
Multi-Level Behavioral Mechanisms and Kinematic Modeling Research of Cellular Space Robot

 ,
,
Abstract
1. Introduction
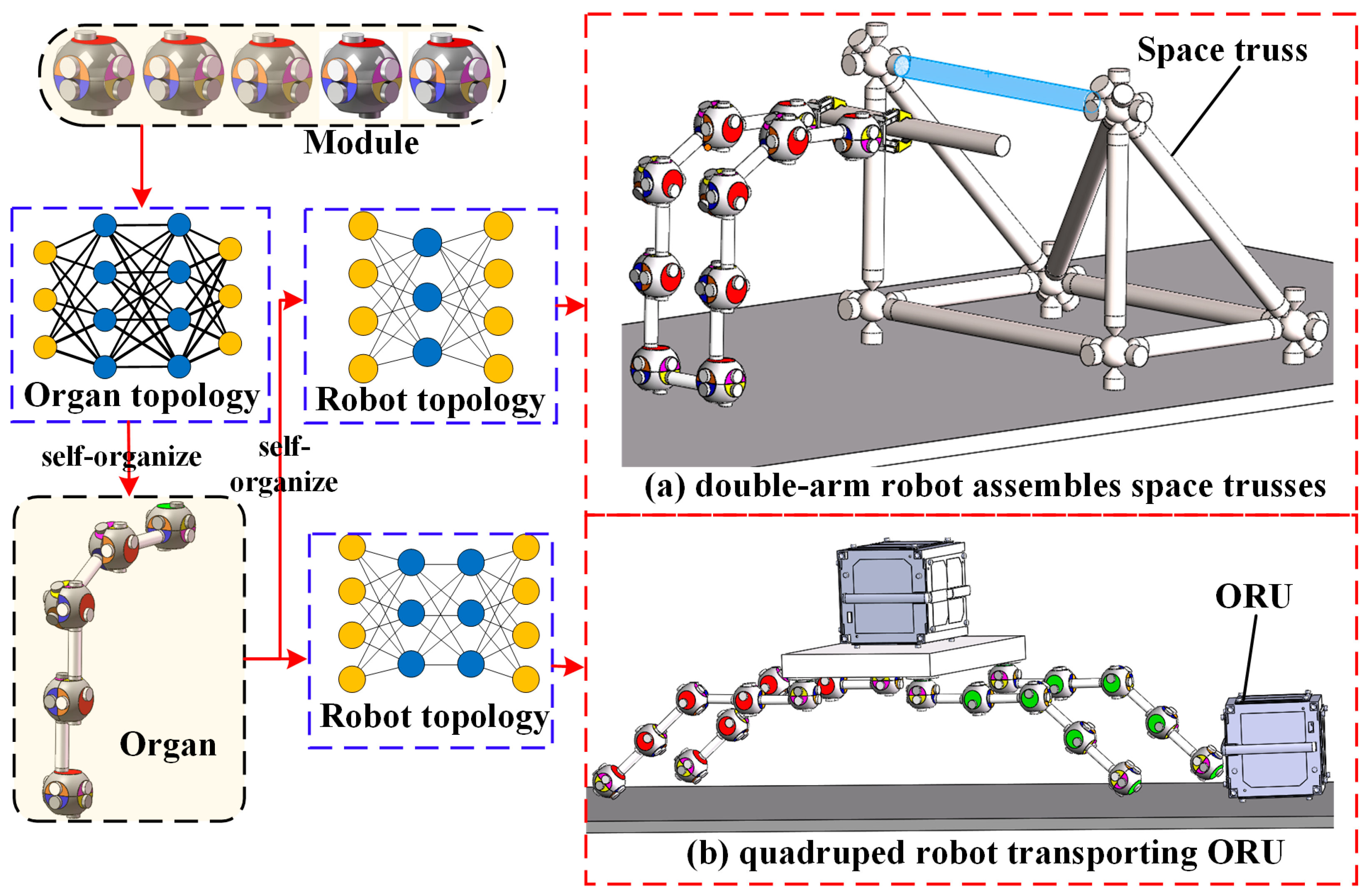
2. Cellular Space Robot System
