


Dual-Arm Obstacle Avoidance Motion Planning Based on Improved RRT Algorithm

Abstract
1. Introduction
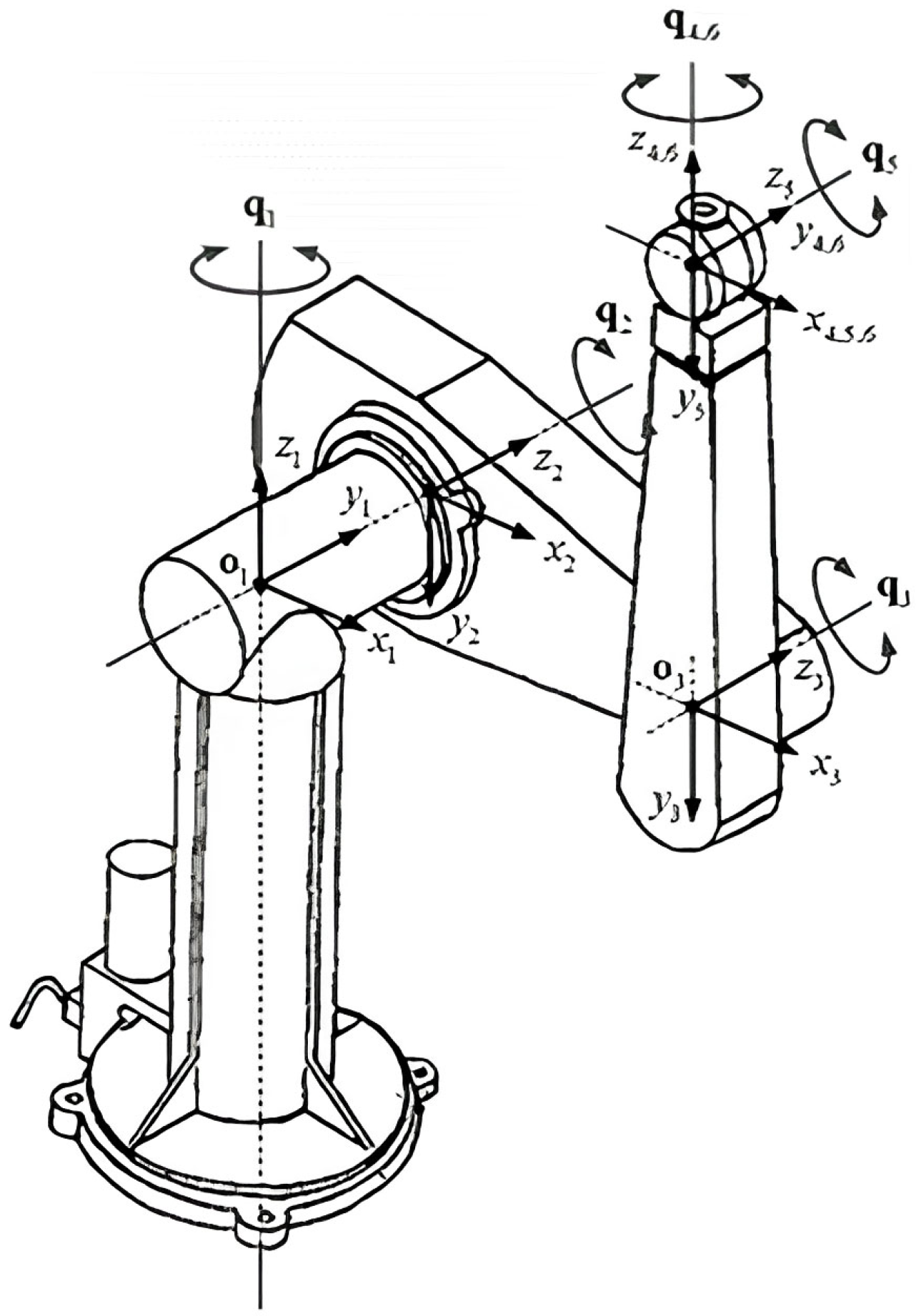
2. Kinematic Modeling of Dual Robotic Arms
- Multiple Solution Problem: The presence of various joint angle solutions for a given end-effector position and orientation complicates the selection of the optimal or most suitable solution, leading to ambiguity [15];
- Singular Solution Problem: Certain configurations of the robotic arm can result in singularity issues, where the position and orientation of the end-effector cannot be uniquely determined at specific joint angles [16];
- Numerical Instability Problem: Solving inverse kinematics involves numerical computations and optimization methods. Numerical stability is crucial; errors or instabilities in computation can affect the accuracy and reliability of the solution and may cause instability in the robotic arm’s movements [17];
- High Computational Complexity: Inverse kinematics solutions typically require complex mathematical calculations and algorithms. This is particularly true for high-degree-of-freedom robotic arms or complex tasks, leading to a time-consuming solution process [18].
