1. Introduction
As an important branch of nonlinear dynamics, memory elements and their related mathematical theories have been well developed after the introduction of the memristor concept [
1,
2,
3,
4,
5,
6,
7,
8,
9]. In particular, since the seminal
Nature paper in 2008 triggered unprecedented attention from both industry and academia, publications in this area have seen explosive growth [
10]. In 1971, in order to enhance the logical completeness of circuit theory, Chua proposed a novel two-terminal circuit element, named the memristor (short for memory resistor), as the fourth fundamental circuit element, which is characterized by the relationship between the charge and the flux [
1]. Five years later, the concept of memristors was generalized to a class of nonlinear devices called memristive systems, and various generic properties of memristive systems were derived [
11]. In 2003, Chua presented a periodic table of
circuit elements consisting of four circuit element species: frequency-dependent resistors, capacitors, inductors, and negative resistors [
12]. Just like Mendeleev’s periodic table of chemical elements in chemistry, this table can be utilized to predict novel circuit elements. Dr. Stanley Williams’ team from HP Labs fabricated a nano-scale titanium dioxide device in 2008 and analytically proved that such a device is a physical realization of the memristor [
13]. Di Ventra et al., extended the concept of memory devices to capacitive and inductive elements, called mem-capacitors and mem-inductors [
14]. Inspired by the observation that the quadrangle of the basic circuit element proposed by Chua may be asymmetric, Wang presented an elementary circuit element triangle that is a collection of passive fundamental circuit elements in 2013 [
15]. Such circuit memory elements and their combination open up new possibilities in electronics. Their applications include (but are not limited to) non-volatile memory, machine learning and neuromorphic computing [
16,
17,
18,
19,
20,
21].
Inspired by the circuit memory element theory, several mechanical devices were found to exhibit memory characteristics and therefore were identified as mechanical memory elements. As early as 1972, a tapered dashpot was found as a simple physical example of the mem-damper by Oster and Auslander [
22]. In 2018, Zhang et al., predicted the existence of a new ideal mechanical element called the mem-inerter as the memory counterpart of the inerter [
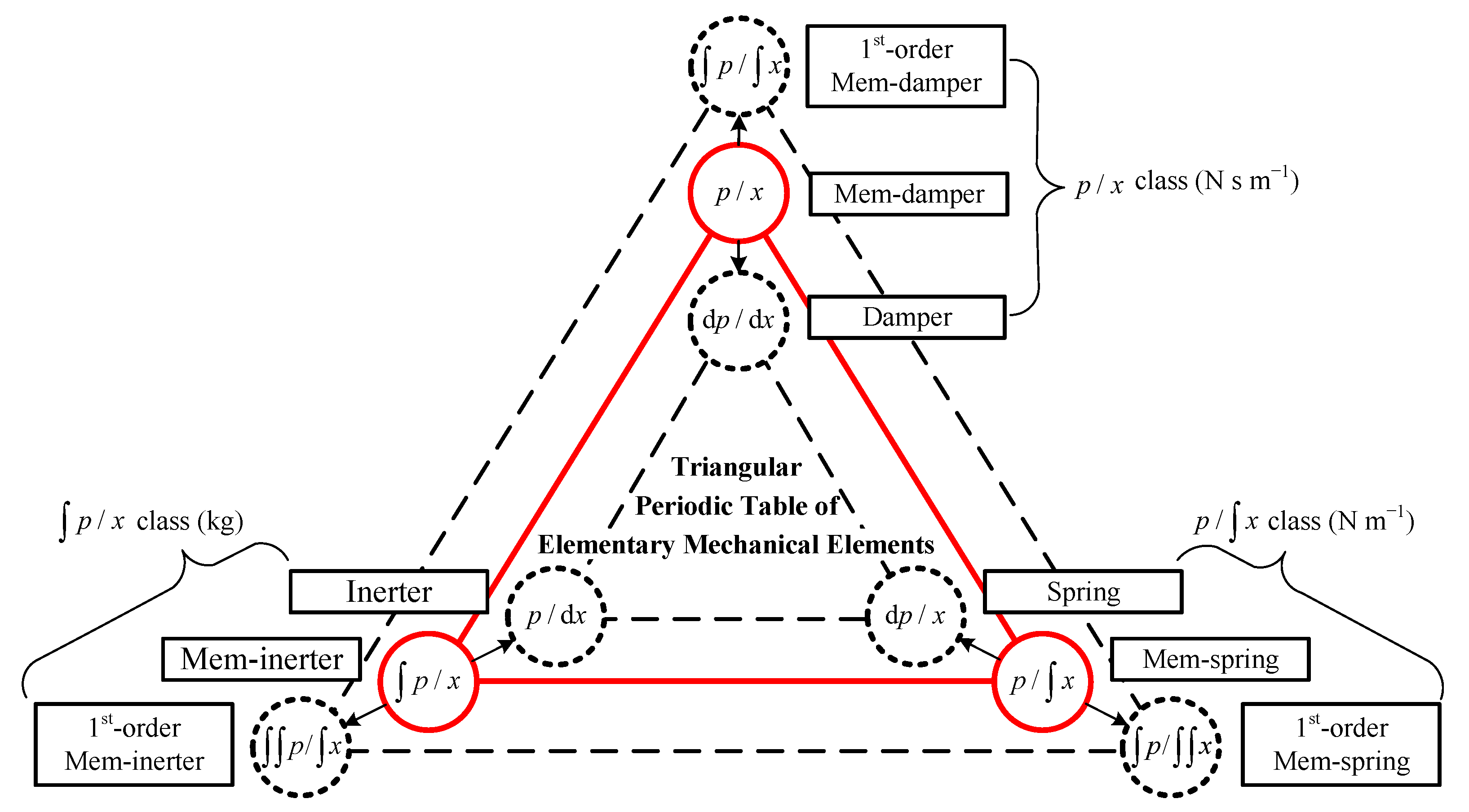
6]. Furthermore, based on the elementary circuit element triangle presented by Wang and force–current analogies, Zhang et al., also introduced a triangular periodic table of elementary mechanical elements, as shown in
Figure 1. Zhang et al., found one of the physical embodiments of the mem-inerter, a displacement-dependent fluid inerter device, although such a device has a parasitic element called the extended mem-damper [
7]. It is worth noting that this displacement-dependent inerter device cannot be modeled as a nonlinear inerter in the force versus acceleration plane but as a mem-inerter in the integrated momentum versus displacement plane. The aforementioned finding, as well as the existence of the mem-inerter and the extended mem-damper, were experimentally verified. Zhang et al., also found that the mem-inerter can be equivalent to the semi-active inerter performing an initial position-dependent inertial control strategy, thereby improving the performance of the suspension system [
9]. Mem-inerters, mem-dampers, and mem-springs constitute an increasingly important class of two-terminal mechanical elements whose inertance, damping, and stiffness memorize the past states through which the elements have evolved. All three elements are nonlinear and can be identified by their pinched hysteresis loop in the momentum versus velocity plane, force versus velocity plane, and force versus displacement plane, respectively. A potential application of mechanical memory elements is in vibration isolation systems, since they can naturally self-adjust their inherent parameters according to load and excitation [
23].
Over the past century, a significant amount of research has been devoted to describing and analyzing conventional mechanical systems via Lagrangian and Hamiltonian methods [
24,
25,
26]. The significance of these classical frameworks lies not only in their broad range of applications, but also in their contribution to the advancement of profound comprehension of physics. Bao et al., incorporated the Lagrangian physical knowledge into neural networks and proposed a physics-guided Lagrangian neural network to establish differential equations of mechanical systems through data-driven and learning methods [
27,
28]. In the field of electricity, in order to solve the issue that circuit memory elements do not fit into the classical Lagrangian formulation, Jeltsema introduced a novel (co-)Lagrangian framework that includes circuit memory elements and their conventional linear counterparts in 2012 [
29]. Similarly, with the application of memory elements in mechanical systems and the increasing number of geometric nonlinearities in mechanical systems being proven to have memory characteristics, these classical modeling methods are no longer able to describe the nonlinear dynamic behavior of the system accurately. Therefore, it is necessary to consider the modeling method of mechanical systems made from mem-inerters, mem-springs, and mem-dampers. In the past few decades, the study of fractional calculus has attracted widespread attention from scholars, as it can accurately describe complex physical change processes with memory and heredity. In addition to fundamental mathematical research, fractional calculus is widely used in control engineering, materials science, biology, medicine, and other fields, and has made significant progress [
30,
31,
32,
33,
34,
35]. Inspired by the characteristics and development of fractional calculus, it is natural to consider whether memory elements can be generalized to the fractional calculus field, namely, the existence and modeling of fractional-order memory elements.
The motivation of this work is to provide a modeling method that can accurately describe the nonlinear dynamic behavior of the mechanical system with memory elements. In this paper, the integrated Lagrangian modeling method is proposed, using the corresponding energies in constitutive relationship planes of memory elements as the memory state functions to replace the conventional energies of the classical Lagrangian method. Such a modeling method can avoid the problems of non-self-adjointness and path dependence in modeling mechanical systems with memory elements via a classical Lagrangian method. The improvement in modeling accuracy provided by the integrated Lagrangian method is demonstrated by modeling a vehicle shimmy system with fluid mem-inerters. The errors and influencing factors between the modeling results of the classical Lagrangian method and the integrated Lagrangian method under pulse and random excitations are analyzed. Moreover, this paper also briefly discusses the application of fractional calculus to mechanical memory elements and their mathematical modeling.
