
The Development and Nonlinear Adaptive Robust Control of the Air Chamber Pressure Regulation System of a Slurry Pressure Balance Shield Tunneling Machine

Abstract
1. Introduction
- (1)
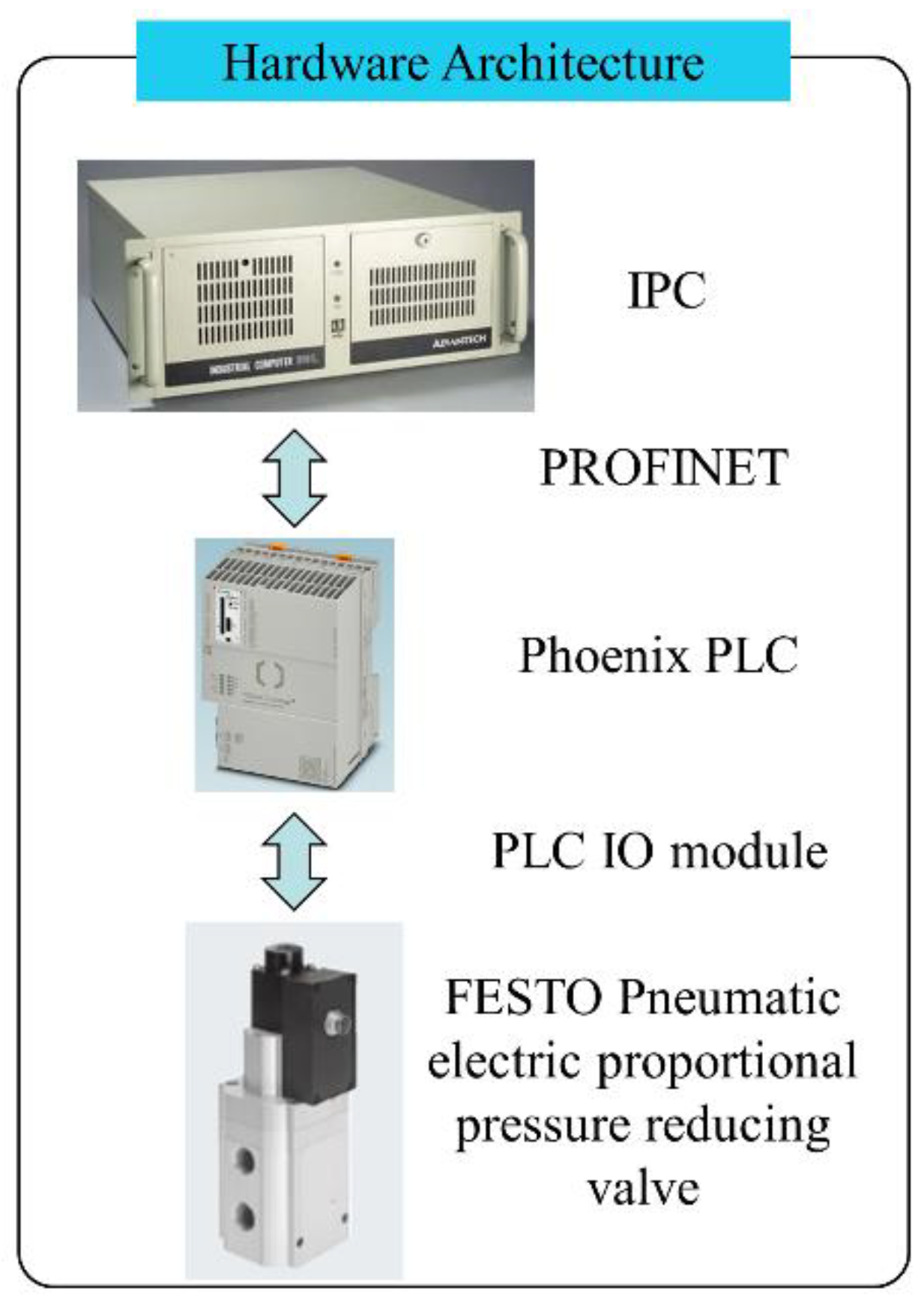
- An electric proportional air chamber pressure regulation system is developed using a pneumatic proportional three-way pressure-reducing valve. This system overcomes the shortcomings of traditional pressure regulation systems that use mechanical PID controllers in terms of control performance.