3. Improved RRT Algorithm
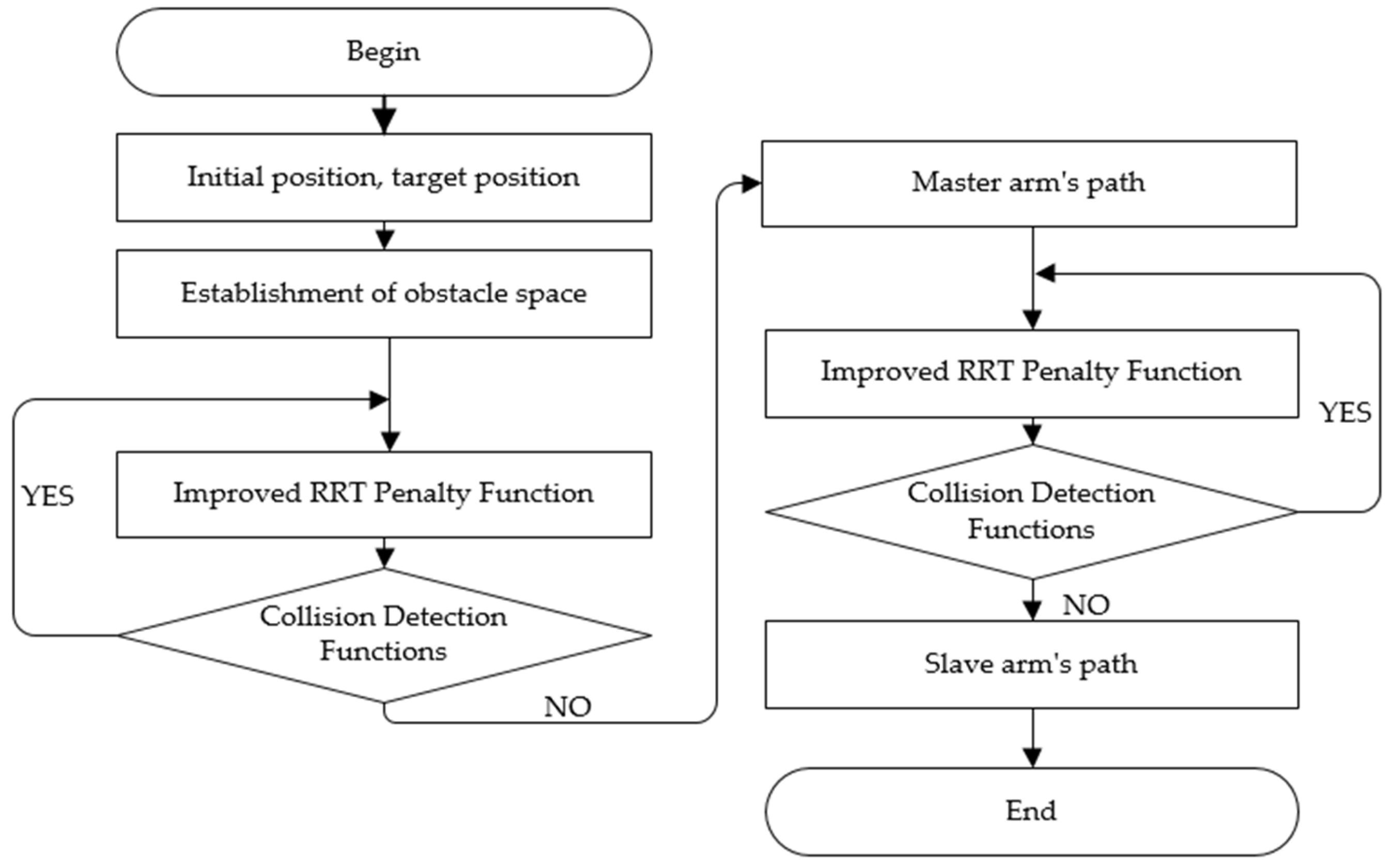
3.1. Dual-Arm Path Planning Based on the Improved RRT Algorithm
3.2. Obstacle Generation Function
3.3. Improved Penalty Function for the RRT Algorithm
- (1)
- Select a random joint from the 6 joints of the robotic arm, such as joint 2, and set the algorithm step size to 5°;
- (2)
- Within the interval [−90°, 90°], randomly select an angle in 5° increments. If the angle is positive, rotate 5° clockwise; if the angle is negative, rotate 5° counterclockwise. Assume a positive angle is randomly selected;
- (3)
- Rotate joint 2 clockwise by 5° from its initial angle (angle 1), designating this new position as angle 2 for the child node in the random tree, with angle 1 noted as its parent node;
- (4)
- Randomly choose another joint from the 6 joints, for example, joint 3;
- (5)
- Within the interval [−90°, 90°], randomly select an angle, such as 30°;
- (6)
- Rotate joint 3 clockwise by 5° from the angle 2 of the child node in the random tree, assigning this as angle 1;
- (7)
- Define the cost function;
- (8)
- If the cost function value for angle 2 of the random tree’s child node is minimal, then rotate joint 3 clockwise by 5° from angle 2 of the random tree’s child node, designating it as angle 3;
- (9)
- Achieve rapid convergence;
- (10)
- Utilize the Robotics Toolbox function to map angles to positions for the 6 joints;
- (11)
- Implement the collisionRobot function to prevent collisions between the master arm and obstacles;
