
Detection of Broken Bars in Induction Motors Operating with Closed-Loop Speed Control

 ,
,  ,
,  and
and 
Abstract
1. Introduction
2. Theoretical Background
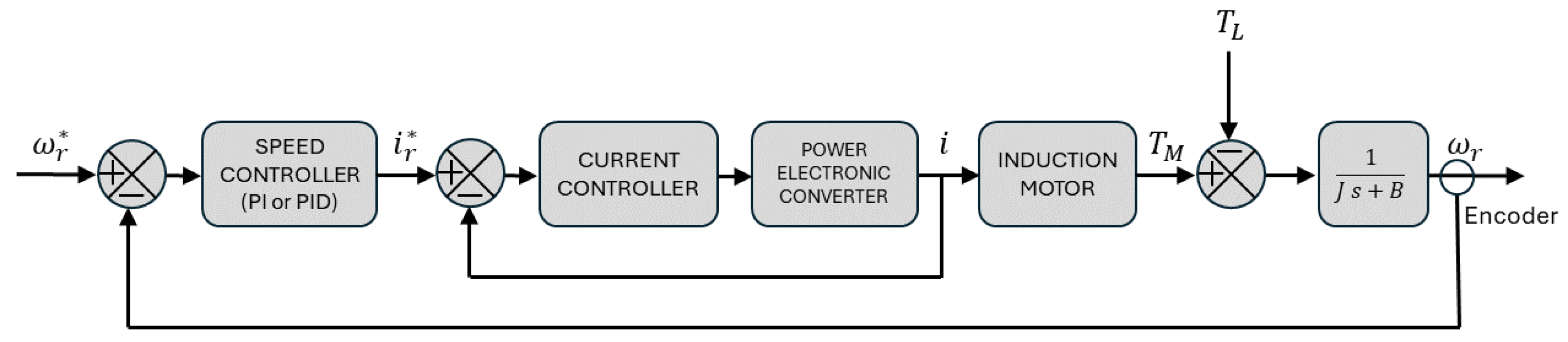
2.1. Closed-Loop Control of Induction Motors
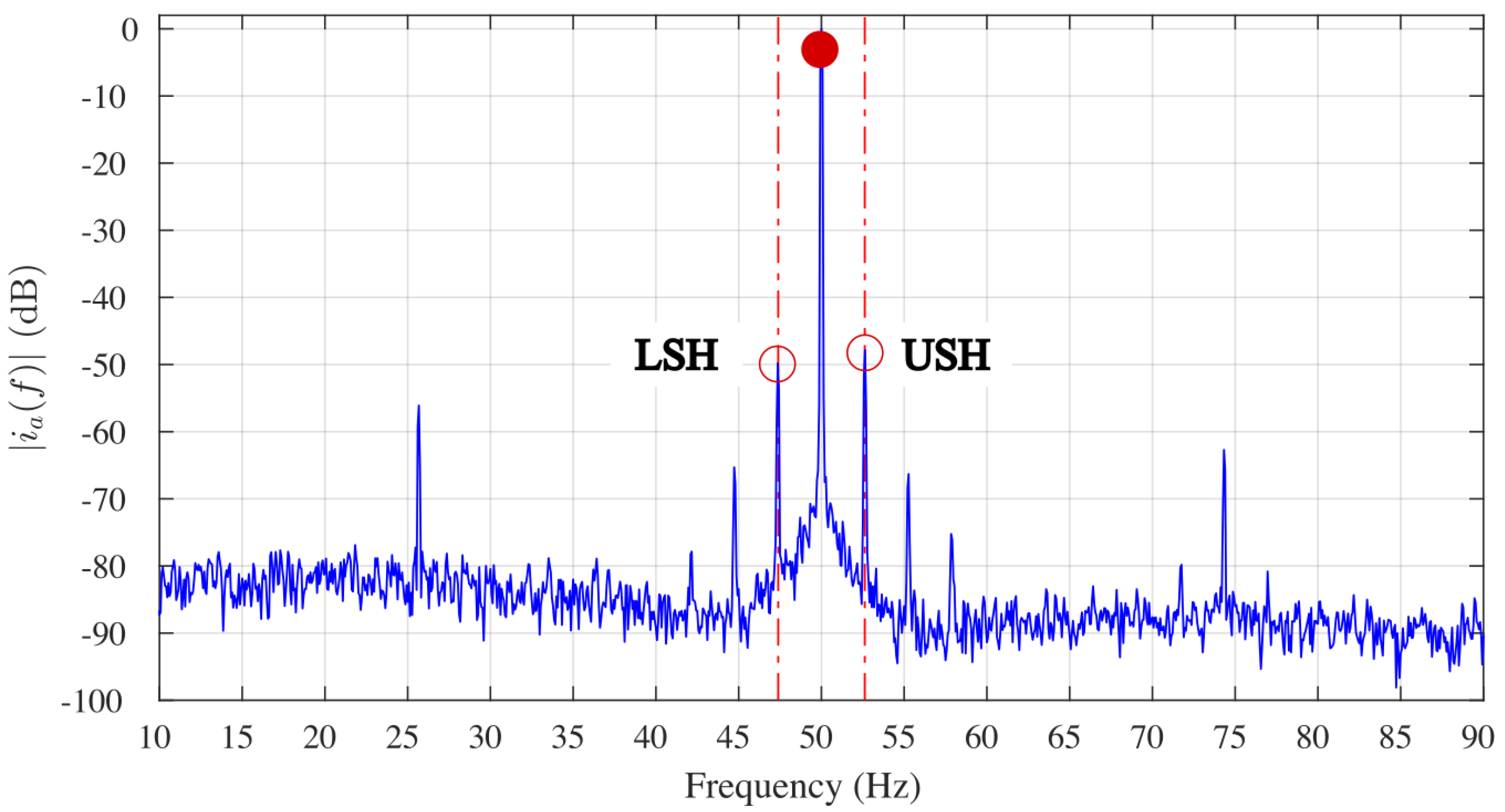
2.2. Broken Rotor Bar Detection and Severity Quantification
3. Laboratory Setup and Speed Controller Tuning
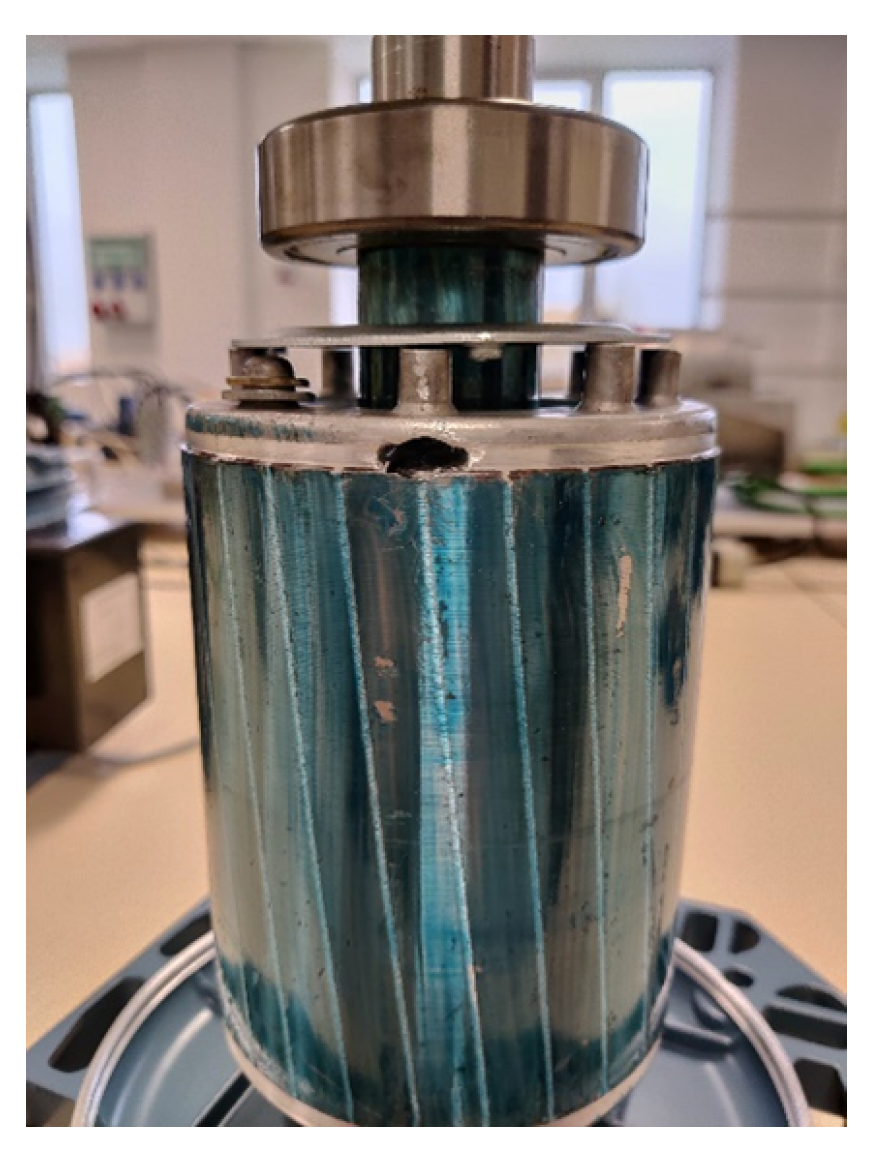
3.1. Laboratory Assembly
- Three-phase induction motor ABB (Västerås, Sweden), with the following specifications: Model M2AA 100 LC-4; Star connection; Rated power of 2.2 kW; Rated voltage of 400 V; Rated current 4.6 A; Rated speed 1450 rpm; Moment of inertia 0.009 kg/m2; 26 rotor bars.
- Power electronic converter from Danfoss (Nordborg, Denmark), model VTL Midi Drive FC 280 134U777.
- Custom-made board with Hall effect sensors by LEM (Meyrin, Switzerland): for voltage measurement (LEM LV25-P) and current measurement (LEM LA25-NP).
- Data acquisition board from National Instruments (Austin, TX, USA), model NI cDAQ-9174 chassis, equipped with 4 NI-9215 modules.
- Laptop PC with National Instruments libraries (NI DAQmx version 2023 Q3.1) and MATLAB software (Version R2023b).
- Incremental encoder from Kübler (Villingen-Schwenningen, Germany), model D-70054 with 1024 PPR.
- Torque transducer from Lorenz Messtechnik (Alfdorf, Germany), model DR-2112-R.
