Abstract
Soft robots present resilient and adaptable systems characterized by deformable bodies inspired by biological systems. In this paper, we comprehensively review existing design methods for soft robots. One unique feature of our review is that we first formulate criteria, which enables us to derive knowledge gaps and suggest future research directions to close these gaps and go further. Another distinctive feature of our review is that we pivot on the general engineering design process for soft robots. As such, we consider three criteria: (1) the availability of design requirements to start with the design of soft robots, (2) the availability of the so-called concept design or architecture design for soft robots, and (3) the systematic process that leads to the final design of soft robots. The review is conducted systematically, especially when searching for and selecting relevant publications in the literature. The main contribution of this review includes (i) identifying knowledge gaps and (ii) suggesting future research directions to close these gaps and go further.
1. Introduction
An autonomous robot has five functional units or systems, namely: (i) a power generator and supply, (ii) an actuator, (iii) a mechanism (or motion and force transfer) [1], (iv) a sensor, and (v) a controller. A non-autonomous robot excludes the system (i), while a machine only has the systems (ii) and (iii). In a traditional robot, all the units are composed of “rigid” body materials. By rigid, it is meant that the deformation is small, a disturbing factor only. The units do not interfere with each other structurally by the deformation of body materials. The limitations of such robots (rigid body robots) include (a) the hostility of a robot’s environment, (b) poor resilience, and (c) poor adaptability.
The soft robot concept has been proposed to overcome the limitations of rigid body robots [2]. Soft robots are composed of body materials whose Young’s modulus is close to that of materials made for animal bodies, including the human body [2]. It is noted that in soft robots, deformation of materials and bodies participate in active roles in all the functional units or sub-systems of the robot. As such, all the functional sub-systems are integral, interacting with each other by their body deformations and this view sets the definition of soft robots in [2], and significantly departure from others in [3,4,5]. Due to the foregoing feature, soft robots have many salient properties, such as high resilience and delicacy, as opposed to rigid body robots. Care must be taken that our review only concerns soft machines, parts of soft robots which consist of actuators and mechanisms, rather than the entire robot. Further, this paper focuses on design methods for soft machines. Nevertheless, hereafter, we may still use the term “soft robot” instead of “soft machine”, as in the title of this paper, to maintain consistency with most of the current publications in the literature.
Soft robots positively impact various fields, including healthcare, education, social warfare, and safety. In healthcare, soft robots are used in health monitoring, medical treatment, and assistive devices for people with disabilities [6,7,8,9,10,11,12,13,14]. They are used in prosthetic systems; specifically, the soft prosthetic hand is shown to significantly enhance the quality of life for individuals [12]. In education, soft robots provide a straightforward and cost-effective introduction to understanding robots. According to [15], students can quickly program their custom-designed robots, making soft robots a valuable tool for increasing educational accessibility. In safety and security, soft robots are vital in pipe inspection and maintenance, where they help prevent economic losses and casualties by detecting and addressing fluid leaks in damaged pipes [16,17]. In sustainability, soft robots contribute to combating climate change through adaptation, restoration, and remediation efforts [18]. Research into the design methods for soft robots is thus essential to boosting more practical applications of soft robot technology. As a rule of thumb, the design, especially the concept design, is responsible for about 80% of the total cost of a product [19].
Motivated by the above understanding of the importance of the design methods for soft robots, this paper will review the current design methods for soft robots, aiming to identify knowledge and technology gaps and suggest future research and development opportunities. Based on our approach to conducting a critical literature review, reported in [20,21], in this review, we will first develop the criteria with which we will evaluate the literature. In this connection, we introduce the general engineering design process because the subject we review is the design method for soft robots. It is noted that the so-called general design process applies to all devices, products, or systems as opposed to specific design processes applicable to specific devices, products or systems only [22].
The well-known engineering design process is developed by Pahl and Beitz [23]. The revised version of this process is described in [24] and shown in Figure 1. According to Figure 1, the first step (design requirement) in design is to convert the customer voice of needs for a product, say soft robots, into the technical description of needs, i.e., the description of needs in technical terms and with specific metrics. For instance, a customer needs a durable product; this need is written into a technical specification with parameters such as hardness and lifetime. The technical description of needs is also called the technical specification of needs or the design requirements or requirements. Hereafter, these terms are used interchangeably. The first step also includes the decomposition of the requirement, namely from the overall requirement into sub-requirements, and so forth. The second step is the concept design, which determines the working principle for a soft robot under design. For instance, suppose that the requirement is to convert rotation to translation, and the working principle or the concept of the device under design is the slider-crank, screw mechanism, and rack-and-pinon [25]. The design iterates these steps and results in the requirement decomposition (R1, R2, ……, Rn) along with the device concepts (C1, C2, ……, Cn) to meet the design requirements (R1, R2, …, Rn), where R: requirement, and C: concept. It is noted that the result of the concept design of a product is also called the architecture of a product [26], and further required decomposition and concept design may be carried out in a concurrent zig-zag manner. The third step (embodiment design) in design is to determine the shape, size, and material of components, along with the assembly of the components. The last step (detail design) in design is to determine the surface features of the components.

Figure 1.
The engineering design process proposed by Pahl and Beitz [23].
Based on the general design process discussed above, the following criteria are defined as a reference to evaluate various design methods for soft robots in the literature and help to derive knowledge and technology gaps, which are presented below.
- The first criterion (Cr1): A design method that represents the design requirement for a soft robot as completely and explicitly as possible. By “completely”, it means that all three categories of requirements, namely function, performance, and condition, can be included [27]. By explicitly, it means that the design requirement can be expressed in an object model or schematic model rather than in a specific computational model, e.g., finite element model.
- The second criterion (Cr2): A design method that allows for creating the architecture or the concept of a soft robot as rationally as possible. By “rationally”, it means that the concept is created based on first principles.
- The third criterion (Cr3): A design method that allows for creating the final design as systematically as possible. By “Systematically”, it means that the design process follows the four steps outlined above (adapted from the one in [23]), which may also be called a white-box rather than a black-box process [28].
Several remarks are made regarding the three criteria. Remark 1: Cr1 is defined because the essence of design is to propose a structure that meets a requirement, and therefore, the requirement is the first and foremost step in design. Remark 2: Cr2 is defined because the architecture of a product is as important as the DNA of a biological system and empirically; in the engineering design committee, there is a broad agreement among researchers, though empirically, about 80% of the total cost of a product is decided at the concept design phase, see [19,29]. Care must be taken to ensure that no criterion is defined in the embodiment design phase or the detail design phase because the impact of the design from these two design phases is relatively low compared to that of the design from the concept design phase. Moreover, in the modular architecture of a product [30], the three design phases are combined into one physically. In this case, the concept design, the kinematic design of machine products, dominates among the three design phases. Remark 3: Cr3 is defined because in the design community, in a new product design, three design phases (concept, embodiment, and detail) are logically distinctive, thus providing more opportunities for design innovation, though empirically, compared to one or two design phases only, see Figure 2.
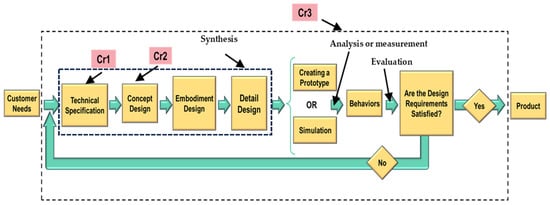
Figure 2.
The criteria versus the general design process. Synthesis: propose the structure of a design object to meet a requirement; analysis: find the behavior for a given structure.
Further, to facilitate the utilization of these criteria, guides are given to rate how well a particular design method meets the criteria, e.g., high, low. These guides are shown in Table 1.

Table 1.
Guides for rating how a particular design method meets the criteria.
The remaining part of the paper is organized as follows: Section 2 will describe how the literature on design methods for soft robots is searched and selected. Section 3 will provide a comprehensive discussion of the literature regarding design methods for soft robots, aiming to derive knowledge and technology gaps. Finally, Section 4 will suggest future research opportunities to close the knowledge gaps and advance the design methods for soft robots.
2. Searching and Selecting Papers: A Systematic Approach
The systematic approach to literature review involves the following steps: (i) starting by selecting target databases that contain literature on the subject concerned, designing methods for soft robots in the case of the present paper, (ii) choosing keywords that best represent the subject concerned, (iii) identifying relevant literature from the outcome of searching the databases, and (iv) analyzing the identified literature along with the over-all search outcome. Each step will be discussed in the following sub-sections.
2.1. Target Databases
A rapid search on Scopus, the largest and most reputable abstract and citation database, is performed to pinpoint the most pertinent databases for the design of soft robots. This search, conducted using the keyword ‘soft robot’ from 2010 to 2023, yielded over 16,000 results. Subsequently, the top ten journals with the greatest number of publications about soft robotics were identified, as shown in Figure 3.

Figure 3.
The contributions of different journals in soft robotics (based on Scopus).
The significant contributions from these journals underscore their pivotal role in shaping the research landscape in soft robotics, making them prime sources for a comprehensive review of the latest advancements and innovations in the field. Notably, IEEE publications comprise about 39% of the results, spanning various document types, such as articles, conference papers, and chapter books. This underscores the substantial influence of the IEEE database in soft robotics research. Furthermore, the Journal of Soft Robotics holds the second rank, contributing 12% of the publications related to soft robots. Since 2014, the Journal of Soft Robotics (SoRo) has been at the forefront of publishing advanced research in this field. By concentrating on these two databases, IEEEXplore® and Soft Robotics (Mary Ann Liebert Inc., Larchmont, NY, USA), the review is grounded in the latest and topically significant works available in soft robotics.
2.2. Keywords Selection
The main goal of this step is to find publications in the literature based on the criteria (see the discussion in Section 1), specifically, the design method, architecture, actuation, and mathematical model for soft robots. As such, the selected keywords are:
- AND—Soft robot; Design.
- OR—Architecture; Actuator; Mathematical Model; Body; Mechanism.
When conducting a systematic literature review, adding ‘AND’ to the search keywords helps focus results by ensuring that every chosen study contains all the required keywords (i.e., ‘Soft robot’ and ‘Design’). Conversely, selecting ‘OR’ broadens the scope of the search and makes any of the input terms appear in the results; for instance, the operator ‘OR’ subjects to the keywords ‘Architecture’, ‘Actuator’, ‘Mathematical Model’, ‘Body’, and ‘Mechanism’.
2.3. Identification of Relevant Publications
The search for relevant publications is conducted by applying the keywords search and date range filter from 2010 to 2023 to the IEEEXplore® and SoRo journals. The primary criterion for selecting the relevant literature was the results that contained the keywords and aligned with the defined criteria in Section 1. To ensure the selection of the most relevant publications, the abstracts of all results that meet the criteria were studied. After applying the selection criteria to the initial results, we selected 198 relevant publications from IEEEXplore® and 124 from SoRo for this review. Figure 4 illustrates the chosen publications according to the years of their publication.
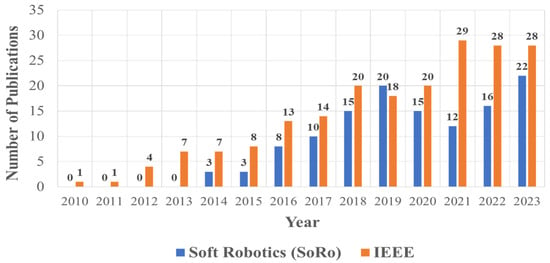
Figure 4.
Evolution of publications over time: a chronological analysis.
Though our review is focused on soft machines (actuators and mechanisms), we hope to have some impression of the literature on the soft sensor and the soft controller instead of the soft actuator. For this reason, we conducted three separate searches using the keywords “soft robot” alongside “actuator”, “sensor”, and “control”, respectively. We then sorted the publications related to actuators, sensors, and controllers for soft robots by the year of publication, see Figure 5. It can be seen in Figure 5 that first, the number of publications increased from 2010 to 2023, suggesting growing interest in the functional units of soft robots; second, the attention to the soft actuator was far more than the attention to the soft controller and soft sensor with the soft sensor having received the least attention. We speculate two reasons behind this phenomenon. The first reason is that the understanding of the soft sensor, as well as the soft controller, may present some significant confusion. According to [2], a common understanding is that they are conventional but associated with the soft mechanism only. This understanding is argued incorrectly in [2], but details of the argument are out of the scope of the present paper and are referred to in [2]. No unified understanding of the soft sensor and the soft actuator naturally causes less attention to them. The second reason is that the soft robot differs from the rigid robot mainly in the machine (i.e., integration of the actuator and the mechanism), and this view is congruent with the conventional understanding of the soft sensor and soft controller. This view is a contributory factor to the phenomenon.