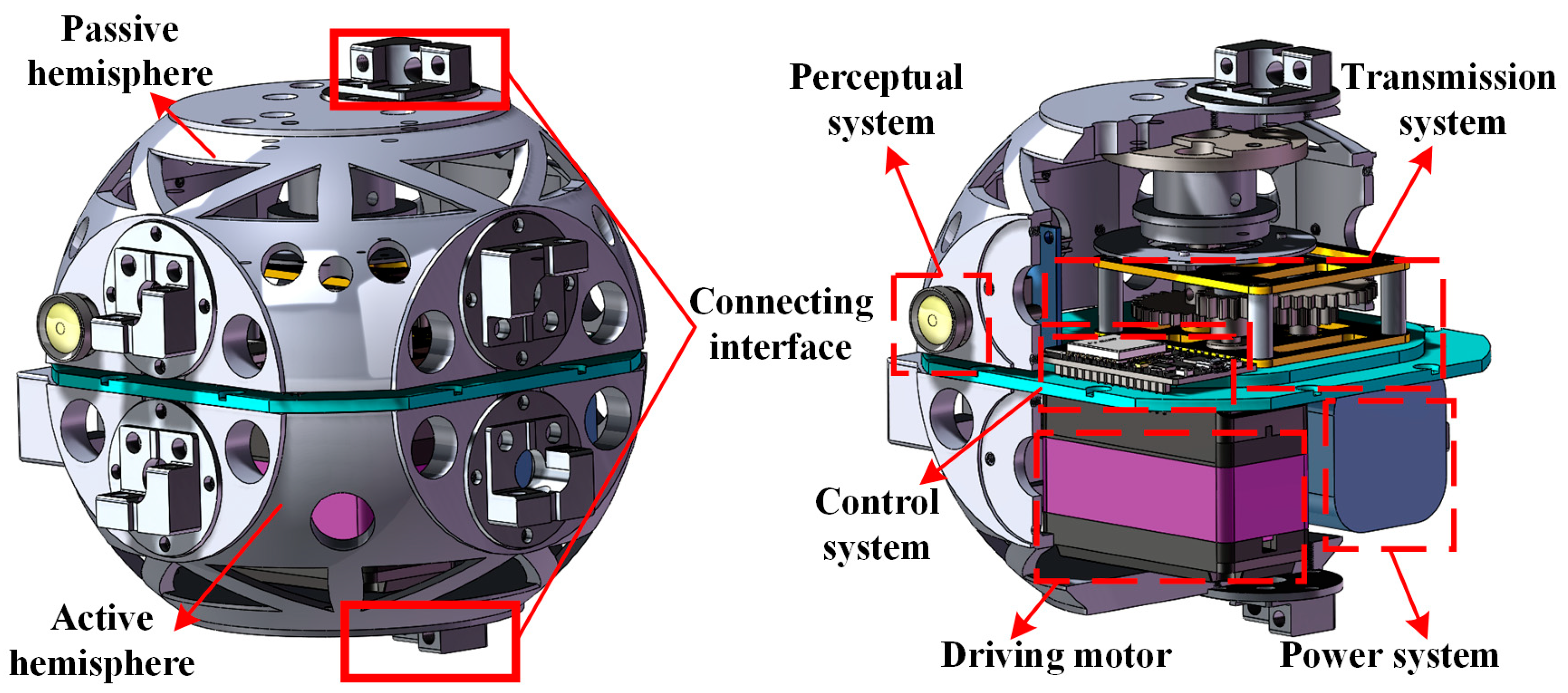
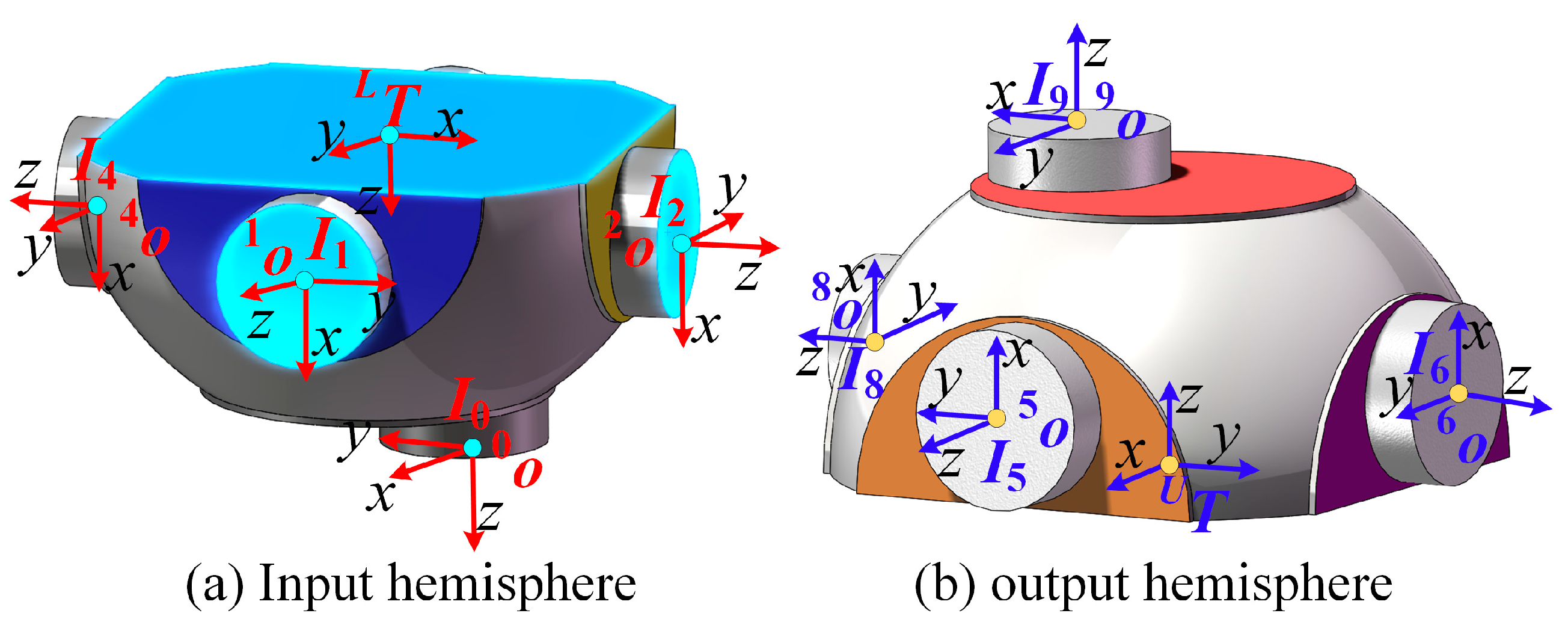
2.1. CSR Structure and Working Mechanism
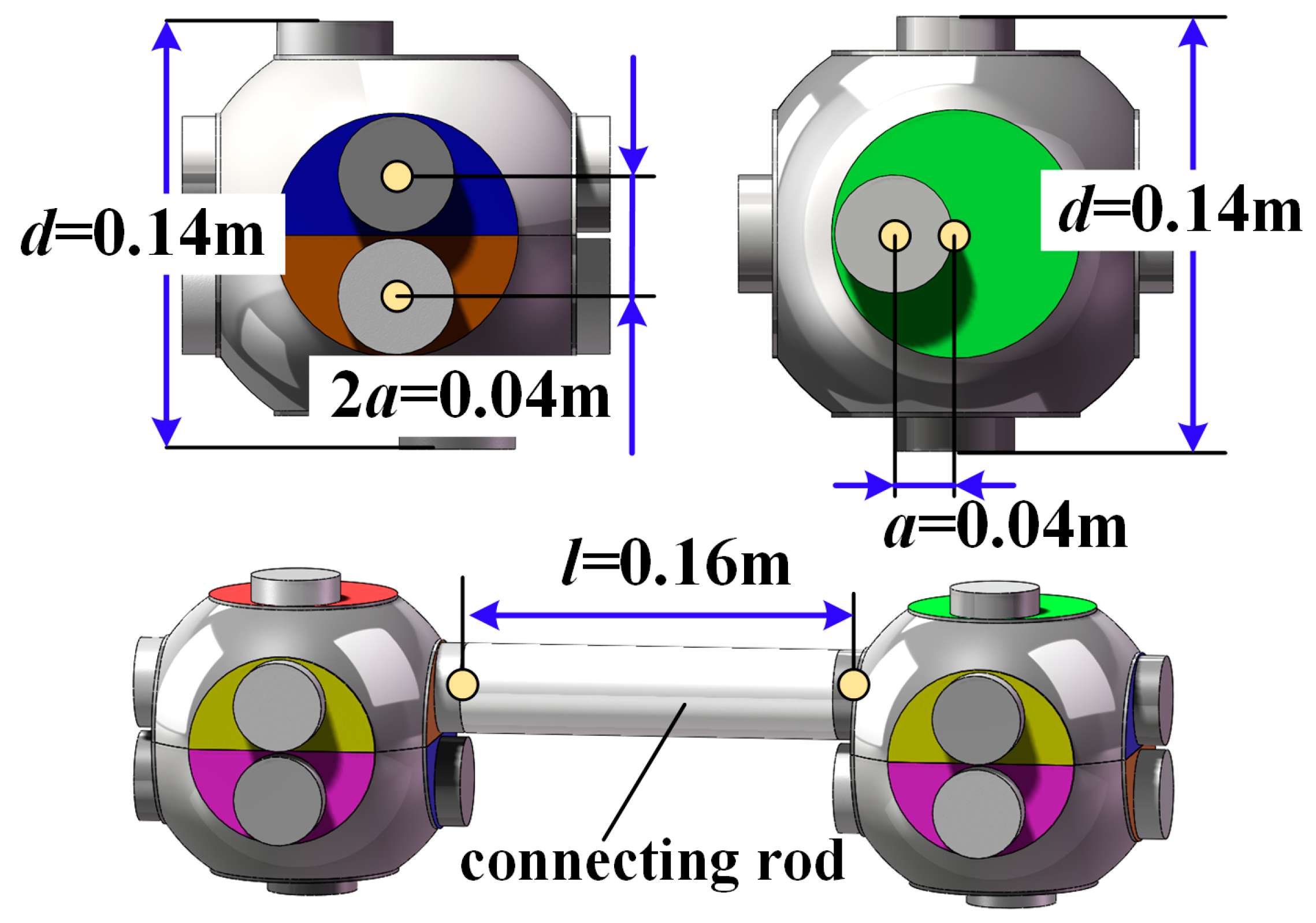
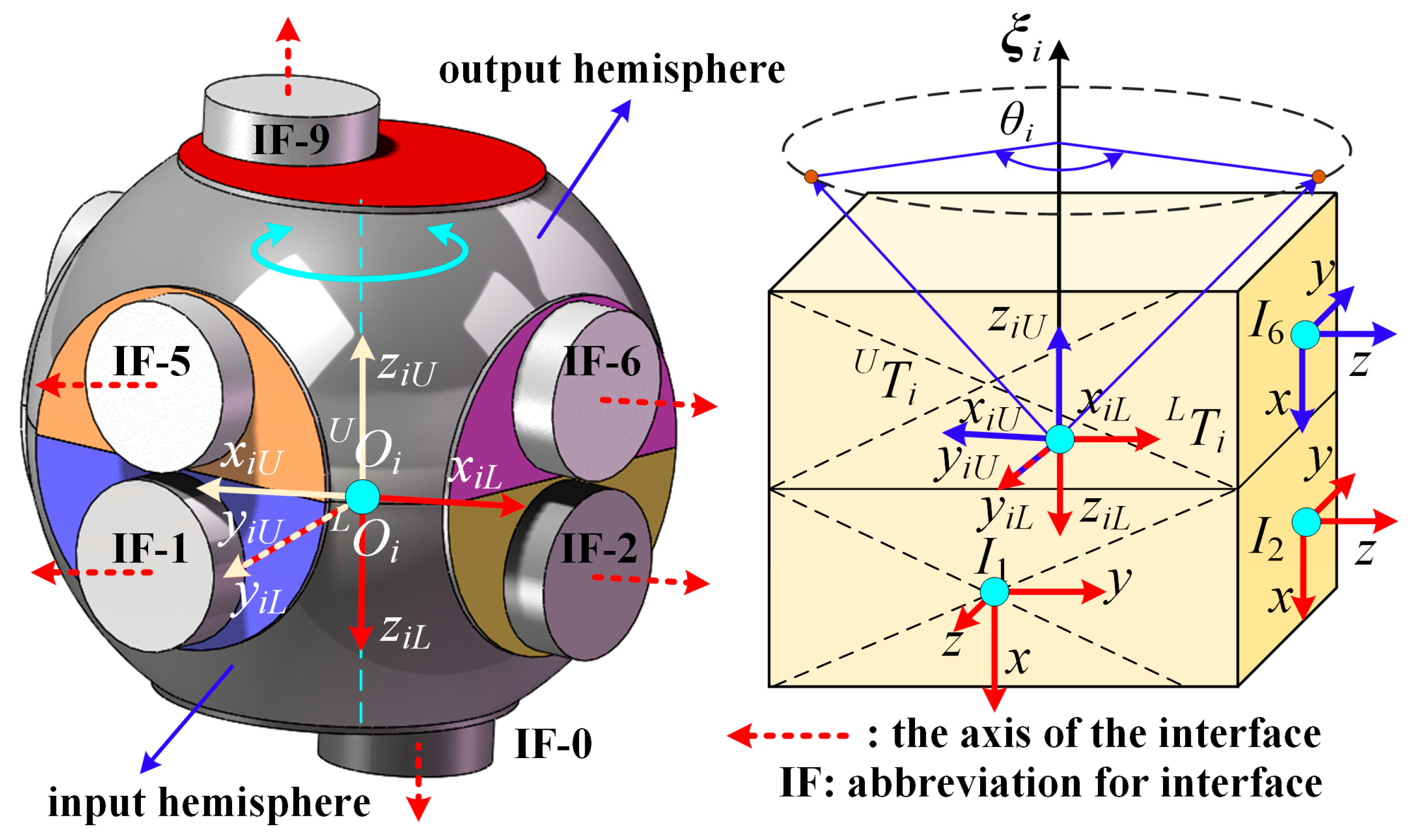