- 24 V truck alternator from Delco Remy (Piracicaba, Brazil), model 19025331.
- Bank of resistors: This consists of 70 resistors of 50 W arranged in 10 columns placed in parallel. Each column contains 7 resistors, also in parallel.
3.2. PID Tuning
3.3. Laboratory Tests
- Sampling time: 15.5 s.
- Sampling frequency: 100 kS/s or kHz.
- Mains power supply.
- Inverter power supply (Danfoss inverter):
- -
- With open-loop control:
- *
- Scalar control.
- -
- With closed-loop control:
- *
- Sensorless space vector control or voltage vector control (according to the inverter manufacturer’s designation).
- *
- Voltage vector control with the two differently tuned PID controllers.
4. Experimental Results
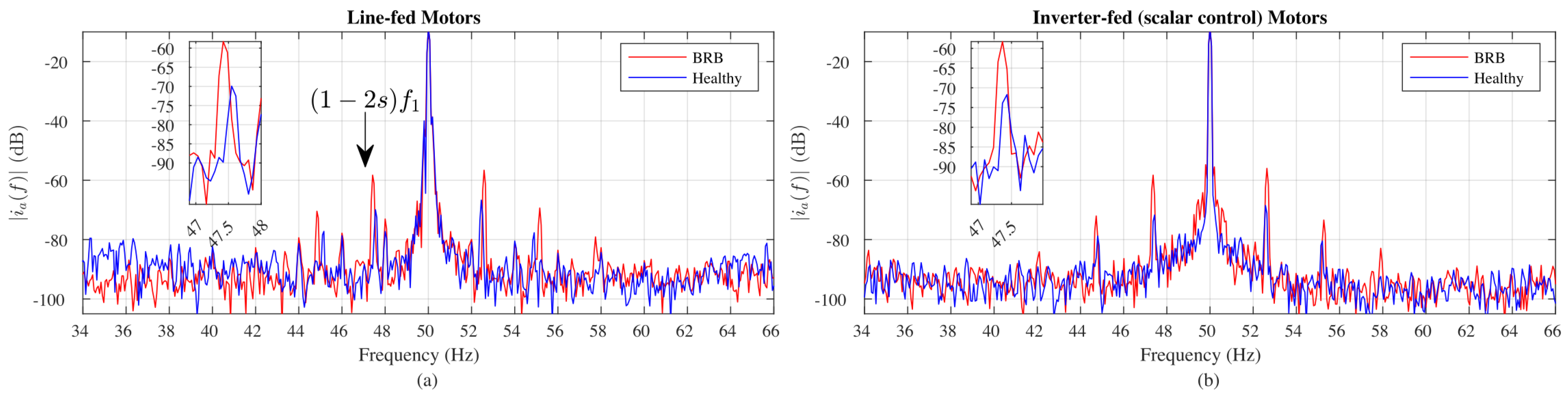
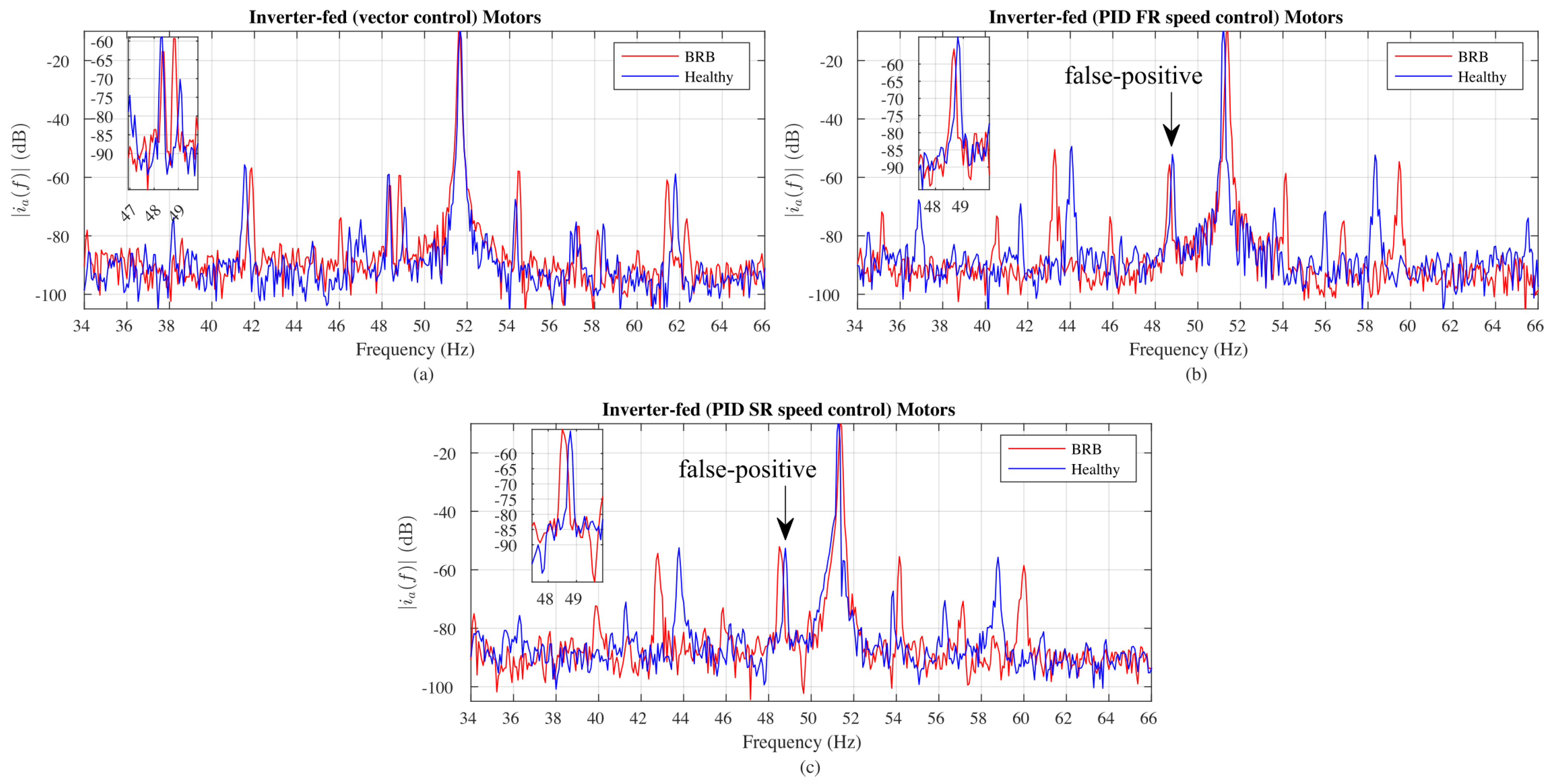
4.1. Current Signature Analysis of Motors Powered by Different Voltage Sources
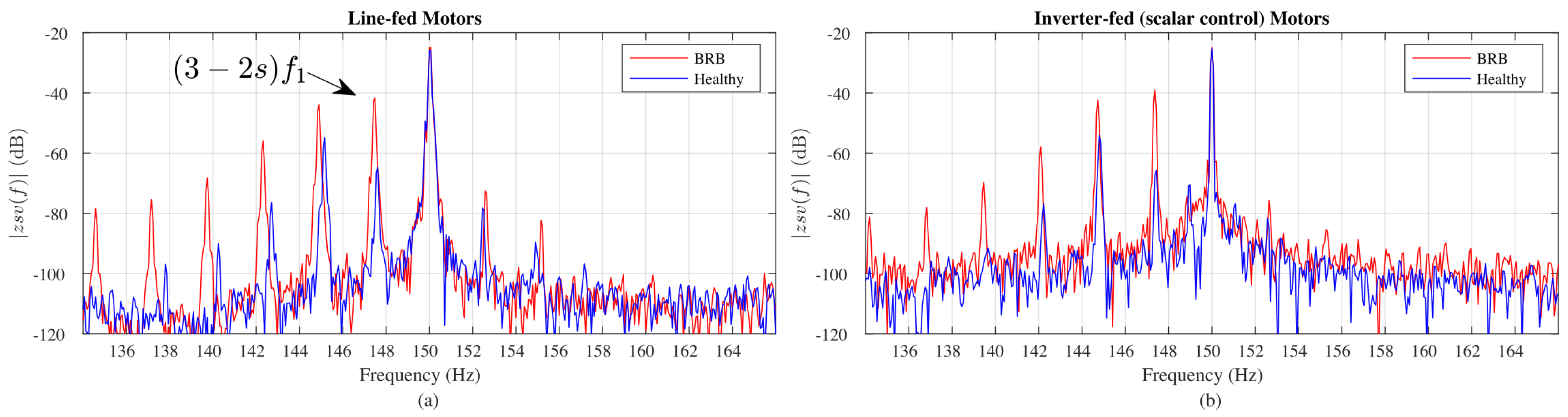
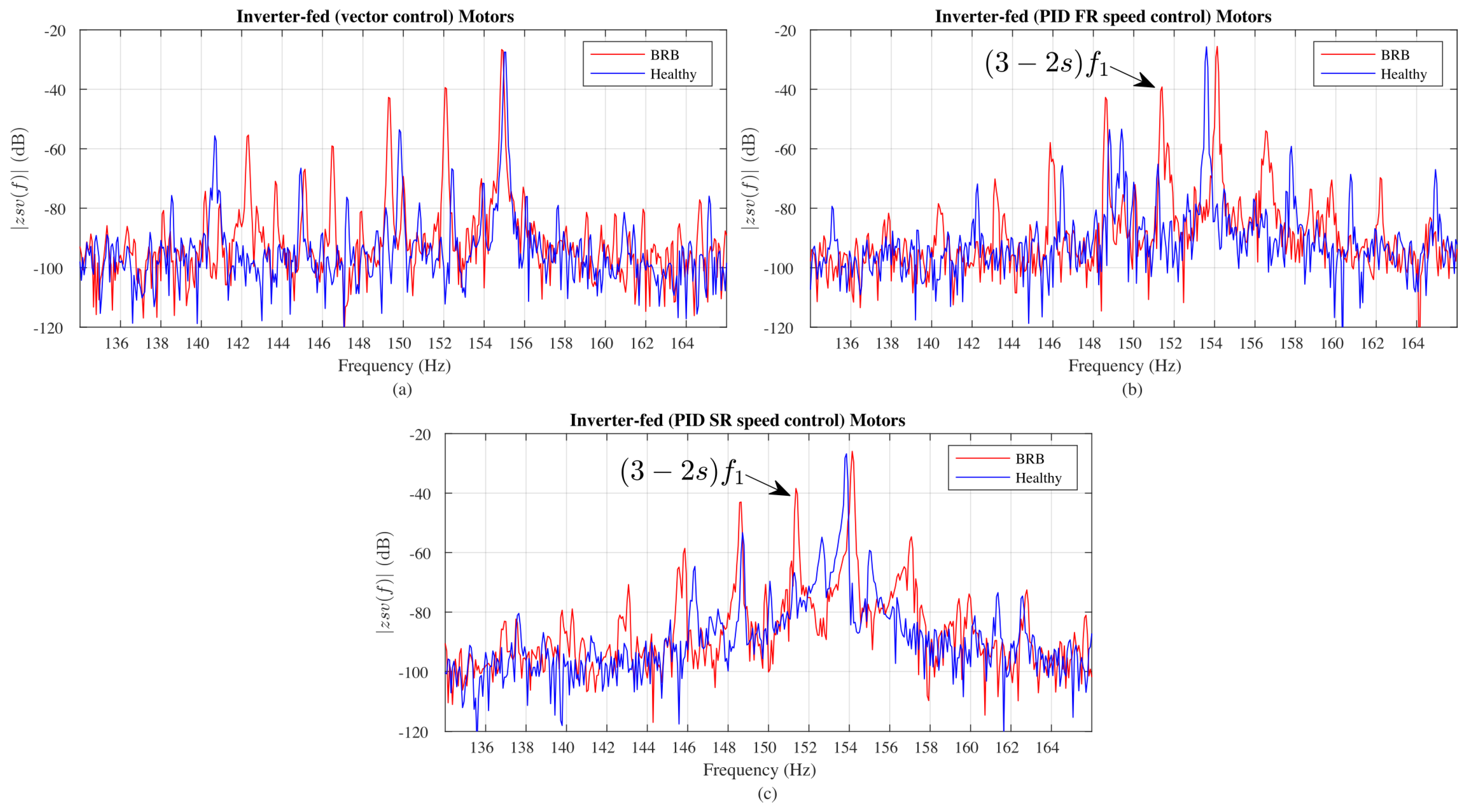
4.2. Zero-Sequence Voltage Analysis of Induction Motors Powered by Different Voltage Sources
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| MCSA | Motor Current Signature Analysis |
| BRB | Broken Rotor Bar |
| ZSV | Zero-Sequence Voltage |
| IM | Induction Motor |
| SFSA | Stray Flux Signature Analysis |
| PWM | Pulse Width Modulation |
| VVC | Vector Voltage Control |
| FOC | Field-Oriented Control |
| IRFOC | Indirect Rotor Field-Oriented Control |
| DRFOC | Direct Rotor Field-Oriented Control |
| DTC | Direct Torque Control |
| VCT | Virtual Current Technique |
| VMM | Vienna Monitoring Methdod |
| PEC | Power Electronic Converter |
| PID | Proportional integral derivative |
| IMC | Internal Model Control |
| LSH | Lower Sideband Harmonic |
| USH | Upper Sideband Harmonic |
| FR | Fast-Response or underdamped PID controller |
| SR | Slow-Response or overdamped PID controller |
| PPR | Pulse per revolution |
| IGBT | Insulated-Gate-Bipolar-Transistor |
References
- Toliyat, H.A.; Nandi, S.; Choi, S.; Meshgin-Kelk, H. Electric Machines: Modeling, Condition Monitoring, and Fault Diagnosis; CRC Press: Boca Raton, FL, USA, 2002. [Google Scholar]
- Ghorbanian, V.; Joksimović, G.; Faiz, J. Fault Diagnosis of Induction Motors; Institution of Engineering & Technology: Lucknow, India, 2017. [Google Scholar]
- Valtierra-Rodriguez, M.; Rivera-Guillen, J.R.; De Santiago-Perez, J.J.; Perez-Soto, G.I.; Amezquita-Sanchez, J.P. Expert System Based on Autoencoders for Detection of Broken Rotor Bars in Induction Motors Employing Start-Up and Steady-State Regimes. Machines 2023, 11, 156. [Google Scholar] [CrossRef]