- (12)
- Repeat the above steps until the distance between the new node and the target node is within the specified error range, terminating the loop at this point;
- (13)
- Make fine adjustments to the final end position to precisely reach the target location.
| Algorithm 1. ImprovedTreeRobot |
| Function1: ImprovedTreeRobot |
| , max_iterations |
| # Initialize an empty pose x and an empty node P x = None P = None # Initialize iterations to keep track of iteration counts iterations = 0 is the end position of the robot arm at the start do ) using forward kinematics ) if iterations < max_iterations do # Calculate the cost C that minimizes C ) ) ) else # Similarly, calculate the cost C , n) that minimizes C respectively ) ) ) end # If a collision is detected, generate a new random node if CollisionCheck(x) == 1 then GenerateRand() else to their respective node sets = S = P # Add iterations iterations = iterations + 1 end ) end do ) end |
3.4. Collision Detection Function
| Algorithm 2. collisonRobot |
| Function2: collisonRobot |
| ), obstacle |
| ) |
| indicates the position of the 6 joints #Example of the first rod’s collision avoidance |
| = , = , = |
| #r is the radius of the obstacle sphere, c is the center coordinate of the obstacle sphere |
| if |||| < 1.2r and |||| < 1.2r and |||| < 1.2r |
| then during the collision detection process |
| ) = 1 |
| end |
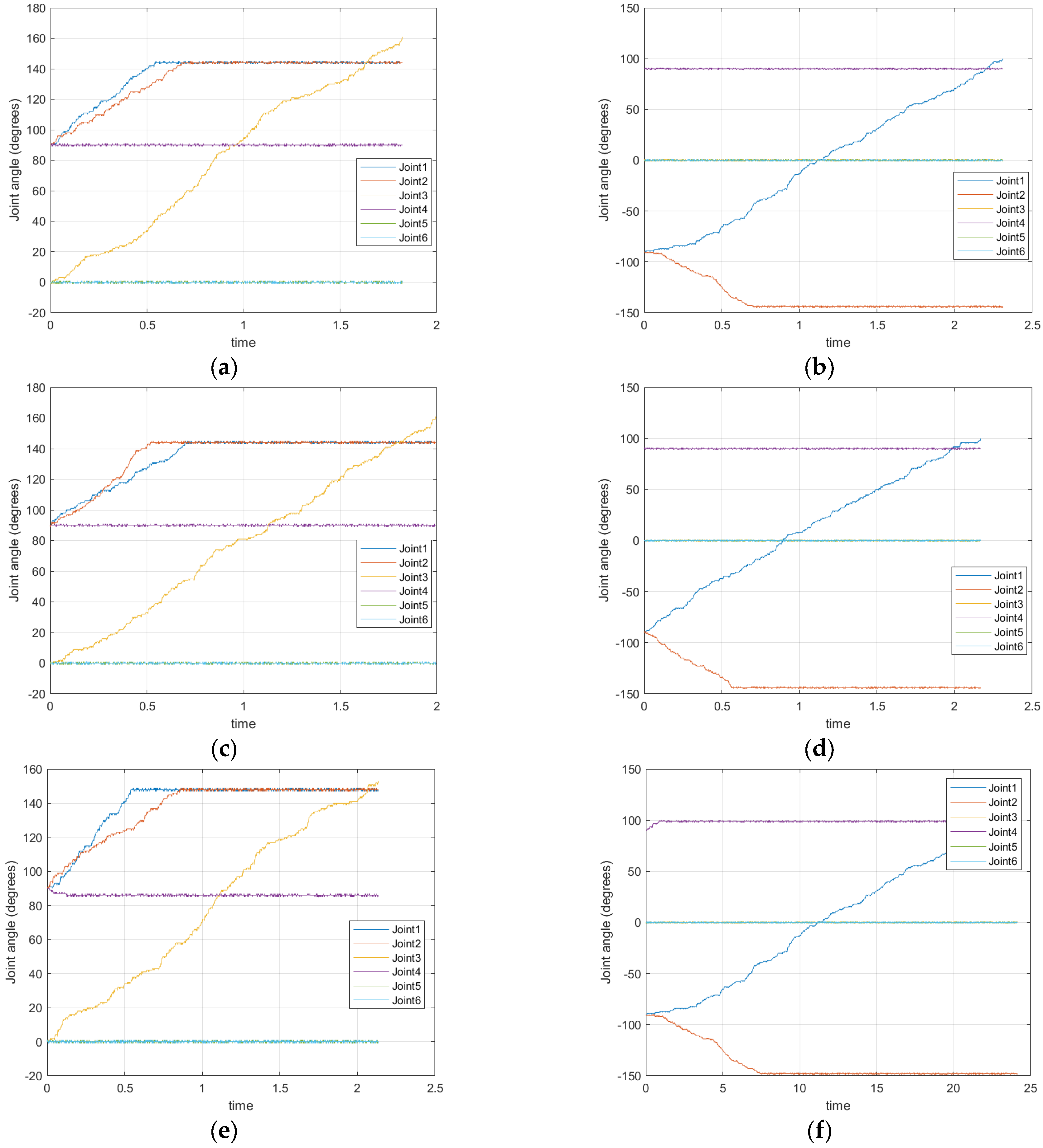
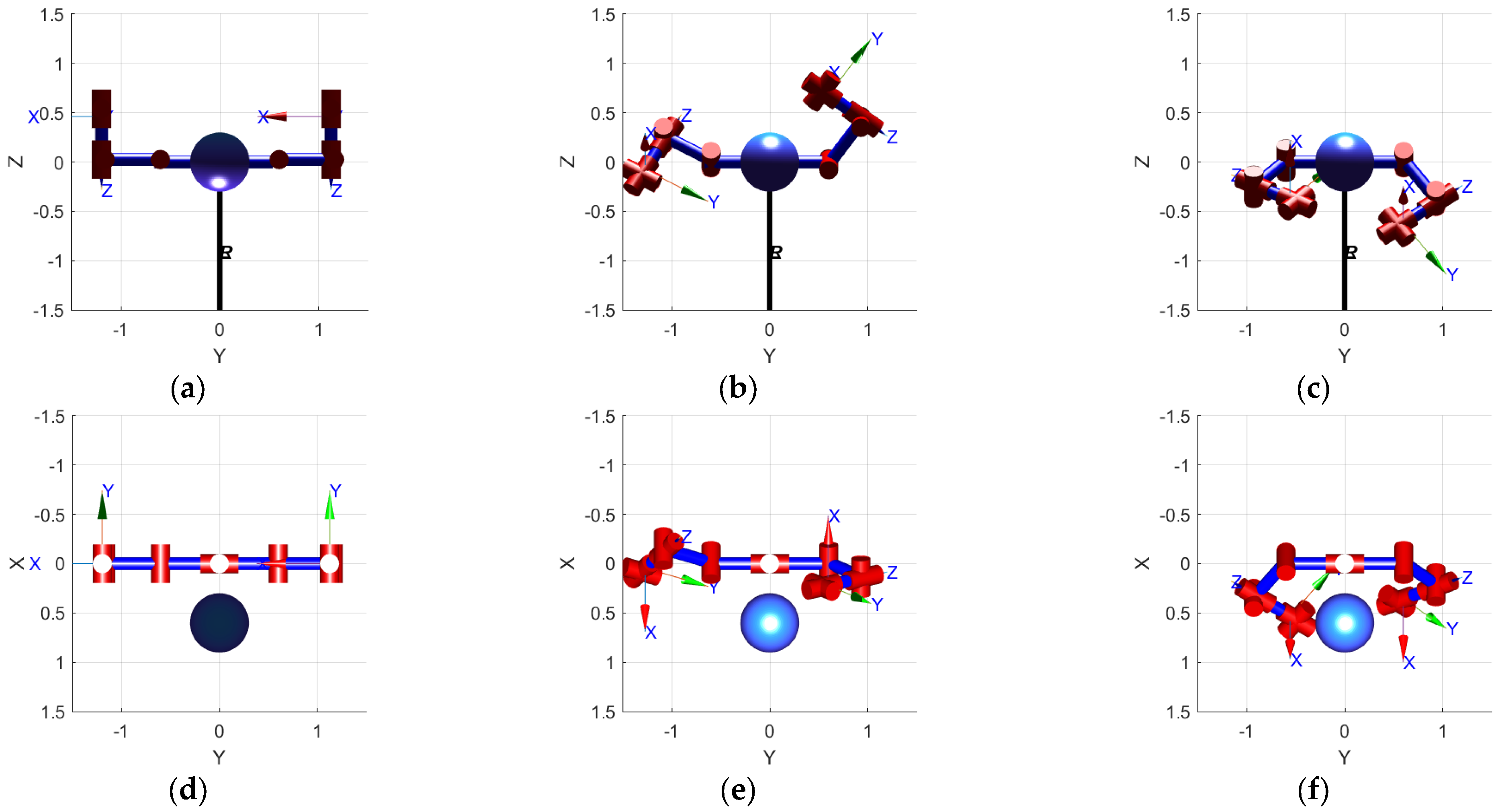
