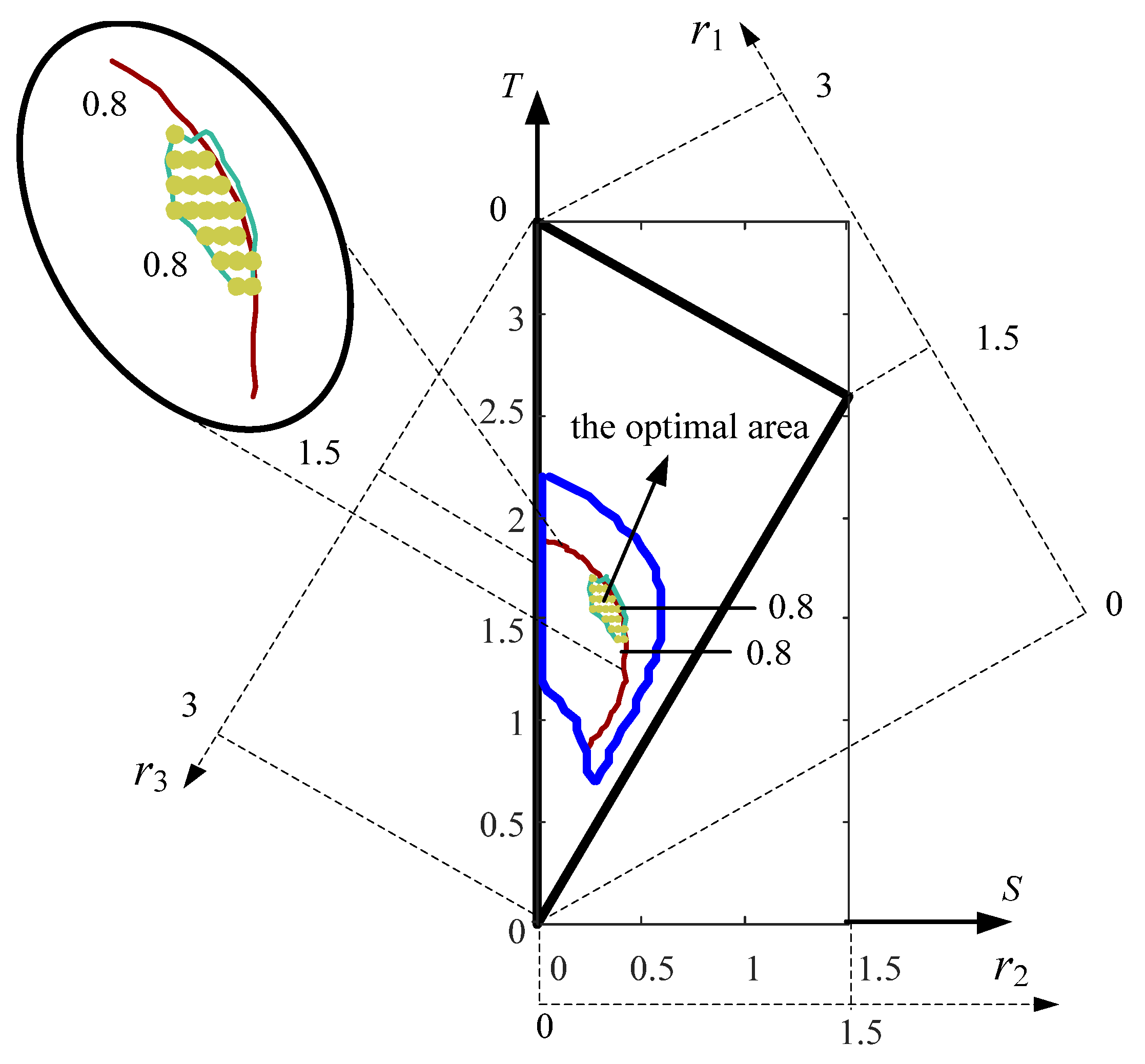
Based on the GTI and the GTWV, the design atlases of the optimization indices are obtained, as shown in Figure 8. In Figure 8, the GTI and GTWV exist in the region surrounded by the blue line, the GTI decreases with the increase in S and T, while GTWV achieves a great value in the middle region surrounded by the blue line, and the value decreases along the surrounding direction. To make the PMs have better transmission performance and good transmission workspace volume, the indices GTI and GTWV should be as large as possible. Therefore, by setting GTI ≥ 0.8 and GTWV ≥ 0.8, an optimum area as the shadow region revealed in Figure 9 can be obtained.
