1. Introduction
The chassis control of road vehicles is a hot topic in both industry and academia. There are several important criteria for vehicles, including driving comfort, vehicle safety, and stability. For this reason, vertical dynamics control has an important role in vehicle technology, where vertical control is performed by controlling the vehicle’s suspension system. The fundamental of a vehicle suspension system is to isolate the vehicle from road irregularities in order to improve road holding and driving comfort characteristics [
1]. It consists of three main elements, which are an elastic element, the damping element, and several mechanical elements. The elastic element delivers a force to the suspension while it carries the whole static load. This element is typically a coil spring. The damping element is usually a shock absorber that delivers a dissipative force to the elongation speed. The mechanical element group links the sprung body to the unsprung mass [
2].
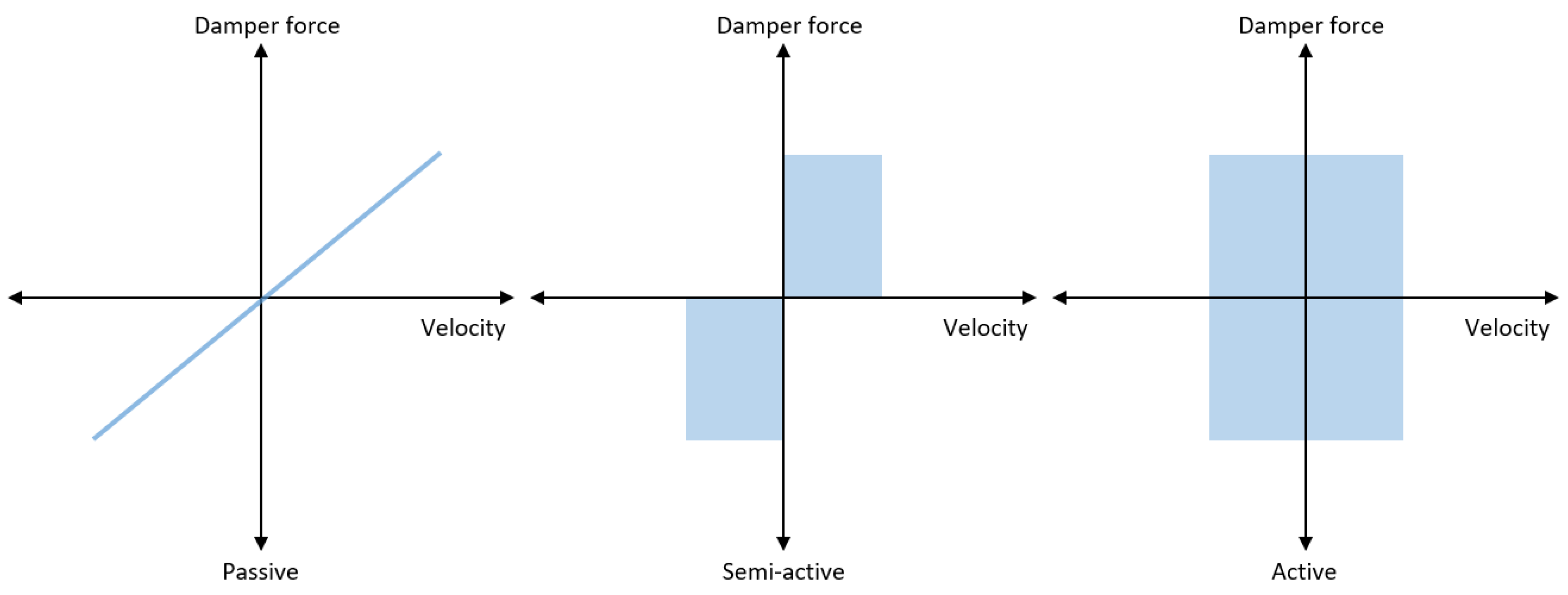
The suspension systems can be classified into three main categories: passive, active, and semi-active suspension. This classification depends on the damper force vs. damper velocity diagram, which is shown in
Figure 1. Semi-active suspension has great potential in the automotive market due to its advantages compared to active and passive suspensions, such as negligible power demand, improvement in vehicle performance, safety features, and low weight and costs [
2,
3]. Thus, semi-active suspension is studied in this paper. The limitation of passive suspensions to improve the driving comfort and road holding together has motivated the development of controlled suspension systems, both active and semi-activeControlled suspension systems are developed due to the lack of improvement in both driving comfort and road holding together [
4].