- (2)
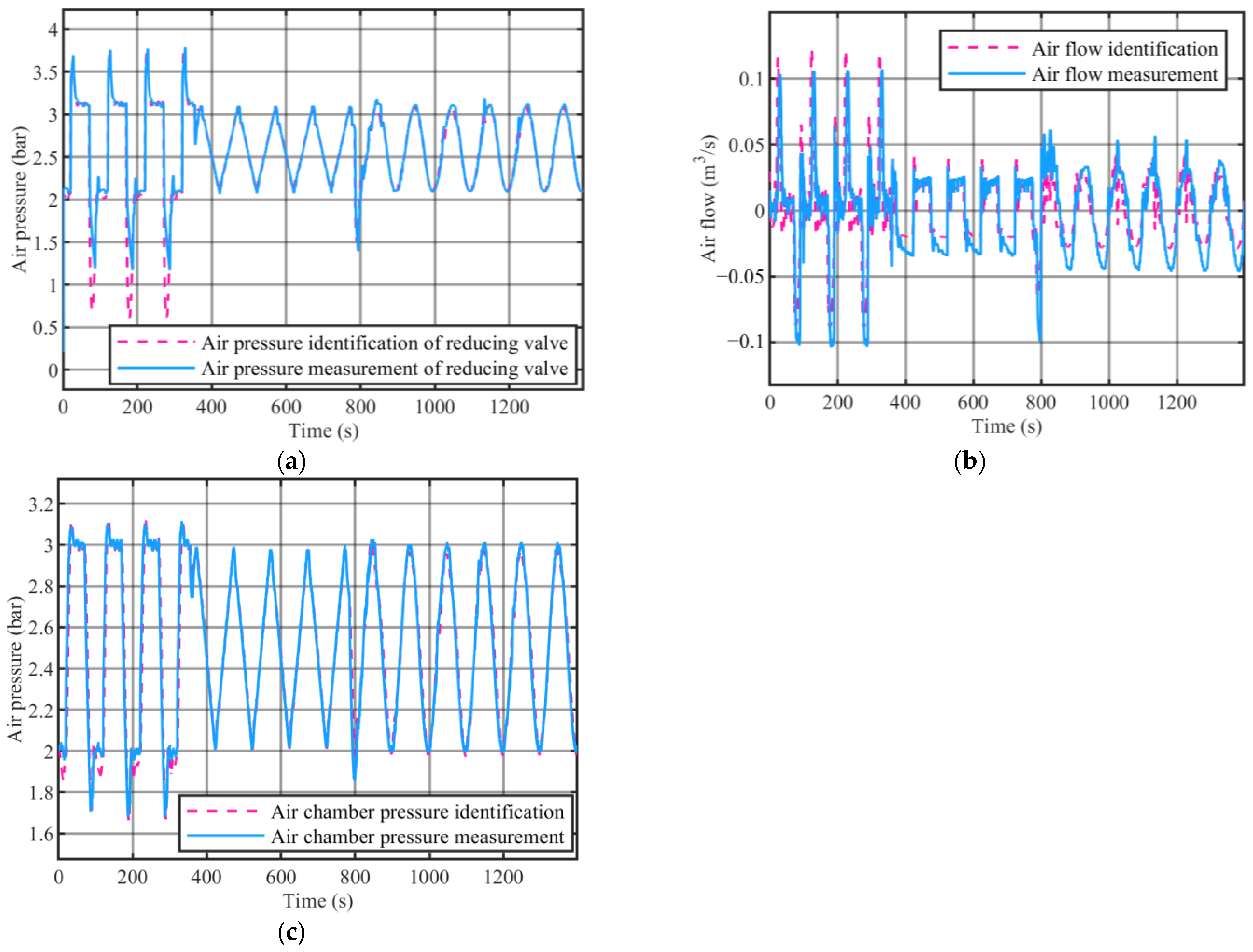
- A nonlinear state space model for the air chamber pressure regulation process is established. A nonlinear adaptive identification is performed based on the experimental data from the SPB shield tunneling machine test bench, verifying the model’s effectiveness and accuracy. This model reveals the mechanism of the air chamber pressure regulation process.
