

Automated Maximum Torque per Ampere Identification for Synchronous Reluctance Machines with Limited Flux Linkage Information

 , ,
, ,  ,
,  and
and
Abstract
1. Introduction
- (a)
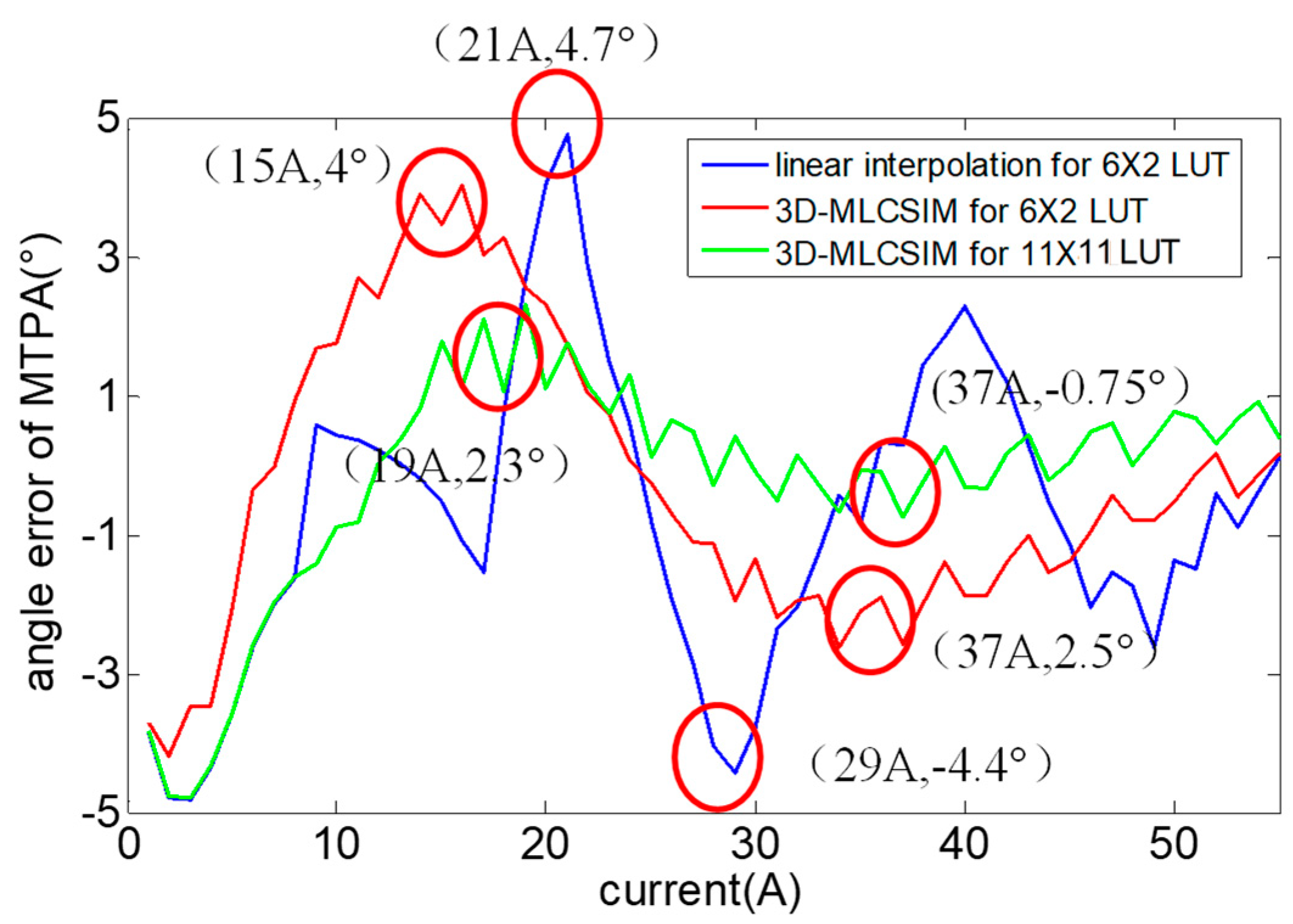
- The only required flux-linkage-map information is a 6 × 2 LUT, which can be acquired via simple experimental self-commissioning procedures.
- (b)
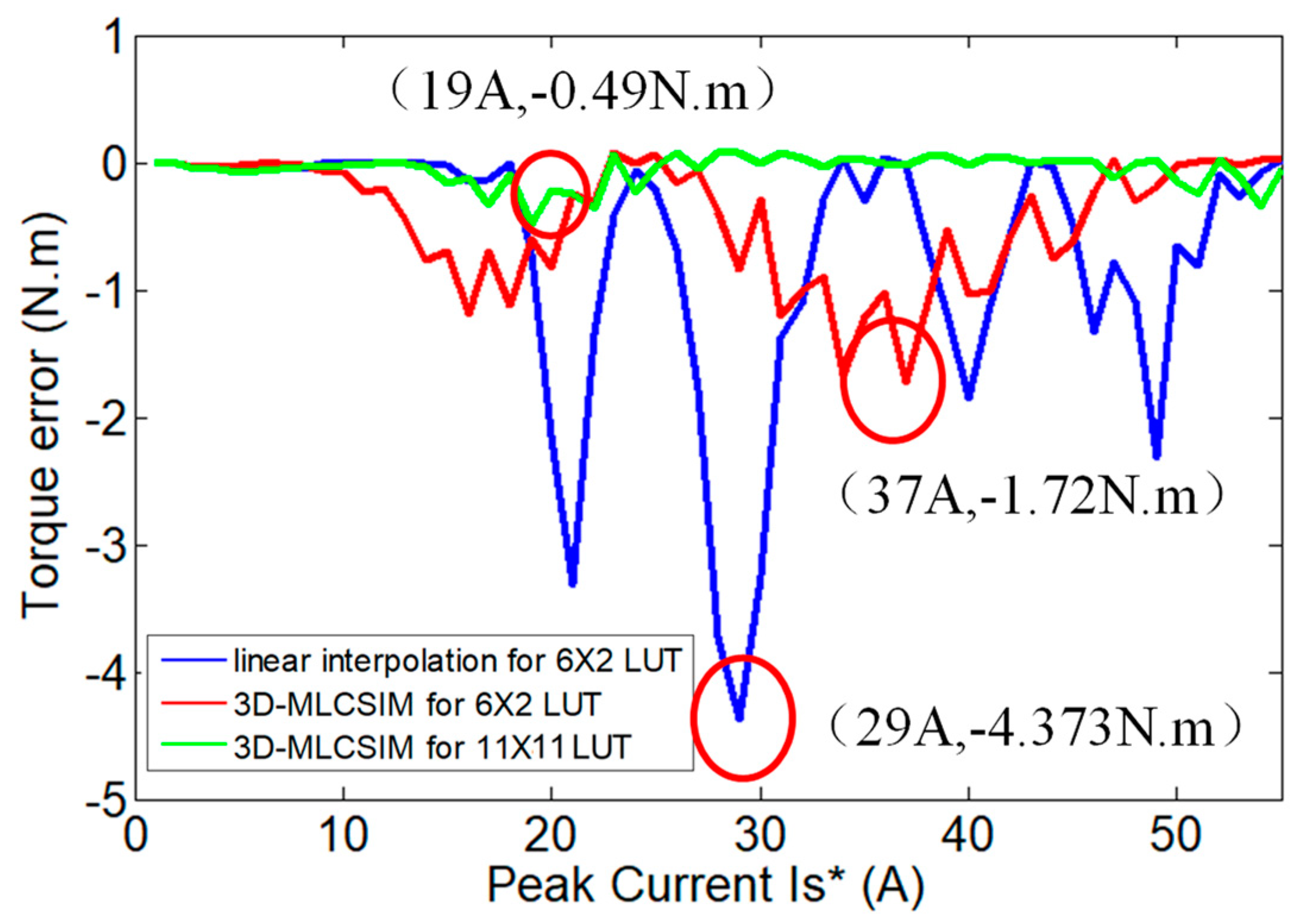
- Three-dimensional modified linear cubic spline interpolation method (3D-MLCSIM) can extend the three-dimensional flux-linkage map to tune the accuracy as required.