The primary problem of the vehicle suspension design is to deal with conflicting demands, such as high driving comfort, good road-holding features, and low suspension working space [
4]. In order to ensure good driving quality, the vehicle must be isolated from road disturbances and irregularities. The vertical acceleration of the vehicle quantifies the driving quality. Furthermore, ensuring road-holding performance is realized by considering the tire loads [
1]. Moreover, optimal driving comfort and road-holding performance should be ensured while considering the allowable suspension working space of the vehicle [
5].
Due to the high availability of measurement data of vehicles, the performances of future vehicles can be improved. There are several different road conditions and irregularities which need to be considered during the design. Thus, the vehicle must be adaptive to different road conditions and irregularities, in addition to altering velocities, in order to ensure vertical and longitudinal comfort and road holding. For this reason, vertical control is a key point in order to achieve road-holding performance with different road irregularities, and the integration of the longitudinal dynamics of the vehicle into the vertical control can also ensure driving comfort. The longitudinal dynamics of the vehicle affect the vertical dynamics significantly, which can be observed by analyzing several data and simulations where it was shown that the velocity of the vehicle changes the vertical dynamics dramatically. Therefore, an online, reconfigurable, adaptive, semi-active suspension controller must be designed in order to ensure the road adaptivity of the vehicle. At the same time, the cruise controller must also be designed and integrated into the semi-active suspension control to ensure driving comfort and road-holding performance of the vehicle.
There are several control methods that deal with semi-active suspension control in the literature, such as Skyhook [
6,
7], linear-quadratic control [
8,
9], model predictive control [
10,
11], and
control [
12,
13]. However, the real-time configuration is not possible with the mentioned control methods. Due to the LPV framework, the controller can be reconfigured online by changing a scheduling variable [
14,
15]. Thus, the LPV framework has been used in this study.
Most of the adaptive preview control methods found in the literature, and in industry practice as well, rely on camera-based road assessment, as detailed in [
16]. In that paper, adaptive Skyhook suspension was presented to adjust the vertical damping force of the suspension in real time using machine-vision-based road data, showing great improvement over speed bumps. In order to avoid the additional cost of a camera-based system and to gain information of various road distortions, some recent studies focused on exploiting the possibilities using novel vehicle–cloud–vehicle (V2C2V) communication. For instance, in [
17], a method was proposed that uses cloud computing techniques to improve the ride quality of the vehicle by selecting different damping modes for the semi-active suspension based on the forthcoming road profile. A comprehensive analysis of preview-based techniques for vehicle suspension control has been performed; see [
18].
The method in this paper has an advantage over previous methods by integrating cruise control in the semi-active control process. Thanks to the LPV framework, the controller can be reconfigured online by changing a scheduling variable [
14,
15]. For this reason, the LPV framework was used in this study. Although some previous research [
19] has already aimed at integrating the longitudinal and vertical dynamics control in an LPV framework, the present paper deals with different types of road irregularities, focusing on more challenging road bumps and sine-sweep distortions.
A detailed literature review showed that the earlier proposed systems do not focus on the online reconfigurable road adaptivity by considering the cruise control and vehicle velocity for different road irregularities. Due to this research gap and problem, the new online, reconfigurable, adaptive, semi-active suspension controller must be integrated into the look-ahead cruise control, where the road adaptivity is ensured with the adaptivity method.
This paper is an extended version of the Mediterranean Conference on Control and Automation (MED) 2022 article [
20]. The novelties of the paper are the integration of velocity designer and tracing control as a cruise controller and the performed extended simulation of the proposed method. The database design is also introduced in this paper, which was not in the previous paper, and an introduction section is provided.
This paper proposes a cruise control system. The design is based on the ISO 2631-1 standard, and the velocity is tracked with the proposed velocity-tracking controller that was designed through an LPV framework. The adaptive semi-active suspension controller was designed through the LPV method, where the scheduling variable enables one to perform a trade-off between vehicle performances, which are vehicle stability and driving comfort. Integration of these controllers makes the system intelligent and road-adaptive. The integration was performed with a sensitive adaptivity algorithm that is based on the designed database.
The article is organized as follows:
Section 2 presents the modeling of the quarter-car suspension and LPV control synthesis of the adaptive semi-active suspension control.
Section 3 introduces the cruise control system, where
Section 3.1 presents the velocity design based on the ISO 2631-1 standard and
Section 3.2 proposes a velocity-tracking controller through the LPV method. The road adaptivity algorithm, database design, and system integration are shown in
Section 4. The operation of the proposed method is demonstrated and validated in
Section 5, which was achieved in a TruckSim environment by integrating real road data. Finally, concluding remarks are presented in
Section 7.
