


Potential Field Control of a Redundant Nonholonomic Mobile Manipulator with Corridor-Constrained Base Motion



Abstract
1. Introduction
2. Problem Specification
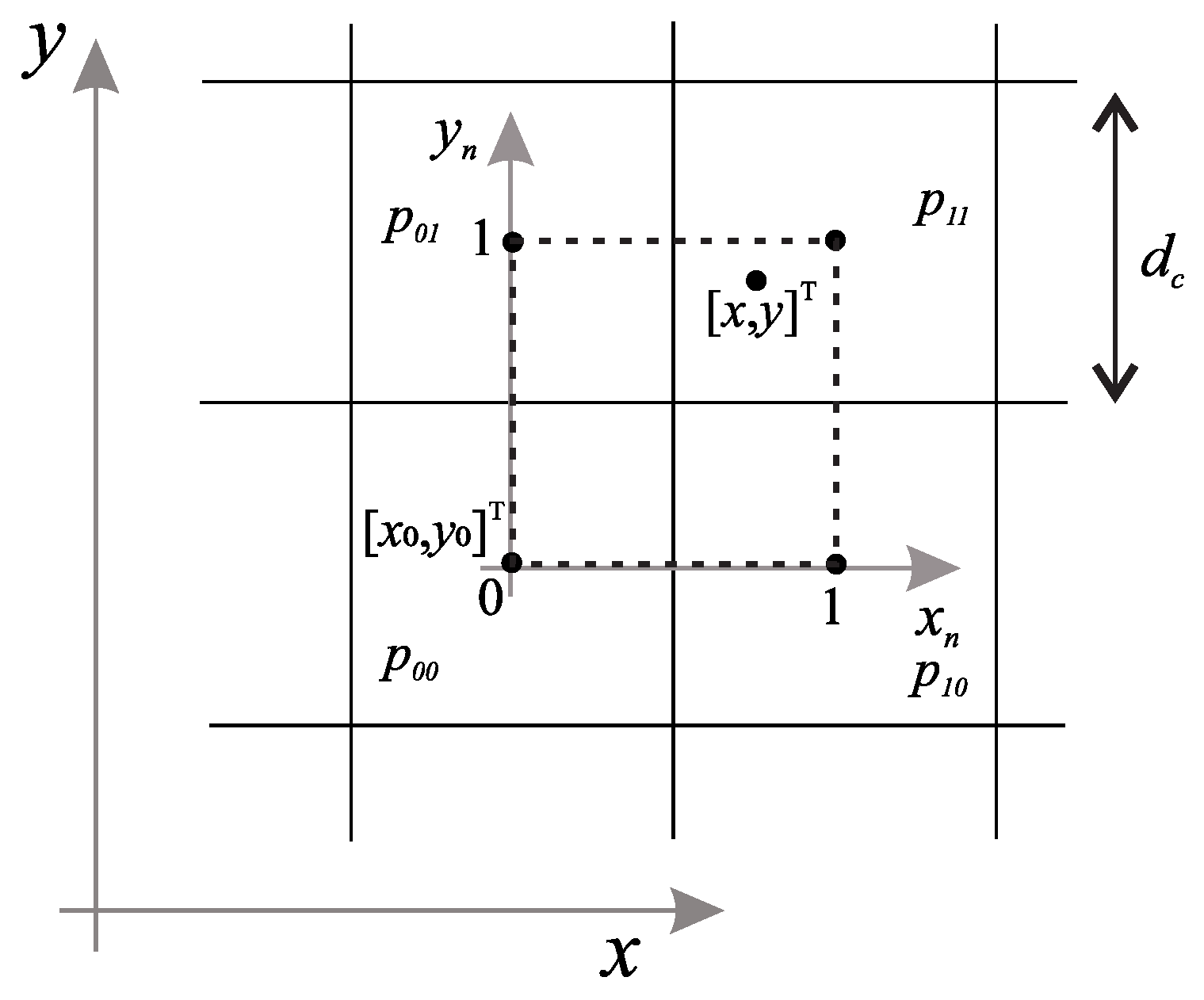
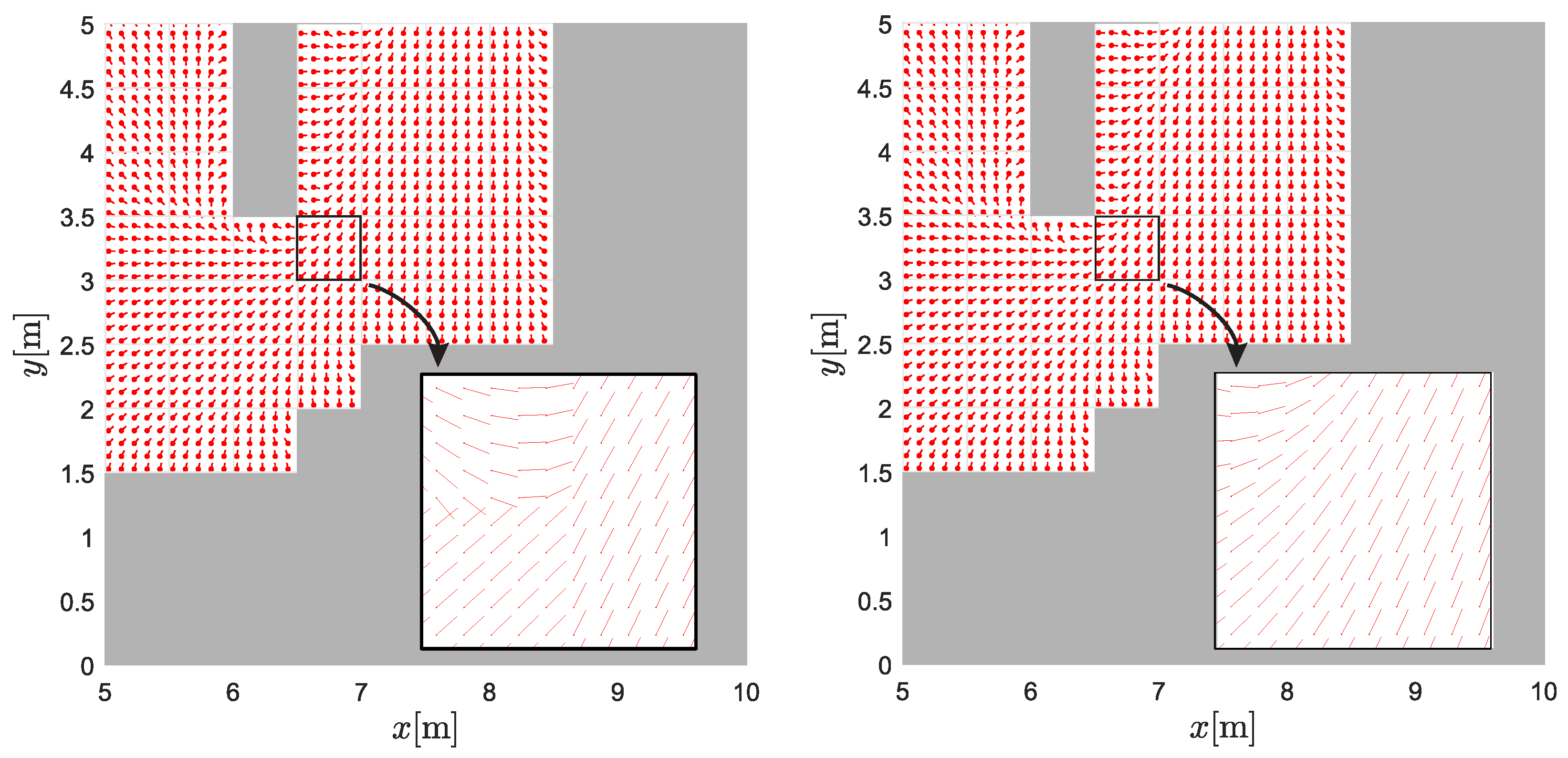
3. Navigation Function for Corridor-Constrained Motion
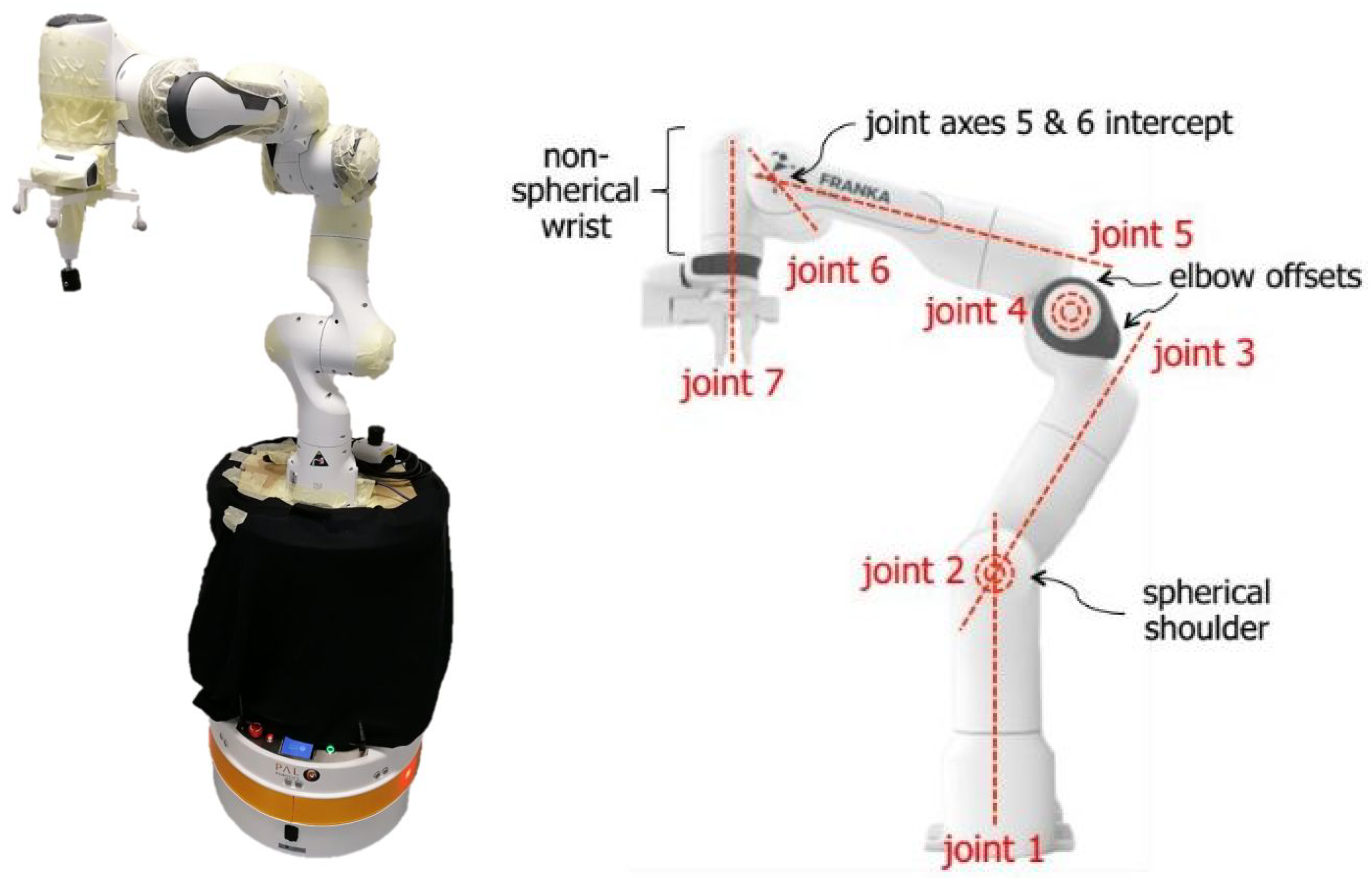
4. Mobile Manipulator Model
4.1. System Model
4.2. Velocity Kinematic Model
5. Inverse Kinematic in Velocity Space
5.1. Controller for the End Effector of the Mobile Manipulator
5.2. Secondary Task and Objective Function
5.3. Mobile Base Corridor-Constrained Control
6. Simulation Analysis and Validation
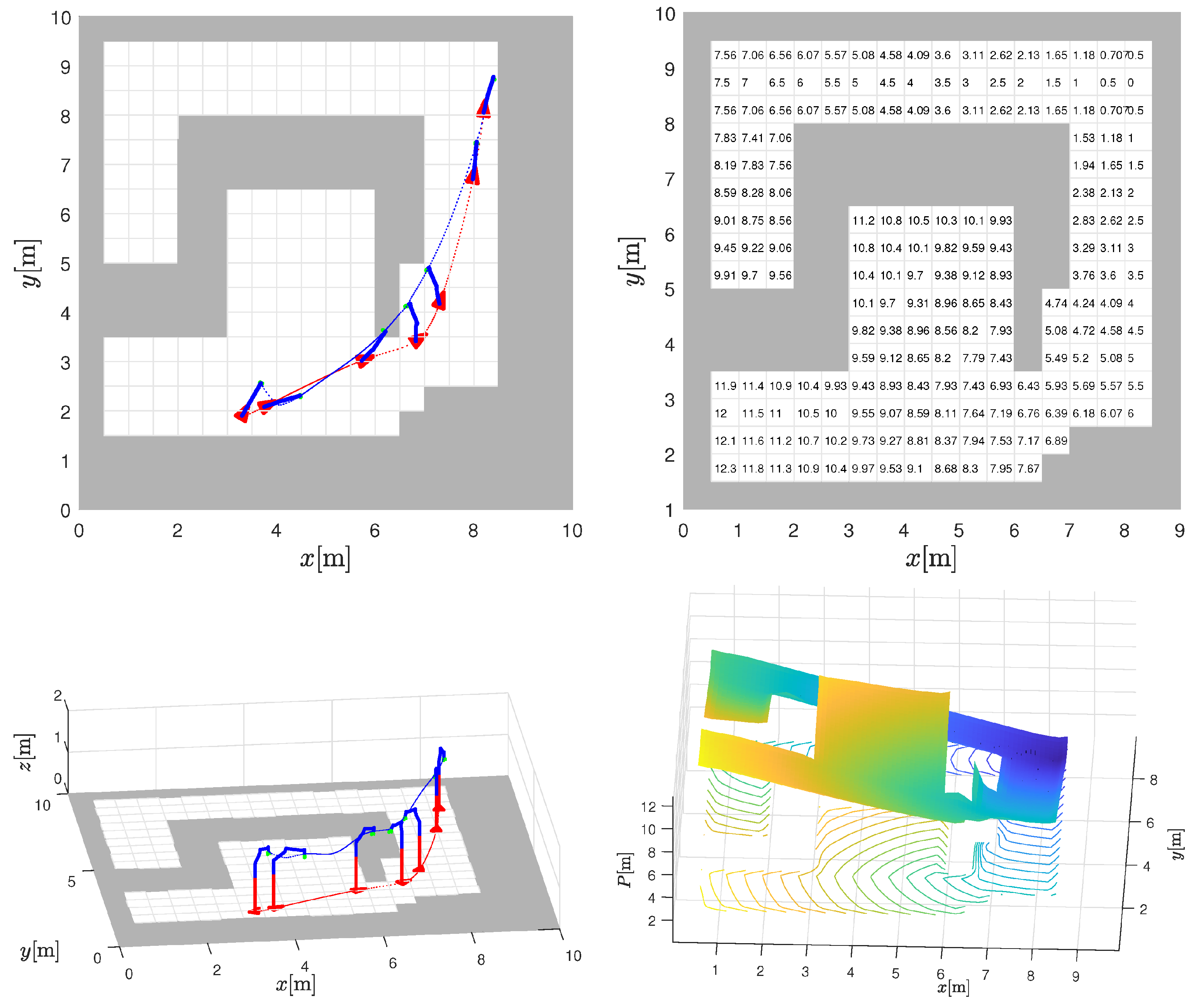
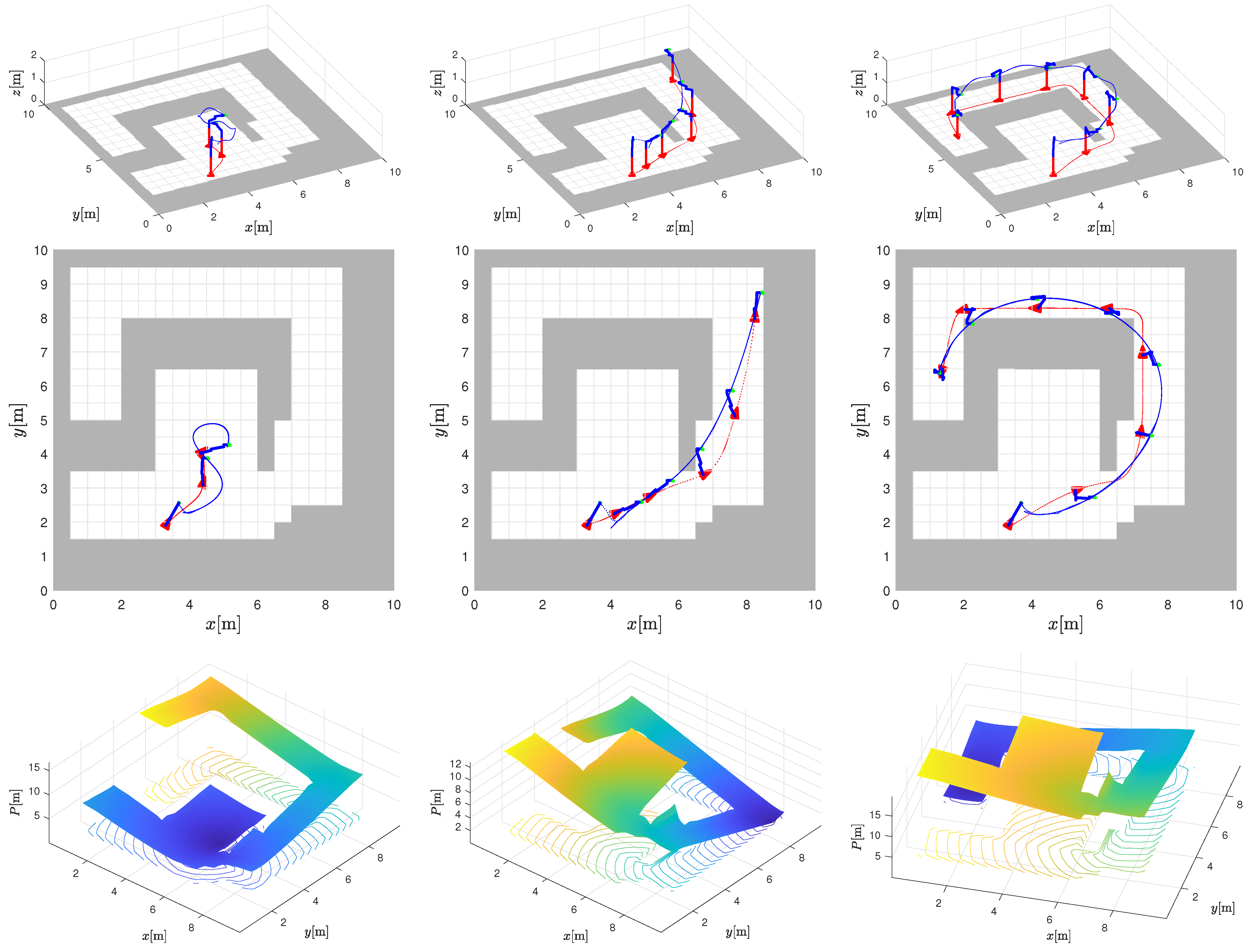
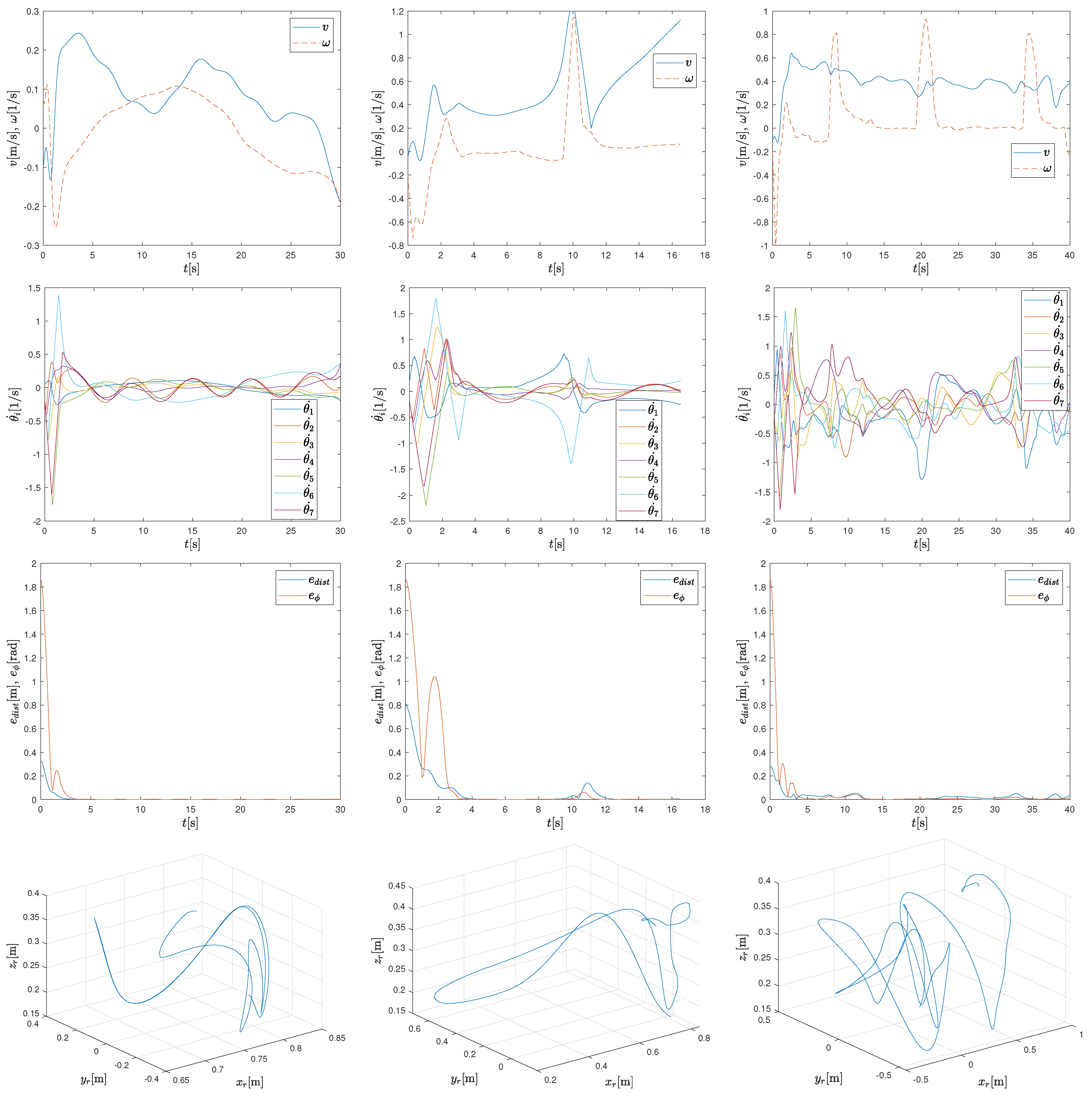
6.1. Joint Arm Trajectory Tracking and Base Potential Field Navigation
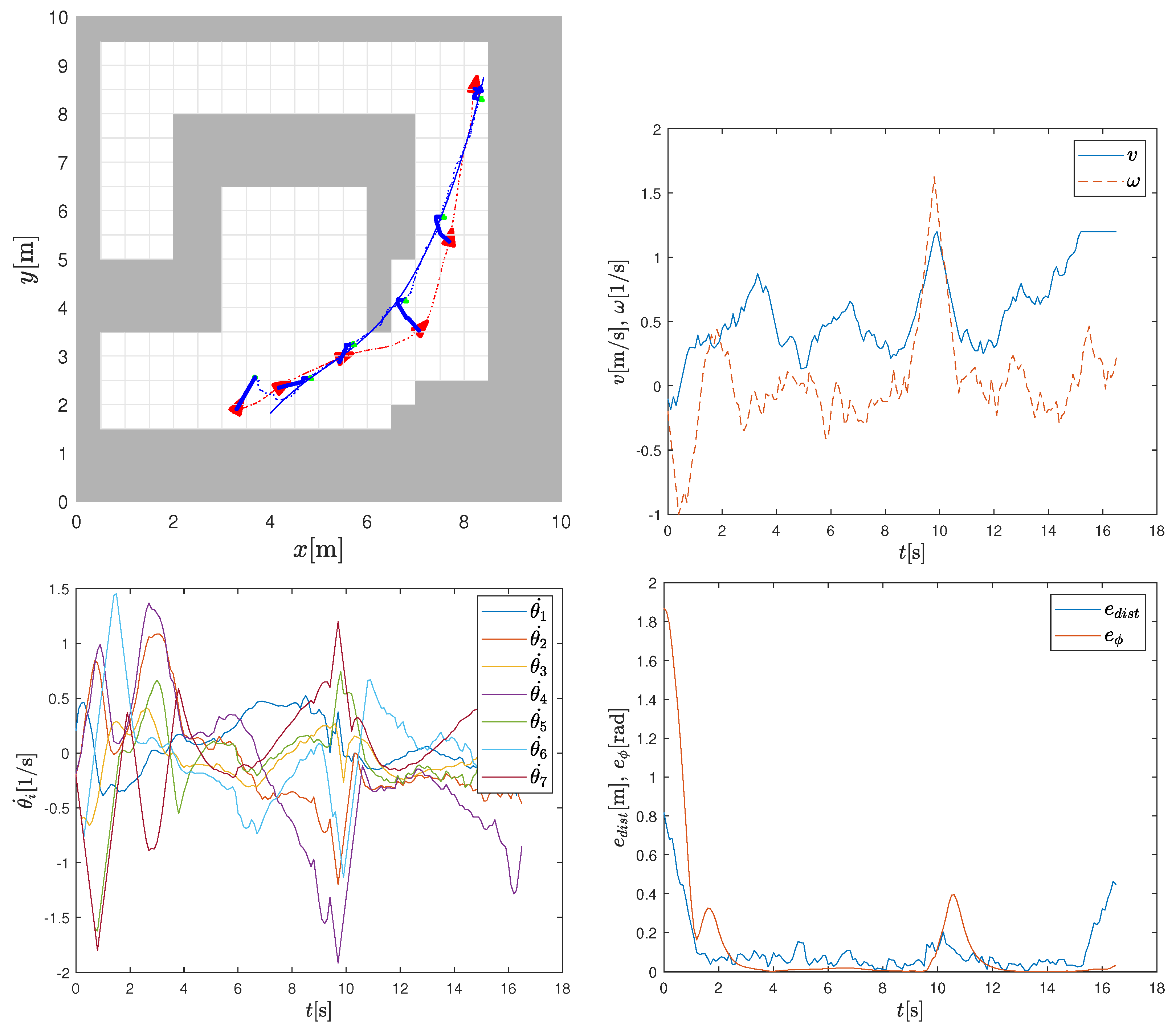
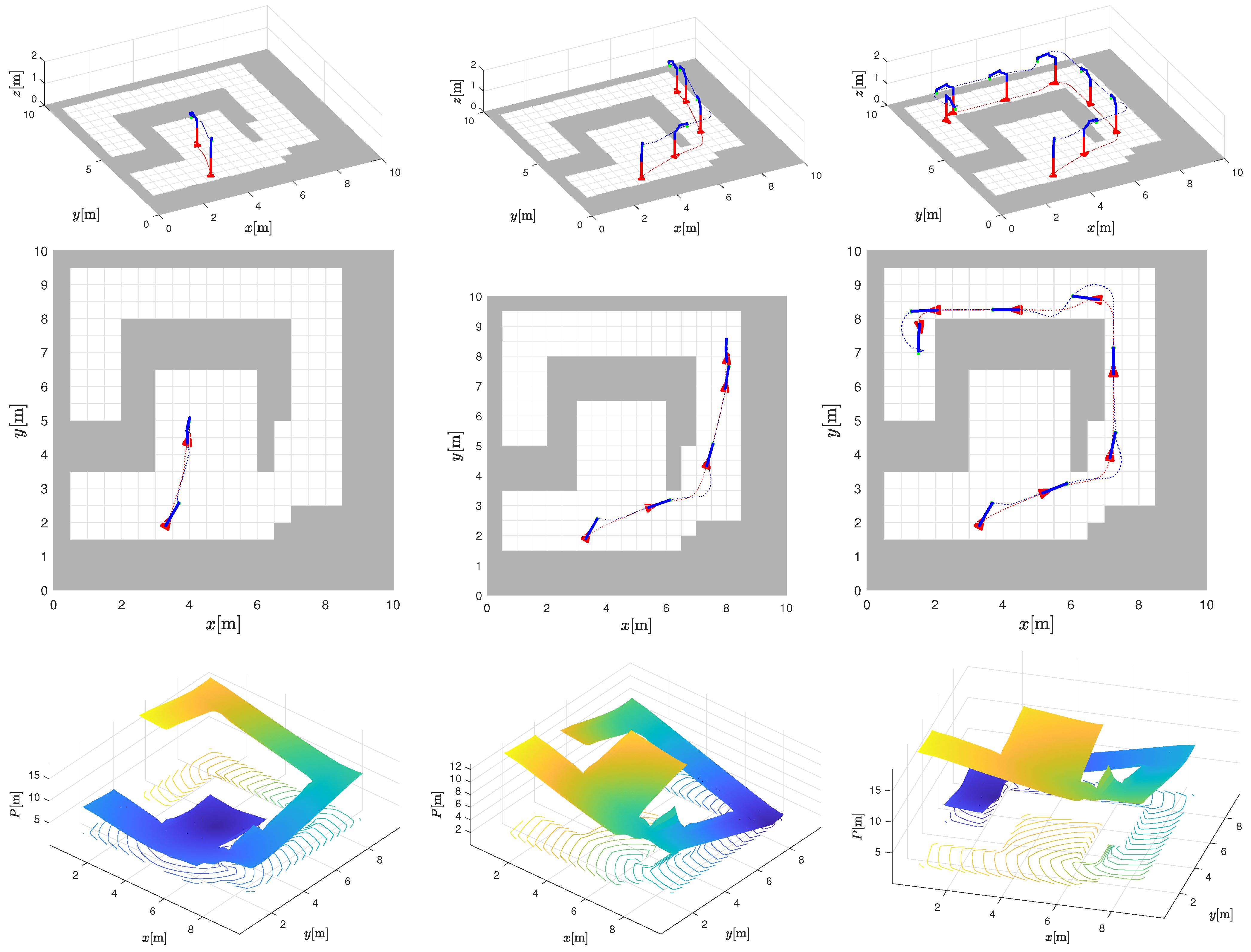
6.2. Joint Arm Pose Control and Base Potential Field Navigation
7. Discussion
8. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Householder, A.S. Unitary Triangularization of a Nonsymmetric Matrix. J. ACM 1958, 5, 339–342. [Google Scholar] [CrossRef]
- Ghosal, A. Resolution of redundancy in robots and in a human arm. Mech. Mach. Theory 2018, 125, 126–136. [Google Scholar] [CrossRef]
- Nakamura, Y. Advanced Robotics: Redundancy and Optimization, 1st ed.; Addison-Wesley Longman Publishing Co., Inc.: Boston, MA, USA, 1990. [Google Scholar]
- Bayle, B.; Renaud, M.; Fourquet, J.Y. Nonholonomic Mobile Manipulators: Kinematics, Velocities and Redundancies. J. Intell. Robot. Syst. 2003, 36, 45–63. [Google Scholar] [CrossRef]