- Bellini, A.; Filippetti, F.; Tassoni, C.; Capolino, G.A. Advances in Diagnostic Techniques for Induction Machines. IEEE Trans. Ind. Electr. 2008, 55, 4109–4126. [Google Scholar] [CrossRef]
- Thomson, W.T.; Culbert, I. Current Signature Analysis for Condition Monitoring of Cage Induction Motors: Industrial Application and Case Histories; IEEE Press—Wiley: Hoboken, NJ, USA, 2016. [Google Scholar] [CrossRef]
- Bonet-Jara, J.; Morinigo-Sotelo, D.; Duque-Perez, O.; Serrano-Iribarnegaray, L.; Pons-Llinares, J. End-Ring Wear in Deep-Well Submersible Motor Pumps. IEEE Trans. Ind. Appl. 2022, 58, 4522–4531. [Google Scholar] [CrossRef]
- Lee, S.B.; Hyun, D.; Kang, T.j.; Yang, C.; Shin, S.; Kim, H.; Park, S.; Kong, T.S.; Kim, H.D. Identification of False Rotor Fault Indications Produced by Online MCSA for Medium-Voltage Induction Machines. IEEE Trans. Ind. Appl. 2016, 52, 729–739. [Google Scholar] [CrossRef]
- Panagiotou, P.A.; Arvanitakis, I.; Lophitis, N.; Antonino-Daviu, J.A.; Gyftakis, K.N. A New Approach for Broken Rotor Bar Detection in Induction Motors Using Frequency Extraction in Stray Flux Signals. IEEE Trans. Ind. Appl. 2019, 55, 3501–3511. [Google Scholar] [CrossRef]
- Park, Y.; Choi, H.; Lee, S.B.; Gyftakis, K.N. Search Coil-Based Detection of Nonadjacent Rotor Bar Damage in Squirrel Cage Induction Motors. IEEE Trans. Ind. Appl. 2020, 56, 4748–4757. [Google Scholar] [CrossRef]
- Ceban, A.; Pusca, R.; Romary, R. Study of Rotor Faults in Induction Motors Using External Magnetic Field Analysis. IEEE Trans. Ind. Electron. 2012, 59, 2082–2093. [Google Scholar] [CrossRef]
- Zamudio-Ramirez, I.; Mendoza-Ortiz, J.M.; Osomio-Ríos, R.A.; Antonino-Daviu, J.A. Stray Flux Signal Analysis for Faults Detection in Induction Motors During Startup Transient By Means Of Statistical Indicators. In Proceedings of the 2023 IEEE 14th International Symposium on Diagnostics for Electrical Machines, Power Electronics and Drives (SDEMPED), Chania, Greece, 28–31 August 2023; pp. 179–185. [Google Scholar] [CrossRef]
- Choudhary, A.; Mian, T.; Fatima, S. Convolutional neural network based bearing fault diagnosis of rotating machine using thermal images. Measurement 2021, 176, 109196. [Google Scholar] [CrossRef]
- Calderon-Uribe, U.; Lizarraga-Morales, R.A.; Guryev, I.V. Fault Diagnosis in Induction Motors through Infrared Thermal Images Using Convolutional Neural Network Feature Extraction. Machines 2024, 12, 497. [Google Scholar] [CrossRef]