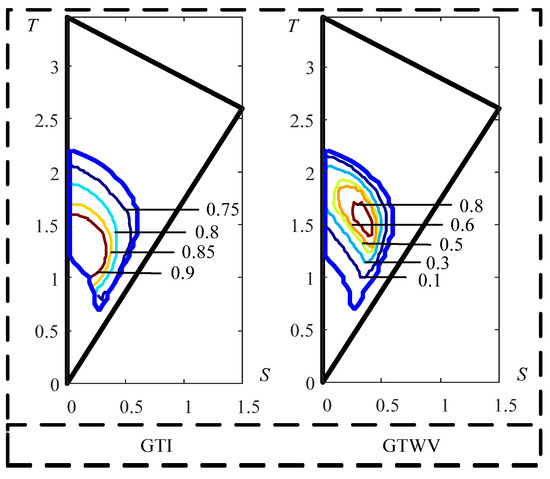
Figure 8.
The performance atlas of the 3-UPU translational PMs.
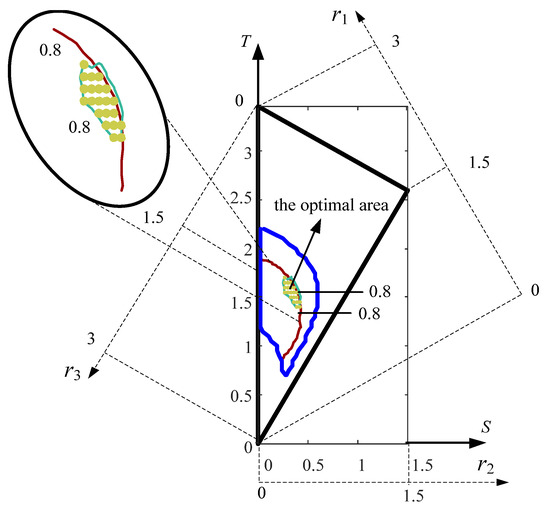
Figure 9.
Optimum area of the 3-UPU translational PMs.
After the optimal region was obtained, we selected a set of dimensionless parameters S = 0.36 and T = 1.5 from the optimal area, and D = 1.5 m was set, then the actual dimensions of the manipulators are e = 0.54 m, e1 = 0.734 m, E = 1.6786 m, and E1 = 2.2814 m. We set Z = 0.7, E = 1.175 m and drew the transmission atlas of the 3-UPU PMs with those optimized dimensions, as shown in Figure 10.
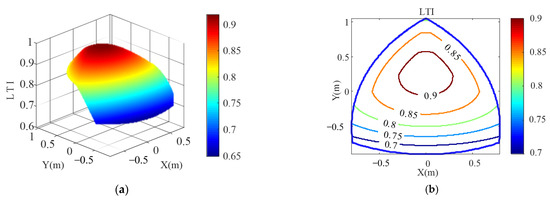
Figure 10.
Optimized LTI atlas of the 3-UPU translational PMs under Z = 1.175 m. (a) Three-dimensional performance atlas (Z = 1.175 m); (b) two-dimensional contour atlas (Z = 1.175 m).
Comparing Figure 6 with Figure 10, it is clear that the LTI of the 3-UPU PMs is better than that before optimization, and the area with LTI ≥ 0.85 in the atlas is significantly increased. The GTI and GTWV values before and after optimization were considerably improved compared with the previous ones, as shown in Table 1.

Table 1.
Performance indices values of the 3-DOF translational 3-UPU PMs before and after optimization.