- Sandakalum, T.; Ang, M.H. Motion Planning for Mobile Manipulators—A Systematic Review. Machines 2022, 10, 97. [Google Scholar] [CrossRef]
- Jeong, H.; Kim, H.; Cheong, J.; Kim, W. Virtual Joint Method for Kinematic Modeling of Wheeled Mobile Manipulators. Int. J. Control Autom. Syst. 2014, 12, 1059–1069. [Google Scholar] [CrossRef]
- Ancona, R. Redundancy modelling and resolution for robotic mobile manipulators: A general approach. Adv. Robot. 2017, 31, 706–715. [Google Scholar] [CrossRef]
- Khan, A.H.; Li, S.; Chen, D.; Liao, L. Tracking control of redundant mobile manipulator: An RNN based metaheuristic approach. Neurocomputing 2020, 400, 272–284. [Google Scholar] [CrossRef]
- Ram, R.; Pathak, P.; Junco, S. Trajectory control of a mobile manipulator in the presence of base disturbance. Simulation 2019, 95, 529–543. [Google Scholar] [CrossRef]
- Sorour, M.; Cherubini, A.; Fraisse, P. Motion Control for Steerable Wheeled Mobile Manipulation. In Proceedings of the 2019 European Conference on Mobile Robots (ECMR), Prague, Czech Republic, 4–6 September 2019; pp. 1–7. [Google Scholar] [CrossRef]
- Ram, R.; Pathak, P.; Junco, S. Inverse kinematics of mobile manipulator using bidirectional particle swarm optimization by manipulator decoupling. Mech. Mach. Theory 2019, 131, 385–405. [Google Scholar] [CrossRef]
- Shyh Chyan, G.; Ponnambalam, S. Obstacle avoidance control of redundant robots using variants of particle swarm optimization. Robot. Comput. Integr. Manuf. 2012, 28, 147–153. [Google Scholar] [CrossRef]