Figure 5.
The number of publications on soft robots from 2010 to 2023, categorized by soft subsystems: actuators, sensors, and controllers. Note: The publications in this figure are selected solely based on the considered keywords.
3. Results and Discussion
In this section, we analyze and comment on the literature as searched. It is to be noted that a design process includes not only the activity of synthesis but also the activity of analysis, and specifically, the analysis activity assists in the evaluation of design candidates out of each design phase. Further, in both activities of analysis and synthesis, we focused on the so-called computational approach, which includes (1) mathematical modelling of a design object under design, soft robots in this case, to establish the mathematical model for the design object, (2) model-based algorithms for analysis, and (3) model-based algorithms for synthesis. Hereafter, in this paper, synthesis and design are used interchangeably, though the term ‘design’ is broader than ‘synthesis’, covering all activities in the entire design process, which results in a final design object to meet the requirement. As such, this section is organized in the following manner. Section 3.1 discusses the method of design (or synthesis). Section 3.2 focuses on analysis methods, the basic components that build up a soft robot, actuation methods for soft robots, and mathematical modelling for soft robots. Section 3.3 outlines knowledge and technology gaps in the design and analysis method of soft robots.
3.1. Design Methods
In this section, we present a detailed analysis of design methods for soft robots in the literature. First, we conclude three categories of design methods in the literature, that is (1) the method based on learning creatures and animals (bio-inspired method), (2) the method based on the topology optimization technique (topology optimization method), and (3) the method based on the evolutionary computing technique (evolutionary computation method). Second, we examine the three categories of methods against the criteria defined above, specifically by rating them against the criteria based on Table 1, to explore their gaps by considering the benchmark rate (‘High’) as the reference. We also give narratives to these gaps. It is to be noted that the rates (thus the gaps) imply limitations or restrictions of these design methods, and in the Section 5 of this paper, future directions are proposed to close these gaps and go further.
3.1.1. Bio-Inspired Design Methods
The bio-inspired design method, like its name, is to build soft robots that resemble creatures and animals. Surprisingly, out of all the relevant publications (198 from IEEEXplore® and 124 from SoRo, as shown in Figure 4), 169 publications focus on design methods and have been selected for this category. Figure 6 shows the distribution of the publications according to the year of their publication. The period from 2010 to 2023 witnessed an increase in the design of soft robots, particularly those that resemble animals or biological organs. Among creatures and animals, worms, humans, jellyfish, starfish, snakes, elephant trunks, octopuses, and fish have emerged as the most popular sources of inspiration for researchers creating soft robots [33,34,35,36,37,38,39,40,41,42,43,44,45,46,47,48,49,50,51,52].

Figure 6.
Soft robots designed by mimicking animals and humans.
Figure 7 categorizes the soft robots designed to resemble these animals.

Figure 7.
Soft robots that look like biological creatures.
The popularity of the bio-inspired design method is perhaps due to its simplicity in the design process, specifically, no or less need for effort in the concept design (i.e., proposing an architecture for a soft robot under design), as the architecture of a soft robot is replicated from a creature. The bio-inspired design aligns with the so-called bottom-up design approach. In this approach, a designer starts with an attempt to understand the principle (i.e., physics, chemistry, mechanics, etc.) which governs a special property or behavior of the creature interested in by the designer per se, by observing that creature, then “replicates” the biological structure of that creature, based on the perceived governing principle, by use of materials and building blocks, and finally refines the structure of the engineered counterpart of that creature to achieve the most similar property or behavior of that creature.
We shall categorize the particular property or behavior of the creature or animal and the governing principle researchers replicate in soft robots in the literature.
- Deformability: Creatures such as octopuses, worms, and caterpillars have flexible bodies with bending, stretching, and twisting abilities. This remarkable flexibility empowers them to adjust and navigate their surroundings; for instance, octopuses can bend their arms to catch prey and effortlessly squeeze them. By replicating these creatures, soft robots are built to possess such flexible and adaptive properties and behaviors [53,54,55]. The governing principle behind this is the deformability of the structure, including both elastic and plastic deformation.
- Elasticity: Many animals, e.g., worms and caterpillars, can stretch their bodies beyond their normal length and return to their original shape. Soft robots that replicate this property can be found in [56,57]. The governing principle for such a behavior is the elasticity of the material.
- Variable-stiffness structure: Creatures such as starfish and worms possess distinctive structures capable of transitioning from soft to hard and vice versa, a phenomenon known as variable-stiffness structure. The variable stiffness property enables these creatures to adjust the stiffness of their body dynamically in response to changes in their environment and potential threats. Soft robots built by replicating the variable-structure property are referred to in [58,59,60]. The governing principle for the variable stiffness is that stiffness is a property of the structure, and a change in the structure will cause a change in the stiffness of the structure.
- Self-healing: Creatures such as starfish and salamanders can regenerate lost body parts, a phenomenon called resilience [61,62,63,64,65]. Soft robots built by replicating these creatures are referred to in [66,67]. The underlying governing principle is the self-repair or self-healing of the structure, the microstructure of the materials.
An example of a soft robot, designed with the bio-inspired design method, is the soft gripper inspired by octopus arms, which can grip objects of various shapes and sizes, making them ideal for delicate tasks in the food industry [65,66,67,68], see Figure 8a. Another example of a soft robot, designed with the bio-inspired design method, is the soft robot replicating worms and caterpillars for locomotion, see Figure 8b. The robot can navigate through confined and complex environments, which is particularly useful for medical applications such as minimally invasive surgeries and endoscopy, where precise and gentle movement is essential [69,70,71,72,73,74,75,76,77,78,79].

Figure 8.
Bio-inspired soft robot designs for diverse applications [80] (a) Soft gripper with octopus-like arms for grasping objects; (b) Worm-inspired soft robot with a segmented body for crawling. These robots are made of flexible and soft silicone materials. There are two main fabrication methods: casting, which involves producing a mold and casting the parts, and 3D printing, which creates the entire system using a 3D printer.
To illustrate the bio-inspired design method process in the context of the general design process, as outlined above, as well as the three criteria (Cr1–Cr3) defined above, we examine the design process of SomBot. SomBot is a soft robot inspired by Nannosquilla decempinosa, a small stomatopod found along the Pacific coast of Panama [81]. The initial qualitative requirement (customer voice/needs step shown in Figure 1) of this design is to create a soft locomotion robot with efficient movement ability. Note that the requirement is not specific but open-ended. To meet this open-ended requirement, the designer observed that Nannosquilla decempinosa could generate a rolling motion through the curling deformation of its body and consequently, the designer proposed that the potential soft robot should consist of a series of pneumatic chambers to create consecutive dynamic somersaults. Figure 9 outlines the preceding design process along with information on the structure of the soft robot with the so-called suction chamber, which serves as an actuator and mechanism.

Figure 9.
The process of the bio-inspired method to design a soft robot [81]. This soft robot is made of silicone material and fabricated using casting. The design integrates the body subsystem with the actuator subsystem. The body contains air chambers, which create vacuum and suction effects.
Regarding Cr1, in the above design process (or, in fact, in a bio-inspired design methodology), there is no step to determine technical requirements based on customer needs before the design starts. Indeed, in the illustrated example, parameters like velocity and acceleration associated with the efficient movement ability of the soft robot under design are not defined. The essence of the bio-inspired design method lies in its natural alignment with the bottom-up approach. Here, designers observe creatures’ unique characteristics, replicate their structures, and explore practical applications. Therefore, Cr1 is not available for bio-inspired design methods, thus, this method receives a low rating against Cr1.
Regarding Cr2, the designer, using this design method, will search for the principle of a design object from creatures or animals in nature. Although there are many choices of principles, the designer may select a creature that can create a rolling motion through its body deformation, specifically a small stomatopod found along the Pacific coast of Panama to satisfy the locomotion and soft body requirements (the unique architecture of the soft body of the stomatopod can create a rolling motion). As such, the rationale behind creating the architecture of a design object in the bio-inspired design method is more dependent on the observation of the creature in nature than the available principle in physics and chemistry, and the bio-inspired design method receives a low rating against Cr2.
Regarding Cr3, the bio-inspired design method follows a non-systematic process that does not have clear and predefined phases. However, different designers may proceed with the design by following the embodiment and design phases ad hoc. For instance, in the above example, the design process consists of customer needs, observation of creatures or animals, learning biological principles, and proposing an embodiment design in a trial-and-error process. As such, the bio-inspired method in the literature receives a low rating against Cr3.
3.1.2. Topology Optimization Method
The second group of design methods observed in the selected results involve methods based on the so-called topology optimization (TO) [82,83,84,85,86,87,88,89,90,91,92,93,94,95]. TO represents the design problem (especially topology design) as an optimization problem, especially optimizing the distribution of materials within a design domain or space. In brief, the process of conventional TO starts with discretizing the design domain or space into a mesh of elements covering the entire design domain. Depending on the discretization method, users select a physical parameter of the elements as the optimal variable, such as the density of each element. If the value of this variable of an element is small enough, this element will be removed; otherwise, the element remains in the domain. In the end, all the remaining elements together are the resulting design. As such, the optimal variable is a surrogate of the element in terms of its presence or absence. Like any optimization problem, TO has objective and constraint functions. An in-progress design is evaluated by analyzing its behavior against the objective and constraint functions. Therefore, an analysis facility must be available for this evaluation in the TO system. By iteration, the TO will eventually result in an optimal layout of elements or materials [95,96,97,98,99].
The TO method has been used for designing soft robots with the elements of rectangles, blocks, and trusses [100,101,102,103,104,105,106,107]. For example, Zhang et al. [106] developed a Python and ABAQUS/CAE framework using truss elements to craft a pneumatic soft finger for biomedical applications. Similarly, Chen et al. [107] created a restriction layer for the air chamber of a pneumatic soft finger based on rectangular elements. An example of the application of this method for soft robots is used to explore knowledge gaps based on the three criteria (Cr1–Cr3). As shown in Figure 10, the design domain is discretized into cubic-shaped elements, and the density of these elements serves as the design variable [108]. The objective function of the optimization problem is to maximize the output deformation of the system. At the same time, the volume of the final design must not exceed the boundaries of the design domain (the constraint function).