- Alvarado-Hernandez, A.I.; Osornio-Rios, R.A.; Zamudio-Ramirez, I.; Antonino-Daviu, J.A. Hardware Accelerated Thermal Image Processing for the Detection of Induction Motor Faults Based on Statistical Features. In Proceedings of the IECON 2023—49th Annual Conference of the IEEE Industrial Electronics Society, Singapore, 16–19 October 2023; pp. 1–6. [Google Scholar] [CrossRef]
- Garcia-Calva, T.A.; Morinigo-Sotelo, D.; Fernandez-Cavero, V.; Garcia-Perez, A.; Romero-Troncoso, R.d.J. Early Detection of Broken Rotor Bars in Inverter-Fed Induction Motors Using Speed Analysis of Startup Transients. Energies 2021, 14, 1469. [Google Scholar] [CrossRef]
- Antonino-Daviu, J.A.; Pons-Llinares, J.; Lee, S.B. Advanced Rotor Fault Diagnosis for Medium-Voltage Induction Motors via Continuous Transforms. IEEE Trans. Ind. Appl. 2016, 52, 4503–4509. [Google Scholar] [CrossRef]
- Filippetti, F.; Bellini, A.; Capolino, G.A. Condition monitoring and diagnosis of rotor faults in induction machines: State of art and future perspectives. In Proceedings of the 2013 IEEE Workshop on Electrical Machines Design, Control and Diagnosis (WEMDCD), Torino, Italy, 26–27 March 2013; pp. 196–209. [Google Scholar] [CrossRef]
- Martins Cunha, C.C.; Cardoso Filho, B.J. Detection of Rotor Faults in Squirrel-Cage Induction Motors using Adjustable Speed Drives. In Proceedings of the Conference Record of the 2006 IEEE Industry Applications Conference Forty-First IAS Annual Meeting, Tampa, FL, USA, 8–12 October 2006; Volume 5, pp. 2354–2359. [Google Scholar] [CrossRef]
- Cruz, S.M.A.; Cardoso, A.J.M. Diagnosis of rotor faults in direct and indirect FOC induction motor drives. In Proceedings of the 2007 European Conference on Power Electronics and Applications, Aalborg, Denmark, 2–5 September 2007; pp. 1–10. [Google Scholar] [CrossRef]
- Cruz, S.M.A.; Stefani, A.; Filippetti, F.; Cardoso, A.J.M. A New Model-Based Technique for the Diagnosis of Rotor Faults in RFOC Induction Motor Drives. IEEE Trans. Ind. Electron. 2008, 55, 4218–4228. [Google Scholar] [CrossRef]
- Asad, B.; Vaimann, T.; Belahcen, A.; Kallaste, A. Broken Rotor Bar Fault Diagnostic of Inverter Fed Induction Motor Using FFT, Hilbert and Park’s Vector Approach. In Proceedings of the 2018 XIII International Conference on Electrical Machines (ICEM), Alexandroupoli, Greece, 3–6 September 2018; pp. 2352–2358. [Google Scholar] [CrossRef]
- Wang, P.; Wang, K.; Chen, L. Broken Rotor Bars Detection in Inverter-Fed Induction Motors Under Continuous Switching of Different Speed Modes. IEEE Trans. Ind. Electron. 2024, 71, 975–984. [Google Scholar] [CrossRef]