- Tian, L.; Collins, C. An effective robot trajectory planning method using a genetic algorithm. Mechatronics 2004, 14, 455–470. [Google Scholar] [CrossRef]
- Xiao, H.; Li, Z.; Yang, C.; Zhang, L.; Yuan, P.; Ding, L.; Wang, T. Robust Stabilization of a Wheeled Mobile Robot Using Model Predictive Control Based on Neurodynamics Optimization. IEEE Trans. Ind. Electron. 2017, 64, 505–516. [Google Scholar] [CrossRef]
- Spahn, M.; Brito, B.; Alonso-Mora, J. Coupled Mobile Manipulation via Trajectory Optimization with Free Space Decomposition. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–5 June 2021; pp. 12759–12765. [Google Scholar] [CrossRef]
- Brahmi, A.; Saad, M.; Gauthier, G.; Zhu, W.H.; Ghommam, J. Adaptive Control of Mobile Manipulator Robot based on Virtual Decomposition Approach. In Proceedings of the 13th International Conference on Informatics in Control, Automation and Robotics, Lisbon, Portugal, 29–31 July 2016; pp. 254–261. [Google Scholar] [CrossRef]
- Mailah, M.; Pitowarno, E.; Jamaluddin, H. Robust Motion Control for Mobile Manipulator Using Resolved Acceleration and Proportional-Integral Active Force Control. Int. J. Adv. Robot. Syst. 2005, 2, 14. [Google Scholar] [CrossRef]
- Connell, D.; Manh La, H. Extended rapidly exploring random tree–based dynamic path planning and replanning for mobile robots. Int. J. Adv. Robot. Syst. 2018, 15, 1729881418773874. [Google Scholar] [CrossRef]
- Castaman, N.; Pagello, E.; Menegatti, E.; Pretto, A. Receding Horizon Task and Motion Planning in Changing Environments. Robot. Auton. Syst. 2021, 145, 103863. [Google Scholar] [CrossRef]
