1. Introduction
Robotic arms are usually programmable mechanical arms with similar functions to human’s [
1,
2,
3,
4,
5]. They can execute repetitive tasks in place of a human with fast response, high reliability and accuracy, increasing working efficiency and productivity as well as keeping workers from hazardous situations to avoid potential injuries. Usually, robotic arms are widely used in industrial production lines to complete tasks such as device assembly, material handling, pick and place, welding and sorting, all of which require a high standard of positioning precision to guarantee manufacturing accuracy. However, overshoot and oscillations are always generated when a robotic arm is instructed to move to a desired position, which adversely influences its positioning accuracy and efficiency. In addition, robotic arms may also suffer external disturbances such as unexpected forces or torques. These external disturbances can result in reduced accuracy and stability or lead to safety hazards such as collisions with nearby objects or individuals. Therefore, effective solutions have to be explored to mostly minimize the overshoot, avoid the oscillations, and strengthen the anti-disturbance capability to the largest extent.
The core component of a robotic arm that influences the positioning and anti-disturbance performance is the actuation system, which consists of the motor and the gearbox. The motor outputs actuation torque, while the gearbox is responsible for amplifying the torque, making it possible to obtain a large output using a small motor. Precise motor control is pivotal for the robotic arm to execute required tasks successfully. In this regard, numerous methods have been put forward to address this challenge. Cio [
6] combined stereovision and eye-tracking to control an assistive robotic arm, especially in scenarios where obstacles are present. Kareemullah [
7] employed the Internet of Things to enable remote control of robotic arms, reducing human exposure to hazardous environments. Jeong [
8] developed a brain-controlled robotic arm system using deep learning and electroencephalogram signals. Comprehensive reviews on the robotic arm control can be found in [
9,
10]. In terms of the specific purpose for improving the positioning performance of the robotic arm, considerable effort has been devoted by many research groups, where developing advanced control algorithms to control motors is one of the most common methods. For instance, Malki et al. [
