
Event-Driven Prescribed-Time Tracking Control for Multiple UAVs with Flight State Constraints



Abstract
1. Introduction
- By proposing a novel prescribed-time command-filtered backstepping, the “explosion of complexity” problem is effectively addressing while ensuring prescribed-time stability and a fast response.
- In contrast to the works [18,33,34,35] that utilize barrier Lyapunov functions to tackle state-constrained problems, this paper addresses the issue of asymmetric time-varying state constraints by employing a state-transition function. This approach effectively eliminates the need for feasibility conditions on the virtual controller.
2. Preliminaries and Problem Formulation
2.1. Notations
2.2. UAV Dynamics Model
2.2.1. Velocity Subsystem
2.2.2. Attitude Subsystem
2.3. State Transition
2.4. Control Objective
3. Prescribed-Time Control Design
3.1. Error Transformations Based on State Transition
3.1.1. Velocity Subsystem
3.1.2. Attitude Subsystem
3.2. Control Design
3.2.1. Velocity Subsystem
3.2.2. Attitude Subsystem
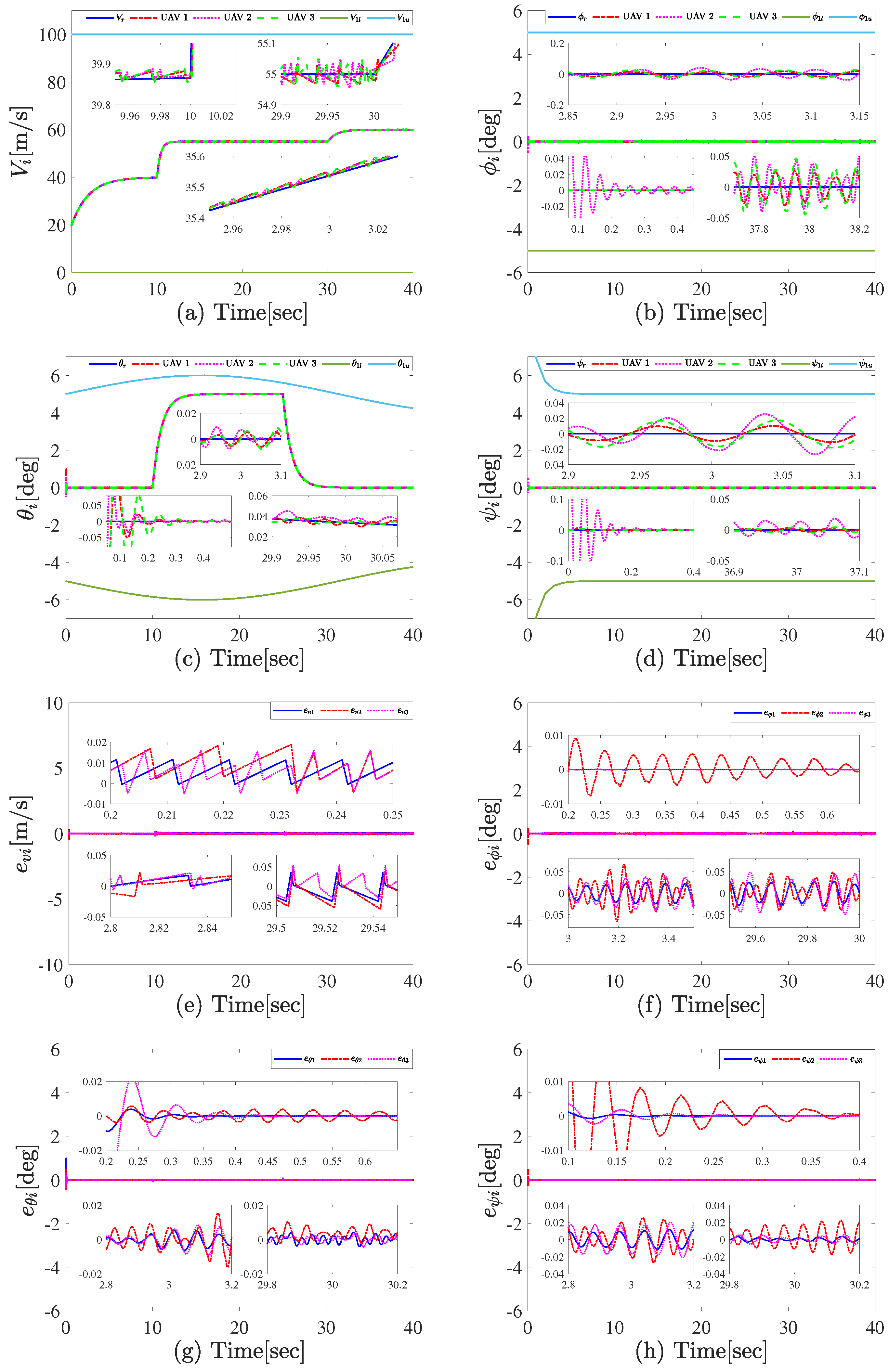
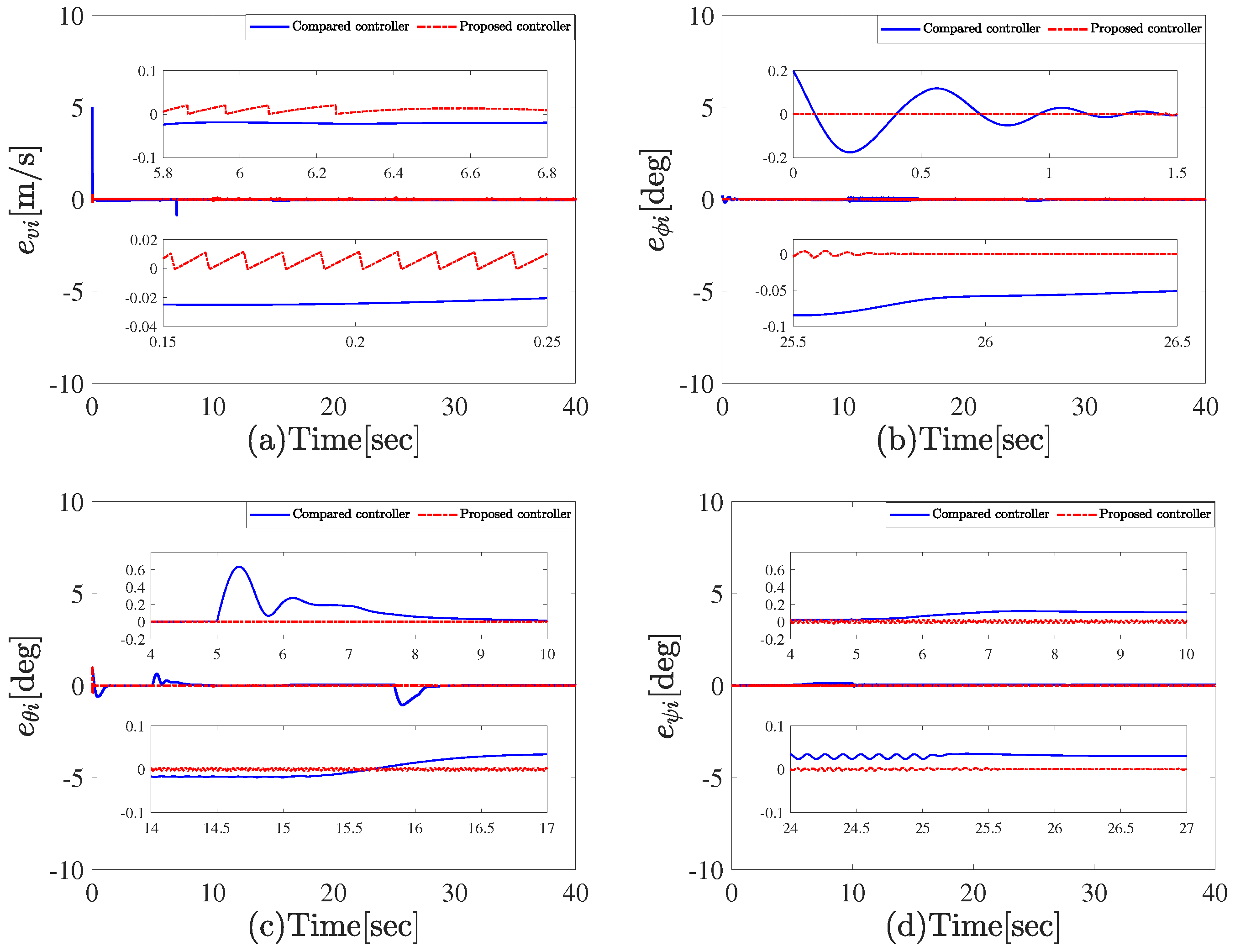
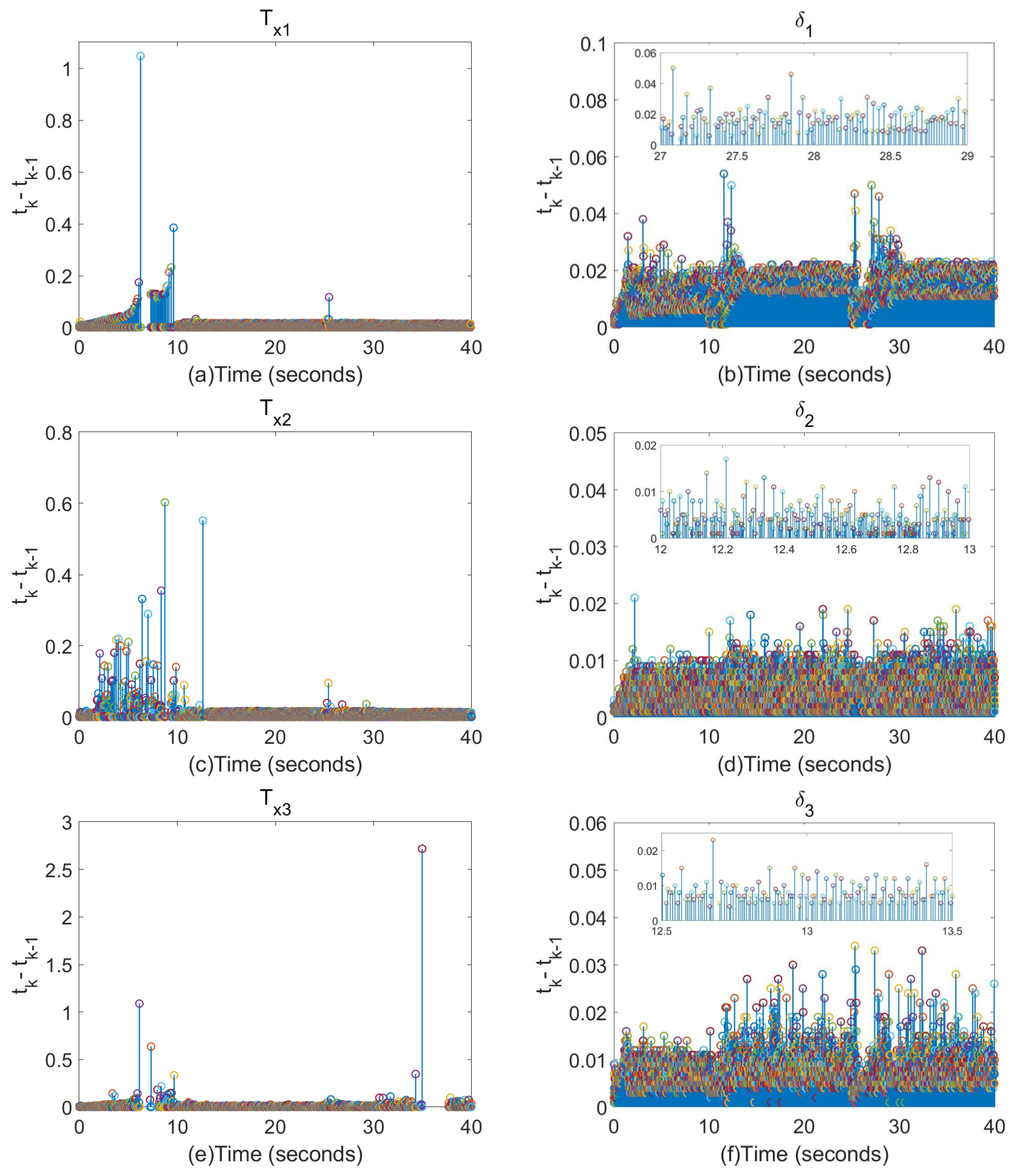
4. Simulation Results and Analysis
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Doukhi, O.; Lee, D.J. Neural network-based robust adaptive certainty equivalent controller for quadrotor UAV with unknown disturbances. Int. J. Control Autom. Syst. 2019, 17, 2365–2374. [Google Scholar] [CrossRef]
- Guerrero-Sánchez, M.E.; Hernández-González, O. Dynamics and control of UAVs. Machines 2024, 12, 749. [Google Scholar] [CrossRef]
- Liu, H.; Meng, Q.; Peng, F.; Lewis, F.L. Heterogeneous formation control of multiple UAVs with limited-input leader via reinforcement learning. Neurocomputing 2020, 412, 63–71. [Google Scholar] [CrossRef]
- Xiao, J.; Yuan, G.; Xue, Y.; He, J.; Wang, Y.; Zou, Y.; Wang, Z. A deep reinforcement learning based distributed multi-UAV dynamic area coverage algorithm for complex environment. Neurocomputing 2024, 595, 127904. [Google Scholar] [CrossRef]
