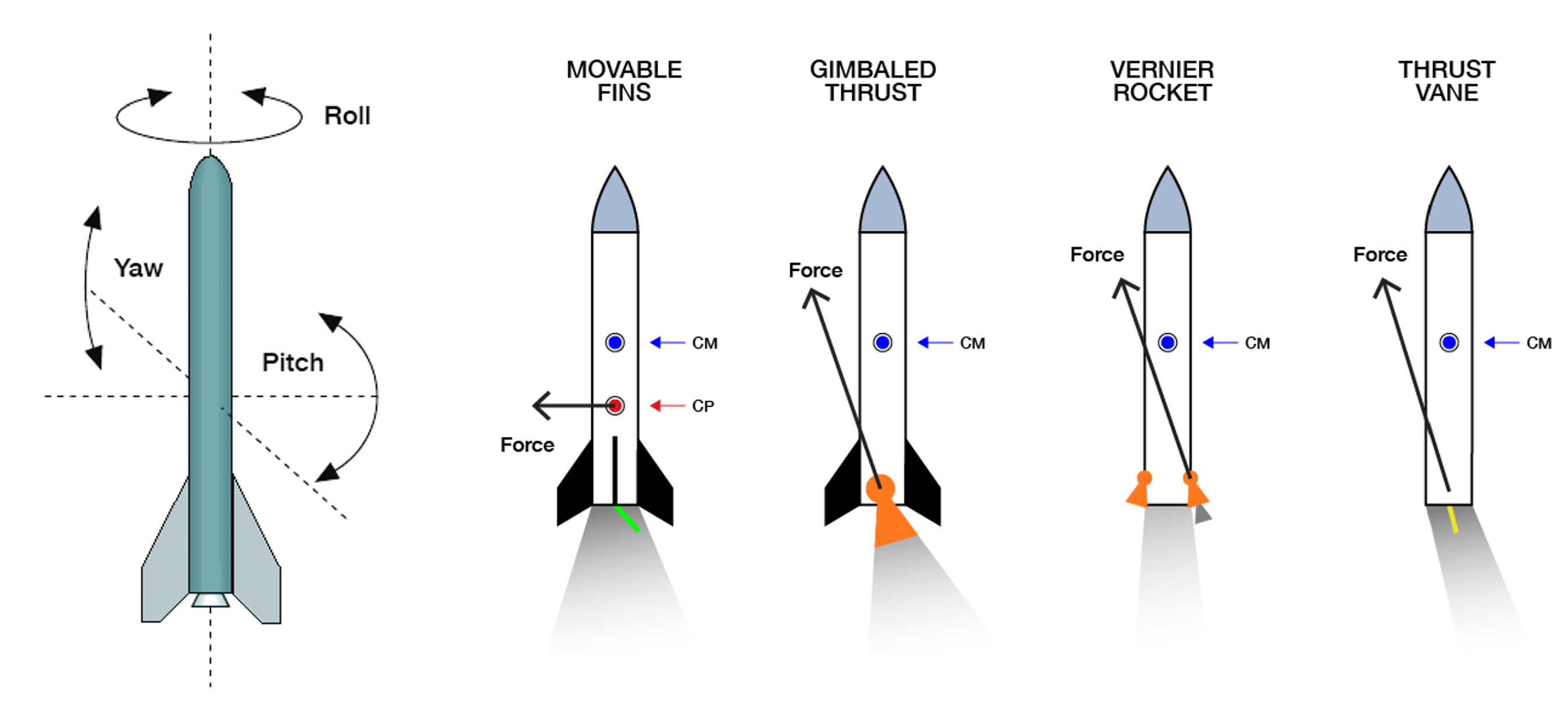
From the stability point of view, rockets are divided into two main categories: finned rockets and finless rockets [
1]. Their flight dynamic is directly influenced by the fins, since during the flight phases the drag in the rear of the fuselage increases, causing the rocket’s center of pressure
cp to move behind the rocket’s center of gravity
cg (
Figure 3) and, in turn, to correct both the angle of attack
, defined in the yaw-roll plane as the angle between the rocket flight direction and the rocket longitudinal axis, and the sideslip angle
, the corresponding
angle in the pitch–roll plane.