- Sereinig, M.; Werth, W.; Faller, L.M. A review of the challenges in mobile manipulation: Systems design and RoboCup challenges. Elektrotechnik Informationstechnik 2020, 137, 1–12. [Google Scholar] [CrossRef]
- Chu, B. Modeling of a Mobile Manipulator for Redundancy Resolution. In Proceedings of the 29th ISARC, Eindhoven, The Netherlands, 26–29 June 2012. [Google Scholar] [CrossRef]
- Mashali, M.; Alqasemi, R.; Dubey, R. Task priority based dual-trajectory control for redundant mobile manipulators. In Proceedings of the 2014 IEEE International Conference on Robotics and Biomimetics (ROBIO 2014), Bali, Indonesia, 5–10 December 2014; pp. 1457–1462. [Google Scholar] [CrossRef]
- Mashali, M.; Wu, L.; Alqasemi, R.; Dubey, R. Controlling a Non-Holonomic Mobile Manipulator in a Constrained Floor Space. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, 21–25 May 2018; pp. 725–731. [Google Scholar] [CrossRef]
- Mazur, A.; Szakiel, D. On path following control of nonholonomic mobile manipulators. Appl. Math. Comput. Sci. 2009, 19, 561–574. [Google Scholar] [CrossRef]
- Sandy, T.; Buchli, J. Dynamically decoupling base and end-effector motion for mobile manipulation using visual-inertial sensing. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 6299–6306. [Google Scholar] [CrossRef]
- Mohamed, S.A.S.; Haghbayan, M.H.; Westerlund, T.; Heikkonen, J.; Tenhunen, H.; Plosila, J. A Survey on Odometry for Autonomous Navigation Systems. IEEE Access 2019, 7, 97466–97486. [Google Scholar] [CrossRef]
