
Fault Detection and Diagnosis of the Electric Motor Drive and Battery System of Electric Vehicles




Abstract
1. Introduction
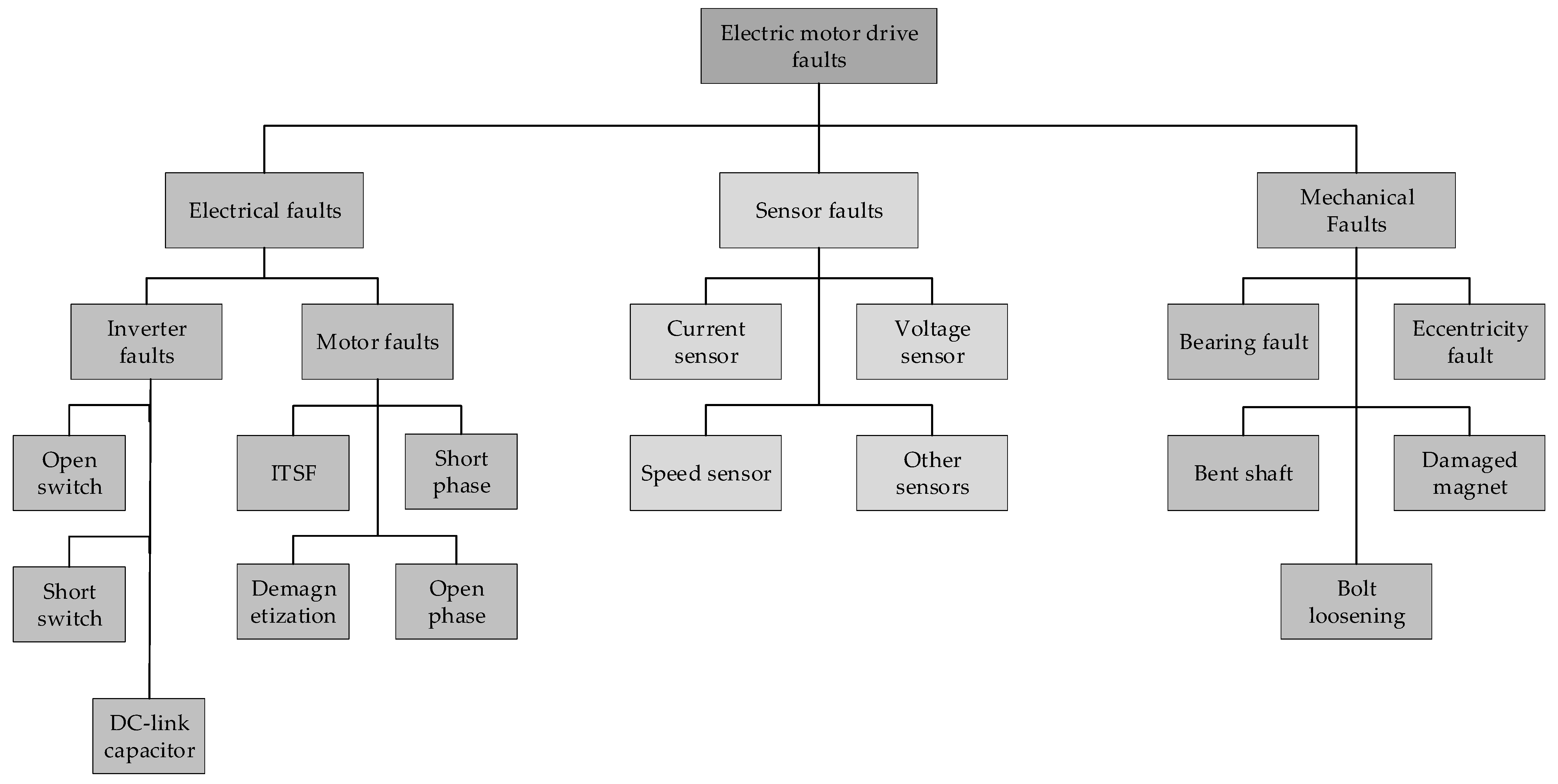
2. Electric Motor Drive Faults
2.1. Electrical Faults
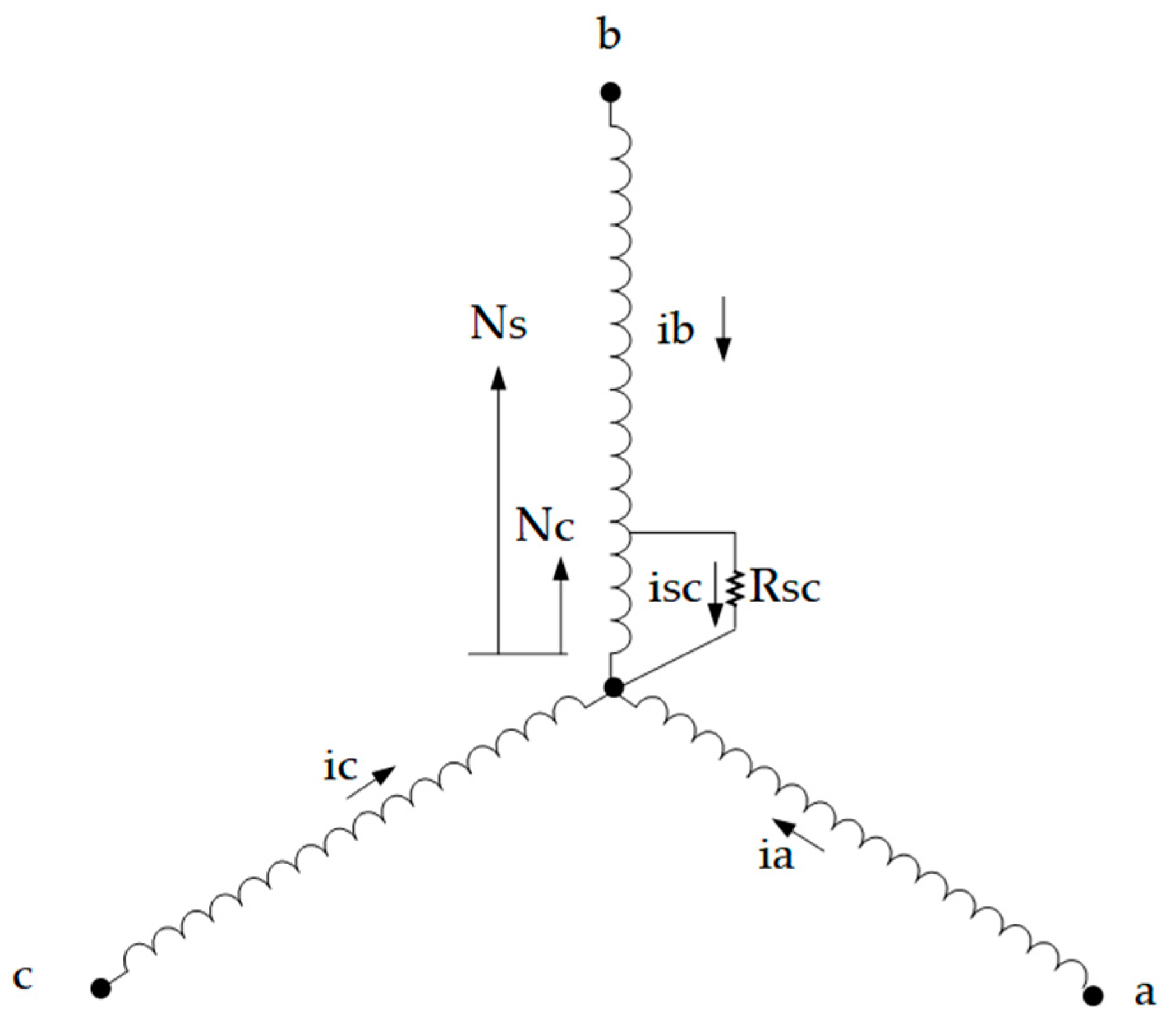
2.1.1. Interturn Short-Circuit Fault
2.1.2. Demagnetization Fault
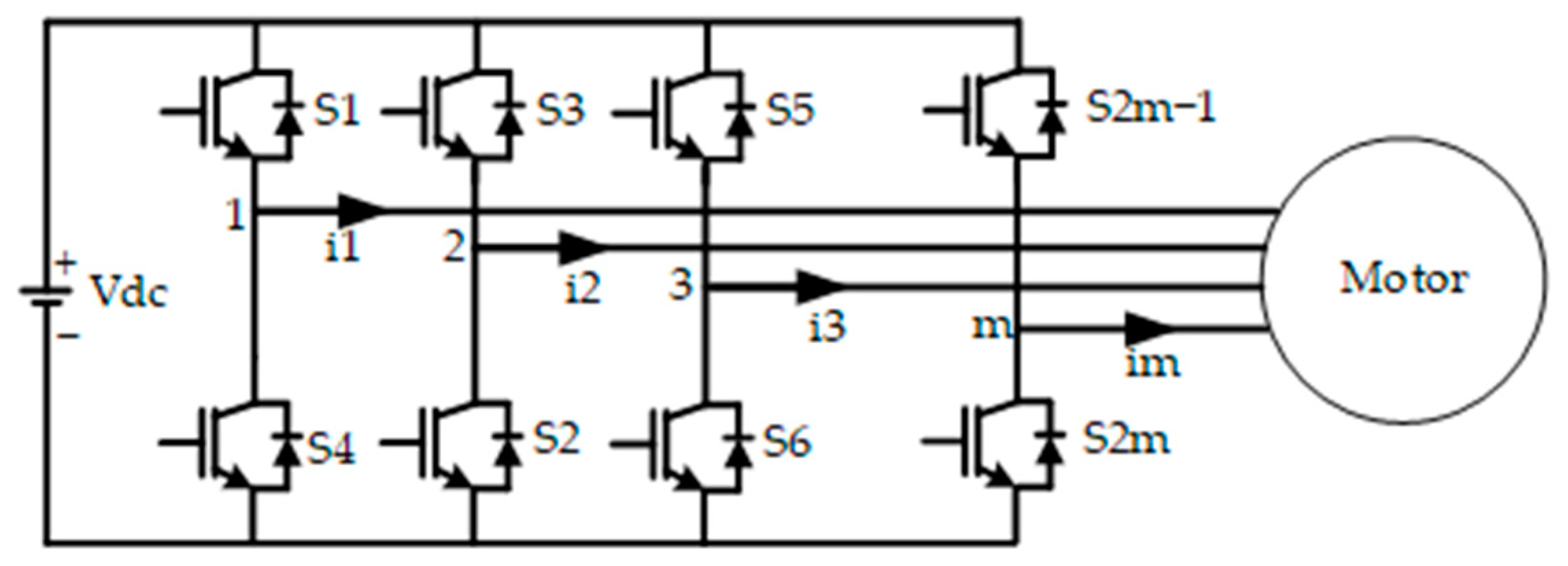
2.1.3. Open or Short Switches in the Inverter
2.2. Mechanical Faults
2.2.1. Bearing Faults
2.2.2. Air–Gap Eccentricity Faults
2.3. Sensor Faults
2.3.1. Current Sensor Faults
2.3.2. Voltage Sensor Faults
2.3.3. Speed or Position Sensor Faults
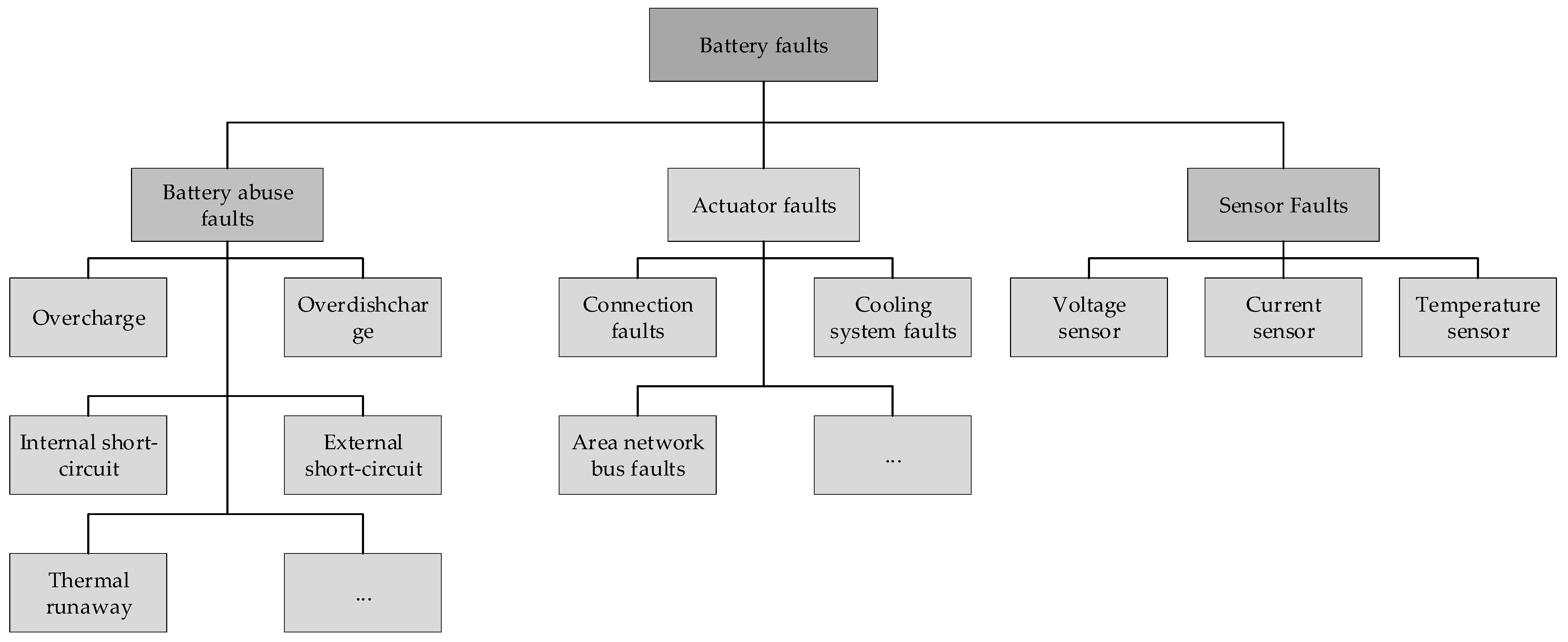
3. Battery System Faults
3.1. Battery Abuse Faults
3.2. Actuator Faults
3.3. Sensor Faults
4. Fault Detection and Diagnosis of Electric Motor Drives
4.1. Model-Based FDD Methods
4.2. Signal-Based FDD Methods
5. Data-Driven FDD Methods for Electric Motor Drive
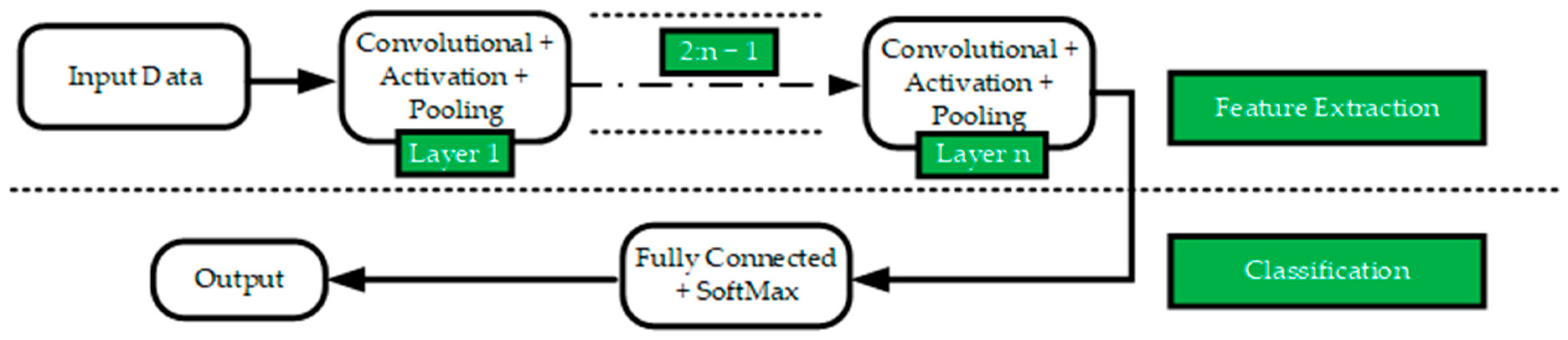
- CNN: This is an AI tool that is based on the human brain visual system and multi-layer NN. It works along with supervised learning and labelled data for fault classification, including four layers, the convolutional layer, pooling layer, fully connected layer and softmax layer, as shown in Figure 14. As mentioned, deep learning methods extract features automatically from the raw data. In CNN, the first two layers, including the convolutional and pooling layer, are responsible for this duty and classification is preformed through the fully connected and softmax layer [112]. CNN-based FDD methods are a hot research topic in fault detection. They not only can detect and diagnose faults but they can also reveal the severity of faults. They are very effective, highly accurate, and fast for FDD applications. However, they need higher computational power, more training time and more complex structures [113]. As time-domain signals are in 1D format, in some studies, CNN is used as 1D CNN. Also, by converting the signals to 2D format as grayscale images, 2D CNN has been utilized in many recent studies [114] Comparing 1D and 2D CNN, 1D usually shows higher accuracy and needs less human expertise as the conversion level is eliminated [115].
- Recurrent neural network (RNN) is a sophisticated sequence-data-learning machine developed to learn the time dependency of time series data [117]. The recurrent connections in the hidden layers result in a good ability to extract the patterns and make predictions in sequential data.