4. Optimization of the Orientations of the Ending R Joints
In Section 3, the optimized dimensions of the 3-UPU translational PMs based on the identical motion/force transfer performance measured by GTI and GTWV are obtained. However, for the 3-UPU translational PMs with different orientations of the ending R joints, the constraint and stiffness performances are different. In order to find the orientations of the ending R joints having optimal constraint and stiffness performances, the multi-objective optimization is performed using the game theory algorithm in this section.
4.1. Constraint Performance Index
Let $Ci be the constraint wrench screw in the i-th limb. The virtual output twist screw ∆$Oi is the twist screw that exists at the moving platform after locking all actuators and releasing $Ci [24,27]. $Ci and ∆$Oi can be calculated using the following formula:
The output constraint index (OCI) of PMs is defined as
For the above 3-UPU TPMs, the manipulators have different outer R joint layouts, so the constraint screw $Ck is different, then the output constraint index OCI is different.
Similarly to GTW, the region of OCI ≥ 0.7 in the manipulator performance profile is defined as the good constraint workspace (GCW) and the global constraint index GCI of the manipulator within the GCW is defined as
where W denotes GCW.
4.2. Stiffness Performance Index
The stiffness model of Tsai 3-UPU translational PM considering active forces and constraint torques has been established in reference [13]. This stiffness model is also suitable for the proposed PMs in this paper. This model can be expressed as follows:
where K is the stiffness matrix, C and Cij are the compliance matrix and sub-compliance matrices of the PMs, respectively, F and T are the force and torque applied on the moving platform, respectively. δp and δψ are the corresponding linear deformation and angular deformation of the moving platform, respectively.