- Ahmed, Z.; Xiong, X. Adaptive impedance control of multirotor UAV for accurate and robust path following. Machines 2024, 12, 868. [Google Scholar] [CrossRef]
- Lv, M.; Wang, N. Distributed control for uncertain multi-agent systems with the powers of positive-odd mumbers: A low-complexity design approach. IEEE Trans. Autom. Control 2023, 69, 434–441. [Google Scholar] [CrossRef]
- Shi, Y.; Li, J.; Lv, M.; Wang, N.; Zhang, B. Distributed consensus control for 6-DOF fixed-wing multi-UAVs in asynchronously switching topologies. IEEE Trans. Veh. Technol. 2024, 1–15. [Google Scholar] [CrossRef]
- Jackson, B.; Howell, T.; Shaha, K.; Schwager, M.; Manchester, Z. Scalable cooperative transport of cable-suspended loads with UAVs using distributed trajectory optimization. IEEE Robot. Autom. Lett. 2020, 5, 3368–3374. [Google Scholar] [CrossRef]
- He, H.; Yuan, W.; Chen, S.; Jiang, X.; Yang, F.; Yang, J. Deep reinforcement learning-based distributed 3D UAV trajectory design. IEEE Trans. Commun. 2024, 72, 3736–3751. [Google Scholar] [CrossRef]
- Fu, C.; Tian, Y.; Huang, H.; Zhang, L.; Peng, C. Finite-time trajectory tracking control for a 12-rotor unmanned aerial vehicle with input saturation. Isa Trans. 2018, 81, 52–62. [Google Scholar] [CrossRef]
- Wang, D.; Zong, Q.; Tian, B.; Lu, H.; Wang, J. Adaptive finite-time reconfiguration control of unmanned aerial vehicles with a moving leader. Nonlinear Dyn. 2018, 95, 1099–1116. [Google Scholar] [CrossRef]
- Sun, P.; Zhu, B.; Zou, Z.; Basin, M. Vision-based finite-time uncooperative target tracking for UAV subject to actuator saturation. Automatica 2021, 130, 109708. [Google Scholar] [CrossRef]
- Huang, D.; Huang, T.; Qin, N.; Li, Y.; Yang, Y. Finite-time control for a UAV system based on finite-time disturbance observer. Aerosp. Sci. Technol. 2022, 129, 107825. [Google Scholar] [CrossRef]
- Lin, G.; Li, H.; Ahn, C.; Yao, D. Event-Based finite-time neural control for human-in-the-loop UAV attitude systems. IEEE Trans. Neural Networks Learn. Syst. 2023, 34, 10387–10397. [Google Scholar] [CrossRef]
