
Urban Platooning Combined with Dynamic Traffic Lights



Abstract
:1. Introduction
- Compared with the state of the art in traffic light control methods, a PID (Proportional–Integral–Derivative) controller-based platooning model was applied combined with traffic light system (TLS) control.
- The proposed TLS logic is not limited to keeping the same Signal Phase and Timing (SPaT) [12] cycle order as in previous solutions. Calculations give the needed time for the current active lane with the actual vehicle, which is managed to initiate vehicle-to-infrastructure (V2I) communication, and the TLS will trace that vehicle until it successfully passes through the intersection (before it is allowed to open the TLS controlling communication again).
- The proposed dynamic algorithm focuses on the approaching vehicles sending signals to the traffic light (via V2I communication). Priority calculation is based on the speed and location of vehicles, i.e., faster vehicles can cross the intersection more efficiently.
2. The State of the Art of Platooning Operation and Smart Intersections
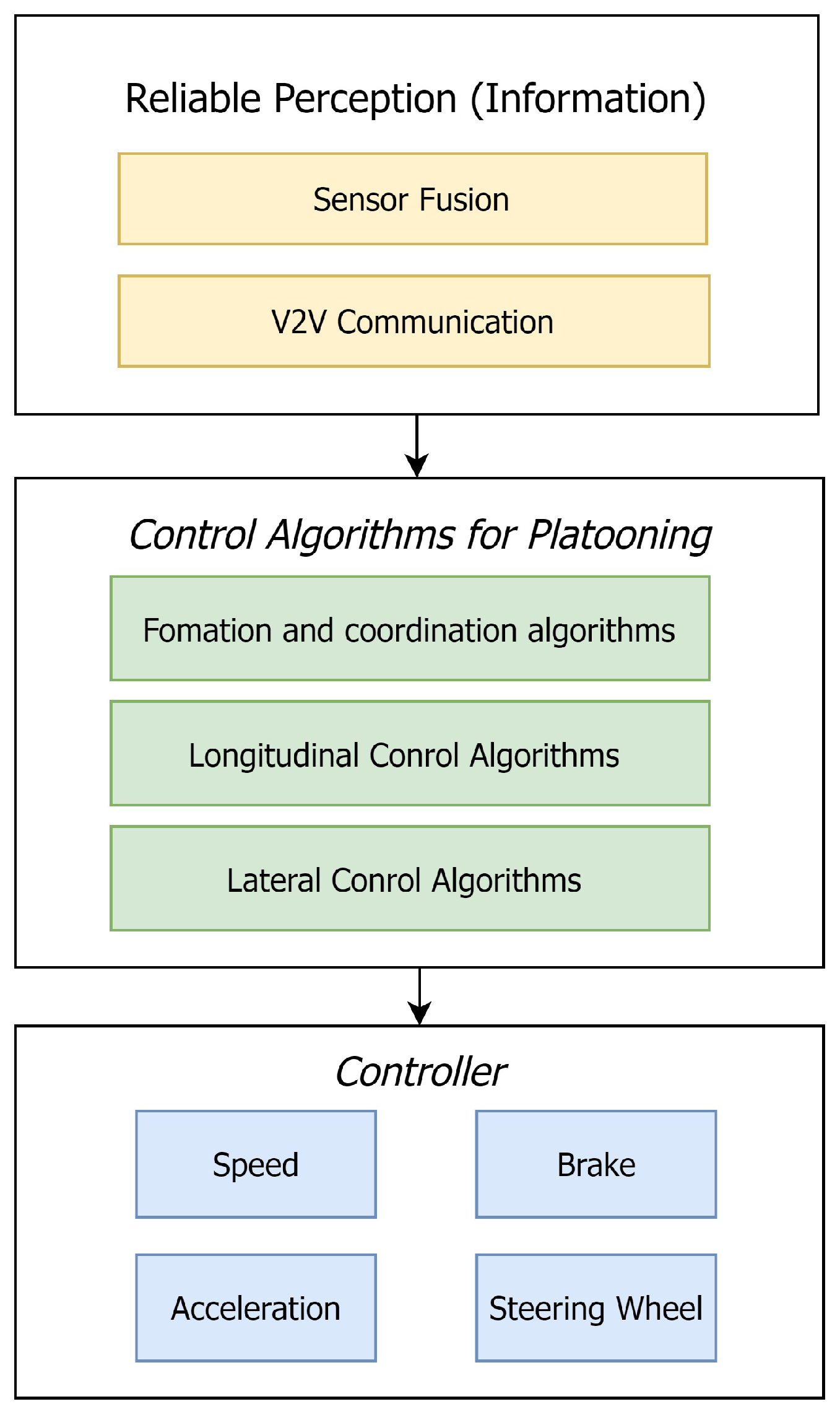
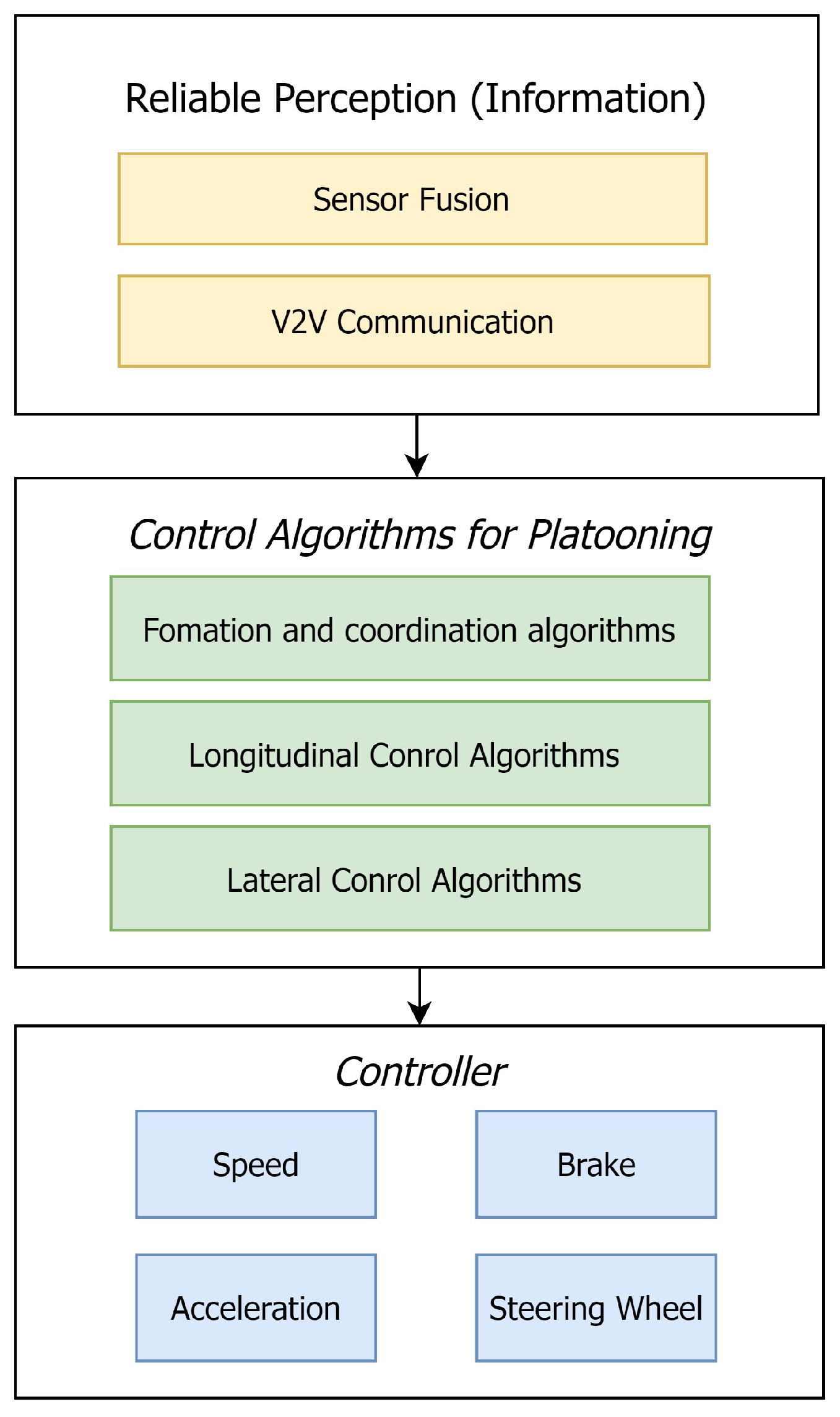
2.1. Theoretical Framework of Platooning
2.2. Smart Intersections
3. Methodology for Combined Platooning and Dynamic Traffic Light Control
3.1. Test Bed for Algorithm Development and Testing: SUMO and TraCI
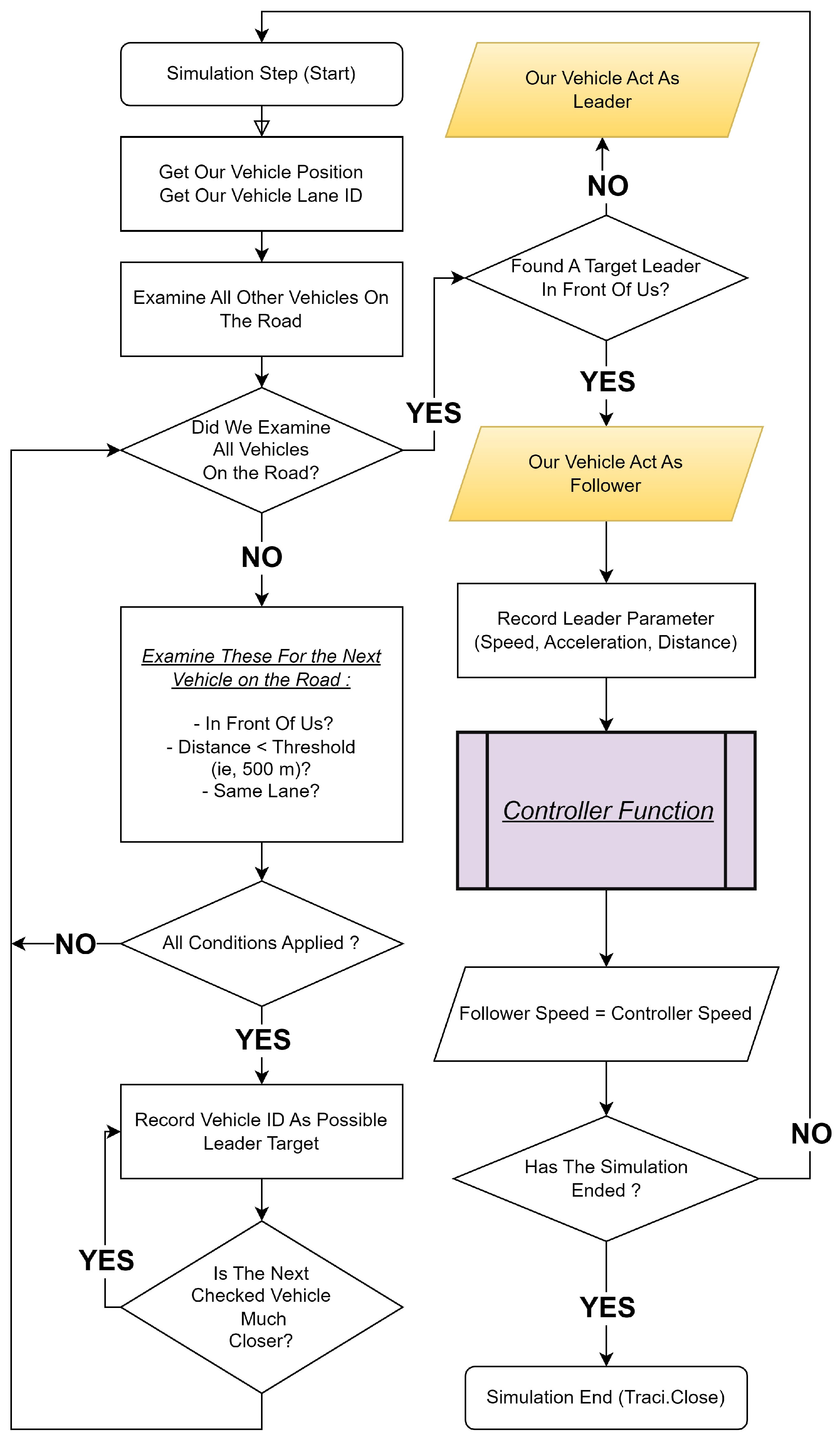
3.2. Platooning Realization Using PID Control
3.2.1. Target Vehicle Selection
3.2.2. The Applied PID Controller
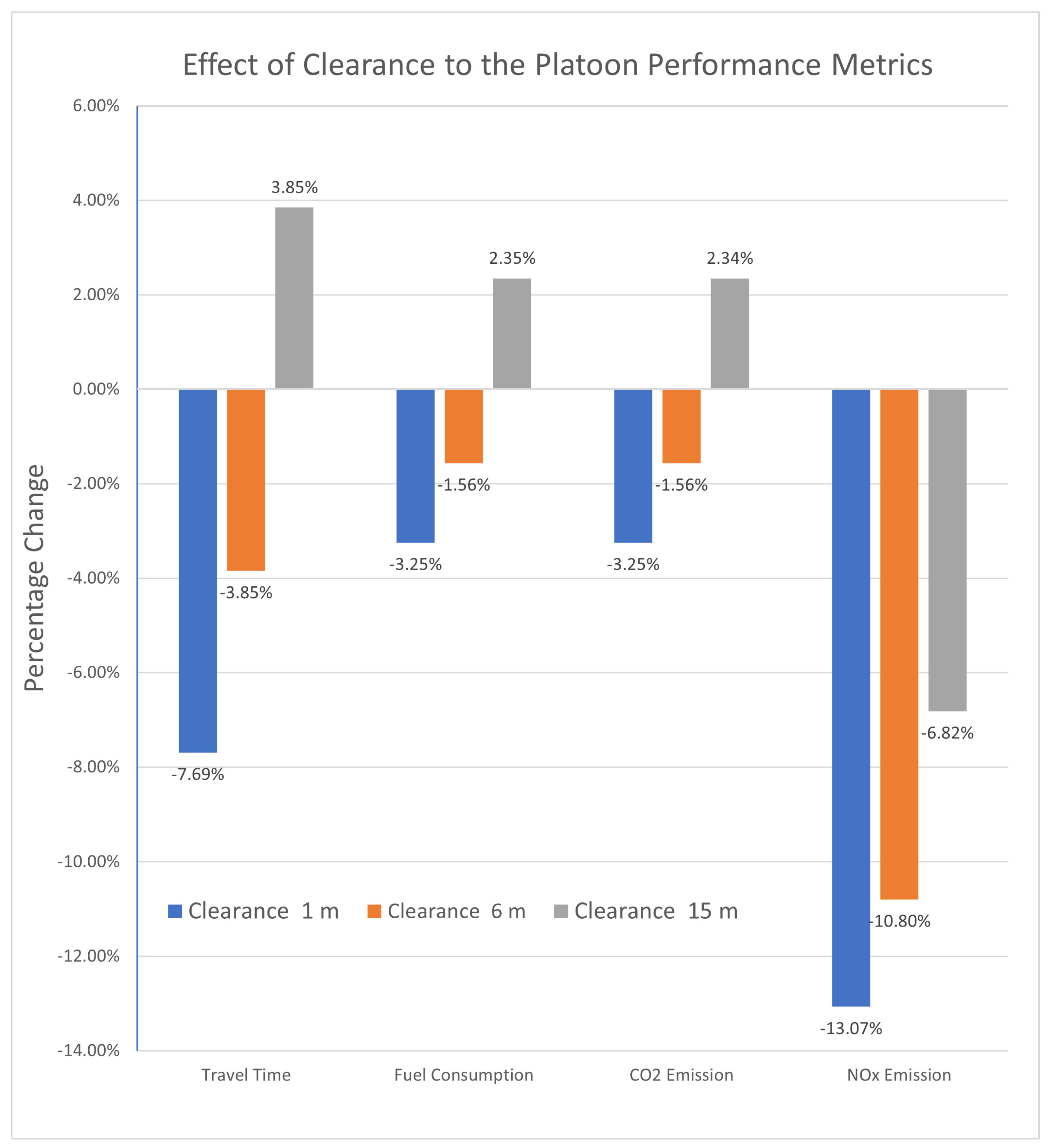