Figure 10.
The design process of a soft gripper through the TO design method [108], embodiment design, and detail design are completed during the TO process phase. Additionally, due to the symmetrical shape of the finger, half of it is considered as the initial design domain.
Regarding Cr1, design requirements may be captured and represented by the boundary condition, input deformation along with force or torque, and output deformation along with force or torque in the TO method. The designer determines the design domain based on experience. However, for soft robots driven by fluids (including gases), interfaces between fluids and solids (gripper body) are not specified in the design requirements. Additionally, the design requirements are represented in a computational model, which incorporates the design variable, objective function, and constraint function. This issue highlights the necessity for optimization expertise in accurately defining the design requirements. While TO does allocate a specific phase for determining design requirements, it does not fully address the unique design requirements specific to soft robots. As a result, TO receives a medium rating against Cr1.
Regarding Cr2, first, the TO method can create a concept design of soft robots, i.e., topology. In this method, the behavior of the systems is governed by the laws of physics, and the output deformation is calculated accordingly. In this example, TO overlooks certain aspects, such as details of the actuators. In the current TO design method for soft robots, the designer must empirically determine the location, size, and type of soft actuators. In other words, the TO design method for soft robots can only partially create a concept design based on the first principle, and the empirical knowledge of the designer is needed with this method. The TO design method for soft robots receives a medium rating against Cr2.
Regarding Cr3, the TO design method for soft robots adheres to a systematic process characterized by a step-by-step flow with clear and distinctive phases. The result of applying the TO design method for soft robots is a “coarse” embodiment design object, which remains to be polished for the envelop of the skeleton. As such, the TO design method for soft robots receives a high rating against Cr3.
3.1.3. Evolutionary Computation Method
The evolutionary computation method draws inspiration from Darwin’s principle of evolutionary biology. According to Darwin’s theory, individuals with advantageous traits that enhance survival and reproduction have more chances to pass on their genes to subsequent generations, see Figure 11. Over time, this process leads to better fitness and adaptation of populations to their environments. The primary application of the evolutionary computation method lies in optimization, where the initial design of the system evolves to fit its environment better; this process involves an iterative process, gradually adapting a population of solutions over generations to obtain an optimum solution. A crucial step of this process is to define the fitness function because it evaluates each possible design and directly influences the selection of solutions based on their performance relative to predefined criteria. Genetic algorithms [109] and neural networks [110,111] are two examples of the evolutionary process.
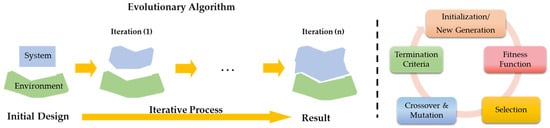
Figure 11.
Evolutionary algorithm: The graph outlines the five essential phases in a genetic algorithm. It begins with the “Initialization”, followed by the “Fitness Function” phase, where solutions are evaluated. The “Selection” phase picks designs (solutions) for reproduction, leading to the Crossover (recombination of traits from two parents) and Mutation phase (introduction of random changes), then applied to the selected designs, generating a new generation with diverse traits. The process iterates for several generations or until a termination condition is met. More information is given in [109].
The evolutionary computation method is used for designing soft robots. The main idea is that a soft robot comprises a set of blocks or modules linked together, resembling a Lego structure [112]. For instance, Lee et al. [113] focused on reducing the time required to build basic soft robots and introduced a set of soft blocks called SoBL. These consist of three soft modules: (1) a pneumatically inflatable soft brick, (2) a flexible bending brick, and (3) a channel brick. A soft robot is formed by assembling these identical blocks. Another example of the evolutionary computation method is the voxel-based soft robot, where the soft robots are created by connecting several deformable blocks named voxels (voxel-based soft robots will be discussed in the next sections). The voxels are categorized into passive and active voxels. Active voxels are actuated by pressurizing and vacuuming. Kriegman et al. [114] provided a comprehensive study on the different combinations of active and passive voxels to create different soft moduli with different behaviors. As a result, different soft robots can be created by connecting these soft modules, such as soft grippers and walker robots [115].
An example of applying the evolutionary computation design method for soft robots [116] is used to explore knowledge gaps based on the three criteria (Cr1–Cr3). In this example, the designers used an evolutionary algorithm to optimize the fundamental block to construct the gripper by connecting the blocks. As shown in Figure 12, the two primary needs of customers are soft bending and pneumatic actuation. In the first step, the designers initiated a block design and subsequently constructed the entire gripper system by connecting these blocks. The list of design requirements for blocks is shown in Figure 12.
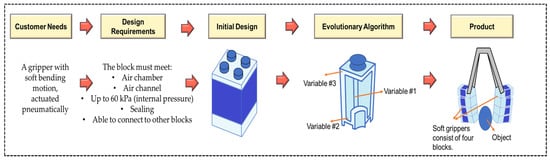
Figure 12.
The design process for building a hybrid gripper involves connecting the fundamental blocks made of rigid and soft materials [116].
Regarding Cr1, explicit technical specifications of design requirements are needed in [116]; however, the designers specify certain design constraints mathematically, such as chamber and air channel specifications, and consider functionality and performance requirements. This design method has much to do with the so-called modular system design. The design requirement could be specified at the level of the design object rather than at the level of the evolutionary computational model. For this research, this design method for soft robots receives a medium rating against Cr1.
Regarding Cr2, designers are expected to propose the initial block design based on their experiences and observations of LEGO structures, according to [116]. Designers use rubber (TangoBlack+) to address soft bending but did not specify the reason for choosing this material, as they do not provide any technical specifications during the design process. The initial architecture includes an air channel to accommodate pneumatic actuation, and the designers make the top and bottom sections of the brick relatively stiffer. However, they do not explicitly state the rationale behind this decision. Subsequently, the designers employ the Taguchi optimization method using evolutionary computing techniques and finite element analysis to optimize the geometry and shape of the initial architecture. They consider wall thickness and two other geometrical parameters, in addition to the proposed initial or concept design, as the design variables. The fitness function of the evolutionary algorithm aims to minimize the Von Mises stress within the block. After obtaining the optimum designs for the block (module), the designers proceeded with a bottom-up method and connected four bricks to create a finger for the gripper. This design method for soft robots creates a concept design empirically rather than based on any principle drawn from physics and chemistry. For this research, this design method receives a low rating against Cr2.
Regarding Cr3, the evolutionary computation method combines systematic and non-systematic processes, and it makes sense in distinct design phases; that is, the designer uses common sense knowledge to create a concept design, a set of modules and their assemblies and then applies evolutionary computation to determine details of the shape of the modules. However, this design method does not emphasize the technical specification of design requirements, which is the first design phase. Overall, the evolutionary computational method receives a rating of medium against Cr3.
3.2. Analysis
The following sections review the analysis of a soft robot. Understanding the structure of soft robots is essential for this analysis. Therefore, Section 3.2.1 discusses the building blocks to construct a soft robot. Section 3.2.2 discusses the actuation methods. Section 3.2.3 discusses mathematical modelling for analysis.
3.2.1. Building Blocks
Any machine or robot is constructed from a set of essential components. For instance, the basic components of conventional machines include gears, belts, and other components. For soft robots, the cubic-shaped voxel components were proposed as a building block for constructing soft robots [117]. Legrand et al. [115] provided an example of such a soft robot. With such voxel components, parallel or serial soft robots can be built. Further, voxel components can be classified into active and passive components. An active voxel component means there is an external input to the voxel component to dictate the deformation of the voxel component. Figure 13 illustrates two samples of voxel-based soft robots.

Figure 13.
Voxel-based soft robots [112]. These robots are formed by assembling the silicone-made voxels in serial and parallel. Casting and 3D printing are two main methods for fabrication of voxels.
So far, the building block for soft robots includes bellows [118,119,120], air chambers (tubes, hoses, and balloons) [121,122,123], coil springs [124,125], leaf springs [126,127], and other elements, such as notch hinges [128], plates [129], beams [130], and irregular shapes [131,132,133]. Figure 14 illustrates these building blocks.

Figure 14.
Common building blocks or components for soft robots.
Deformability and flexibility are two distinctive properties of all building blocks in soft robots, according to the definition of soft robots [2]. Figure 14 shows that bellows and air chambers are the two most frequently used building blocks in soft robots, with 131 and 107 occurrences out of 322 selected results from the literature, respectively. The main reason for the air chamber and bellow blocks being used more than other types of building blocks is the variety of the deformability of these building blocks. For instance, the bellow block with air chambers can create deformations including bending, twisting, and elongating, while other blocks, such as coil spring blocks, can only provide elongation deformations. Furthermore, the unique accordion-like structures of the bellows blocks enable them to easily bend around objects with irregular shapes that seem critical in manipulation tasks [134,135].
Two examples of soft robots using these soft building blocks are shown in Figure 15. One example is a gripper composed of two bellow blocks; see Figure 15a [93]. Each bellow block is actuated by high-pressure air, and a gripping action is realized by regulating the pressure in the bellow block. Figure 15b shows a soft robotic arm, which consists of tendon-driven tubes that can bend and twist [59]. It is noted that bellows and air chambers (tubes) have a single, integrated structure, which makes it relatively easy to fabricate the entire soft robot. The fabrication approach is usually a molding method; specifically, producing more than one block with the same mold. However, the fabrication of soft robots with all kinds of silicone-based components can now be performed quickly and affordably with 3D printing technology [136,137].

Figure 15.
Building block-based soft robots: (a) The bellows block is actuated by high-pressure air [93]; (b) The soft robot includes the tendon-driven tube blocks [59].
3.2.2. Actuation Methods
From the literature, soft robots can execute movements such as crawling, grasping, rolling, and swimming when actuated [59,93,138,139]. There are different kinds of actuation methods. The most popular ones in soft robots are pneumatic, hydraulic, and tendon-driven (cable-driven) mechanisms that are further based on magnetic, electrical, and thermal principles. Figure 15a illustrates an actuator, along with a mechanism, actuated pneumatically, and such a soft robot can undergo expansion in response to positive pressure. Figure 15b illustrates a tendon-driven soft robot, which is further actuated by the tension of cables attached to the robot’s body.
Figure 16 categorizes the most frequent actuation methods for bellows and air chambers in the current soft robots in the literature. According to Figure 16a,b, the pneumatic and tendon-driven actuation methods are currently the most used in soft robots, specifically with the pneumatic actuator, 81% and 76% of the soft robots in the literature for bellows and air chambers, respectively. The advantage of the pneumatic actuator includes a large motion range, high load capacity, no electronic components, heavy equipment that opposes the softness [2], and low cost. A disadvantage of pneumatic actuators is their slow response to stimuli compared to actuators made from smart materials, such as those with shape memory effects, magnetic effects, and piezoelectric effects.

Figure 16.
Different types of actuators in soft robots: (a) Bellows (all shapes of convolutions); (b) Air chambers (tubes, hoses, and balloons).
Following the pneumatic actuation, tendon-driven or cable-driven systems emerge as the second most common method according to the literature search (Figure 16). These systems efficiently transmit high forces (in pulling), enabling soft robots to exert substantial gripping or pulling capabilities. However, tendon-driven actuators demand highly sophisticated mechanical designs because tendons are passive components and rely on a cable system to drive them. Also, the systems may buckle during the pulling of the tendons. A critical shortcoming of the tendon-driven actuation system is that the system is bulky, which can potentially restrict the applications of soft robots. Also, tendons have the potential to wear and tear due to friction and stress over time.
The smart material actuation system (e.g., conductive polymers), often an integral actuator and mechanism, is relatively specialized in applications [140,141,142]. Though they are lightweight and have a quick response, they generally provide a lower output power and a more limited range of motion than other types of actuation systems. Therefore, according to the current literature, the smart material actuation system is often used in precise systems with rapid responses and small deformations.
3.2.3. Mathematical Modeling
By the name “soft”, deformable body mechanics is the basis for analyzing a soft robot. A standard schematic model assumes a whole soft robot as a continuum rod. The first attempt to analyze such a rod is to find methods to build mathematical equations and find their closed-form solutions. These methods are piecewise constant-curvature (PCC) [143] and variable curvature (non-PCC), the latter of which further includes the backbone continuum approximation method [144], spring-mass models [145], and Cosserat rod theory [146]. In the PCC approach, the continuous curvature of a flexible element is approximated by dividing the structure into segments or sections, each having a constant curvature. By representing the shape of the soft robot as a series of connected arcs with consistent curvature, the mathematical modelling becomes more manageable, allowing for real-time analysis and control of robots. The non-PCC method assumes otherwise variable curvatures across the whole rod. For instance, in the backbone continuum approximation method, the backbone curvature of the whole rod is no longer constant. This becomes particularly relevant when considering mathematical frameworks, such as Cosserat rod theory, designed for slender, flexible structures. Unlike classical rod theories, Cosserat rod theory considers translational and rotational degrees of freedom at each point along the rod element. Non-PCC methods are more complicated but more accurate than PCC methods. The backbone continuum approximation method, a kind of non-PCC approach, is more suitable for hyper-redundant robot manipulators. However, it has limitations for quickly capturing the responses of the deformation of soft robots.
The schematic model of a soft robot based on the stiffness, damper, and inertia (or mass) is another idea for developing a mathematical analysis tool for soft robots, called the spring-mass-damper model. However, this schematic model involves damping and does not match well with the building block of a soft robot; this model is not quite popular in the current literature. Another reason is that the spring-damper-mass model is not suitable because it is expected to be a linear model (for the availability of closed-form solutions). However, in soft robots, nonlinear behavior prevails. As a result, numerical modelling methods, e.g., Finite Element Methods (FEM), are studied in the current literature.
Finite Element Analysis (FEA) tools include open-source packages, like Simulation Open Framework Architecture (SOFA) and VoxCAD, and popular commercial types of software, like Abaqus/CAE and ANSYS, to model soft robots. These software packages provide a range of tools and features to help with the modelling, simulation, and analysis of soft robots with large deformations, soft materials, and nonlinear behaviors. Ferrentino et al. [147] presented a tutorial on creating a tendon-driven soft actuator using SOFA. Schegg et al. [148] analyzed the behavior of a few soft robots in different applications using the SOFA framework. Programming skills and high-performance computers are necessary to run SOFA. Moreover, SOFA has limited CAD tools for sketching and creating 3D models of complex shapes [149].
VoxCAD or VoxelCAD is another tool for analyzing voxel-based soft robots [146,147,148,149,150,151,152]. Various voxels can be found in the VoxelCAD library [112]. Voxel can be viewed as a virtual finite element. By virtual, it means that it is a surrogate of a real component. Because of this feature, voxel-based analysis can only be used for simple soft robots based on the thermal dynamic principle.
Many general-purpose FEM tools, such as Abaqus/CAE and ANSYS, can capture more complex soft robots, e.g., nonlinear deformation [153,154,155,156]. For instance, Abaqus/CAE can work for hyper-elastic and viscoelastic materials models, which are crucial complex soft robots. Salem et al. [157] used ABAQUS/CAE to analyze the nonlinear behavior of a low-cost and flexible soft pneumatic gripper fabricated via 3D printing technology. ANSYS is another reliable software with a user-friendly interface and various features, such as a CAD interface, material inventory, mechanical analysis, and the ability to generate output graphs. E G and P S [158] used FEM modelling with ANSYS software to design a soft pneumatic gripper. Figure 17 illustrates the step-by-step process of modeling and analyzing a soft finger using FEM software [159]. It is noted that despite the improved accuracy with the FEM for soft robots, simulation can still have significant errors, e.g., the comparison of the simulation and the experiment made in [160], see Figure 18.
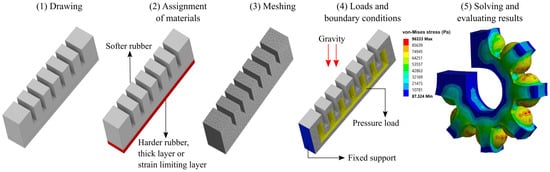
Figure 17.
The detailed steps of modeling and analyzing a pneumatic actuated soft bellow finger using FEM software [159]. The process includes geometry creation, material property assignment, meshing, boundary conditions application, loading conditions, and the final analysis results.

