
Modeling and Verification of Cable-Hole Transmission Tension Ratio Considering the Cable Lateral Extrusion


Abstract
1. Introduction
2. Mechanical Model of Cable-Hole Contact Surface
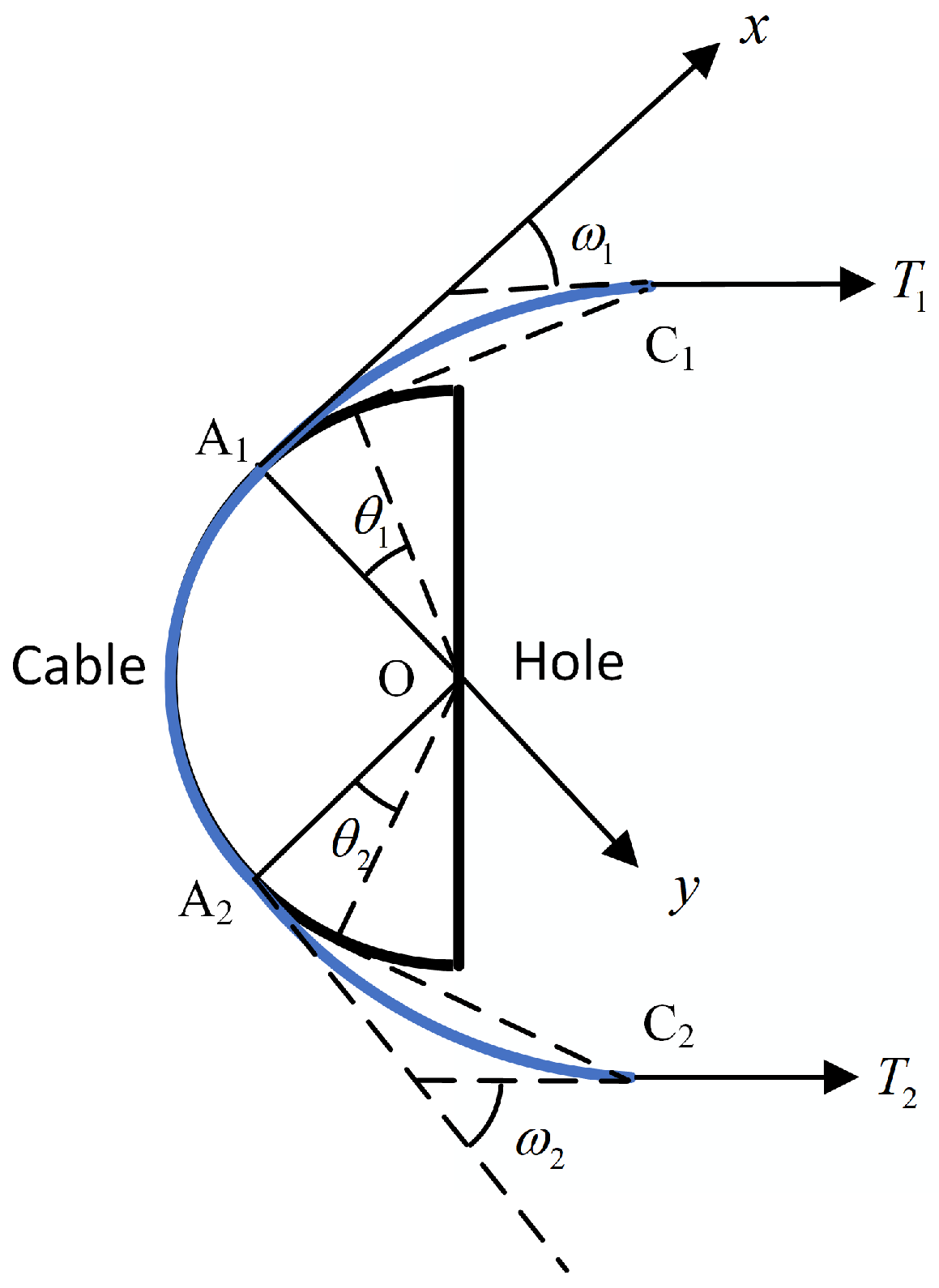
2.1. Cable-Hole Contact Surface
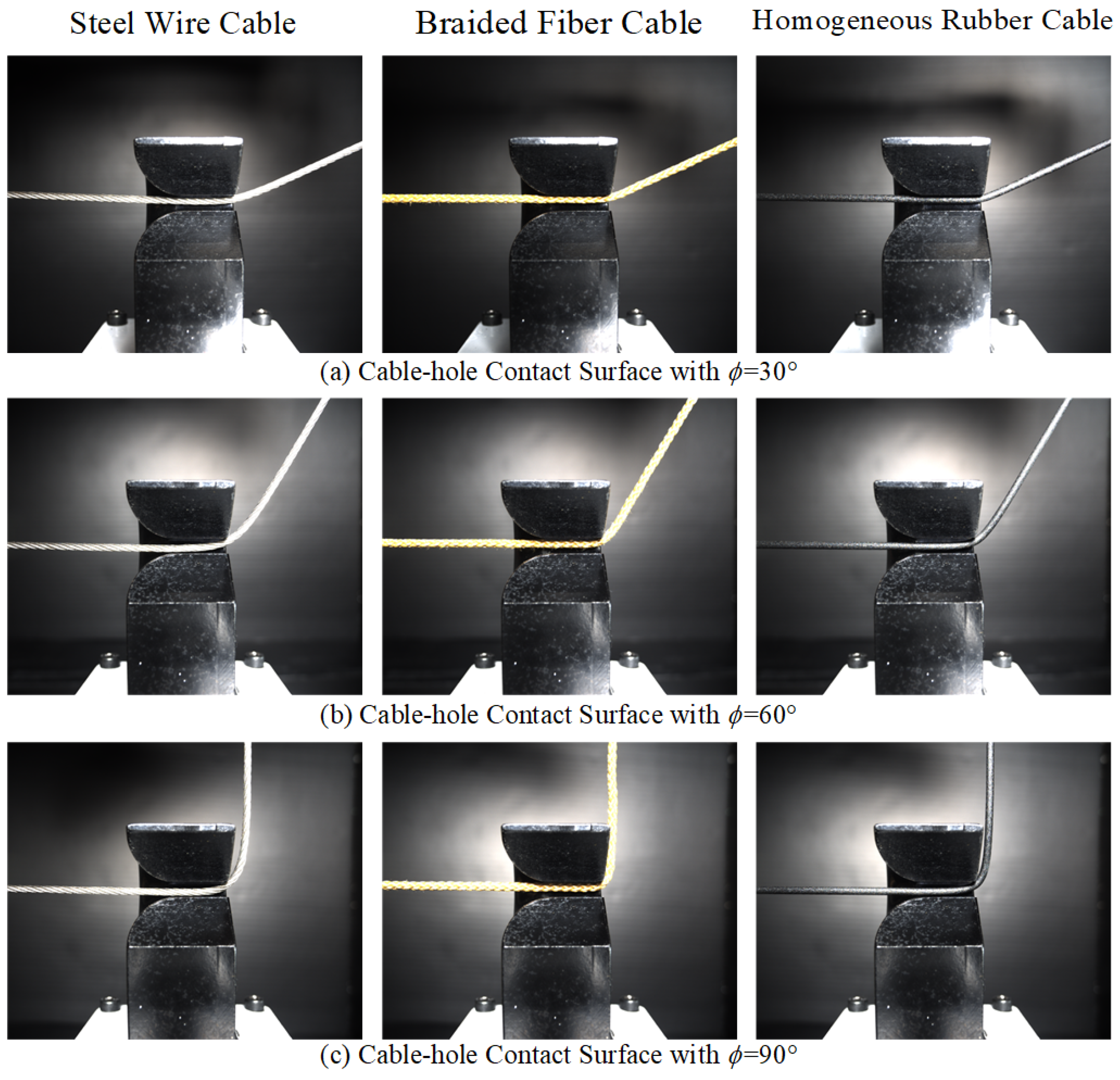
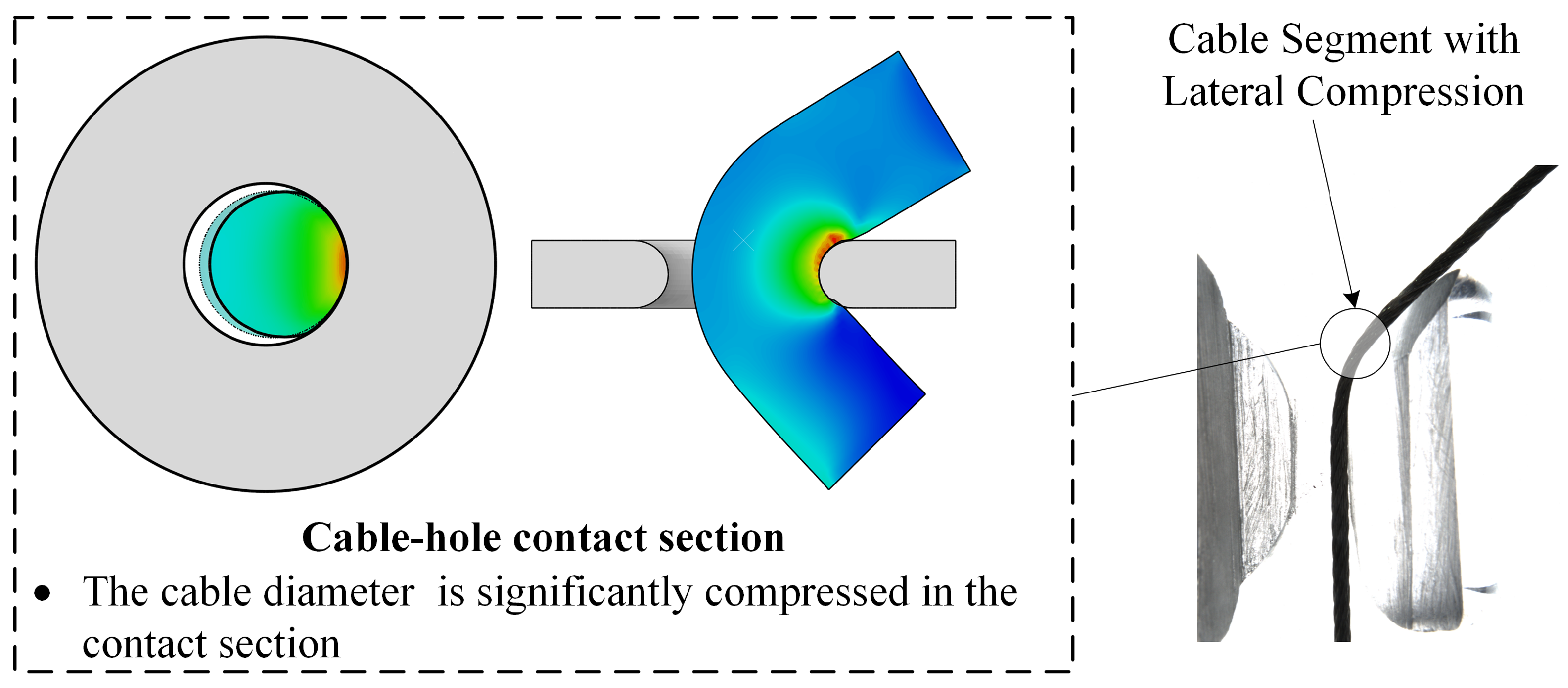
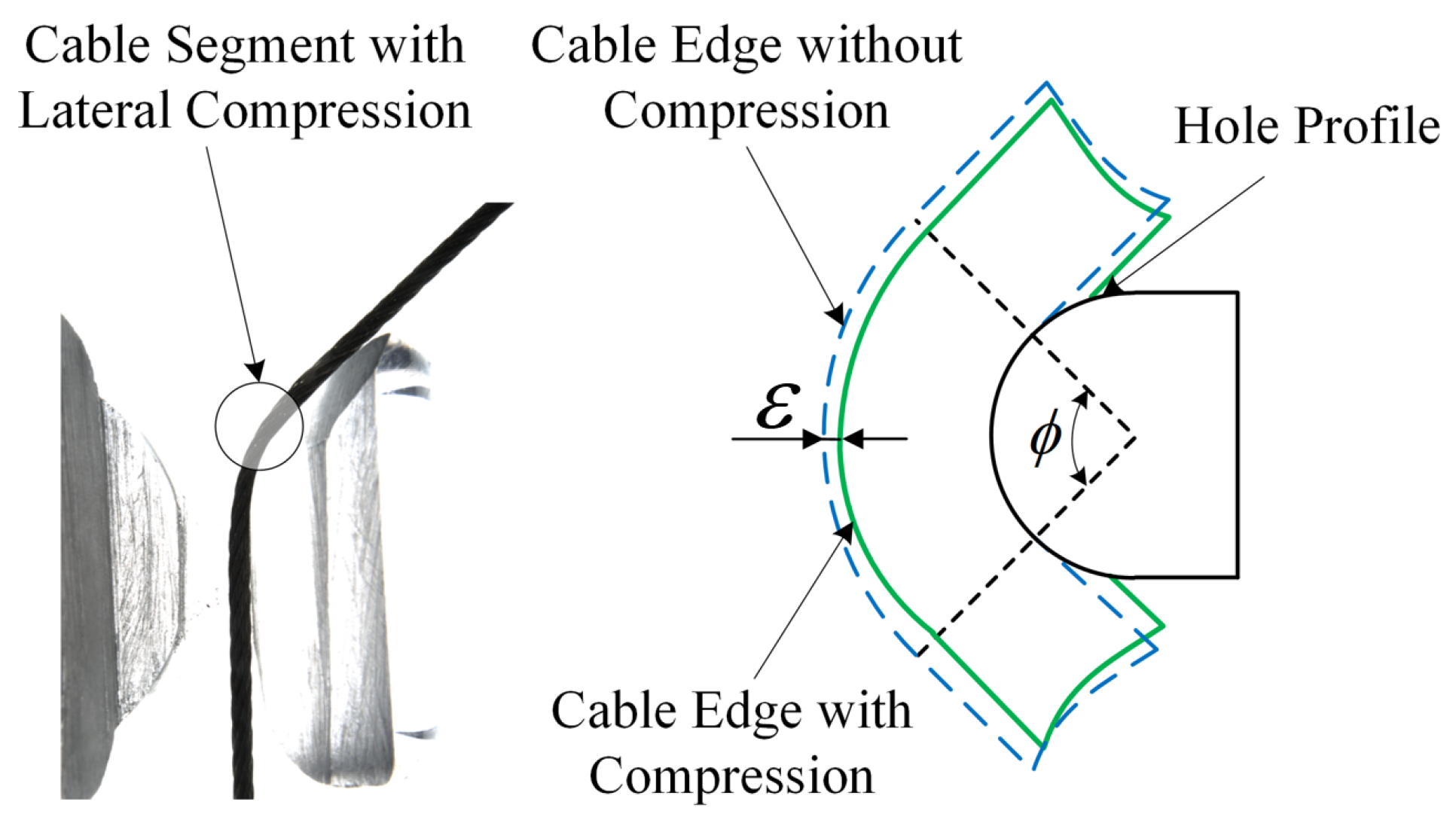
2.2. Compression Effect of Cable through Hole
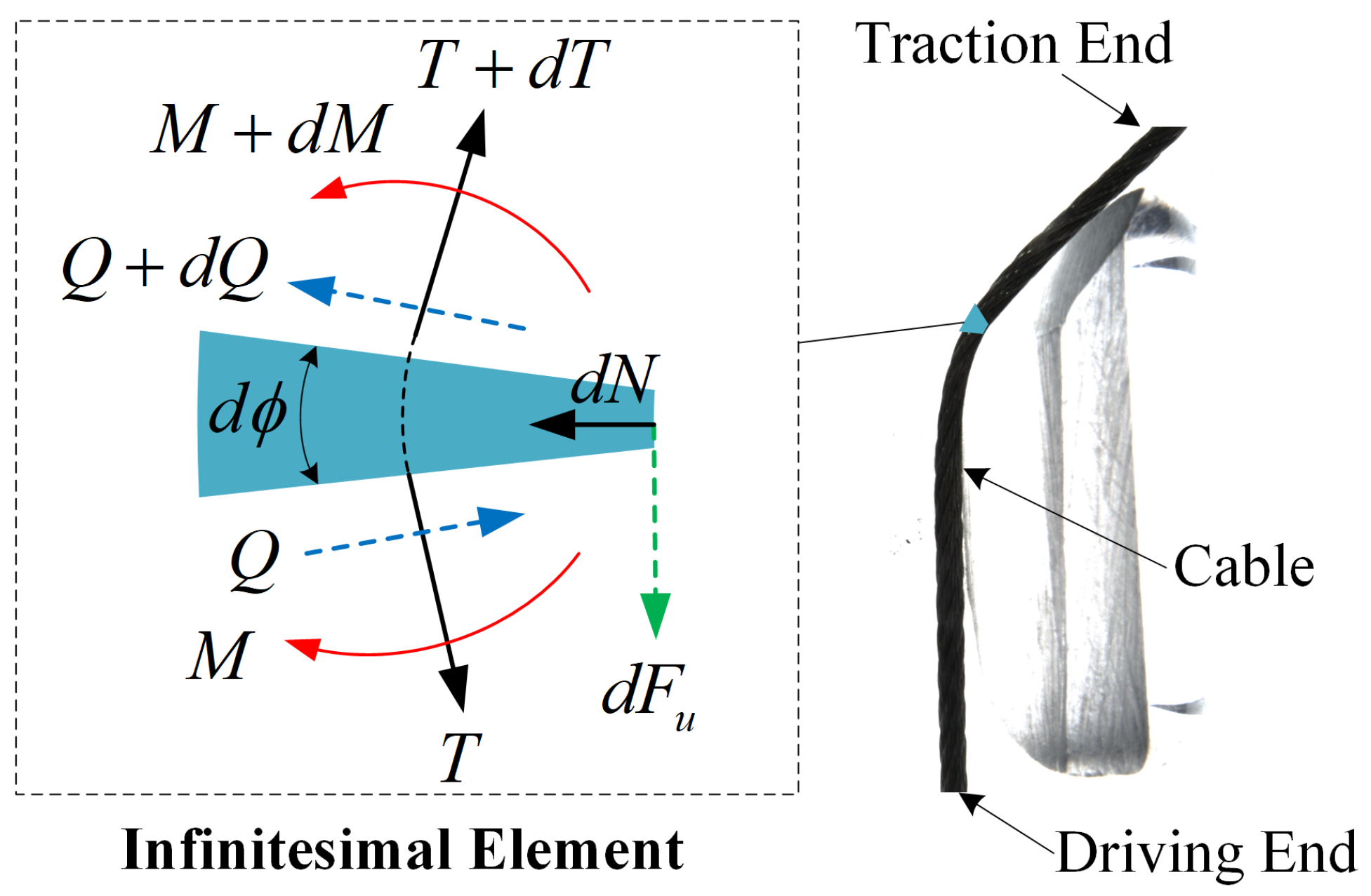
2.3. Differential Equation of Cable Tension Threading through Hole
3. Tension Ratio Model of Cable-Hole Transmission Based on Perturbation Method
3.1. Perturbation Model
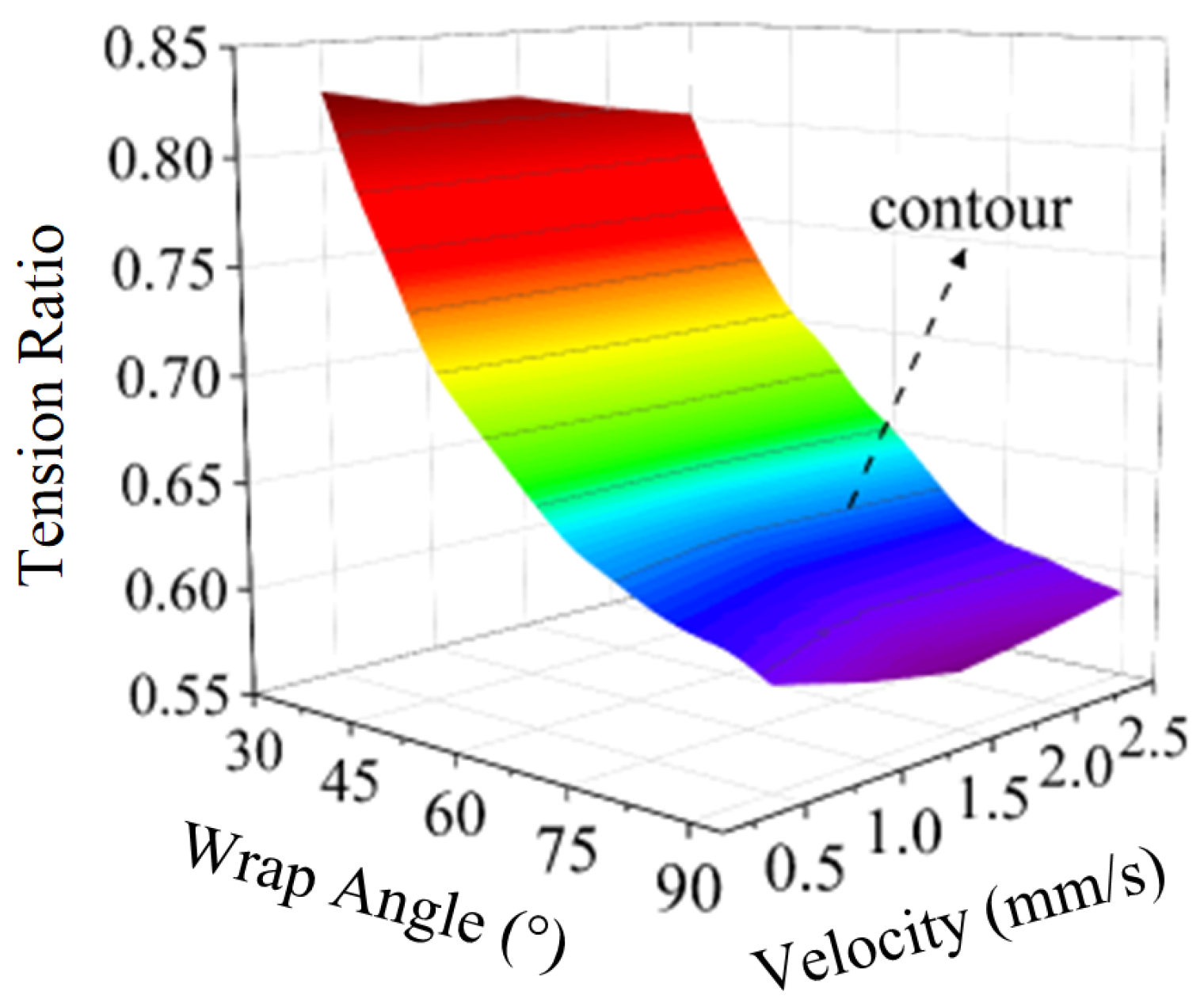
3.2. Tension Ratio of Cable Threading through Holes
4. Tension Control of the Cable-Drive End
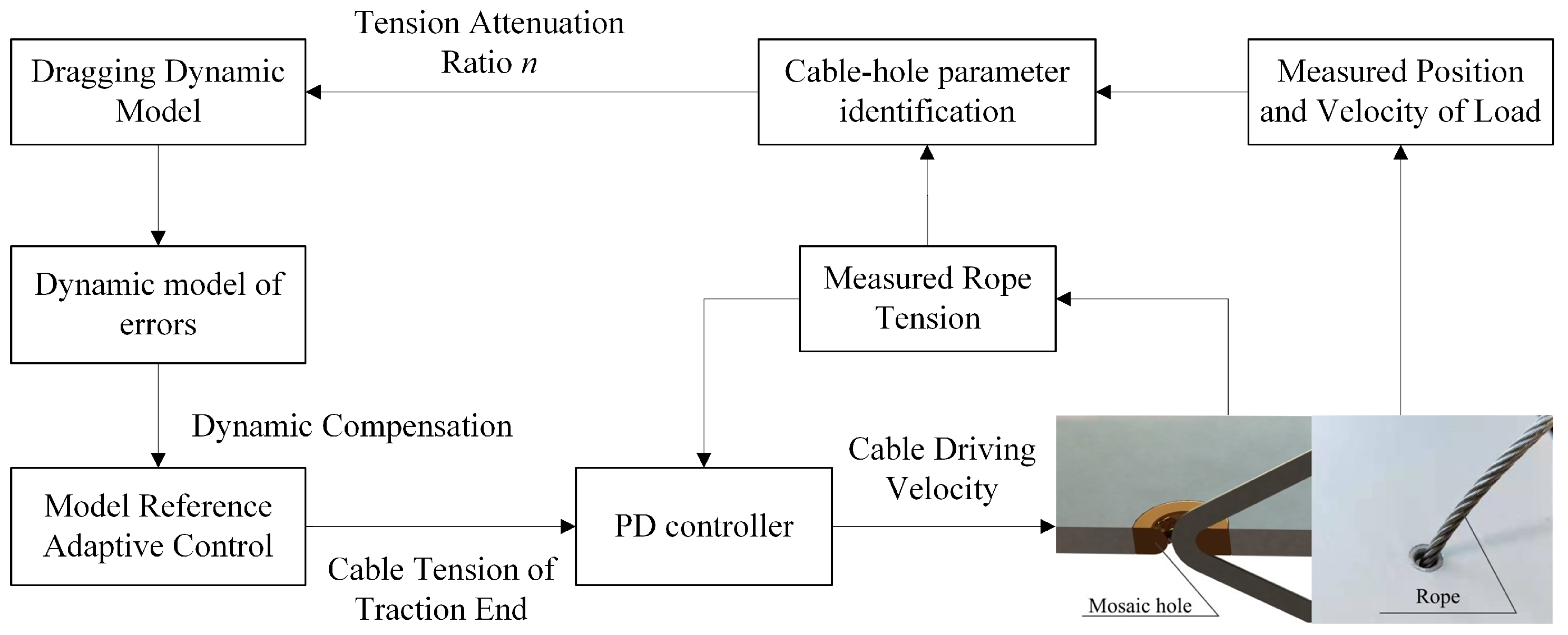
4.1. Control Frame for the Cable-Drive End Tension
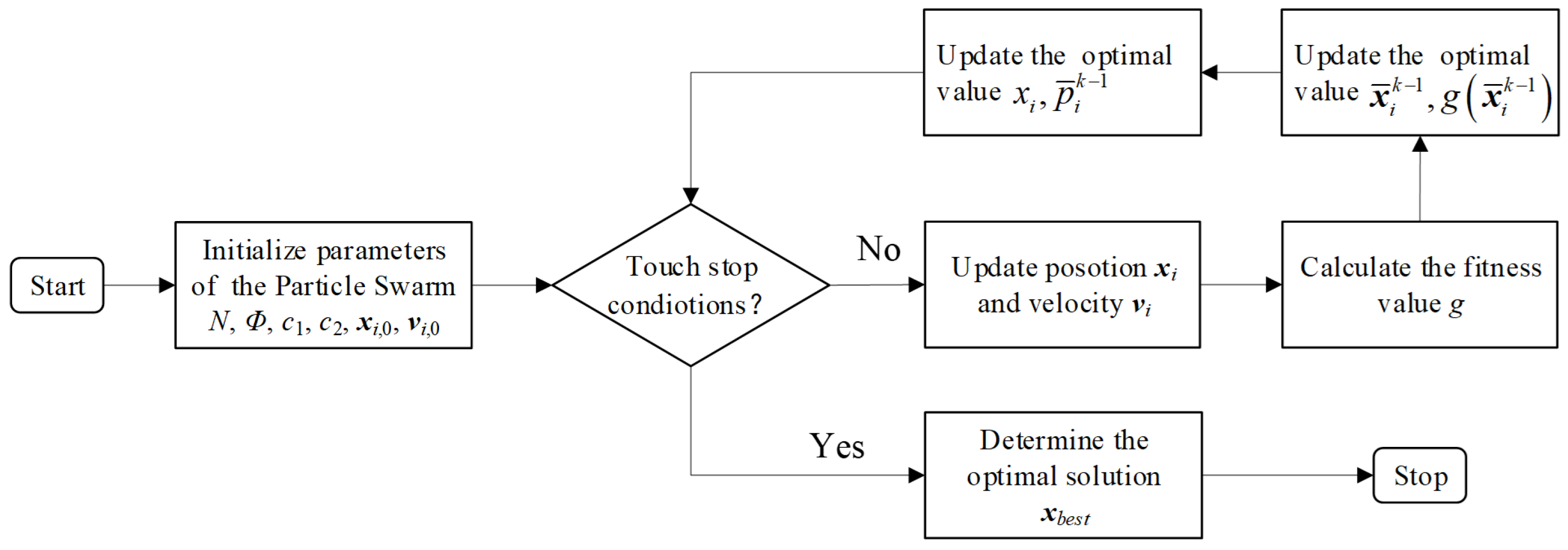
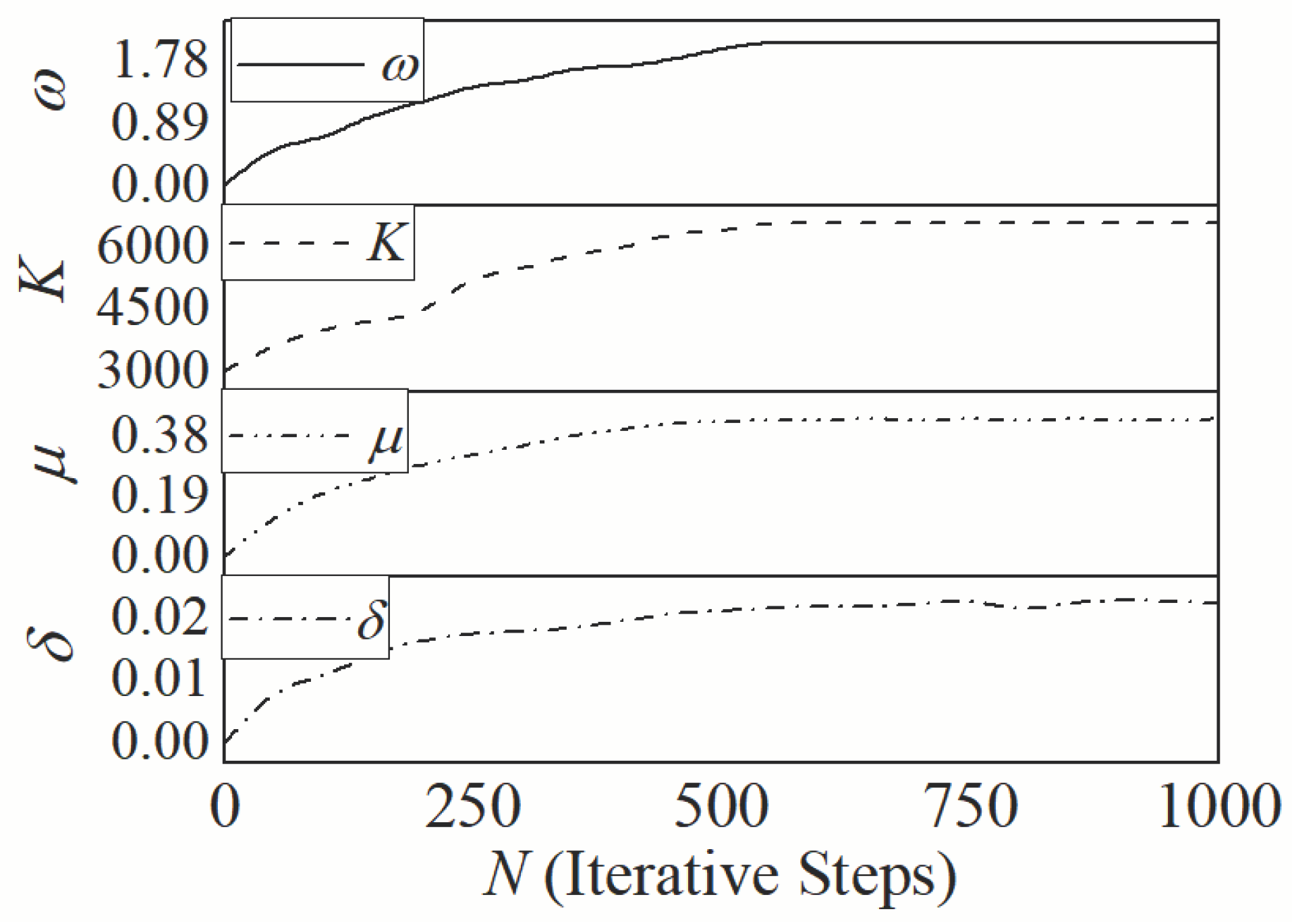
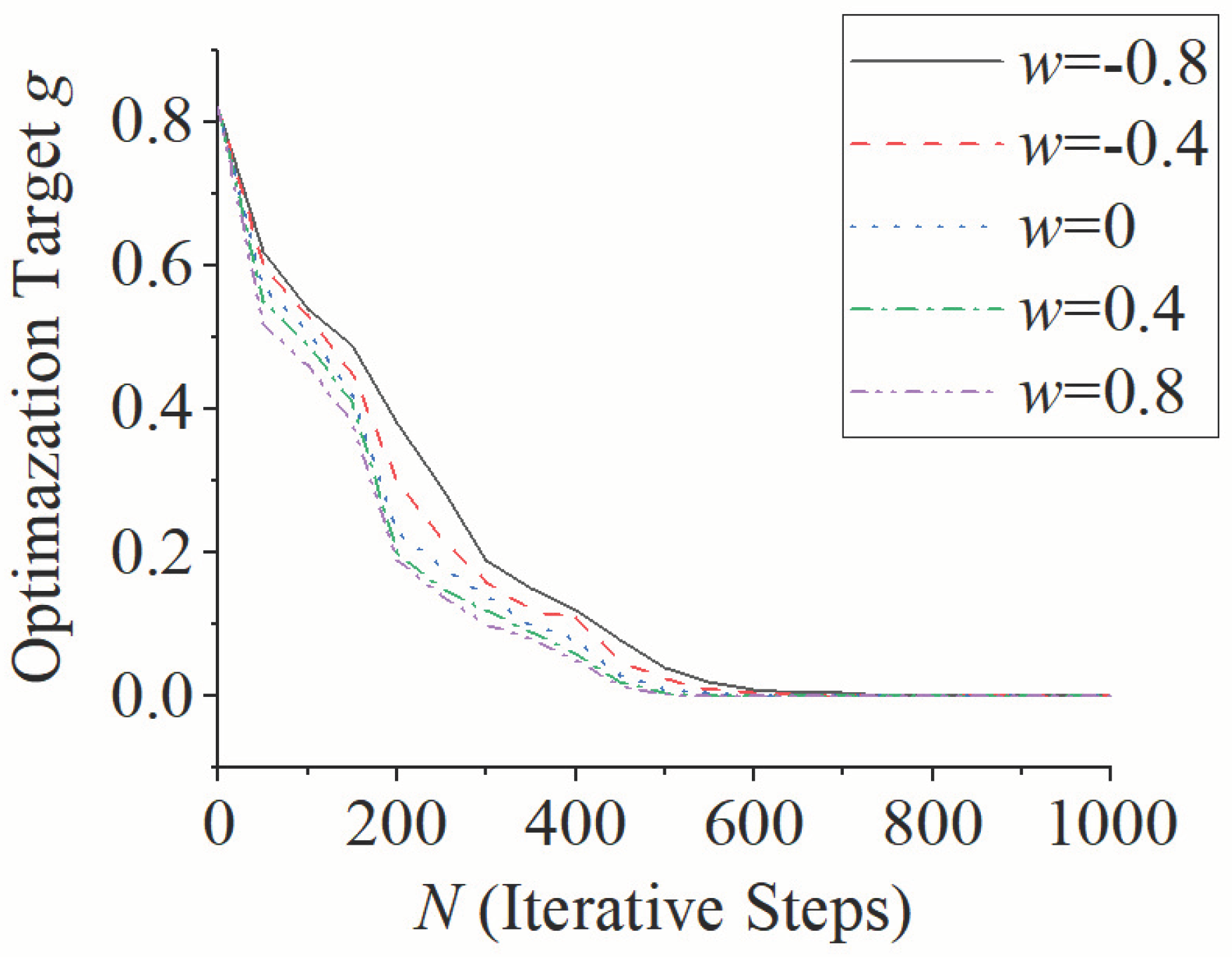
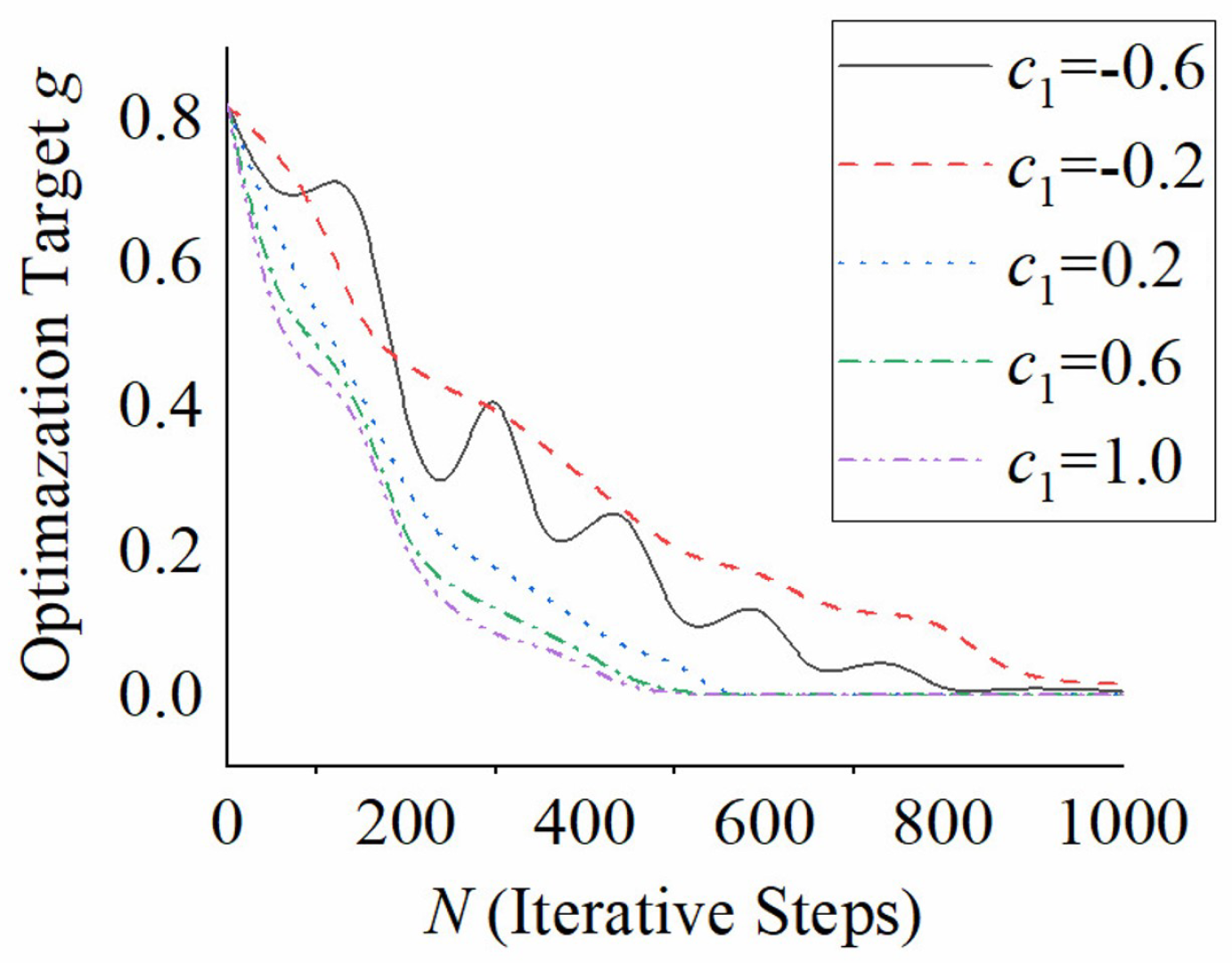
4.2. Cable-Hole Parameter Identification Based on the PSO Algorithm
4.3. Adaptive Control Based on the Compensation of Cable-Drive Tension
5. Experiment
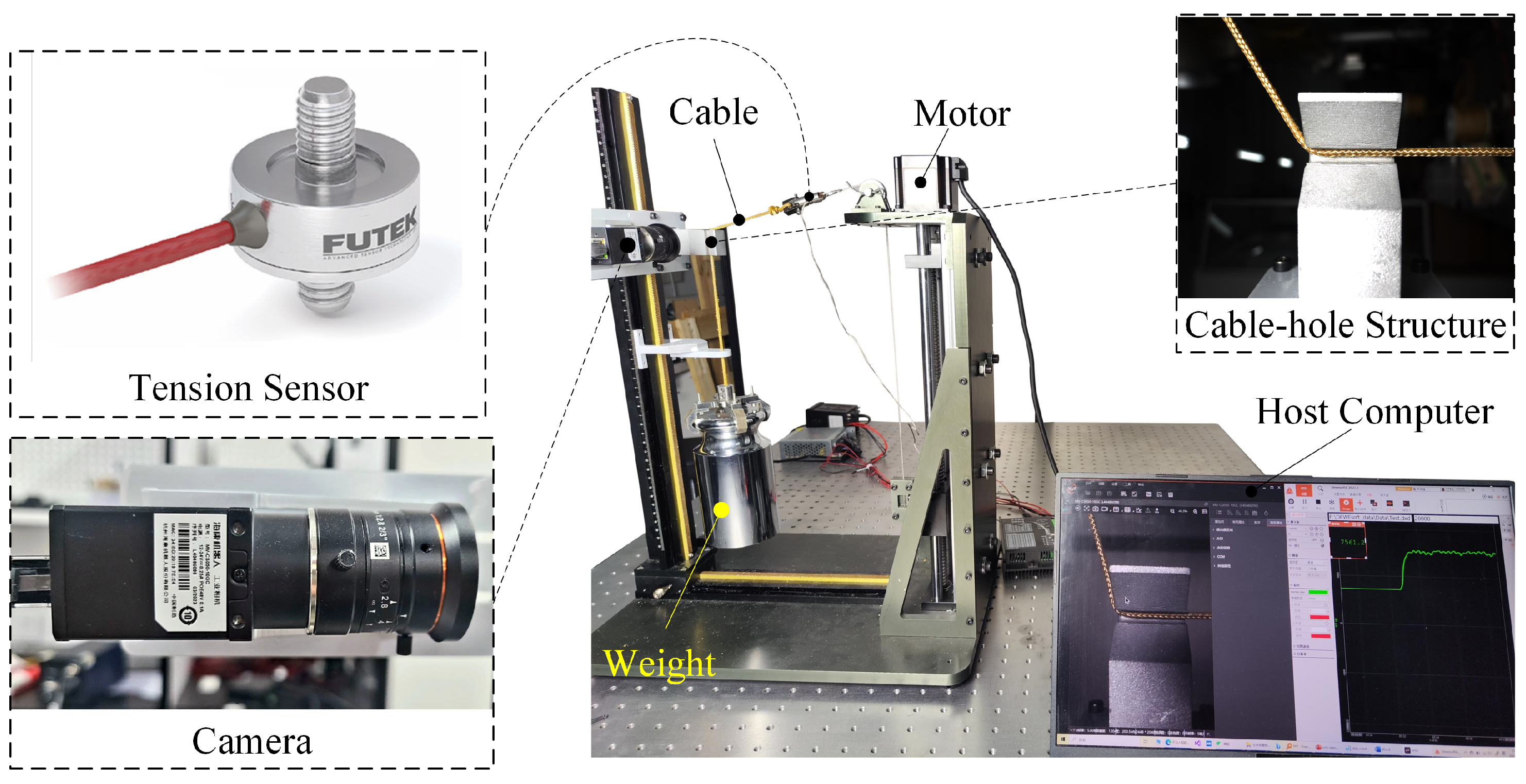
5.1. Experimental Prototype
5.2. Identification of Cable-Hole Parameters
5.3. Cable Traction Control
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| DEM | Differential Equation Model |
| CTSB | Curve-to-Solid Beam |