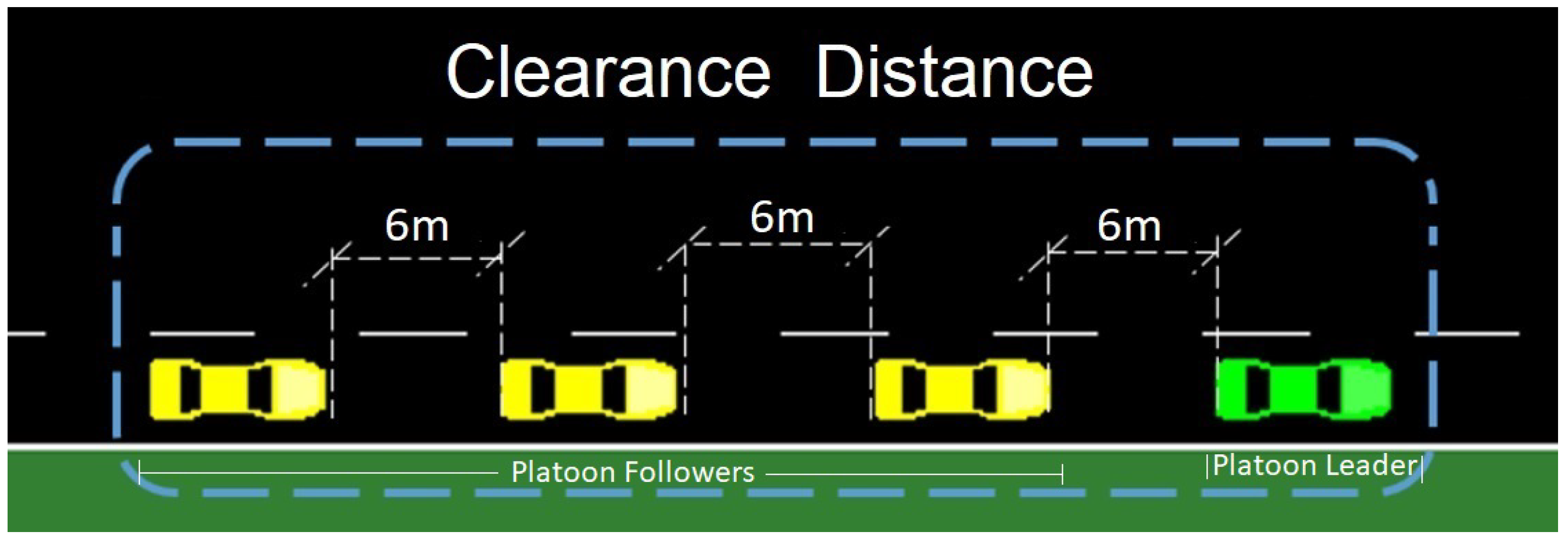
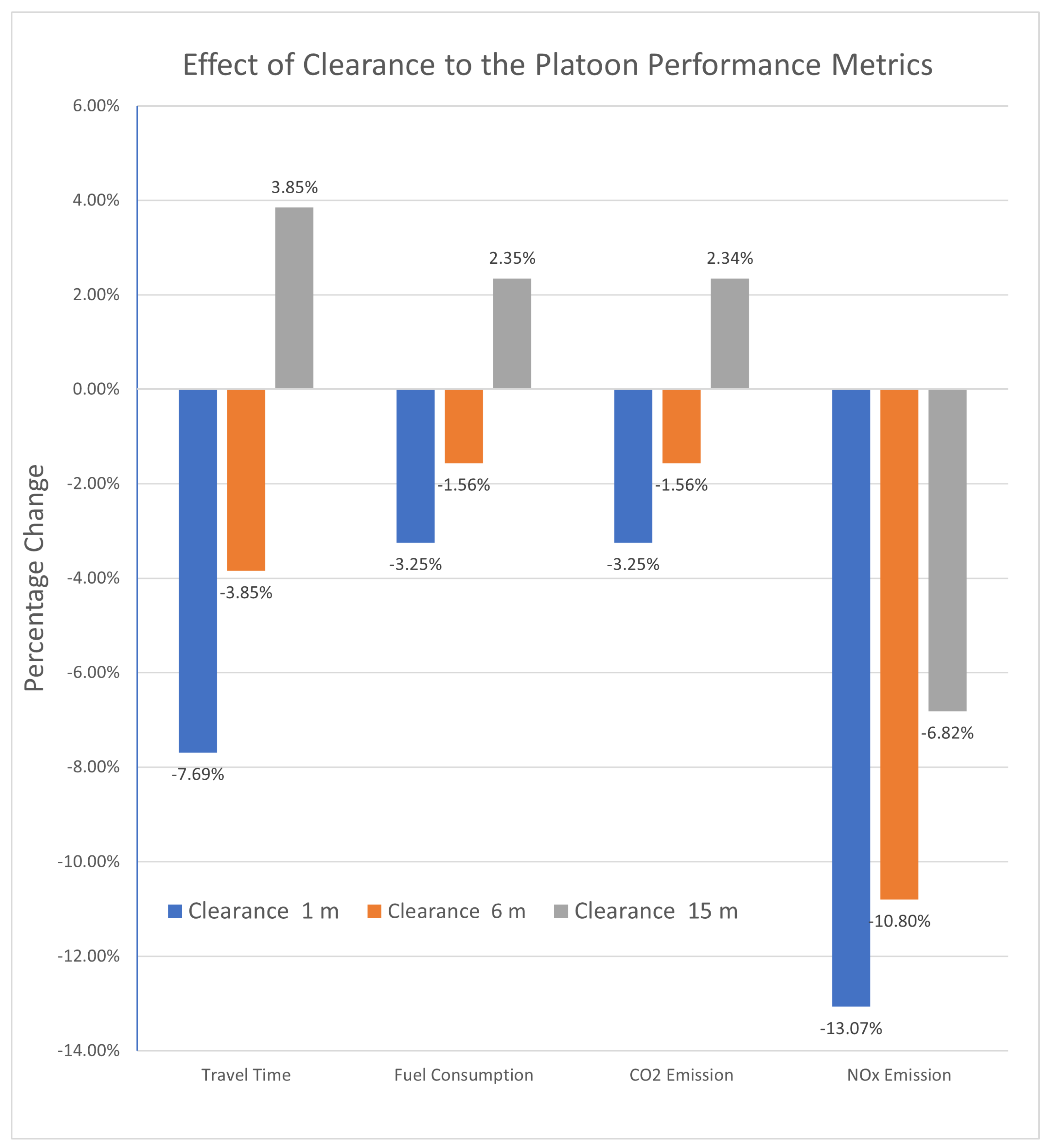
3.2.3. Choosing an Appropriate Clearance Parameter
3.3. Dynamic Traffic Light System (Dynamic TLS)
3.3.1. Methodology
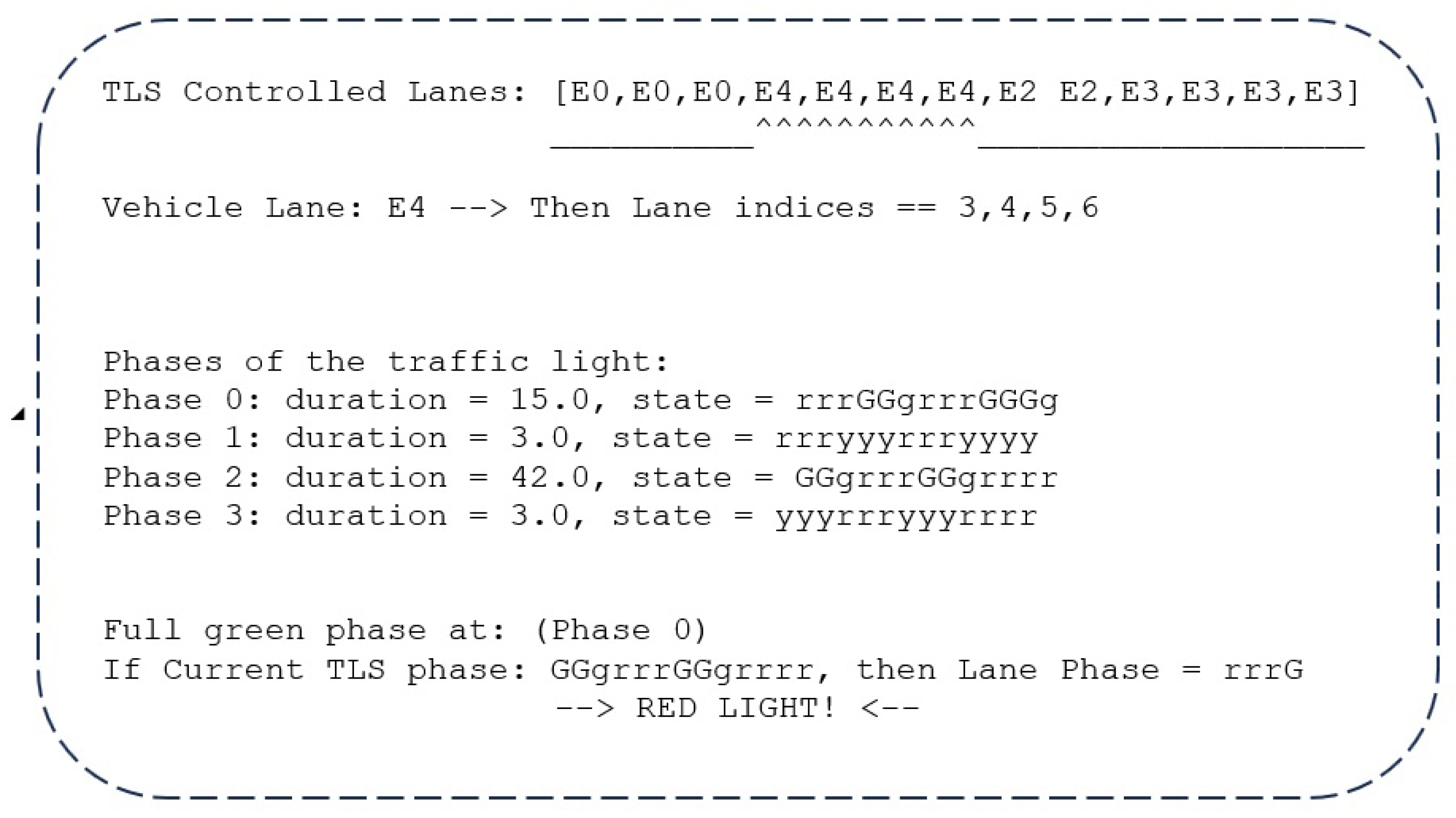
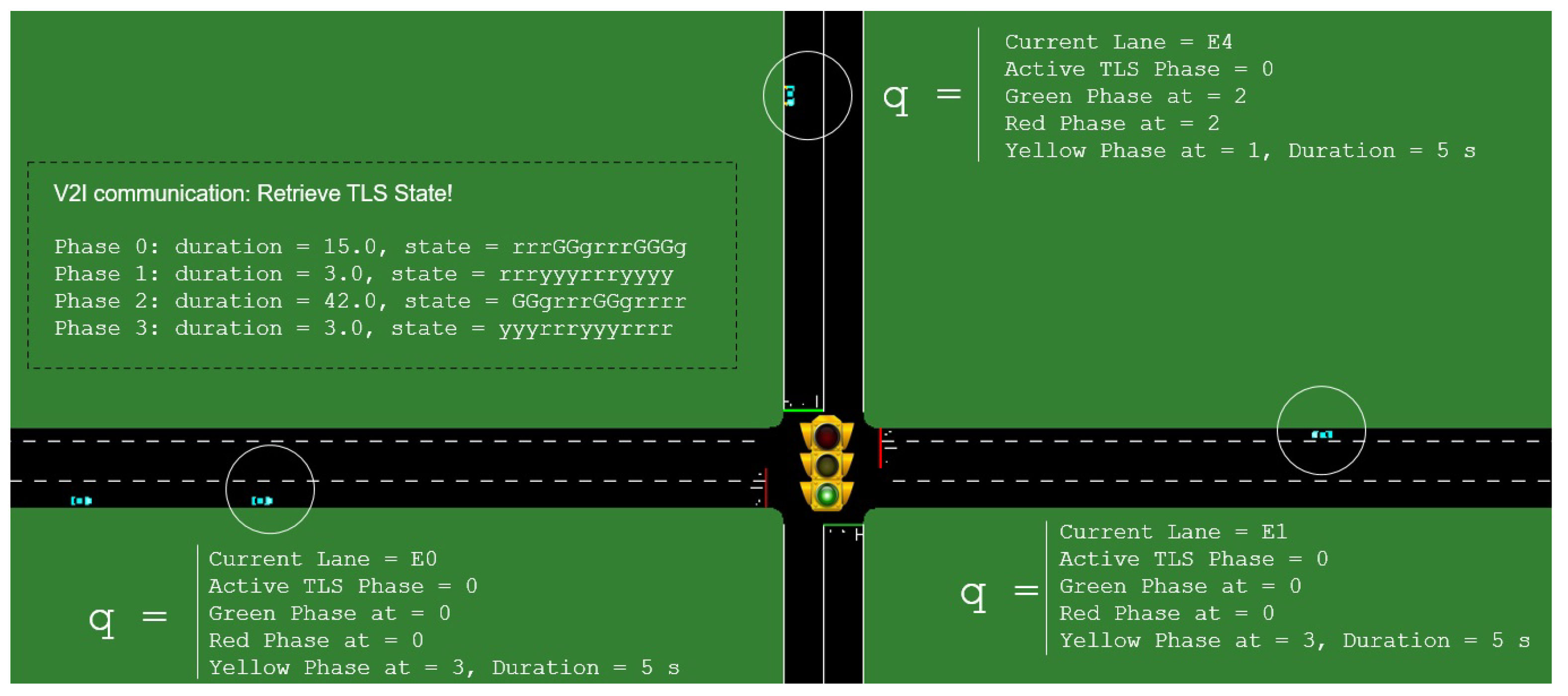
3.3.2. Retrieving the Actual Traffic Signal Phase
- Retrieve TLS-controlled lanes and the current vehicle lane;
- Loop over the TLS-controlled lanes and match the position (index) of the current vehicle lane;
- Retrieve this index, and store it;