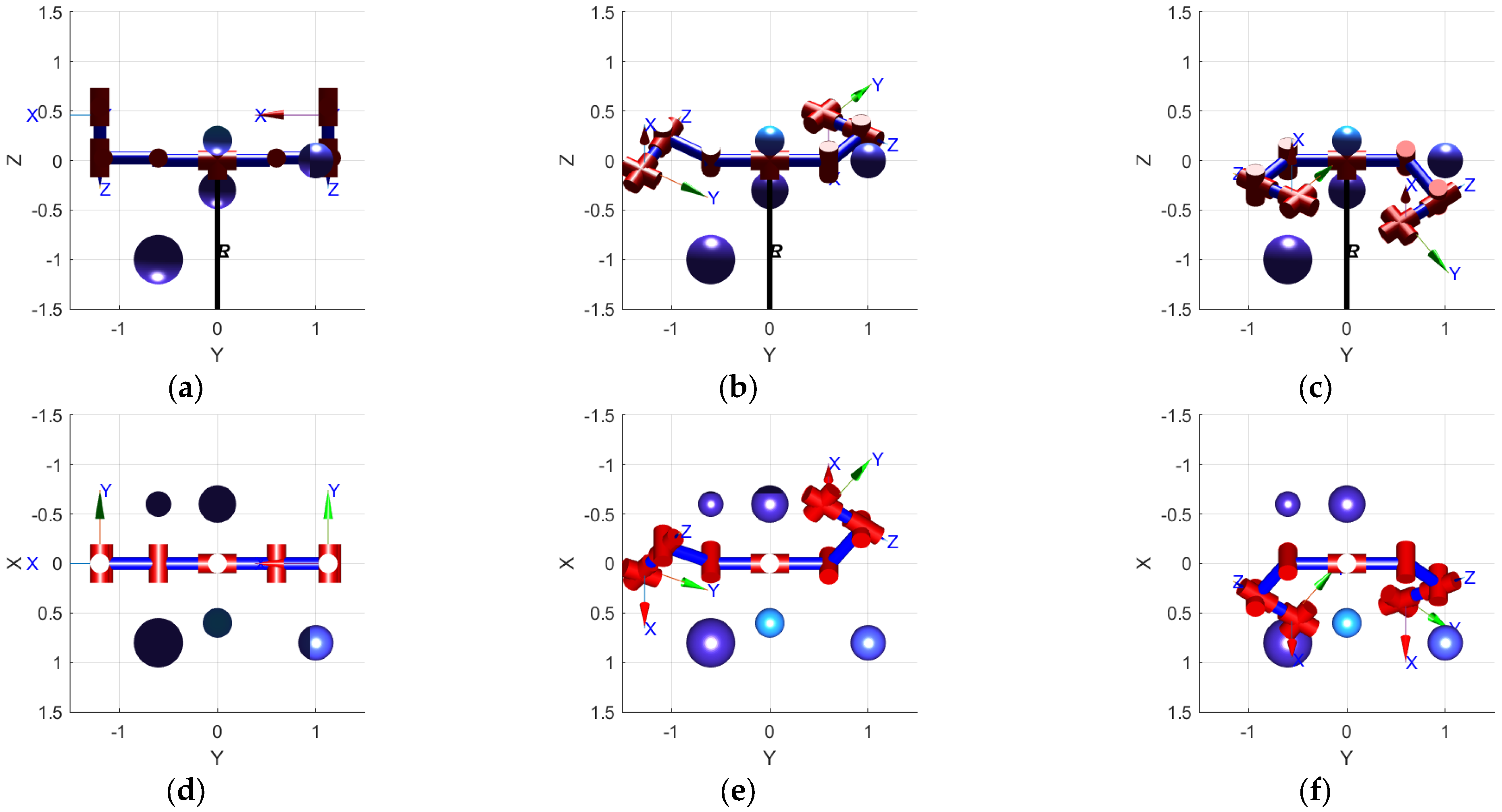
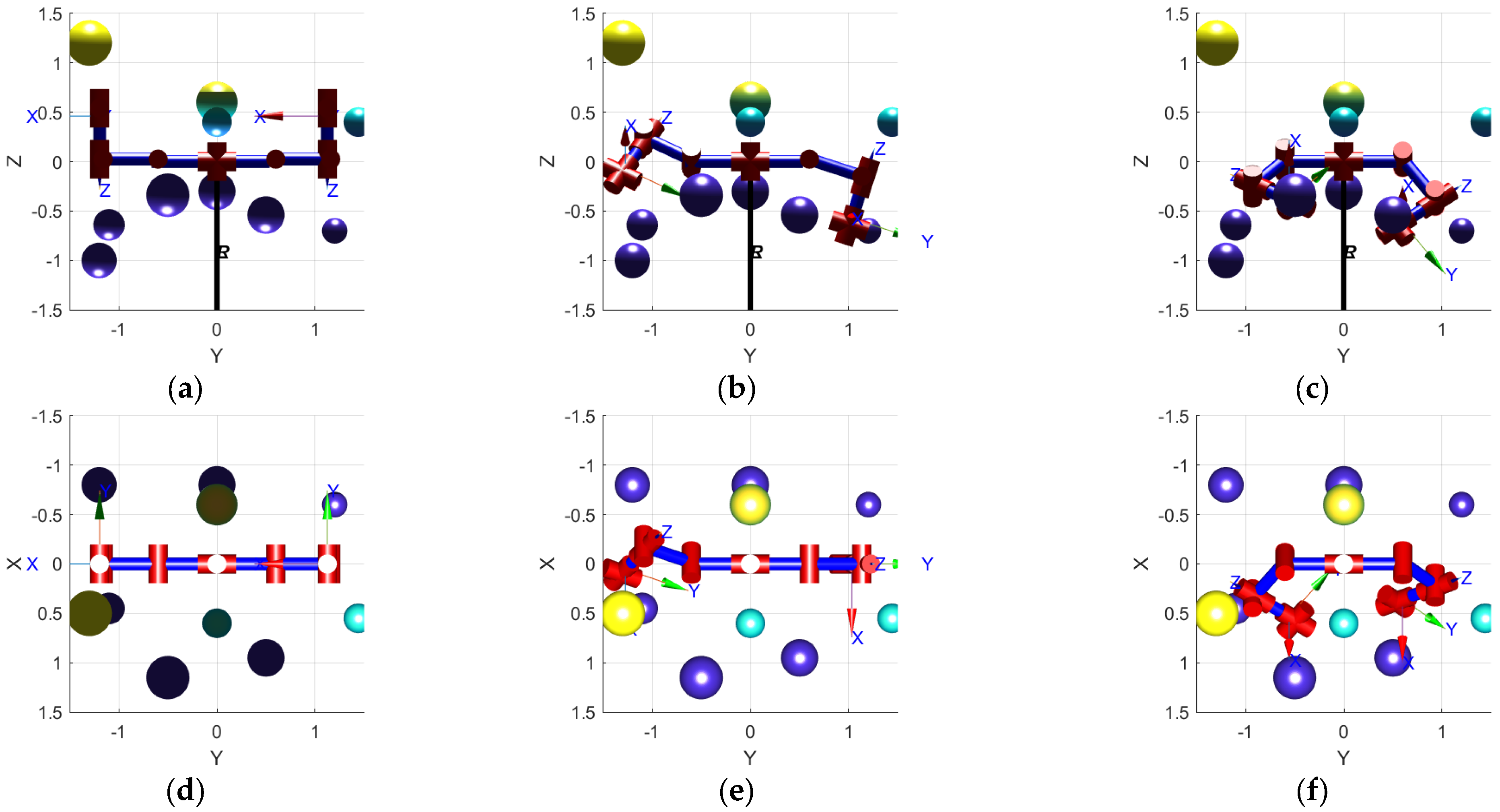
4. Simulation Experiment
5. Discussion
6. Conclusions
- The improved RRT algorithm proposed in this study exhibits outstanding experimental results in dual-arm collision avoidance trajectory planning. Extensive experiments confirm that the algorithm achieves high planning speed and success rates in handling trajectory planning amid numerous obstacles;
- To address the inherent path roughness of the improved RRT algorithm, path smoothing is achieved through interpolation and an increased number of nodes. This refinement significantly enhances the smoothness of the generated trajectories;
- To tackle challenges associated with multi-solution, singularities, and computational complexity in robot inverse kinematics, this study advocates using robot forward kinematics for trajectory planning, thereby improving computational efficiency;
- By employing a master-slave coordinated control approach, obstacle avoidance planning begins with the master arm. Subsequently, the slave arm leverages the trajectory of the master arm (left arm) for obstacle avoidance path planning;
- The effectiveness and feasibility of the algorithm are validated through numerical simulations using the Robotics Toolbox in MATLAB as part of the experimental methodology.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Anh, T.L.; Phuc, H.Q. Adaptive fractional-order integral fast terminal sliding mode and fault-tolerant control of dual-arm robots. Robotica 2024, 42, 1476–1499. [Google Scholar]