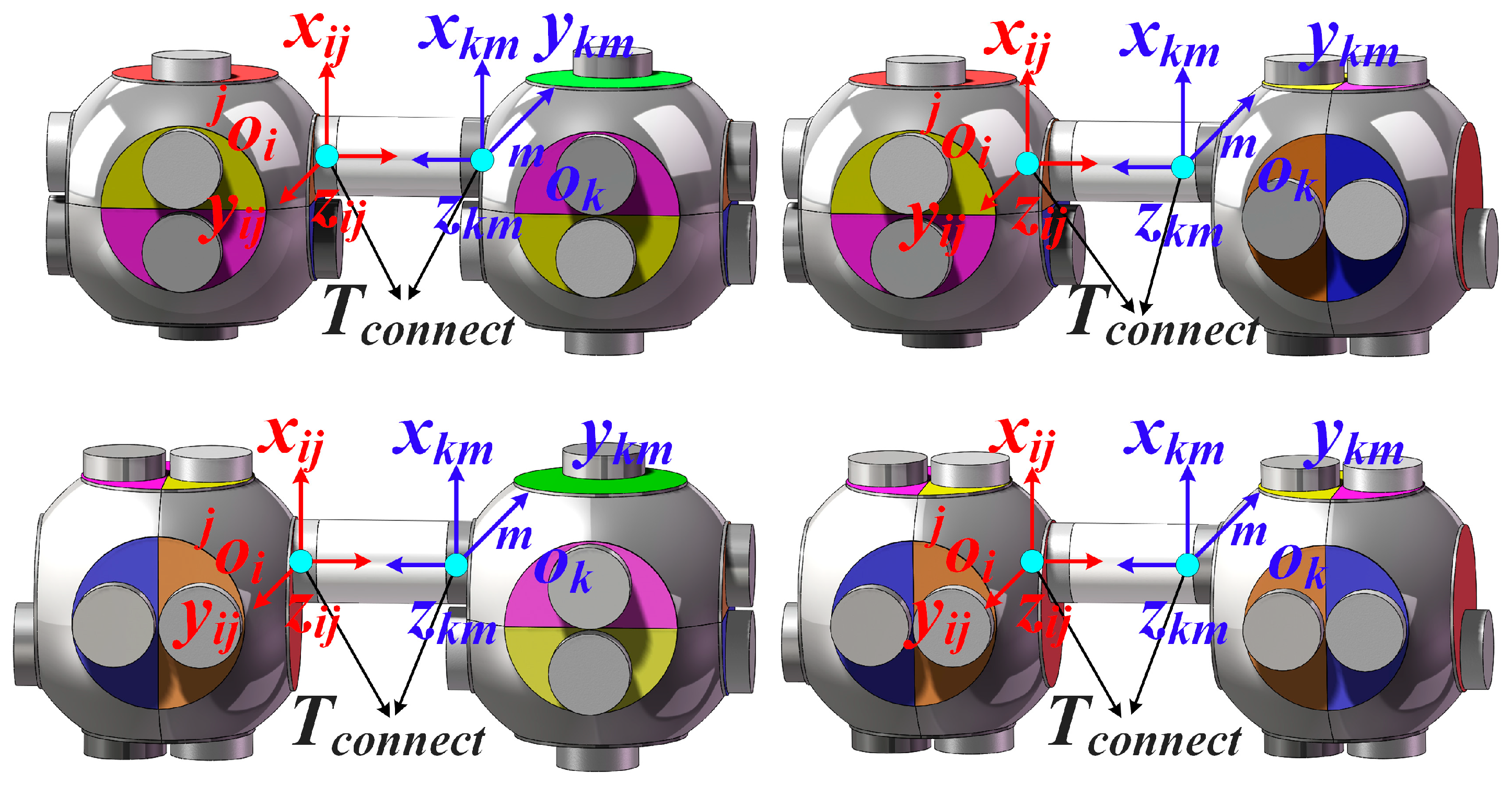
2.2. The Kinematic Model of the CSR Module
3. Multi-Level Topological Description of CSR
3.1. CSR Multi-Level Topology Reachability Analysis