- Bellini, A.; Filippetti, F.; Franceschini, G.; Tassoni, C. Closed-loop control impact on the diagnosis of induction motors faults. IEEE Trans. Ind. Appl. 2000, 36, 1318–1329. [Google Scholar] [CrossRef]
- Kral, C.; Wieser, R.; Pirker, F.; Schagginger, M. Sequences of field-oriented control for the detection of faulty rotor bars in induction machines-the Vienna Monitoring Method. IEEE Trans. Ind. Electron. 2000, 47, 1042–1050. [Google Scholar] [CrossRef]
- Kral, C.; Pirker, F.; Pascoli, G. Model-based detection of rotor faults without rotor position sensor-the sensorless Vienna monitoring method. IEEE Trans. Ind. Appl. 2005, 41, 784–789. [Google Scholar] [CrossRef]
- Concari, C.; Franceschini, G.; Tassoni, C. Rotor fault detection in closed-loop induction motors drives by electric signal analysis. In Proceedings of the 2008 18th International Conference on Electrical Machines, Vilamoura, Portugal, 6–9 September 2008; pp. 1–6. [Google Scholar] [CrossRef]
- Hou, Z.; Huang, J.; Liu, H.; Ye, M.; Liu, Z.; Yang, J. Diagnosis of broken rotor bar fault in open- and closed-loop controlled wye-connected induction motors using zero-sequence voltage. IET Electr. Power Appl. 2017, 11, 1214–1223. [Google Scholar] [CrossRef]
- Mantione, L.; Fernandez-Cavero, V.; Morinigo-Sotelo, D.; Frosini, L. A Time-Frequency Analysis for Broken Rotor Bar Detection in Closed Loop Inverter Fed Induction Motor at Imposed Speed. In Proceedings of the 2023 IEEE 14th International Symposium on Diagnostics for Electrical Machines, Power Electronics and Drives (SDEMPED), Chania, Greece, 28–31 August 2023; pp. 450–456. [Google Scholar] [CrossRef]
- Hou, Z.; Huang, J.; Liu, H.; Wang, T.; Zhao, L. Quantitative broken rotor bar fault detection for closed-loop controlled induction motors. IET Electr. Power Appl. 2016, 10, 403–410. [Google Scholar] [CrossRef]
- Nam, K.H. AC Motor Control and Electrical Vehicle Applications, 2nd ed.; CRC Press, Taylor & Francis Group: New York, NY, USA, 2019. [Google Scholar]
- Antony, N.J.; Mishra, D.; Parveen, S. Sensorless Field Oriented Control of AC Induction Motor Using PI, PD & PID Controllers. In Proceedings of the 2022 IEEE North Karnataka Subsection Flagship International Conference (NKCon), Vijayapura, India, 20–21 November 2022; pp. 1–5. [Google Scholar]
- Sul, S.K. Control of Electric Machine Drive Systems; IEEE Press Series on Power Engineering; Wiley: Hoboken, NJ, USA, 2011. [Google Scholar]