The remainder of this paper is organized as follows. In
Section 2, the definition and mathematical properties of the mem-inerter, mem-damper, and mem-spring are discussed and a three-dimensional periodic table of mechanical memory elements, including fractional-order memory elements, is proposed. The structure of the Lagrangian equations for a large class of conventional mechanical vibration systems is briefly reviewed and extended to fractional calculus in
Section 3. In
Section 4, it is shown that mechanical memory elements do not fit into the classical Lagrangian framework, since these elements are nonconservative in their non-constitutive relation planes and the associated energies are not state functions. To circumvent this problem, the integrated Lagrangian method is proposed in
Section 5, whose Lagrangian is defined by the difference between two memory state functions and its fractional-order counterpart is also proposed. Mem-damper and damper losses can be included via the introduction of a general dissipation function. To verify the conclusion given in previous section, an example of a vehicle shimmy system with mem-inerters is presented in
Section 6. The modeling results of the system using the Lagrangian method and integrated Lagrangian method are compared, and the influencing factors of errors are analyzed. Finally, this paper is concluded in
Section 7.
2. Definition of Elementary Mechanical Memory Elements
Observing the triangular periodic table of elementary mechanical elements shown in
Figure 1, from a mathematical perspective, the behavior of the three basic two-terminal dampers, springs, and inerters, whether linear or nonlinear, is described by a relationship between two of the four basic mechanical variables, namely, momentum
p, force
f, displacement
x, and velocity
v, where
A damper can be described by a relationship between force and velocity; a spring by that of force and displacement; and an inerter by that of momentum and velocity.
Based on the research of circuit memory elements and inerters, Zhang postulated the existence of a new ideal mechanical element that is characterized by a constitutive relationship between the integrated momentum
and displacement
x [
7]. This element is referred to as a mem-inerter (a contraction of memory and inerter) referring to an inerter with memory. The memory aspect stems from the fact that a mem-inerter ‘remembers’ the amount of its across-variable velocity or through-variable momentum. More specifically, if
denotes the the integrated momentum and
x denotes the displacement, then a displacement-controlled mem-inerter is defined by the constitutive relationship
. Since displacement
x is defined by the time integral of velocity
v, and integrated momentum
is the time integral of momentum
p, or equivalently,
and
, it can be obtained that
where
is the incremental mem-inertance.
Note that (
4) is the definition of a mem-inerter in impedance form. The admittance form
, with incremental inverse mem-inertance
, is obtained by starting from the constitutive relationship
.
In addition to the mem-inerter, the memory effect can be associated with dampers and springs as well. To achieve this, let
denote the absement, a contraction of absence and displacement, namely the time integral of displacement, which can be written as
Then, a memory damper, or mem-damper for short, is a two-terminal element defined by a constitutive relationship
. Indeed, differentiation of the latter with respect to time yields
where
represents the incremental mem-damping and relates force to velocity. The memory aspect of a displacement-controlled mem-damper stems from the fact that it ’remembers’ the amount of velocity.
Dually, an absement-controlled mem-spring is defined by a constitutive relationship
, which, after differentiation with respect to time, yields
where
denotes the incremental mem-stiffness. The memory aspect of an absement-controlled mem-spring stems from the fact that it ‘remembers’ the amount of displacement.
A mem-damper and a mem-spring that depend on the history of their force can be formulated by starting from the constitutive relationship of the form and , respectively.
In the special case that the constitutive relationship of a mem-spring is linear, a mem-spring becomes an ordinary linear spring. Indeed, in such a case, (
7) reduces to
, with constant mem-stiffness
K (the slope of the line), or equivalently,
, which precisely equals Hooke’s law. The same holds for a linear mem-inerter and linear mem-damper, where (
4) reduces to
, or equivalently,
, and (
7) to
, or equivalently,
, respectively.
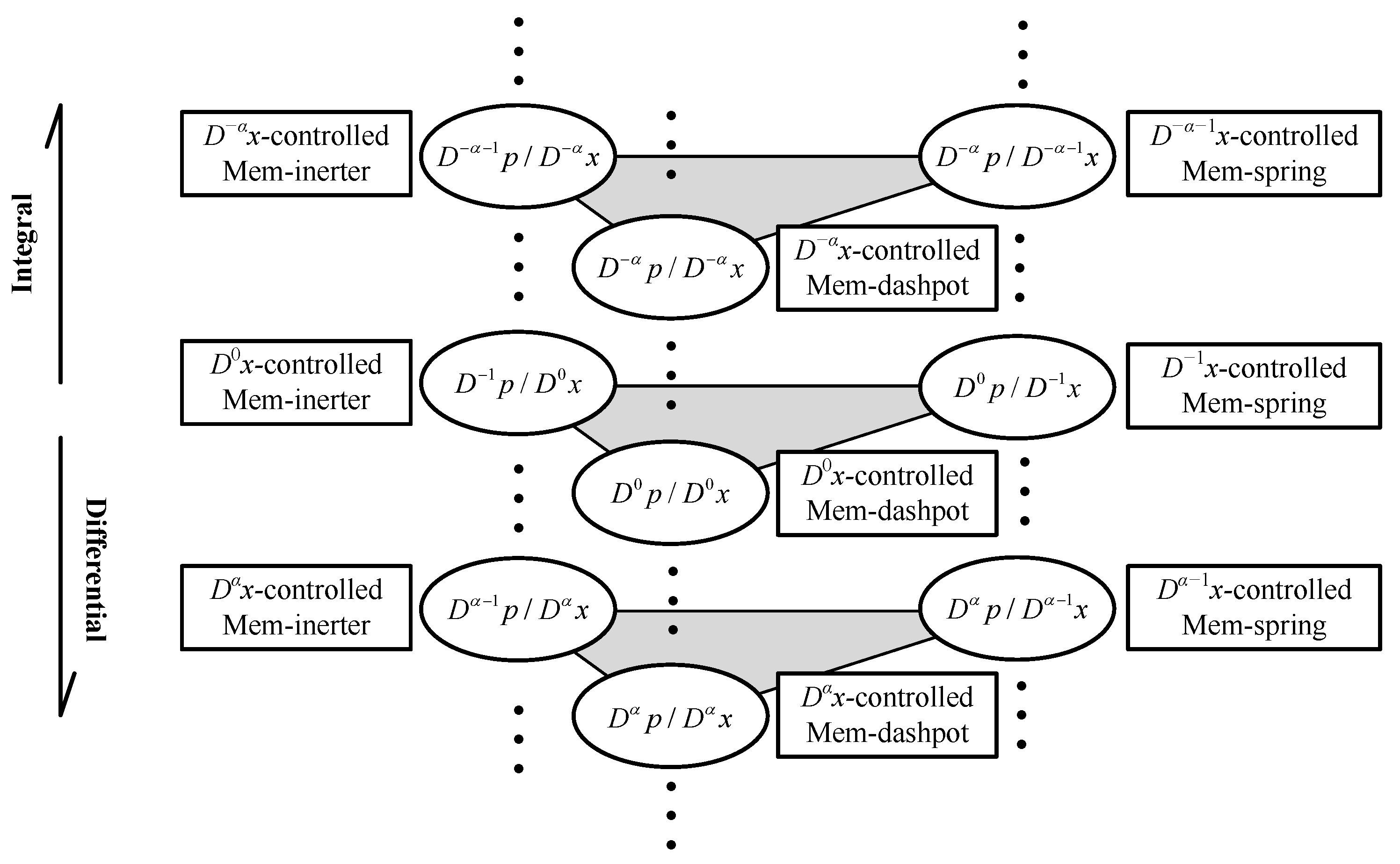
Generalizing
Figure 1, a three-dimensional periodic table of mechanical memory elements is proposed, as shown in
Figure 2, where
and
represent the
-order derivatives of momentum
p and displacement
x, respectively. It is worth mentioning that
can be any real number, and fractional-order memory elements are also included in the periodic table. In the case that
is an integer, the element is a conventional integer-order memory element.
3. Self-Adjointness of Mechanical System Dynamics
The dynamic behavior of any mechanical system consisting of conventional, possibly nonlinear, dampers, springs, and inerters is basically determined by Newton’s laws of motion and the constitutive relationships between the elements. In many cases, this results in differential equations that take the following form
where
, and
represents a column vector of momentums or displacements and
and
represent the first-order and second-order time-domain differentiation of variable
x, respectively.
The system of differential Equation (
8) allows a Lagrangian description if a Lagrangian
can be found that satisfies
In mechanics, it is known that the existence of a Lagrangian
depends on the fact that the system of differential Equation (
8) is self-adjoint, which for the present form is equivalent to the following set of integrability conditions:
Furthermore, differential Equation (
8) can be generalized using fractional calculus and subsequently rewritten as follows:
where
and
denote the left and the right Caputo fractional derivative of
x, respectively, which can be expressed as
and
Similarly, the system of differential Equation (
14) allows a Lagrangian description if a Lagrangian can be found that satisfies
3.1. Conventional Conservative Mechanical System
From the perspective of Lagrangian, it is well known that for a large class of mechanical systems consisting of displacement-controlled springs and velocity-controlled inerters, the differential Equation (
8) can be expressed as
For this case, the Lagrangian equals the total kinetic co-energy stored in the inerters, , minus the total potential energy stored in the springs, .
On the other hand, if the springs are force-controlled and the inerters are momentum-controlled, the so-called co-Lagrangian equation can be obtained, namely,
where the co-Lagrangian
equals the total potential co-energy stored in the springs,
, minus the total kinetic energy stored in the inerters,
.