- Ge, J.; Kam, M.; Opfermann, J.D.; Saeidi, H.; Leonard, S.; Mady, L.J.; Schnermann, M.J.; Krieger, A. Autonomous System for Tumor Resection (ASTR)—Dual-Arm Robotic Midline Partial Glossectomy. IEEE Robot. Autom. Lett. 2024, 9, 1166–1173. [Google Scholar] [CrossRef] [PubMed]
- Long, H.; Li, G.; Zhou, F.; Chen, T. Cooperative Dynamic Motion Planning for Dual Manipulator Arms Based on RRT*Smart-AD Algorithm. Sensors 2023, 23, 7759. [Google Scholar] [CrossRef] [PubMed]
- Marco, R.; Matthieu, J.; Marco, S.; Alessandra, A.; Cesare, M. Collision-free and smooth motion planning of dual-arm Cartesian robot based on B-spline representation. Robot. Auton. Syst. 2023, 170, 104534. [Google Scholar]
- Petit, L.; Desbiens, A.L. RRT-Rope: A deterministic shortening approach for fast near-optimal path planning in large-scale uncluttered 3D environments. In Proceedings of the 2021 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Melbourne, Australia, 17–20 October 2021; pp. 1111–1118. [Google Scholar]
- Xanthidis, M.; Esposito, J.M.; Rekleitis, I.; O’Kane, J.M. Motion planning by sampling in subspaces of progressively increasing dimension. J. Intell. Robot. Syst. 2020, 100, 777–789. [Google Scholar] [CrossRef]
- Gammell, J.D.; Srinivasa, S.S.; Barfoot, T.D. Informed RRT*: Optimal sampling-based path planning focused via direct sampling of an admissible ellipsoidal heuristic. In Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014; pp. 2997–3004. [Google Scholar]