5.1. Recent Data-Driven FDD Methods for Different PMSM Motor Drive Faults
5.1.1. Recent Data-Driven FDD Methods for Electrical Faults
5.1.2. Recent Data-Driven FDD Methods for Mechanical Faults
5.1.3. Recent Data-Driven FDD Methods for Sensor Faults
6. EVs’ Battery Fault Detection
6.1. Model-Based FDD Methods for Battery Faults
6.2. Signal-Based FDD Methods for Battery Faults
6.3. Data-Driven FDD Methods for Battery Faults
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Popescu, M.; Goss, J.; Staton, D.A.; Hawkins, D.; Chong, Y.C.; Boglietti, A. Electrical Vehicles—Practical Solutions for Power Traction Motor Systems. IEEE Trans. Ind. Appl. 2018, 54, 2751–2762. [Google Scholar] [CrossRef]
- Wang, X.; Wang, Z.; Xu, Z.; Cheng, M.; Wang, W.; Hu, Y. Comprehensive Diagnosis and Tolerance Strategies for Electrical Faults and Sensor Faults in Dual Three-Phase PMSM Drives. IEEE Trans. Power Electron. 2019, 34, 6669–6684. [Google Scholar] [CrossRef]
- Zhang, L.; Zhu, C.; Yu, S.; Ge, D.; Zhou, H. Status and challenges facing representative anode materials for rechargeable lithium batteries. J. Energy Chem. 2022, 66, 260–294. [Google Scholar] [CrossRef]
- Shete, S.; Jog, P.; Kamalakannan, R.; Raghesh, J.T.A.; Manikandan, S.; Kumawat, R.K. Fault Diagnosis of Electric Vehicle’s Battery by Deploying Neural Network. In Proceedings of the 6th International Conference on I-SMAC (IoT in Social, Mobile, Analytics and Cloud), I-SMAC, Dharan, Nepal, 10–12 November 2022; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2022; pp. 346–351. [Google Scholar] [CrossRef]
- Lang, W.; Hu, Y.; Gong, C.; Zhang, X.; Xu, H.; Deng, J. Artificial Intelligence-Based Technique for Fault Detection and Diagnosis of EV Motors: A Review. IEEE Trans. Transp. Electrif. 2022, 8, 384–406. [Google Scholar] [CrossRef]
- Bhuiyan, E.A.; Akhand, M.A.; Das, S.K.; Ali, F.; Tasneem, Z.; Islam, R.; Saha, D.K.; Badal, F.R.; Ahamed, H.; Moyeen, S.I. A Survey on Fault Diagnosis and Fault Tolerant Methodologies for Permanent Magnet Synchronous Machines. Int. J. Autom. Comput. 2020, 17, 763–787. [Google Scholar] [CrossRef]
- Niu, X.; Zhu, L.; Ding, H. New statistical moments for the detection of defects in rolling element bearings. Int. J. Adv. Manuf. Technol. 2005, 26, 1268–1274. [Google Scholar] [CrossRef]
- Moosavi, S.; Djerdir, A.; Ait-Amirat, Y.; Khaburi, D. ANN based fault diagnosis of permanent magnet synchronous motor under stator winding shorted turn. Electr. Power Syst. Res. 2015, 125, 67–82. [Google Scholar] [CrossRef]
- Nandi, S. Detection of stator faults in induction machines using residual saturation harmonics. IEEE Trans. Ind. Appl. 2006, 42, 1201–1208. [Google Scholar] [CrossRef]
- Bonnett, A.; Soukup, G. Cause and analysis of stator and rotor failures in three-phase squirrel-cage induction motors. IEEE Trans. Ind. Appl. 1992, 28, 921–937. [Google Scholar] [CrossRef]
- Urresty, J.-C.; Riba, J.-R.; Romeral, L. Diagnosis of interturn faults in pmsms operating under nonstationary conditions by applying order tracking filtering. IEEE Trans. Power Electron. 2013, 28, 507–515. [Google Scholar] [CrossRef]
- Kim, K.-H.; Choi, D.-U.; Gu, B.-G.; Jung, I.-S. Fault model and performance evaluation of an inverter-fed permanent magnet synchronous motor under winding shorted turn and inverter switch open. IET Electr. Power Appl. 2010, 4, 214–225. [Google Scholar] [CrossRef]
- Kim, K.-T.; Park, J.-K.; Kim, B.-W.; Hur, J. Comparison of the fault characteristics of IPM-type and SPM-type BLDC motors under Inter-Turn Faults conditions using Winding Function Theory. In Proceedings of the 2012 IEEE Energy Conversion Congress and Exposition, ECCE, Raleigh, NC, USA, 15–20 September 2012; pp. 1262–1269. [Google Scholar] [CrossRef]
- Lee, Y.-S.; Kim, K.-T.; Hur, J. Finite-element analysis of the demagnetization of IPM-type BLDC motor with stator turn fault. IEEE Trans. Magn. 2014, 50, 889–892. [Google Scholar] [CrossRef]
- Qi, Y.; Bostanci, E.; Gurusamy, V.; Akin, B. A Comprehensive Analysis of Short-Circuit Current Behavior in PMSM Interturn Short-Circuit Faults. IEEE Trans. Power Electron. 2018, 33, 10784–10793. [Google Scholar] [CrossRef]
- Lee, H.; Jeong, H.; Kim, S.W. Detection of Interturn Short-Circuit Fault and Demagnetization Fault in IPMSM by 1-D Convolutional Neural Network. In Proceedings of the 2019 IEEE PES Asia-Pacific Power and Energy Engineering Conference (APPEEC), Macao, China, 1–4 December 2019. [Google Scholar]
- Hong, J.; Park, S.; Hyun, D.; Kang, T.-J.; Bin Lee, S.; Kral, C.; Haumer, A. Detection and Classification of Rotor Demagnetization and Eccentricity Faults for PM Synchronous Motors. IEEE Trans. Ind. Appl. 2012, 48, 923–932. [Google Scholar] [CrossRef]
- Kim, K.-C.; Lim, S.-B.; Koo, D.-H.; Lee, J. The Shape Design of Permanent Magnet for Permanent Magnet Synchronous Motor Considering Partial Demagnetization. IEEE Trans. Magn. 2006, 42, 3485–3487. [Google Scholar] [CrossRef]
- Ruoho, S.; Kolehmainen, J.; Ikaheimo, J.; Arkkio, A. Interdependence of demagnetization, loading, and temperature rise in a permanent-magnet synchronous motor. IEEE Trans. Magn. 2010, 46, 949–953. [Google Scholar] [CrossRef]
- Espinosa, A.G.; Rosero, J.A.; Cusido, J.; Romeral, L.; Ortega, J.A. Fault detection by means of Hilbert-Huang transform of the stator current in a PMSM with demagnetization. IEEE Trans. Energy Convers. 2010, 25, 312–318. [Google Scholar] [CrossRef]
- Joo, D.; Cho, J.-H.; Woo, K.; Kim, B.-T.; Kim, D.-K. Electromagnetic field and thermal linked analysis of interior permanent-magnet synchronous motor for agricultural electric vehicle. IEEE Trans. Magn. 2011, 47, 4242–4245. [Google Scholar] [CrossRef]
- Faiz, J.; Nejadi-Koti, H. Demagnetization Fault Indexes in Permanent Magnet Synchronous Motors—An Overview. IEEE Trans. Magn. 2016, 52, 8201511. [Google Scholar] [CrossRef]
- Yang, Z.; Shi, X.; Krishnamurthy, M. Vibration monitoring of PM synchronous machine with partial demagnetization and inter-turn short circuit faults. In Proceedings of the 2014 IEEE Transportation Electrification Conference and Expo: Components, Systems, and Power Electronics—From Technology to Business and Public Policy, ITEC, Beijing, China, 31 August–3 September 2014; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2014. [Google Scholar] [CrossRef]
- Zhang, Z.; Luo, G.; Zhang, Z.; Tao, X. A hybrid diagnosis method for inverter open-circuit faults in PMSM drives. CES Trans. Electr. Mach. Syst. 2020, 4, 180–189. [Google Scholar] [CrossRef]
- Cai, B.; Zhao, Y.; Liu, H.; Xie, M. A Data-Driven Fault Diagnosis Methodology in Three-Phase Inverters for PMSM Drive Systems. IEEE Trans. Power Electron. 2017, 32, 5590–5600. [Google Scholar] [CrossRef]
- Gan, C.; Chen, Y.; Qu, R.; Yu, Z.; Kong, W.; Hu, Y. An Overview of Fault-Diagnosis and Fault-Tolerance Techniques for Switched Reluctance Machine Systems. IEEE Access 2019, 7, 174822–174838. [Google Scholar] [CrossRef]
- Liu, Z.; Fang, L.; Jiang, D.; Qu, R. A Machine-Learning-Based Fault Diagnosis Method With Adaptive Secondary Sampling for Multiphase Drive Systems. IEEE Trans. Power Electron. 2022, 37, 8767–8772. [Google Scholar] [CrossRef]
- Siddiqui, K.M.; Bakhsh, F.I.; Ahmad, R.; Solanki, V. Advanced Signal Processing Based Condition Monitoring of PMSM for Stator-inter Turn Fault. In Proceedings of the 2021 IEEE 8th Uttar Pradesh Section International Conference on Electrical, Electronics and Computer Engineering, UPCON, Dehradun, India, 11–13 November 2021; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2021. [Google Scholar] [CrossRef]
- Nandi, S.; Toliyat, H.A.; Li, X. Condition monitoring and fault diagnosis of electrical motors—A review. IEEE Trans. Energy Convers. 2005, 20, 719–729. [Google Scholar] [CrossRef]
- Ewert, P.; Orlowska-Kowalska, T.; Jankowska, K. Effectiveness analysis of pmsm motor rolling bearing fault detectors based on vibration analysis and shallow neural networks. Energies 2021, 14, 712. [Google Scholar] [CrossRef]
- Guo, Z.; Yang, M.; Huang, X. Bearing fault diagnosis based on speed signal and CNN model. Energy Rep. 2022, 8, 904–913. [Google Scholar] [CrossRef]