11] designed a Fuzzy PID control for a flexible-joint robotic arm considering the time-varying loads. The variable gains in the controller enable the arm to perform a faster response with smaller overshoots than its conventional counterpart. Nguyen et al. [
12] designed an adaptive sliding controller in which a PID controller works as a compensator to manipulate a robotic arm. Other control algorithms, such as nonlinear model predictive control schemes and neural network algorithms, have also been proven to be effective in improving the positioning performance as well as tracking the performance of robotic arms by controlling motors [
13,
14,
15,
16,
17].
Nevertheless, for those robotic arms equipped with only motors and gearboxes, the positioning performance is severely limited by the maximum torque that the motors can achieve, even if under effective control algorithms. This maximum torque has a big impact on positioning accuracy as its effect is to pull the arm to the target position when overshoots occur. Therefore, for those situations where the robotic arm is heavily loaded or the maximum torque is relatively small compared to the load, the robotic arm will perform terribly in positioning, resulting in large overshoots and long settling times. Hence, integrating additional devices that can add extra torque into the robotic arm system has been put forward. One typical device is the MR damper, a kind of smart device containing MR Fluids (MRF) [
18,
19,
20]. By regulating the applied magnetic field, the damping of MR dampers can be controlled rapidly and reversibly with low energy consumption [
21,
22,
23]. As the damping torque provided by MR dampers is in the reverse direction of the movement, it will provide extra torque to pull the arm towards the target position, thereby reducing the overshoot and shortening the oscillation time. For example, Ahn et al. [
24] developed a pneumatic muscle robotic arm in which an MR brake was equipped on the arm’s joint. Large damping was implemented to reduce the overshoot and oscillation when the manipulator reached the desired position. Similar methods of utilizing MR dampers in robotic arms to improve positioning performance have been verified [
25,
26].
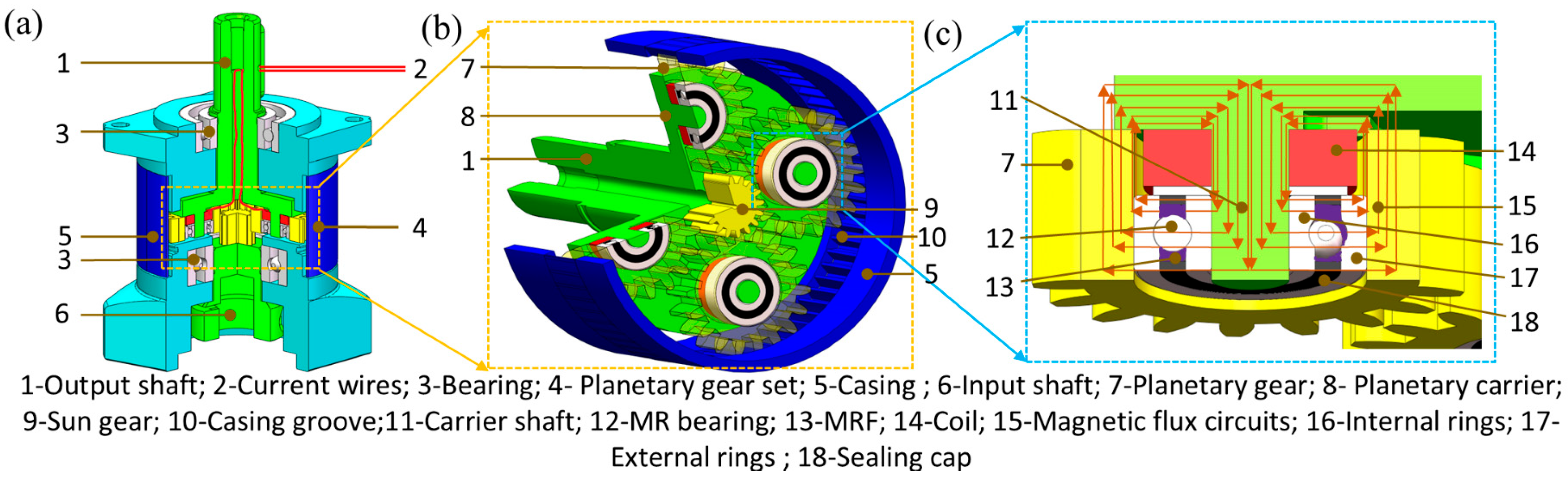