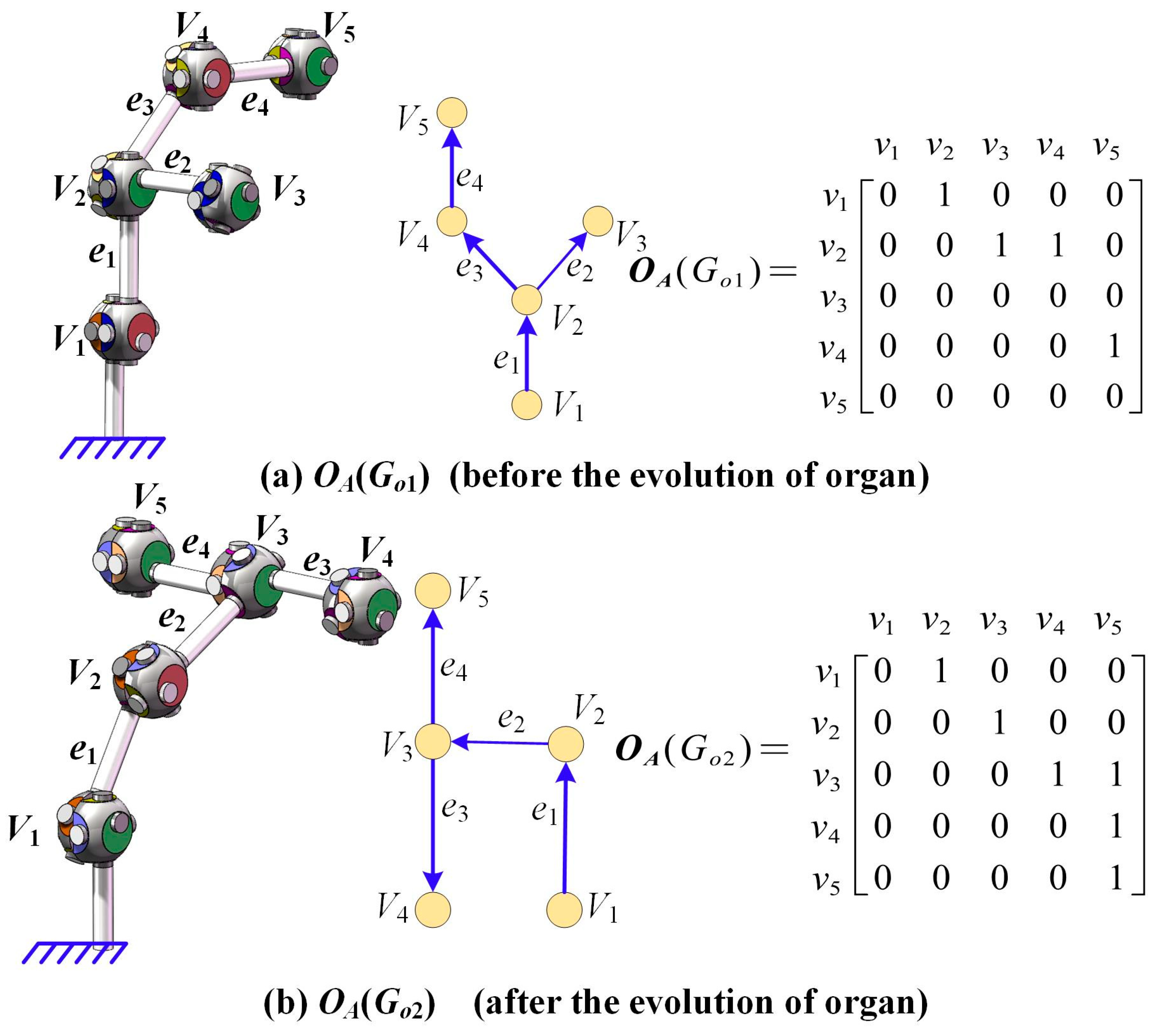
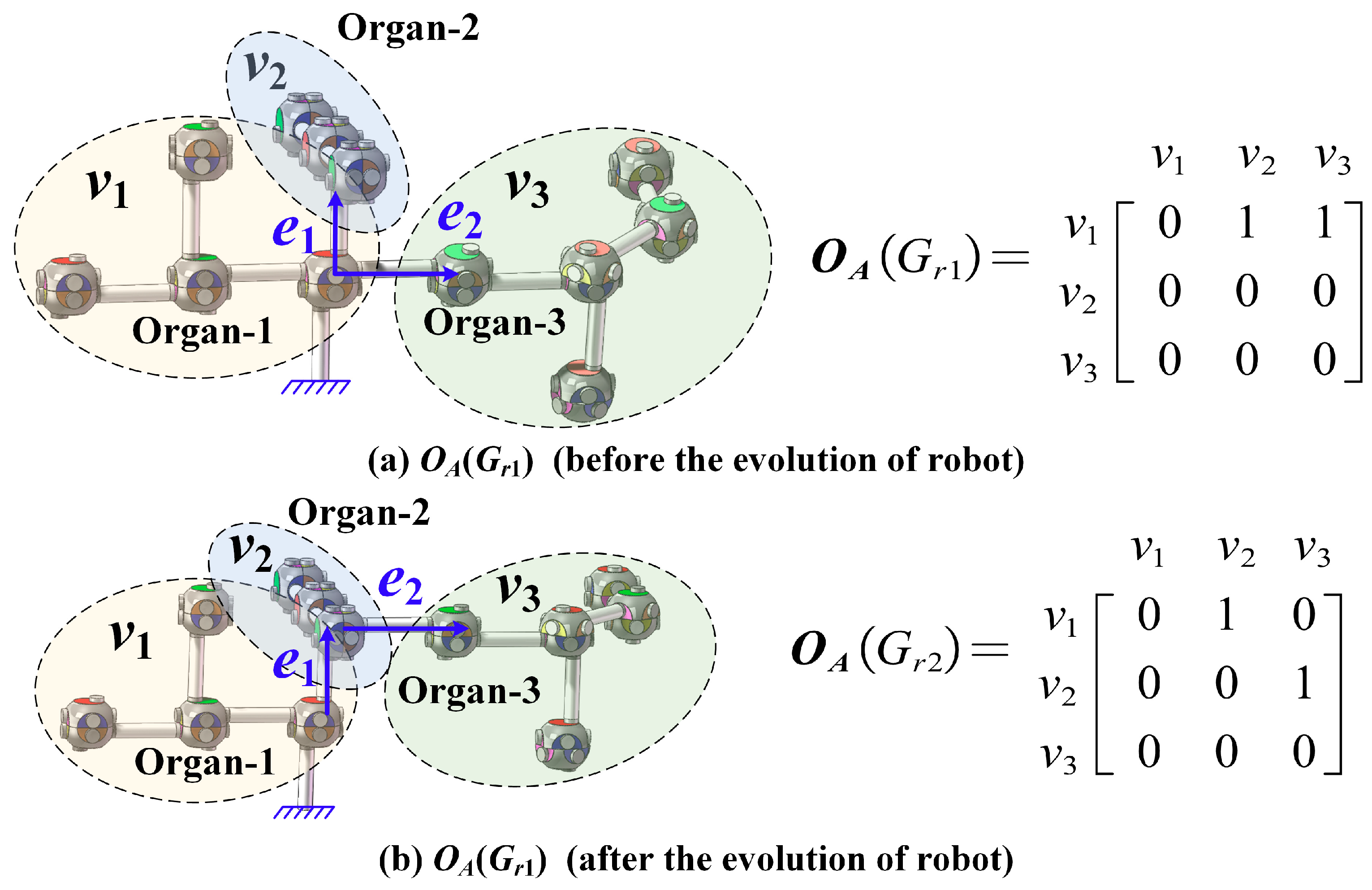
3.2. CSR Multi-Level Assembly Representation
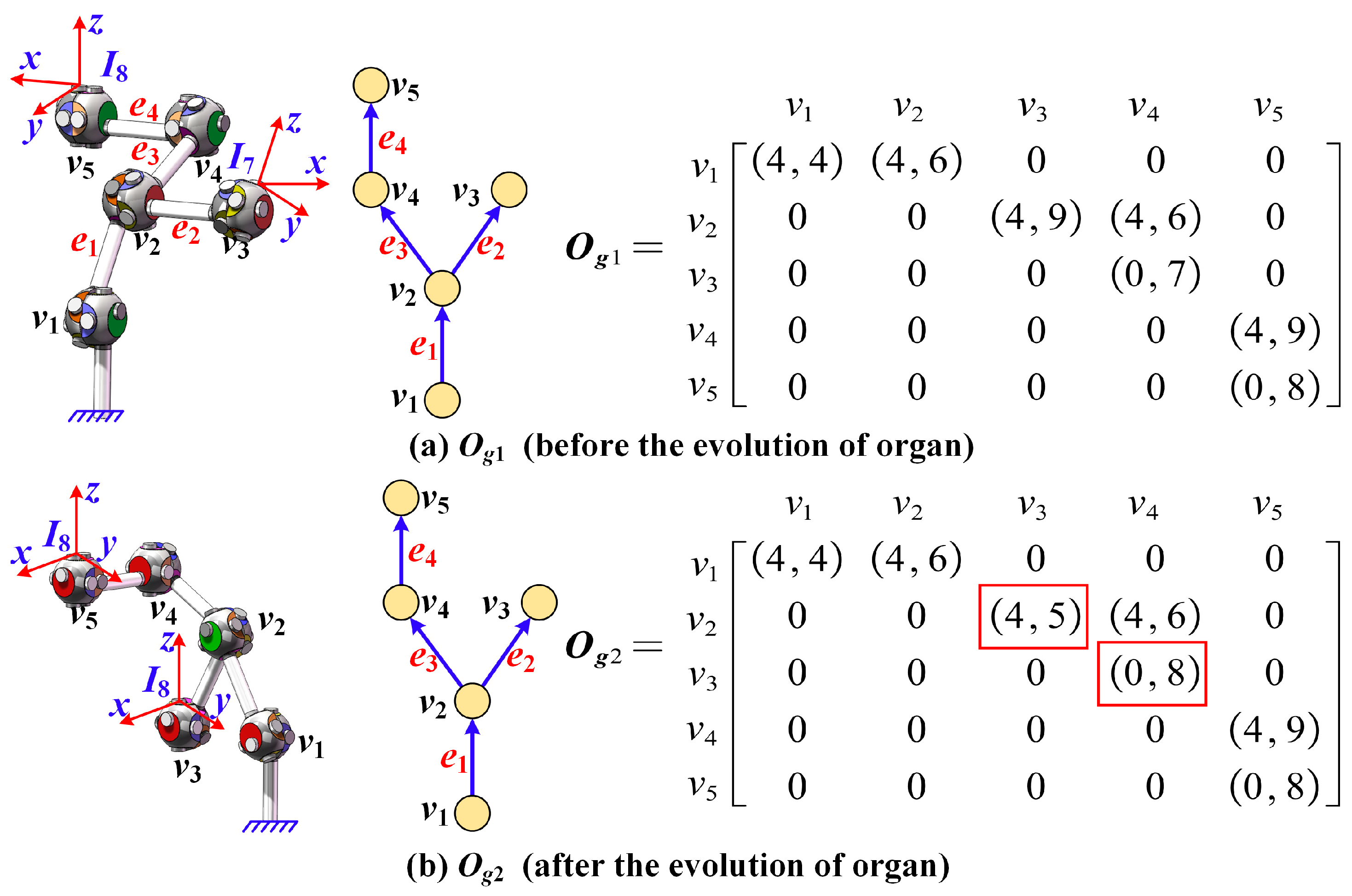
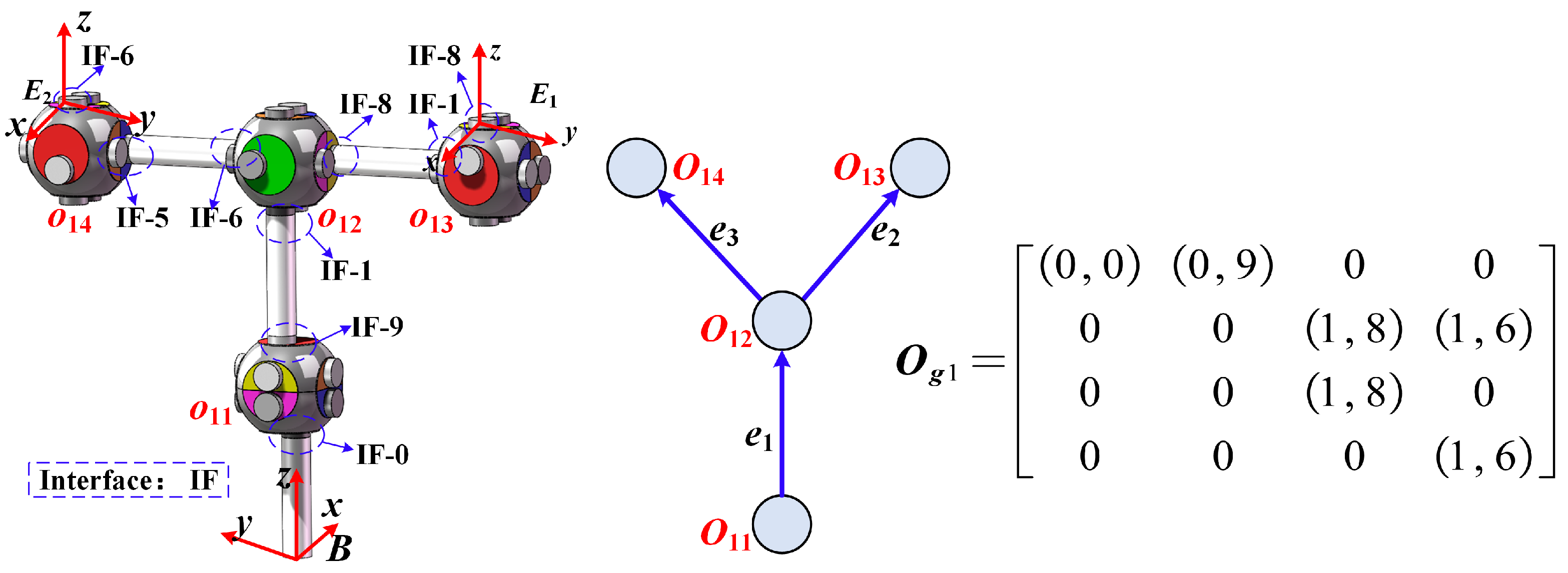
- 1.