Let δpF and δψF be the linear deformation and the angular deformation, respectively, produced by an arbitrary unit force FI. Let δpT and δψT be the linear deformation and the angular deformation, respectively, produced by an arbitrary unit torque TI.
For the PMs, the smaller the maximum deformation is, the better the stiffness is 1 [34]. Thus, in this paper, the maximum of δpF, δψF, δpT, and δψT are used to evaluate the stiffness of the 3-UPU PMs [34], which can be calculated as follows:
where λPFmax, λψFmax, λPTmax, and λψTmax, are the maximum eigenvalues of C11, C21, C12, and C22, respectively.
The global linear stiffness index generated by F and T are expressed as
where V is the total workspace volume.
4.3. Multi-Objective Optimization of the 3-UPU PMs
This paper uses the game theory algorithm to perform multi-objective optimization on the performance of the PMs. The details of multi-objective optimization using the game theory algorithm are not introduced here due to space limitations. More details are available in [35,37].
We set θi (i = 1, 2) to be the angle between Ri1(Ri4) and the A1A3(a1a3) axis in B(m), which varies from 0 to π, θi = [θ1 θ2]. In order to achieve a high constraint index, the corresponding objective functions are defined as
To maximize the stiffness performance, four objective functions are set as
Mathematically, the multi-objective optimization problem of the 3-UPU translational PMs can be expressed as
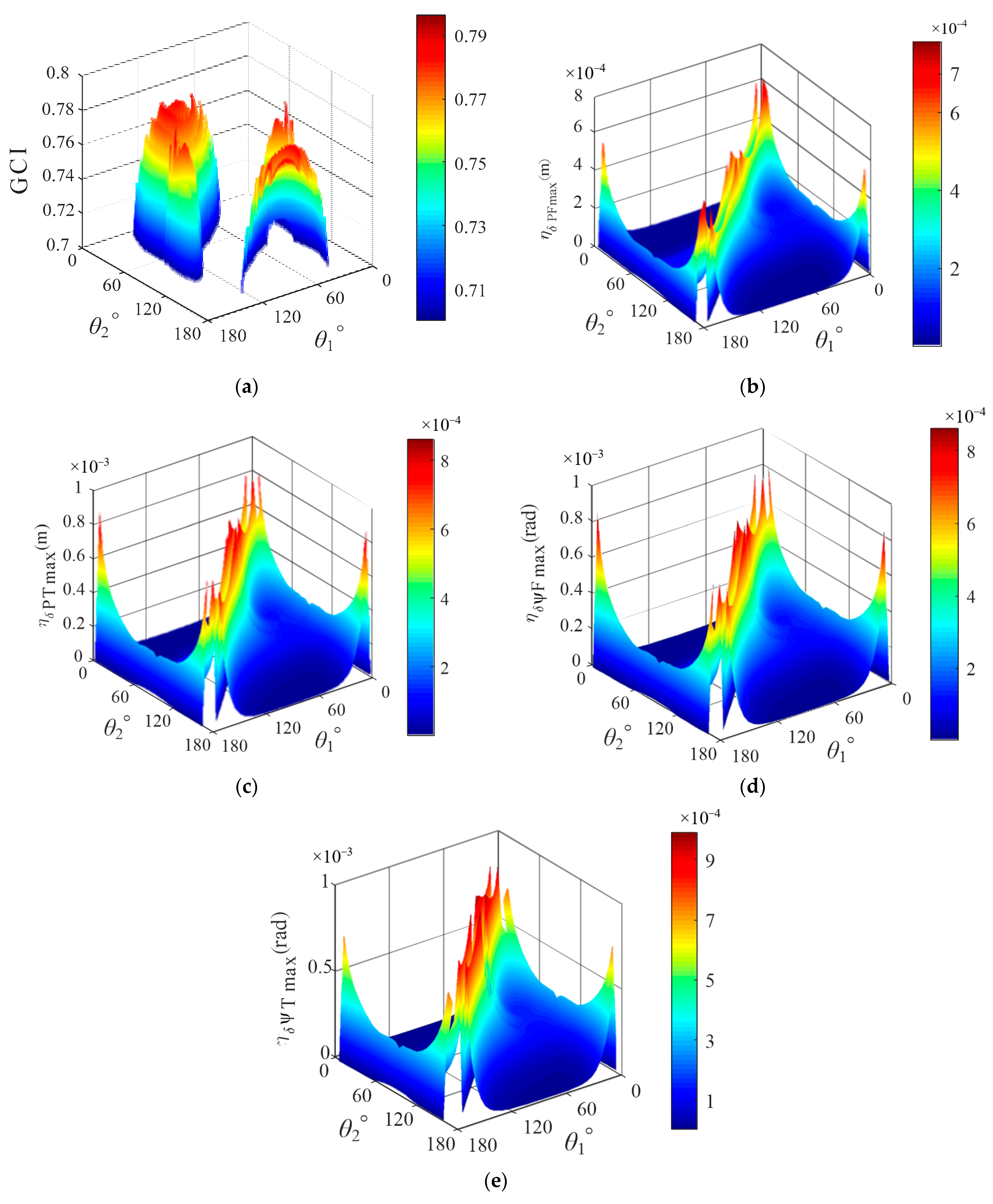
Combined with the constraints given by Equation (20), the distribution diagrams of the objective function are plotted in the complete parameter space, as shown in Figure 11.
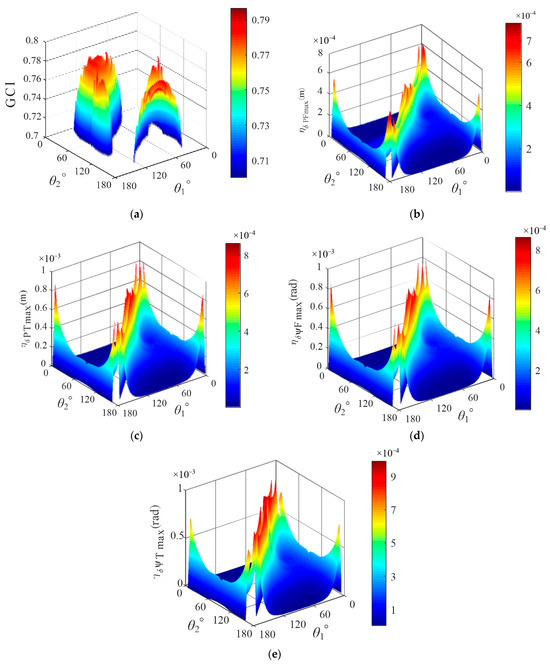
Figure 11.
Distribution of the objective functions: (a) GCI; (b) ηδPFmax; (c) ηδPTmax; (d) ηδψFmax; (e) ηδψTmax.