- Zhang, J.; Yan, J.; Zhang, P. Fixed-Wing UAV Formation Control Design with Collision Avoidance Based on an Improved Artificial Potential Field. IEEE Access 2018, 6, 78342–78351. [Google Scholar] [CrossRef]
- Lyu, H.; Yin, Y. Fast Path Planning for Autonomous Ships in Restricted Waters. Appl. Sci. 2018, 8, 2592. [Google Scholar] [CrossRef]
- Weerakoon, T.; Ishii, K.; Nassiraei, A.A.F. An artificial potential field based mobile robot navigation method to prevent from deadlock. J. Artif. Intell. Soft Comput. Res. 2015, 5, 189–203. [Google Scholar] [CrossRef]
- Wu, Z.; Hu, G.; Feng, L.; Wu, J.; Liu, S. Collision avoidance for mobile robots based on artificial potential field and obstacle envelope modelling. Assem. Autom. 2016, 36, 318–332. [Google Scholar] [CrossRef]
- Cosio, F.A.; Castaneda, M.P. Autonomous robot navigation using adaptive potential fields. Math. Comput. Model. 2004, 40, 1141–1156. [Google Scholar] [CrossRef]
- Park, M.; Lee, M.C. A new technique to escape local minimum in artificial potential field based path planning. KSME Int. J. 2003, 17, 1876–1885. [Google Scholar] [CrossRef]
- Agirrebeitia, J.; Avilés, R.; de Bustos, I.F.; Ajuria, G. A new APF strategy for path planning in environments with obstacles. Mech. Mach. Theory 2005, 40, 645–658. [Google Scholar] [CrossRef]
- Zhang, T.; Zhu, Y.; Song, J. Real-time motion planning for mobile robots by means of artificial potential field method in unknown environment. Ind. Robot. Int. J. 2010, 37, 384–400. [Google Scholar] [CrossRef]
- Chen, J.; Tan, C.; Mo, R.; Zhang, H.; Cai, G.; Li, H. Research on path planning of three-neighbor search A* algorithm combined with artificial potential field. Int. J. Adv. Robot. Syst. 2021, 18, 17298814211026449. [Google Scholar] [CrossRef]