- Rivera, D.E.; Morari, M.; Skogestad, S. Internal model control: PID controller design. Ind. Eng. Chem. Process Des. Dev. 1986, 25, 252–265. [Google Scholar] [CrossRef]
- Deleroi, W. Der Stabbruch im Käfiǵläufer eines Asynchronmotors. Arch. Elektr. 1984, 67, 91–99. [Google Scholar] [CrossRef]
- Bonet-Jara, J.; Quijano-Lopez, A.; Morinigo-Sotelo, D.; Pons-Llinares, J. Sensorless Speed Estimation for the Diagnosis of Induction Motors via MCSA. Review and Commercial Devices Analysis. Sensors 2021, 21, 5037. [Google Scholar] [CrossRef] [PubMed]
- Pons-Llinares, J.; Antonino-Daviu, J.A.; Riera-Guasp, M.; Bin Lee, S.; Kang, T.j.; Yang, C. Advanced Induction Motor Rotor Fault Diagnosis Via Continuous and Discrete Time—Frequency Tools. IEEE Trans. Ind. Electron. 2015, 62, 1791–1802. [Google Scholar] [CrossRef]
- De Boni, G.; Fernandez-Cavero, V.; Frosini, L.; Duque-Perez, O.; Morinigo-Sotelo, D. Fault Harmonics Current Detection in Closed-loop Controlled Induction Motors. In Proceedings of the 2023 IEEE 14th International Symposium on Diagnostics for Electrical Machines, Power Electronics and Drives (SDEMPED), Chania, Greece, 28–31 August 2023; pp. 443–449. [Google Scholar] [CrossRef]
- Garcia, M.; Panagiotou, P.A.; Antonino-Daviu, J.A.; Gyftakis, K.N. Efficiency Assessment of Induction Motors Operating Under Different Faulty Conditions. IEEE Trans. Ind. Electron. 2019, 66, 8072–8081. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| PID Controller Type | (s) | (s) | |
|---|---|---|---|
| Underdamped controller | 0.3000 | 0.0330 | 0.0165 |
| Overdamped controller | 0.6920 | 0.3925 | 0.0945 |
| Control Strategy | Load Condition * (%) | Healthy Motor Condition | Faulty Motor Condition | ||||
|---|---|---|---|---|---|---|---|
| (A) | (mA) | Severity Fault Index ** | (A) | (mA) | Severity Fault Index ** | ||
| Mains | 84.200 | 2.919 | 6.028 | 0.054 | 2.904 | 21.587 | 0.193 |
| 68.500 | 2.567 | 5.226 | 0.053 | 2.581 | 16.753 | 0.169 | |
| 55.700 | 2.203 | 4.174 | 0.049 | 2.404 | 15.202 | 0.164 | |
| Scalar control | 84.200 | 2.940 | 4.982 | 0.044 | 3.007 | 22.630 | 0.196 |
| 68.500 | 2.576 | 4.769 | 0.048 | 2.644 | 17.743 | 0.174 | |
| 55.700 | 2.291 | 3.074 | 0.035 | 2.353 | 14.220 | 0.157 | |
| Sensorless VVC | 84.200 | 2.601 | 6.134 | 0.061 | 2.840 | 20.777 | 0.190 |
| 68.500 | 2.463 | 5.170 | 0.055 | 2.223 | 17.601 | 0.206 | |
| 55.700 | 2.126 | 4.244 | 0.052 | 1.948 | 13.319 | 0.178 | |
| VVC and FR PID | 84.200 | 2.775 | 23.498 | 0.220 | 2.883 | 19.080 | 0.172 |