- Zhou, S.; Guo, K.; Yu, X.; Guo, L.; Xie, L. Fixed-Time observer based safety control for a quadrotor UAV. IEEE Trans. Aerosp. Electron. Syst. 2021, 57, 2815–2825. [Google Scholar] [CrossRef]
- Tao, M.; Chen, Q.; He, X.; Xie, S. Fixed-time filtered adaptive parameter estimation and attitude control for quadrotor UAVs. IEEE Trans. Aerosp. Electron. Syst. 2022, 58, 4135–4146. [Google Scholar] [CrossRef]
- Lv, M.; Ahn, C.; Zhang, B.; Fu, A. Fixed-Time antisaturation cooperative control for networked fixed-wing unmanned aerial vehicles considering actuator failures. IEEE Trans. Aerosp. Electron. Syst. 2023, 59, 8812–8825. [Google Scholar] [CrossRef]
- Zhou, Y.; Dong, W.; Liu, Z.; Lv, M.; Zhang, W.; Chen, Y. IBLF-based fixed-time fault-tolerant control for fixed-wing UAV with guar-anteed time-varying state constraints. IEEE Trans. Veh. Technol. 2023, 72, 4252–4266. [Google Scholar] [CrossRef]
- Zhao, S.; Zheng, J.; Yi, F.; Wang, X.; Zuo, Z. Exponential predefined time trajectory tracking control for fixed-wing UAV with input saturation. IEEE Trans. Aerosp. Electron. Syst. 2024, 60, 6406–6419. [Google Scholar] [CrossRef]
- Sun, F.; Zhang, J. Event-triggered prescribed-time tracking control for nonlinear systems with asynchronous switching. IEEE Trans. Circuits Syst. 2023, 70, 4159–4168. [Google Scholar]
- Dong, T.; Chai, R.; Yao, F.; Tsourdos, A.; Chai, S.; Garcia, M. Terminal sliding mode attitude tracking control for unmanned vehicle with predefined-time stability. Aerosp. Sci. Technol. 2023, 142, 108669. [Google Scholar] [CrossRef]
- Benaddy, A.; Labbadi, M.; Boubaker, S.; Alsubaei, F.; Bouzi, M. Predefined-time fractional-order tracking control for UAVs with pertur-bation. Mathematics 2023, 11, 4886. [Google Scholar] [CrossRef]
- Li, Q.; Chen, Y.; Liang, K. Predefined-time formation control of the quadrotor-UAV cluster’ position system. Appl. Math. Model. 2023, 116, 45–64. [Google Scholar] [CrossRef]
- Sun, P.; Zhu, B.; Li, S. Vision-based prescribed performance control for UAV target tracking subject to actuator saturation. IEEE Trans. Intell. Veh. 2024, 9, 2382–2389. [Google Scholar] [CrossRef]