| FEM | finite element model |
| PSO | Particle Swarm Optimization |
Appendix A
Appendix A.1. The Derivation Process of the Cable-Hole Wrap Angle
Appendix A.2. The Derivation Process of the Cable Through-Hole Tension Ratio
Appendix A.3. Detailed Experimental Data

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Cable Type | Diameter (mm) | Compression (mm) | Identified Cable-Hole Parameters (Unit System: International Units) | Steady-State Tracking Error (mm) | |||||
|---|---|---|---|---|---|---|---|---|---|
| 30° | 60° | 90° | K | ||||||
| Steel Wire Cable | 1 | 0.172 | 0.191 | 0.232 | 0.019 | 0.283 | 1192 | 3.53 | 0.00–0.06 |
| 2 | 0.364 | 0.396 | 0.416 | 0.015 | 0.274 | 2643 | 3.48 | 0.00–0.06 | |
| 3 | 0.371 | 0.402 | 0.433 | 0.009 | 0.297 | 3347 | 3.44 | 0.00–0.07 | |
| Braided Fiber Cable | 1 | 0.211 | 0.312 | 0.340 | 0.028 | 0.425 | 3027 | 2.02 | 0.00–0.10 |
| 2 | 0.365 | 0.485 | 0.561 | 0.020 | 0.430 | 6574 | 2.03 | 0.00–0.10 | |
| 3 | 0.397 | 0.66 | 0.967 | 0.015 | 0.427 | 9982 | 1.99 | 0.00–0.09 | |
| Homogeneous Rubber Cable | 1 | 0.307 | 0.391 | 0.488 | 0.042 | 0.328 | 1918 | 1.67 | 0.00–0.23 |
| 2 | 0.364 | 0.536 | 0.646 | 0.033 | 0.334 | 4622 | 1.66 | 0.00–0.22 | |
| 3 | 0.468 | 0.924 | 1.382 | 0.027 | 0.320 | 6913 | 1.71 | 0.00–0.22 | |
References
- Seo, M.; Yoo, S.; Choi, M.; Oh, J.; Kim, H.S.; Seo, T. Vibration Reduction of Flexible Rope-Driven Mobile Robot for Safe Facade Operation. IEEE-ASME Trans. Mechatron. 2021, 26, 1812–1819. [Google Scholar] [CrossRef]