- (c)
- The proposed online golden section searching method (GSSM) has been proven to be a faster solution with only 11 iterations to search for an optimal MTPA operating point.
2. Model of the Synchronous Reluctance Machine
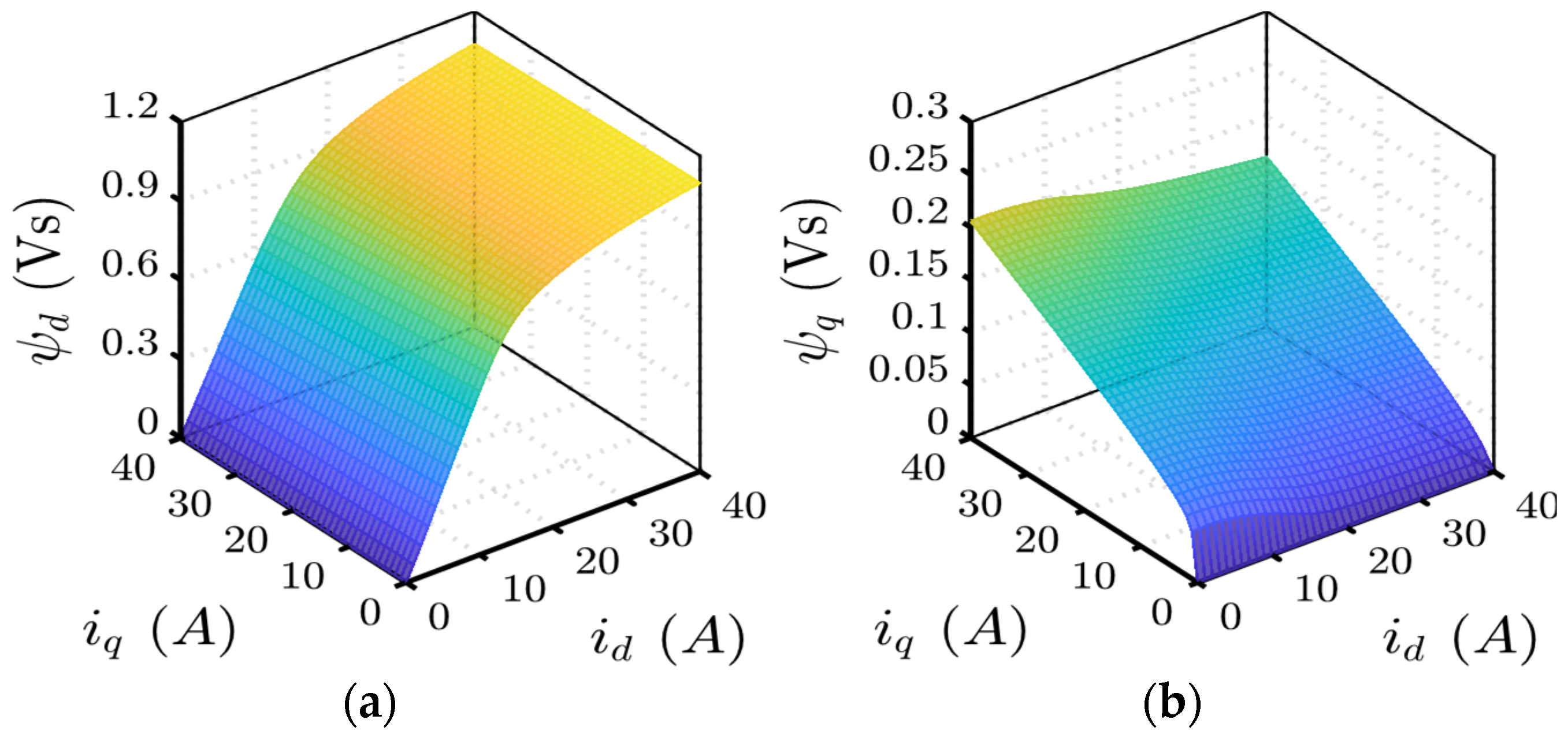
2.1. SynRM Model with Magnetic Saturation and Cross-Saturation Effect
2.2. MTPA Control
- (a)
- Traditional motor parameters, such as the dq-axis inductance and flux linkage, are considered constant and independent of the motor operating point. However, these parameters change with the input current under actual operating conditions.