- Raheem, F.A.; Abdulkareem, M.I. Development of a* algorithm for robot path planning based on modified probabilistic roadmap and artificial potential field. J. Eng. Sci. Technol. 2020, 15, 3034–3054. [Google Scholar]
- Pan, H.; Guo, C.; Wang, Z. Research for path planning in indoor environment based improved artificial potential field method. In Proceedings of the 2017 Chinese Intelligent Automation Conference, Tianjin, China, 25 October 2017; pp. 273–281. [Google Scholar]
- Ogren, P.; Leonard, N.E. A convergent dynamic window approach to obstacle avoidance. IEEE Trans. Robot. 2005, 21, 188–195. [Google Scholar] [CrossRef]
- Klančar, G.; Seder, M. Coordinated Multi-Robotic Vehicles Navigation and Control in Shop Floor Automation. Sensors 2022, 22, 1455. [Google Scholar] [CrossRef] [PubMed]
- Khatib, O. Real-Time Obstacle Avoidance for Manipulators and Mobile Robots. In Autonomous Robot Vehicles; Cox, I.J., Wilfong, G.T., Eds.; Springer: New York, NY, USA, 1990; pp. 396–404. [Google Scholar] [CrossRef]
- Soodmand, I.; Kebbach, M.; Herrmann, S.; Bader, R.; Woernle, C. An Artificial Potential Field Algorithm for Path Planning of Redundant Manipulators Based on Navigation Functions. In Proceedings of the Advances in Robot Kinematics 2022, Bilbao, Spain, 26–30 June 2022; Altuzarra, O., Kecskeméthy, A., Eds.; Springer International Publishing: Cham, Switzerland, 2022; pp. 470–477. [Google Scholar]