- Retrieve the TLS complete logic program and then go through all available phases;
- Check where we have the green phase using the current vehicle lane index.
3.3.3. Situation Awareness
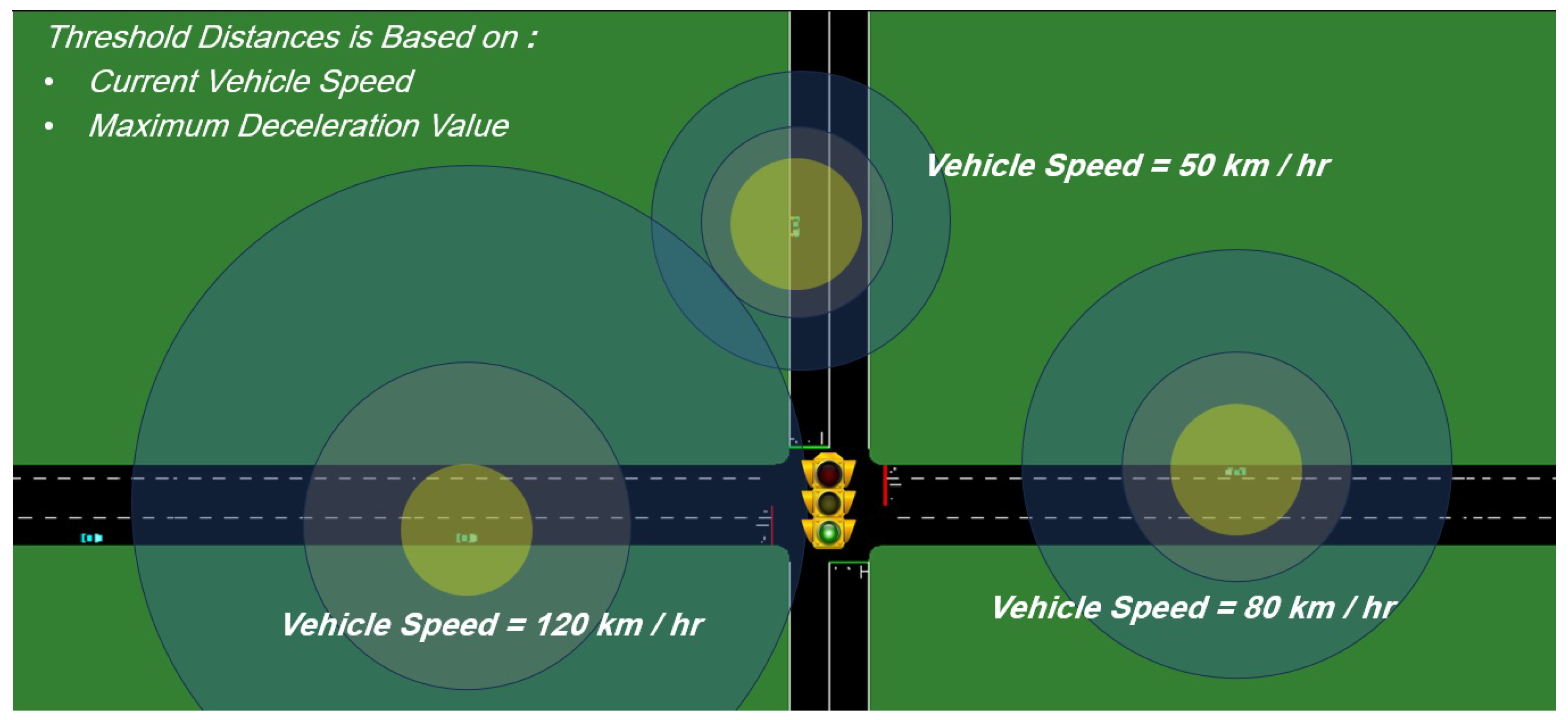
3.3.4. Calculating Distance Threshold
3.3.5. Traveled Distance (1)
3.3.6. Traveled Distance (2)
3.3.7. Traveled Distance (3)
- u is the final velocity (0 m/s, as the vehicle stops);
- v is the reduced speed (m/s);
- a is the deceleration (Max_Deceleration_change m/s2);
- s is the traveled distance.