- (b)
- (c)
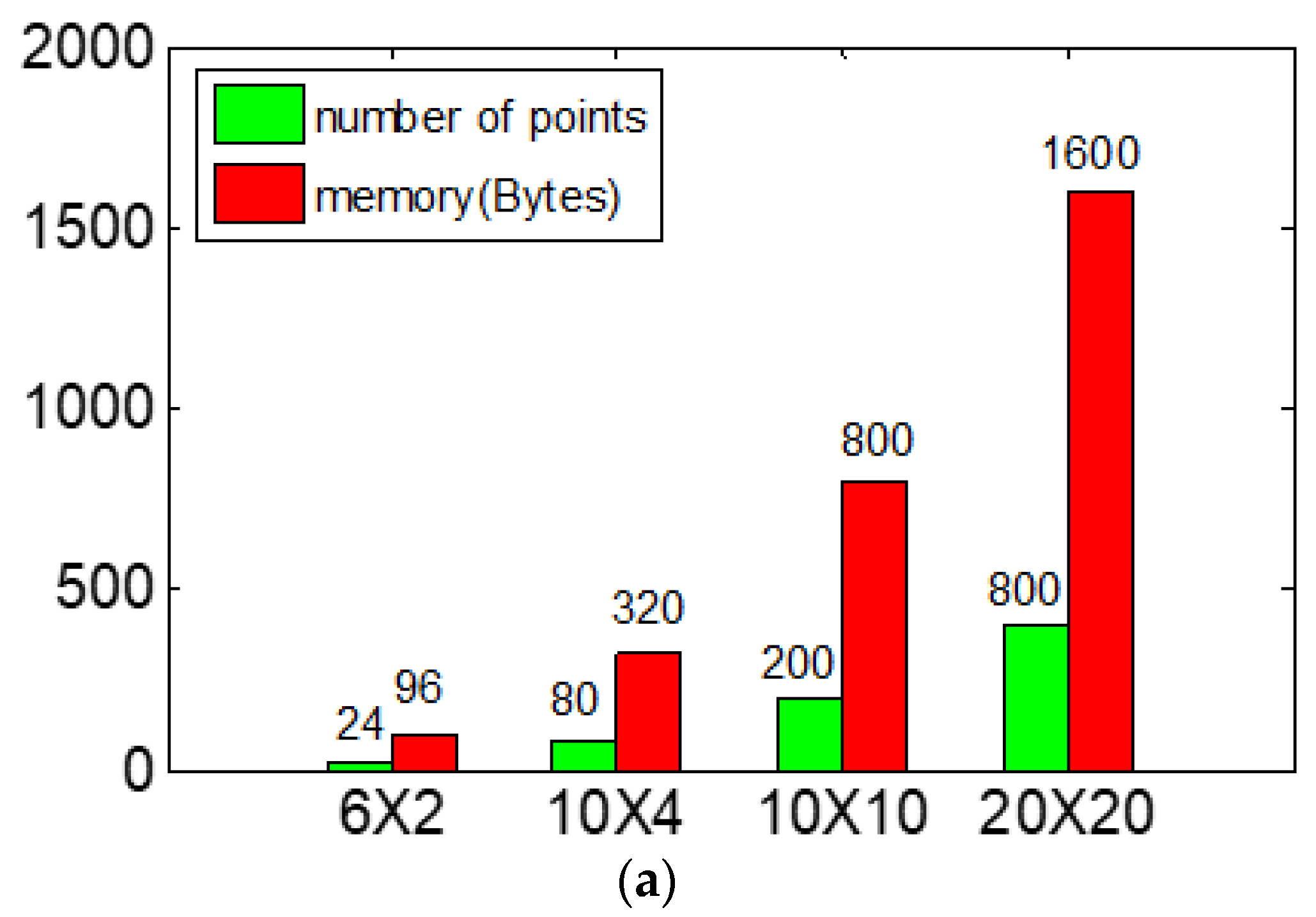
- The LUT method is commonly used, and these LUTs tend to be large with large memory because it is necessary to create separate MTPA tables based on inductance variation. Estimating MTPA with parameter variation requires considerable