- (3)
- A nonlinear adaptive robust controller for air chamber pressure is proposed using the backstepping method, with its Lyapunov stability proven. The feasibility and effectiveness of the proposed controller are verified through simulation and experiment.
2. Development, Modeling, and Analysis of the Air Chamber Pressure Regulation Process
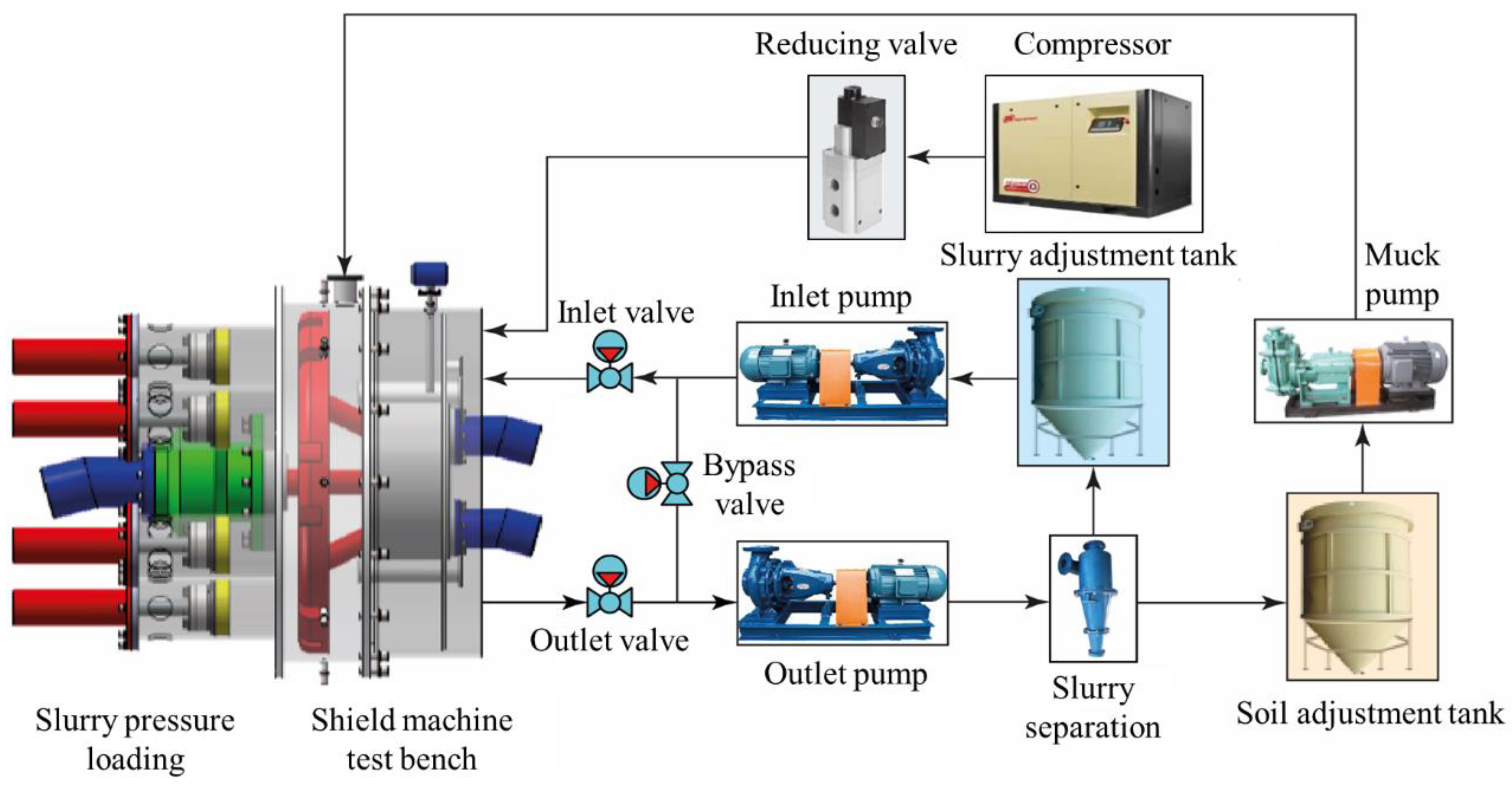
2.1. Development of Air Chamber Pressure Regulation System
2.2. Nonlinear Dynamic State Space Model
2.3. Model Analysis and Identification
- (1)
- The air chamber pressure is directly affected by both the slurry level and the flow rate of the pressure-reducing valve. Assuming the flow rate of the pressure-reducing valve is zero, the volume of the air chamber will decrease when the slurry level rises; thus, the air chamber pressure will increase. The volume of the air chamber will increase when the slurry level decreases; thus, the air chamber pressure will decrease. Assuming the slurry level remains constant, when the pressure-reducing valve flow rate is positive, i.e., when it flows into the air chamber, the compressed gas mass in the