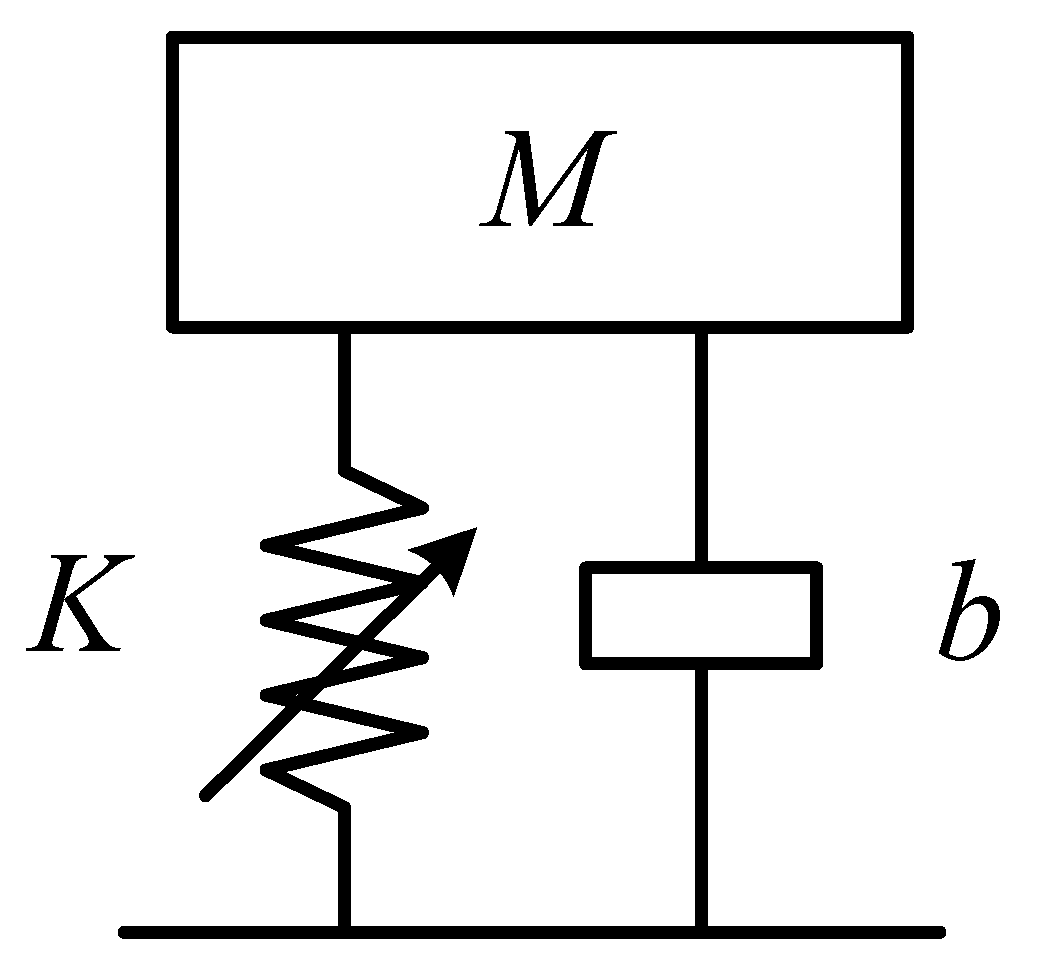
As an illustration, consider a mechanical system consisting of a nonlinear conventional displacement-controlled spring with a constitutive relationship
, a linear inerter, and a mass, as shown in
Figure 3.
The Lagrangian of the system reads
which, upon substitution into (
18), yields the equation of motion
.
Dually, if the nonlinear displacement-controlled spring is replaced by a nonlinear force-controlled spring,
needs to be considered to obtain the equation of motion
.
3.2. Conventional Nonconservative Mechanical System
The dissipation of conventional dampers in the mechanical system results in nonconservative dynamics that are not self-adjoint. Therefore, dampers cannot be included using a (standard) Lagrangian function. To solve such a problem, a so-called content function is usually introduced, which is a nonlinear multi-domain generalization of the Rayleigh dissipation function.
As an example, a damper with a constant damping coefficient of
c is added to the system of
Figure 3 in parallel with the spring and the inerter. In that case, the equation of motion extends to
, so that
and
.
For the case of
, the conditions (
10)–(
13) are obviously satisfied, but if
, condition (
13) is violated and no Lagrangian can be associated with the system. On the other hand, the introduction of a function of the form
, satisfying
can solve this problem. However, the variational character of the dynamics that makes the Lagrangian form so attractive clearly disappears.
Note that the existence of the content function depends on the dampers in the mechanical system being velocity-controlled. The inclusion of force-controlled dampers requires the introduction of a co-content function .
Furthermore, generalizing Equation (
22) to fractional form, leads to
6. An Example: Vehicle Shimmy System with Mem-Inerters
In order to intuitively compare the differences in modeling results of mechanical systems containing memory elements via the Lagrangian method and the integrated Lagrangian method, a vehicle shimmy system with mem-inerters is presented as an example in this section.
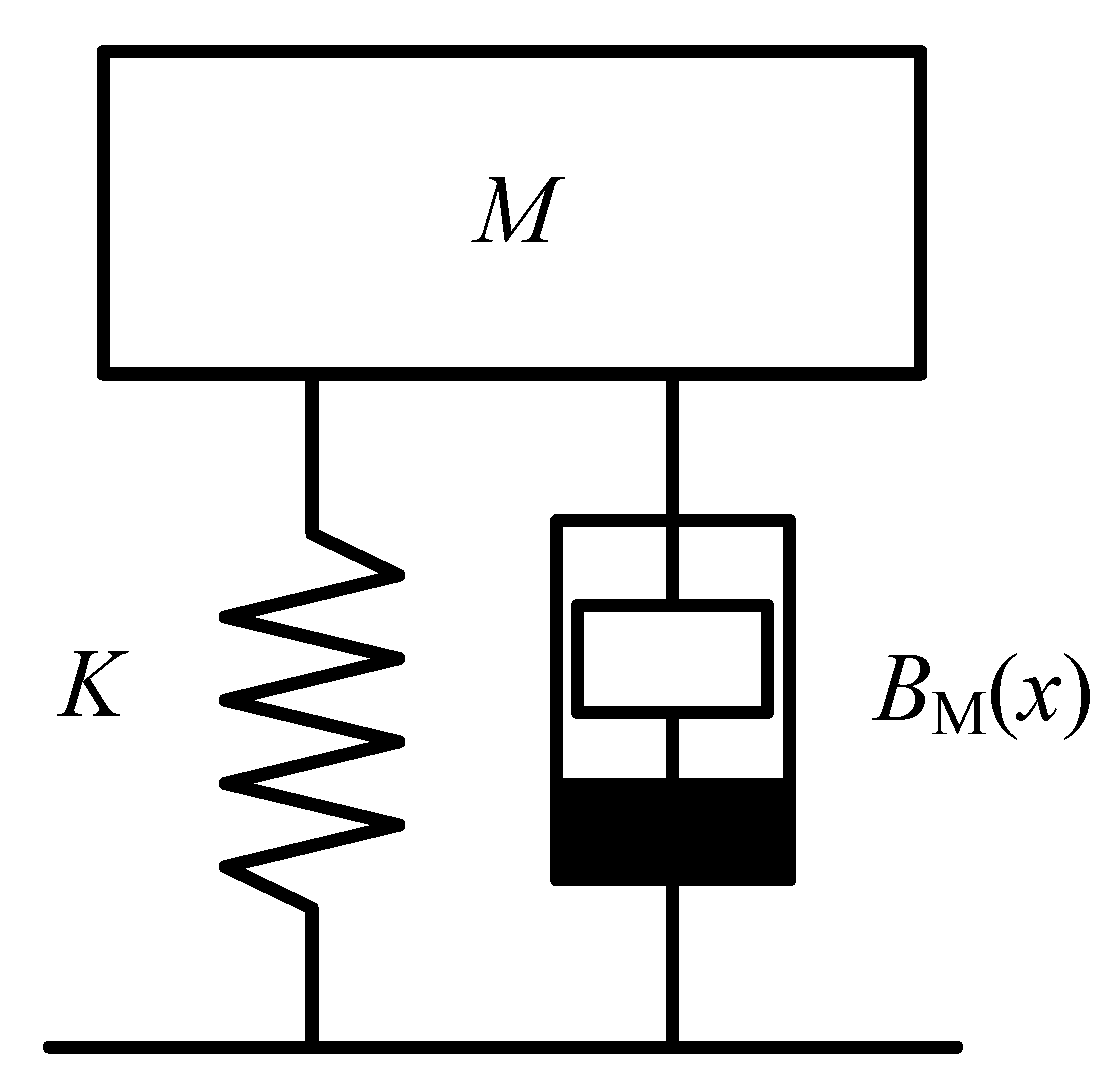
6.1. Displacement-Dependent Fluid Mem-Inerter
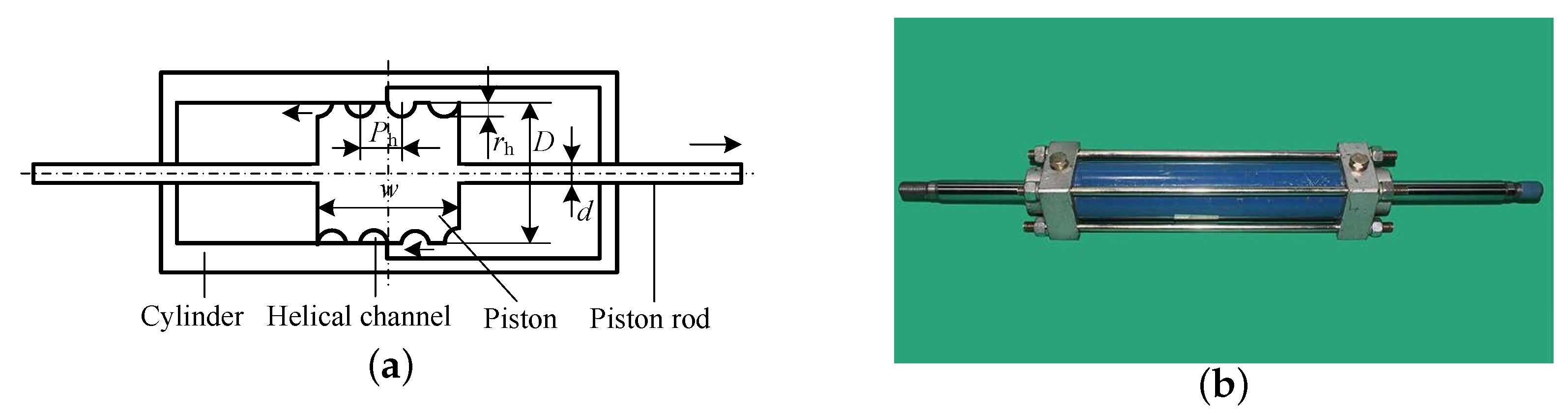
A displacement-dependent fluid mem-inerter shown in
Figure 5 is selected as the mem-inerter in the vehicle shimmy system, which was proposed and manufactured by Zhang et al., in 2018 and 2020, respectively [
6,
7].