- Badawy, A. Manipulator trajectory planning using artificial potential field. In Proceedings of the 2014 International Conference on Engineering and Technology (ICET), Cairo, Egypt, 19–20 April 2014; pp. 1–6. [Google Scholar] [CrossRef]
- Li, Y.; Li, D.; Zhu, W.; Sun, J.; Zhang, X.; Li, S. Constrained Motion Planning of 7-DOF Space Manipulator via Deep Reinforcement Learning Combined with Artificial Potential Field. Aerospace 2022, 9, 163. [Google Scholar] [CrossRef]
- Chen, Z.; Ma, L.; Shao, Z. Path Planning for Obstacle Avoidance of Manipulators Based on Improved Artificial Potential Field. In Proceedings of the 2019 Chinese Automation Congress (CAC), Hangzhou, China, 22–24 November 2019; pp. 2991–2996. [Google Scholar] [CrossRef]
- Hargas, Y.; Mokrane, A.; Hentout, A.; Hachour, O.; Bouzouia, B. Mobile manipulator path planning based on artificial potential field: Application on RobuTER/ULM. In Proceedings of the 2015 4th International Conference on Electrical Engineering (ICEE), Boumerdes, Algeria, 13–15 December 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Barros Viturino, C.C.; de Melo Pinto Junior, U.; Gustavo Scolari Conceição, A.; Schnitman, L. Adaptive Artificial Potential Fields with Orientation Control Applied to Robotic Manipulators. IFAC-PapersOnLine 2020, 53, 9924–9929. [Google Scholar] [CrossRef]
- Philippsen, R. E* Interpolated Graph Replanner. In Proceedings of the Workshop Proceedings on Algorithmic Motion Planning for Autonomous Robots in Challenging Environments, Held in Conjunction with the IEEE International Conference on Intelligent Robots and Systems (IROS), San Diego, CA, USA, 29 October–2 November 2007. [Google Scholar]
