
Defining the Consistent Velocity of Omnidirectional Mobile Platforms



Abstract
1. Introduction
1.1. New Contribution
1.2. Structure of the Paper
2. Materials and Methods
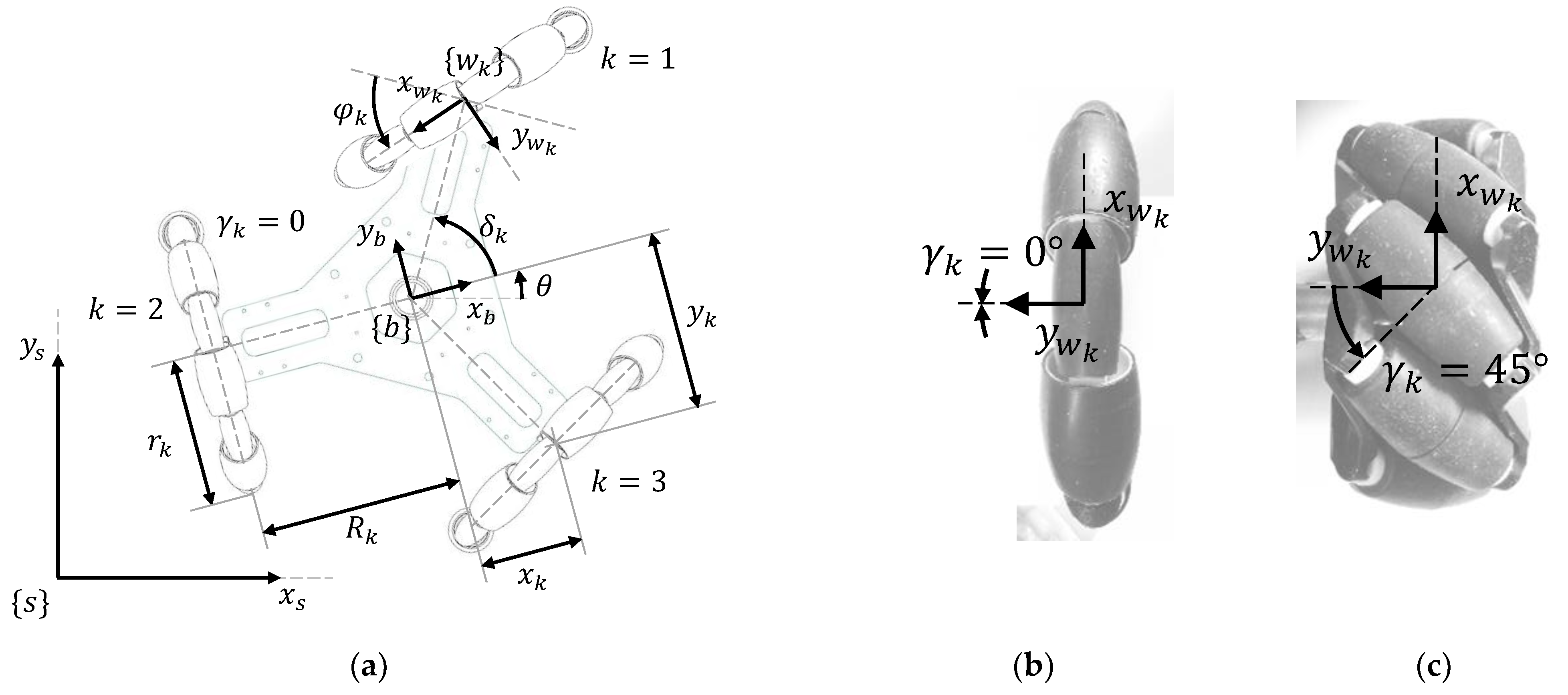
2.1. Platform Configurations Assessed
2.2. Kinematic Model of an Omnidirectional Platform
3. Problem Definition
3.1. Maximum Translational Velocity of a Mobile Platform
3.2. Problem Caused by the Maximum Velocity of the Motors
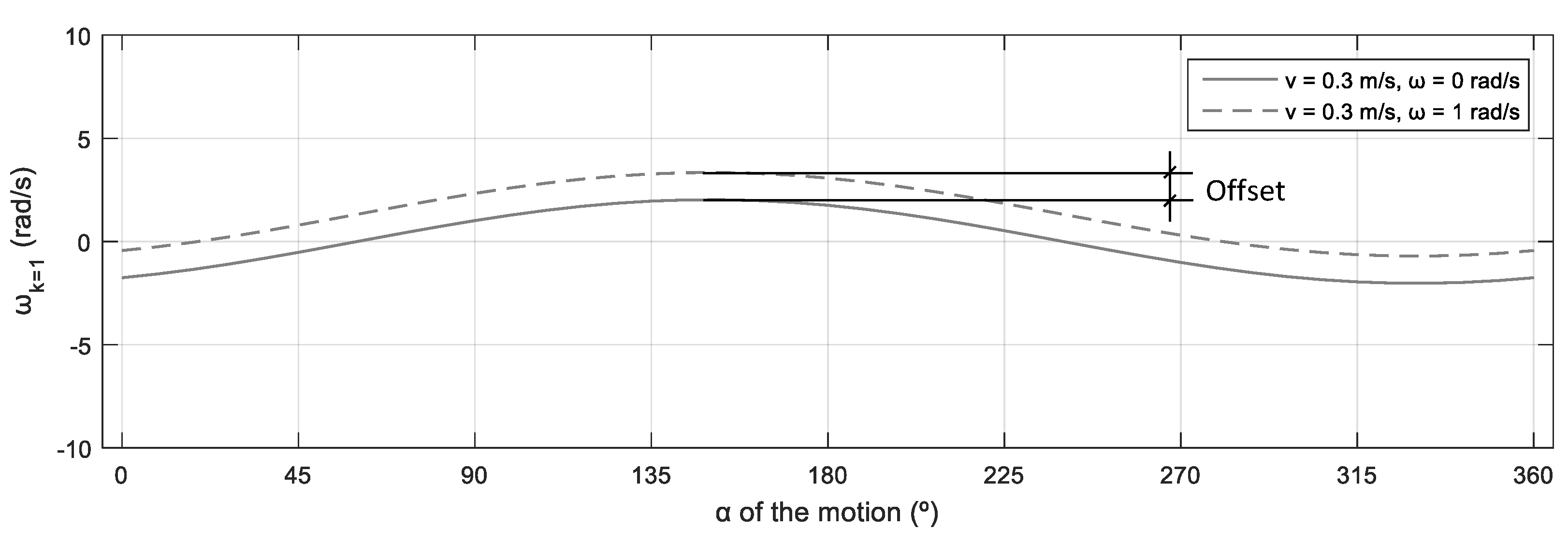
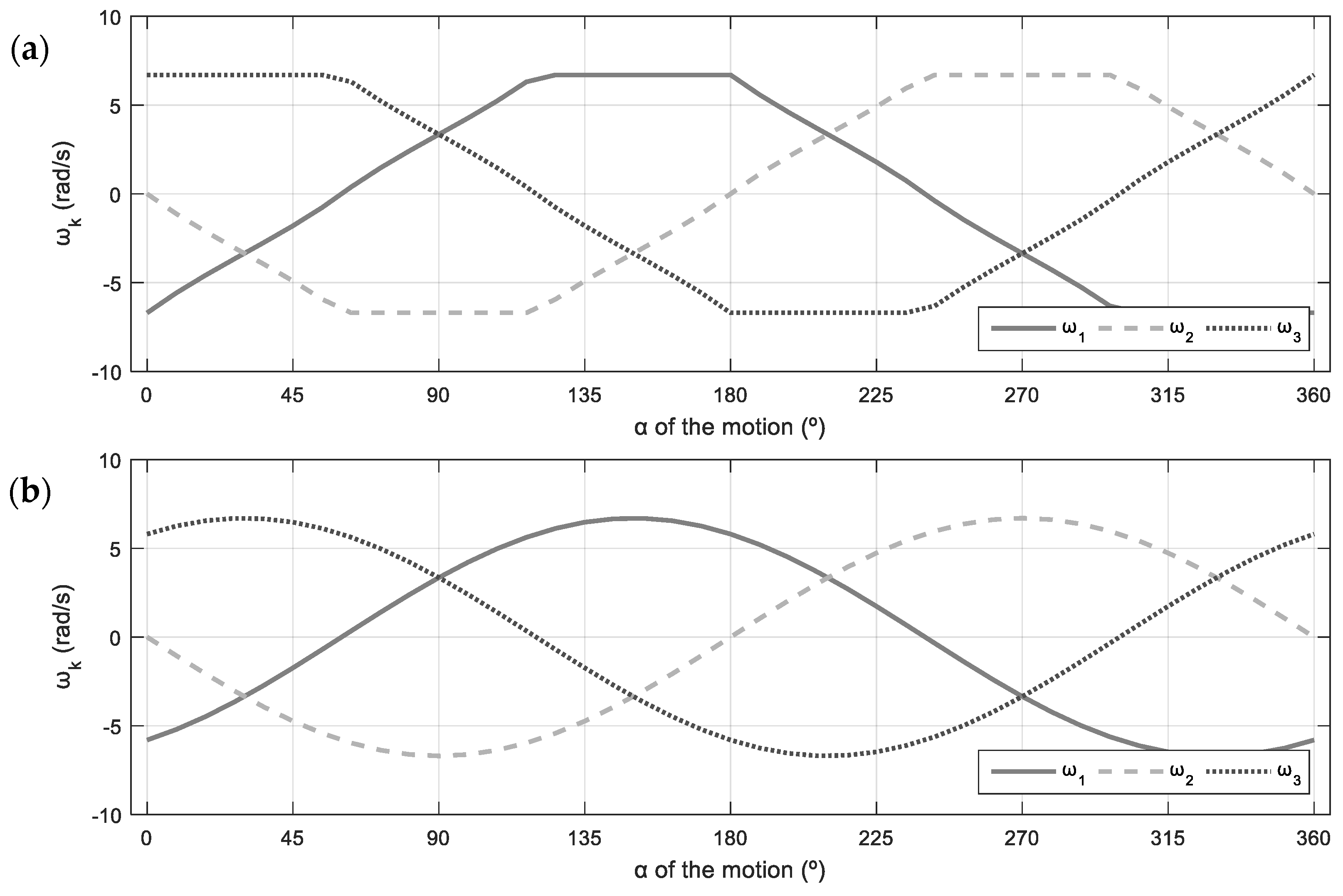
3.3. Profile of the Angular Velocities of the Wheels
4. Consistent Velocity
4.1. Consistent Velocity Definition
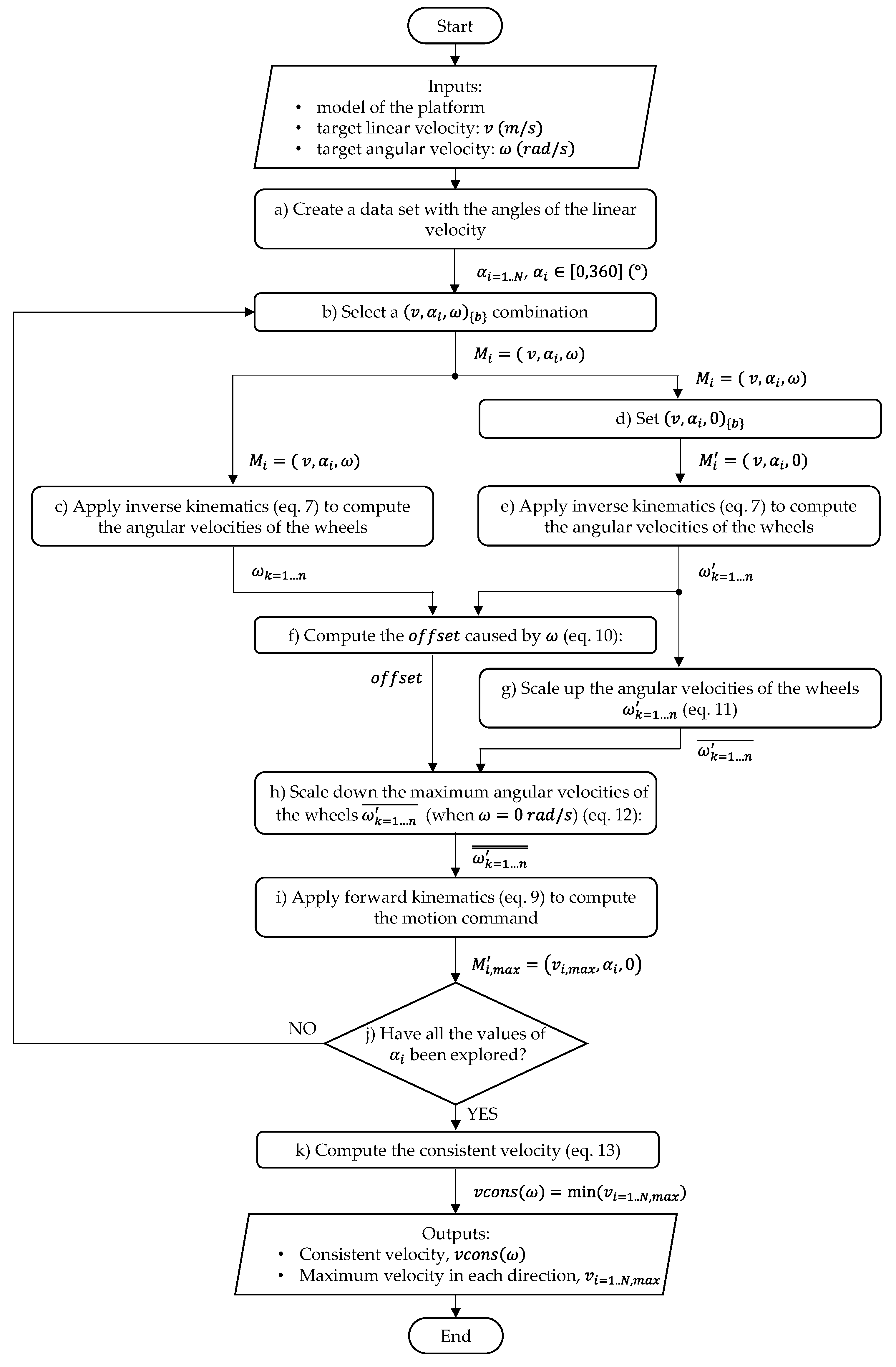
4.2. Consistent Velocity Computation
5. Results
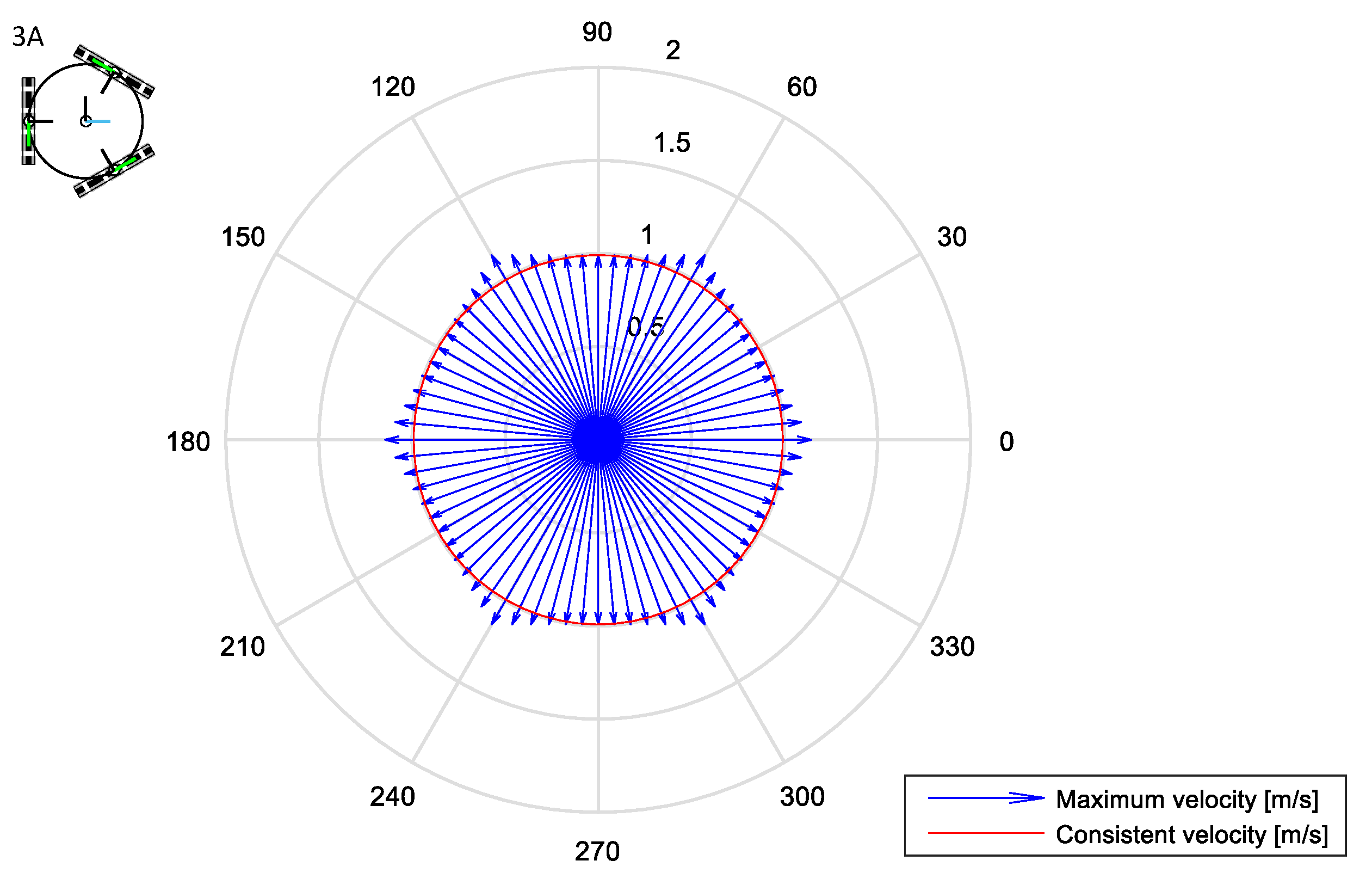
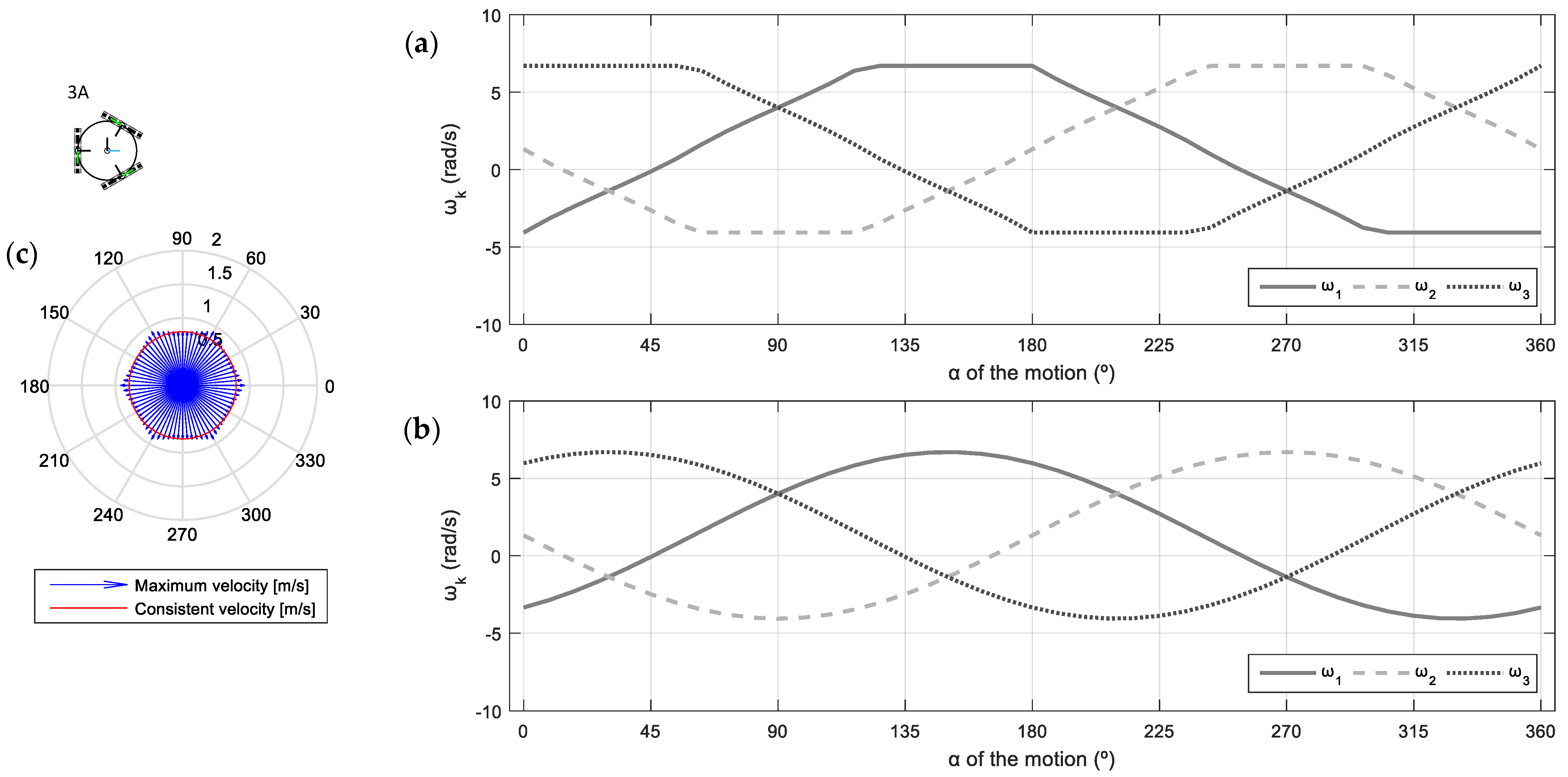
5.1. Consistent Velocity of the 3A Platform
5.1.1. Mobile Platform 3A: Consistent Velocity for
5.1.2. Mobile Platform 3A: Consistent Velocity for
5.1.3. Mobile Platform 3A: Consistent Velocity as a Function of
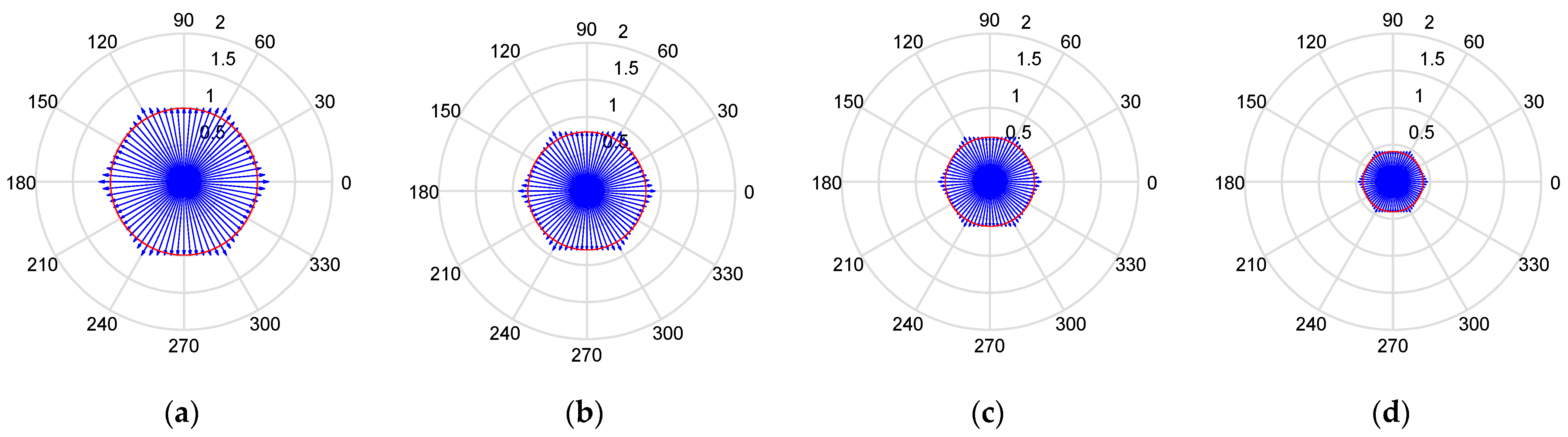
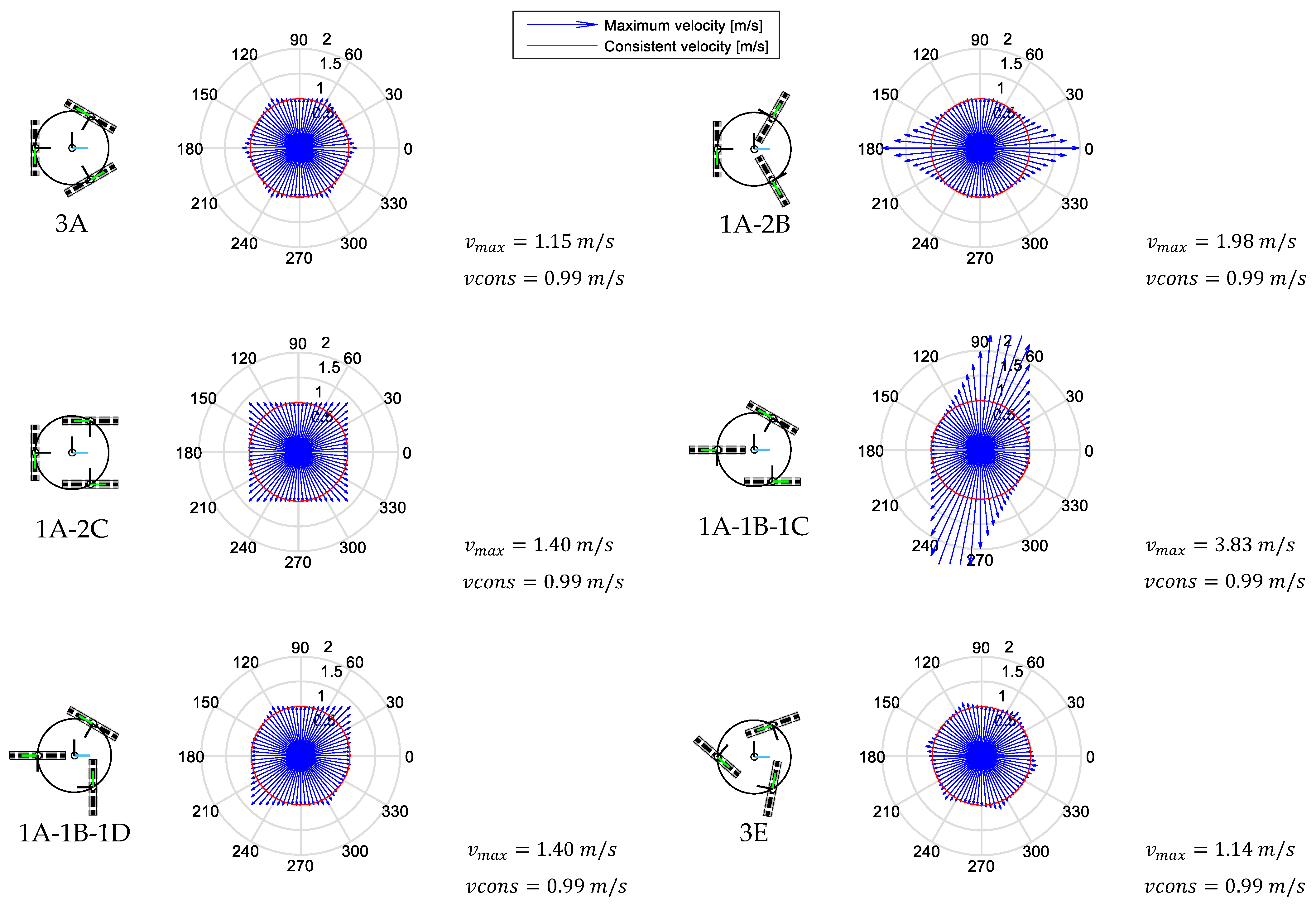
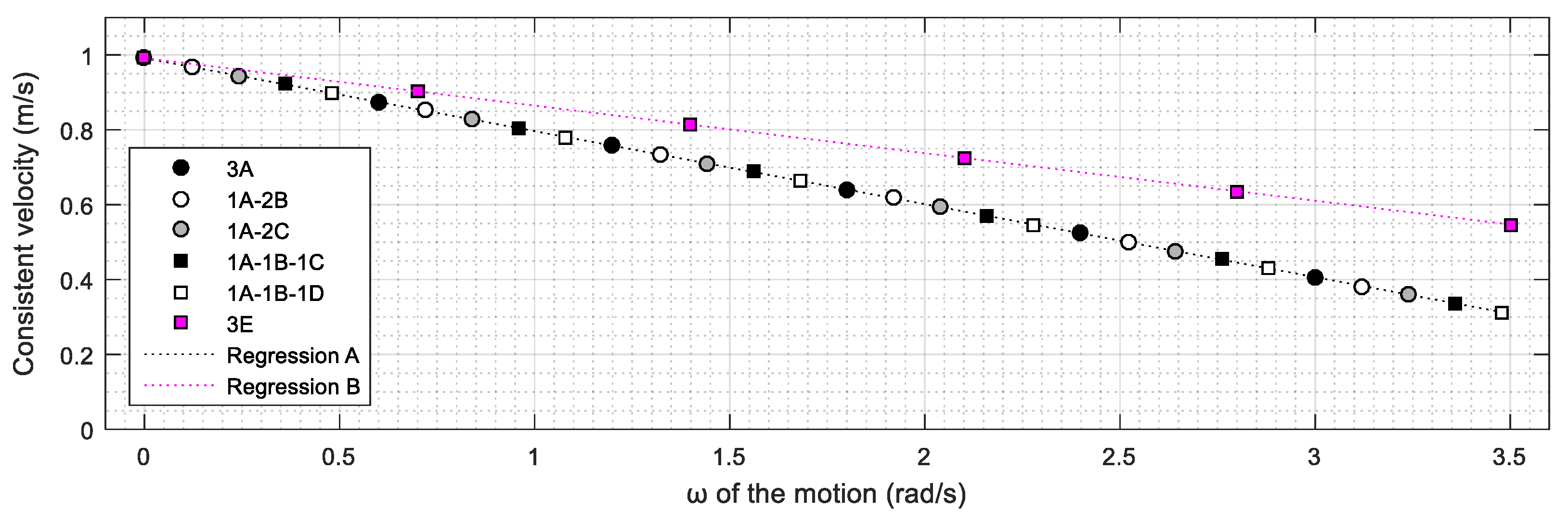
5.2. Consistent Velocity of the Set of Mobile Platforms