posting fitting work, which is time-consuming.
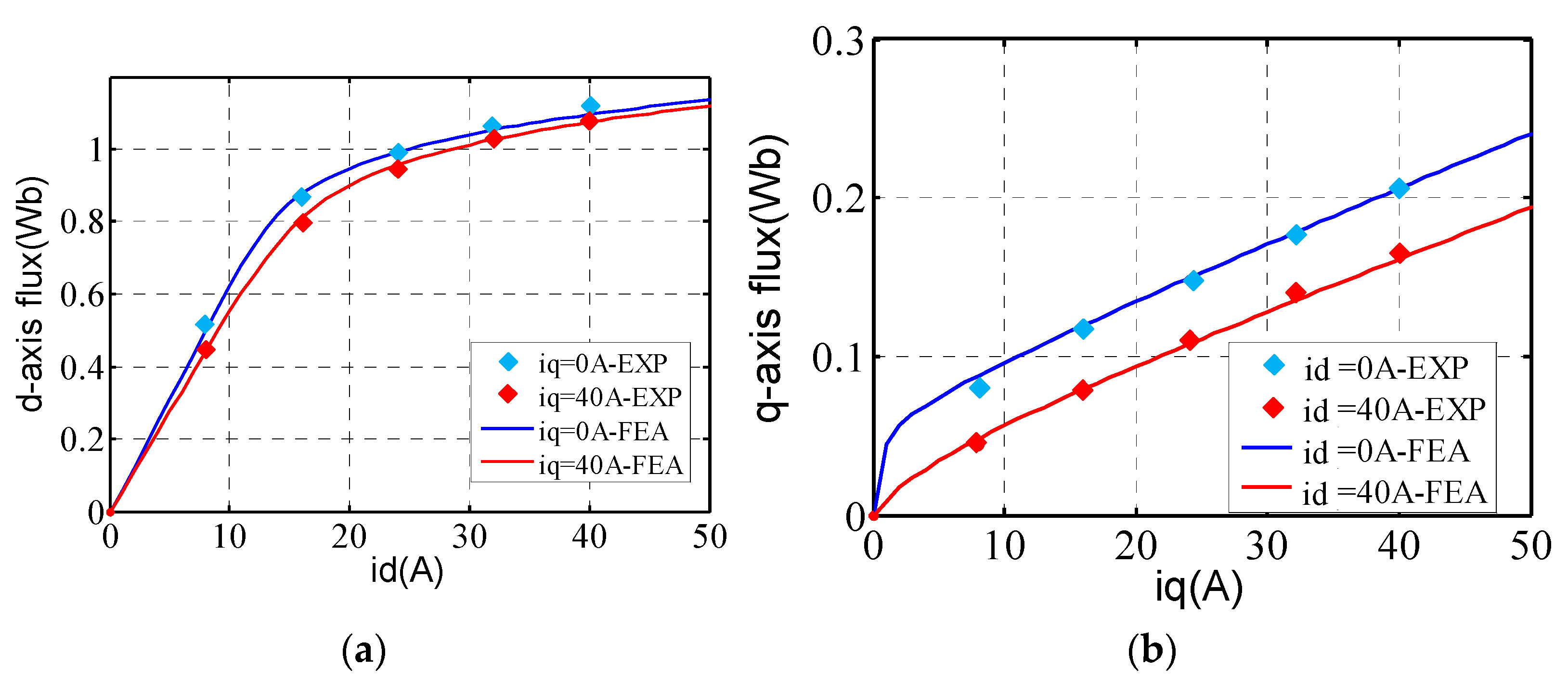
3. Flux Linkage Map Self-Identification
4. Proposed GSSM for MTPA
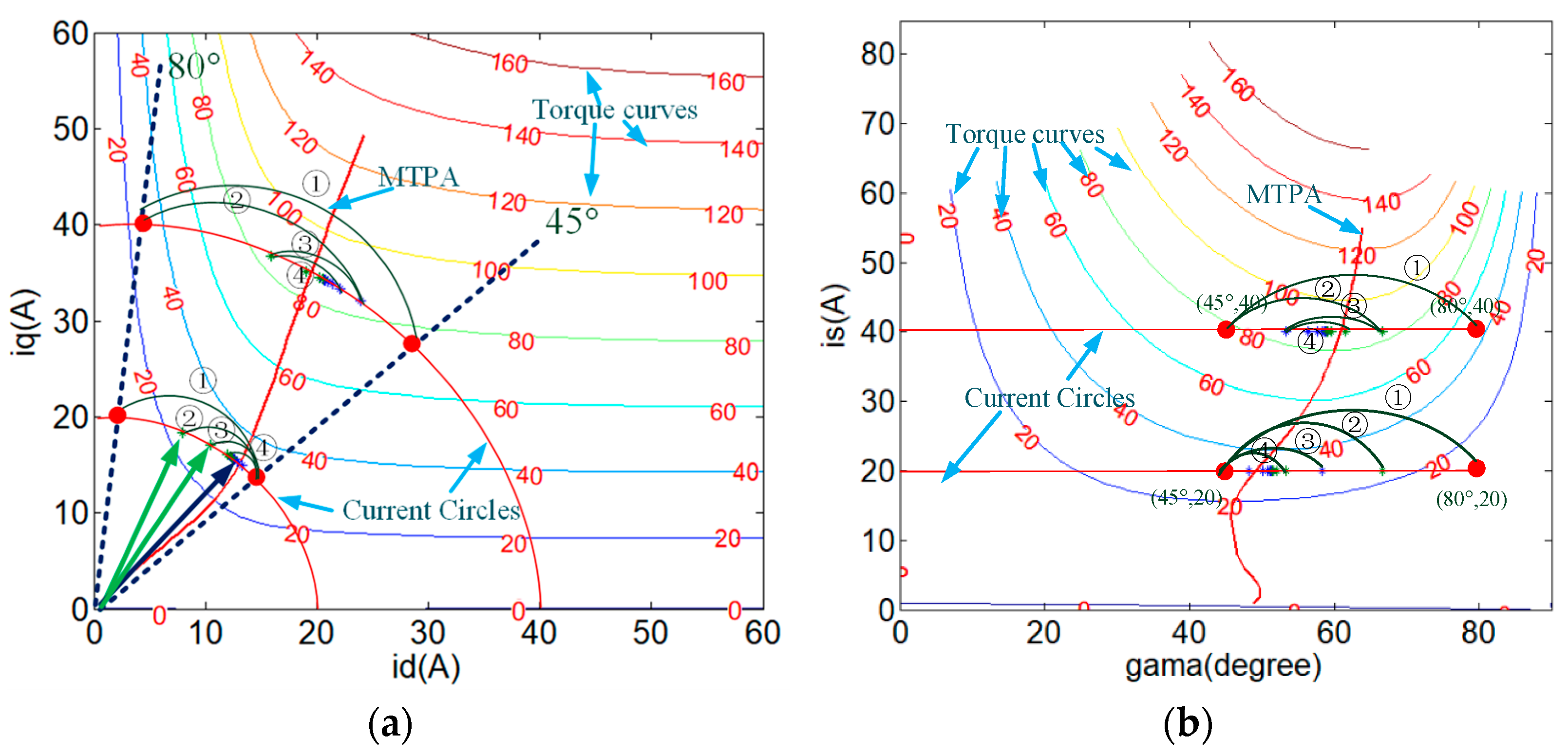
4.1. MTPA Curve on Polar Coordinates
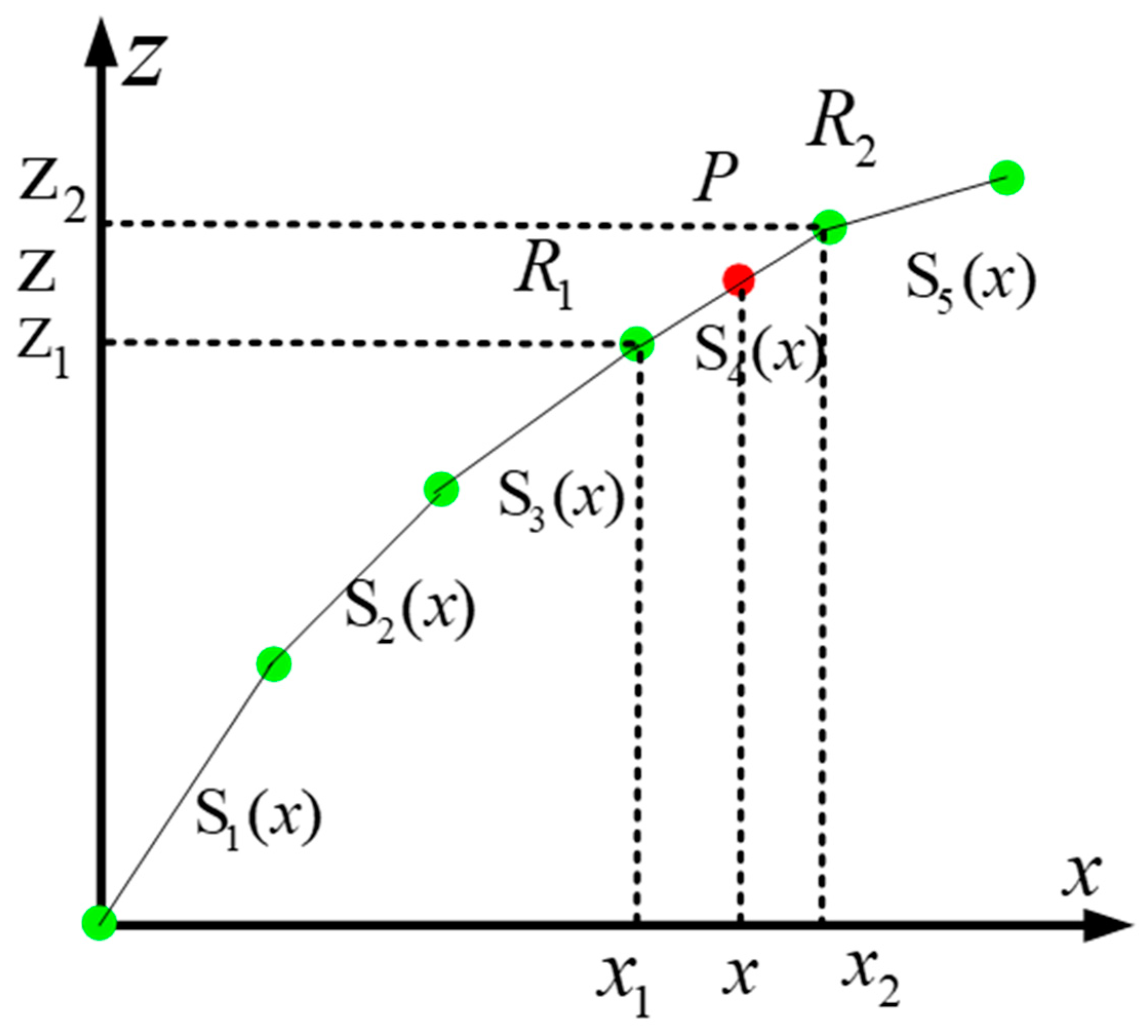