- Yang, S.; Pan, Y.; Cao, L.; Chen, L. Predefined-time fault-tolerant consensus tracking control for multi-UAV systems with prescribed per-formance and attitude constraints. IEEE Trans. Aerosp. Electron. Syst. 2024, 60, 4058–4072. [Google Scholar] [CrossRef]
- Wang, F.; Gao, H.; Wang, K.; Zhou, C.; Zong, Q.; Hua, C. Disturbance observer-based finite-time control design for a quadrotor UAV with external disturbance. IEEE Trans. Aerosp. Electron. Syst. 2021, 57, 834–847. [Google Scholar] [CrossRef]
- Mofid, O.; Mobayen, S. Adaptive finite-time backstepping global sliding mode tracker of quad-rotor UAVs under model uncertainty, wind Perturbation, and input Saturation. IEEE Trans. Aerosp. Electron. Syst. 2022, 58, 140–151. [Google Scholar] [CrossRef]
- Han, Q.; Liu, Z.; Su, H.; Liu, X. Filter-based disturbance observer and adaptive control for euler–lagrange systems with application to a quadrotor UAV. IEEE Trans. Ind. Electron. 2023, 70, 8437–8445. [Google Scholar] [CrossRef]
- Wang, H.; Li, M.; Zhang, H.; Liu, S. Predefined-Time Composite Adaptive Fuzzy Nonsingular Attitude Control for Multi-UAVs. IEEE Trans. Fuzzy Syst. 2024, 32, 6891–6903. [Google Scholar] [CrossRef]
- Bemporad, A. Reference governor for constrained nonlinear systems. IEEE Trans. Autom. Control 1998, 43, 415–419. [Google Scholar] [CrossRef]
- Dehaan, D.; Guay, M. Extremum-seeking control of statecon-strained nonlinear systems. IFAC Proc. Vol. 2004, 37, 663–668. [Google Scholar] [CrossRef]
- He, W.; Yin, Z.; Sun, C. Adaptive neural network control of a marine vessel with constraints using the asymmetric barrier Lyapunov function. Math. Probl. Eng. 2016, 47, 1641–1651. [Google Scholar] [CrossRef] [PubMed]
- Chang, X.; Wang, K.; Chen, K.; Fu, W. Full-state-constrained adaptive control for a class of UAVs suffering from coupled uncertainties using the HOBLF. Automatica 2021, 2021, 9963426. [Google Scholar] [CrossRef]
- Ma, R.; Fu, L.; Fu, J. Prescribed-time tracking control for nonlinear systems with guaranteed performance. Automatica 2022, 146, 110573. [Google Scholar] [CrossRef]