Figure 18.
Evaluating the results [160]: (a) simulation results; (b) real-world prototype results.
3.3. Knowledge Gaps
We can derive knowledge (including technology) gaps from the above discussion. First, it is helpful to revisit that design activities include synthesis (or design) and analysis, which require mathematical modelling. Further, both rely on the overall architecture of soft robots, i.e., building blocks and their connections. The following section presents knowledge (including technology gaps) in the design methods for soft robots.
Knowledge gap 1: The overall knowledge gaps with the SOTA methods can be derived by rating them against the criteria; see Figure 19 for a summary of the ratings. It may be clear from Figure 19 that no method scores ‘high’ in all three criteria. Nevertheless, the TO design method has received the highest overall score among all three methods.

Figure 19.
The performance of the bio-inspired design method, topology optimization method, and evolutionary computation method, against the three criteria (Cr1–Cr3). N/A stands for not applicable.
Knowledge gap 2: The desired structure of soft robots should be a mix of soft materials and hard materials with the former wrapping the latter, because soft robots resemble creatures and animals, in which the bone is a hard material, while the muscle and other tissues are a soft material. However, the contemporary soft robots in literature are made of soft materials only.
Knowledge gap 3: The desired building blocks or components for the soft robot are expected to have large deformations and to embed fluids in the blocks, with the fluids interacting with the blocks to generate deformations programmatically. Such blocks can be viewed as a soft micro/macro-fluidic system [161], a solid and fluid interacting system where the solid part is soft. However, state-of-the-art (SOTA) design methods do not take whole blocks as design objects. It is worth mentioning that 3D printing technology is promising to fabricate such complicated building blocks.
Knowledge gap 4: The general architecture of the robot is such that a robot has five sub-systems, namely the power generator and supply, actuator, mechanism, sensor, and controller. In practice, a partial robot makes sense; for example, a robot may not have a power generator and supply on board or not have a controller or sensor on board, depending on applications. To a rigid body robot, all its on-board sub-systems (mechanism, actuator, etc.) act without involving the deformation principle, while to a soft robot, all its on-board sub-systems share their deformations such that their behaviors are affecting each other. The SOTA design methods in the literature have missed the foregoing understanding, and consequently, each of the sub-systems is designed separately with inherent limitations (i.e., they are unable to capture the dependency of the sub-systems).
Knowledge gap 5: The desired method for analysis is measured by two attributes, accuracy and computational efficiency, which are potentially in conflict. Depending on the application, the desired method is expected to have high accuracy but satisfactory computational efficiency (suitable for real-time control applications). The SOTA method, which is based on the finite element technique, is not suitable for real-time control applications, while the method, which is based on elastic theory and various closed-form solution techniques, has low accuracy.
4. Future Directions of Research
Future work is proposed to consider closing knowledge gaps and going further to advise soft robotics.
First, to close knowledge gap 1, research for a new design method is urgent. The new design method must follow the general engineering design processes, which are required to first develop a technical specification of requirements. This does not mean the design is conducted without iteration; rather, the design decision always originates from the design requirement. This is followed by activities taking three logically distinct phases (concept, embodiment, detail or surface). The idea for this new design approach can be outlined. This approach will be based on the topology optimization procedure with high-level modules or building blocks instead of primitive elements such as beams and hinges. It is worth mentioning that the TO approach for soft robots in the current literature, as discussed above, is the TO procedure with a primitive element, and this approach is rated against the criteria (Cr1: medium; Cr2: medium; Cr3: high). We hypothesize that starting with high-level modules or components will allow us to specify the design requirements at the design object level, which will make this new method highly rated in all three criteria.
Second, research on building blocks is warranted to close the knowledge gaps 2 and 3. There are three ideas for this research. The first idea is to design a hybrid building block with a hard interior and soft exterior, like a bone with muscle around the bone. The idea is, in fact, biomimetic. The second idea is to generalize a soft micro-fluidic system concept [161] as a new building block for soft robots, namely, the soft infrastructure embracing fluids. The shape of such soft infrastructure could include structures that can undergo large deformation, such as hollow helical structures. A hollow helical structure can have large deformation, while fluids can flow in the hollow to perform a controlled actuation to deform the structure. The third idea is to apply the hydrogel concept, namely hydrogel systems, as a concept for new building blocks for soft robots.
Third, research is warranted to close knowledge gap 4 to define a soft robot from an integral view. The author observes that a soft robot is a highly integral system. Though the contemporary soft robot is modularized (see the above discussion), deformations of modules make the modules couple to perform the five basic functions: power generation and supply, actuation, mechanism, sensor, and control. It is noted that this integral view will affect the synthesis of a soft robot.
Fourth, to close knowledge gap 5, research is warranted to develop a mathematical model to compute the behavior of a group of high-level modules, e.g., a group of bellows, with a lumped fashion. The concept of lumped means that these high-level modules will be viewed as a parametric black box, defined by a set of attributes representing the stiffness, inertia, and damper. By parametric, it means that the stiffness, inertia, and damper are further dependent on the parameters that describe the shape and geometry of the modules.
Fifth, to an entirely soft, autonomous robot, its controller, sensor, and power generator are unique in that electrons are replaced by fluids [2]. In this connection, the architecture and principle of entirely soft, autonomous robots (soft controller, soft sensor, soft power generator), along with how to design them, have yet to be discovered and warrant future research. In the case of partial soft, non- or semi-autonomous robots, the power generator/supply is absent; the sensor is like the sensor of the traditional robots. In this case, the robot consists of the soft machine (the soft actuator and the soft mechanism) and the controller for the soft machine, and we further assume that the robot is electron-based rather than fluid-based. The controller, in this case, will be more complex than the controller for the conventional robot with the flexible link and the flexible joint [162,163] because the controller for such a kind of soft robot needs to consider not only the flexible link and the flexible joint but also the soft actuator.
Finally, we propose a new interdisciplinary program called soft robotics. As it may be apparent from the above discussion, soft robotics or soft robot technology is an emerging discipline with a meaningful body of interdisciplinary knowledge, crossing material science and engineering, computer science and engineering, mechatronics, manufacturing technology, and biology. The program may take 5 years in the context of North America, built on the top of engineering and computer science and run by a multidisciplinary team.
5. Conclusions and Contributions of the Paper
It can be concluded that (1) soft robotics is a new field of robotics, and the unique feature of soft robots is the management of deformations of materials that construct a soft robot, and (2) the state-of-the-art knowledge, as well as the technology for developing a soft robot, is still under desired.
The main contribution of the present review paper is twofold. (1) The present paper has collected literature on soft robotics with a high degree of completeness because the review followed the so-called systematic review procedure. Nonetheless, we focus on semantics rather than syntactic, e.g., the number of papers each year. (2) The present paper has developed a systematic approach to derive knowledge gaps distinct from the complementary literature review papers. The important feature of this approach is to define the so-called “golden standard or reference”. This approach has a generalized implication for all fields of science and technology. (3) This review has identified knowledge gaps in the field of soft robotics and has proposed future research to close these knowledge gaps.
Author Contributions
Writing—original draft preparation, B.H.; writing—review and editing, B.H., W.Z., L.C. and K.-Y.S.; Gathering and analyzing data B.H. and W.Z.; supervision, W.Z. All authors have read and agreed to the published version of the manuscript.
Funding
This review is part of the research funded by the International Dean’s Scholarship and the University of Saskatchewan Devolved Ph.D. Scholarship at the University of Saskatchewan. This research is supported by the NSERC (Natural Sciences and Engineering Research Council of Canada) Discovery Grant (RGPIN 06007-2016).
Data Availability Statement