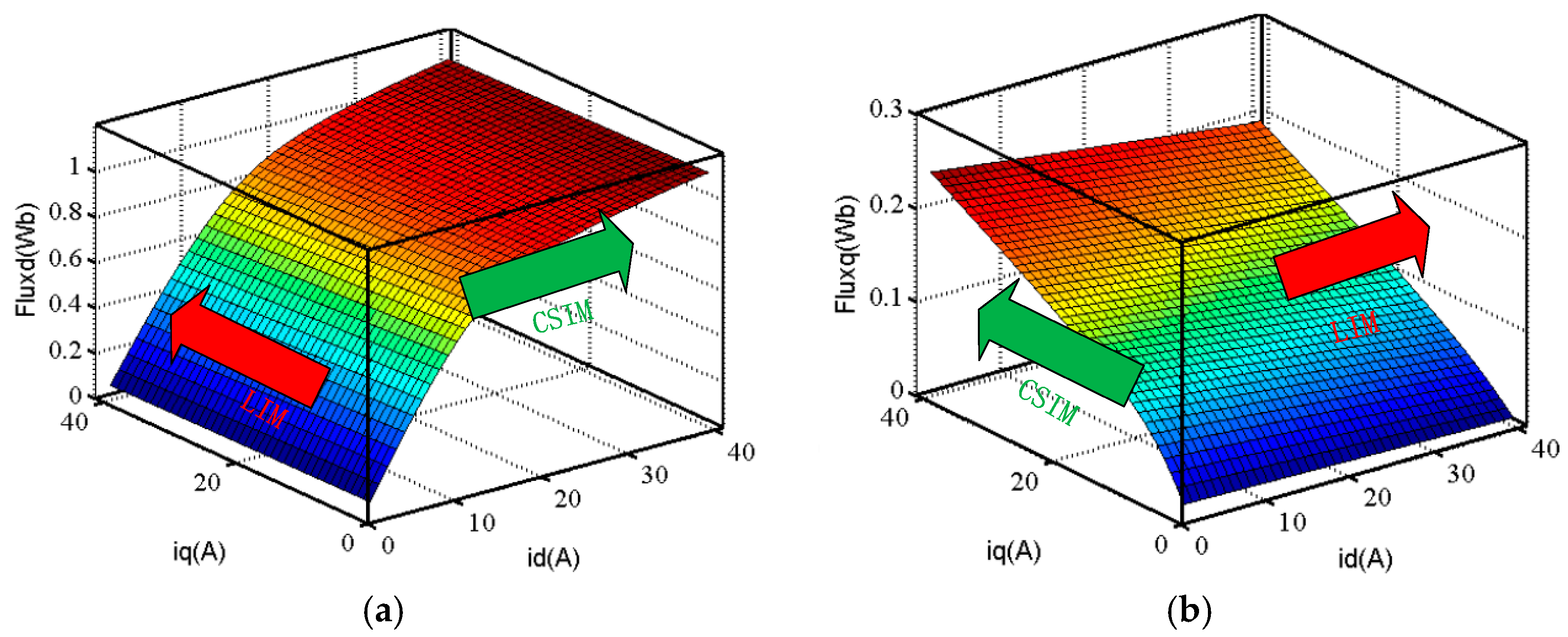
4.2. Modified Linear Cubic Spline Interpolation Method for Magnetic and Cross Saturation Effect
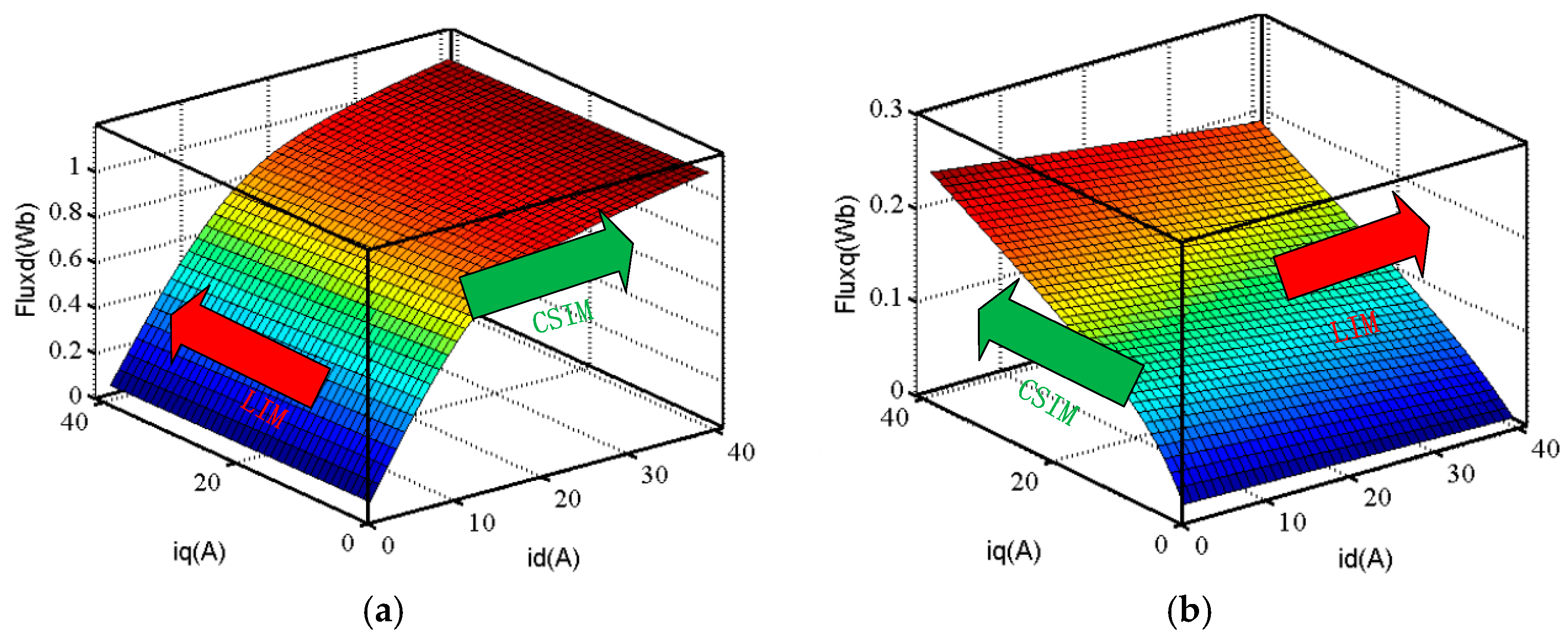
- The d-axis flux-linkage LUT was interpolated using the cubic spline interpolation method (CSIM) along the d-axis current input.