The constitutive relationship of the mem-inerter,
, can be specifically expressed as
where
w and
x denote the piston width and the relative displacement between the cylinder and the piston, respectively.
It can be obtained that the incremental mem-inertance of the mem-inerter is of the form
where
is the fluid density, and the effective cross-sectional area of the piston
, the channel cross-sectional area
and the channel length function
are as follows:
where
D,
d,
, and
are the piston diameter, the piston rod diameter, the helical channel radius, and the helix pitch, respectively.
Furthermore, the parameter
in (
52) can be expressed as
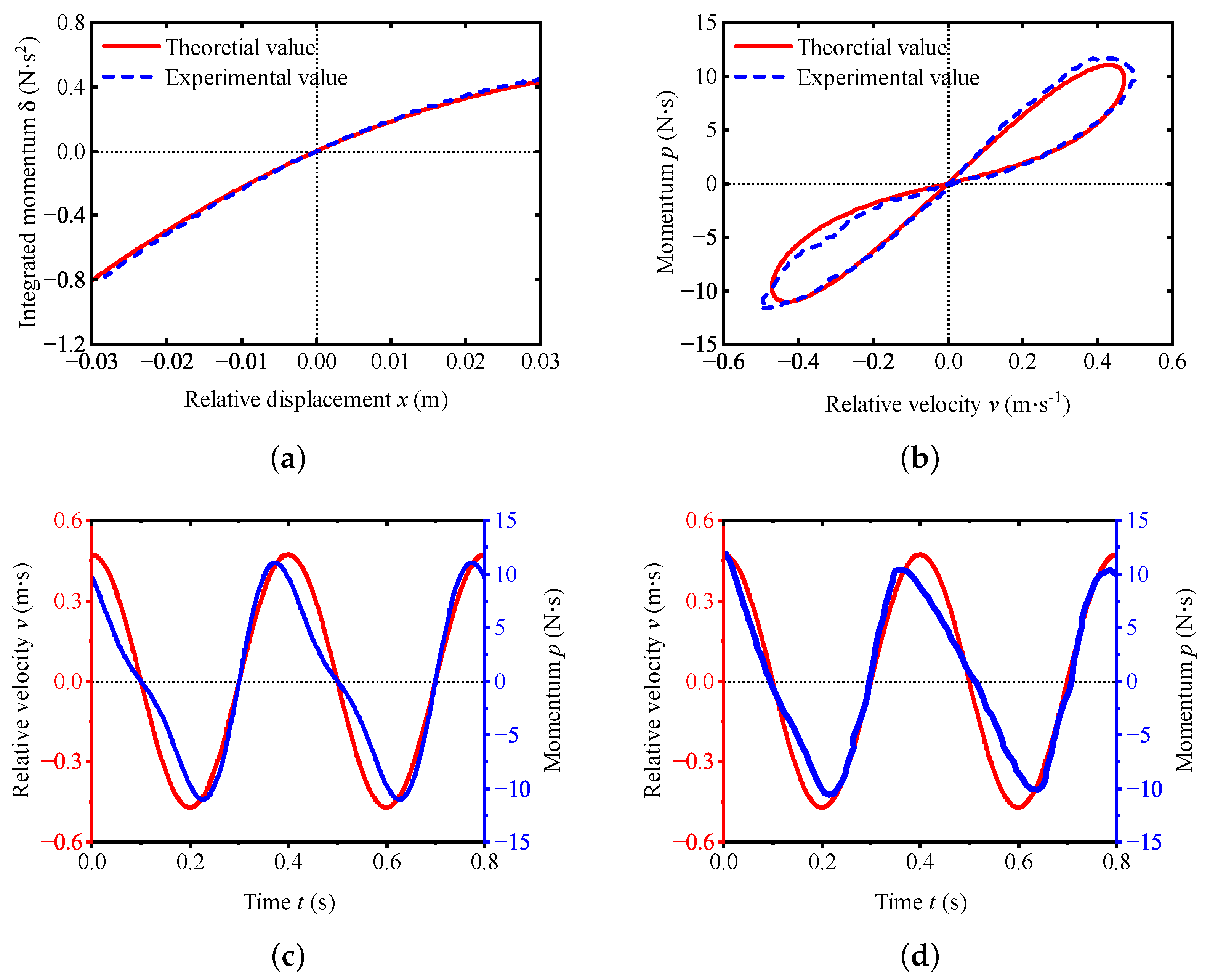
The structural parameters of the fluid mem-inerter device are demonstrated in
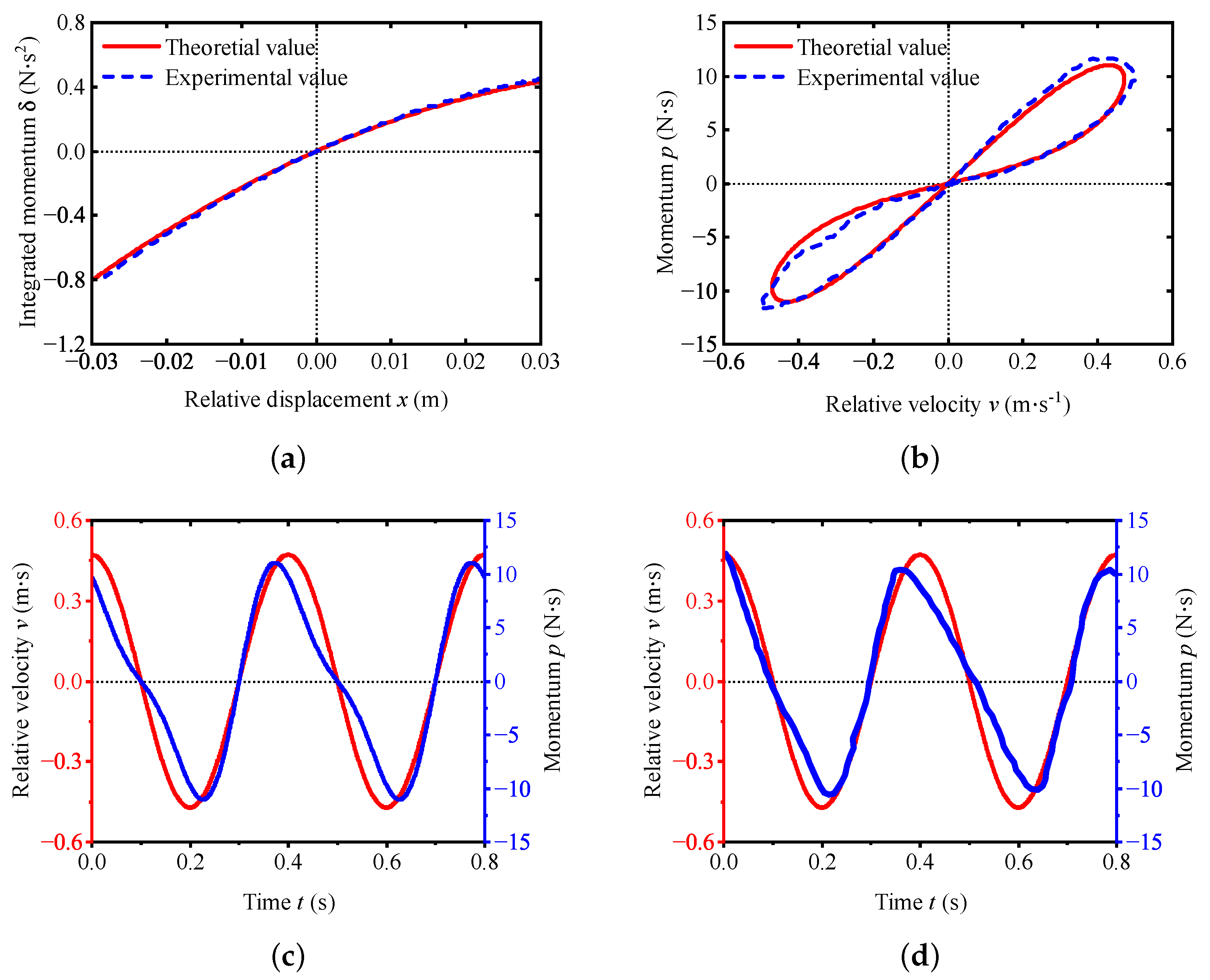
Table 1, and the memory characteristic curves obtained by numerical simulation are compared with the experimental data, as shown in
Figure 6.