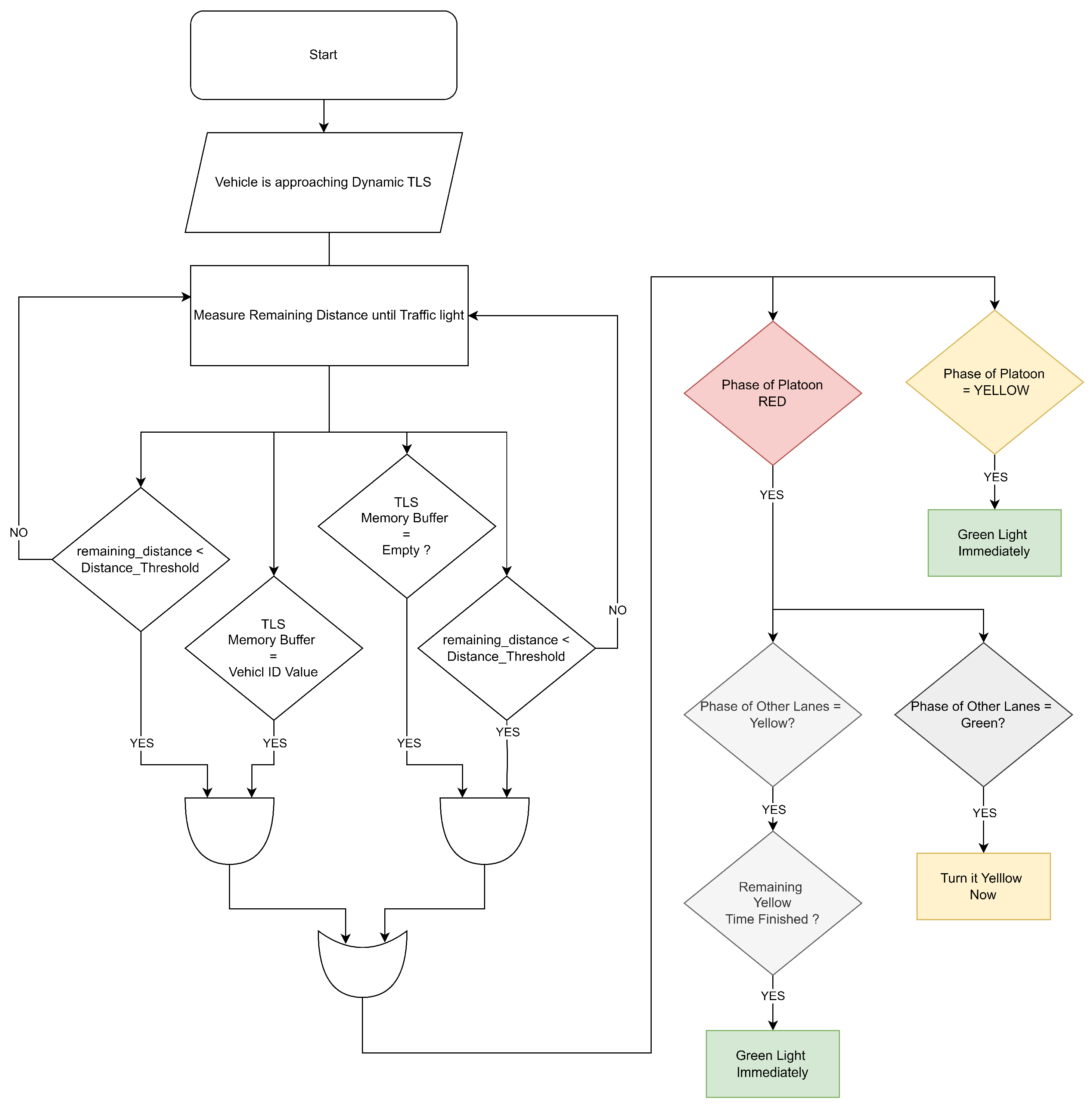
3.4. Initiating Green Traffic Light Phase (Main Algorithm)
- (Remaining distance < threshold) and (TLS buffer memory is empty).
- (Remaining distance < threshold) and (TLS buffer memory has the same ID as the vehicle).
- If we have a yellow light, then initiate a green light.
- If we have a red light, then turn the traffic light of the other lanes to yellow immediately.
- After the yellow light is complete for the other lanes, then turn them immediately to red.
- Turn our traffic light to green if we meet all the possibilities.
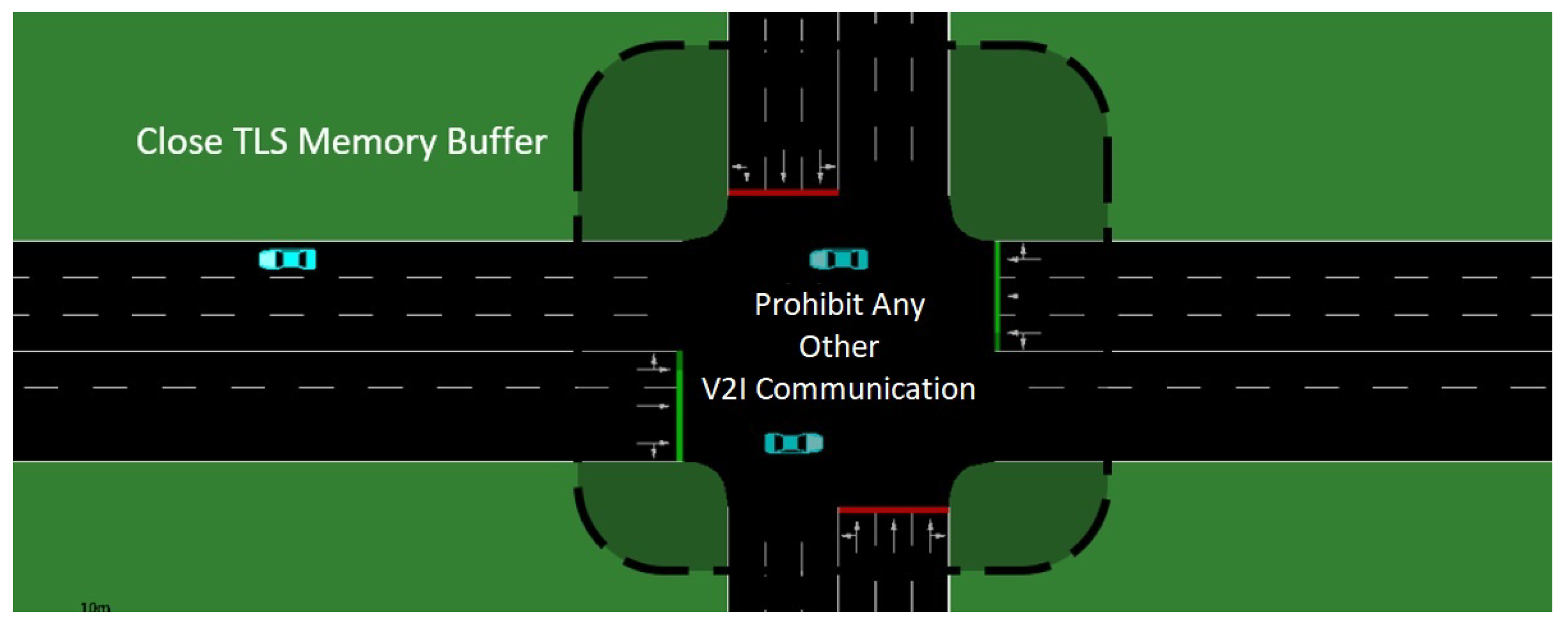
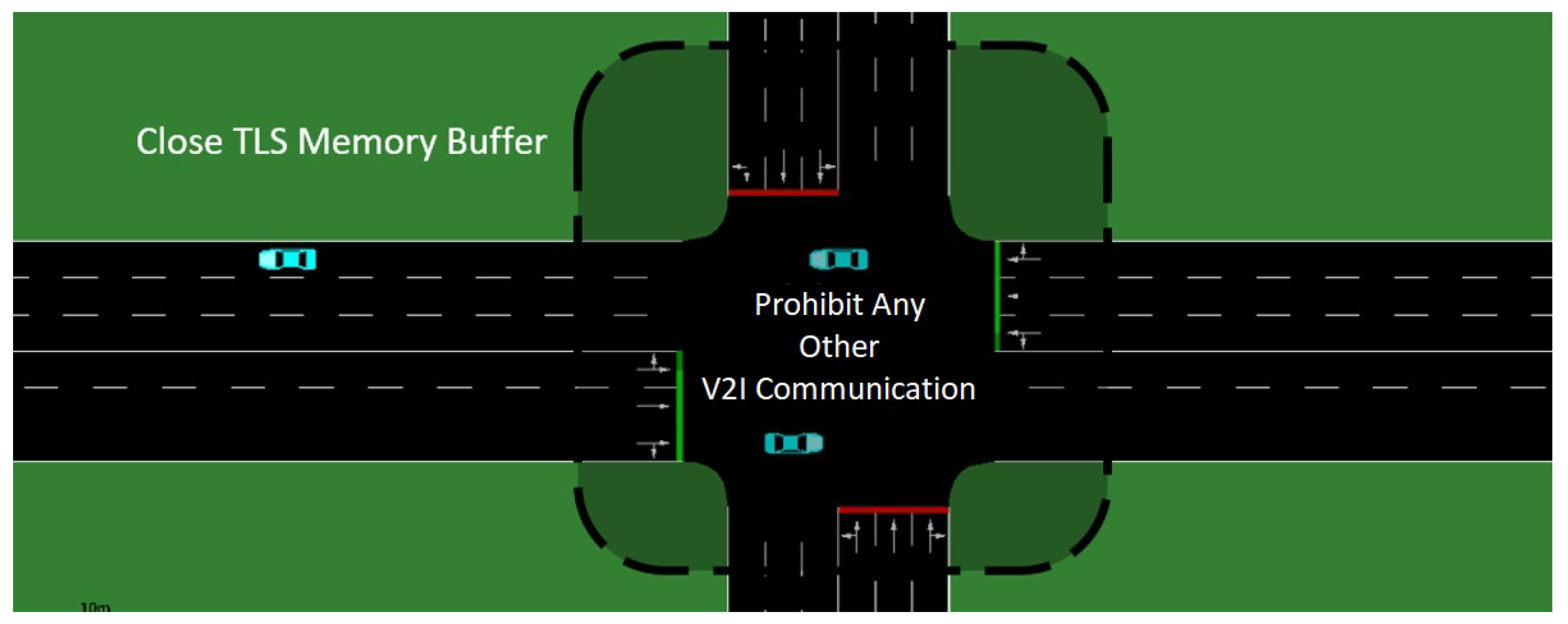
3.5. Introducing TLS Memory Buffer
- If a vehicle has initiated a V2I communication and it can control the TLS logic, then any other communication is blocked.
- If the vehicle has successfully passed the intersection, then the memory is wiped to allow other communication.
- If the actual communication has been lost, then then the memory is wiped to allow other communication.
4. Discussion
4.1. Configuring Test Traffic Network
4.2. Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| CACC | Cooperative Adaptive Cruise Control |
| C-V2X | Cellular vehicle-to-everything |
| DSRC | Dedicated Short Range Communication |
| AEB | Automatic emergency braking |
| GLODTA | Green Light Optimal Dwell Time Advisory |
| GLOSA | Green Light Optimal Speed Advisory |
| ITS | Intelligent Transport Systems |
| I2I | Infrastructure-to-infrastructure |
| Kp | Proportional gain parameter |
| Ki | Integral gain parameter |
| Kd | Derivative gain parameter |
| LIDAR | Light Detection and Ranging |
| PID | Proportional–Integral–Derivative |
| SPaT | Signal Phase and Timing |
| SUMO | Simulation of Urban Mobility |
| TLS | Traffic light system |
| TraCI | Traffic Control Interface |
| V2I | Vehicle-to-infrastructure |
| V2V | Vehicle-to-vehicle |
References
- Balador, A.; Bazzi, A.; Hernandez-Jayo, U.; de la Iglesia, I.; Ahmadvand, H. A survey on vehicular communication for cooperative truck platooning application. Veh. Commun. 2022, 35, 100460. [Google Scholar] [CrossRef]
- Fakhfakh, F.; Tounsi, M.; Mosbah, M. Vehicle platooning systems: Review, classification and validation strategies. Int. J. Netw. Distrib. Comput. 2020, 8, 203–213. [Google Scholar] [CrossRef]
- Kavathekar, P.; Chen, Y. Vehicle platooning: A brief survey and categorization. In Proceedings of the International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Washington, DC, USA, 28–31 August 2011; IEEE: Piscataway, NJ, USA, 2011; Volume 54808, pp. 829–845. [Google Scholar]
- Li, H.; Makkapati, V.P.; Wan, L.; Tomasch, E.; Hoschopf, H.; Eichberger, A. Validation of Automated Driving Function Based on the Apollo Platform: A Milestone for Simulation with Vehicle-in-the-Loop Testbed. Vehicles 2023, 5, 718–731. [Google Scholar] [CrossRef]
- Péter, T.; Szauter, F.; Rózsás, Z.; Lakatos, I. Integrated application of network traffic and intelligent driver models in the test laboratory analysis of autonomous vehicles and electric vehicles. Int. J. Heavy Veh. Syst. 2020, 27, 227. [Google Scholar] [CrossRef]
- Eom, M.; Kim, B.I. The traffic signal control problem for intersections: A review. Eur. Transp. Res. Rev. 2020, 12, 50. [Google Scholar] [CrossRef]