In multi-objective optimization using the game theory algorithm, the five objective functions are considered to have the same important status; thus, the weight factors of the five objective functions are all set as 1/5. Then, each objective is compromised simultaneously to obtain a balanced intersection subspace for all five. The step size of the angle variable parameter is set as 0.1°, namely, each objective is calculated for a total of 3,243,601 points in the complete objective parameter space.
After the objectives play multiple rounds according to their respective weights, the optimal balance point and the corresponding performance index values can be obtained as shown in Table 2.
Table 2.
The optimum parameter balance point and the corresponding performance index values.
The results show that when the angle between R11 and the A1A3 axis reaches 97.5°, and the angle between R21 and the a1a3 axis reaches 3.7°, the global constraint index is 0.7821 and the global linear translation and rotation stiffness index generated by F and T are 4.827 × 10−6, 7.566 × 10−6, 7.566 × 10−6, and 1.227 × 10−5. The game stops at this point and all five performance indices have been optimized. At the optimal balance point, the five objective functions reach a balance position, but none of the five reach their maximum.
5. Conclusions
The contribution of this article lies in the proposing of the orientations of the ending R joints in the 3-UPU PMs that can naturally realize three translational DOFs and the optimization of them. It is proven that the geometric condition for the 3-UPU PMs to realize the natural three-translational motion is that the ending R joints of any two limbs are parallel. Compared to traditional 3UPU parallel mechanisms, the configuration schemes can naturally realize three translational DOFs and thus can be used in packaging, pick-and-place, assembly, and material handling.
The proposed 3-UPU PMs have identical motion/force transmission performance. The GTI and GTWV of the 3-UPU PMs are calculated and the optimum area with good GTI and GTWV is derived. The proposed 3-UPU PMs have different constraint and stiffness performances. Based on the multi-objective optimization and using MOOGA, the optimal orientation of the ending R joints of the 3-UPU translational PMs is obtained. This study realizes the configuration optimization of the PMs considering transmission performance, constraint performance and stiffness performance.
Author Contributions
Conceptualization, B.H. and P.B.; methodology, B.H. and P.B.; validation, B.H. and P.B.; investigation, P.B.; resources, B.H.; writing—original draft preparation, B.H. and P.B.; writing—review and editing, B.H. and P.B.; visualization, P.B.; supervision, B.H. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the National Natural Science Foundation of China (No.52275033).
Data Availability Statement
Data are contained within the article.
Conflicts of Interest
The authors declare no conflicts of interest.
Abbreviations
The following abbreviations are used in this manuscript:
| PM | parallel manipulators |
| DOF | degree of freedom |
| MOOGA | multi-objective optimization game algorithm |
| GTW | good transmission workspace |
| GTWV | good transmission workspace volume |
| GTI | The global transmission index |
| OCI | output constraint index |
| GCW | good constraint workspace |
References
- Clavel, R. Delta, A fast robot with parallel geometry. In Proceedings of the International Symposium on Industrial Robots, Lausanne, Switzerland, 26–28 April 1988; pp. 91–100. [Google Scholar]