5.2.1. Consistent Velocity for
5.2.2. Consistent Velocity for
6. Discussion
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Gao, Z.Q.; Chen, H.B.; Du, Y.P.; Wei, L. Design and Development of an Omni-Directional Mobile Robot for Logistics. Appl. Mech. Mater. 2014, 602–605, 1006–1010. [Google Scholar] [CrossRef]
- Qian, J.; Zi, B.; Wang, D.; Ma, Y.; Zhang, D. The Design and Development of an Omni-Directional Mobile Robot Oriented to an Intelligent Manufacturing System. Sensors 2017, 17, 2073. [Google Scholar] [CrossRef] [PubMed]
- Qian, K.; Song, A.; Bao, J.; Zhang, H. Small Teleoperated Robot for Nuclear Radiation and Chemical Leak Detection. Int. J. Adv. Robot. Syst. 2012, 9, 70. [Google Scholar] [CrossRef]
- Klamt, T.; Rodriguez, D.; Schwarz, M.; Lenz, C.; Pavlichenko, D.; Droeschel, D.; Behnke, S. Supervised Autonomous Locomotion and Manipulation for Disaster Response with a Centaur-Like Robot. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 1–8. [Google Scholar]
- Ding, L.; Xing, H.; Torabi, A.; Mehr, J.K.; Sharifi, M.; Gao, H.; Mushahwar, V.K.; Tavakoli, M. Intelligent Assistance for Older Adults via an Admittance-Controlled Wheeled Mobile Manipulator with Task-Dependent End-Effectors. Mechatronics 2022, 85, 102821. [Google Scholar] [CrossRef]