However, one notable issue is that the bulky structure of MR dampers adds considerable complexity and cost to the actuation system, making the robotic arm not practical for real-world applications. Given that the gearbox is indispensable to the actuation system of a robotic arm and that adding variable damping characteristics is the key idea to significantly improving the positioning performance, this work develops an MR gearbox with built-in variable damping capability, which directly endows the actuation system itself with variable damping characteristics, thereby avoiding the need for introducing additional bulky devices. The core structure of the MR gearbox is the MR bearing, which will lock or unlock the carrier shaft and the gear under the control of the magnetic field. It is this locking effect that endows the MR gearbox with damping controllability. When the robotic arm tends to deviate from the target position, the MR gearbox outputs large damping to hinder this deviation; for the other situation where the arm tries to reach the target position, the MR gearbox performs the minimum torque so that the arm approaches the target position as fast as possible. Therefore, this new design will greatly reduce the overshoot and shorten the settling time. Additionally, this built-in structure enables the MR gearbox to be compact and lightweight, and the utilization of the MR device would greatly reduce energy consumption. Those advantages in performance and structure not only improve the arm’s positioning precision but also significantly enhance its practicability.
The rest of the article is organized as follows.
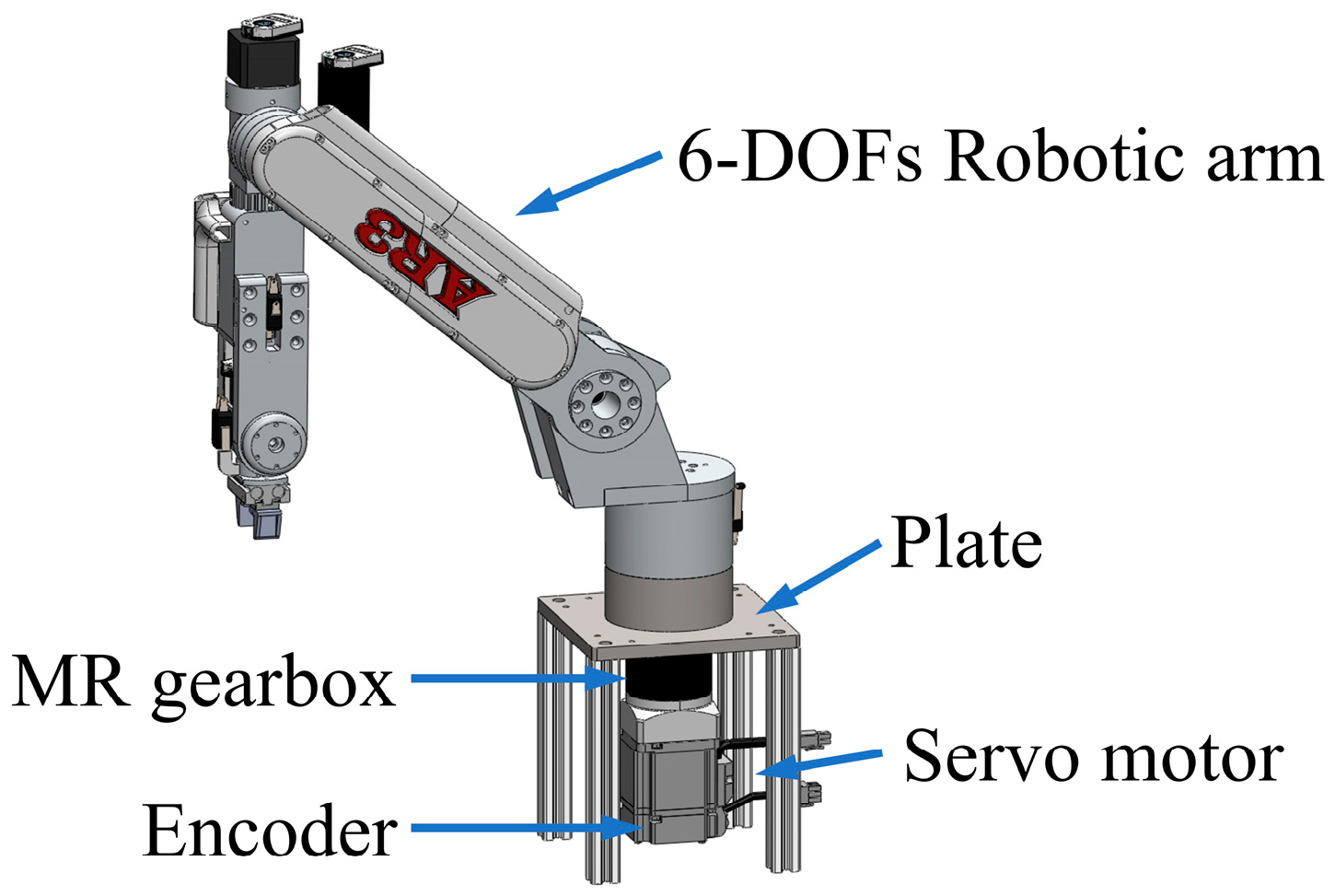
Section 2 presents the structural design and working principle of the proposed MR gearbox. Its characterization tests and mathematical modeling are also performed. As follows, a robotic arm system equipped with the MR gearbox is introduced in
Section 3, with the positioning and anti-disturbance performances of the system being numerically evaluated. In
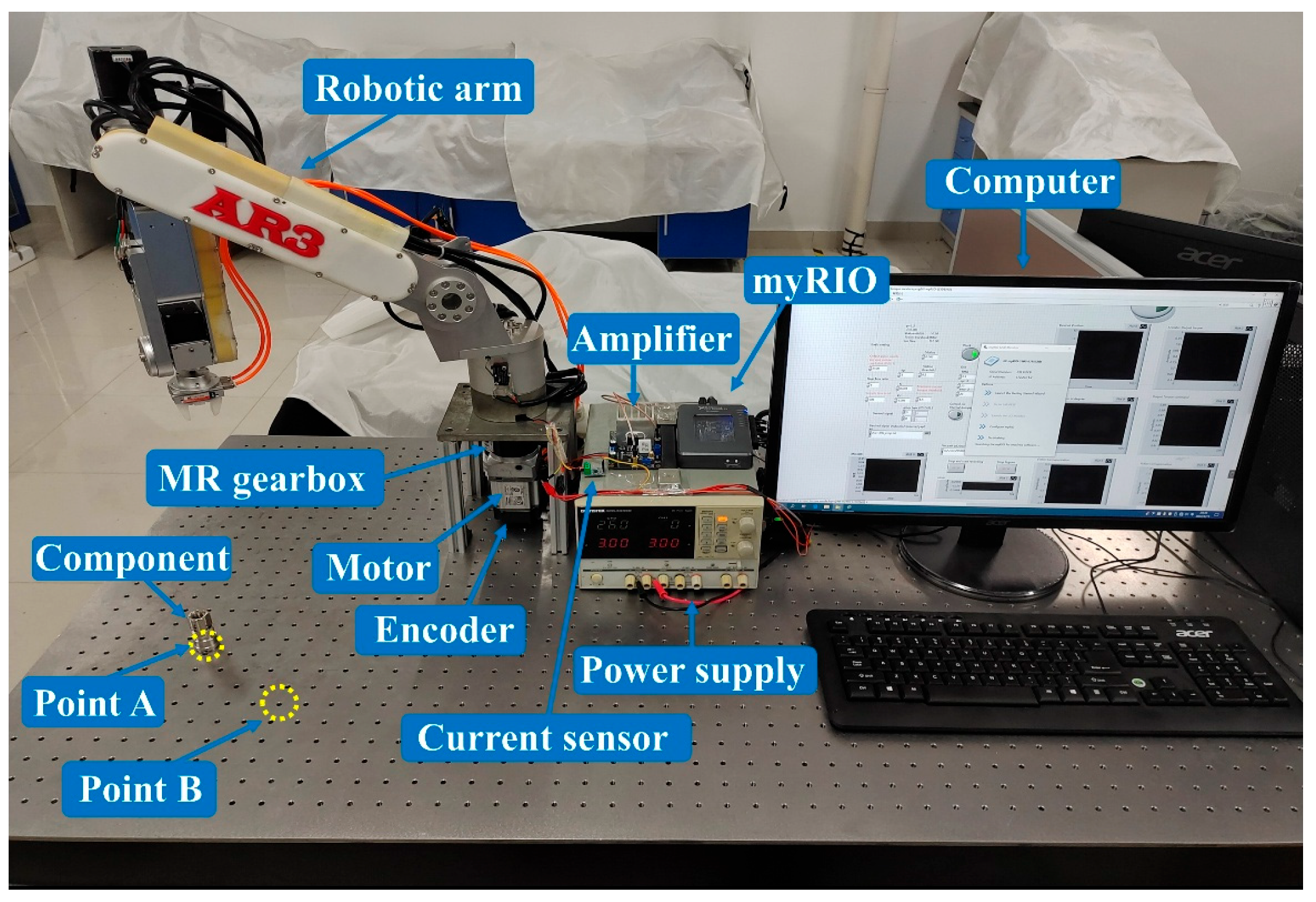
Section 4, the experimental testing setup is demonstrated, and the experimental evaluation is presented. Finally, the conclusion is drawn in
Section 5.
5. Conclusions
This paper presented an innovative MR gearbox featuring variable damping characteristics for improving the positioning and anti-disturbance performance of the robotic arm. The key component of the MR gearbox is the embedded MR bearing, which behaves the locking effect, enabling the MR gearbox to have a variable damping property with a compact structure. This new design eliminates the need for extra bulky devices to add the controllable damping feature to the system.