- The q-axis flux-linkage LUT was interpolated using the cubic spline interpolation method (CSIM) along the q-axis current input.
- The d-axis flux-linkage LUT was interpolated using the linear interpolation method (LIM) along the q-axis current input.
- The q-axis flux-linkage LUT was interpolated using the linear interpolation method (LIM) along the d-axis current input.
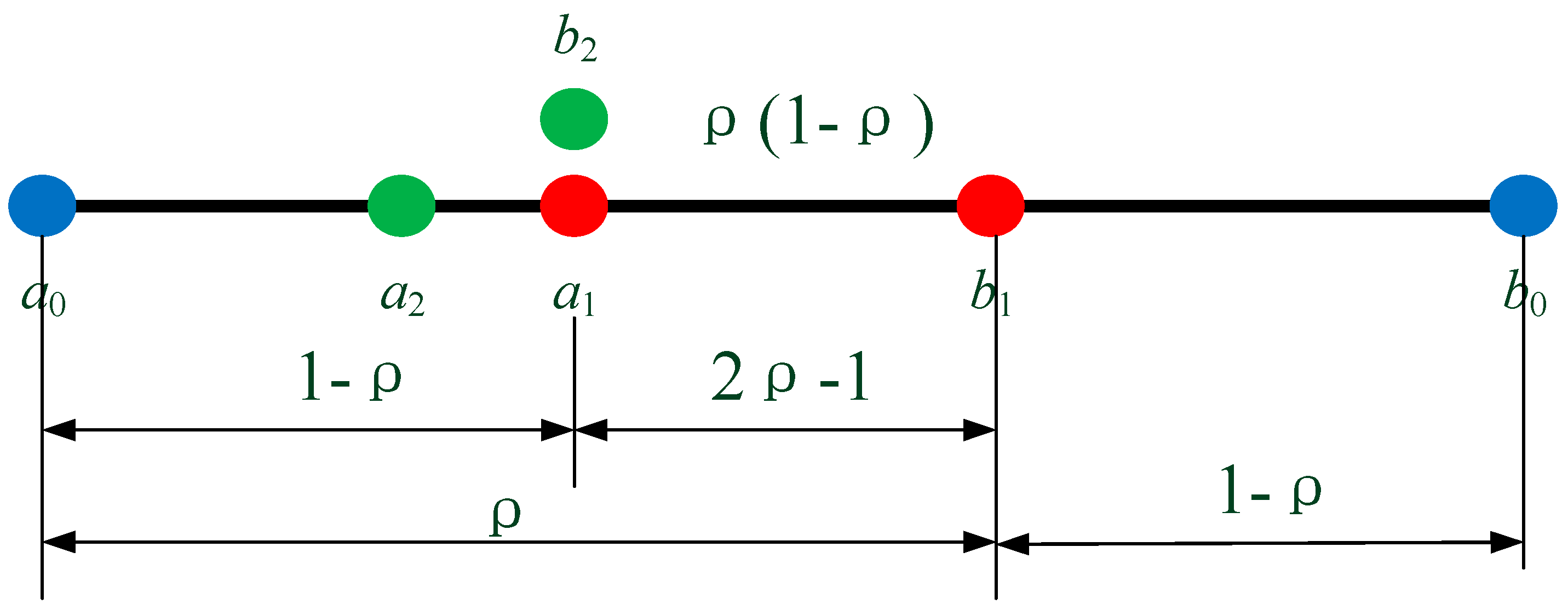
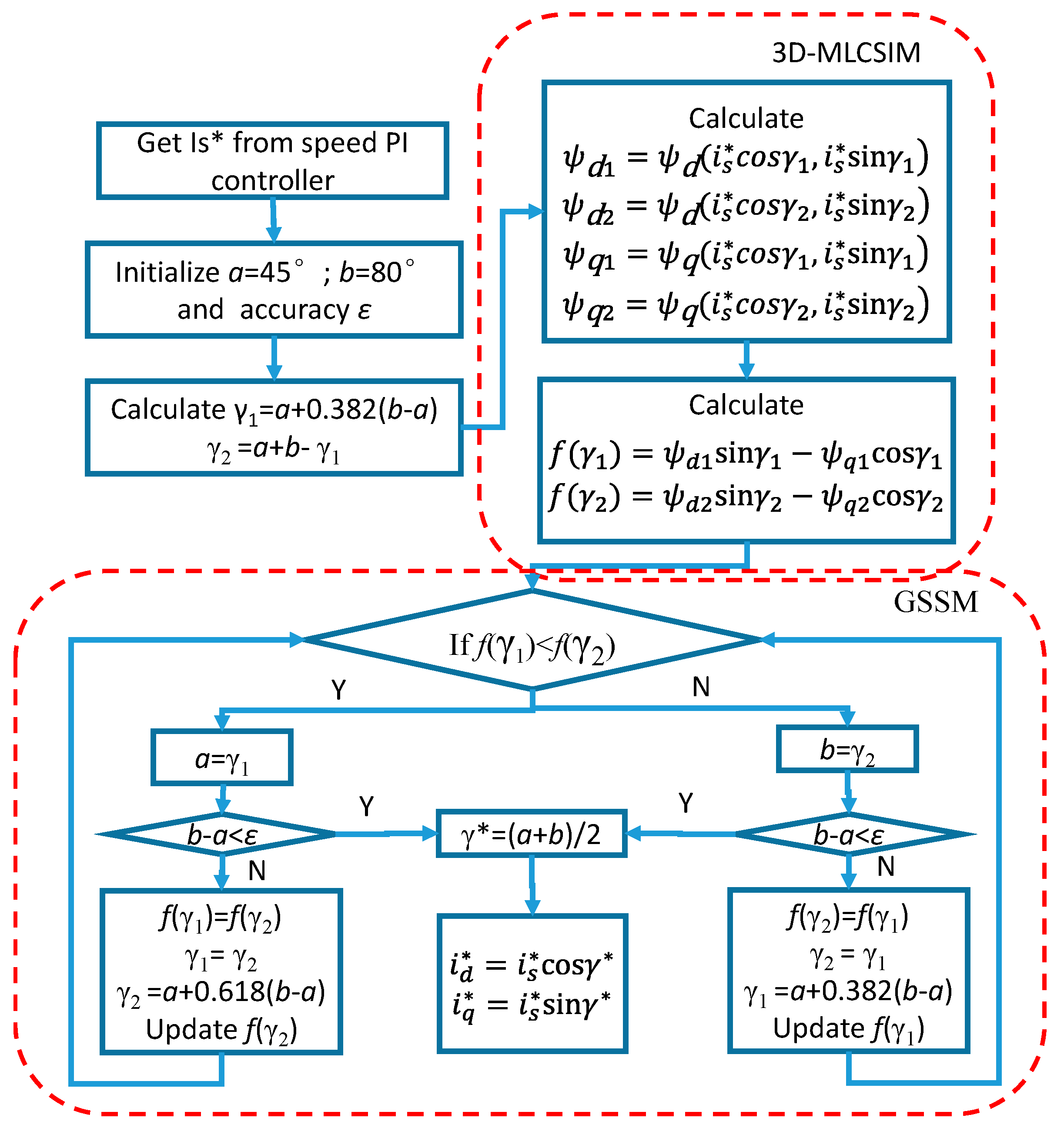
4.3. Golden Section Searching for MTPA
- If f (γ1) ≤ f (γ2), then the optimal solution (i.e., γ*) when the function takes the maximum value can only be located in the interval (γ1,b). In this case, a is denoted as γ1, and b remains unchanged. Additionally, γ1 is assigned as γ2, and new γ2 is calculated using the expression γ2 = a + 0.618(b − a). Furthermore, update f(γ2) using (15).