- Gao, X.; Wang, Y.; Zhou, D.; Kikuchi, K. Floor-cleaning Robot Using Omni-directional Wheels. Ind. Robot. Int. J. 2009, 36, 157–164. [Google Scholar] [CrossRef]
- Eyuboglu, M.; Atali, G. A Novel Collaborative Path Planning Algorithm for 3-Wheel Omnidirectional Autonomous Mobile Robot. Robot. Auton. Syst. 2023, 169, 104527. [Google Scholar] [CrossRef]
- Tian, Y.; Zhang, S.; Liu, J.; Chen, F.; Li, L.; Xia, B. Research on a New Omnidirectional Mobile Platform with Heavy Loading and Flexible Motion. Adv. Mech. Eng. 2017, 9, 1687814017726683. [Google Scholar] [CrossRef]
- Terakawa, T.; Yogou, M.; Komori, M. Motion Characteristics Analysis of a Mecanum-Wheeled Omnidirectional Mobile Robot on a Slope. In Proceedings of the IFToMM WC 2023: Advances in Mechanism and Machine Science, Tokyo, Japan, 5–10 November 2023; Springer: Cham, Switzerland, 2023; Volume 148, pp. 733–741. [Google Scholar]
- Galati, R.; Mantriota, G.; Reina, G. Adaptive Heading Correction for an Industrial Heavy-Duty Omnidirectional Robot. Sci. Rep. 2022, 12, 19608. [Google Scholar] [CrossRef] [PubMed]