- Cao, Y.; Song, Y.; Wen, C. Practical tracking control of perturbed uncertain nonaffine systems with full state constraints. Automatica 2019, 110, 108608. [Google Scholar] [CrossRef]
- Kazemy, A.; Lam, J.; Zhang, X. Event-triggered output feedback synchronization of master–slave neural networks under deception attacks. IEEE Trans. Neural Networks Learn. Syst. 2022, 33, 952–961. [Google Scholar] [CrossRef] [PubMed]
- Zhang, X.; Han, Q.; Zhang, B.; Ge, X.; Zhang, D. Accumulated-state-error-based event-triggered sampling scheme and its application to H∞ control of sampled-data systems. Sci. China 2024, 67, 162206. [Google Scholar] [CrossRef]
- Tian, B.; Cui, J.; Lu, H.; Liu, L.; Zong, Q. Attitude control of UAVs based on event-triggered supertwisting algorithm. IEEE Trans. Ind. Inf. 2021, 17, 1029–1038. [Google Scholar] [CrossRef]
- Wang, J.; Bi, C.; Wang, D.; Kuang, Q.; Wang, C. Finite-time distributed event-triggered formation control for quadrotor UAVs with experimentation. ISA Trans. 2022, 126, 585–596. [Google Scholar] [CrossRef]
- Wang, H.; Shan, J. Fully distributed event-triggered formation control for multiple quadrotors. IEEE Trans. Ind. Electron. 2023, 70, 12566–12575. [Google Scholar] [CrossRef]
- Ma, C.; Zheng, S.; Xu, T.; Ji, Y. Finite-time asynchronous event-triggered formation of UAVs with semi-markov-type topologies. Sensors 2022, 22, 4529. [Google Scholar] [CrossRef] [PubMed]
- Wang, F.; He, S.; Zhou, C.; Gao, Y.; Zong, Q. Distributed practical finite-time formation control of quadrotor UAVs based on finite-time event-triggered disturbance observer. IEEE Syst. J. 2023, 18, 355–366. [Google Scholar] [CrossRef]
- Zhang, B.; Sun, X.; Liu, S.; Lv, M.; Deng, X. Event-triggered adaptive fault-tolerant synchronization tracking control for multiple 6-DOF fixed-Wing UAVs. IEEE Trans. Veh. Technol. 2022, 71, 148–161. [Google Scholar] [CrossRef]
- Castaneda, H.; Salas-Pena, O.S.; Leon-Morales, J. Extended observer based on adaptive second order sliding mode control for a fixed wing UAV. ISA. Trans. 2017, 66, 226–232. [Google Scholar] [CrossRef]