- Park, Y.; Fernandez, D.; Bin Lee, S.; Hyun, D.; Jeong, M.; Kommuri, S.K.; Cho, C.; Reigosa, D.D.; Briz, F. Online Detection of Rotor Eccentricity and Demagnetization Faults in PMSMs Based on Hall-Effect Field Sensor Measurements. IEEE Trans. Ind. Appl. 2019, 55, 2499–2509. [Google Scholar] [CrossRef]
- Choi, K.; Kim, Y.; Kim, S.-K.; Kim, K.-S. Current and Position Sensor Fault Diagnosis Algorithm for PMSM Drives Based on Robust State Observer. IEEE Trans. Ind. Electron. 2021, 68, 5227–5236. [Google Scholar] [CrossRef]
- Xia, J.; Guo, Y.; Dai, B.; Zhang, X. Sensor Fault Diagnosis and System Reconfiguration Approach for an Electric Traction PWM Rectifier Based on Sliding Mode Observer. IEEE Trans. Ind. Appl. 2017, 53, 4768–4778. [Google Scholar] [CrossRef]
- El Khil, S.K.; Jlassi, I.; Estima, J.; Mrabet-Bellaaj, N.; Cardoso, A.M. Current sensor fault detection and isolation method for PMSM drives, using average normalised currents. Electron. Lett. 2016, 52, 1434–1436. [Google Scholar] [CrossRef]
- Kang, Y.; Duan, B.; Zhou, Z.; Shang, Y.; Zhang, C. Online multi-fault detection and diagnosis for battery packs in electric vehicles. Appl. Energy 2020, 259, 114170. [Google Scholar] [CrossRef]
- Lelie, M.; Braun, T.; Knips, M.; Nordmann, H.; Ringbeck, F.; Zappen, H.; Sauer, D.U. Battery management system hardware concepts: An overview. Appl. Sci. 2018, 8, 534. [Google Scholar] [CrossRef]
- Rheinfeld, A.; Sturm, J.; Frank, A.; Kosch, S.; Erhard, S.V.; Jossen, A. Impact of Cell Size and Format on External Short Circuit Behavior of Lithium-Ion Cells at Varying Cooling Conditions: Modeling and Simulation. J. Electrochem. Soc. 2019, 167, 013511. [Google Scholar] [CrossRef]
- Ouyang, M.; Zhang, M.; Feng, X.; Lu, L.; Li, J.; He, X.; Zheng, Y. Internal short circuit detection for battery pack using equivalent parameter and consistency method. J. Power Source 2015, 294, 272–283. [Google Scholar] [CrossRef]
- Liu, G.; Ouyang, M.; Lu, L.; Li, J.; Han, X. Analysis of the heat generation of lithium-ion battery during charging and discharging considering different influencing factors. J. Therm. Anal. Calorim. 2014, 116, 1001–1010. [Google Scholar] [CrossRef]
- Samanta, A.; Chowdhuri, S.; Williamson, S.S. Machine Learning-Based Data-Driven Fault Detection/Diagnosis of Lithium-Ion Battery: A Critical Review. Electronics 2021, 10, 1309. [Google Scholar] [CrossRef]
- Mehrjou, M.R.; Mariun, N.; Karami, M.; Misron, N.; Radzi, M.A.M. Statistical features analysis of transient current signal for broken bars fault detection in LS-PMSMs. In Proceedings of the 2015 IEEE International Conference on Smart Instrumentation, Measurement and Applications, ICSIMA, Kuala Lumpur, Malaysia, 24–25 November 2015; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2016. [Google Scholar] [CrossRef]
- He, Z.; Wang, Z.; Duan, C.; Wang, X. Fault Diagnosis of Inter-turn Short Circuit Faults in Dual Three-Phase PMSM Drives. In Proceedings of the 2021 IEEE 13th International Symposium on Diagnostics for Electrical Machines, Power Electronics and Drives, SDEMPED, Dallas, TX, USA, 22–25 August 2021; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2021; pp. 388–394. [Google Scholar] [CrossRef]
- Chowdhury, M.H. Modeling of faults in permanent magnet synchronous machines. In Proceedings of the 2016 IEEE Transportation Electrification Conference and Expo, Asia-Pacific, ITEC Asia-Pacific, Busan, Republic of Korea, 1–4 June 2016; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2016; pp. 246–250. [Google Scholar] [CrossRef]
- Gao, Z.; Cecati, C.; Ding, S.X. A Survey of Fault Diagnosis and Fault-Tolerant Techniques—Part I: Fault Diagnosis With Model-Based and Signal-Based Approaches. IEEE Trans. Ind. Electron. 2015, 62, 3757–3767. [Google Scholar] [CrossRef]
- Dai, X.; Gao, Z. From Model, Signal to Knowledge: A Data-Driven Perspective of Fault Detection and Diagnosis. IEEE Trans. Ind. Inform. 2013, 9, 2226–2238. [Google Scholar] [CrossRef]
- Skliros, C.; Miguez, M.E.; Fakhre, A.; Jennions, I. A review of model based and data driven methods targeting hardware systems diagnostics. Diagnostyka 2019, 20, 3–21. [Google Scholar] [CrossRef]
- Gonzalez-Jimenez, D.; Del-Olmo, J.; Poza, J.; Garramiola, F.; Madina, P. Data-driven fault diagnosis for electric drives: A review. Sensors 2021, 21, 4024. [Google Scholar] [CrossRef]
- Isermann, R. Model-based fault-detection and diagnosis–status and applications. Annu. Rev. Control 2005, 29, 71–85. [Google Scholar] [CrossRef]
- Jankowska, K.; Dybkowski, M. Experimental Analysis of the Current Sensor Fault Detection Mechanism Based on Cri Markers in the PMSM Drive System. Appl. Sci. 2022, 12, 9405. [Google Scholar] [CrossRef]
- Bouslimani, S.; Drid, S.; Chrifi-Alaoui, L.; Delahoche, L. On line inter-turn short-circuit fault diagnosis and nonlinear control of PMSM. In Proceedings of the 2022 19th IEEE International Multi-Conference on Systems, Signals and Devices, SSD, Sétif, Algeria, 6–10 May 2022; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2022; pp. 1139–1143. [Google Scholar] [CrossRef]
- Berriri, H.; Naouar, M.W.; Slama-Belkhodja, I. Easy and fast sensor fault detection and isolation algorithm for electrical drives. IEEE Trans. Power Electron. 2011, 27, 490–499. [Google Scholar] [CrossRef]
- Mouzakitis, A. Classification of fault diagnosis methods for control systems. Meas. Control 2013, 46, 303–308. [Google Scholar] [CrossRef]
- Freire, N.M.A.; Estima, J.O.; Cardoso, A.J.M. A voltage-based approach without extra hardware for open-circuit fault diagnosis in closed-loop PWM AC regenerative drives. IEEE Trans. Ind. Electron. 2014, 61, 4960–4970. [Google Scholar] [CrossRef]
- An, Q.-T.; Sun, L. Current residual vector-based open-switch fault diagnosis of inverters in PMSM drive systems. IEEE Trans. Power Electron. 2015, 30, 2814–2827. [Google Scholar] [CrossRef]
- Karimi, S.; Poure, P.; Saadate, S. Fast power switch failure detection for fault tolerant voltage source inverters using FPGA. IET Power Electron. 2009, 2, 346–354. [Google Scholar] [CrossRef]
- Upadhyay, A.; Alakula, M. A Stator Flux Linkage DC Offset Based Stator Fault Detection For PMSM Drive Systems. In Proceedings of the IECON Proceedings (Industrial Electronics Conference), Brussels, Belgium, 17–20 October 2022; IEEE Computer Society: Washington, DC, USA, 2022. [Google Scholar] [CrossRef]
- Mazzoletti, M.A.; Bossio, G.R.; De Angelo, C.H.; Espinoza-Trejo, D.R. A Model-Based Strategy for Interturn Short-Circuit Fault Diagnosis in PMSM. IEEE Trans. Ind. Electron. 2017, 64, 7218–7228. [Google Scholar] [CrossRef]
- Jlassi, I.; Estima, J.O.; El Khil, S.K.; Bellaaj, N.M.; Cardoso, A.J.M. A Robust Observer-Based Method for IGBTs and Current Sensors Fault Diagnosis in Voltage-Source Inverters of PMSM Drives. IEEE Trans. Ind. Appl. 2017, 53, 2894–2905. [Google Scholar] [CrossRef]
- Choi, C.; Lee, K.; Lee, W. Observer-based phase-shift fault detection using adaptive threshold for rotor position sensor of permanent-magnet synchronous machine drives in electromechanical brake. IEEE Trans. Ind. Electron. 2015, 62, 1964–1974. [Google Scholar] [CrossRef]
- Zhou, X.; Sun, J.; Cui, P.; Lu, Y.; Lu, M.; Yu, Y. A Fast and Robust Open-Switch Fault Diagnosis Method for Variable-Speed PMSM System. IEEE Trans. Power Electron. 2021, 36, 2598–2610. [Google Scholar] [CrossRef]
- Eissa, M.A.; Darwish, R.R.; Bassiuny, A.M. Design of Observer-Based Fault Detection Structure for Unknown Systems using Input–Output Measurements: Practical Application to BLDC Drive. Power Electron. Drives 2019, 4, 217–226. [Google Scholar] [CrossRef]
- Hou, M.; Shi, H. Stator-Winding Incipient Shorted-Turn Fault Detection for Motor System in Motorized Spindle Using Modified Interval Observers. IEEE Trans. Instrum. Meas. 2021, 70, 3505716. [Google Scholar] [CrossRef]
- Bourogaoui, M.; Jlassi, I.; El Khil, S.K.; Sethom, H.B.A. An effective encoder fault detection in PMSM drives at different speed ranges. In Proceedings of the Proceedings—SDEMPED 2015: IEEE 10th International Symposium on Diagnostics for Electrical Machines, Power Electronics and Drives, Guarda, Portugal, 1–4 September 2015; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2015; pp. 90–96. [Google Scholar] [CrossRef]