- Chung-Ching, L.; Hervé, J.M. Translational parallel manipulators with doubly planar limbs. Mech. Mach. Theory 2016, 42, 433–455. [Google Scholar]
- Shen, H.; Chablat, D.; Zeng, B.; Li, J.; Wu, G.; Yang, T. A Translational Three-Degrees-of-Freedom Parallel Mechanism with Partial Motion Decoupling and Analytic Direct Kinematics. J. Mech. Robot. 2020, 12, 021112. [Google Scholar] [CrossRef]
- Niu, Y.Z.; Song, J.W.; Li, F.J.; Li, S.H. Type synthesis method for three translational parallel mechanisms while considering velocity/force anisotropy. J. Mech. Sci. Technol. 2025, 39, 363–374. [Google Scholar] [CrossRef]
- Zhang, G.L.; Yang, G.L.; Deng, Y.M.; Chen, C.Y.; Fang, Z.J.; Li, J.J. Jerk-optimal force and motion synchronous planning for a 3-DOF translational force-controlled end-effector. Robot. Comput.-Integr. Manuf. 2025, 93, 102931. [Google Scholar] [CrossRef]
- Lin, S.T.; Huang, S.Y.; Lan, C.C.; Chidambaram, M.; Sivaramakrishnan, V. Design and experiment of a new translational parallel manipulator with large payload and high repeatability. Mech. Mach. Theory 2023, 180, 105124. [Google Scholar] [CrossRef]
- Tsai, L.W. Kinematics of three-dof platform with three extensible limbs. In Recent Advances in Robot Kinematics; Lenarcic, J., Parenti-Castelli, V., Eds.; Kluwer Academic Publishers: London, UK, 1996; pp. 401–410. [Google Scholar]
- Tsai, L.W.; Joshi, S. Kinematics and optimization of a spatial 3-UPU parallel manipulator. ASME J. Mech. Des. 2000, 122, 439–446. [Google Scholar] [CrossRef]
- Joshi, S.; Tsai, L.W. Jacobian analysis of limited-DOF parallel manipulators. ASME J. Mech. Des. 2002, 124, 254–258. [Google Scholar] [CrossRef]
- Gregorio, R.D.; Parenti-Castelli, V. Mobility analysis of the 3UPU parallel mechanism assembled for a pure translational motion. ASME J. Mech. Des. 2002, 124, 259–264. [Google Scholar] [CrossRef]
- Han, C.; Kim, J.; Kim, J.; Park, F.C. Kinematic Sensitivity Analysis of the 3-UPU Parallel Mechanism. Mech. Mach. Theory 2002, 37, 787–798. [Google Scholar] [CrossRef]
- Lu, Y.; Hu, B. Analysis of kinematics and solution of active/constrained forces of asymmetric 2UPU+X parallel manipulators. Proc IMechE Part C J. Mech. Eng. Sci. 2006, 220, 1819–1830. [Google Scholar] [CrossRef]
- Hu, B.; Yao, Y.; Wu, P. A Comparison Study of Two 3-UPU Translational Parallel Manipulators. Int. J. Adv. Rob. Syst. 2013, 10, 190. [Google Scholar] [CrossRef]
- Bhutani, G.; Dwarakanath, T.A. Novel design solution to high precision 3 axes translational parallel mechanism. Mech. Mach. Theory 2014, 75, 118–130. [Google Scholar] [CrossRef]
- Gan, D.; Dai, J.S.; Dias, J.; Seneviratne, L.D. Variable Motion/Force Transmissibility of a Metamorphic Parallel Mechanism with Reconfigurable 3T and 3R Motion. ASME J. Mech. Rob. 2016, 8, 051001. [Google Scholar] [CrossRef]
- Kong, X. Classification of 3-DOF 3-UPU Translational Parallel Mechanisms Based on Constraint Singularity Loci Using Gröbner Cover. ASME J. Mech. Rob. 2022, 14, 041010. [Google Scholar] [CrossRef]
- Hassani, A.; Khalilpour, S.A.; Bataleblu, A.; Taghirad, H.D. Full dynamic model of 3-UPU translational parallel manipulator for model-based control schemes. Robotica 2022, 40, 2815–2830. [Google Scholar] [CrossRef]
- Tsai, C.Y.; Yu, C.P.; Yeh, P.C.; Lan, C.C. Parametric joint compliance analysis of a 3-UPU parallel robot. Mech. Mach. Theory 2022, 170, 104–721. [Google Scholar] [CrossRef]
- Zhao, J.S.; Wei, S.T.; Sun, H.L. Kinematics and Statics of a 3-UPU Robot in Screw Coordinates. J. Mech. Robot. 2023, 15, 061004. [Google Scholar] [CrossRef]