Figure 6a shows a one-to-one correspondent relationship in the integrated momentum versus displacement plane, which is also the constitutive relationship plane of the mem-inerter, and the curve shows significant nonlinearity. Plotting the loci of
in the
plane, as shown in
Figure 6b, one can obtain the pinched hysteresis loop, which has been identified as the fingerprint of memory elements. Observe from
Figure 6c,d that whenever the waveform of the velocity
crosses the time axis, the waveform of the momentum
must cross the time axis at the same instants of time. Such a feature is called the coincident zero-crossing signature by Chua, which is a more general experimental memory element identification scheme. Comparing the theoretical data and experimental data in
Figure 6, although the curves are not smooth, the memory characteristics can still be identified and it is also in good agreement with the theoretical data.
6.2. Mathematical Modeling
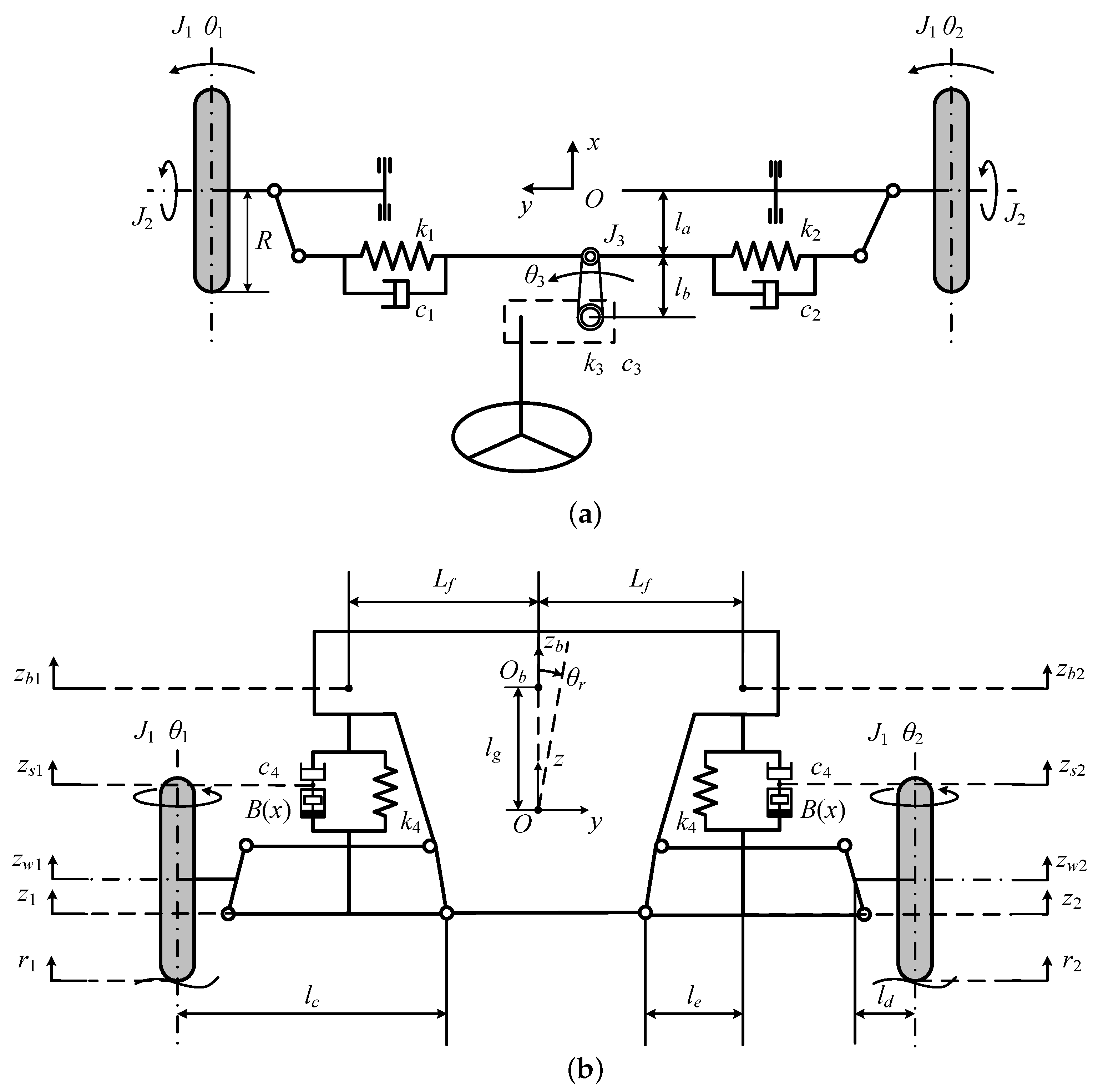
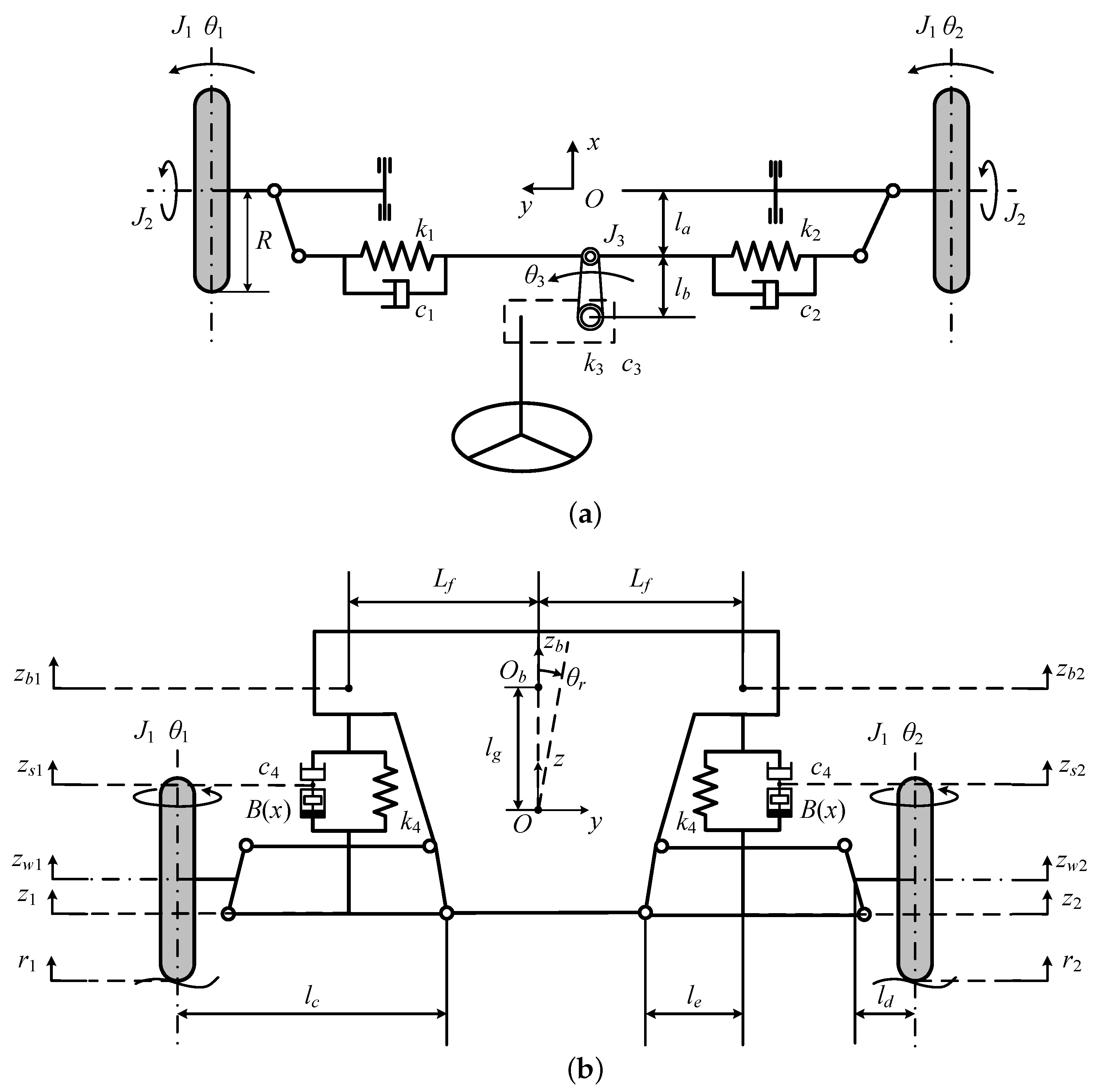
The mechanical model of the vehicle shimmy system equipped with mem-inerters and the parameters related to the structural dimensions of the vehicle marked on the model are shown in
Figure 7. In which,
O represents the center of gravity (COG) of the vehicle shimmy model, while
represents the COG of the sprung mass:
is half of the distance between the two connection points of the front suspension and the vehicle body; is the moment arm of the steering rod acting on the kingpin; is the moment arm of the steering tie rod acting on the pitman arm; is the length of the lateral swing arm of front suspension; is the distance from the intersection point of the kingpin extension line and the ground to the wheel symmetry plane; is the horizontal distance between the connection point between the suspension and the vehicle body and the connection point between the vehicle body and the suspension arm; is the vertical distance between the O and ; R is the diameter of the wheels.