- Brunner, M.; Brüggemann, B.; Schulz, D. Hierarchical rough terrain motion planning using an optimal sampling-based method. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 5539–5544. [Google Scholar]
- Ranganathan, A.; Koenig, S. PDRRTs: Integrating graph-based and cell-based planning. In Proceedings of the 2004 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (IEEE Cat. No. 04CH37566), Sendai, Japan, 28 September–2 October 2004; pp. 2799–2806. [Google Scholar]
- Azita, A.; Babak, A.; Mojtaba, V. Self-Tuning Fuzzy Task Space Controller for Puma 560 Robot. J. Electr. Eng. Technol. 2020, 16, 579–589. [Google Scholar]
- Lavín-Delgado, J.E.; Solís-Pérez, J.E.; Gómez-Aguilar, J.F.; Escobar-Jiménez, R.F. Trajectory tracking control based on non-singular fractional derivatives for the PUMA 560 robot arm. Multibody Syst. Dyn. 2020, 50, 259–303. [Google Scholar] [CrossRef]
- Lin, W.; Yuefa, F.; Dan, Z.; Yi, Y. Kinematics and optimization of a novel 4-DOF two-limb gripper mechanism. Robotica 2023, 41, 3649–3671. [Google Scholar]
- Zhu, C.; Zhao, Z. Research on Influence of Joint Clearance on Precision of 3-TPT Parallel Robot. Mech. Sci. 2019, 10, 287–298. [Google Scholar] [CrossRef]
- Abbes, M.; Poisson, G. Geometric Approach for Inverse Kinematics of the FANUC CRX Collaborative Robot. Robotics 2024, 13, 91. [Google Scholar] [CrossRef]