2. Semi-Active Suspension Controller Design
In this section, the design of a semi-active suspension controller is introduced. This design has already been proposed in [
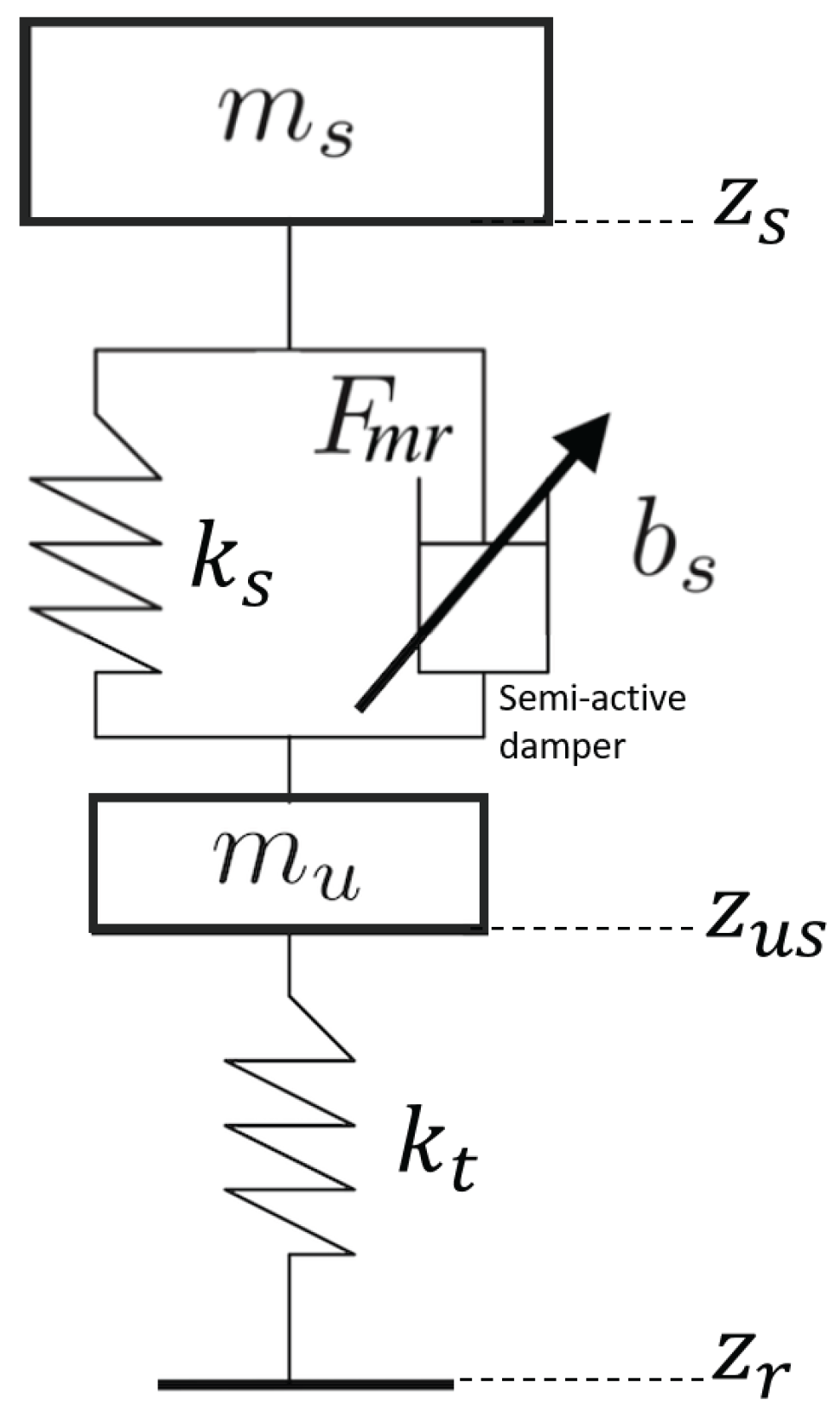
20], which is the basis of the design in this study. The widely used control-oriented quarter-car model is applied in this study; the model is shown in
Figure 2. The dynamics of the actuator and semi-active suspension are described in Equations (
1) and (
2).
Here, sprung mass and unsprung mass are expressed by
and
, and the tire and spring vertical stiffness are described as
and
. The time constant and shock absorber damping rate are represented as
and
, respectively. Vertical displacements of unsprung mass and sprung mass are expressed by
and
; the road disturbance derived from road irregularities is represented as
. The control input
u is
F, and the damper force generated by the actuator is
. The relationship between the damper force generated by the actuator and control input is presented in (
2).
Table 1 shows the parameters of the suspension model.
Figure 2.
Control-oriented quarter-car model.
Figure 2.
Control-oriented quarter-car model.
The components of the state vector
are shown in The state vector
x is selected as
; see Equation (
3).