- Hermans, F.J.J.; Zarrop, M.B. Sliding Mode Observers for Robust Sensor Monitoring. IFAC Proc. Vol. 1996, 29, 6530–6535. [Google Scholar] [CrossRef]
- He, J.; Zhang, C.; Mao, S.; Wu, H.; Zhao, K. Demagnetization fault detection in permanent magnet synchronous motors based on sliding observer. J. Nonlinear Sci. Appl. 2016, 9, 2039–2048. [Google Scholar] [CrossRef]
- Hashemi, M.; Golkani, M.A.; Watzenig, D. A Robust Approach for Inter-Turn Fault Detection of PMSM Used for Autonomous Vehicles. In Proceedings of the ICCVE 2022—IEEE International Conference on Connected Vehicles and Expo, Lakeland, FL, USA, 7–9 March 2022; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2022. [Google Scholar] [CrossRef]
- Li, H.; Qian, Y.; Asgarpoor, S.; Sharif, H. Machine Current Sensor FDI Strategy in PMSMs. IEEE Access 2019, 7, 158575–158583. [Google Scholar] [CrossRef]
- Bao, L.; Yao, G.; Chen, S.; Wang, Z.; Hu, X.; Huang, Y. An On-line Detection Method for Single-Phase Inter-Turn Fault Occurring in High-Speed PMSM. In Proceedings of the 23rd International Conference on Electrical Machines and Systems, ICEMS, Hamamatsu, Japan, 24–27 November 2020; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2020; pp. 1095–1100. [Google Scholar] [CrossRef]
- Moon, S.; Lee, J.; Jeong, H.; Kim, S.W. Demagnetization Fault Diagnosis of a PMSM Based on Structure Analysis of Motor Inductance. IEEE Trans. Ind. Electron. 2016, 63, 3795–3803. [Google Scholar] [CrossRef]
- Forstner, G.; Kugi, A.; Kemmetmuller, W. Model-based fault identification of inter-turn winding short circuits in PMSM. In Proceedings of the 2020 International Conference on Electrical Machines, ICEM, Gothenburg, Sweden, 23–26 August 2020; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2020; pp. 1390–1396. [Google Scholar] [CrossRef]
- Aminu, K.T.; Jibril, M.M.; Jimoh, A.A.; Mohammed, S.; Jumba, A.G. Fault Detection and Isolation of a Three-tank System Using Analytical Temporal Redundancy—Parity Space/Relation Based Residual Generation. Int. J. Adv. Sci. Res. Eng. 2020, 6, 180–187. [Google Scholar] [CrossRef]
- Xia, X.; Hashemi, E.; Xiong, L.; Khajepour, A. Autonomous Vehicle Kinematics and Dynamics Synthesis for Sideslip Angle Estimation Based on Consensus Kalman Filter. IEEE Trans. Control Syst. Technol. 2023, 31, 179–192. [Google Scholar] [CrossRef]
- Xia, X.; Meng, Z.; Han, X.; Li, H.; Tsukiji, T.; Xu, R.; Zheng, Z.; Ma, J. An automated driving systems data acquisition and analytics platform. Transp. Res. Part C Emerg. Technol. 2023, 151, 104120. [Google Scholar] [CrossRef]
- Dan, L. EKF-based fault detection and isolation for PMSM inverter. Sustain. Energy Technol. Assess. 2022, 52, 101846. [Google Scholar] [CrossRef]
- Namdar, A.; Samet, H.; Allahbakhshi, M.; Tajdinian, M.; Ghanbari, T. A robust stator inter-turn fault detection in induction motor utilizing Kalman filter-based algorithm. Measurement 2022, 187, 110181. [Google Scholar] [CrossRef]
- Prasad, B.J.; Ram, B.V. Inter-turn fault analysis of synchronous generator using finite element method (fem). Int. J. Innov. Technol. Explor. Eng. 2013, 3, 170–176. [Google Scholar]
- Ebrahimi, B.M.; Faiz, J.; Javan-Roshtkhari, M.; Nejhad, A.Z. Static eccentricity fault diagnosis in permanent magnet synchronous motor using time stepping finite element method. IEEE Trans. Magn. 2008, 44, 4297–4300. [Google Scholar] [CrossRef]
- Fitouri, M.; BenSalem, Y.; Abdelkrim, M.N. Analysis and co-simulation of permanent magnet sychronous motor with short-circuit fault by finite element method. In Proceedings of the 13th International Multi-Conference on Systems, Signals and Devices, SSD, Leipzig, Germany, 21–24 March 2016; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2016; pp. 472–477. [Google Scholar] [CrossRef]
- Huang, W.; Luo, L.; Du, J.; Xiang, B.; Mei, S.; Zhou, L.; Fan, Q. Open-Circuit Fault Detection in PMSM Drives Using Model Predictive Control and Cost Function Error. IEEE Trans. Transp. Electrif. 2022, 8, 2667–2675. [Google Scholar] [CrossRef]
- Wang, F.; Li, S.; Mei, X.; Xie, W.; Rodriguez, J.; Kennel, R.M. Model-based predictive direct control strategies for electrical drives: An experimental evaluation of PTC and PCC methods. IEEE Trans. Ind. Inform. 2015, 11, 671–681. [Google Scholar] [CrossRef]
- Hang, J.; Wu, H.; Zhang, J.; Ding, S.; Huang, Y.; Hua, W. Cost Function-Based Open-Phase Fault Diagnosis for PMSM Drive System With Model Predictive Current Control. IEEE Trans. Power Electron. 2021, 36, 2574–2583. [Google Scholar] [CrossRef]
- Huang, W.; Du, J.; Hua, W.; Lu, W.; Bi, K.; Zhu, Y.; Fan, Q. Current-Based Open-Circuit Fault Diagnosis for PMSM Drives With Model Predictive Control. IEEE Trans. Power Electron. 2021, 36, 10695–10704. [Google Scholar] [CrossRef]
- Sahin, I.; Keysan, O. Model Predictive Controller Utilized as an Observer for Inter-Turn Short Circuit Detection in Induction Motors. IEEE Trans. Energy Convers. 2021, 36, 1449–1458. [Google Scholar] [CrossRef]
- Reigosa, D.; Fernández, D.; Park, Y.; Diez, A.B.; Lee, S.B.; Briz, F. Detection of demagnetization in permanent magnet synchronous machines using hall-effect sensors. IEEE Trans. Ind. Appl. 2018, 54, 3338–3349. [Google Scholar] [CrossRef]
- Ebrahimi, B.M.; Faiz, J. Demagnetization fault diagnosis in surface mounted permanent magnet synchronous motors. IEEE Trans. Magn. 2013, 49, 1185–1192. [Google Scholar] [CrossRef]
- Elbouchikhi, E.; Choqueuse, V.; Auger, F.; Benbouzid, M.E.H. Motor current signal analysis based on a matched subspace detector. IEEE Trans. Instrum. Meas. 2017, 66, 3260–3270. [Google Scholar] [CrossRef]
- Alvarez-Gonzalez, F.; Griffo, A.; Wang, B. Permanent magnet synchronous machine stator windings fault detection by Hilbert–Huang transform. J. Eng. 2019, 2019, 3505–3509. [Google Scholar] [CrossRef]
- Yan, R.; Gao, R.X.; Chen, X. Wavelets for fault diagnosis of rotary machines: A review with applications. Signal Process. 2014, 96, 1–15. [Google Scholar] [CrossRef]
- Lei, Y.; Lin, J.; He, Z.; Zuo, M.J. A review on empirical mode decomposition in fault diagnosis of rotating machinery. Mech. Syst. Signal Process. 2013, 35, 108–126. [Google Scholar] [CrossRef]
- Pietrzak, P.; Wolkiewicz, M. Comparison of selected methods for the stator winding condition monitoring of a pmsm using the stator phase currents. Energies 2021, 14, 1630. [Google Scholar] [CrossRef]
- Krichen, M.; Elbouchikhi, E.; Benhadj, N.; Chaieb, M.; Benbouzid, M.; Neji, R. Motor current signature analysis-based permanent magnet synchronous motor demagnetization characterization and detection. Machines 2020, 8, 35. [Google Scholar] [CrossRef]
- Jiang, C.; Liu, H.; Chen, D. A novel fault detection of igbt open—Circuit failure in five-phase open-end winding PMSM drive system. In Proceedings of the 2020 IEEE 1st China International Youth Conference on Electrical Engineering, CIYCEE, Wuhan, China, 1–4 November 2020; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2020. [Google Scholar] [CrossRef]
- Huang, W.; Du, J.; Hua, W.; Fan, Q. An open-circuit fault diagnosis method for PMSM drives using symmetrical and DC components. Chin. J. Electr. Eng. 2021, 7, 124–135. [Google Scholar] [CrossRef]
- El Khil, S.K.; Jlassi, I.; Cardoso, A.J.M.; Estima, J.O.; Mrabet-Bellaaj, N. Diagnosis of Open-Switch and Current Sensor Faults in PMSM Drives Through Stator Current Analysis. IEEE Trans. Ind. Appl. 2019, 55, 5925–5937. [Google Scholar] [CrossRef]
- Goncalves, P.F.C.; Cruz, S.M.A.; Mendes, A.M.S. Open-Phase Fault Diagnosis in Six-Phase PMSM Drives Based on the Harmonics of the Measured Secondary Subspace Currents. In Proceedings of the IECON Proceedings (Industrial Electronics Conference), Singapore, 18–21 October 2020; IEEE Computer Society: Washington, DC, USA, 2020; pp. 4863–4868. [Google Scholar] [CrossRef]
- Wu, X.; Chen, C.-Y.; Chen, T.-F.; Cheng, S.; Mao, Z.-H.; Yu, T.-J.; Li, K. A Fast and Robust Diagnostic Method for Multiple Open-Circuit Faults of Voltage-Source Inverters Through Line Voltage Magnitudes Analysis. IEEE Trans. Power Electron. 2020, 35, 5205–5220. [Google Scholar] [CrossRef]