- Jennifer, D.; Thorsteinn, R.; Bo, S.; Mattias, O. Deterministic annealing with Potts neurons for multi-robot routing. Intell. Serv. Robot. 2022, 15, 321–334. [Google Scholar]
- Polyakova, A.P.; Svetov, I.E. A numerical solution of the dynamic vector tomography problem using the truncated singular value decomposition method. J. Inverse Ill-Posed Probl. 2024, 32, 145–160. [Google Scholar] [CrossRef]
- Pan, V.Y.; Soleymani, F.; Zhao, L. An efficient computation of generalized inverse of a matrix. Appl. Math. Comput. 2018, 316, 89–101. [Google Scholar] [CrossRef]
- Guichao, L.; Peichen, H.; Minglong, W.; Yao, X.; Rihong, Z.; Lixue, Z. An Inverse Kinematics Solution for a Series-Parallel Hybrid Banana-Harvesting Robot Based on Deep Reinforcement Learning. Agronomy 2022, 12, 2157. [Google Scholar] [CrossRef]
- Cui, X.; Wang, C.; Xiong, Y.; Mei, L.; Wu, S. More Quickly-RRT*: Improved Quick Rapidly-exploring Random Tree Star algorithm based on optimized sampling point with better initial solution and convergence rate. Eng. Appl. Artif. Intell. 2024, 133, 108246. [Google Scholar] [CrossRef]
- Merckaert, K.; Convens, B.; Nicotra, M.M.; Vanderborght, B. Real-time constraint-based planning and control of robotic manipulators for safe human–robot collaboration. Robot. Comput.-Integr. Manuf. 2024, 87, 102711. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Link | θ (°) | d (mm) | a (mm) | α (°) |
|---|---|---|---|---|
| 1 | 0 | 600 | 25 | 90 |
| 2 | 90 | 0 | 56 | 0 |
| 3 | 0 | 0 | 35 | 90 |
| 4 | 0 | 515 | 0 | 90 |