- Sun, H.; Tang, X.; Cui, Z.; Hou, S. Dynamic Response of Spatial Flexible Structures Subjected to Controllable Force Based on Cable-Driven Parallel Robots. IEEE-ASME Trans. Mechatron. 2020, 25, 2801–2811. [Google Scholar] [CrossRef]
- Xing, K.; Wang, Y.; Chen, D.; Wang, M.; Lu, S. Flexible Ankle-Assisted Robot Technology Based on Rope Drive. In Proceedings of the 2020 IEEE International Conference on Real-Time Computing and Robotics (IEEE-RCAR 2020), Asahikawa, Japan, 28–29 September 2020; pp. 464–468. [Google Scholar] [CrossRef]
- Hua, C.; Tian, Y.; Dai, X.; Peng, G. Study on Terminal Flexibility Control Strategy for the Rope Driven Serpentine Robotic Arm. In Proceedings of the 2023 IEEE International Conference on Mechatronics and Automation (ICMA), Harbin, China, 6–9 August 2023; pp. 871–876. [Google Scholar] [CrossRef]
- Bruski, D. Determination of the Bending Properties of Wire Rope Used in Cable Barrier Systems. Materials 2020, 13, 3842. [Google Scholar] [CrossRef] [PubMed]
- Miyasaka, M.; Haghighipanah, M.; Li, Y.; Matheson, J.; Lewis, A.; Hannaford, B. Modeling cable-driven robot with hysteresis and cable-pulley network friction. IEEE-ASME Trans. Mechatron. 2020, 25, 1095–1104. [Google Scholar] [CrossRef]