air chamber will increase and the air chamber pressure will increase; when the flow rate of the pressure-reducing valve is negative, i.e., when it flows out of the air chamber, the compressed gas mass in the air chamber will decrease and the air chamber pressure will decrease.
- (2)
- The flow rate of the pressure-reducing valve is directly affected by both the air chamber pressure and the pressure of the pilot stage of the pressure-reducing valve. Assuming that the pressure of the pilot stage of the pressure-reducing valve remains constant, when the air chamber pressure increases, it will cause the opening of the main valve spool of the pressure-reducing valve to decrease, thereby reducing the flow rate of the pressure-reducing valve; the decrease in air chamber pressure increases the opening of the main valve spool of the pressure-reducing valve, thereby increasing the flow rate of the pressure-reducing valve. Assuming that the air chamber pressure remains constant, the increase in pressure in the pilot stage of the pressure-reducing valve will push the main valve spool of the pressure-reducing valve to open wider, thereby increasing the flow rate of the pressure-reducing valve; a decrease in the pilot stage pressure of the pressure-reducing valve will cause the opening of the main valve spool of the pressure-reducing valve to decrease, thereby reducing the flow rate of the pressure-reducing valve.
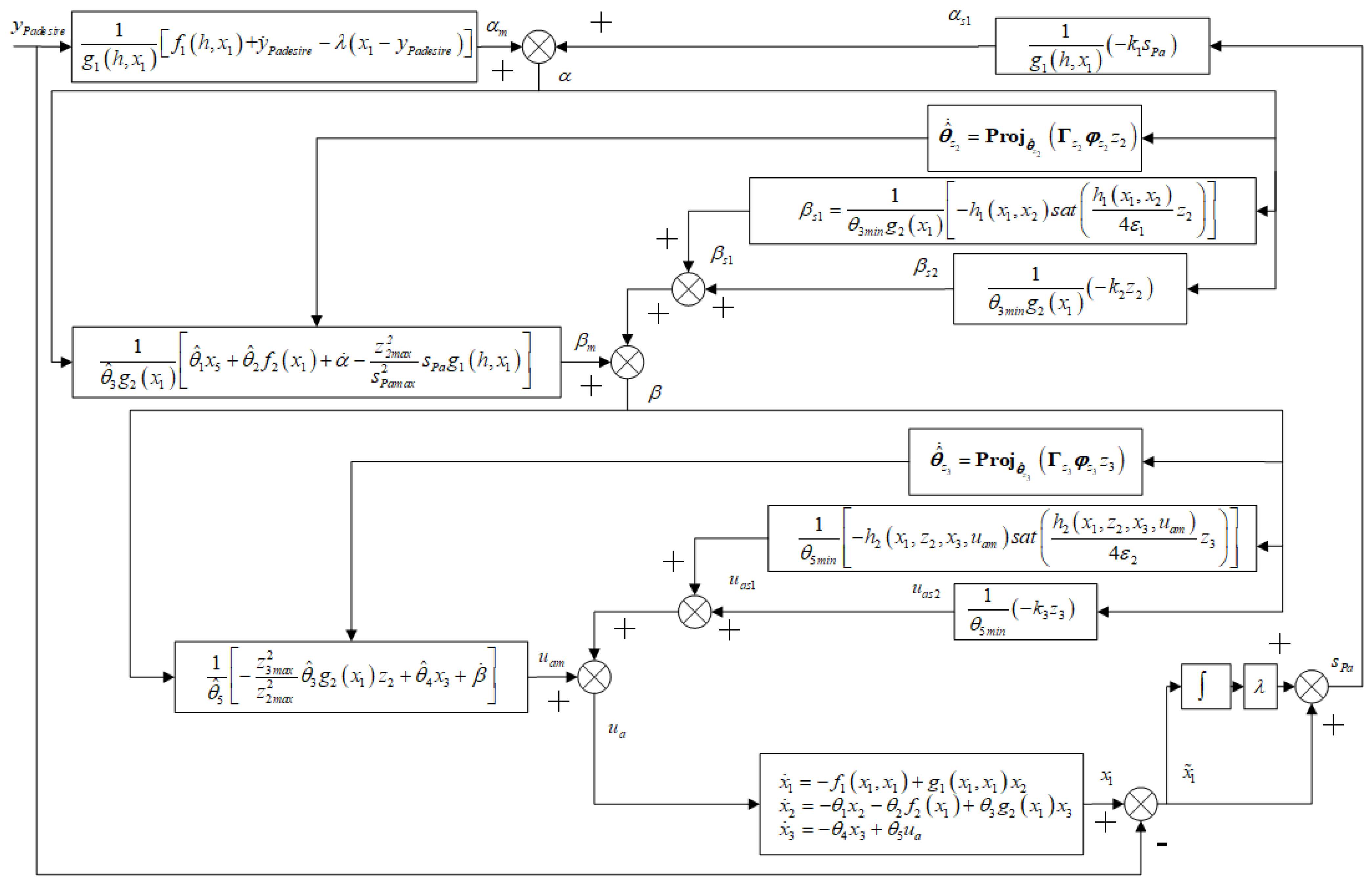
3. Nonlinear ARC Design for Air Chamber Pressure
- (1)
- The Lyapunov function can decay exponentially to the exact accuracy with convergence rate , and the upper bound of the exponential convergence rate and tracking error steady-state values can be freely adjusted through the controller parameters and . The tracking control error of the slurry level can achieve its predetermined transient and steady-state performance.
- (2)
- If, within a finite time, the slurry level control system only has parameter uncertainty and no unmodeled error, then the slurry level tracking control error can gradually converge to zero. Furthermore, if the control input satisfies the Persistent Excitation condition (PE condition), the estimated parameter values and can converge to their true values and respectively.