The shimmy model has seven degrees of freedom (DOF): and are the shimmy angles of the left and right front wheel, is the swing angle of the pitman arm, is the vertical displacement of the sprung mass, and are the vertical displacements of the left and right front wheel, and is the roll angle of the vehicle body. In addition, and denote the vertical displacement of the nodes between the mem-inerter and the damper of left and right front suspension
The mathematical model of vehicle shimmy with mem-inerters can be formulated via the integrated Lagrangian equations, which can expressed as
where
,
represents the integrated kinetic co-energy of the system,
represents the integrated potential energy of the system,
represents the integrated dissipative energy of the system,
represents the generalized force acting on each DOF of the system, and
represents the generalized coordinate of the system, which is as follows:
.
Let
,
,
, and
denote the time integrals of angle
, vertical displacement
, running speed
, and road displacement excitation
of the system, respectively,
The integrated kinetic energy of the system can be expressed as
where
and
are the inertia moments of front wheels around diameters and spin axes, respectively;
is the inertia moment of the pitman arm;
is the inertia moment of the sprung mass about its roll axis;
and
are the mass of sprung mass and wheels, respectively.
The integrated potential energy of the system can be given by
where
and
denote the stiffness of left and right steering tie rods, respectively;
denotes the stiffness of the pitman arm;
denotes the stiffness of the front suspensions;
denotes the tire vertical stiffness.
The integrated dissipative energy can be expressed as
where
is the equivalent damping of front wheels around their kingpins;
and
are the damping of left and right steering tie rods, respectively;
is the damping of the pitman arm;
is the damping of front suspension.
The generalized forces corresponding to each DOF of the system can be expressed as
where
and
represent the lateral forces of the front wheels, respectively, and
e represent the pneumatic trail of the tire.
Substituting (
59)–(
66) into (
58), the differential equations of the system can be derived as follows:
In the study of vehicle shimmy, tires are also an important factor. Therefore, Pacejka’s Magic Formula [
36] is chosen as the nonlinear tire model in this study, and the tire lateral force can be represented in the form
where
is the slip angle of the wheel,
B is the stiffness factor,
C is the shape factor,
D is the peak value,
E is the curvature factor,
is the horizontal shift, and
is the vertical shift. Here, let
and
, and parameters
B,
C,
D and
E can be calculated by
where
is the vertical load acting on the wheels,
is the camber angle of the wheels, and the parameters
,
,
,
,
,
,
, and
are all constants determined for each tire. In this study, the value of
is 0, and the values of
,
,
,
,
,
,
, and
are listed in
Table 2 [
37,
38,
39].
Assuming that the vehicle has no lateral acceleration, the vertical loads acting on the left-front wheel
and the right-front wheel
are as follows:
where
is the static vertical load acting on the front wheels, which can be obtained by
where
a and
b represent the distance from the COG of the vehicle to its front and rear axle, respectively.
The constrain between the slip angle and the shimmy angle of the front wheel can be given as
where
is the relaxation length of tires and
is the half-length of the tire contact area. In this study,
is equal to
and
is equal to
.
6.3. Simulation Analysis
To verify the accuracy improvement of the integrated Lagrangian method in modeling the vehicle shimmy system with mem-inerters and to study the influence factor of error between the Lagrangian method and integrated Lagrangian method, simulation analysis and comparison are performed under pulse and random excitation, respectively.
Body acceleration, suspension working space, dynamic tire load, body roll angle acceleration, the shimmy angle of the front wheels and the swing angle of the pitman arm, which are the main evaluation indicators of a vehicle shimmy model, are selected as comparison indicators in simulation analysis. For the sake of conciseness, the body acceleration, suspension working space, dynamic tire load, and body roll angle acceleration are abbreviated as BA, SWS, DTL, and BRAA, respectively.
Let
,
and
represent the sprung mass under full-load, half-load and no-load conditions, respectively. In addition, the value of the remaining vehicle parameters are listed in
Table 3.
First, consider a pulse excitation of the form
where
,
, and
.
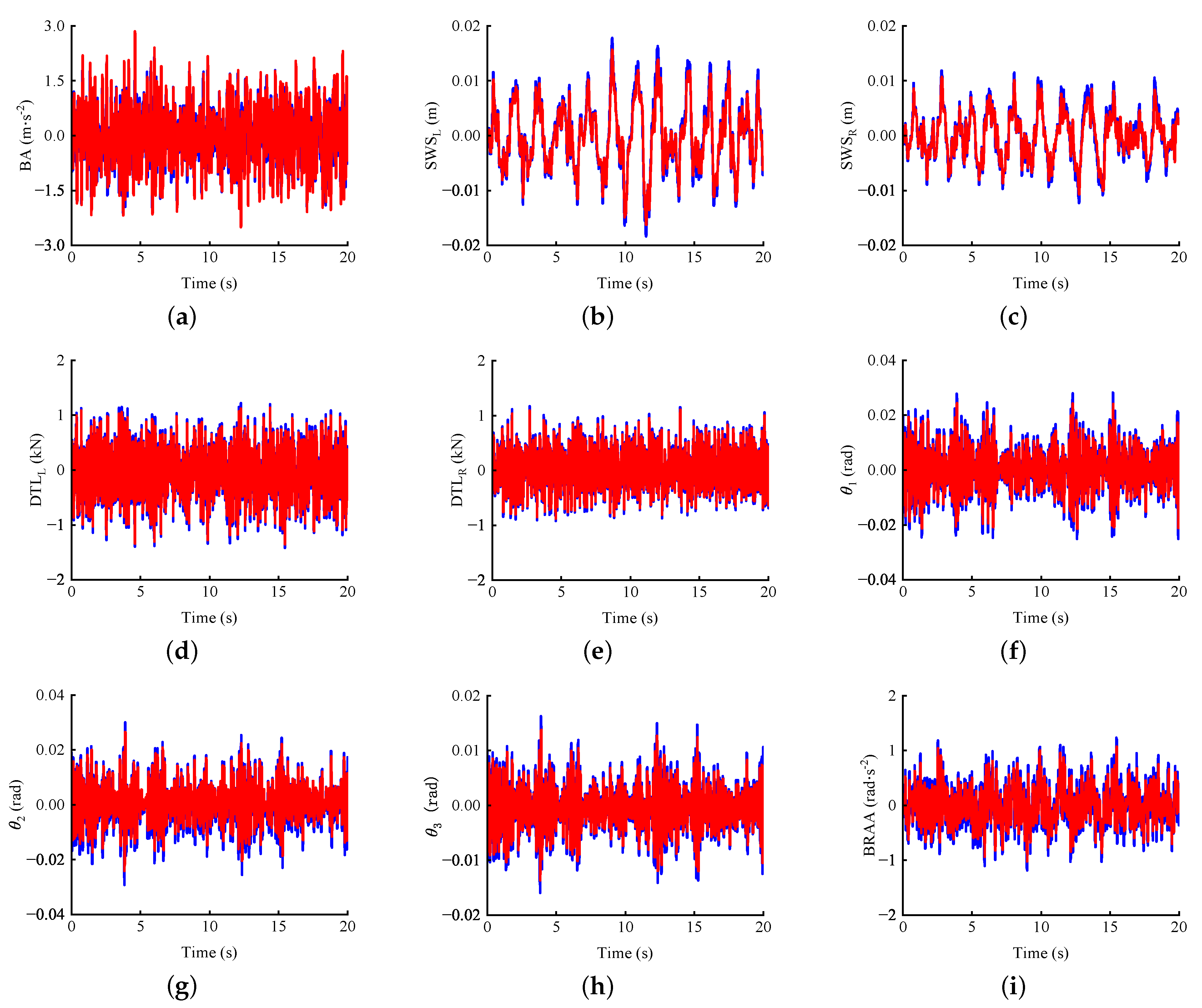
The time-domain responses of the system under no-load, half-load, and full-load conditions are studied, respectively. To avoid redundancy, only the results for the no-load case are shown in
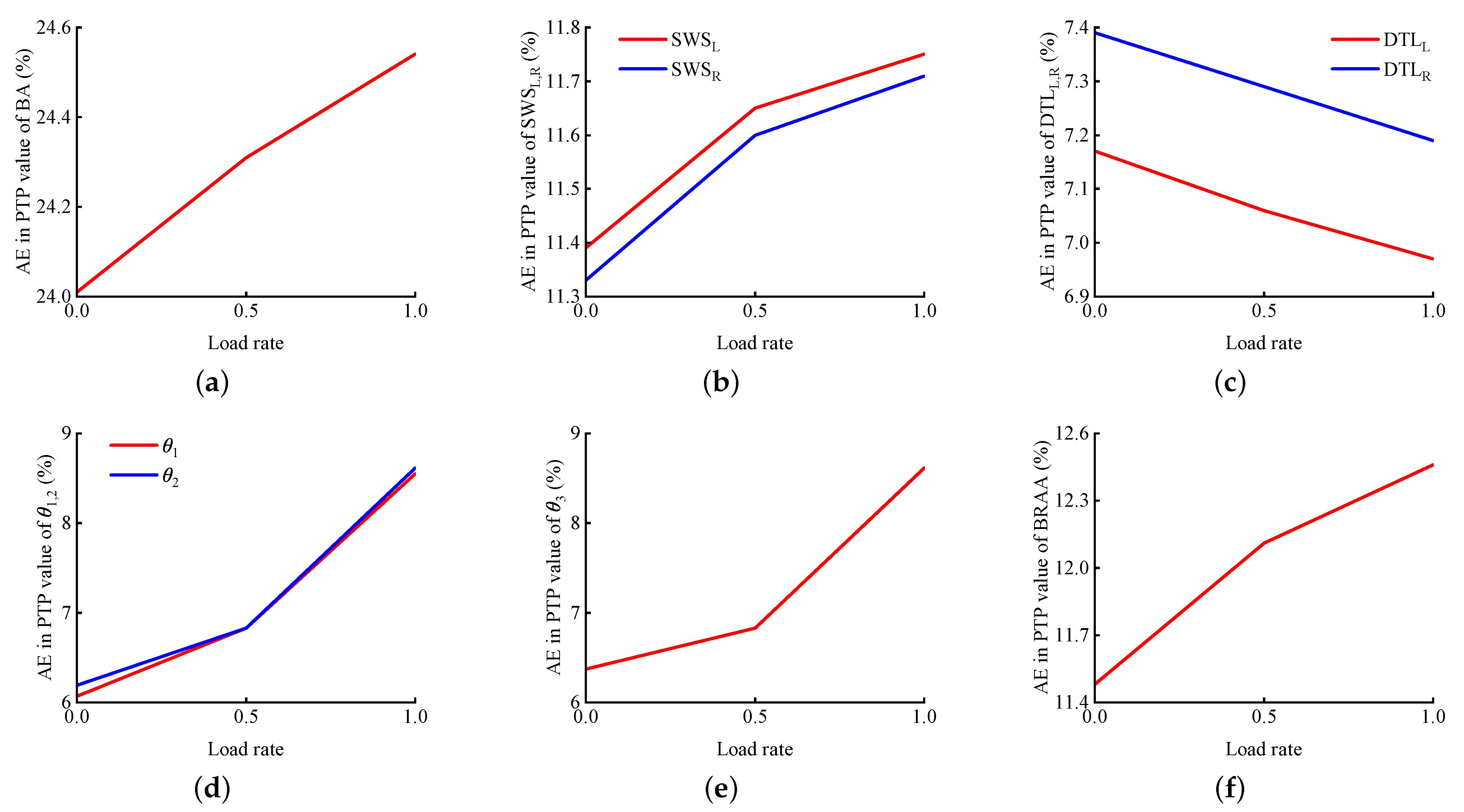
Figure 8. The peak-to-peak (PTP) values, calculated from
, where
denote the values of the signal in a period and the absolute value of the error (abbreviated as AE), are listed in
Table 4 and are shown as a line chart in
Figure 9.