- Mohanraj, A.P.; Parameshwaran, P.; Sivasubramaniyan, B.P.; Srinivasan, P.; Nijanthan, V. The Importance of the Fourth Wheel in a Four-Wheeled Omni Directional Mobile Robot-An Experimental Analysis. J. Phys. Conf. Ser. 2023, 2601, 012004. [Google Scholar] [CrossRef]
- Thai, N.H.; Ly, T.T.K.; Dzung, L.Q. Trajectory Tracking Control for Mecanum Wheel Mobile Robot by Time-Varying Parameter PID Controller. Bull. Electr. Eng. Inform. 2022, 11, 1902–1910. [Google Scholar] [CrossRef]
- Li, Y.; Dai, S.; Zhao, L.; Yan, X.; Shi, Y. Topological Design Methods for Mecanum Wheel Configurations of an Omnidirectional Mobile Robot. Symmetry 2019, 11, 1268. [Google Scholar] [CrossRef]
- Almasri, E.; Uyguroğlu, M.K. Modeling and Trajectory Planning Optimization for the Symmetrical Multiwheeled Omnidirectional Mobile Robot. Symmetry 2021, 13, 1033. [Google Scholar] [CrossRef]
- Oliveira, H.P.; Sousa, A.J.; Moreira, A.P.; Costa, P.J. Modeling and Assessing of Omni-Directional Robots with Three and Four Wheels. In Contemporary Robotics—Challenges and Solutions; IntechOpen: London, UK, 2009; pp. 207–230. ISBN 978-953-307-038-4. [Google Scholar]