- Zheng, X.; Yang, T.; Zhu, X.; Chen, Z.; Wang, X.; Liang, B. Dynamic modeling and experimental verification of a cable-driven continuum manipulator with cable-constrained synchronous rotating mechanisms. Nonlinear Dyn. 2022, 107, 153–172. [Google Scholar] [CrossRef]
- Li, Y.; Liu, Y.; Meng, D.; Wang, X.; Liang, B. Modeling and experimental verification of a cable-constrained synchronous rotating mechanism considering friction effect. Robot. Autom. Lett. 2020, 5, 5464–5471. [Google Scholar] [CrossRef]
- Zhou, Z.; Zheng, X.; Chen, Z.; Wang, X.; Liang, B.; Wang, Q. Dynamics modeling and analysis of cable-driven segmented manipulator considering friction effects. Mech. Mach. Theory 2022, 169, 104633. [Google Scholar] [CrossRef]
- Liang, Z.; Jiang, B.; Quan, P.; Lin, H.; Lou, Y.; Di, S. Force-closure analysis of multilink cable-driven redundant manipulators considering cable coupling and friction effects. IEEE-ASME Trans. Mechatron 2023, 1–12. [Google Scholar] [CrossRef]
- Dezman, M.; Asfour, T.; Ude, A.; Gams, A. Mechanical design and friction modelling of a cable-driven upper-limb exoskeleton. Mech. Mach. Theory 2022, 171, 104746. [Google Scholar] [CrossRef]
- Jung, J.H.; Pan, N.; Kang, T.J. Generalized capstan problem: Bending rigidity, nonlinear friction, and extensibility effect. Tribol. Int. 2008, 41, 524–534. [Google Scholar] [CrossRef]
- Lu, Y.-f.; Fan, D.-P.; Liu, H.; Hei, M. Transmission capability of precise cable drive including bending rigidity. Mech. Mach. Theory 2015, 94, 132–140. [Google Scholar] [CrossRef]