| 68.500 | 2.342 | 11.886 | 0.132 | 2.284 | 13.428 | 0.153 | |
| 55.700 | 2.007 | 15.930 | 0.206 | 2.283 | 18.806 | 0.214 | |
| VVC and SR PID | 84.200 | 2.867 | 20.741 | 0.188 | 2.694 | 38.297 | 0.370 |
| 68.500 | 2.428 | 13.450 | 0.144 | 2.293 | 24.996 | 0.283 | |
| 55.700 | 2.158 | 10.026 | 0.121 | 2.275 | 17.295 | 0.198 | |
| Control Strategy | Load Condition (%) * | Healthy Motor Condition | Faulty Motor Condition | ||||
|---|---|---|---|---|---|---|---|
| (V) | (V) | Severity Fault Index ** | (V) | (V) | Severity Fault Index ** | ||
| Mains | 84.200 | 4.471 | 0.045 | 0.010 | 4.947 | 0.756 | 0.153 |
| 68.500 | 4.639 | 0.048 | 0.010 | 5.001 | 0.548 | 0.110 | |
| 55.700 | 4.787 | 0.050 | 0.010 | 5.224 | 0.508 | 0.097 | |
| Scalar control | 84.200 | 4.118 | 0.038 | 0.009 | 4.311 | 0.869 | 0.202 |
| 68.500 | 4.340 | 0.049 | 0.011 | 4.467 | 0.688 | 0.154 | |
| 55.700 | 4.543 | 0.044 | 0.010 | 4.613 | 0.508 | 0.110 | |
| Sensorless VVC | 84.200 | 3.428 | 0.041 | 0.012 | 3.549 | 0.893 | 0.252 |
| 68.500 | 4.012 | 0.044 | 0.011 | 4.024 | 0.759 | 0.189 | |
| 55.700 | 4.039 | 0.044 | 0.011 | 4.132 | 0.622 | 0.151 | |
| VVC and FR PID | 84.200 | 3.815 | 0.039 | 0.010 | 3.847 | 0.906 | 0.236 |
| 68.500 | 4.133 | 0.056 | 0.014 | 4.004 | 0.707 | 0.177 | |
| 55.700 | 4.030 | 0.058 | 0.014 | 4.122 | 0.656 | 0.159 | |
| VVC and SR PID | 84.200 | 3.878 | 0.042 | 0.011 | 4.009 | 0.977 | 0.244 |
| 68.500 | 3.896 | 0.049 | 0.013 | 4.026 | 0.746 | 0.185 | |
| 55.700 | 4.094 | 0.053 | 0.013 | 4.037 | 0.598 | 0.148 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Muzio, F.; Mantione, L.; Garcia-Calva, T.; Frosini, L.; Morinigo-Sotelo, D. Detection of Broken Bars in Induction Motors Operating with Closed-Loop Speed Control. Machines 2024, 12, 662. https://doi.org/10.3390/machines12090662
Muzio F, Mantione L, Garcia-Calva T, Frosini L, Morinigo-Sotelo D. Detection of Broken Bars in Induction Motors Operating with Closed-Loop Speed Control. Machines. 2024; 12(9):662. https://doi.org/10.3390/machines12090662
Chicago/Turabian StyleMuzio, Francesca, Lorenzo Mantione, Tomas Garcia-Calva, Lucia Frosini, and Daniel Morinigo-Sotelo. 2024. "Detection of Broken Bars in Induction Motors Operating with Closed-Loop Speed Control" Machines 12, no. 9: 662. https://doi.org/10.3390/machines12090662
APA StyleMuzio, F., Mantione, L., Garcia-Calva, T., Frosini, L., & Morinigo-Sotelo, D. (2024). Detection of Broken Bars in Induction Motors Operating with Closed-Loop Speed Control. Machines, 12(9), 662. https://doi.org/10.3390/machines12090662