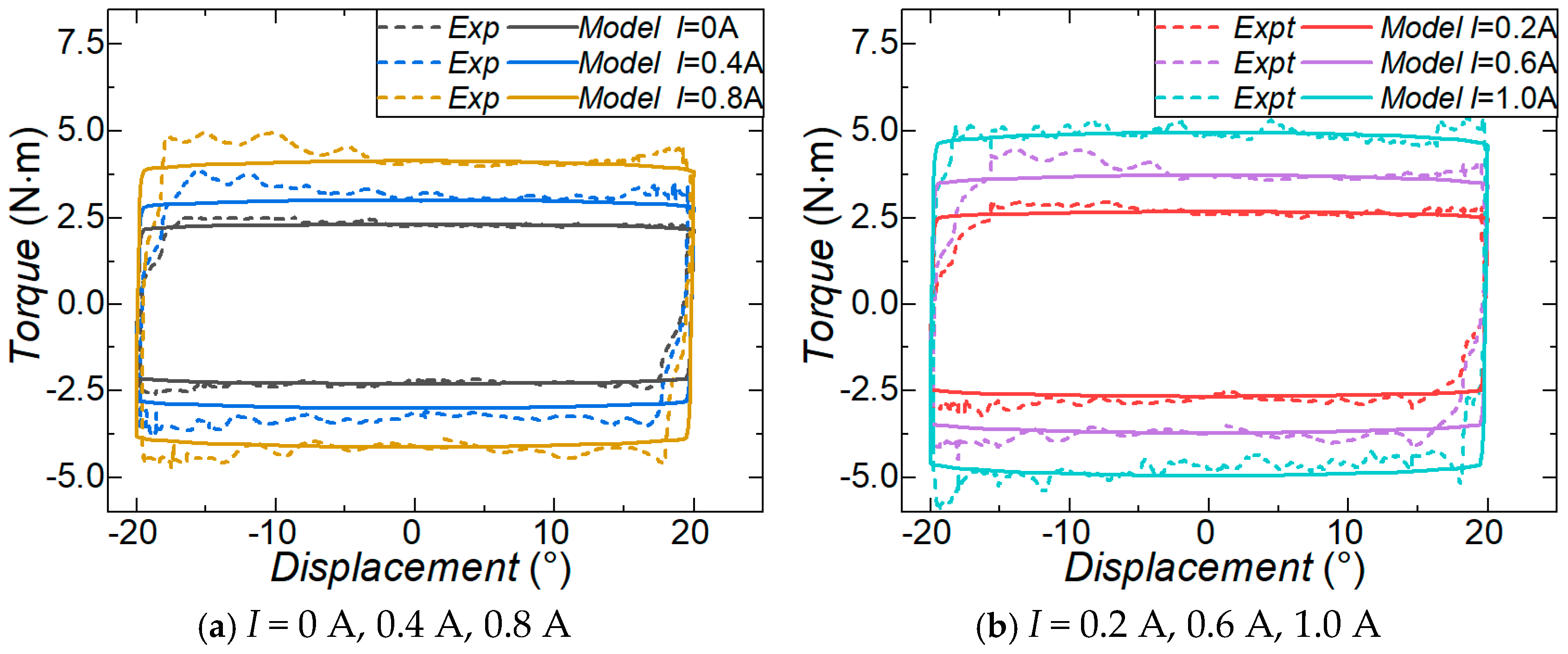
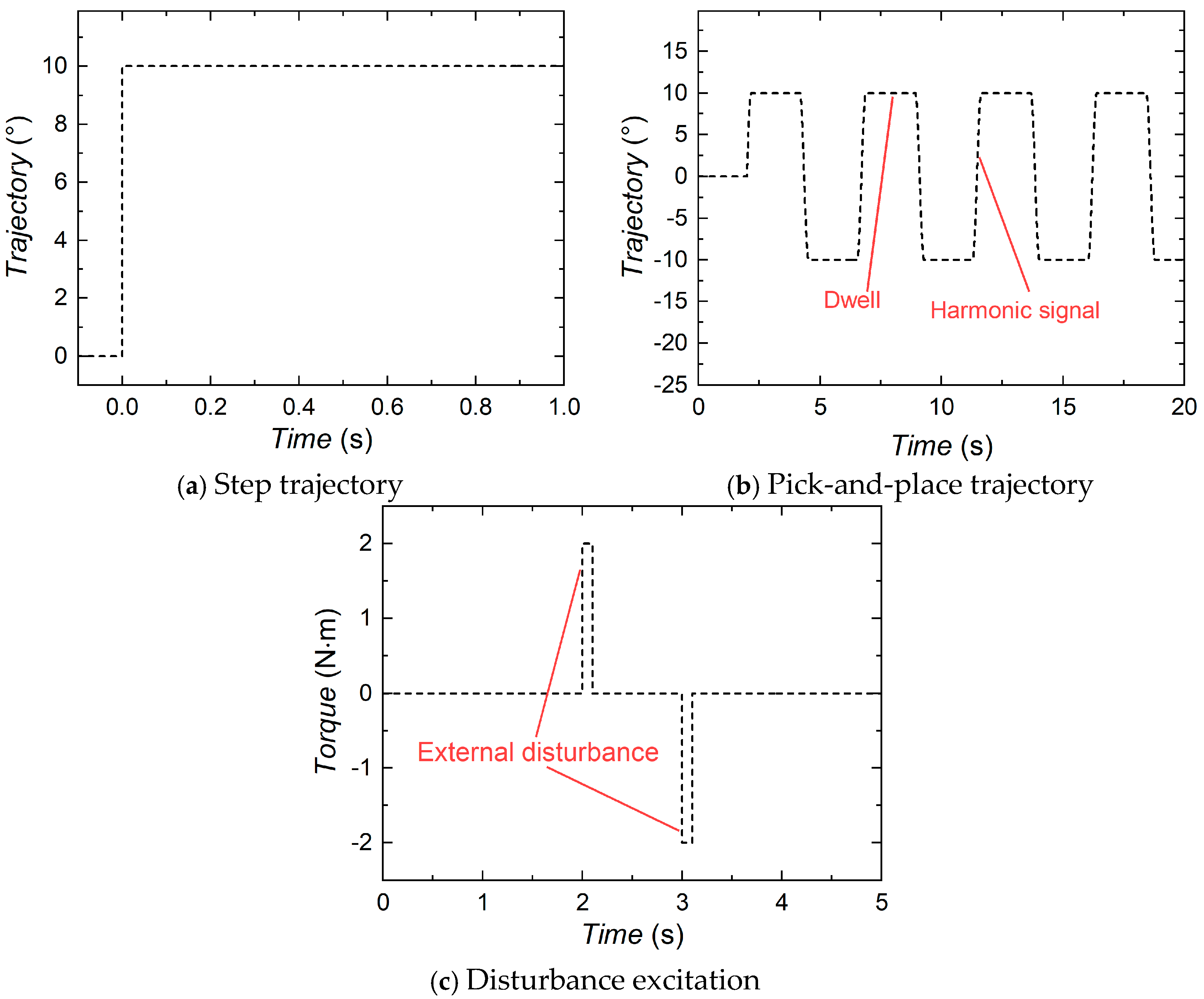
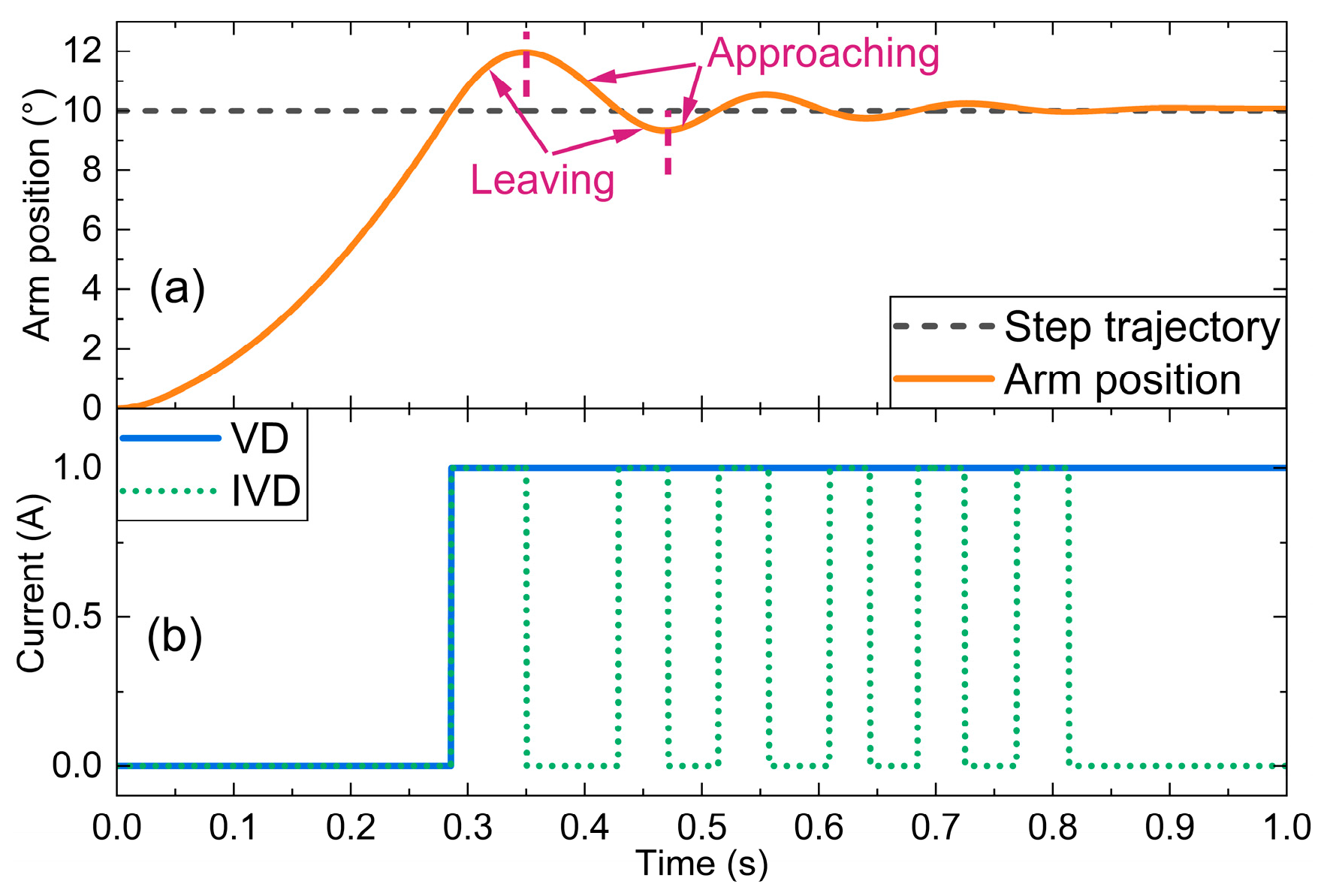
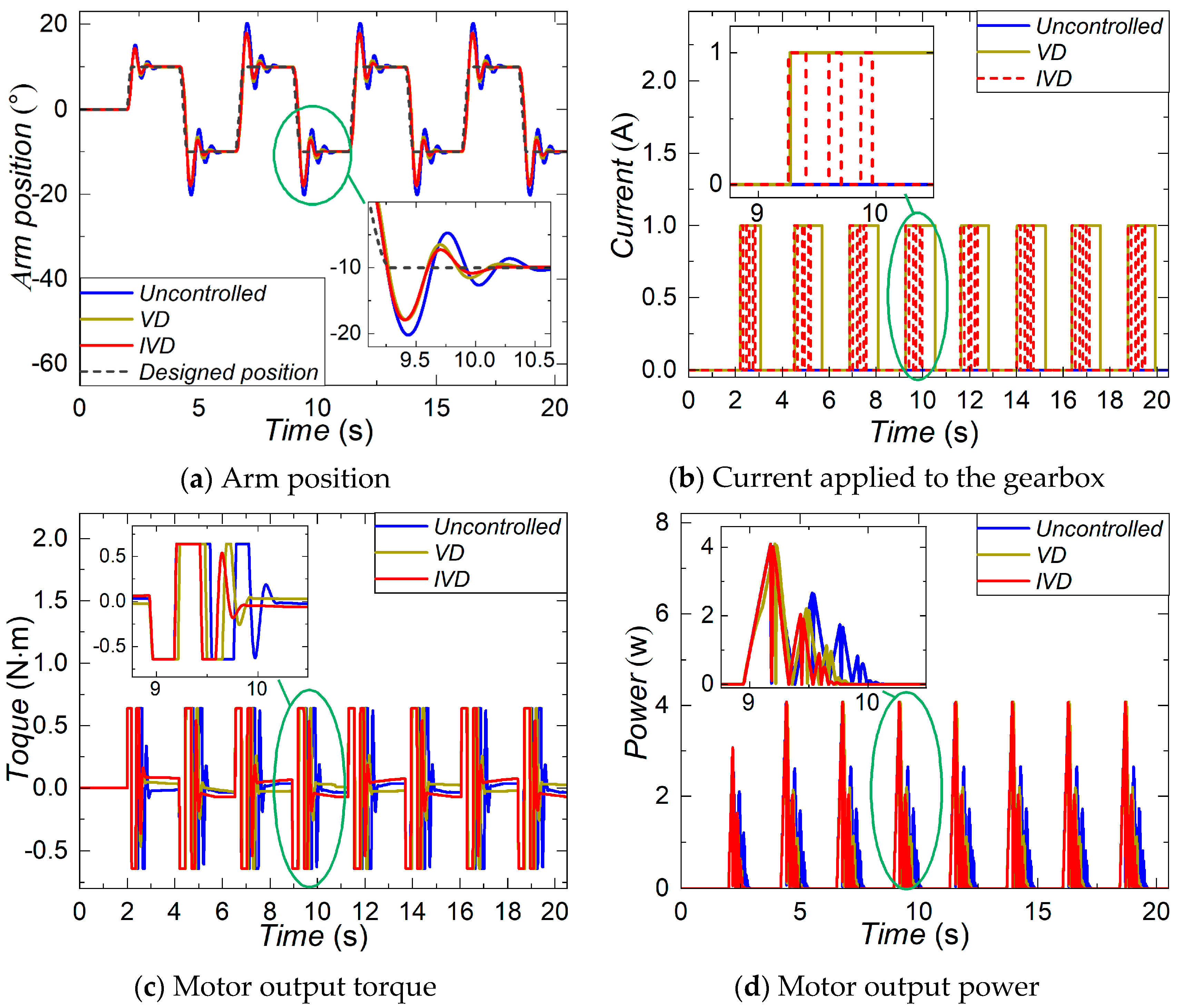
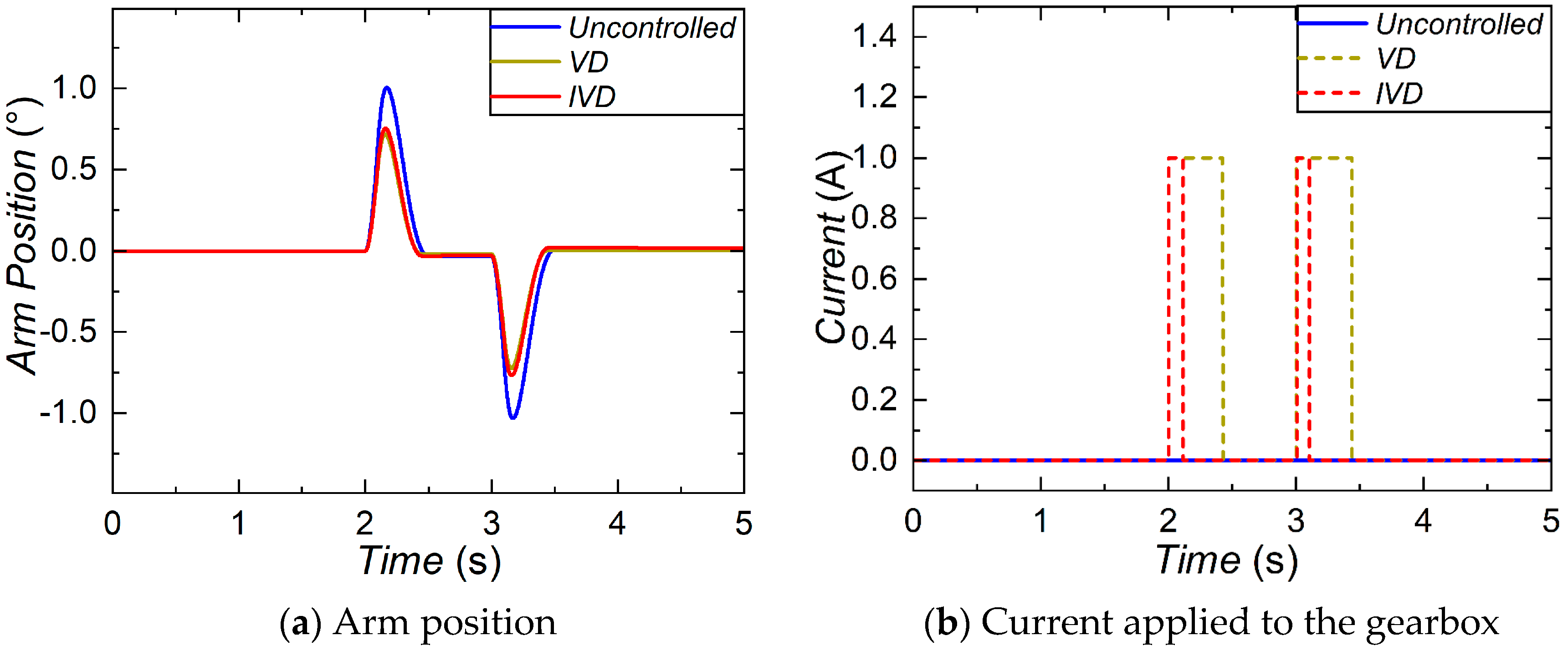
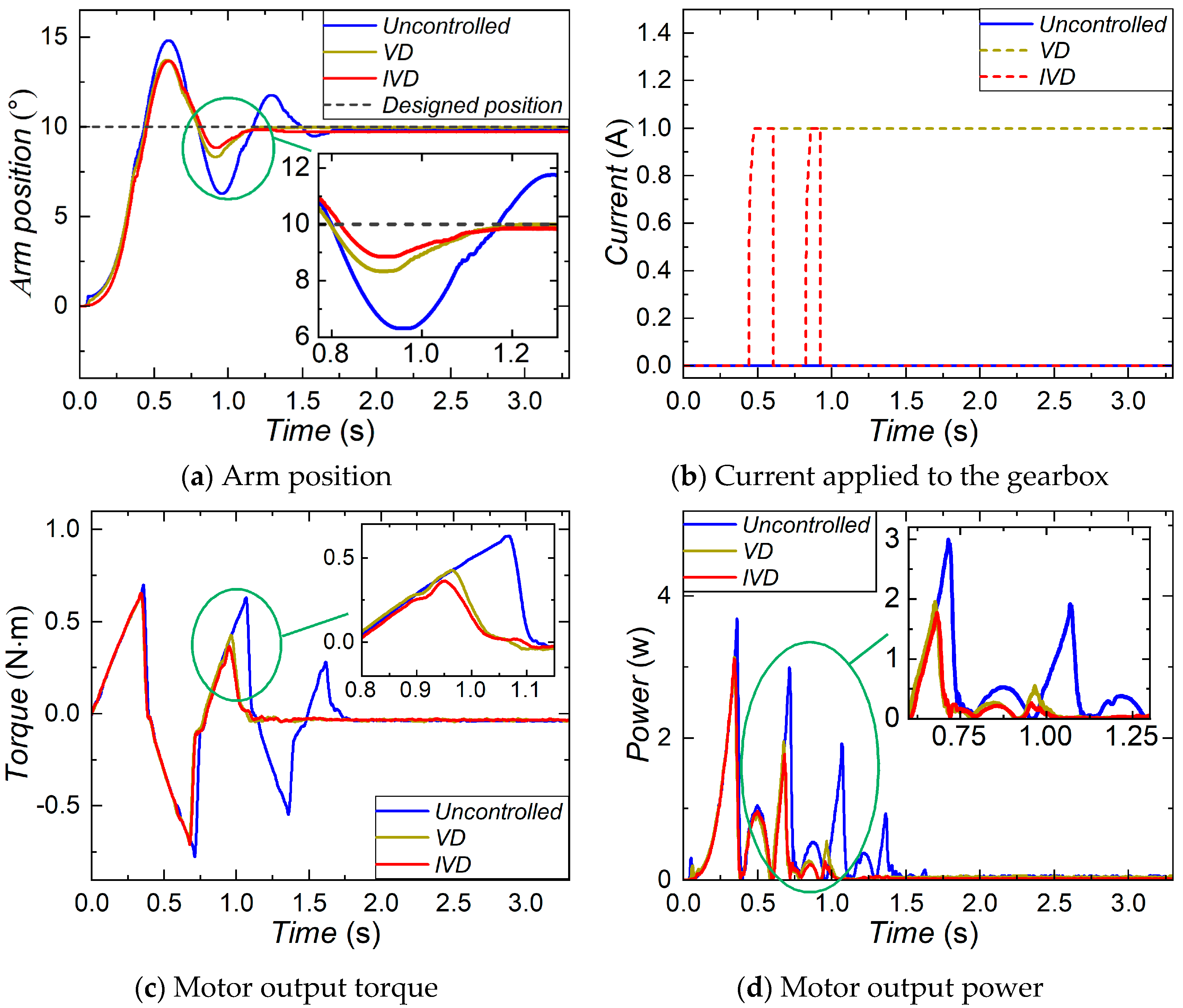
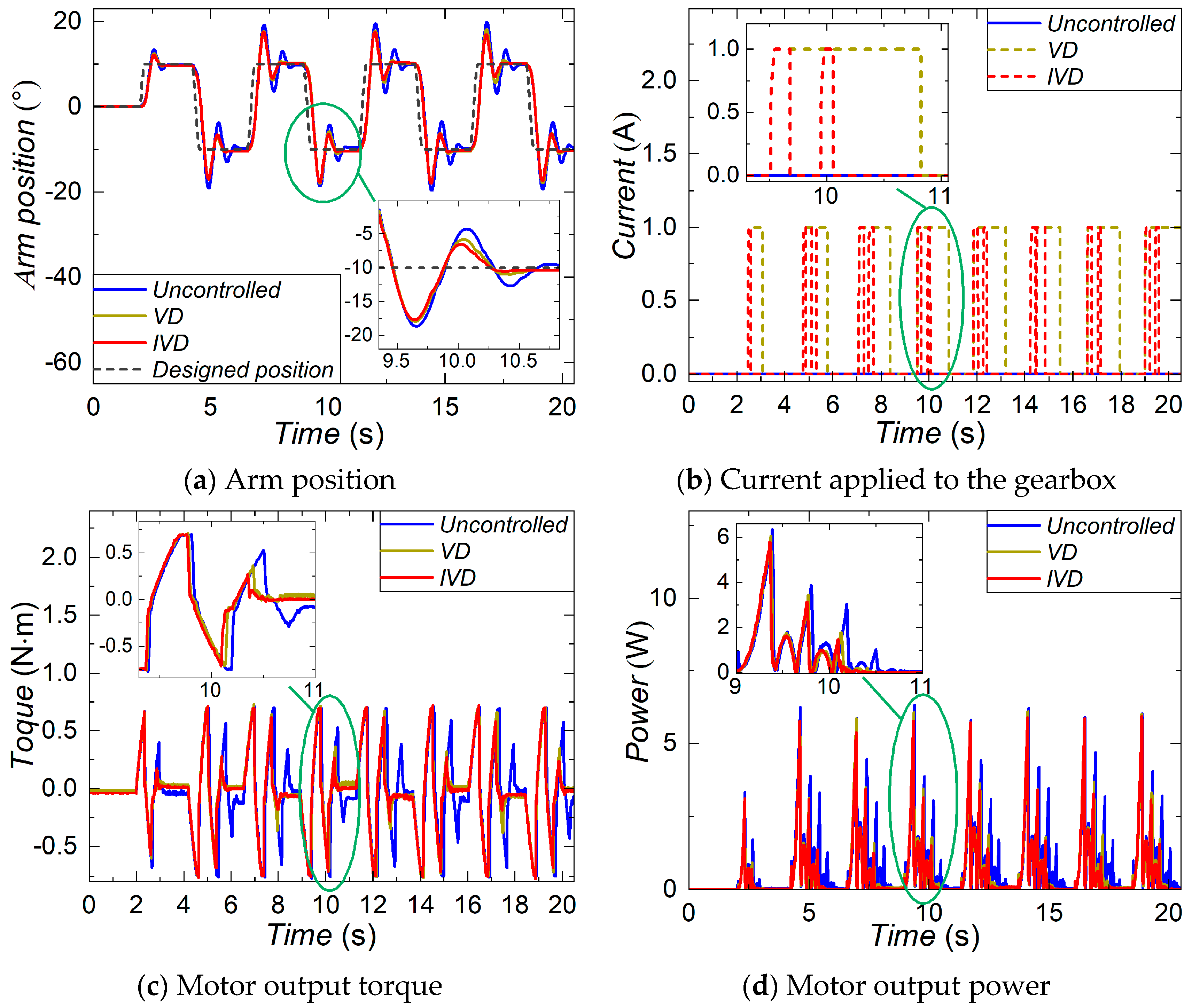
The characterization test revealed that the equivalent damping coefficient of the MR gearbox increases 52.93% from 1.29 to 2.81 when the current is raised from 0 to 1 A. The