- Gao, X.; Wang, L.; Hao, X. An improved Capstan equation including power-law friction and bending rigidity for high performance yarn. Mech. Mach. Theory 2015, 90, 84–94. [Google Scholar] [CrossRef]
- Guo, S.; Wang, G.; Qi, Z.; Zhuo, Y.; Wu, Z. A quasi-static model for kinematic analysis of a feed driving mechanism. Mech. Mach. Theory 2020, 148, 103780. [Google Scholar] [CrossRef]
- Guo, Y.; Zhang, D.; Zhang, X.; Wang, D.; Wang, S. A New Transmission Theory of “Global Dynamic Wrap Angle” for Friction Hoist Combining Suspended and Wrapped Wire Rope. Appl. Sci. 2020, 10, 1305. [Google Scholar] [CrossRef]
- Peng, Y.; Wei, Y.; Zhou, M. Efficient modeling of cable-pulley system with friction based on arbitrary-Lagrangian-Eulerian approach. Appl. Math. Mech. 2017, 38, 1785–1802. [Google Scholar] [CrossRef]
- Greenway, M.E.; Grobler, S.R.; Bilessuris, S. Analysis of rope load sharing on multi-rope friction winders. J. South. Afr. Inst. Min. Metall. 2021, 121, 513–522. [Google Scholar] [CrossRef]
- Tang, S.; Huang, R.; Zhao, G. Mechanical characteristics and experimental research of a flexible rope-sheave hoisting mechanism. J. Mech. Sci. Technol. 2022, 36, 3329–3339. [Google Scholar] [CrossRef]
- Escalona, J.L. An analytical solution of the rope-sheave contact in static conditions based on a bristle model. Mech. Mach. Theory 2023, 185, 105334. [Google Scholar] [CrossRef]