- If f (γ1) > f (γ2), then the optimal solution (i.e., γ*) can only be located in the interval [a,γ2). In this case, a remains unchanged, b is assigned as γ2, and γ2 is assigned as γ1. Calculate new γ1 using the formula γ1 = a + 0.382 (b − a) and update f (γ1) using (15).
- (a)
- The proposed online method does not require curve fitting. Only limited information is required, and it is easier to access these using self-identification methods.
- (b)
- Function equation f(γ) is a unimodal function, and only one maximum value is determined within the range [45° to 80°].
- (c)
- If the search error ε is set to 0.1°, then the maximum iteration can be calculated from (20) as 11. If the searching error ε is set to 0.5°, then the maximum number of iterations is 8.
- (d)
- 3D-MLCSIM can be used only once during each iteration to save the calculation.
- (e)
- The flux linkage and torque values can be calculated simultaneously for the benefit of the high-performance control method, for example, sensorless control, which relies on the parameters.
5. Experimental Results
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| ud, uq | dq-axis stator voltages |
| id, iq | dq-axis stator currents |
| Ψd, Ψq | dq-axis flux linkages |
| Ld, Lq, Ldq | dq-axis self-inductance, mutual inductance |
| ωe, Te | Electric angular frequency, Torque |
| Rs, p | the stator resistance, pole pairs |
| λ, is | Lagrange multiplier, total stator current |
| γ | Torque sweeping angle along current circle |
| γ* | Optimal MTPA angle after searching |
| ρ, ε | Interval compression ratio, searching accuracy |
| a, b | Upper and lower limit of searching intervals |
| ai, bi | The ith iteration for upper and lower limit |
| N, i | Total iterations, the ith step of the iteration |
| xi, yi | The ith known dq-axis current point in LUT |
| xp, yp | The unknown point to be interpolated |
Appendix A

References
- Odhano, S.A.; Pescetto, P.; Awan, H.A.A.; Hinkkanen, M.; Pellegrino, G.; Bojoi, R. Parameter identification and self-commissioning in AC motor drives: A technology status review. IEEE Trans. Power Electron. 2018, 34, 3603–3614. [Google Scholar] [CrossRef]
- Miao, Y.; Ge, H.; Preindl, M.; Ye, J.; Cheng, B.; Emadi, A. MTPA fitting and torque estimation technique based on a new flux-linkage model for interior-permanent-magnet synchronous machines. IEEE Trans. Ind. Appl. 2017, 53, 5451–5460. [Google Scholar] [CrossRef]
- Rabiei, A.; Thiringer, T.; Alatalo, M.; Grunditz, E.A. Improved maximum-torque-per-ampere algorithm accounting for core saturation, cross-coupling effect, and temperature for a PMSM intended for vehicular applications. IEEE Trans. Transp. Electrif. 2016, 2, 150–159. [Google Scholar] [CrossRef]
- Bedetti, N.; Calligaro, S.; Petrella, R. Stand-still self-identification of flux characteristics for synchronous reluctance machines using novel saturation approximating function and multiple linear regression. IEEE Trans. Ind. Appl. 2016, 52, 3083–3092. [Google Scholar] [CrossRef]
- Stumberger, B.; Stumberger, G.; Dolinar, D.; Hamler, A.; Trlep, M. Evaluation of saturation and cross-magnetization effects in interior permanent-magnet synchronous motor. IEEE Trans. Ind. Appl. 2003, 39, 1264–1271. [Google Scholar] [CrossRef]
- Hinkkanen, M.; Pescetto, P.; Molsa, E.; Saarakkala, S.E.; Pellegrino, G.; Bojoi, R. Sensorless self-commissioning of synchronous reluctance motors at standstill without rotor locking. IEEE Trans. Ind. Appl. 2016, 53, 2120–2129. [Google Scholar] [CrossRef]
- Varvolik, V.; Wang, S.; Prystupa, D.; Buticchi, G.; Peresada, S.; Galea, M.; Bozhko, S. Fast Experimental Magnetic Model Identification for Synchronous Reluctance Motor Drives. Energies 2022, 15, 2207. [Google Scholar] [CrossRef]
- Armando, E.; Bojoi, R.I.; Guglielmi, P.; Pellegrino, G.; Pastorelli, M. Experimental identification of the magnetic model of synchronous machines. IEEE Trans. Ind. Appl. 2013, 49, 2116–2125. [Google Scholar] [CrossRef]
- Hall, S.; Márquez-Fernández, F.J.; Alaküla, M. Dynamic magnetic model identification of permanent magnet synchronous machines. IEEE Trans. Eng. Convers. 2017, 32, 1367–1375. [Google Scholar] [CrossRef]
- Wiedemann, S.; Hall, S.; Kennel, R.M.; Alakula, M. Dynamic Testing Characterization of a Synchronous Reluctance Machine. IEEE Trans. Ind. Appl. 2017, 54, 1370–1378. [Google Scholar] [CrossRef]
- Pellegrino, G.; Boazzo, B.; Jahns, T.M. Magnetic model self-identification for PM synchronous machine drives. IEEE Trans. Ind. Appl. 2014, 51, 2246–2254. [Google Scholar] [CrossRef]
- Kim, S.; Yoon, Y.D.; Sul, S.K.; Ide, K. Maximum torque per ampere (MTPA) control of an IPM machine based on signal injection considering inductance saturation. IEEE Trans. Power Electron. 2012, 28, 488–497. [Google Scholar] [CrossRef]
- Lai, C.; Feng, G.; Tjong, J.; Kar, N.C. Direct calculation of maximum-torque-per-ampere angle for interior PMSM control using measured speed harmonic. IEEE Trans. Power Electron. 2018, 33, 9744–9752. [Google Scholar] [CrossRef]