- Balkcom, D.J.; Kavathekar, P.A.; Mason, M.T. Time-Optimal Trajectories for an Omni-Directional Vehicle. Int. J. Robot. Res. 2006, 25, 985–999. [Google Scholar] [CrossRef]
- Kim, K.B.; Kim, B.K. Minimum-Time Trajectory for Three-Wheeled Omnidirectional Mobile Robots Following a Bounded-Curvature Path With a Referenced Heading Profile. IEEE Trans. Robot. 2011, 27, 800–808. [Google Scholar] [CrossRef]
- Lynch, K.M.; Park, F.C. Modern Robotics: Mechanics, Planning, and Control; Cambridge University Press: Cambridge, UK, 2017; ISBN 978-1-107-15630-2. [Google Scholar]
- Palacín, J.; Rubies, E.; Clotet, E.; Martínez, D. Evaluation of the Path-Tracking Accuracy of a Three-Wheeled Omnidirectional Mobile Robot Designed as a Personal Assistant. Sensors 2021, 21, 7216. [Google Scholar] [CrossRef] [PubMed]
- Palacín, J.; Rubies, E.; Clotet, E. Systematic Odometry Error Evaluation and Correction in a Human-Sized Three-Wheeled Omnidirectional Mobile Robot Using Flower-Shaped Calibration Trajectories. Appl. Sci. 2022, 12, 2606. [Google Scholar] [CrossRef]