- Wu, C.; Yan, J.; Shen, J.; Wu, X.; Xiao, B. Predefined-time attitude stabilization of receiver aircraft in aerial refueling. IEEE Trans. Circ. Syst.-II Express Briefs 2021, 68, 3321–3325. [Google Scholar] [CrossRef]
- Zhou, Z.; Tie, L. A new class of finite-time nonlinear consensus protocols for multi-agent systems. Int. J. Control 2014, 87, 363–370. [Google Scholar]
- Wang, H.; Zhu, Q. Adaptive output feedback control of stochastic nonholonomic systems with nonlinear parameterization. Automatica 2018, 98, 247–255. [Google Scholar] [CrossRef]
- Sun, J.; Yi, J.; Pu, Z. Fixed-time adaptive fuzzy control for uncertain nonstrict-feedback systems with time-varying onstraints and input saturations. IEEE Trans. Fuzzy Syst. 2011, 30, 1114–1128. [Google Scholar] [CrossRef]
- Wang, C.; Lin, Y. Decentralized adaptive tracking control for a class of interconnected nonlinear time-varying systems. Automatica 2015, 54, 16–24. [Google Scholar] [CrossRef]
- Yang, H.; Ye, D. Adaptive fixed-time bipartite tracking consensus control for unknown nonlinear multi-agent systems: An information classification mechanism. Inf. Sci. 2018, 459, 238–254. [Google Scholar] [CrossRef]
- Zhou, N.; Kawano, Y.; Cao, M. Neural network-based adaptive control for spacecraft under actuator failures and input saturations. IEEE Trans. Neural Netw. Learn. Syst. 2020, 31, 3696–3710. [Google Scholar] [CrossRef] [PubMed]
- Zhang, B.; Sun, X.; Lv, M.; Liu, S.; Li, L. Distributed adaptive fixed-time fault-tolerant control for multiple 6-dof uavs with full-state constraints guarantee. IEEE Syst. J. 2022, 16, 4792–4803. [Google Scholar] [CrossRef]
- Sun, W.; Su, S.; Wu, Y.; Xia, J. Adaptive fuzzy event-triggered control for high-order nonlinear systems with prescribed performance. IEEE Trans. Cybern. 2022, 52, 2885–2895. [Google Scholar] [CrossRef]
- Guo, K.; Jia, J.; Yu, X.; Guo, L.; Xie, L. Multiple observers based anti-disturbance control for a quadrotor UAV against payload and wind disturbances. Control Eng. Pract. 2020, 102, 104560. [Google Scholar] [CrossRef]