The data presented in this review paper encompasses an extensive analysis of existing literature, including a critical review of materials. As this review involves synthesizing and interpreting information from published sources, the primary data consists of scholarly references, datasets, and analyses inherent in the reviewed literature. Researchers seeking further information are encouraged to inquire with the corresponding author at chris.zhang@usask.ca.
Conflicts of Interest
The authors declare no conflicts of interest. The funders had no role in the design of the study, the collection, analysis, or interpretation of data, the writing of the manuscript, or the decision to publish the results.
References
- Asghar, A.; Iqbal, M.; Khaliq, A.; Rehman, S.U.; Iqbal, J. Performance comparison of structured H∞ based looptune and LQR for a 4-DOF robotic manipulator. PLoS ONE 2022, 17, e0266728. [Google Scholar] [CrossRef] [PubMed]
- Chen, A.; Yin, R.; Cao, L.; Yuan, C.; Ding, H.K.; Zhang, W.J. Soft robotics: Definition and research issues. In Proceedings of the 24th International Conference on Mechatronics and Machine Vision in Practice (M2VIP), Auckland, New Zealand, 21–23 November 2017; pp. 366–370. [CrossRef]
- Trivedi, D.; Rahn, C.D.; Kier, W.M.; Walker, I.D. Soft robotics: Biological inspiration, state of the art, and future research. Appl. Bionics Biomech. 2008, 5, 99–117. [Google Scholar] [CrossRef]
- Rus, D.; Tolley, M.T. Design, fabrication, and control of soft robots. Nature 2015, 521, 467–475. [Google Scholar] [CrossRef] [PubMed]
- Kastor, N.; Vikas, V.; Cohen, E.; White, R.D. A Definition of Soft Materials for Use in the Design of Robots. Soft Robot. 2017, 4, 181–182. [Google Scholar] [CrossRef]
- Li, G.; Qiu, W.; Wang, M.; Zhu, Y.; Liu, F. Development of an earthworm-based soft robot for colon sampling. Front. Robot. AI 2024, 11, 1309220. [Google Scholar] [CrossRef] [PubMed]
- Lindenroth, L.; Bano, S.; Stilli, A.; Manjaly, J.G.; Stoyanov, D. A fluidic soft robot for needle guidance and motion compensation in intratympanic steroid injections. IEEE Robot. Autom. Lett. 2021, 6, 871–878. [Google Scholar] [CrossRef]
- Mohammadi, A.; Lavranos, J.; Tan, Y.; Choong, P.; Oetomo, D. A paediatric 3D-printed soft robotic hand prosthesis for children with upper limb loss. In Proceedings of the 2020 42nd Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC) in Conjunction with the 43rd Annual Conference of the Canadian Medical and Biological Engineering Society, Montreal, QC, Canada, 20–24 July 2020; pp. 3310–3313. [Google Scholar] [CrossRef]
- Zheng, Y.; Cao, L.; Qian, Z.; Chen, A.; Zhang, W. Topology optimization of a fully compliant prosthetic finger: Design and testing. In Proceedings of the 2016 6th IEEE International Conference on Biomedical Robotics and Biomechatronics (BioRob), Singapore, 26–29 June 2016; pp. 1029–1103. [Google Scholar] [CrossRef]
- Liu, S.Q.; Zhang, H.B.; Yin, R.X.; Chen, A.; Zhang, W.J. Flexure Hinge Based Fully Compliant Prosthetic Finger. Proc. SAI Intell. Syst. Conf. (IntelliSys) 2016, 2, 839–849. [Google Scholar] [CrossRef]
- Liu, S.; Zhang, H.; Yin, R.; Chen, A.; Zhang, W. Finite Element Analysis and Application of a Flexure Hinge Based Fully Compliant Prosthetic Finger. In Advanced Computational Methods in Life System Modeling and Simulation, Proceedings of International Conference on Life System Modeling and Simulation, LSMS 2017 and International Conference on Intelligent Computing for Sustainable Energy and Environment, ICSEE 2017, Nanjing, China, 22–24 September 2017; Communications in Computer and Information Science; Springer: Berlin/Heidelberg, Germany, 2017; pp. 191–198. [Google Scholar] [CrossRef]
- Song, K.Y.; Behzadfar, M.; Zhang, W.J. A Dynamic Pole Motion Approach for Control of Nonlinear Hybrid Soft Legs: A Preliminary Study. Machines 2022, 10, 875. [Google Scholar] [CrossRef]
- Zhou, X.; Ma, Z.; Wang, K.; Zhang, G.; Ren, D.; Zhang, W.; Zhang, B.; Yin, R. Motion Control of Magnetic-Controlled Spiral Microrobots for In-vitro Plaque Removal. IEEE Robot. Autom. Lett. 2024, 9, 5671–5678. [Google Scholar] [CrossRef]
- Wang, Y.; Xie, Z.; Huang, H.; Liang, X. Pioneering Healthcare with Soft Robotic Devices: A Review. Smart Med. 2024, 3, e20230045. [Google Scholar] [CrossRef]
- Horvath, A.S.; Jochum, E.; Löchtefeld, M.; Vissonova, K.; Merritt, T. Soft robotics workshops: Supporting experiential learning about design, movement, and sustainability. In Cultural Robotics: Social Robots and Their Emergent Cultural Ecologies; Dunstan, B.J., Koh, J.T.K.V., Turnbull Tillman, D., Brown, S.A., Eds.; Springer International Publishing: Cham, Switzerland, 2023; pp. 189–218. [Google Scholar] [CrossRef]
- Lin, Y.; Xu, Y.X.; Juang, J.Y. Single-actuator soft robot for in-pipe crawling. Soft Robot. 2023, 10, 174–186. [Google Scholar] [CrossRef] [PubMed]
- Lu, Q.; Feng, Y.; Song, K.Y.; Zhang, W.J. 3D Printable Micro/Macro Dual Driving Multipede Millirobot and Its Characterization for Multi-Locomotory Modes. IEEE/ASME Trans. Mechatron. 2023, 28, 1–10. [Google Scholar] [CrossRef]
- Giordano, G.; Murali Babu, S.P.; Mazzolai, B. Soft robotics towards sustainable development goals and climate actions. Front. Robot. AI 2023, 10, 1116005. [Google Scholar] [CrossRef] [PubMed]
- Zhang, W.J.; Dijk Van, A. On developing an intelligent editor system for machine conceptual design: Application of database technology. In Computer-Aided Conceptual Design; Sharpe, J., Ho, V., Eds.; LooseLeaf Co.: Brecon, UK, 1994; pp. 221–240. [Google Scholar]
- Tony, A.; Badea, I.; Yang, C.; Liu, Y.; Wells, G.; Wang, K.; Yin, R.; Zhang, H.; Zhang, W. The Additive Manufacturing Approach to Polydimethylsiloxane (PDMS) Microfluidic Devices: Review and Future Directions. Polymers 2023, 15, 1926. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Z.M.; An, Q.; Li, J.W.; Zhang, W.J. Piezoelectric friction–inertia actuator—A critical review and future perspective. Int. J. Adv. Manuf. Technol. 2012, 62, 669–685. [Google Scholar] [CrossRef]
- Zhao, Y.; Zhu, D.; Zhou, F.; Song, J.; Zhang, W. An Axiomatic Design Theory for Design of Apparel Products. J. Eng. Fibers Fabr. 2022, 17, 15589250221134350. [Google Scholar] [CrossRef]
- Pahl, G.; Beitz, W. Engineering design: A systematic approach. Nasa Sti/Recon Tech. Rep. A 1988, 89, 47350. [Google Scholar]
- Fan, L.X.; Cai, M.Y.; Lin, Y.; Zhang, W.J. Axiomatic design theory: Further notes and its guideline to applications. Int. J. Mater. Prod. Technol. 2015, 51, 359–374. [Google Scholar] [CrossRef]
- Zhang, W.J.; Wang, J.W. Design Theory and Methodology for Enterprise Systems. Ent. Inf. Syst. 2016, 10, 245–248. [Google Scholar] [CrossRef]
- Bi, Z.; Lin, Y.; Zhang, W.J. The general architecture of adaptive robotic systems for manufacturing applications. Robot. Comput.-Integr. Manuf. 2010, 26, 461–470. [Google Scholar] [CrossRef]
- Dai, Z. Improvement of General Design Theory and Methodology with Its Application to Design of a Retractor for Ventral Hernia Repair Surgery. Doctoral Dissertation, University of Saskatchewan, Saskatoon, SK, Canada, March 2019. [Google Scholar]
- Wu, Z.F.; Li, J.; Cai, M.Y.; Lin, Y.; Zhang, W.J. On membership of black-box or white-box of artificial neural network models. In Proceedings of the IEEE 11th Conference on Industrial Electronics and Applications (ICIEA), Hefei, China, 5–7 June 2016; pp. 1400–1404. [Google Scholar] [CrossRef]
- Zhang, W.J. An Integrated Environment for CAD/CAM of Mechanical Systems. Ph.D. Thesis, Delft University of Technology, Delft, The Netherlands, 1994. [Google Scholar]
- Bi, Z.; Zhang, W. Modularity Technology in Manufacturing: Taxonomy and Issues. Int. J. Adv. Manuf. Technol. 2001, 18, 381–390. [Google Scholar] [CrossRef]
- Zhang, W.J.; van der Werff, K.; van Luttervelt, C.A. A generic mechanism model for use in a CIM environment for the development of mechanized production machines. Ann. CIRP 1993, 42, 135–138. [Google Scholar] [CrossRef]
- Zhang, W.J.; van der Werff, K. Automatic communication from a neutral object model of mechanisms to mechanism analysis program system based on a finite element approach. Finite Elem. Anal. Des. 1997, 28, 209–240. [Google Scholar] [CrossRef]
- Liu, W.; Jing, Z.; Huang, J.; Dun, X.; Qiao, L.; Leung, H.; Chen, W. An Inchworm-snake Inspired Flexible Robotic Manipulator with Multi-section SMA Actuators for Object Grasping. IEEE Trans. Ind. Electron. 2023, 70, 12616–12625. [Google Scholar] [CrossRef]
- Ma, K.; Chen, X.; Zhang, J.; Xie, Z.; Wu, J.; Zhang, J. Inspired by Physical Intelligence of an Elephant Trunk: Biomimetic Soft Robot with Pre-programmable Localized Stiffness. IEEE Robot. Autom. Lett. 2023, 8, 2898–2905. [Google Scholar] [CrossRef]
- Miao, Z.; Liang, J.; Chen, H.; Lu, J.; Sun, X.; Liu, Y.; Tang, F.; Zhang, M. Power Autonomy and Agility Control of an Untethered Insect-Scale Soft Robot. Soft Robot. 2023, 10, 749–759. [Google Scholar] [CrossRef] [PubMed]
- Qiu, J.; Ji, A.; Zhu, K.; Han, Q.; Wang, W.; Qi, Q.; Chen, G. A Gecko-Inspired Robot with a Flexible Spine Driven by Shape Memory Alloy Springs. Soft Robot. 2023, 10, 713–723. [Google Scholar] [CrossRef] [PubMed]
- Wang, W.; Li, W.; Xu, J.; Dong, J.; Xiang, C.; Guan, Y.; Zhang, T. Design, and Implementation of a Miniature Jellyfish-Inspired Robot. IEEE Robot. Autom. Lett. 2023, 8, 3134–3141. [Google Scholar] [CrossRef]
- Xing, J.; Jin, W.; Yang, K.; Howard, I. A Bionic Piezoelectric Robotic Jellyfish with a Large Deformation Flexure Hinge. IEEE Trans. Ind. Electron. 2023, 70, 12596–12605. [Google Scholar] [CrossRef]
- Xu, Q.; Liu, J. Dynamic Research on Nonlinear Locomotion of Inchworm-Inspired Soft Crawling Robot. Soft Robot. 2023, 10, 660–672. [Google Scholar] [CrossRef] [PubMed]
- Zhou, L.; Ngo, T.D.; La, H.M.; Ho, V.A. Soft Robotic Hand for Sushi Grasping and Handling. In Proceedings of the 2023 IEEE/SICE International Symposium on System Integration (SII), Atlanta, GA, USA, 17–20 January 2023; pp. 1–7. [Google Scholar] [CrossRef]
- Zheng, Z.; Kumar, P.; Chen, Y.; Cheng, H.; Wagner, S.; Chen, M.; Verma, N.; Sturm, J.C. Model-Based Control of Planar Piezoelectric Inchworm Soft Robot for Crawling in Constrained Environments. In Proceedings of the 2022 IEEE 5th International Conference on Soft Robotics (RoboSoft), Edinburgh, UK, 4–8 April 2022; pp. 693–698. [Google Scholar] [CrossRef]