- Ullah, Z.; Lee, S.T.; Hur, J. A novel fault diagnosis technique for IPMSM using voltage angle. In Proceedings of the 2018 IEEE Energy Conversion Congress and Exposition (ECCE), Portland, OR, USA, 23–27 September 2018; pp. 3236–3243. [Google Scholar]
- Zhang, J.; Xu, Z.; Wang, J.; Zhao, J.; Din, Z.U.; Cheng, M. Detection and Discrimination of Incipient Stator Faults for Inverter-Fed Permanent Magnet Synchronous Machines. IEEE Trans. Ind. Electron. 2021, 68, 7505–7515. [Google Scholar] [CrossRef]
- Xing, M.; Ding, H.; Ren, X.; Wang, T.; Ge, S.; Shen, J. On the Accuracy of Rotor Demagnetization Fault Detection in PMSM Using Vibration-Based Condition Indicators. In Proceedings of the 2021 CAA Symposium on Fault Detection, Supervision, and Safety for Technical Processes, Safeprocess, Chengdu, China, 17–18 December 2021; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2021. [Google Scholar] [CrossRef]
- Fan, W.; Zhou, Q.; Li, J.; Zhu, Z. A Wavelet-Based Statistical Approach for Monitoring and Diagnosis of Compound Faults With Application to Rolling Bearings. IEEE Trans. Autom. Sci. Eng. 2018, 15, 1563–1572. [Google Scholar] [CrossRef]
- Da, Y.; Shi, X.; Krishnamurthy, M. A new approach to fault diagnostics for permanent magnet synchronous machines using electromagnetic signature analysis. IEEE Trans. Power Electron. 2013, 28, 4104–4112. [Google Scholar] [CrossRef]
- Lv, X.; Zheng, X. A Diagnosis Method for Inter-turn Short-circuit Fault of A Nine-phase Permanent Magnet Synchronous Motor Based on Search Coil. In Proceedings of the 2022 International Conference on Electrical Machines and Systems, ICEMS, Chiang Mai, Thailand, 29 November–2 December; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2022. [Google Scholar] [CrossRef]
- Huang, W.; Du, B.; Li, T.; Sun, Y.; Cheng, Y.; Cui, S. Interturn Short-Circuit Fault Diagnosis of Interior Permanent Magnet Synchronous Motor for Electric Vehicle Based on Search Coil. IEEE Trans. Power Electron. 2023, 38, 2506–2515. [Google Scholar] [CrossRef]
- Xiao, L.; Zhang, L.; Yan, Z.; Li, Y.; Su, X.; Song, W. Diagnosis and distinguishment of open-switch and current sensor faults in PMSM drives using improved regularized extreme learning machine. Mech. Syst. Signal Process. 2022, 171, 108866. [Google Scholar] [CrossRef]
- Okada, K.F.A.; de Morais, A.S.; Oliveira-Lopes, L.C.; Ribeiro, L. A survey on fault detection and diagnosis methods. In Proceedings of the 2021 14th IEEE International Conference on Industry Applications, Induscon, São Paulo, Brazil, 15–18 August 2021; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2021; pp. 1422–1429. [Google Scholar] [CrossRef]
- Tang, M.; Zhao, Q.; Wu, H.; Wang, Z.; Meng, C.; Wang, Y. Review and perspectives of machine learning methods for wind turbine fault diagnosis. Front. Energy Res. 2021, 9, 751066. [Google Scholar] [CrossRef]
- Zhou, S.; Ma, C.; Wang, Y.; Wang, D.; He, Y.-L.; Bu, F.; Wang, M. A New Data-Driven Diagnosis Method for Mixed Eccentricity in External Rotor Permanent Magnet Motors. IEEE Trans. Ind. Electron. 2022, 70, 11659–11669. [Google Scholar] [CrossRef]
- Pietrzak, P.; Wolkiewicz, M. Machine Learning-Based Stator Current Data-Driven PMSM Stator Winding Fault Diagnosis. Sensors 2022, 22, 9668. [Google Scholar] [CrossRef]
- Pietrzak, P.; Wolkiewicz, M. On-line detection and classification of pmsm stator winding faults based on stator current symmetrical components analysis and the knn algorithm. Electronics 2021, 10, 1786. [Google Scholar] [CrossRef]
- Liu, R.; Wang, F.; Yang, B.; Qin, S.J. Multiscale Kernel Based Residual Convolutional Neural Network for Motor Fault Diagnosis Under Nonstationary Conditions. IEEE Trans. Ind. Inform. 2020, 16, 3797–3806. [Google Scholar] [CrossRef]
- Maraaba, L.S.; Milhem, A.S.; Nemer, I.A.; Al-Duwaish, H.; Abido, M.A. Convolutional Neural Network-Based Inter-Turn Fault Diagnosis in LSPMSMs. IEEE Access 2020, 8, 81960–81970. [Google Scholar] [CrossRef]
- Skowron, M.; Kowalski, C.T.; Orlowska-Kowalska, T. Impact of the Convolutional Neural Network Structure and Training Parameters on the Effectiveness of the Diagnostic Systems of Modern AC Motor Drives. Energies 2022, 15, 7008. [Google Scholar] [CrossRef]
- Wen, L.; Li, X.; Gao, L.; Zhang, Y. A New Convolutional Neural Network-Based Data-Driven Fault Diagnosis Method. IEEE Trans. Ind. Electron. 2018, 65, 5990–5998. [Google Scholar] [CrossRef]
- Kao, I.-H.; Wang, W.-J.; Lai, Y.-H.; Perng, J.-W. Analysis of Permanent Magnet Synchronous Motor Fault Diagnosis Based on Learning. IEEE Trans. Instrum. Meas. 2019, 68, 310–324. [Google Scholar] [CrossRef]
- Arellano-Espitia, F.; Delgado-Prieto, M.; Martinez-Viol, V.; Saucedo-Dorantes, J.J.; Osornio-Rios, R.A. Deep-learning-based methodology for fault diagnosis in electromechanical systems. Sensors 2020, 20, 3949. [Google Scholar] [CrossRef]
- Lee, H.; Jeong, H.; Koo, G.; Ban, J.; Kim, S.W. Attention Recurrent Neural Network-Based Severity Estimation Method for Interturn Short-Circuit Fault in Permanent Magnet Synchronous Machines. IEEE Trans. Ind. Electron. 2021, 68, 3445–3453. [Google Scholar] [CrossRef]
- Yan, H.; Xu, Y.; Cai, F.; Zhang, H.; Zhao, W.; Gerada, C. PWM-VSI Fault Diagnosis for a PMSM Drive Based on the Fuzzy Logic Approach. IEEE Trans. Power Electron. 2018, 34, 759–768. [Google Scholar] [CrossRef]
- Hang, J.; Shu, X.; Ding, S.; Huang, Y. Robust Open-Circuit Fault Diagnosis for PMSM Drives Using Wavelet Convolutional Neural Network with Small Samples of Normalized Current Vector Trajectory Graph. IEEE Trans. Ind. Electron. 2023, 70, 7653–7663. [Google Scholar] [CrossRef]
- Pietrzak, P.; Wolkiewicz, M. Demagnetization Fault Diagnosis of Permanent Magnet Synchronous Motors Based on Stator Current Signal Processing and Machine Learning Algorithms. Sensors 2023, 23, 1757. [Google Scholar] [CrossRef]
- Skowron, M.; Orlowska-Kowalska, T.; Kowalski, C.T. Detection of Permanent Magnet Damage of PMSM Drive Based on Direct Analysis of the Stator Phase Currents Using Convolutional Neural Network. IEEE Trans. Ind. Electron. 2022, 69, 13665–13675. [Google Scholar] [CrossRef]
- Huang, F.; Zhang, X.; Qin, G.; Xie, J.; Peng, J.; Huang, S.; Long, Z.; Tang, Y. Demagnetization Fault Diagnosis of Permanent Magnet Synchronous Motors Using Magnetic Leakage Signals. IEEE Trans. Ind. Inform. 2022, 19, 6105–6116. [Google Scholar] [CrossRef]
- Chang, L.-K.; Wang, S.-H.; Tsai, M.-C. Demagnetization fault diagnosis of a PMSM using auto-encoder and k-means clustering. Energies 2020, 13, 4467. [Google Scholar] [CrossRef]
- Shih, K.-J.; Hsieh, M.-F.; Chen, B.-J.; Huang, S.-F. Machine Learning for Inter-Turn Short-Circuit Fault Diagnosis in Permanent Magnet Synchronous Motors. IEEE Trans. Magn. 2022, 58, 8204307. [Google Scholar] [CrossRef]
- Skowron, M.; Orlowska-Kowalska, T.; Kowalski, C.T. Application of simplified convolutional neural networks for initial stator winding fault detection of the PMSM drive using different raw signal data. IET Electr. Power Appl. 2021, 15, 932–946. [Google Scholar] [CrossRef]
- Pietrzak, P.; Wolkiewicz, M.; Orlowska-Kowalska, T. PMSM Stator Winding Fault Detection and Classification Based on Bispectrum Analysis and Convolutional Neural Network. IEEE Trans. Ind. Electron. 2022, 70, 5192–5202. [Google Scholar] [CrossRef]
- Kashyap, K.S.; Kumar, N.P.; Balakrishnan, P. Application of Machine Learning for Analysis of Static Eccentricity Fault in IPMSM using Finite Element Method. In Proceedings of the 2021 National Power Electronics Conference, NPEC, Bhubaneswar, India, 15–17 December 2021; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2021. [Google Scholar] [CrossRef]
- Chen, Z.; Tian, S.; Shi, X.; Lu, H. Multiscale Shared Learning for Fault Diagnosis of Rotating Machinery in Transportation Infrastructures. IEEE Trans. Ind. Inform. 2023, 19, 447–458. [Google Scholar] [CrossRef]
- Dalvand, F.; Dalvand, S.; Sharafi, F.; Pecht, M. Current Noise Cancellation for Bearing Fault Diagnosis Using Time Shifting. IEEE Trans. Ind. Electron. 2017, 64, 8138–8147. [Google Scholar] [CrossRef]