Fins act as a passive guidance system, allowing the rocket to orient and be more stable during flight. As a main drawback, fins increase both the rocket mass and the fluttering phenomena at high speed flight. In contrast, finless rockets are unstable by nature because of the inverted position of the cp and the cg, with the cp well ahead of the cg. Moreover, the fuel reduction during the propelled phases causes the cg to move back further, leading to an increase of both the deviation angles and and the aerodynamic disturbance torques, increasing the instability of the rocket. For these reasons, active guidance control is crucial to counteract the drag force in a finless rocket.
3.2. Rocket Model
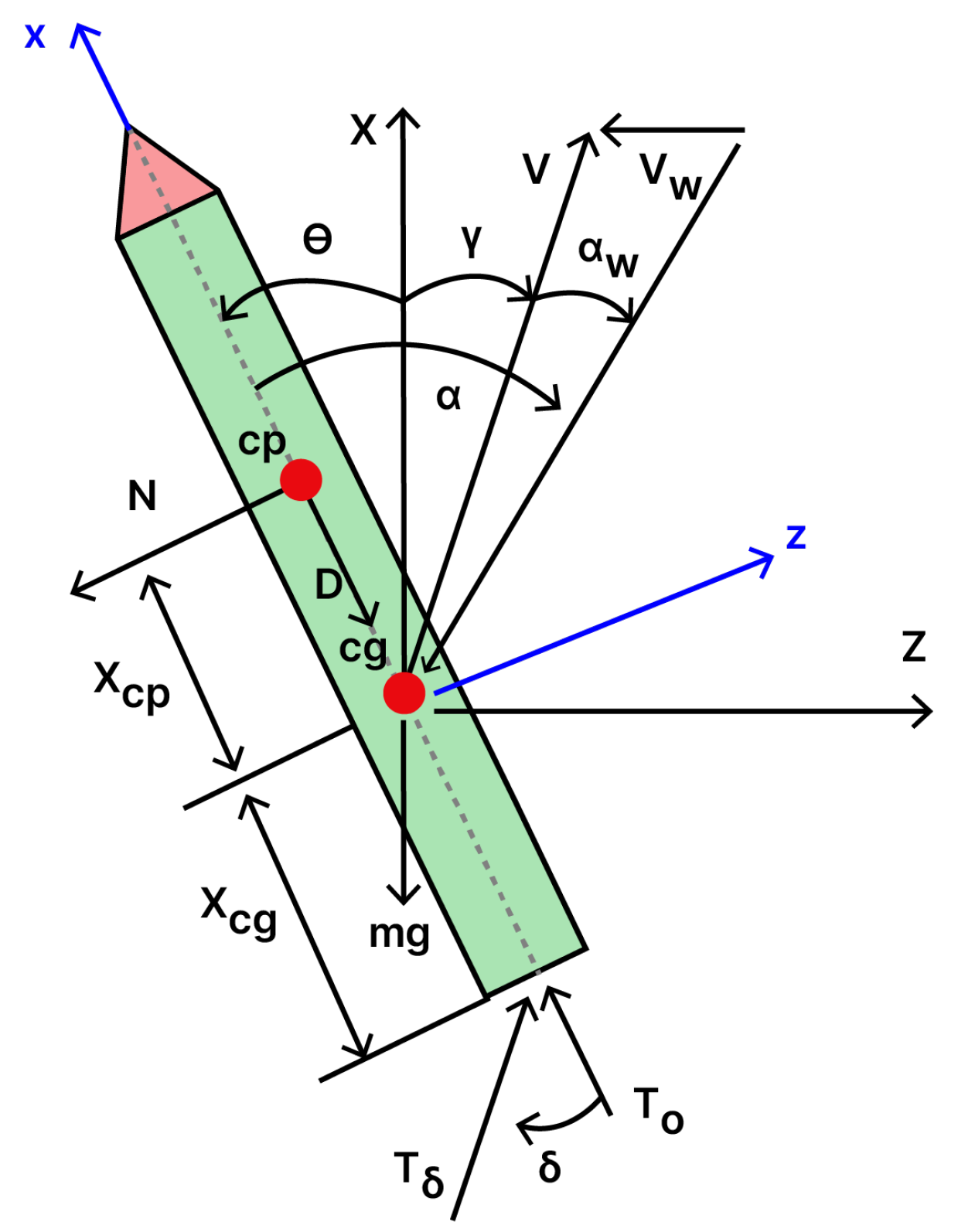
A simplified model of a finless launcher was adopted (
Figure 4), [
2]. The reported values were derived from the rocket reference trajectory [
4], assuming the operating point was at altitude h = 10 Km, 60 s after take-off, and Mach number M = 1.4 (
Table 1). Both the inertial reference frame (