- Zhang, J.Z.; Zhang, Y.; Ma, P.; Nava, E.; Du, T.; Arm, P.; Matusik, W.; Katzschmann, R.K. Sim2Real for Soft Robotic Fish via Differentiable Simulation. In Proceedings of the 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Kyoto, Japan, 23–27 October 2022; pp. 12598–12605. [Google Scholar] [CrossRef]
- Yuanzhong, L.; Takanishi, A.; Ishii, H. Design of a Soft Rat Robot Based on Pneumatic Actuator. In Proceedings of the 2022 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), Sapporo, Japan, 11–15 July 2022; pp. 926–931. [Google Scholar] [CrossRef]
- Wang, Y.; Zhang, P.; Huang, H.; Zhu, J. Bio-Inspired Transparent Soft Jellyfish Robot. Soft Robot. 2023, 10, 590–600. [Google Scholar] [CrossRef] [PubMed]
- Wang, C.; Puranam, V.R.; Misra, S.; Venkiteswaran, V.K. A Snake-Inspired Multi-Segmented Magnetic Soft Robot Towards Medical Applications. IEEE Robot. Autom. Lett. 2022, 7, 5795–5802. [Google Scholar] [CrossRef]
- Villani, A.; Ciucci, G.; Colliva, A.; Marullo, S.; Zacchigna, S.; Prattichizzo, D. RobHeart: Soft Robot for Heart-Like Volumetric Stress on Seeded Cardiac Cells. In Proceedings of the 2022 9th IEEE RAS/EMBS International Conference for Biomedical Robotics and Biomechatronics (BioRob), Seoul, Republic of Korea, 21–24 August 2022; pp. 1–8. [Google Scholar] [CrossRef]
- Rezaei, M.H.; Reza Kolani, M.; Mirhaghgoo Jalali, S.A.; Zareinejad, M. Earthworm-Inspired In-pipe Soft Robot (ESR): Design, Modeling, and Implementation. In Proceedings of the 2022 10th RSI International Conference on Robotics and Mechatronics (ICRoM), Tehran, Iran, 22–24 November 2022; pp. 125–131. [Google Scholar] [CrossRef]
- Bell, M.A.; Weaver, J.C.; Wood, R.J. An Ambidextrous STarfish-Inspired Exploration and Reconnaissance Robot (The ASTER-bot). Soft Robot. 2022, 9, 991–1000. [Google Scholar] [CrossRef] [PubMed]
- Yang, X.; Tan, R.; Lu, H.; Shen, Y. Starfish Inspired Milli Soft Robot with Omnidirectional Adaptive Locomotion Ability. IEEE Robot. Autom. Lett. 2021, 6, 3325–3332. [Google Scholar] [CrossRef]
- Tang, C.; Huang, H.; Li, B. Design and Control of a Magnetic Driven Worm-like Micro-robot. In Proceedings of the 2021 IEEE International Conference on Robotics and Biomimetics (ROBIO), Sanya, China, 27–31 December 2021; pp. 1304–1308. [Google Scholar]
- Xie, Z.; Domel, A.G.; An, N.; Green, C.; Gong, Z.; Wang, T.; Knubben, E.M.; Weaver, J.C.; Bertoldi, K.; Wen, L. Octopus Arm-Inspired Tapered Soft Actuators with Suckers for Improved Grasping. Soft Robot. 2020, 7, 639–648. [Google Scholar] [CrossRef] [PubMed]
- Ishige, M.; Umedachi, T.; Taniguchi, T.; Kawahara, Y. Exploring Behaviors of Caterpillar-Like Soft Robots with a Central Pattern Generator-Based Controller and Reinforcement Learning. Soft Robot. 2019, 6, 579–594. [Google Scholar] [CrossRef] [PubMed]
- Seok, S.; Onal, C.D.; Cho, K.J.; Wood, R.J.; Rus, D.; Kim, S. Meshworm: A peristaltic soft robot with antagonistic nickel titanium coil actuators. IEEE/ASME Trans. Mechatron. 2013, 18, 1485–1497. [Google Scholar] [CrossRef]
- Laschi, C.; Cianchetti, M.; Mazzolai, B.; Margheri, L.; Follador, M.; Dario, P. Soft robot arm inspired by the octopus. Adv. Robot. 2012, 26, 709–727. [Google Scholar] [CrossRef]
- Lin, H.T.; Leisk, G.G.; Trimmer, B. GoQBot: A caterpillar-inspired soft-bodied rolling robot. Bioinspir. Biomim. 2011, 6, 026007. [Google Scholar] [CrossRef] [PubMed]
- Zhou, D.; Fu, Y.; Deng, J.; Sun, J.; Liu, Y. A Bistable Jumping Robot with Pure Soft Body Actuated by Twisted Artificial Muscle. In Proceedings of the 2021 27th International Conference on Mechatronics and Machine Vision in Practice (M2VIP), Shanghai, China, 26–28 November 2021; pp. 388–393. [Google Scholar]
- Liu, Y. Soft robot review: Actuation and application. In Proceedings of the 2022 International Conference on Electronics and Devices, Computational Science (ICEDCS), Marseille, France, 20–22 September 2022; pp. 23–26. [Google Scholar] [CrossRef]
- Lloyd, P.; Thomas, T.L.; Venkiteswaran, V.K.; Pittiglio, G.; Chandler, J.H.; Valdastri, P.; Misra, S. A Magnetically Actuated Coiling Soft Robot with Variable Stiffness. IEEE Robot. Autom. Lett. 2023, 8, 3262–3269. [Google Scholar] [CrossRef]
- Wockenfuß, W.R.; Brandt, V.; Weisheit, L.; Drossel, W.G. Design, Modeling and Validation of a Tendon-Driven Soft Continuum Robot for Planar Motion Based on Variable Stiffness Structures. IEEE Robot. Autom. Lett. 2022, 7, 3985–3991. [Google Scholar] [CrossRef]
- Zhang, X.; Yan, J.; Zhao, J. A Gas–Ribbon-Hybrid Actuated Soft Finger with Active Variable Stiffness. Soft Robot. 2022, 9, 250–265. [Google Scholar] [CrossRef] [PubMed]
- Zhang, T.; Zhang, W.; Gupta, M.M. Resilient Robots: Concept, Review, and Future Directions. Robotics 2017, 6, 22. [Google Scholar] [CrossRef]
- Zhang, W.J.; Van Luttervelt, C.A. Toward a Resilient Manufacturing System. CIRP Ann. 2011, 60, 469–472. [Google Scholar] [CrossRef]
- Zhang, W.J.; Lin, Y. On the Principle of Design of Resilient Systems—Application to Enterprise Information Systems. Ent. Inf. Syst. 2010, 4, 99–110. [Google Scholar] [CrossRef]
- Sun, Z.H.; Yang, G.S.; Zhang, B.; Zhang, W.J. On the Concept of the Resilient Machine. In Proceedings of the 2011 6th IEEE Conference on Industrial Electronics and Applications (ICIEA), Beijing, China, 21–23 June 2011; pp. 357–360. [Google Scholar] [CrossRef]
- Wang, F.; Qian, Z.; Yan, Z.; Yuan, C.; Zhang, W. A Novel Resilient Robot: Kinematic Analysis and Experimentation. IEEE Access 2019, 8, 2885–2892. [Google Scholar] [CrossRef]
- Orozco, F.; Horvat, D.; Miola, M.; Moreno-Villoslada, I.; Picchioni, F.; Bose, R.K. Electroactive Thermo-Pneumatic Soft Actuator with Self-Healing Features: A Critical Evaluation. Soft Robot. 2023, 10, 852–859. [Google Scholar] [CrossRef] [PubMed]
- Jiang, F.; Zhang, Z.; Wang, X.; Cheng, G.; Zhang, Z.; Ding, J. Pneumatically Actuated Self-Healing Bionic Crawling Soft Robot. J. Intell. Robot. Syst. 2020, 100, 445–454. [Google Scholar] [CrossRef]
- Annabestani, M.; Kamare, B.; Shabani, M.; Magalhaes, S.V.; Mondini, A.; Mazzolai, B. A Bioinspired Multifunctional Soft Gripper with Embedded Sensing Ability: A potential way for sustainable agricultural harvesting. In Proceedings of the 2023 IEEE International Workshop on Metrology for Agriculture and Forestry (MetroAgriFor), Pisa, Italy, 6–8 November 2023; pp. 182–187. [Google Scholar] [CrossRef]
- Hashanjana, L.; Senanayaka, P.; Madushan, I.; Himaruwan, H.D.S.; Kulasekera, A.L.; Dassanayake, P.C. Design and Development of a Soft Gripper System for Difficult-to-Handle Food Items. In Proceedings of the 2023 Moratuwa Engineering Research Conference (MERCon), Moratuwa, Sri Lanka, 9–11 November 2023; pp. 678–683. [Google Scholar] [CrossRef]
- Banerjee, A. The Impact of Soft Robotics in Today’s World: Applications, Challenges Faced, And Future Outlook. In Proceedings of the 2022 International Conference on Smart Generation Computing, Communication and Networking (SMART GENCON), Bangalore, India, 23–25 December 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Navas, E.; Fernández, R.; Sepúlveda, D.; Armada, M.; Gonzalez-de-Santos, P. Soft Gripper for Robotic Harvesting in Precision Agriculture Applications. In Proceedings of the 2021 IEEE International Conference on Autonomous Robot Systems and Competitions (ICARSC), Santa Maria da Feira, Portugal, 28–29 April 2021; pp. 167–172. [Google Scholar] [CrossRef]
- Cheng, W.B.; Di, Y.Y.; Zhang, E.M.; Moser, M.A.; Kanagaratnam, S.; Korman, L.Y.; Zhang, W.J. Modeling and In Vitro Experimental Validation for Kinetics of the Colonoscope in Colonoscopy. Ann. Biomed. Eng. 2013, 41, 1084–1093. [Google Scholar] [CrossRef]
- Cheng, W.B.; Moser, M.; Kanagaratnam, S.; Zhang, W.J. Development of Autonomous Microrobotics in Endoscopy. J. Med. Eng. Technol. 2011, 35, 391–401. [Google Scholar] [CrossRef] [PubMed]
- Hu, X.; Cao, L.; Luo, Y.; Chen, A.; Zhang, E.; Zhang, W.J. A Novel Methodology for Comprehensive Modeling of the Kinetic Behavior of Steerable Catheters. IEEE/ASME Trans. Mechatron. 2019, 24, 1785–1797. [Google Scholar] [CrossRef]
- Hu, X.; Chen, A.; Luo, Y.; Zhang, C.; Zhang, E. Steerable Catheters for Minimally Invasive Surgery: A Review and Future Directions. Comput. Assist. Surg. 2018, 23, 21–41. [Google Scholar] [CrossRef] [PubMed]
- Hu, N.; Ding, L.; Liu, Y.; Wang, K.; Zhang, B.; Yin, R.; Zhang, W. Development of 3D-Printed Magnetic Micro-Nanorobots for Targeted Therapeutics: The State of Art. Adv. NanoBiomed Res. 2023, 3, 2300018. [Google Scholar] [CrossRef]
- Chen, M.; Wang, D.; Zou, J.; Sun, L.; Sun, J.; Jin, G. A Multi-Module Soft Robotic Arm with Soft End Effector for Minimally Invasive Surgery. In Proceedings of the 2nd World Conference on Mechanical Engineering and Intelligent Manufacturing (WCMEIM), Shanghai, China, 22–24 November 2019; pp. 461–465. [Google Scholar] [CrossRef]
- Kwok, K.W.; Wurdemann, H.; Arezzo, A.; Menciassi, A.; Althoefer, K. Soft Ro-bot-Assisted Minimally Invasive Surgery and Interventions: Advances and Outlook. Proc. IEEE 2022, 110, 871–892. [Google Scholar] [CrossRef]
- Ren, H.; Gu, X.; Tan, K.L. Human-compliant body-attached soft robots towards automatic cooperative ultrasound imaging. In Proceedings of the IEEE 20th International Conference on Computer Supported Cooperative Work in Design (CSCWD), Nanchang, China, 4–6 May 2016; pp. 653–658. [Google Scholar] [CrossRef]
- Wang, H.; Totaro, M.; Beccai, L. Toward perceptive soft robots: Progress and challenges. Adv. Sci. 2018, 5, 1800541. [Google Scholar] [CrossRef] [PubMed]
- Li, W.B.; Guo, X.Y.; Zhang, W.M. SomBot: A Bio-inspired Dynamic Somersaulting Soft Robot. IEEE Robot. Autom. Lett. 2021, 6, 1654–1661. [Google Scholar] [CrossRef]
- Dalklint, A.; Wallin, M.; Tortorelli, D. Simultaneous shape and topology optimization of inflatable soft robots. Comput. Methods Appl. Mech. Eng. 2024, 420, 116751. [Google Scholar] [CrossRef]
- Liu, C.H.; Chung, F.M.; Chen, Y.; Chiu, C.H.; Chen, T.L. Optimal Design of a Motor-Driven Three-Finger Soft Robotic Gripper. IEEE/ASME Trans. Mechatron. 2020, 25, 1830–1840. [Google Scholar] [CrossRef]