- Goyal, D.; Choudhary, A.; Pabla, B.S.; Dhami, S.S. Support vector machines based non-contact fault diagnosis system for bearings. J. Intell. Manuf. 2020, 31, 1275–1289. [Google Scholar] [CrossRef]
- Toma, R.N.; Piltan, F.; Im, K.; Shon, D.; Yoon, T.H.; Yoo, D.-S.; Kim, J.-M. A Bearing Fault Classification Framework Based on Image Encoding Techniques and a Convolutional Neural Network under Different Operating Conditions. Sensors 2022, 22, 4881. [Google Scholar] [CrossRef]
- Jankowska, K.; Dybkowski, M. Design and Analysis of Current Sensor Fault Detection Mechanisms for PMSM Drives Based on Neural Networks. Designs 2022, 6, 18. [Google Scholar] [CrossRef]
- Jankowska, K.; Dybkowski, M. Experimental Analysis of the Current Sensor Fault Detection Mechanism Based on Neural Networks in the PMSM Drive System. Electronics 2023, 12, 1170. [Google Scholar] [CrossRef]
- Du, Y.; Member, S.; Li, C.; Zheng, Z.; Member, S. An Online Metric Learning-Based Open-Switch and Current Sensor Fault Diagnosis for Multi-Sector PMSM Systems. IEEE Trans. Power Electron. 2023, 38, 8966–8976. [Google Scholar] [CrossRef]
- Tomasov, M.; Kajanova, M.; Bracinik, P.; Motyka, D. Overview of battery models for sustainable power and transport applications. Transp. Res. Procedia 2019, 40, 548–555. [Google Scholar] [CrossRef]
- Dey, S.; Biron, Z.A.; Tatipamula, S.; Das, N.; Mohon, S.; Ayalew, B.; Pisu, P. On-board thermal fault diagnosis of lithium-ion batteries for hybrid electric vehicle application. IFAC-PapersOnLine 2015, 48, 389–394. [Google Scholar] [CrossRef]
- Dey, S.; Perez, H.E.; Moura, S.J. Model-Based Battery Thermal Fault Diagnostics: Algorithms, Analysis, and Experiments. IEEE Trans. Control. Syst. Technol. 2019, 27, 576–587. [Google Scholar] [CrossRef]
- Yao, L.; Fang, Z.; Xiao, Y.; Hou, J.; Fu, Z. An Intelligent Fault Diagnosis Method for Lithium Battery Systems Based on Grid Search Support Vector Machine. Energy 2020, 214, 118866. [Google Scholar] [CrossRef]
- Cheng, Y.; D’Arpino, M.; Rizzoni, G. Fault Diagnosis in Lithium-ion Battery of Hybrid Electric Aircraft based on Structural Analysis. In Proceedings of the 2022 IEEE Transportation Electrification Conference and Expo, ITEC, Anaheim, CA, USA, 15–17 June 2022; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2022; pp. 997–1004. [Google Scholar] [CrossRef]
- Xiong, R.; Yang, R.; Chen, Z.; Shen, W.; Sun, F. Online Fault Diagnosis of External Short Circuit for Lithium-Ion Battery Pack. IEEE Trans. Ind. Electron. 2020, 67, 1081–1091. [Google Scholar] [CrossRef]
- Liu, Z.; He, H. Model-based sensor fault diagnosis of a lithium-ion battery in electric vehicles. Energies 2015, 8, 6509–6527. [Google Scholar] [CrossRef]
- Xiong, R.; Yu, Q.; Shen, W.; Lin, C.; Sun, F. A Sensor Fault Diagnosis Method for a Lithium-Ion Battery Pack in Electric Vehicles. IEEE Trans. Power Electron. 2019, 34, 9709–9718. [Google Scholar] [CrossRef]
- Lai, X.; Yi, W.; Kong, X.; Han, X.; Zhou, L.; Sun, T.; Zheng, Y. Online detection of early stage internal short circuits in series-connected lithium-ion battery packs based on state-of-charge correlation. J. Energy Storage 2020, 30, 101514. [Google Scholar] [CrossRef]
- Yang, R.; Xiong, R.; Shen, W. On-board diagnosis of soft short circuit fault in lithium-ion battery packs for electric vehicles using an extended Kalman filter. CSEE J. Power Energy Syst. 2022, 8, 258–270. [Google Scholar] [CrossRef]
- Zhang, K.; Hu, X.; Liu, Y.; Lin, X.; Liu, W. Multi-fault detection and isolation for lithium-ion battery systems. IEEE Trans. Power Electron. 2022, 37, 971–989. [Google Scholar] [CrossRef]
- Jiang, J.; Cong, X.; Li, S.; Zhang, C.; Zhang, W.; Jiang, Y. A Hybrid Signal-Based Fault Diagnosis Method for Lithium-Ion Batteries in Electric Vehicles. IEEE Access 2021, 9, 19175–19186. [Google Scholar] [CrossRef]
- Li, X.; Dai, K.; Wang, Z.; Han, W. Lithium-ion batteries fault diagnostic for electric vehicles using sample entropy analysis method. J. Energy Storage 2020, 27, 101121. [Google Scholar] [CrossRef]
- Cai, T.; Mohtat, P.; Stefanopoulou, A.G.; Siegel, J.B. Li-ion battery fault detection in large packs using force and gas sensors. IFAC-PapersOnLine 2020, 53, 12491–12496. [Google Scholar] [CrossRef]
- Yao, L.; Xiao, Y.; Gong, X.; Hou, J.; Chen, X. A novel intelligent method for fault diagnosis of electric vehicle battery system based on wavelet neural network. J. Power Source 2020, 453, 227870. [Google Scholar] [CrossRef]
- Li, D.; Liu, P.; Zhang, Z.; Zhang, L.; Deng, J.; Wang, Z.; Dorrell, D.G.; Li, W.; Sauer, D.U. Battery Thermal Runaway Fault Prognosis in Electric Vehicles Based on Abnormal Heat Generation and Deep Learning Algorithms. IEEE Trans. Power Electron. 2022, 37, 8513–8525. [Google Scholar] [CrossRef]
- Li, D.; Zhang, Z.; Liu, P.; Wang, Z.; Zhang, L. Battery Fault Diagnosis for Electric Vehicles Based on Voltage Abnormality by Combining the Long Short-Term Memory Neural Network and the Equivalent Circuit Model. IEEE Trans. Power Electron. 2021, 36, 1303–1315. [Google Scholar] [CrossRef]
- Wang, J.; Zhang, S.; Hu, X. A Fault Diagnosis Method for Lithium-Ion Battery Packs Using Improved RBF Neural Network. Front. Energy Res. 2021, 9, 702139. [Google Scholar] [CrossRef]
- Deng, F.; Bian, Y.; Zheng, H. Fault diagnosis for electric vehicle lithium batteries using a multi-classification support vector machine. Electr. Eng. 2022, 104, 1831–1837. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Basis | Features |
|---|---|---|
| Model-based | Using the system model and the estimated parameters for fault detection | Very effective and reliable for simple systems Low cost and fast detection Modelling complex systems is difficult Uncertainties affect the model Sensitive to load and parameters variations Prior knowledge and model are needed |
| Signal-based | Using output signal and signal-processing methods for fault detection | Easy implementation Suitable for complex systems Slow detection speed or high cost for faster detection methods due to the need for extra hardware |
| Data-driven | Using historical data for training the system and fault detection | No prior knowledge needed No system model or signal pattern needed Suitable for complex systems Generalization capability High accuracy, even for incipient fault detection Quality and quantity of the historical data can affect FDD performance |
| Method | Fault Index | Fault(s) | Features | Ref. |
|---|---|---|---|---|
| Voltage observer | voltage | Open circuit | No extra hardware needed | [54] |
| Stator flux linkage DC-offset observer | Flux linkage | Stator faults | High accuracy Low computational complexity Suitable for real-time FDD | [57] |
| Current observer | current | ITSF | Stationary and transient condition High accuracy and low false alarm | [58] |
| Luenberger Observer | current | Open switch Current sensor fault | Adaptive threshold Stationary and transient condition Robust to machine parameter and load variations High accuracy and low false alarm | [46] |
| Current observer | current | Open switch | Adaptive threshold Stationary and transient condition Robust to machine parameter and load variations Fast detection High accuracy | [61] |
| Luenberger observer | Current | Encoder fault | Different speed range | [64] |
| Sliding mode observer | Flux | Demagnetization | Operating condition independent Suitable for real-time FDD | [66] |
| Sliding mode observer | Resistance | ITSF | Locating and estimating fault severity | [67] |
| Parameter estimation | Current | Current sensor fault | Multiple sensor fault detection Robust to motor imbalance | [68] |
| Parameter estimation + Machine learning | Resistance Inductance Voltage | ITSF | Combine model-based and machine learning for fault detection | [69] |
| Parameter estimation | Flux linkage | Demagnetization | Flux linkage estimation based on the varying inductance to improve reliability | [70] |
| Parameter estimation | Current Voltage Rotor angle | ITSF | Locating and estimating fault severity | [71] |