- The is used to denote the entry of the CSR’s organ assembly matrix, the represents the assembly relationship of module- when the CSR’s module- points to module- along the directed-graph pathway;
- 2.
- , where k, l are the input and output interfaces of the CSR module-i respectively;
- 3.
- When is the starting point of the directed graph path, there is , and the represents the CSR module assembled and connected to the base by using interface-; when is the ending point of the directed graph path , there is holds and represents the external output motion of the CSR’s module-i using interface-l.
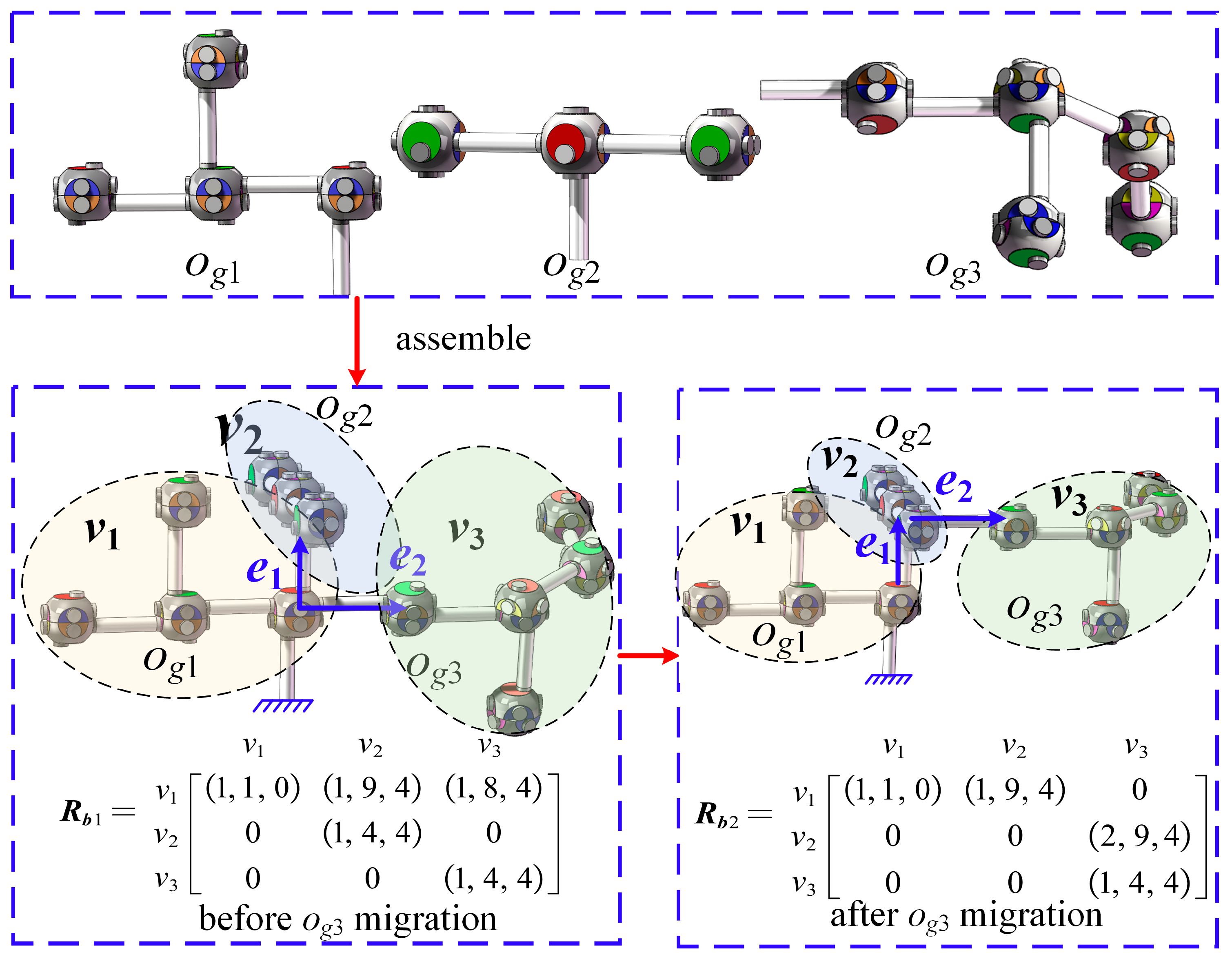
- 1.
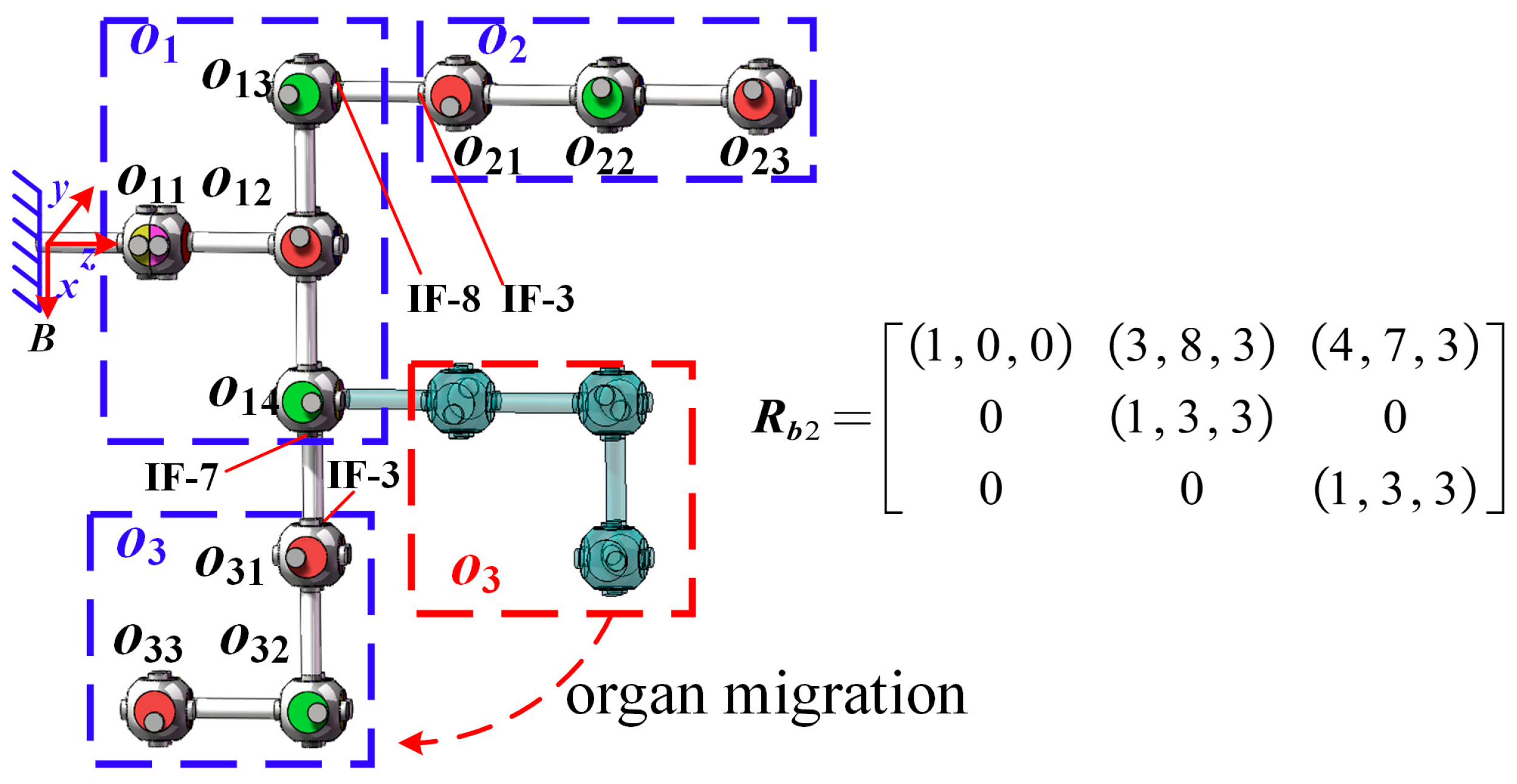
- The is used to denote the entry of the CSR’s robot assembly matrix , the represents the assembly relationship of organ-i when the CSR organ- points to organ-j along the directed graph pathway;
- 2.