Based on the data shown in
Figure 8 and
Table 4, compared with the integrated Lagrangian method (i.e., accurate values), each system indicator modeled using the Lagrangian method for the vehicle shimmy system with mem-inerters exhibits errors ranging from
to
. Such errors indicate that modeling mechanical systems equipped with memory elements using the Lagrangian method is inaccurate and cannot accurately represent the dynamical behavior of the systems. Furthermore, it can be seen from
Table 4 and
Figure 9 that, under pulse excitation, as the vehicle load increases, the PTP value errors in body acceleration, suspension working space, shimmy angle of the front wheels, swing angle of the pitman arm, and body roll angle acceleration increase, and the PTP value error of dynamic tire load decreases.
Since the road excitation is usually random, a time-domain model of random road excitation is established to discuss the errors of the system response obtained by these two modeling methods under random road excitation
where
is the cut-off frequency,
is the road unevenness coefficient, and
v is the vehicle speed,
is the integrated white noise. In this study, four cases are investigated, namely, (
1) Class A road profile, vehicle speed
, no-load; (
2) Class B road profile, vehicle speed
, no-load; (
3) Class B road profile, vehicle speed
, no-load; (
4) Class B road profile, vehicle speed
, full-load.
To avoid redundancy, only the results for case (
2) are presented in
Figure 10. The RMS values and the absolute value of errors of the time-domain response using the Lagrangian method and the integrated Lagrangian method are shown in
Table 5. According to
Figure 10 and
Table 5, compared with the integrated Lagrangian method, each of the system indicators modeled using the Lagrangian method for the vehicle shimmy system with mem-inerters results in errors ranging from
to
. This reaffirms the previous finding that modeling mechanical systems equipped with memory elements using the Lagrangian method is inaccurate and cannot accurately represent the dynamical behavior of such systems.
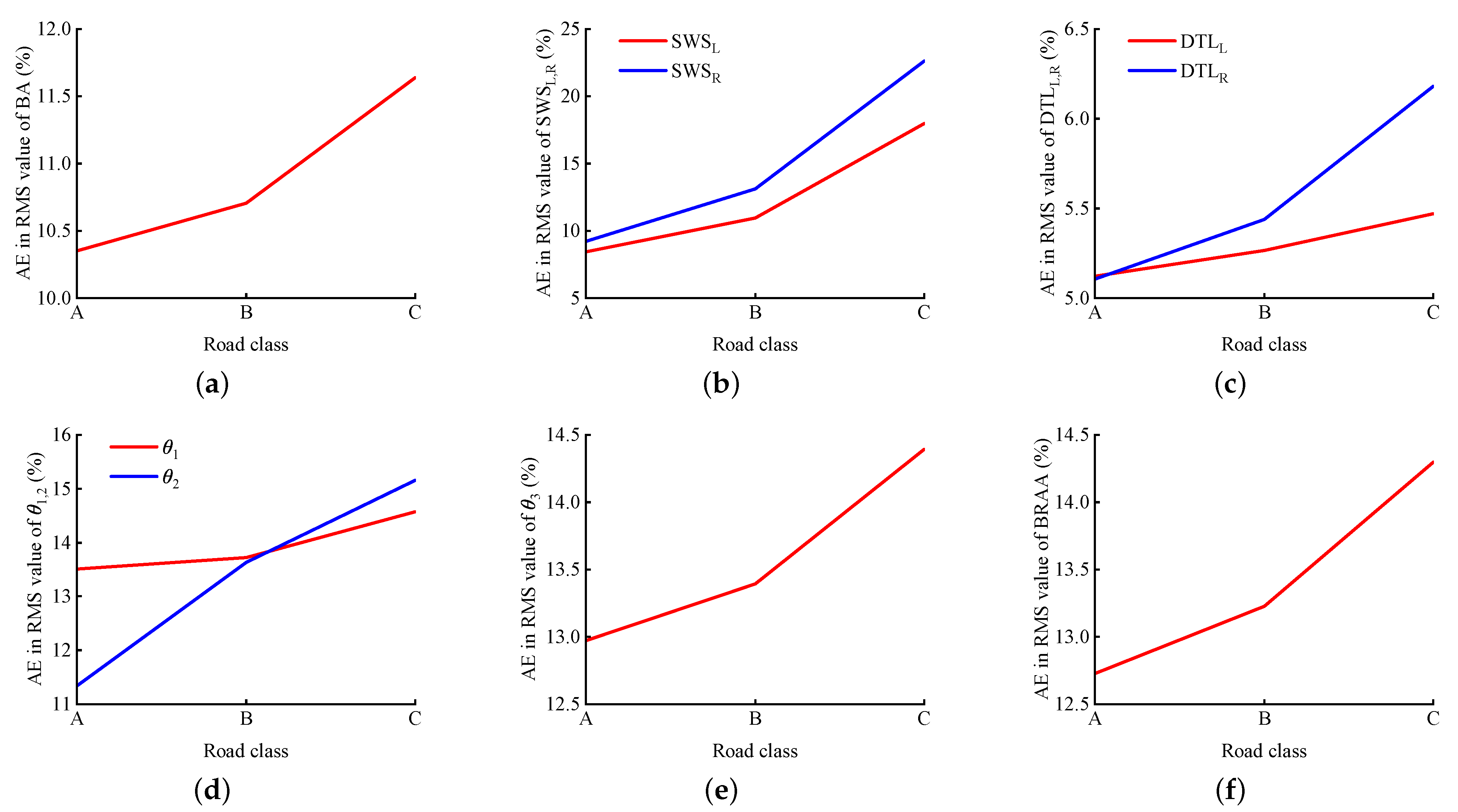
To study the influence of road roughness, vehicle speed, and load condition on the RMS value errors of system time-domain response under random excitation, the results are plotted in
Figure 11,
Figure 12 and
Figure 13. As can be seen from
Figure 11 and the data of cases (
1) and (
3) in
Table 5, the RMS value errors for each indicator between the Lagrangian method and the integrated Lagrangian method increase as the road unevenness increases, i.e., as the road condition deteriorates.