- Palacín, J.; Rubies, E.; Clotet, E. The Assistant Personal Robot Project: From the APR-01 to the APR-02 Mobile Robot Prototypes. Designs 2022, 6, 66. [Google Scholar] [CrossRef]
- Yunardi, R.T.; Arifianto, D.; Bachtiar, F.; Prananingrum, J.I. Holonomic Implementation of Three Wheels Omnidirectional Mobile Robot Using DC Motors. J. Robot. Control JRC 2021, 2, 65–71. [Google Scholar] [CrossRef]
- Savaee, E.; Rahmani Hanzaki, A.; Anabestani, Y. Kinematic Analysis and Odometry-Based Navigation of an Omnidirectional Wheeled Mobile Robot on Uneven Surfaces. J. Intell. Robot. Syst. 2023, 108, 13. [Google Scholar] [CrossRef]
- Ortega-Contreras, J.A.; Pale-Ramon, E.G.; Vazquez-Olguin, M.-A.; Andrade-Lucio, J.A.; Ibarra-Manzano, O.; Shmaliy, Y.S. Tracking a Holonomic Mobile Robot with Systematic Odometry Errors. In Proceedings of the 2023 International Conference on Control, Artificial Intelligence, Robotics & Optimization (ICCAIRO), Crete, Greece, 11–13 April 2023; pp. 99–104. [Google Scholar]
- Palacín, J.; Rubies, E.; Bitriá, R.; Clotet, E. Phasor-Like Interpretation of the Angular Velocity of the Wheels of Omnidirectional Mobile Robots. Machines 2023, 11, 698. [Google Scholar] [CrossRef]