- , where k denotes that the CSR’s organ-i is connected to organ-j by using the module-k, the l denotes that organ-i uses the interface-l for external output, and m denotes that the organ-j is connected to organ-i using the interface-m of the module-1;
- 3.
- When is the endpoint of the path in the directed graph of the robot level, the conditions and hold, representing that the module- of the CSR’s organ-i uses interface-m to output motion externally.
4. Multilevel Kinematic Modeling of CSR
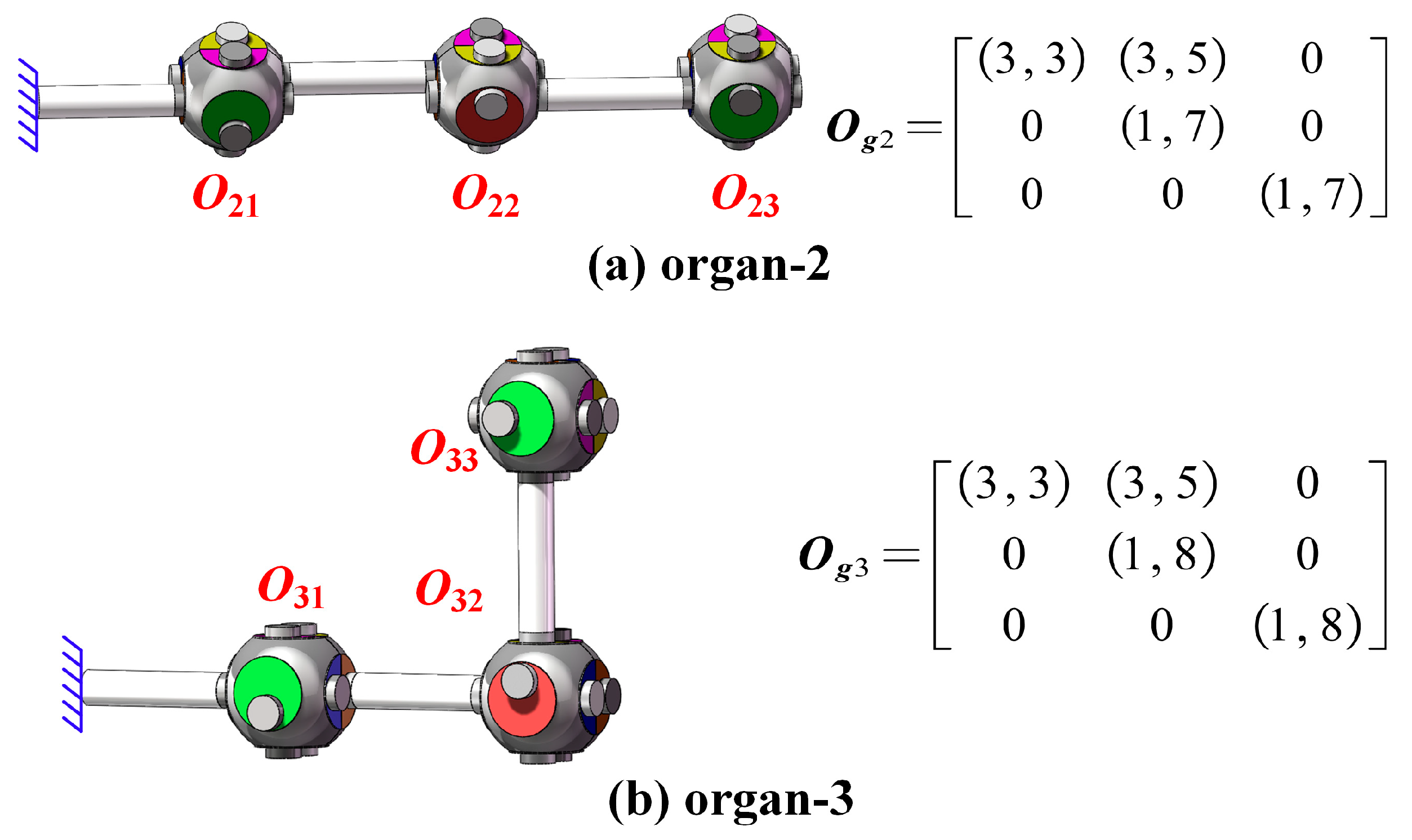
4.1. Organ-Level Kinematic Model
| Algorithm 1: Calculate the path matrix |
| Input: The topological-directed graph of the robot Output: Pathway matrix for topological organization
|
| Algorithm 2: Kinematic algorithms for CSR organ |
| Input: The organ assembly matrix , the rotation angle of modules ; Output: The pose of the output interface coordinate system of the end-of-organ module relative to the base coordinate system , ; Matrix of the output coordinate system of the modules of the organ, .