- Wágner, T.; Ormándi, T.; Tettamanti, T.; Varga, I. SPaT/MAP V2X communication between traffic light and vehicles and a realization with digital twin. Comput. Electr. Eng. 2023, 106, 108560. [Google Scholar] [CrossRef]
- Farkas, Z.; Mihály, A.; Gáspár, P. Analysis of Model Predictive Intersection Control for Autonomous Vehicles. Period. Polytech. Transp. Eng. 2023, 51, 209–215. [Google Scholar] [CrossRef]
- Islam, S.B.A.; Hajbabaie, A. Distributed coordinated signal timing optimization in connected transportation networks. Transp. Res. Part C Emerg. Technol. 2017, 80, 272–285. [Google Scholar] [CrossRef]
- Altan, O.D.; Wu, G.; Barth, M.J.; Boriboonsomsin, K.; Stark, J.A. GlidePath: Eco-Friendly Automated Approach and Departure at Signalized Intersections. IEEE Trans. Intell. Veh. 2017, 2, 266–277. [Google Scholar] [CrossRef]
- Liu, H.; Lu, X.Y.; Shladover, S.E. Traffic signal control by leveraging Cooperative Adaptive Cruise Control (CACC) vehicle platooning capabilities. Transp. Res. Part C Emerg. Technol. 2019, 104, 390–407. [Google Scholar] [CrossRef]
- ETSI. ETSI TS 103 191-3 V1.1.1 (2015-09); Technical Report; European Telecommunications Standards Institute: Valbonne, France, 2015. [Google Scholar]
- Kenney, J.B. Dedicated short-range communications (DSRC) standards in the United States. Proc. IEEE 2011, 99, 1162–1182. [Google Scholar] [CrossRef]
- Dey, K.C.; Yan, L.; Wang, X.; Wang, Y.; Shen, H.; Chowdhury, M.; Yu, L.; Qiu, C.; Soundararaj, V. A review of communication, driver characteristics, and controls aspects of cooperative adaptive cruise control (CACC). IEEE Trans. Intell. Transp. Syst. 2015, 17, 491–509. [Google Scholar] [CrossRef]
- Kospach, A.; Irrenfried, C. Truck Platoon Slipstream Effects Assessment. In Energy-Efficient and Semi-Automated Truck Platooning: Research and Evaluation; Springer International Publishing: Cham, Switzerland, 2022; pp. 57–68. [Google Scholar]
- Ziebinski, A.; Cupek, R.; Erdogan, H.; Waechter, S. A survey of ADAS technologies for the future perspective of sensor fusion. In Proceedings of the Computational Collective Intelligence: 8th International Conference, ICCCI 2016, Halkidiki, Greece, 28–30 September 2016; Proceedings, Part II 8. Springer: Cham, Switzerland, 2016; pp. 135–146. [Google Scholar]
- Kocić, J.; Jovičić, N.; Drndarević, V. Sensors and sensor fusion in autonomous vehicles. In Proceedings of the 2018 26th Telecommunications Forum (TELFOR), Belgrade, Serbia, 20–21 November 2018; pp. 420–425. [Google Scholar]
- Chavez-Garcia, R.O.; Aycard, O. Multiple sensor fusion and classification for moving object detection and tracking. IEEE Trans. Intell. Transp. Syst. 2015, 17, 525–534. [Google Scholar] [CrossRef]
- Bayuwindra, A.; Ploeg, J.; Lefeber, E.; Nijmeijer, H. Combined longitudinal and lateral control of car-like vehicle platooning with extended look-ahead. IEEE Trans. Control Syst. Technol. 2019, 28, 790–803. [Google Scholar] [CrossRef]
- Cseh, C. Architecture of the dedicated short-range communications (DSRC) protocol. In Proceedings of the VTC’98, 48th IEEE Vehicular Technology Conference, Pathway to Global Wireless Revolution (Cat. No. 98CH36151), Ottawa, ON, Canada, 18–21 May 1998; Pathway to Global Wireless Revolution (Cat. No. 98CH36151). Volume 3, pp. 2095–2099. [Google Scholar]