- Caasenbrood, B.; Pogromsky, A.; Nijmeijer, H. A computational design framework for pressure-driven soft robots through nonlinear topology optimization. In Proceedings of the 2020 3rd IEEE International Conference on Soft Robotics (RoboSoft), New Haven, CT, USA, 15 May–15 July 2020; pp. 633–638. [Google Scholar] [CrossRef]
- Lipson, H. Challenges and opportunities for design, simulation, and fabrication of soft robots. Soft Robot. 2014, 1, 21–27. [Google Scholar] [CrossRef]
- Chen, S.; Zhou, G.; Li, D.; Song, Z.; Chen, F. Soft robotic joints with anisotropic stiffness by multi objective topology optimization. IEEE/ASME Trans. Mechatron. 2024, 29, 1064–1075. [Google Scholar] [CrossRef]
- Sun, Y.; Wang, Z.; Pancheri, F.; Lueth, T.C. Toqro: A flexible quadruped walking robot with topology optimized soft legs. In Proceedings of the 2024 IEEE 7th International Conference on Soft Robotics (RoboSoft), San Diego, CA, USA, 14–17 April 2024; pp. 61–66. [Google Scholar] [CrossRef]
- Srinivas, G.L.; Mohammad, A.; Brandstötter, M. Design and development of fin-ray finger using topology optimization with multiple load cases. In Proceedings of the 2024 International Conference on Cognitive Robotics and Intelligent Systems (ICC-ROBINS), Coimbatore, India, 17–19 April 2024; pp. 1–7. [Google Scholar] [CrossRef]
- Srinivas, G.L.; Javed, A.; Faller, L.M. Versatile 3D-printed fin-ray effect soft robotic fingers: Lightweight optimization and performance analysis. J Braz. Soc. Mech. Sci. Eng. 2024, 46, 382. [Google Scholar] [CrossRef]
- Wang, X.; Wang, B.; Pinskier, J.; Xie, Y.; Brett, J.; Scalzo, R.; Howard, D. Fin-bayes: A multi-objective Bayesian optimization framework for soft robotic fingers. Soft Robot. 2024. [Google Scholar] [CrossRef] [PubMed]
- Wu, T.; Liu, Z.; Wang, B.; Ma, Z.; Ma, D.; Deng, X. A versatile topology-optimized compliant actuator for soft robotic gripper and walking robot. Soft Robot. 2024, 11, 157–170. [Google Scholar] [CrossRef] [PubMed]
- Jain, S.; Dontu, S.; Teoh, J.E.M.; Alvarado, P.V.Y. A multimodal, reconfigurable workspace soft gripper for advanced grasping tasks. Soft Robot. 2023, 10, 527–544. [Google Scholar] [CrossRef] [PubMed]
- Liu, C.-H.; Chen, L.-J.; Chi, J.-C.; Wu, J.-Y. Topology optimization design and experiment of a soft pneumatic bending actuator for grasping applications. IEEE Robot. Autom. Lett. 2022, 7, 2086–2093. [Google Scholar] [CrossRef]
- Suder, J.; Bobovský, Z.; Mlotek, J.; Vocetka, M.; Oščádal, P.; Zeman, Z. Structural optimization method of a FinRay finger for the best wrapping of object. Appl. Sci. 2021, 11, 3858. [Google Scholar] [CrossRef]
- Tian, J.; Zhao, X.; Gu, X.D.; Chen, S. Designing Ferromagnetic Soft Robots (FerroSoRo) with level-set-based multiphysics topology optimization. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 10067–10074. [Google Scholar] [CrossRef]
- Zolfagharian, A.; Denk, M.; Bodaghi, M.; Kouzani, A.Z.; Kaynak, A. Topology-optimized 4D printing of a soft actuator. Acta Mech. Solida Sin. 2020, 33, 418–430. [Google Scholar] [CrossRef]
- Cao, L.; Dolovich, A.T.; Chen, A.; Zhang, W. Topology optimization of efficient and strong hybrid compliant mechanisms using a mixed mesh of beams and flexure hinges with strength control. Mech. Mach. Theory 2018, 121, 213–227. [Google Scholar] [CrossRef]
- Cao, L.; Dolovich, A.T.; Schwab, A.L.; Herder, J.L.; Zhang, W. Toward a Unified Design Approach for Both Compliant Mechanisms and Rigid-Body Mechanisms: Module Optimization. ASME J. Mech. Des. 2015, 137, 122301. [Google Scholar] [CrossRef]
- Cao, L.; Dolovich, A.; and Zhang, W.J. On the understanding of design problem formulation for compliant mechanisms through topology optimization. Mech. Sci. 2013, 4, 357–369. [Google Scholar] [CrossRef]
- Zhang, H.; Kumar, A.S.; Chen, F.; Fuh, J.Y.H.; Wang, M.Y. Topology Optimized Multimaterial Soft Fingers for Applications on Grippers, Rehabilitation, and Artificial Hands. IEEE/ASME Trans. Mechatron. 2019, 24, 120–131. [Google Scholar] [CrossRef]
- Zhang, H.; Kumar, A.S.; Fuh, J.Y.H.; Wang, M.Y. Design and Development of a Topology-Optimized Three-Dimensional Printed Soft Gripper. Soft Robot. 2018, 5, 650–661. [Google Scholar] [CrossRef] [PubMed]
- Zhang, H.; Kumar, A.S.; Fuh, J.Y.H.; Wang, M.Y. Investigation on Developing a Topology Optimized and 3D Printable Multi-material Soft Gripper. In Proceedings of the 2018 IEEE 14th International Conference on Control and Automation (ICCA), Anchorage, AK, USA, 12–15 June 2018; pp. 692–697. [Google Scholar] [CrossRef]
- Liu, C.H.; Chen, T.L.; Chiu, C.H.; Hsu, M.C.; Chen, Y.; Pai, T.Y.; Peng, W.G.; Chiang, Y.P. Optimal design of a soft robotic gripper for grasping unknown objects. Soft Robot. 2018, 5, 452–465. [Google Scholar] [CrossRef] [PubMed]
- Zhang, H.; Wang, M.Y.; Chen, F.; Wang, Y.; Kumar, A.S.; Fuh, J.Y.H. Design and development of a soft gripper with topology optimization. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 6239–6244. [Google Scholar] [CrossRef]
- Pinskier, J.; Wang, X.; Liow, L.; Xie, Y.; Kumar, P.; Langelaar, M.; Howard, D. Diversity-Based Topology Optimization of Soft Robotic Grippers. Adv. Intell. Syst. 2024, 6, 2300505. [Google Scholar] [CrossRef]
- Zhang, H.; Kumar, A.S.; Fuh, J.Y.H.; Wang, M.Y. Topology optimized design, fabrication, and evaluation of a multimaterial soft gripper. In Proceedings of the 2018 IEEE International Conference on Soft Robotics (RoboSoft), Livorno, Italy, 24–28 April 2018; pp. 424–430. [Google Scholar] [CrossRef]
- Chen, S.; Chen, F.; Cao, Z.; Wang, Y.; Miao, Y.; Gu, G.; Zhu, X. Topology optimization of skeleton-reinforced soft pneumatic actuators for desired motions. IEEE/ASME Trans. Mechatron. 2021, 26, 1745–1753. [Google Scholar] [CrossRef]
- Sun, Y.; Liu, Y.; Zhou, N.; Lueth, T.C. A MATLAB-Based Framework for Designing 3D Topology Optimized Soft Robotic Grippers. In Proceedings of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), Delft, The Netherlands, 12–16 July 2021; pp. 1283–1289. [Google Scholar] [CrossRef]
- Lehman, J.; Clune, J.; Misevic, D.; Adami, C.; Altenberg, L.; Beaulieu, J.; Bentley, P.J.; Bernard, S.; Beslon, G.; Bryson, D.M.; et al. The surprising creativity of digital evolution: A collection of anecdotes from the evolutionary computation and artificial life research communities. Artif. Life 2020, 26, 274–306. [Google Scholar] [CrossRef] [PubMed]
- Ogawa, J. Evolutionary multi-objective optimization for evolving soft robots in different environments. In Bio-Inspired Information and Communication Technologies: 11th EAI International Conference; Springer International Publishing: Cham, Switzerland, 2019; Volume 11, pp. 112–131. [Google Scholar]
- Nematollahi, M.A.; Hasanshahi, B.; Eftekhari, M.; Safavi, A.A. Material properties identification of a piezoelectric beam using inverse method. In Bio-Inspired Information and Communication Technologies: 11th EAI International Conference; Springer International Publishing: Cham, Switzerland, 2020; Volume 234, pp. 1351–1365. [Google Scholar] [CrossRef]
- Ogawa, J.; Mori, T.; Watanabe, Y.; Kawakami, M.; Shiblee, M.N.I.; Furukawa, H. MORI-A: Soft vacuum-actuated module with 3D-printable deformation structure. IEEE Robot. Autom. Lett. 2022, 7, 2495–2502. [Google Scholar] [CrossRef]
- Lee, J.Y.; Kim, W.B.; Choi, W.Y.; Cho, K.J. Soft robotic blocks: Introducing SoBL, a fast-build modularized design block. IEEE Robot. Autom. Mag. 2016, 23, 30–41. [Google Scholar] [CrossRef]
- Kriegman, S.; Nasab, A.M.; Shah, D.; Steele, H.; Branin, G.; Levin, M.; Bongard, J.; Kramer-Bottiglio, R. Scalable sim-to-real transfer of soft robot designs. In Proceedings of the 3rd IEEE International Conference on Soft Robotics (RoboSoft), New Haven, CT, USA, 15 May–15 July 2020; pp. 359–366. [Google Scholar]
- Legrand, J.; Terryn, S.; Roels, E.; Vanderborght, B. Reconfigurable, multi-material, voxel-based soft robots. IEEE Robot. Autom. Lett. 2023, 8, 1255–1262. [Google Scholar] [CrossRef]
- Lee, J.Y.; Eom, J.; Choi, W.Y.; Cho, K.J. Soft LEGO: Bottom-up design platform for soft robotics. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 7513–7520. [Google Scholar] [CrossRef]
- Chiou, S.J.; Sridhar, K. Automated conceptual design of mechanisms. Mech. Mach. Theory 1999, 34, 467–495. [Google Scholar] [CrossRef]
- Miao, Y.; Chen, F. Shape Optimization of Soft Pneumatic Bellows for High Energy Density. In Proceedings of the 27th International Conference on Mechatronics and Machine Vision in Practice (M2VIP), Shanghai, China, 26–28 November 2021; pp. 480–485. [Google Scholar] [CrossRef]
- Lyu, F.; Li, M.; Guo, J.; Guo, S. A New Fabrication Method for Soft Pneumatic Actuators based on Paraffin. In Proceedings of the IEEE International Conference on Mechatronics and Automation (ICMA), Guilin, China, 7–10 August 2022; pp. 340–344. [Google Scholar] [CrossRef]
- Scharff, R.B.N.; Fang, G.; Tian, Y.; Wu, J.; Geraedts, J.M.P.; Wang, C.C.L. Sensing and Reconstruction of 3-D Deformation on Pneumatic Soft Robots. IEEE/ASME Trans. Mechatron. 2021, 26, 1877–1885. [Google Scholar] [CrossRef]
- Tirado, J.; Jørgensen, J.; Rafsanjani, A. Earthworm-inspired multimodal soft actuators. In Proceedings of the IEEE International Conference on Soft Robotics (RoboSoft), Singapore, 3–7 April 2023; pp. 1–6. [Google Scholar] [CrossRef]
- Wang, P.; Tang, Z.; Xin, W.; Xie, Z.; Guo, S.; Laschi, C. Design and Experimental Characterization of a Push-Pull Flexible Rod-Driven Soft-Bodied Robot. IEEE Robot. Autom. Lett. 2022, 7, 8933–8940. [Google Scholar] [CrossRef]
- Park, Y.J.; Ko, M.G.; Jamil, B.; Shin, J.; Rodrigue, H. Simple and Scalable Soft Actuation Through Coupled Inflatable Tubes. IEEE Access 2022, 10, 41993–42003. [Google Scholar] [CrossRef]
- Koh, J.-S.; Lee, D.-Y.; Cho, K.-J. Design of the shape memory alloy coil spring actuator for the soft deformable wheel robot. In Proceedings of the 9th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI), Daejeon, Republic of Korea, 26–28 November 2012; pp. 641–642. [Google Scholar] [CrossRef]
- Kanada, A.; Mashimo, T. Design and Experiments of Flexible Ultrasonic Motor Using a Coil Spring Slider. IEEE/ASME Trans. Mechatron. 2020, 25, 468–476. [Google Scholar] [CrossRef]