| EKF | Resistance | Open switch | Fault detection and isolation | [75] |
| FEA | Reactance | ITSC | Incipient fault detection High computational cost | [77] |
| FEA + ANN | Current Torque | Eccentricity | Robust to noise | [78] |
| MPC | Current | Open switch | Fast detection Single and multiple switch fault detection Robust to the motor parameter and operation condition | [80] |
| MPC | Current | Open phase | Robust against operation point and parameter variations Simple implementation | [81] |
| MPC | current | Open switch | Fast detection Robust against operation point Detection of 21 combinations of open-switch fault in 3-phase inverters | [82] |
| MPC | Voltage | ITSF | Low computational load | [83] |
| Method | Fault Index | Fault(s) | Features | Ref. |
|---|---|---|---|---|
| FEM + MCSA + FFT | Current | Partial demagnetization | Early fault detection Cost-effective High computational load Not suitable for uniform demagnetization | [91] |
| ZSC | Current | Open switch | Fast detection | [92] |
| Symmetrical components | Current | Open switch | Fast detection Multiple open-switch fault detection | [93] |
| Normalized average | Current | Open switch Current sensor fault | Better rapidity Cost-effective Robust to false alarms Detection and isolation of 27 open circuit faults Stationary and non-stationary conditions | [94] |
| Secondary subspace analysis | Current | Open phase | Independent of motor parameters and operating condition | [95] |
| Magnitude analysis | Voltage | Open switch | Very fast detection Robust to various control methods and false alarms | [96] |
| Voltage angle analysis | Voltage | ITSF Demagnetization Eccentricity | No extra hardware needed Multi-fault detection | [97] |
| ZSVC + High-frequency signal injection | Voltage | ITSF Resistive unbalance fault | Robust to speed and load variations | [98] |
| FFT + Chebyshev’s inequity + Machine learning | vibration | Demagnetization | Severity estimation High accuracy | [99] |
| DSW | Vibration | Bearing fault | Not suitable for detecting bearing fault type | [100] |
| FEA + Search coil | Magnetic flux Induced voltage | ITSF | Fast and accurate Early-stage fault detection | [102] |
| Search coil + NSVC | Induced voltage | ITSF | Reduced cost Robust to speed and load Stationary and non-stationary conditions | [104] |
| Using Hall-effect field sensor | Magnetic flux | Eccentricity Demagnetization | Robust to motor design and operating condition | [32] |
| Method | Fault Index | Feature Extraction Method | Faults | Features | Ref |
|---|---|---|---|---|---|
| Hybrid SVM & 2D-CNN | Current (iq) Voltage (vq) | ITSF | Very high accuracy Fewer samples for SVM Combining Model-based and data-driven | [124] | |
| Fuzzy logic | Current | Open switch | Single, multiple and intermittent fault detection and locating Robust to load variation Relatively slow detection with two fundamental periods for fault detection | [118] | |
| WCNN | Current | Open-switch | A small sample set needed | [119] | |
| 1D CNN | Current | Demagnetization Bearing fault | Can detect demagnetization, partial demagnetization and bearing fault with an accuracy of 98.8% at various speeds | [115] | |
| KNN & MLP | Current | STFT | Demagnetization | Simple structure Fast detection and training Very high accuracy | [120] |
| CNN | Current | Demagnetization | Incipient fault detection Detection during simultaneous ITSF fault Very fast detection and high accuracy Steady-state and transient condition applicable | [121] | |
| SSDRB | Magnetic leakage | WSCN | Demagnetization | High accuracy Few labelled data needed | [122] |
| Autoencoder & K-means | Current Voltage Speed Power Torque | Demagnetization | High accuracy Severity estimation No additional sensor | [123] | |
| CNN | Current | Bispectrum analysis | ITSF | High accuracy Low training time due to adding a pre-processing stage, but lower detection speed | [126] |
| CNN | Axial flux | ITSF | Simple structure with high accuracy Robust no operating condition Very fast detection | [125] | |
| RNN | Current Rotational speed | ITSF | ITSF severity estimation Incipient fault detection Applicable for different operating conditions | [117] |
| Method | Fault Index | Feature Extraction Method | Faults | Features | Ref |
|---|---|---|---|---|---|
| BPNN + AM | EMF | FFT | Mixed eccentricity | Highly accurate Generalization capability Offline fault detection | [108] |
| KNN + FEA | Current | FFT | Static eccentricity | High accuracy Incipient fault detection | [127] |
| MLP RBF SOM | Vibration | FFT HHT | Bearing fault | Reaching 100% accuracy Cheap processor and easy implementation | [30] |
| 2D CNN | Current | Bearing faults | Accuracy of more than 99% Low computational time | [129] | |
| MK-ResCNN | Vibration | Rotor faults | Non-stationary condition fault detection Multiple rotor fault detection | [111] | |
| MSSLN | Vibration | Bearing fault | Non-stationary operation and varying conditions fault detection High accuracy | [128] | |
| SVM | Vibration | DWT | Bearing fault | Low cost non-contact vibration sensor | [130] |
| CNN | Speed | Bearing fault | No extra sensor Low cost High accuracy Fast | [31] |
| Method | Fault Index | Feature Extraction Method | Faults | Features | Ref |
|---|---|---|---|---|---|
| NN | Speed Current | Current sensor fault | Fast detection Accurate Low computational effort | [132] | |
| Metric Learning | Current | Current sensor fault Open switch | Fast detection Robustness Low computational effort | [134] | |
| MLP NN | Current | Current sensor fault | Fast detection High accuracy Stationary and non-stationary state | [133] |
| Method | Fault Index | Faults | Features | Ref | |
|---|---|---|---|---|---|
| Model-based | PDE observer | Temperature | Thermal faults | Robust and effective Simple | [137] |
| Structural analysis | current | Short circuit | Detecting both internal and external short circuit | [139] | |
| ECM | voltage | External short circuit | Online, fast and accurate detection Generalization capability | [140] | |
| ECM and EKF | voltage | Sensor fault | Simple | [141] | |
| Parameter estimation | SOC | Sensor fault | Simple and efficient | [142] | |
| EKF | SOC | Internal short circuit | Online, fast and accurate detection | [143] | |
| EKF and entropy | Voltage | Sensor faults Short circuit Connection faults | Online, comprehensive fault detection | [145] | |
| Signal-based | Sample Entropy and EMD | Voltage | Detecting and locating various faults High accuracy | [147] | |
| Gas and force sensor | Gas Force | Internal short circuit | Fast and simple | [148] | |
| Data-driven | SVM | Voltage | Voltage fault | High accuracy Severity estimation | [138] |
| GRNN | voltage | Voltage fault | High accuracy Estimating fault severity and location | [149] | |
| LSTN-RNN | voltage | Battery failure Thermal runaway | Highly precise Online fault detection Fast Trained based on real-world data | [151] | |
| RBF-NN | Voltage Current Temperature | Battery faults | 100% accuracy | [152] | |
| MC-SVM | Current Voltage Temperature Discharging Capacity | Over/under-voltage Overheating Low capacity | A small training data set High accuracy | [153] | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Khaneghah, M.Z.; Alzayed, M.; Chaoui, H. Fault Detection and Diagnosis of the Electric Motor Drive and Battery System of Electric Vehicles. Machines 2023, 11, 713. https://doi.org/10.3390/machines11070713
Khaneghah MZ, Alzayed M, Chaoui H. Fault Detection and Diagnosis of the Electric Motor Drive and Battery System of Electric Vehicles. Machines. 2023; 11(7):713. https://doi.org/10.3390/machines11070713
Chicago/Turabian StyleKhaneghah, Mohammad Zamani, Mohamad Alzayed, and Hicham Chaoui. 2023. "Fault Detection and Diagnosis of the Electric Motor Drive and Battery System of Electric Vehicles" Machines 11, no. 7: 713. https://doi.org/10.3390/machines11070713
APA StyleKhaneghah, M. Z., Alzayed, M., & Chaoui, H. (2023). Fault Detection and Diagnosis of the Electric Motor Drive and Battery System of Electric Vehicles. Machines, 11(7), 713. https://doi.org/10.3390/machines11070713