- Parmentier, E.M.; Torrance, K.E. Kinematically Consistent Velocity Fields for Hydrodynamic Calculations in Curvilinear Coordinates. J. Comput. Phys. 1975, 19, 404–417. [Google Scholar] [CrossRef]
- Du, D.; Zhuang, Y.; Sun, Q.; Yang, X.; Dias, D. Bearing Capacity Evaluation for Shallow Foundations on Unsaturated Soils Using Discretization Technique. Comput. Geotech. 2021, 137, 104309. [Google Scholar] [CrossRef]
- Consistent Velocity. Available online: https://es.mathworks.com/matlabcentral/fileexchange/165351-consistent_velocity (accessed on 7 May 2024).
- Hijikata, M.; Miyagusuku, R.; Ozaki, K. Omni Wheel Arrangement Evaluation Method Using Velocity Moments. Appl. Sci. 2023, 13, 1584. [Google Scholar] [CrossRef]
- Arreguín-Jasso, D.; Sanchez-Orta, A.; Alazki, H. Scheme of Operation for Multi-Robot Systems with Decision-Making Based on Markov Chains for Manipulation by Caged Objects. Machines 2023, 11, 442. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | 3A | 1A-2B | 1A-2C | 1A-1B-1C | 1A-1B-1D | 3E |
| Diagram |  |  |  |  |  |  |
| (°) | [0 0 0] | [−90 0 −90] | [30 0 −30] | [0 −90 −30] | [0 −90 60] | [49.37 49.37 49.37] |
| Parameter | Case with | Case with | Case with |
|---|---|---|---|