- Bolognani, S.; Petrella, R.; Prearo, A.; Sgarbossa, L. Automatic tracking of MTPA trajectory in IPM motor drives based on AC current injection. IEEE Trans. Ind. Appl. 2010, 47, 105–114. [Google Scholar] [CrossRef]
- Liu, G.; Wang, J.; Zhao, W.; Chen, Q. A novel MTPA control strategy for IPMSM drives by space vector signal injection. IEEE Trans. Ind. Electron. 2017, 64, 9243–9252. [Google Scholar] [CrossRef]
- Sun, T.; Wang, J.; Chen, X. Maximum torque per ampere (MTPA) control for interior permanent magnet synchronous machine drives based on virtual signal injection. IEEE Trans. Power Electron. 2014, 30, 5036–5045. [Google Scholar] [CrossRef]
- Zhao, J.; Liu, W.; Tan, B. Research of maximum ratio of torque to current control method for PMSM based on least square support vector machines. In Proceedings of the 2010 International Conference on Electrical and Control Engineering, Wuhan, China, 25–27 June 2010; pp. 1623–1628. [Google Scholar]
- Lin, F.J.; Liu, Y.T.; Yu, W.A. Power perturbation based MTPA with an online tuning speed controller for an IPMSM drive system. IEEE Trans. Ind. Electron. 2017, 65, 3677–3687. [Google Scholar] [CrossRef]
- Pervin, S.; Siri, Z.; Uddin, M.N. Newton-Raphson based computation of i d in the field weakening region of IPM motor incorporating the stator resistance to improve the performance. In Proceedings of the 2012 IEEE Industry Applications Society Annual Meeting, Las Vegas, NV, USA, 7–11 October 2012; pp. 1–6. [Google Scholar]
- Wang, S.; Kang, J.; Degano, M.; Galassini, A.; Gerada, C. An Accurate Wide-speed Range Control Method of IPMSM Considering Resistive Voltage Drop and Magnetic Saturation. IEEE Trans. Ind. Electron. 2019, 67, 2630–2641. [Google Scholar] [CrossRef]
- Dianov, A.; Tinazzi, F.; Calligaro, S.; Bolognani, S. Review and classification of MTPA control algorithms for synchronous motors. IEEE Trans. Power Electron. 2021, 37, 3990–4007. [Google Scholar] [CrossRef]
- Zhou, J.; Xiao, X.; Wang, Z.; Lu, H.; Chai, J.; Zhang, M. Accurate MTPA strategy of PMSM considering cross saturation effect based on full-flux-linkage model. In Proceedings of the 2022 IEEE Energy Conversion Congress and Exposition (ECCE), Detroit, MI, USA, 9–13 October 2022; pp. 1–5. [Google Scholar]
- Mahmud, M.H.; Wu, Y.; Zhao, Y. Extremum seeking-based optimum reference flux searching for direct torque control of interior permanent magnet synchronous motors. IEEE Trans. Transp. Electrif. 2019, 6, 41–51. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Synrm Parameters | Values | Units | Parameters | Values | Units |
|---|---|---|---|---|---|
| Rated power | 15 | Kw | Shaft diameter | 60 | mm |
| Rated torque | 96 | Nm | Stack length | 205 | mm |
| Rated speed | 1500 | Rpm | slots | 48 | |
| Rated phase current | 33 | A-RMS | poles | 4 | |
| Rated phase voltage | 210 | V-RMS | Tooth width | 5 | mm |
| Stator outer diameter | 260 | mm | Slot height | 20.3 | mm |
| Rotor outer diameter | 169 | mm | Air gap | 0.5 | mm |
| i | a | b | γ1 | γ2 | f(γ1) | f(γ2) | γ2 − γ1 |
|---|---|---|---|---|---|---|---|
| 1 | 45.00 | 80.00 | 58.37 | 66.63 | 0.6343 | 0.5709 | 8.26 |
| 2 | 45.00 | 66.63 | 53.26 | 58.37 | 0.6390 | 0.6343 | 5.11 |
| 3 | 45.00 | 58.37 | 50.11 | 53.26 | 0.6300 | 0.6390 | 3.16 |
| 4 | 50.11 | 58.37 | 53.26 | 55.21 | 0.6390 | 0.6401 | 1.95 |
| 5 | 53.26 | 58.37 | 55.21 | 56.42 | 0.6401 | 0.6389 | 1.21 |
| 6 | 53.26 | 56.42 | 54.47 | 55.21 | 0.6399 | 0.6401 | 0.75 |
| 7 | 54.47 | 56.42 | 55.21 | 55.67 | 0.6401 | 0.6399 | 0.46 |
| 8 | 54.47 | 55.67 | 54.93 | 55.21 | 0.6401 | 0.6401 | 0.28 |
| 9 | 54.93 | 55.67 | 55.21 | 55.39 | 0.6401 | 0.6401 | 0.18 |
| 10 | 55.21 | 55.67 | 55.39 | 55.50 | 0.6401 | 0.6401 | 0.11 |
| 11 | 55.21 | 55.50 | 55.32 | 55.39 | 0.6401 | 0.6401 | 0.07 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, S.; Varvolik, V.; Bao, Y.; Aboelhassan, A.; Degano, M.; Buticchi, G.; Zhang, H. Automated Maximum Torque per Ampere Identification for Synchronous Reluctance Machines with Limited Flux Linkage Information. Machines 2024, 12, 96. https://doi.org/10.3390/machines12020096
Wang S, Varvolik V, Bao Y, Aboelhassan A, Degano M, Buticchi G, Zhang H. Automated Maximum Torque per Ampere Identification for Synchronous Reluctance Machines with Limited Flux Linkage Information. Machines. 2024; 12(2):96. https://doi.org/10.3390/machines12020096
Chicago/Turabian StyleWang, Shuo, Vasyl Varvolik, Yuli Bao, Ahmed Aboelhassan, Michele Degano, Giampaolo Buticchi, and He Zhang. 2024. "Automated Maximum Torque per Ampere Identification for Synchronous Reluctance Machines with Limited Flux Linkage Information" Machines 12, no. 2: 96. https://doi.org/10.3390/machines12020096
APA StyleWang, S., Varvolik, V., Bao, Y., Aboelhassan, A., Degano, M., Buticchi, G., & Zhang, H. (2024). Automated Maximum Torque per Ampere Identification for Synchronous Reluctance Machines with Limited Flux Linkage Information. Machines, 12(2), 96. https://doi.org/10.3390/machines12020096