- Xu, Y.Y.; Zhao, X.W.; Li, G.J.; Tang, X.L. Design and analysis of 3-UPU wave compensation platform based on improved sliding mode control. Ships Offshore Struct. 2024, 19, 2040–2049. [Google Scholar] [CrossRef]
- Wang, J.S.; Wu, C.; Liu, X.J. Performance evaluation of parallel manipulators: Motion/force transmissibility and its index. Mech. Mach. Theory 2010, 45, 1462–1476. [Google Scholar] [CrossRef]
- Wu, C.; Liu, X.J.; Wang, L.P.; Wang, J.S. Optimal design of spherical 5R parallel manipulators considering the motion/force transmissibility. J. Mech. Design. 2010, 132, 031002. [Google Scholar] [CrossRef]
- Meng, Q.Z.; Xie, F.G.; Liu, X.J.; Takeda, Y. An evaluation approach for motion-force interaction performance of parallel manipulators with closed-loop passive limbs. Mech. Mach. Theory 2020, 149, 103844. [Google Scholar] [CrossRef]
- Liu, X.J.; Chen, X.; Nahon, M. Motion/force constrainability analysis of lower-mobility parallel manipulators. ASME J. Mech. Rob. 2014, 6, 031006. [Google Scholar] [CrossRef]
- Marlow, K.; Isaksson, M.; Dai, J.S.; Nahavandi, S. Motion/force transmission analysis of planar parallel mechanisms with closed-loop subchains. ASME J. Mech. Rob. 2016, 138, 062302. [Google Scholar] [CrossRef]
- Hu, B.; Shi, D.S.; Xie, T.F.; Hu, B.B.; Ne, N.J. Kinematically identical manipulators derivation for the 2-RPU+UPR parallel manipulator and their constraint performance comparison. ASME J. Mech. Rob. 2020, 12, 061011. [Google Scholar] [CrossRef]
- Song, J.K.; Zhao, C.; Zhao, K.; Yan, W.J.; Chen, Z.M. Singularity analysis and dimensional synthesis of a 2R1T 3-UPU parallel mechanism based on performance atlas. ASME J. Mech. Rob. 2023, 15, 011001. [Google Scholar] [CrossRef]
- Huang, S.; Schimmels, J.M. The eigenscrew decomposition of spatial stiffness matrix. IEEE Trans. Rob. Autom. 2000, 16, 146–156. [Google Scholar] [CrossRef]
- Raoofian, A.; Taghvaeipour, A.; Kamali, A. On the stiffness analysis of robotic manipulators and calculation of stiffness indices. Mech. Mach. Theory 2018, 130, 382–402. [Google Scholar] [CrossRef]
- Portman, V.T. Robot stiffness evaluability problem: Solution by Schur complements and collinear stiffness values. Mech. Mach. Theory 2021, 161, 104297. [Google Scholar] [CrossRef]
- Wu, G.L.; Zou, P. Stiffness analysis and comparison of a Biglide parallel grinder with alternative spatial modular parallelograms. Robotica 2017, 35, 1310–1326. [Google Scholar] [CrossRef]
- Yan, S.J.; Ong, S.K.; Nee, A.Y.C. Stiffness analysis of parallelogram-type parallel manipulators using a strain energy method. Robot. Comput. Integr. Manuf. 2016, 37, 13–22. [Google Scholar] [CrossRef]
- Zhang, D.; Gao, Z. Forward kinematics, performance analysis, and multi-objective optimization of a bio-inspired parallel manipulator. Robot. Comput. Integr. Manuf. 2012, 28, 484–492. [Google Scholar] [CrossRef]
- Wu, G.; Bai, S.; Hjornet, P. Architecture optimization of a parallel Schönflies-motion robot for pick-and-place applications in a predefined workspace. Mech. Mach. Theory 2016, 106, 148–165. [Google Scholar] [CrossRef]
- Yang, C.; Li, Q.C.; Chen, Q.H. Multi-objective optimization of parallel manipulators using a game algorithm. Appl. Math. Model. 2019, 74, 217–243. [Google Scholar] [CrossRef]
- Huang, Z.; Kong, L.F.; Fang, Y.F. Theory on Parallel Robotics and Control; Machinery Industry Press: Beijing, China, 1997. [Google Scholar]
- Oskar, M.; John, V.N. Theory of Games and Economic Behavior; Princeton University Press: Princeton, NJ, USA, 1953. [Google Scholar]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).