- Eichler, S. Performance evaluation of the IEEE 802.11pWAVE communication standard. In Proceedings of the 2007 IEEE 66th Vehicular Technology Conference, Baltimore, MD, USA, 30 September–3 October 2007; pp. 2199–2203. [Google Scholar]
- Seredynski, M.; Khadraoui, D. Complementing Transit Signal Priority with speed and dwell time extension advisories. In Proceedings of the 17th International IEEE Conference on Intelligent Transportation Systems (ITSC), Qingdao, China, 8–11 October 2014; pp. 1009–1014. [Google Scholar]
- Seredynski, M.; Khadraoui, D.; Viti, F. Signal phase and timing (SPaT) for cooperative public transport priority measures. In Proceedings of the 22nd ITS World Congress, Bordeaux, France, 5–9 October 2015. [Google Scholar]
- Lopez, P.A.; Behrisch, M.; Bieker-Walz, L.; Erdmann, J.; Flötteröd, Y.P.; Hilbrich, R.; Lücken, L.; Rummel, J.; Wagner, P.; Wießner, E. Microscopic Traffic Simulation using SUMO. In Proceedings of the 21st IEEE International Conference on Intelligent Transportation Systems, Maui, HI, USA, 4–7 November 2018. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Simulation Statistics | |
|---|---|
| UNCONTROLLED CASE | |
| The traveling time of the platoon is 8578 [s] | |
| The overall fuel consumption is 866,626,097.28 [mL] | |
| The overall CO emission is 71,042,916.87 [mg] | |
| The overall CO2 emission is 2,717,031,380.17 [mg] | |
| The overall NOx emission is 1,110,266.32 [mg] | |
| The total absolute acceleration is 811,577.89 [m/s2] | |
| Percentage Saving % | |
| CONTROLLED CASE (Dynamic TLS control Only) | |
| The traveling time of the platoon is 7315 [s] | 14.72% |
| The overall fuel consumption is 717,236,540.47 [mL] | 17.24% |
| The overall CO emission is 45,389,785.52 [mg] | 36.11% |
| The overall CO2 emission is 2,248,682,109.77 [mg] | 17.24% |
| The overall NOx emission is 893,782.28 [mg] | 19.50% |
| The total absolute acceleration is 683,700.15 [m/s2] | 15.76% |
| CONTROLLED CASE (Network Platooning + Dynamic TLS) | |
| The traveling time of the platoon is 6967 [s] | 18.78% |
| The overall fuel consumption is 707,217,302.56 [mL] | 18.39% |
| The overall CO emission is 42,226,608.01 [mg] | 40.56% |
| The overall CO2 emission is 2,217,274,631.53 [mg] | 18.39% |
| The overall NOx emission is 880,294.35 [mg] | 20.71% |
| The total absolute acceleration is 696,407.48 [m/s2] | 14.19% |
| Average Network Speed | Average Number of Stopped Vehicles/Intersection (Halt Index) | |
|---|---|---|
| Uncontrolled Speed | 33.52 km/h | 6.8 |
| Controlled Speed | 37.22 km/h (+9.2%) | 0.68 +90% Improvement |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Altamimi, H.; Varga, I.; Tettamanti, T. Urban Platooning Combined with Dynamic Traffic Lights. Machines 2023, 11, 920. https://doi.org/10.3390/machines11090920
Altamimi H, Varga I, Tettamanti T. Urban Platooning Combined with Dynamic Traffic Lights. Machines. 2023; 11(9):920. https://doi.org/10.3390/machines11090920
Chicago/Turabian StyleAltamimi, Husam, István Varga, and Tamás Tettamanti. 2023. "Urban Platooning Combined with Dynamic Traffic Lights" Machines 11, no. 9: 920. https://doi.org/10.3390/machines11090920
APA StyleAltamimi, H., Varga, I., & Tettamanti, T. (2023). Urban Platooning Combined with Dynamic Traffic Lights. Machines, 11(9), 920. https://doi.org/10.3390/machines11090920