- Klančar, G.; Zdešar, A.; Krishnan, M. Robot Navigation Based on Potential Field and Gradient Obtained by Bilinear Interpolation and a Grid-Based Search. Sensors 2022, 22, 3295. [Google Scholar] [CrossRef] [PubMed]
- Bilinear Interpolation. Available online: https://en.wikipedia.org/wiki/Bilinear_interpolation (accessed on 15 February 2022).










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Joint | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
|---|---|---|---|---|---|---|---|
| [m] | 0 | 0 | 0.0825 | −0.0825 | 0 | 0.0880 | 0 |
| [m] | 0.333 | 0 | 0.316 | 0 | 0.384 | 0 | 0.1070 |
| [rad] | − | 0 | |||||
| [rad] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Baumgartner, J.; Petrič, T.; Klančar, G. Potential Field Control of a Redundant Nonholonomic Mobile Manipulator with Corridor-Constrained Base Motion. Machines 2023, 11, 293. https://doi.org/10.3390/machines11020293
Baumgartner J, Petrič T, Klančar G. Potential Field Control of a Redundant Nonholonomic Mobile Manipulator with Corridor-Constrained Base Motion. Machines. 2023; 11(2):293. https://doi.org/10.3390/machines11020293
Chicago/Turabian StyleBaumgartner, Jakob, Tadej Petrič, and Gregor Klančar. 2023. "Potential Field Control of a Redundant Nonholonomic Mobile Manipulator with Corridor-Constrained Base Motion" Machines 11, no. 2: 293. https://doi.org/10.3390/machines11020293
APA StyleBaumgartner, J., Petrič, T., & Klančar, G. (2023). Potential Field Control of a Redundant Nonholonomic Mobile Manipulator with Corridor-Constrained Base Motion. Machines, 11(2), 293. https://doi.org/10.3390/machines11020293