X, Y, Z) and the body-fixed axes (
x, y, z) are centered around the rocket
cg.
is the pitch moment of inertia;
is the gimballed control thrust, while
is the ungimballed thrust aligned to the body axis
x;
F =
+
is the total thrust force;
V is the vehicle velocity,
the aerodynamic force and
,
the aerodynamic derivatives that are expressed as
is the known input gimbal angle, = + + is the effective angle of attack, with the pitch angle and = being the flight path drift angle. The acting aerodynamic forces are the drag , the lift force N applied at the cp, the inertial drift velocity and the wind disturbance velocity, according to the wind-induced angle of attack ( = /V).
The drift velocity caused by the wind is added to the velocity along the
Z-axis acting during the ascent phase, leading to a lateral motion of the rocket and a consequent deviation from its nominal trajectory. To guarantee effective control after take-off, the controller needs to adjust the position of the launcher acting against the wind to maintain a drift rate as close to
as possible. Starting from the rocket dynamic, the equations of motion linearized at the operating point with small angular deflections are given by:
Combining Equations (2)–(4), the resulting state–space model is:
Equation (
6) is the output vector, with the pitch angle as the single measured output; the feed-forward matrix
D is 0 since the system input does not directly affect the system output. The actuator deflection
is the input of the system together with
. The wind-induced angle of attack is the system’s unknown input, and it has to be estimated.
3.3. Stability Analysis
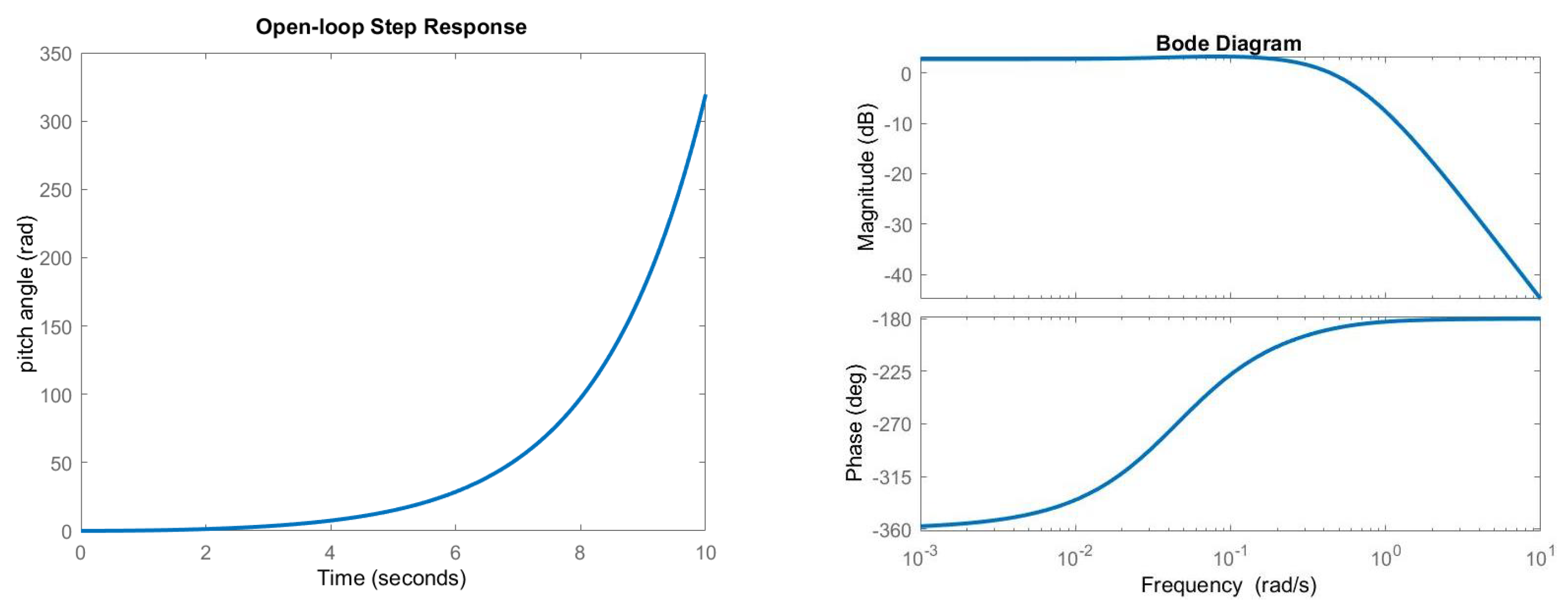
As described above, finless rockets are inherently unstable, and, thus, they require attitude stabilization. The unstable behavior is demonstrated considering the flight dynamics of the rocket along its trajectory without active control of the plant (
Figure 5).
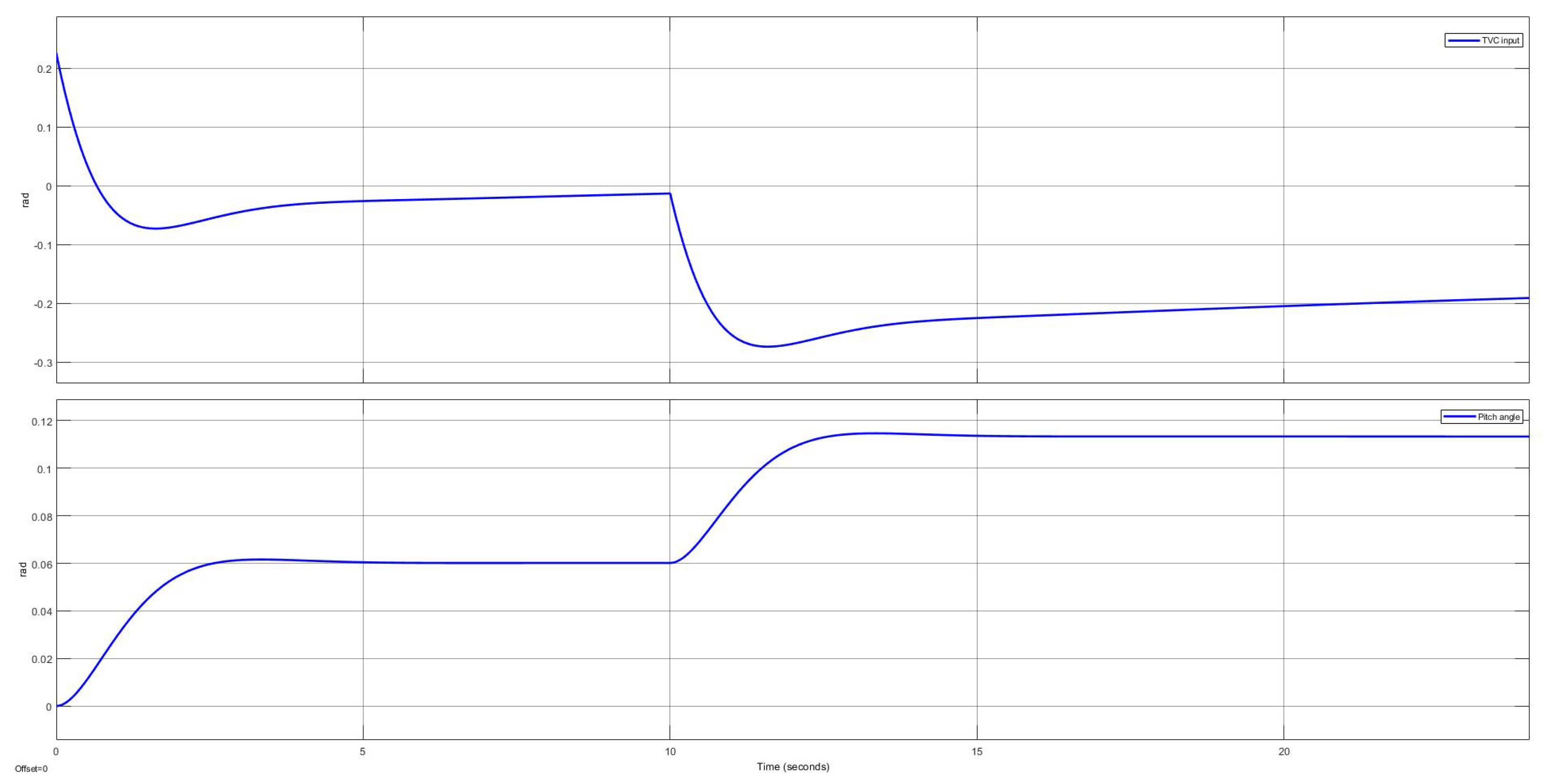
The measured output
increases progressively with time causing a strong deviation of the rocket from its nominal path, suggesting the instability of the plant when the system is perturbed with the input gimbal angle. Looking at the eigenvalues of the plant further validates the rocket instability because of the one negative real root:
Another method used to obtain a measurement of the stability of the system is based on the analysis of the bode plots of the open−loop transfer function. As shown in
Figure 5, the gain margin is negative, as well as the phase margin, confirming the system is unstable. For effective control of the launcher, the control capability of the thrust vector must counteract the aerodynamic loads acting on the launcher, given by:
>
. The control moment of the thrust must be larger than the aerodynamic moment, dealing with a maximum allowable gimbal angle
(
) of the TVC actuator. Besides this, the maximum admissible angle of attack
has an impact on the flight conditions, limiting the launch windows in which the rocket can safely fly through its trajectory without encountering irreversibly unstable dynamics.