| Consistent velocity | 0.99 m/s | 0.80 m/s | 0.80 m/s |
| Maximum of the maximum translational velocities | 1.15 m/s | 0.92 m/s | 0.92 m/s |
| Minimum of the maximum translational velocities | 0.99 m/s | 0.80 m/s | 0.80 m/s |
| value | 0 rad/s | 1.32 rad/s | −1.32 rad/s |
| Maximum velocity of the wheels ( | 6.70 rad/s | 6.70 rad/s | 4.07 rad/s |
| Minimum velocity of the wheels ( | −6.70 rad/s | −4.07 rad/s | −6.70 rad/s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rubies, E.; Palacín, J. Defining the Consistent Velocity of Omnidirectional Mobile Platforms. Machines 2024, 12, 397. https://doi.org/10.3390/machines12060397
Rubies E, Palacín J. Defining the Consistent Velocity of Omnidirectional Mobile Platforms. Machines. 2024; 12(6):397. https://doi.org/10.3390/machines12060397
Chicago/Turabian StyleRubies, Elena, and Jordi Palacín. 2024. "Defining the Consistent Velocity of Omnidirectional Mobile Platforms" Machines 12, no. 6: 397. https://doi.org/10.3390/machines12060397
APA StyleRubies, E., & Palacín, J. (2024). Defining the Consistent Velocity of Omnidirectional Mobile Platforms. Machines, 12(6), 397. https://doi.org/10.3390/machines12060397