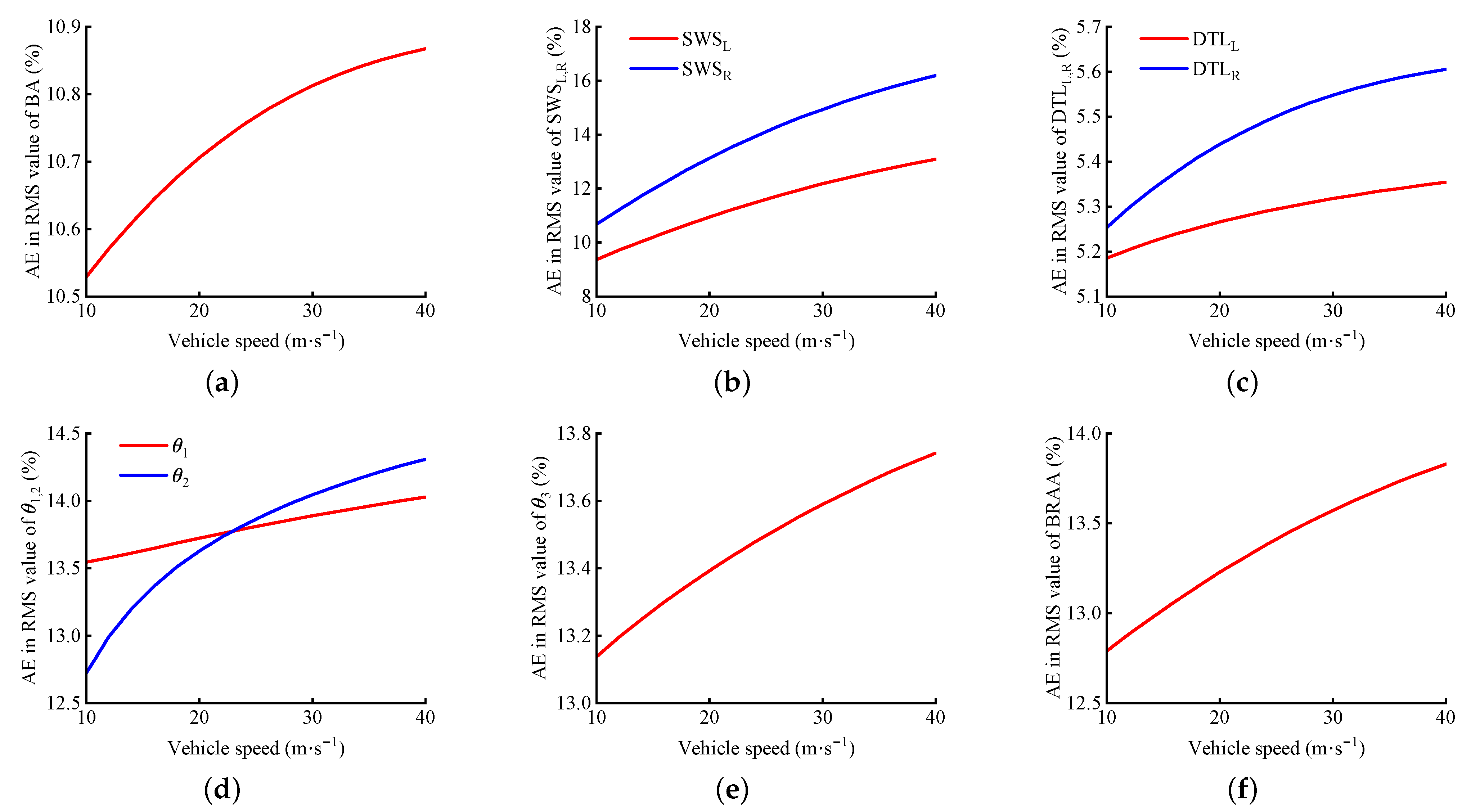
As shown in
Figure 12 and the data of cases (
2) and (
3) in
Table 5, the RMS value errors for each indicator between the Lagrangian method and the integrated Lagrangian method increase as the vehicle speed increases.
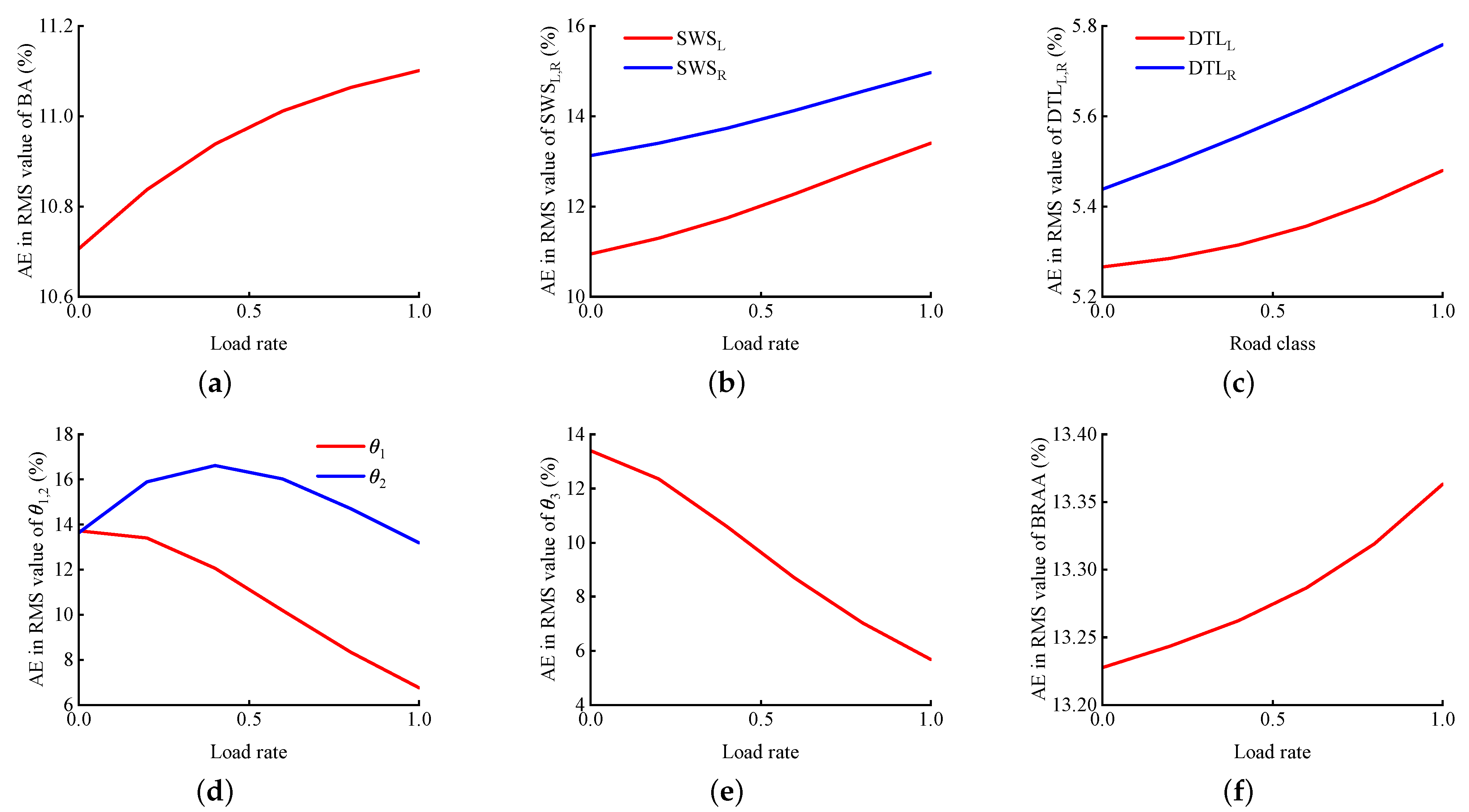
Figure 13 and the data of case (
3) and (
4) in
Table 5 show that, under random excitation, the RMS value error of BA, SWS, DTL, BRAA increase, the RMS value error of
and
decrease, and the RMS value error of
increases and then decreases with the increase in the vehicle load, where load rates of 0, 0.5, and 1 indicate no load, a half load, and a full load, respectively. The abnormal changes in
may be due to the complex nonlinearity of the system, which needs to be analyzed in future research.
7. Conclusions
In this paper, a novel modeling method, referred to as the integrated Lagrangian modeling method, is proposed to accurately describe the nonlinear dynamic behavior of the mechanical systems consisting of mem-inerters, mem-springs, and mem-dampers, together with their conventional linear counterparts. Based on the constitutive relationships of memory elements, the corresponding memory state functions are introduced, and then the Lagrangian of the system can be obtained based on the difference between two memory-state functions. In the case of a mechanical system that consists only of mem-inerters, mem-springs, and their conventional linear counterparts, the dynamic equations can be obtained from Hamilton’s least action principle. Mem-dampers and linear damping elements can be included by introducing an action function that plays a role similar to the Rayleigh dissipation function. Furthermore, this paper also briefly generalizes memory elements and their modeling to fractional calculus.
By comparing the results of using the classical Lagrangian method and the integrated Lagrangian method to model the vehicle shimmy system equipped with the fluid mem-inerter, the modeling accuracy improvement of the integrated Lagrangian method is verified. The results show that
Under pulse and random road excitation, there are obvious errors in each indicator of system modeling using the Lagrangian method compared to the results obtained using the integrated Lagrangian method (accurate values). The existence of such errors demonstrates the accuracy and necessity of using the integrated Lagrangian method to model mechanical systems with memory elements.
Under pulse excitation, as the vehicle load increases, the PTP value errors of BA, , and increase, and the PTP value error of decreases.
Under random excitation, the RMS value errors for each indicator increase as the road unevenness increases, i.e., as the road condition deteriorates; the RMS value errors for each indicator increase as the vehicle speed increases; the RMS value errors of BA, , , BRAA increase, the RMS value errors of and decrease, and the RMS value error of increases and then decreases with the increase in the vehicle load.
The integrated Lagrangian method provides a more accurate theoretical method for modeling and analysis of mechanical systems with memory elements. Refs. [
6,
7] proposed a fluid mem-inerter device and clarified its constitutive relationship in the
plane. Based on the research of [
6,
7], this paper applied the mem-inerter to the vehicle suspension system and conducted shimmy modeling analysis, pointing out an easily overlooked problem in that the classical Lagrangian method is not accurate for modeling the mechanical system with memory elements. As a next step, a more in-depth exploration of fractional-order memory elements and the application of fractional-order calculus in modeling mechanical systems with memory elements should be considered, and this method should be integrated with data-driven modeling in future research. Furthermore, the response results of the vehicle shimmy system under pulse and random excitation in the simulation analysis section also need to be experimentally verified in a future study.


 Integrated Lagrangian method;
Integrated Lagrangian method;  Lagrangian method.
Lagrangian method.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}