4. Verification
4.1. Simulation Verification
4.2. Experiment Verification
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| Effective working area of pilot valve spool | Compressed air quality of air chamber | ||
| Effective working area of the pressure -acting end of the main valve spool | Total mass of the moving iron spool and the pilot valve spool | ||
| Effective working area of the outlet end of the main valve spool | Quality of the main valve spool | ||
| Viscous damping coefficient of the pilot valve spool | Pilot valve outlet pressure | ||
| Viscous damping coefficient of the main valve spool | Air pressure in air chamber | ||
| Flow coefficient of the pilot valve port | Expected air chamber pressure value | ||
| Flow coefficient of the main valve port | Downstream pressure | ||
| Diameter of the pilot valve spool | Pressure at the center point of the slurry chamber | ||
| Diameter of the main valve spool | Upstream pressure | ||
| Proportional electromagnetic output force | Inner radius of the air chamber | ||
| Slurry level height in slurry chamber | Radius of the cutterhead | ||
| Current of coil | Ideal gas constant | ||
| Gas adiabatic index of compressed air | Total coil resistance | ||
| Counter electromotive force coefficient | Absolute temperature of the air at the outlet of the pilot valve | ||
| Steady-state hydrodynamic coefficient of the pilot valve spool | Absolute temperature of the compressed air in the air chamber | ||
| Steady state hydrodynamic coefficient of the main valve spool | Absolute temperature of upstream air | ||
| Current force gain coefficient | Control input of pilot-operated pneumatic proportional three-way pressure-reducing valve | ||
| Reciprocal of the inertia time constant of the pilot valve port pressure | Voltage of electromagnet | ||
| Gain of pilot valve port pressure | Pilot valve outlet volume | ||
| Reciprocal of the inertia time constant of the volume flow rate of compressed air at the main valve | Volume change rate of the compressed air in the air chamber | ||
| Flow pressure coefficient of the pilot valve | Shield thrust speed | ||
| Flow pressure coefficient of the main valve | Pilot valve spool displacement | ||
| Pilot valve spool reset spring stiffness | Pilot valve spool velocity | ||
| Stiffness of the reset spring on the pressure connection side of the main valve spool | Pilot valve spool acceleration | ||
| Stiffness of the reset spring on the outlet side of the main valve spool | Main valve spool displacement | ||
| Displacement force gain coefficient | Main valve spool velocity | ||
| Inductance of coil | Main valve spool acceleration | ||
| Pilot valve outlet air quality |
References
- Shen, X.; Chen, Y.F.; Cao, L.Q.; Chen, X.S.; Fu, Y.B.; Hong, C.Y. Prediction of the slurry pressure and inversion of formation characteristics based on a machine learning algorithm during tunneling in a fault fracture zone. Tunneling Undergr. Space Technol. 2024, 144, 105514. [Google Scholar] [CrossRef]
- Xu, D.M.; Wang, Y.S.; Huang, J.Q.; Liu, S.J.; Xu, S.J.; Zhou, K. Prediction of geology condition for slurry pressure balanced shield tunnel with super-large diameter by machine learning algorithms. Tunneling Undergr. Space Technol. 2023, 131, 104852. [Google Scholar] [CrossRef]
- Liu, X.; Liu, D.; Chen, Q.; Zhou, X.; Xiong, F. Research on the Sensitivity of Factors Affecting the Stability of Slurry Shield Excavation Face and Control Parameter Optimization. Chin. J. Undergr. Space Eng. 2022, 18, 1954–1961. [Google Scholar]