|
4.2. Robot-Level Kinematic Model
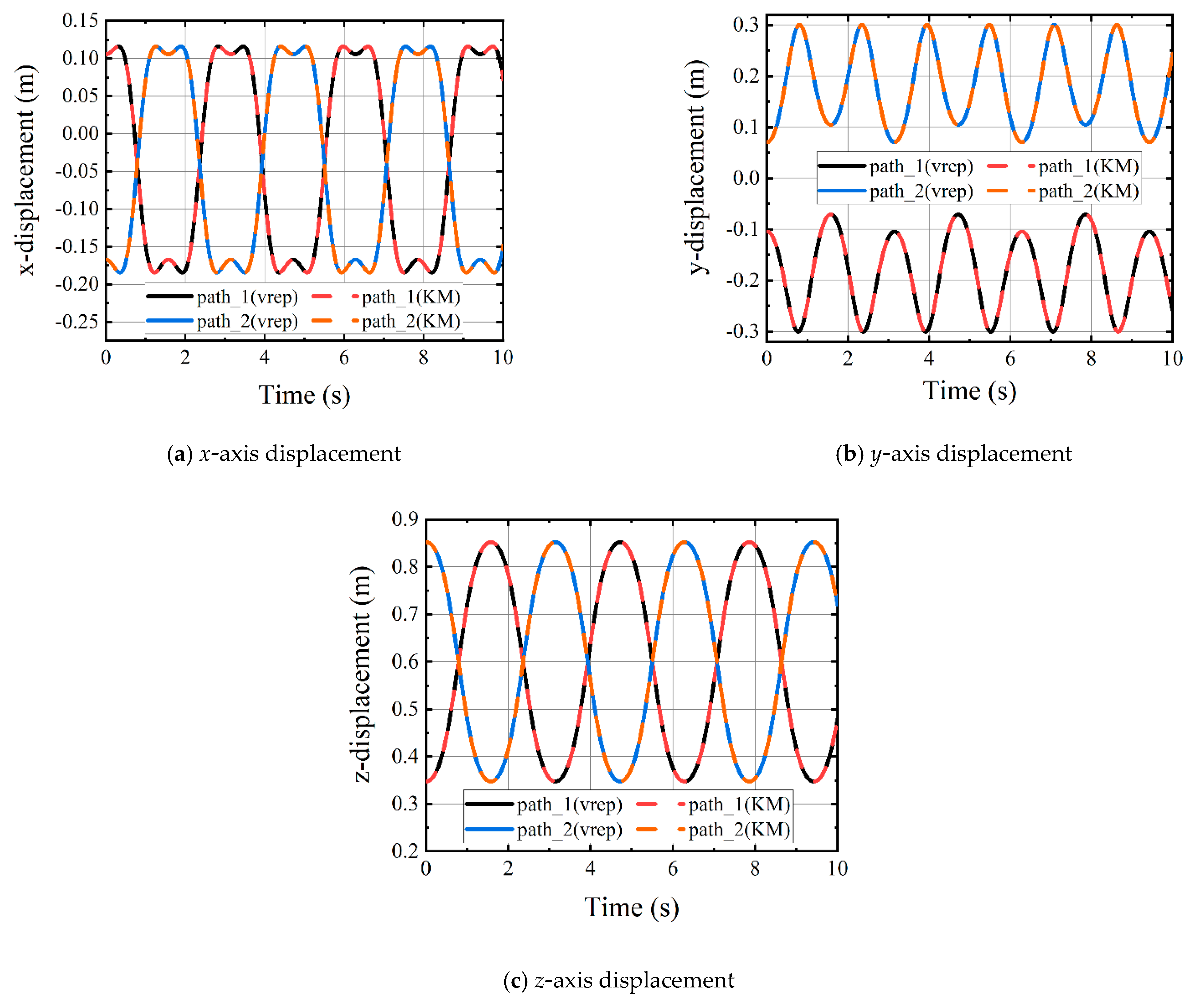
5. Simulation Verification
5.1. Verification of Organ-Level Kinematic Algorithm
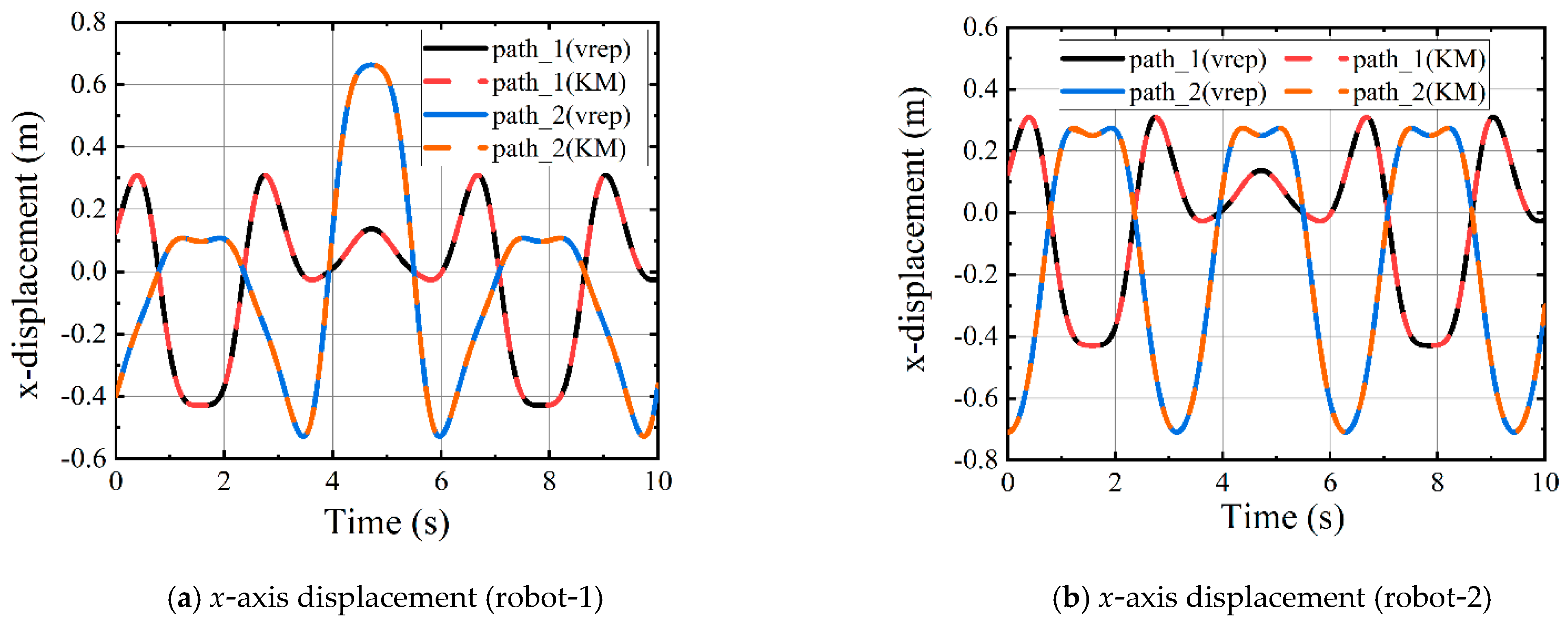
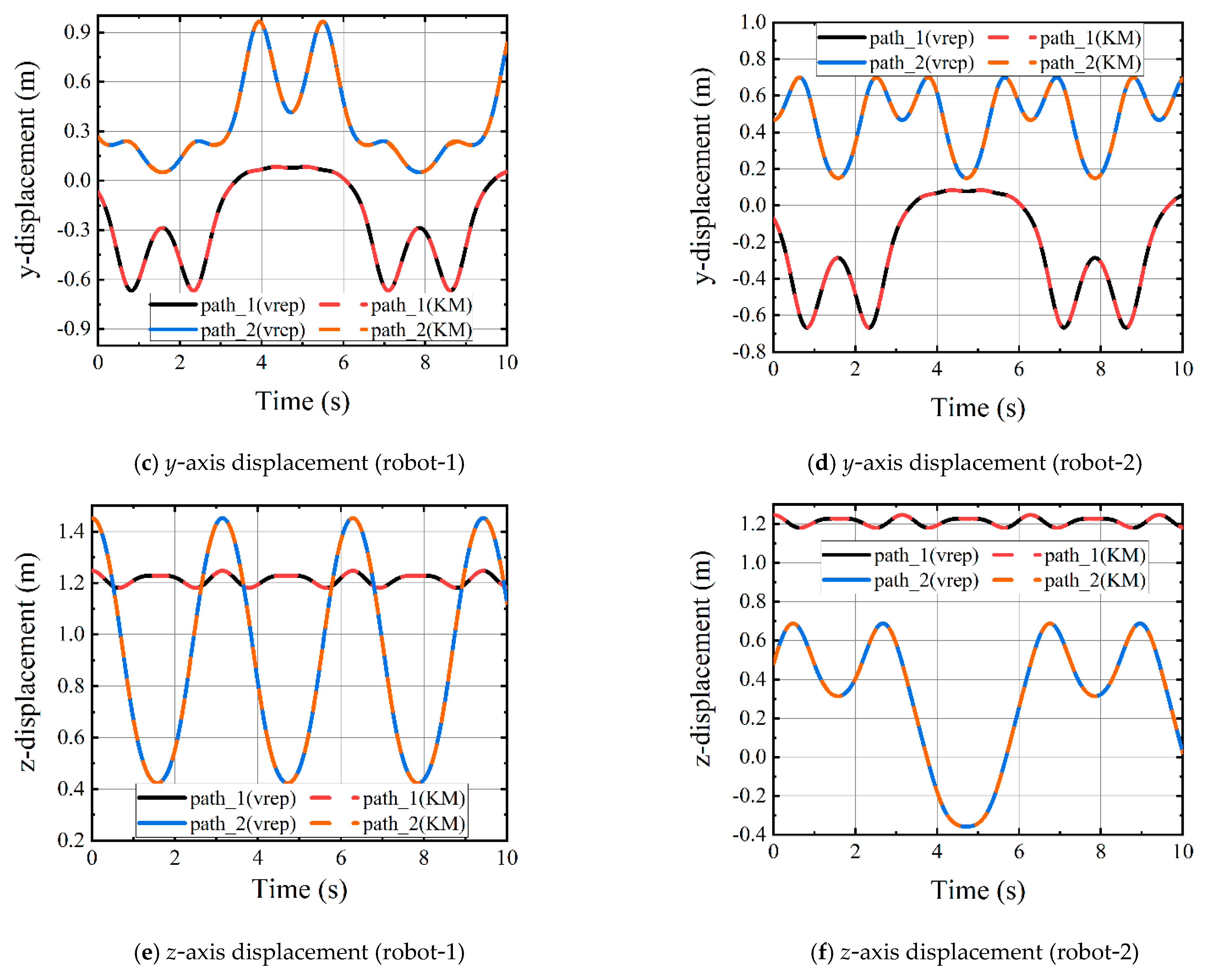
5.2. Verification of Robot-Level Kinematic Algorithm
| Algorithm 3: Kinematic algorithms for CSR robot |
|
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Li, W.-J.; Cheng, D.-Y.; Liu, X.-G.; Wang, Y.-B.; Shi, W.-H.; Tang, Z.-X.; Gao, F.; Zeng, F.-M.; Chai, H.-Y.; Luo, W.-B.; et al. On-orbit service (OOS) of spacecraft: A review of engineering developments. Prog. Aerosp. Sci. 2019, 108, 32–120. [Google Scholar] [CrossRef]
- Qiu, H. Review of deployable sar antenna structures of spacecraft. J. Astronaut. 2021, 42, 1197. [Google Scholar]
- Ding, X.; Wang, Y.; Wang, Y.; Xu, K. A review of structures, verification, and calibration technologies of space robotic systems for on-orbit servicing. Sci. China Technol. Sci. 2021, 64, 462–480. [Google Scholar] [CrossRef]
- Gao, L.; Cordova, G.; Danielson, C.; Fierro, R. Autonomous Multi-Robot Servicing for Spacecraft Operation Extension. In Proceedings of the 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Michigan, MI, USA, 1–5 October 2023; pp. 10729–10735. [Google Scholar]
- Flores-Abad, A.; Ma, O.; Pham, K.; Ulrich, S. A review of space robotics technologies for on-orbit servicing. Prog. Aerosp. Sci. 2014, 68, 1–26. [Google Scholar] [CrossRef]
- Chang, H.; Huang, P.; Wang, M.; Meng, Z. Distributed control allocation for cellular space robots in takeover control. Acta Aeronaut. Astronaut. Sin. 2016, 37, 2864–2873. [Google Scholar] [CrossRef]
- Zhao, H.; Zhao, Y.; Tian, H.; An, D.X. Key Techniques and Applications of Space Cellular Robotic System. J. Astronaut. 2018, 39, 1071–1080. [Google Scholar] [CrossRef]
- Ding, H. Uniform Topological Representation Model of Planar Mechanisms and Isomorphism Identification. Chin. J. Mech. Eng. 2009, 45, 99–103. [Google Scholar] [CrossRef]
- Chu, J.; Zou, Y. An algorithm for structural synthesis of planar simple and multiple joint kinematic chains. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2013, 228, 2178–2192. [Google Scholar] [CrossRef]
- Dong, K.; Li, D.; Kong, X. Representation of planar kinematic chains with multiple joints based on a modified graph and isomorphism identification. Mech. Mach. Theory 2022, 172, 104793. [Google Scholar] [CrossRef]
- Eldershaw, C.; Yim, M.H.; Duff, D.; Roufas, K.; Zhang, Y. Robotics for Future Land Warfare: Modular Self Reconfigurable Robots. In Seminar and Workshop, Defence Science Technology Organisation, Engineering; Environmental Science: Adelaide, Australia, 2002. [Google Scholar]
- Yim, M.; Roufas, K.; Duff, D.; Zhang, Y.; Eldershaw, C.; Homans, S. Modular Reconfigurable Robots in Space Applications. Auton. Robot. 2003, 14, 225–237. [Google Scholar] [CrossRef]
- Paredis, C.J.J.; Brown, H.B.; Khosla, P.K. A rapidly deployable manipulator system. In Proceedings of the IEEE International Conference on Robotics and Automation, Minneapolis, MN, USA, 22–28 April 1996; Volume 1432, pp. 1434–1439. [Google Scholar]
- Acaccia, G.; Bruzzone, L.; Razzoli, R. A modular robotic system for industrial applications. Assem. Autom. 2008, 28, 151–162. [Google Scholar] [CrossRef]
- Jie, Z.; Xindan, C.; Yanhe, Z.; Shufeng, T. A new self-reconfigurable modular robotic system UBot: Multi-mode locomotion and self-reconfiguration. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 1020–1025. [Google Scholar]
- Zhao, J.; Cui, X.; Zhu, Y.; Tang, S. UBot: A new reconfigurable modular robotic system with multimode locomotion ability. Ind. Robot Int. J. 2012, 39, 178–190. [Google Scholar] [CrossRef]
- Zhu, Y.; Zhao, J.; Cui, X.; Wang, X.; Tang, S.; Zhang, X.; Yin, J. Design and implementation of UBot: A modular Self-Reconfigurable Robot. In Proceedings of the 2013 IEEE International Conference on Mechatronics and Automation, Takamatsu, Kagawa, Japan, 4–7 August 2013; pp. 1217–1222. [Google Scholar]