| 5 | 180 | 0 | 0 | 90 |
| 6 | 0 | 80 | 0 | 0 |
| Master Arm | Slave Arm | |
|---|---|---|
| Starting point (mm) | [0, −125, 48] | [0, 125, 48] |
| Starting point (°) | [0, 0, 0, 0, 0, 0] | [0, 0, 0, 0, 0, 0] |
| Target point (mm) | [61, 63, 38] | [41, 68, 69] |
| Target point (°) | [144, 144, 160, 90, 0, 0] | [100, −144, 0, 90, 0, 0] |
| (mm) | 0.5 | 0.5 |
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | |
|---|---|---|---|---|---|---|---|---|---|---|
| Planning Time | 4.13 s | 4.16 s | 4.15 s | 4.18 s | 4.23 s | 4.62 s | 5.21 s | 5.39 s | 5.52 s | 5.75 s |
| Success Rate | 99.5% | 99.5% | 99.0% | 98.5% | 96.0% | 95.5% | 94.5% | 93.0% | 92.5% | 91.5% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dong, Z.; Zhong, B.; He, J.; Gao, Z. Dual-Arm Obstacle Avoidance Motion Planning Based on Improved RRT Algorithm. Machines 2024, 12, 472. https://doi.org/10.3390/machines12070472
Dong Z, Zhong B, He J, Gao Z. Dual-Arm Obstacle Avoidance Motion Planning Based on Improved RRT Algorithm. Machines. 2024; 12(7):472. https://doi.org/10.3390/machines12070472
Chicago/Turabian StyleDong, Zhe, Binrui Zhong, Jiahuan He, and Zhao Gao. 2024. "Dual-Arm Obstacle Avoidance Motion Planning Based on Improved RRT Algorithm" Machines 12, no. 7: 472. https://doi.org/10.3390/machines12070472
APA StyleDong, Z., Zhong, B., He, J., & Gao, Z. (2024). Dual-Arm Obstacle Avoidance Motion Planning Based on Improved RRT Algorithm. Machines, 12(7), 472. https://doi.org/10.3390/machines12070472