positioning and the anti-disturbance performance of the robotic arm equipped with the MR gearbox were numerically evaluated. In the positioning performance evaluation, the simulation results of the step trajectory reveal that the IVD control can reduce 11.76% overshoot, 14.73% settling time, and save 14.22% energy, compared with the uncontrolled mode. Similar improvements are found in the pick-and-place trajectory. Compared to VD control, the IVD control shows advantages with shorter settling time, less energy consumed by the motor, and reduced energy consumed by the MR gearbox. In terms of anti-disturbance performance, the IVD control can reduce the disturbance quantity by 24.78% compared with the uncontrolled mode, with far less energy consumption by the MR gearbox than the VD control. With the established experimental platform, the positioning and anti-disturbance performances of the robotic arm were tested. The experimental evaluation yielded consistent results to the numerical simulation and further verified that the positioning and anti-disturbance performances of the robotic arm were largely improved by the proposed MR gearbox.
Even though the proposed MR gearbox is effective in the improvement, its limitations should also be considered. The compact design of the MR gearbox increases the manufacturing costs and maintenance. Additionally, an extra power source and control unit are required to achieve the desired improvements in positioning and anti-disturbance performance, which inevitably adds to the complexity of the system. Nevertheless, the proposed method is still a compact solution, as it eliminates the requirement of extra bulky devices to be added to the system, contributing to enhanced performance in positioning control and anti-disturbance.




 ,
, 





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}