- Zizka, Z.; Schoesser, B.; Thewes, M. Physical modelling of transient processes at the slurry supported tunnel face during shield excavation. In Proceedings of the 10th International Symposium on Geotechnical Aspects of Underground Construction in Soft Ground (IS-Cambridge), Cambridge, UK, 29 June–1 July 2022; pp. 482–489. [Google Scholar]
- Wang, Q.; Xie, X.Y.; Shahrour, I.; Huang, Y. Use of deep learning, denoising technic and cross-correlation analysis for the prediction of the shield machine slurry pressure in mixed ground conditions. Autom. Constr. 2021, 128, 103741. [Google Scholar] [CrossRef]
- Shen, X.; Yuan, D.; Wu, J.; Li, X.; Jin, D.; Wang, T. Development and Application of Model Test Platform for Slurry Balance Shield Under High Water Pressure. China J. Highw. Transp. 2020, 33, 164–175. [Google Scholar]
- Liu, X.; Wang, F.; Yuan, D.; Fang, H.; Zhang, S. Range of support pressures for slurry shield and analysis of its influence factors. Chin. J. Geotech. Eng. 2019, 41, 908–917. [Google Scholar]
- Qi, C.; He, C.; Feng, K.; Tang, Y.; Wang, W.; Xia, W. Development and application of simulation test system for slurry balance shield. Chin. J. Geotech. Eng. 2016, 38, 1999–2008. [Google Scholar]
- Liu, Q.; Yang, Z. Model test research on excavation face stability of slurry balanced shield in permeable sand layers. Rock Soil Mech. 2014, 35, 2255–2260. [Google Scholar]
- Wei, D.W.; Zhu, W.; Min, F.L.; Xia, S.Q. Experimental Study on the Balance Law Between Slurry Pressure and Effective Stress in a Slurry Shield. In Proceedings of the International Symposium on Geotechnical Engineering for High-Speed Transportation Infrastructure (IS-GeoTrans), Hangzhou, China, 26–28 October 2012; pp. 210–219. [Google Scholar]
- Song, Y.; Xu, B. Initial Parameters for Bubble Cabin of Large Diameter Slurry Shield. J. Tongji Univ. Nat. Sci. 2010, 38, 1221–1225. [Google Scholar]
- Li, Y.; Zhang, Z.; Zhang, G. Laboratory study on face stability mechanism of slurry shields. Chin. J. Geotech. Eng. 2007, 29, 1074–1079. [Google Scholar]
- Zhang, Y.K.; Gong, G.F.; Yang, H.Y.; Li, W.J.; Liu, J. Precision versus intelligence: Autonomous supporting pressure balance control for slurry shield tunnel boring machines. Autom. Constr. 2020, 114, 103173. [Google Scholar] [CrossRef]
- Li, X.F.; Gong, G.F. Objective-oriented genetic algorithm based dynamical sliding mode control for slurry level and air pressure in shield tunneling. Autom. Constr. 2020, 109, 102987. [Google Scholar] [CrossRef]
- Li, X.F.; Gong, G.F. Predictive control of slurry pressure balance in shield tunneling using diagonal recurrent neural network and evolved particle swarm optimization. Autom. Constr. 2019, 107, 102928. [Google Scholar] [CrossRef]
- Li, X.; Zhang, H.; Xue, Y.; Shao, C. Pressure Balance Control System for Slurry Shield Based on Predictive Function Control; Springer International Publishing: Cham, Switzerland, 2015; pp. 501–510. [Google Scholar]
- Zhou, C.; Ding, L.Y.; He, R. PSO-based Elman neural network model for predictive control of air chamber pressure in slurry shield tunneling under Yangtze River. Autom. Constr. 2013, 36, 208–217. [Google Scholar] [CrossRef]
- Song, Y.; Xi, Y.; Li, W. Simulation Design on Balance Control System for Excavating Face of Slurry Shield. J. Tongji Univ. Nat. Sci. 2010, 38, 574–579. [Google Scholar]
- Zhang, Y.K.; Gong, G.F.; Yang, H.Y.; Chen, Y.X.; Chen, G.L. Towards autonomous and optimal excavation of shield machine: A deep reinforcement learning-based approach. J. Zhejiang Univ. -Sci. A 2022, 23, 458–478. [Google Scholar] [CrossRef]
- Dong, D.; Li, X. Simulation and Experimental Research on the Response of a Novel High-pressure Pneumatic Pilot-operated Solenoid Valve. In Proceedings of the 19th International Conference on Mechatronics and Machine Vision in Practice (M2VIP), Auckland, New Zealand, 28–30 November 2012; pp. 480–484. [Google Scholar]