- Konyukhov, A.; Shala, S. New benchmark problems for verification of the curve-to-surface contact algorithm based on the generalized Euler-Eytelwein problem. Int. J. Numer. Methods Eng. 2022, 123, 411–443. [Google Scholar] [CrossRef]
- Zheng, X.; Yang, T.; Chen, Z.; Wang, X.; Liang, B.; Liao, Q. ALE formulation for dynamic modeling and simulation of cable-driven mechanisms frictions. Mech. Syst. Signal Process. 2022, 168, 108633. [Google Scholar] [CrossRef]
- Chen, Y.; Hu, H.; Tan, H.; Xu, J.; He, Y.; Zhou, J. Effects of tribological and material properties of wire rope on the motion synchronization of a precision flexible transmission device. Structures 2024, 63, 106287. [Google Scholar] [CrossRef]
- Wang, J.; Qi, Z.; Wang, G. Hybrid modeling for dynamic analysis of cable-pulley systems with time-varying length cable and its application. J. Sound Vib. 2017, 406, 277–294. [Google Scholar] [CrossRef]
- Li, Z.; Zhao, Z.; Zhang, H.; Wang, Q. Variable boundary contact problem between pulley and flexible rope. Int. J. Non-Linear Mech. 2023, 152, 104399. [Google Scholar] [CrossRef]
- Westin, C.; Irani, R.A. Modeling dynamic cable-sheave contact and detachment during towing operations. Mar. Struct. 2021, 77, 102960. [Google Scholar] [CrossRef]
- Escalona, J.L. Rope-sheave contact transient analysis in hoisting operations with a bristle model and an arbitrary Lagrangian-Eulerian approach. Multibody Syst. Dyn. 2024. [Google Scholar] [CrossRef]