- Chaichaowarat, R.; Nishimura, S.; Krebs, H.I. Design and Modeling of a Variable-Stiffness Spring Mechanism for Impedance Modulation in Physical Human–Robot Interaction. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–5 June 2021; pp. 7052–7057. [Google Scholar] [CrossRef]
- Sun, Y.; Lueth, T.C. Design of 3D-Printed Continuum Robots Using Topology Optimized Compliant Joints. In Proceedings of the IEEE International Conference on Soft Robotics (RoboSoft), Singapore, 3–7 April 2023; pp. 1–6. [Google Scholar] [CrossRef]
- Garcia, M.; Pena, P.; Tekes, A.; Amiri Moghadam, A.A. Development of Novel Three-Dimensional Soft Parallel Robot. In Proceedings of the SoutheastCon, Atlanta, GA, USA, 10–13 March 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Yongrou, Z.; Da, W.; Xuefeng, Z.; Taobo, C.; Dan, H. A Kinematic Model for Soft Robot Based on Double Laminate Plate Theory. In Proceedings of the IEEE International Conference on Robotics and Biomimetics (ROBIO), Kuala Lumpur, Malaysia, 12–15 December 2018; pp. 600–605. [Google Scholar] [CrossRef]
- Jiang, Y.; Chen, F.; Aukes, D.M. Tunable Dynamic Walking via Soft Twisted Beam Vibration. IEEE Robot. Autom. Lett. 2023, 8, 1967–1974. [Google Scholar] [CrossRef]
- Li, S.; Stampfli, J.; Xu, H.; Malkin, E.; Diaz, E.V.; Rus, D.; Wood, R.J. A Vacuum-driven Origami “Magic-ball” Soft Gripper. In Proceedings of the International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 7401–7408. [Google Scholar] [CrossRef]
- Karimi, M.A.; Alizadehyazdi, V.; Jaeger, H.M.; Spenko, M. A Self-Reconfigurable Variable-Stiffness Soft Robot Based on Boundary-Constrained Modular Units. IEEE Trans. Robot. 2022, 38, 810–821. [Google Scholar] [CrossRef]
- Kremer, P.; Nohooji, H.R.; Sanchez-Lopez, J.L.; Voos, H. TRIGGER: A Lightweight Universal Jamming Gripper for Aerial Grasping. IEEE Access 2023, 11, 50098–50115. [Google Scholar] [CrossRef]
- Gariya, N.; Kumar, P.; Makkar, M. Experimental Study of a Soft Pneumatic Actuator for the Application of Robotic Gripper. In Proceedings of the 5th International Conference on Power, Control & Embedded Systems (ICPCES), Allahabad, India, 6–8 January 2023; pp. 1–4. [Google Scholar] [CrossRef]
- Glick, P.; Suresh, S.A.; Ruffatto, D.; Cutkosky, M.; Tolley, M.T.; Parness, A. A Soft Robotic Gripper with Gecko-Inspired Adhesive. IEEE Robot. Autom. Lett. 2018, 3, 903–910. [Google Scholar] [CrossRef]
- Drotman, D.; Ishida, M.; Jadhav, S.; Tolley, M.T. Application-Driven Design of Soft, 3-D Printed, Pneumatic Actuators with Bellows. IEEE/ASME Trans. Mechatron. 2019, 24, 78–87. [Google Scholar] [CrossRef]
- Lu, Q.; Mahtab, B.; Zhao, F.; Song, K.-Y.; Feng, Y. Bioinspiration to Robot Locomotion implementing 3D printed Foxtail Grass. In Proceedings of the IEEE International Conference on Robotics and Biomimetics (ROBIO), Sanya, China, 27–31 December 2021; pp. 69–73. [Google Scholar] [CrossRef]
- Oh, N.; Lee, J.-G.; Rodrigue, H. Torsional Pneumatic Actuator Based on Pre-Twisted Pneumatic Tubes for Soft Robotic Manipulators. IEEE/ASME Trans. Mechatron. 2023, 28, 3191–3201. [Google Scholar] [CrossRef]
- Dewapura, J.I.; Hemachandra, P.S.; Dananjaya, T.; Awantha, W.V.I.; Wanasinghe, A.T.; Kulasekera, A.L.; Chathuranga, D.S.; Dassanayake, V.P.C. Design and Development of a Novel Bio-inspired Worm-type Soft Robot for In-pipe Locomotion. In Proceedings of the 20th International Conference on Control, Automation and Systems (ICCAS), Busan, Republic of Korea, 13–16 October 2020; pp. 586–591. [Google Scholar] [CrossRef]
- Golgouneh, A.; Dunne, L.E. A review in on-body compression using soft actuators and sensors: Applications, mechanisms, and challenges. IEEE Rev. Biomed. Eng. 2024, 17, 166–179. [Google Scholar] [CrossRef] [PubMed]
- Hasanshahi, B.; Azadi, M. Active vibration control of a functionally graded carbon nanotube-reinforced composite beam subjected to follower force. Iran. J. Sci. Technol. Trans. Mech. Eng. 2019, 43 (Suppl. S1), 25–35. [Google Scholar] [CrossRef]
- Shu, J.; Wang, J.; Su, Y.; Liu, H.; Li, Z.; Tong, R.K.-Y. An end-to-end posture perception method for soft bending actuators based on kirigami-inspired piezoresistive sensors. In Proceedings of the IEEE-EMBS International Conference on Wearable and Implantable Body Sensor Networks (BSN), Ioannina, Greece, 27–30 September 2022; pp. 1–5. [Google Scholar] [CrossRef]
- Shepherd, R.F.; Ilievski, F.; Choi, W.; Morin, S.A.; Stokes, A.A.; Mazzeo, A.D.; Chen, X.; Wang, M.; Whitesides, G.M. Multigait soft robot. Proc. Natl. Acad. Sci. USA 2011, 108, 20400–20403. [Google Scholar] [CrossRef] [PubMed]
- Chirikjian, G.S.; Burdick, J.W. The kinematics of hyper-redundant robot locomotion. IEEE Trans. Robot. Autom. 1995, 11, 781–793. [Google Scholar] [CrossRef]
- Zheng, T.; Branson, D.T.; Kang, R.; Cianchetti, M.; Guglielmino, E.; Follador, M.; Medrano-Cerda, G.A.; Godage, I.S.; Caldwell, D.G. Dynamic continuum arm model for use with underwater robotic manipulators inspired by octopus vulgaris. In Proceedings of the IEEE International Conference on Robotics and Automation, Saint Paul, MN, USA, 14–18 May 2012; pp. 5289–5294. [Google Scholar] [CrossRef]
- Rucker, D.C.; Jones, B.A.; Webster, R.J., III. A Geometrically Exact Model for Externally Loaded Concentric-Tube Continuum Robots. IEEE Trans. Robot. 2010, 26, 769–780. [Google Scholar] [CrossRef] [PubMed]
- Ferrentino, P.; Roels, E.; Brancart, J.; Terryn, S.; Van Assche, G.; Vanderborght, B. Finite Element Analysis-Based Soft Robotic Modeling: Simulating a Soft Actuator in SOFA. IEEE Robot. Autom. Mag. 2023, 2–12. [Google Scholar] [CrossRef]
- Schegg, P.; Ménager, E.; Khairallah, E.; Marchal, D.; Dequidt, J.; Preux, P.; Duriez, C. SofaGym: An Open Platform for Reinforcement Learning Based on Soft Robot Simulations. Soft Robot. 2023, 10, 410–430. [Google Scholar] [CrossRef] [PubMed]
- Duriez, C.; Coevoet, E.; Largilliere, F.; Morales-Bieze, T.; Zhang, Z.; Sanz-Lopez, M.; Carrez, B.; Marchal, D.; Goury, O.; Dequidt, J. Framework for online simulation of soft robots with optimization-based inverse model. In Proceedings of the IEEE International Conference on Simulation, Modeling, and Programming for Autonomous Robots (SIMPAR), San Francisco, CA, USA, 13–16 December 2016; pp. 111–118. [Google Scholar] [CrossRef]
- Ferigo, A.; Iacca, G.; Medvet, E.; Pigozzi, F. Evolving Hebbian Learning Rules in Voxel-Based Soft Robots. IEEE Trans. Cogn. Dev. Syst. 2023, 15, 1536–1546. [Google Scholar] [CrossRef]
- Khodambashi, R.; Berman, S.; He, X.; Aukes, D.M. Miniaturized Untethered Soft Robots Using Hydrogel-based Soft Voxel Actuators. In Proceedings of the IEEE 4th International Conference on Soft Robotics (RoboSoft), New Haven, CT, USA, 12–16 April 2021; pp. 571–574. [Google Scholar] [CrossRef]
- Hiller, J.; Lipson, H. Automatic Design and Manufacture of Soft Robots. IEEE Trans. Robot. 2012, 28, 457–466. [Google Scholar] [CrossRef]
- Liang, L.; Meng, L.; Ma, H. Design, Characterization, and Optimization of the Soft Bellows Pneumatic Actuator. In Proceedings of the IEEE International Conference on Mechatronics and Automation (ICMA), Harbin, China, 6–9 August 2023; pp. 331–335. [Google Scholar] [CrossRef]
- Barreto, P.S.; Pinto, M.F.; Pereira, G.D.; Batista, J.L.; Carneiro, D.M.M.O.; Dias, J.T.; Almeida, L.F. Low-Cost Fish-Based Soft Robot Development for Underwater Environment. In Proceedings of the 15th IEEE International Conference on Industry Applications (INDUSCON), São Bernardo do Campo, Brazil, 22–24 November 2023; pp. 1672–1677. [Google Scholar] [CrossRef]
- Cabrera, M.; Van Liew, J.; Turoski, N.; Baysa, M.; Han, Y.-L. Utilizing Computational Modeling to Aid the Development of a Wearable Soft Robot for Finger Rehabilitation. In Proceedings of the International Conference on Advanced Mechatronic Systems (ICAMechS), Toyama, Japan, 17–20 December 2022; pp. 10–15. [Google Scholar] [CrossRef]
- Fahim, J.K.; Faried, A.M.; Shehata, O.M.; Morgan, E.I. Development and Control of an Enhanced Active Compliance based Soft Pneumatically Actuated Robotic Hand. In Proceedings of the 8th International Conference on Control, Mechatronics and Automation (ICCMA), Moscow, Russia, 6–8 November 2020; pp. 1–5. [Google Scholar] [CrossRef]
- Salem, M.E.M.; Wang, Q.; Wen, R.; Xiang, M. Design and Characterization of Soft Pneumatic Actuator for Universal Robot Gripper. In Proceedings of the International Conference on Control and Robots (ICCR), Hong Kong, China, 15–17 September 2018; pp. 6–10. [Google Scholar] [CrossRef]
- Amala, E.G.; Lal Priya, P.S. Bending Deformation Relation with Various Materials for a Soft Pneumatic Actuator. In Proceedings of the Emerging Trends in Industry 4.0 (ETI 4.0), Raigarh, India, 19–21 May 2021; pp. 1–5. [Google Scholar] [CrossRef]
- Xavier, M.S.; Tawk, C.D.; Zolfagharian, A.; Pinskier, J.; Howard, D.; Young, T.; Lai, J.; Harrison, S.M.; Yong, Y.K.; Bodaghi, M.; et al. Soft Pneumatic Actuators: A Review of Design, Fabrication, Modeling, Sensing, Control and Applications. IEEE Access 2022, 10, 59442–59485. [Google Scholar] [CrossRef]
- Wandke, K.; Z., Y. MOOSE-Based Finite Element Hyper Elastic Modeling for Soft Robot Simulations. IEEE Access 2021, 9, 139627–139635. [Google Scholar] [CrossRef]
- Tony, A.; Rasouli, A.; Farahinia, A.; Wells, G.; Zhang, H.; Achenbach, S.; Yang, S.M.; Sun, W.; Zhang, W. Toward a Soft Microfluidic System: Concept and Preliminary Developments. In Proceedings of the 27th International Conference on Mechatronics and Machine Vision in Practice (M2VIP), Shanghai, China, 26–28 November 2021; pp. 755–759. [Google Scholar] [CrossRef]
- Alam, W.; Mehmood, A.; Ali, K.; Javaid, U.; Alharbi, S.; Iqbal, J. Nonlinear Control of a Flexible Joint Robotic Manipulator with Experimental Validation. Stroj. Vestn. J. Mech. Eng. 2018, 64, 47–55. [Google Scholar] [CrossRef]
- Alam, W.; Ahmad, S.; Mehmood, A.; Iqbal, J. Robust sliding mode control for flexible joint robotic manipulator via disturbance observer. Interdiscip. Descrip. Comp. Syst. 2019, 17, 85–97. [Google Scholar] [CrossRef]



















Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).