- Wu, B.J. Research on High-Pressure Servo Cylinder and High-Pressure Pneumatic Servo Position System. Ph.D. Thesis, Huazhong University of Science and Technology, Wuhan, China, 2002. [Google Scholar]
- Yuan, H.J. Recursive least squares algorithm for nonlinear systems with piece-wise linearities. In Proceedings of the 2nd International Conference on Sensors, Measurement and Intelligent Materials (ICSMIM 2013), Guangzhou, China, 16–17 November 2013; Volume 475–476, pp. 960–963. [Google Scholar]
- Juang, J.G.; Lin, B.S. Nonlinear system identification by evolutionary computation and recursive estimation method. In Proceedings of the American Control Conference 2005 (ACC), Portland, OR, USA, 8–10 June 2005; pp. 5073–5078. [Google Scholar]
- Reed, J.S.; Ioannou, P.A. Instability analysis and robust adaptive-control of robotic manipulators. IEEE Trans. Robot. Autom. 1989, 5, 381–386. [Google Scholar] [CrossRef]
- Qu, Z.H. Robust-control of nonlinear uncertain systems under generalized matching conditions. Automatica 1993, 29, 985–998. [Google Scholar] [CrossRef]
- Yao, B.; Tomizuka, M. Adaptive robust control of SISO nonlinear systems in a semi-strict feedback form. Automatica 1997, 33, 893–900. [Google Scholar] [CrossRef]
- Xu, L.; Yao, B. Adaptive robust precision motion control of linear motors with negligible electrical dynamics: Theory and experiments. In Proceedings of the 2000 American Control Conference (ACC 2000), Chicago, IL, USA, 28–30 June 2000; pp. 2583–2587. [Google Scholar]
- Narendra, K.S.; Annaswamy, A.M. A new adaptive law for robust adaptation without persistent excitation. IEEE Trans. Autom. Control 1987, 32, 134–145. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| 8.00 | |
| 1.2 × 10−7 | |
| 1.6 × 10−7 | |
| 1.00 | |
| 10,250 |
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| 1.215 m | 101,325 Pa | ||
| 0.71 m | 0.02 | ||
| 0.595 m | 0.1 | ||
| 1.4 | diag (200, 3 × 10−14, 6 × 10−14) | ||
| 287 J/(kg·K) | 30,000 | ||
| 0.01 | 5 | ||
| 0.5 | diag (6 × 10−14, 1 × 10−13, 1 × 10−5) |
| Controller | Stability Time (95%) | Steady-State Error |
|---|---|---|
| Rise (Nonlinear ARC) | 6.44 s | ±0.25% |
| Decline (Nonlinear ARC) | 5.30 s | ±0.25% |
| Rise (PID) | 11.63 s | ±0.50% |
| Decline (PID) | 9.14 s | ±0.50% |
| Stability Time (95%) | Steady-State Error | |
|---|---|---|
| Rise | 7.40 s | ±2.50% |
| Decline | 9.20 s | ±2.50% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, S.; Zhang, Y.; Gong, G.; Yang, H. The Development and Nonlinear Adaptive Robust Control of the Air Chamber Pressure Regulation System of a Slurry Pressure Balance Shield Tunneling Machine. Machines 2024, 12, 457. https://doi.org/10.3390/machines12070457
Wang S, Zhang Y, Gong G, Yang H. The Development and Nonlinear Adaptive Robust Control of the Air Chamber Pressure Regulation System of a Slurry Pressure Balance Shield Tunneling Machine. Machines. 2024; 12(7):457. https://doi.org/10.3390/machines12070457
Chicago/Turabian StyleWang, Shuai, Yakun Zhang, Guofang Gong, and Huayong Yang. 2024. "The Development and Nonlinear Adaptive Robust Control of the Air Chamber Pressure Regulation System of a Slurry Pressure Balance Shield Tunneling Machine" Machines 12, no. 7: 457. https://doi.org/10.3390/machines12070457
APA StyleWang, S., Zhang, Y., Gong, G., & Yang, H. (2024). The Development and Nonlinear Adaptive Robust Control of the Air Chamber Pressure Regulation System of a Slurry Pressure Balance Shield Tunneling Machine. Machines, 12(7), 457. https://doi.org/10.3390/machines12070457