- Han, Y.; Ma, X.; Zhang, G.; Hu, S.; Shi, X. Numerical investigation of rope-core elasticity effects on rope-sheave traction. J. Braz. Soc. Mech. Sci. Eng. 2024, 46, 90. [Google Scholar] [CrossRef]
- Chen, C.; Guo, Y.; Ma, W. Fast Solution of Pressure and Stress of Dry Contact Using Multigrid Techniques. Processes 2022, 10, 1441. [Google Scholar] [CrossRef]
- Lee, H.-W.; Roh, M.-I.; Ham, S.-H. Block erection simulation considering frictional contact with wire ropes. Ocean. Eng. 2020, 217, 107904. [Google Scholar] [CrossRef]
- Mao, S.; Tao, J.; Xie, J.; Xu, S.; Chen, L.; Yu, H.; Liu, C. A data-driven approach for modifying the rope dynamics model of the flexible hoisting system. J. Low Freq. Noise Vib. Act. Control 2023, 42, 1055–1070. [Google Scholar] [CrossRef]
- Maleki, M.; Ahmadian, H.; Rajabi, M. A modified Bouc-Wen model to simulate asymmetric hysteresis loop and stochastic model updating in frictional contacts. Int. J. Solids Struct. 2023, 269, 112212. [Google Scholar] [CrossRef]
- Marques, F.G.; Garcia, C. Stribeck Parameters Estimation of a Diaphragm Valve Using Quasi Newton Method. IFAC PapersOnLine 2019, 52, 225–230. [Google Scholar] [CrossRef]
- Yan, Y.; Xu, J.; Wiercigroch, M. Modelling of regenerative and frictional cutting dynamics. International J. Mech. Sci. 2019, 156, 86–93. [Google Scholar] [CrossRef]
- Bazrafshan, M.; de Rooij, M.B.; Schipper, D.J. The effect of adhesion and roughness on friction hysteresis loops. Int. J. Mech. Sci. 2019, 155, 9–18. [Google Scholar] [CrossRef]