- Liu, C.; Yim, M. Configuration Recognition with Distributed Information for Modular Robots. In Robotics Research; Springer International Publishing: Cham, Switzerland, 2020; pp. 967–983. [Google Scholar]
- Liu, C.; Lin, Q.; Kim, H.; Yim, M. SMORES-EP, a modular robot with parallel self-assembly. Auton. Robot. 2023, 47, 211–228. [Google Scholar] [CrossRef]
- Chen, I.M.; Guilin, Y. Configuration independent kinematics for modular robots. In Proceedings of the IEEE International Conference on Robotics and Automation, Minneapolis, MN, USA, 22–28 April 1996; Volume 1442, pp. 1440–1445. [Google Scholar]
- Hou, F.; Shen, W.-M. Graph-based optimal reconfiguration planning for self-reconfigurable robots. Robot. Auton. Syst. 2014, 62, 1047–1059. [Google Scholar] [CrossRef]
- Zhao, J.; Tang, S.F.; Zhu, Y.; Xindan, C. Topological description method of UBot self-reconfigurable robot. J. Harbin Instit. Tech. 2011, 43, 46–49+55. [Google Scholar]
- Thakker, R.; Kamat, A.; Bharambe, S.; Chiddarwar, S.; Bhurchandi, K.M. ReBiS-Reconfigurable Bipedal Snake robot. In Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, Illinois, IL, USA, 14–18 September 2014; pp. 309–314. [Google Scholar]
- Bi, Z.M.; Gruver, W.A.; Zhang, W.J.; Lang, S.Y.T. Automated modeling of modular robotic configurations. Robot. Auton. Syst. 2006, 54, 1015–1025. [Google Scholar] [CrossRef]
- Li, Y.; Zhu, S.; Wang, Z.; Zhang, L.M.; Ma, X.; Cui, Z. The Kinematics Analysis of a Novel Self-Reconfigurable Modular Robot Based on Screw Theory. DEStech Trans. Eng. Technol. Res. 2017. [Google Scholar] [CrossRef] [PubMed]
- Kelmar, L.; Khosla, P.K. Automatic generation of kinematics for a reconfigurable modular manipulator system. In Proceedings of the 1988 IEEE International Conference on Robotics and Automation, Philadelphia, PA, USA, 24–29 April 1988; Volume 662, pp. 663–668. [Google Scholar]
- You, B. Gait Analysis of Cellular Space Robot for On Orbit Climbing Truss# br. J. Astronaut. 2020, 41, 521. [Google Scholar]
- Liu, X.; You, B.; Wang, R.; Zhao, Y.; Wei, C.; An, D. Multi-Branch Cellular Space Robot Mechanism Design and Climbing Behavior Research. J. Mech. Robot. 2023, 15, 051016. [Google Scholar] [CrossRef]
- Pan, X.; Wang, H.; Jiang, Y.; Xiao, J. Automatic kinematic modelling of a modular reconfigurable robot. Trans. Inst. Meas. Control 2012, 35, 922–932. [Google Scholar] [CrossRef]
- Zhang, T.; Du, Q.; Yang, G.; Wang, C.; Chen, C.; Zhang, C.; Chen, S.; Fang, Z. Assembly Configuration Representation and Kinematic Modeling for Modular Reconfigurable Robots Based on Graph Theory. Symmetry 2022, 14, 433. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Row | Value |
|---|---|
| 1 | |
| 2 | |
| 3 | |
| 4 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, X.; Gu, H.; Zhang, X.; Duan, J.; Liu, Z.; Li, Z.; Wang, S.; You, B. Multi-Level Behavioral Mechanisms and Kinematic Modeling Research of Cellular Space Robot. Machines 2024, 12, 598. https://doi.org/10.3390/machines12090598
Liu X, Gu H, Zhang X, Duan J, Liu Z, Li Z, Wang S, You B. Multi-Level Behavioral Mechanisms and Kinematic Modeling Research of Cellular Space Robot. Machines. 2024; 12(9):598. https://doi.org/10.3390/machines12090598
Chicago/Turabian StyleLiu, Xiaomeng, Haiyu Gu, Xiangyu Zhang, Jianyu Duan, Zhaoxu Liu, Zhichao Li, Siyu Wang, and Bindi You. 2024. "Multi-Level Behavioral Mechanisms and Kinematic Modeling Research of Cellular Space Robot" Machines 12, no. 9: 598. https://doi.org/10.3390/machines12090598
APA StyleLiu, X., Gu, H., Zhang, X., Duan, J., Liu, Z., Li, Z., Wang, S., & You, B. (2024). Multi-Level Behavioral Mechanisms and Kinematic Modeling Research of Cellular Space Robot. Machines, 12(9), 598. https://doi.org/10.3390/machines12090598