- Chen, S.; Hu, F.; Chen, Z.; Wu, H. Correction method for UAV pose estimation with dynamic compensation and noise reduction using multi-sensor fusion. IEEE Trans. Consum. Electron. 2024, 70, 980–989. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Coefficient | Value | Unit | Coefficient | Value | Unit |
|---|---|---|---|---|---|
| 20.64 | kg | −0.213 | |||
| 1.96 | m | −3.449 | |||
| 0.76 | −0.151 | ||||
| 1.37 | 0.114 | ||||
| g | 9.8 | −0.195 | |||
| 1.29 | −0.056 | ||||
| 1.607 | −0.036 | ||||
| 7.51 | 0.25 | ||||
| 7.18 | −0.1 | ||||
| 0.59 | −0.038 | ||||
| 0.1 | / | 0.014 | |||
| 0.5 | / | −0.473 | |||
| −0.001 | / | −0.364 | |||
| 0.022 | / | 0.036 | |||
| 0.022 | / | −0.055 |
| UAV1 | UAV2 | UAV3 | |
|---|---|---|---|
| x (m) | −20 | 10 | 30 |
| y (m) | −10 | 10 | −10 |
| z (m) | 100 | 100 | 100 |
| V (m/s) | 20 | 19.5 | 20 |
| () | 0 | −0.5 | 0 |
| () | 1 | 0.5 | 0 |
| () | 0 | 0.5 | 0 |
| l (rad/s) | 0 | 0 | 0 |
| q (rad/s) | 0 | 0 | 0 |
| j (rad/s) | 0 | 0 | 0 |
| Control Schemes | ||
|---|---|---|
| Compared controller 1 | 40,000 | 40,000 |
| Compared controller 2 | 21,059 | 6222 |
| Proposed controller | 5698 | 3231 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Han, X.; Yu, P.; Lv, M.; Shi, Y.; Wang, N. Event-Driven Prescribed-Time Tracking Control for Multiple UAVs with Flight State Constraints. Machines 2025, 13, 192. https://doi.org/10.3390/machines13030192
Han X, Yu P, Lv M, Shi Y, Wang N. Event-Driven Prescribed-Time Tracking Control for Multiple UAVs with Flight State Constraints. Machines. 2025; 13(3):192. https://doi.org/10.3390/machines13030192
Chicago/Turabian StyleHan, Xueyan, Peng Yu, Maolong Lv, Yuyuan Shi, and Ning Wang. 2025. "Event-Driven Prescribed-Time Tracking Control for Multiple UAVs with Flight State Constraints" Machines 13, no. 3: 192. https://doi.org/10.3390/machines13030192
APA StyleHan, X., Yu, P., Lv, M., Shi, Y., & Wang, N. (2025). Event-Driven Prescribed-Time Tracking Control for Multiple UAVs with Flight State Constraints. Machines, 13(3), 192. https://doi.org/10.3390/machines13030192