- Gopal, A.; Sultani, M.M.; Bansal, J.C. On stability analysis of particle swarm optimization algorithm. Arab. J. Sci. Eng. 2020, 45, 2385–2394. [Google Scholar] [CrossRef]








| Parameter | w | |||
|---|---|---|---|---|
| Value | 1000 | 0.4 | 0.6 | 0.8 |
| Parameter | K | |||
|---|---|---|---|---|
| Value | 0.02 | 0.43 | 6574 | 2.03 |
| Parameter | ||||||||
|---|---|---|---|---|---|---|---|---|
| Value | 1 | 2 | 0.5 | 0.1 | 0.005 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gu, H.; Deng, Z.; Yu, Y.; Li, X.; Ai, B. Modeling and Verification of Cable-Hole Transmission Tension Ratio Considering the Cable Lateral Extrusion. Machines 2024, 12, 707. https://doi.org/10.3390/machines12100707
Gu H, Deng Z, Yu Y, Li X, Ai B. Modeling and Verification of Cable-Hole Transmission Tension Ratio Considering the Cable Lateral Extrusion. Machines. 2024; 12(10):707. https://doi.org/10.3390/machines12100707
Chicago/Turabian StyleGu, Haiyu, Zhiming Deng, Yunfeng Yu, Xiaofeng Li, and Baixin Ai. 2024. "Modeling and Verification of Cable-Hole Transmission Tension Ratio Considering the Cable Lateral Extrusion" Machines 12, no. 10: 707. https://doi.org/10.3390/machines12100707
APA StyleGu, H., Deng, Z., Yu, Y., Li, X., & Ai, B. (2024). Modeling and Verification of Cable-Hole Transmission Tension Ratio Considering the Cable Lateral Extrusion. Machines, 12(10), 707. https://doi.org/10.3390/machines12100707