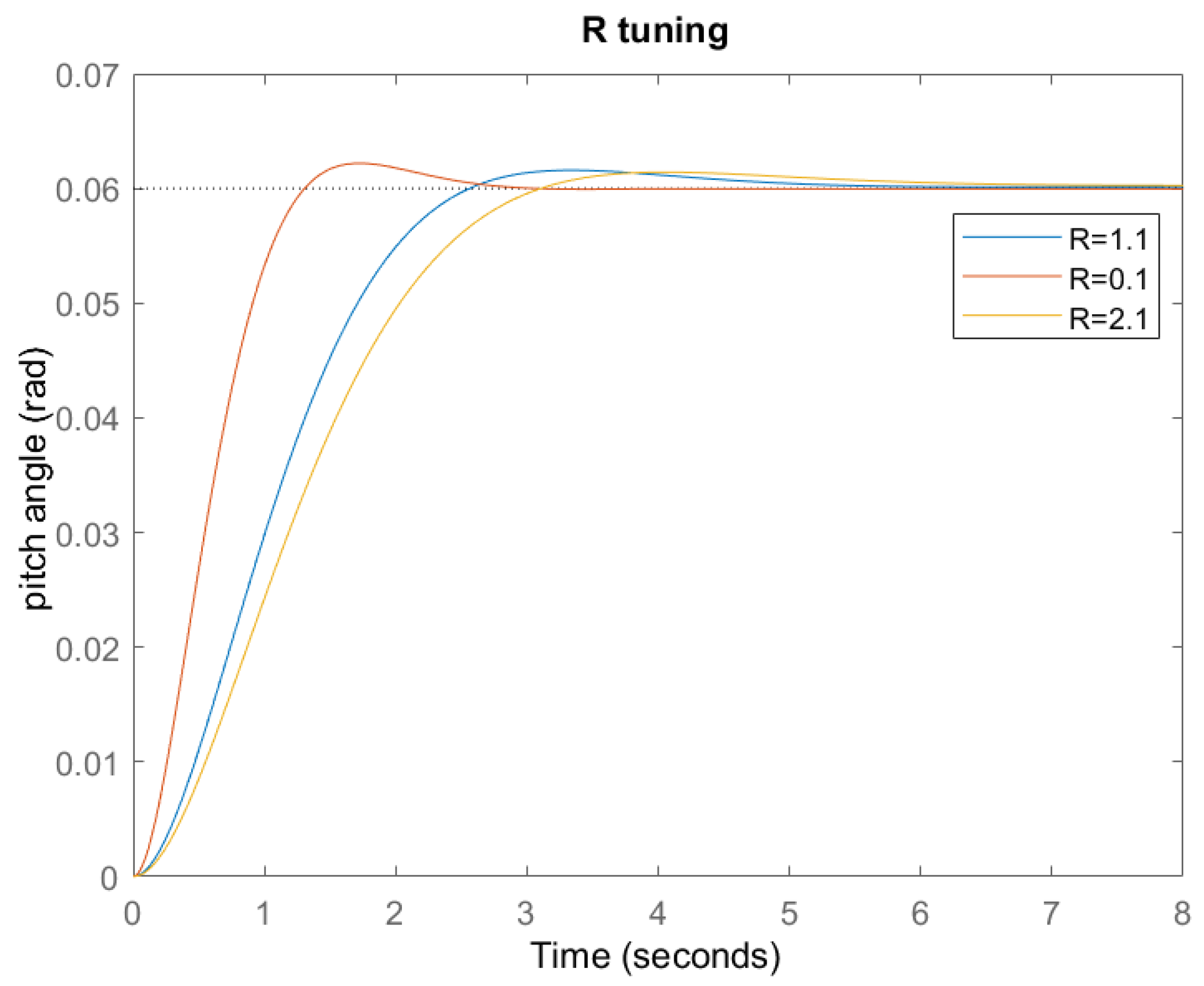
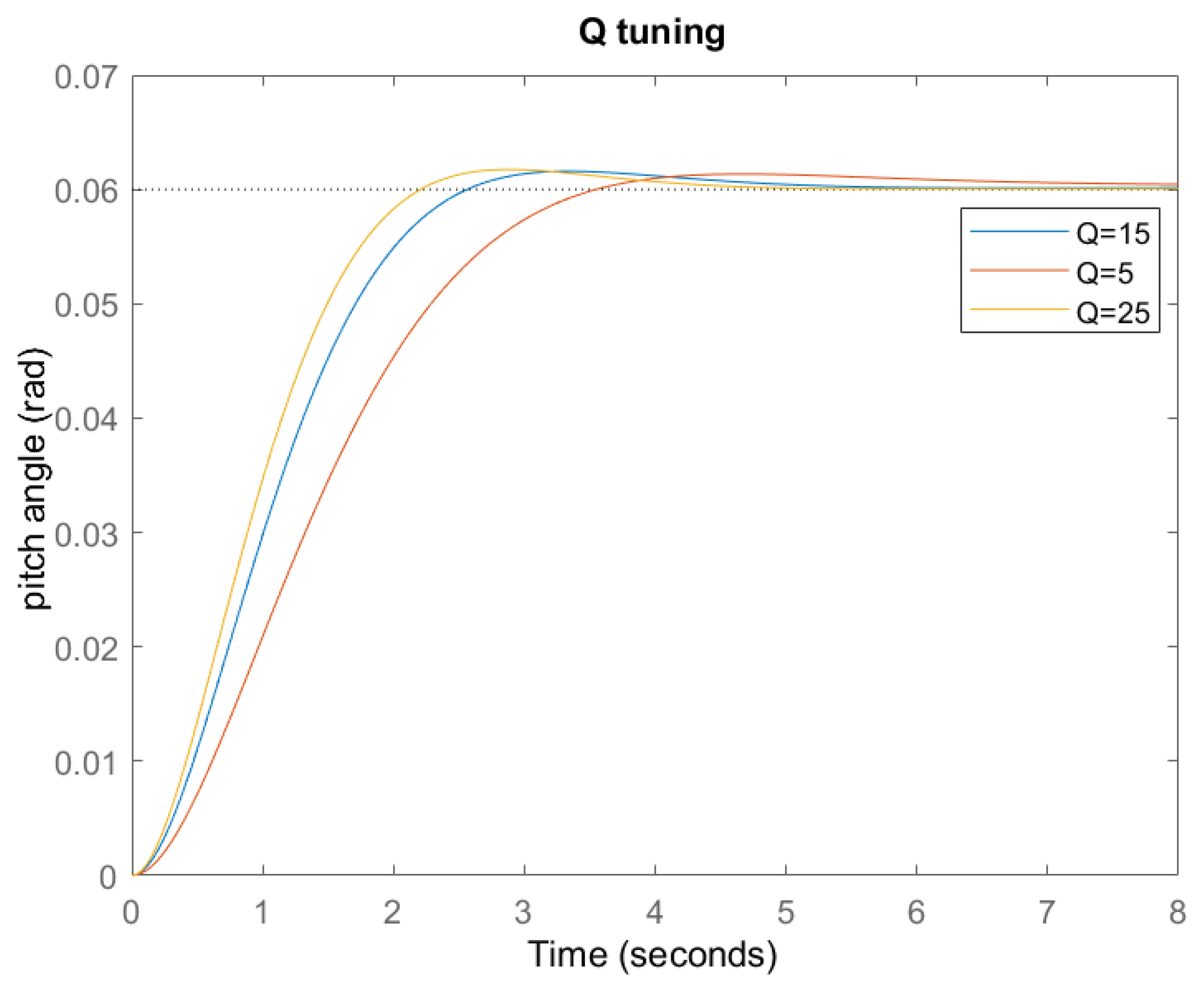
3.4. Controller Design
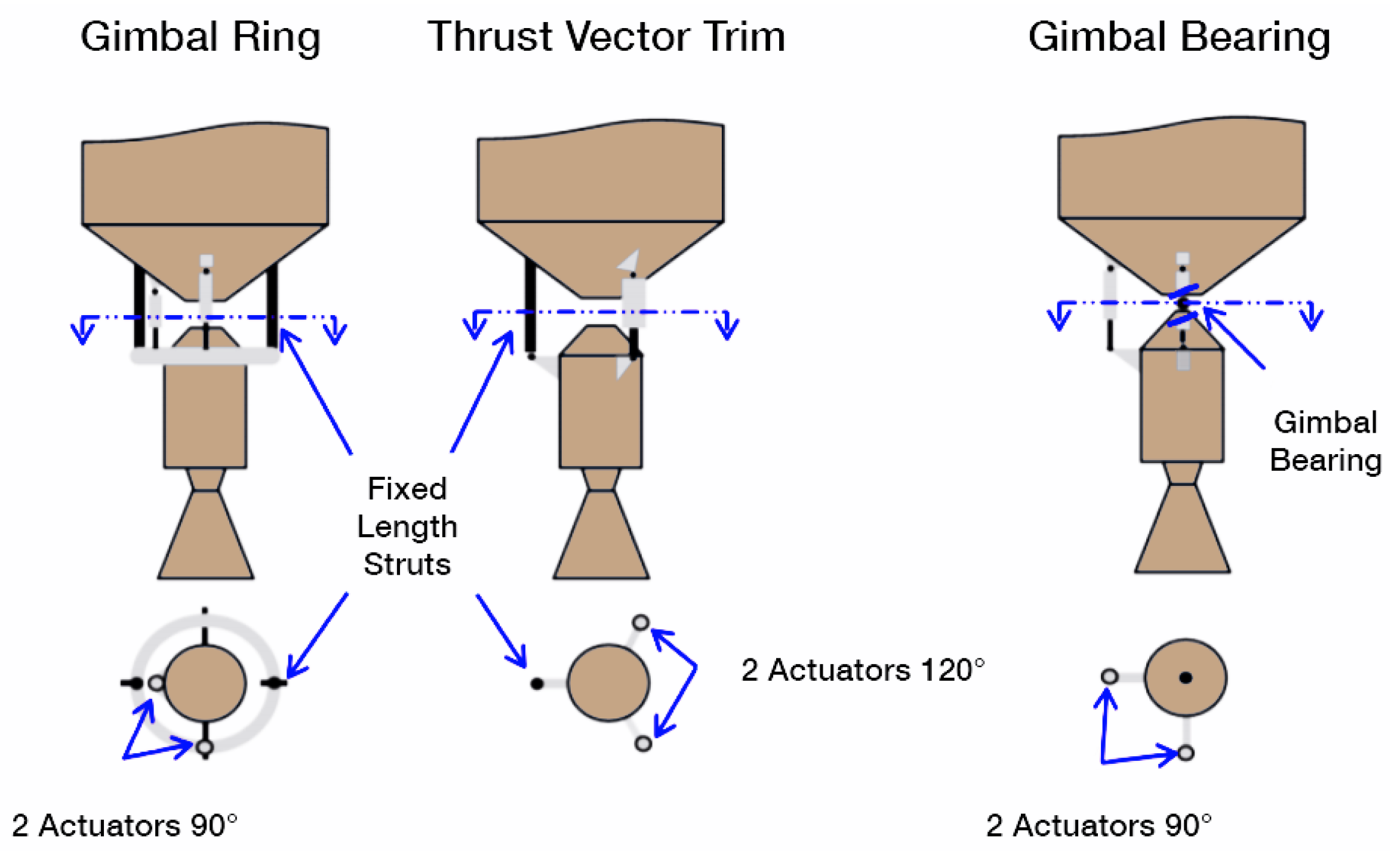
The implementation of the TVC system is given by the command signals forwarded to the servo actuation system through the autopilot. Indeed, the autopilot performs precise nozzle deflection by commanding the rocket actuators and, in turn, the gimbal of the nozzle. The actuators’ gimballing generates the pitch moment and torque around the rocket cg, allowing for the control of both rocket attitude () and angular velocity (). The deflection of the nozzle is generally measured by position sensors and its measurement is available as a feedback signal. The rocket considered in this study is equipped with a single motor, so the thrust vectoring allows the control of the motion in the pitch–yaw angle without any effect on the roll motion. The analysis considers the pitch angle as the only measured system output.
The design requirements for the implementation of the controller [
9] are the following:
Overshoot < 10%
Settling time < 10 s
Rise time < 2 s
Steady-state error < 2%



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}