Next, the state-space representation form must be written from the system given with Equation (
1) as follows:
Equation (
1) is arranged to find matrices according to the measured signal, performance vector components, and state-vector components. Depending on Equation (
Section 2), the results are arranged, and the coefficients of the
are computed. The computed coefficients give the matrices for the control design.
The unmodelled dynamics () are presented as follows: at low frequencies and at high frequencies.
The performance specifications are defined to achieve a trade-off between vehicle stability and driving control, and damper force must also be minimized. The first goal is enhancing the driving comfort by defining the following performance criterion: . Here, the vertical acceleration of the sprung mass is minimized. The second goal is ensuring roll and pitch stability of the vehicle by minimizing the suspension deflection, . The third goal is the minimization of tire deformation by the following criterion: . This goal enhances the road holding of the vehicle. The last goal is minimizing the damper force, . All the goals are put in a performance vector .
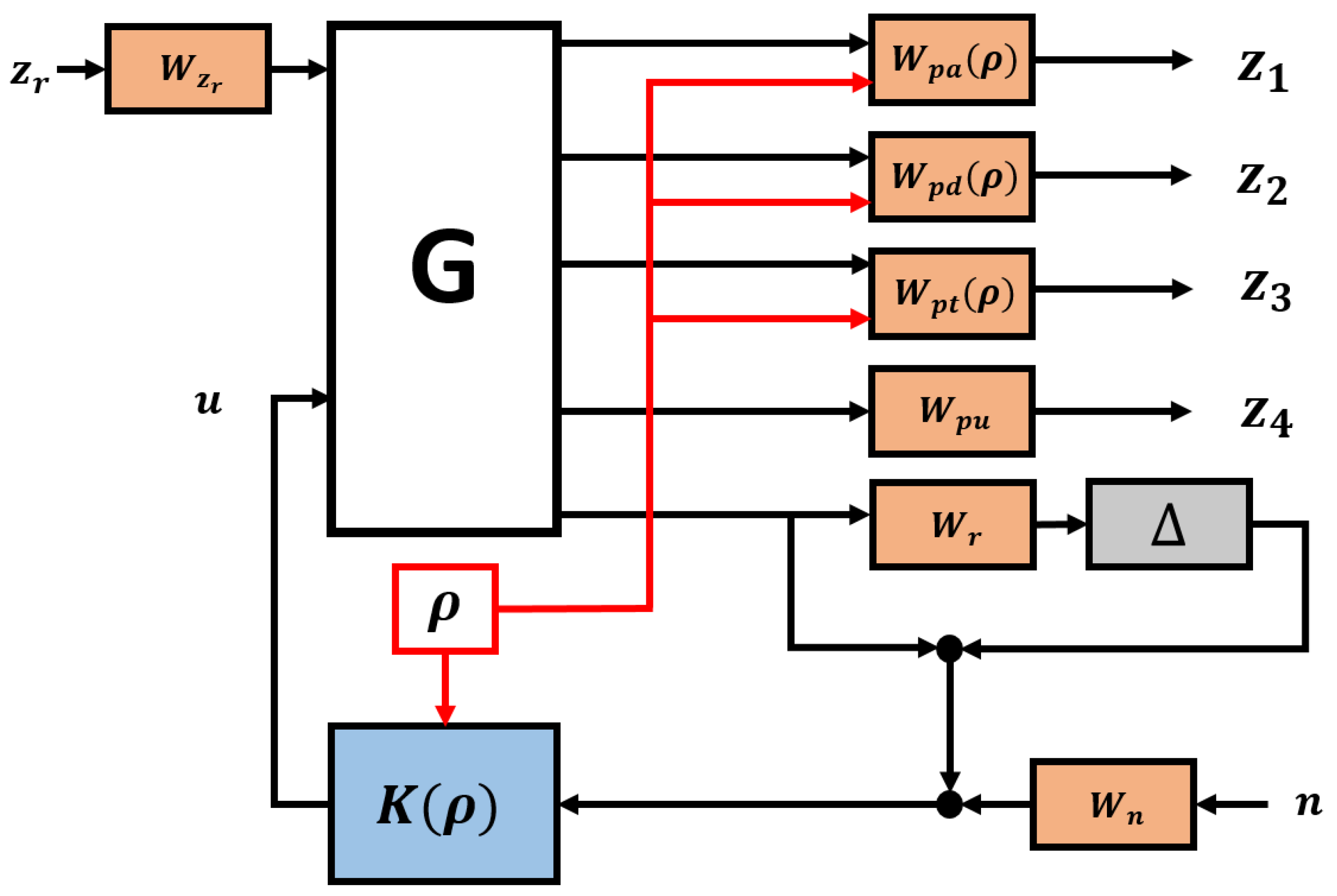
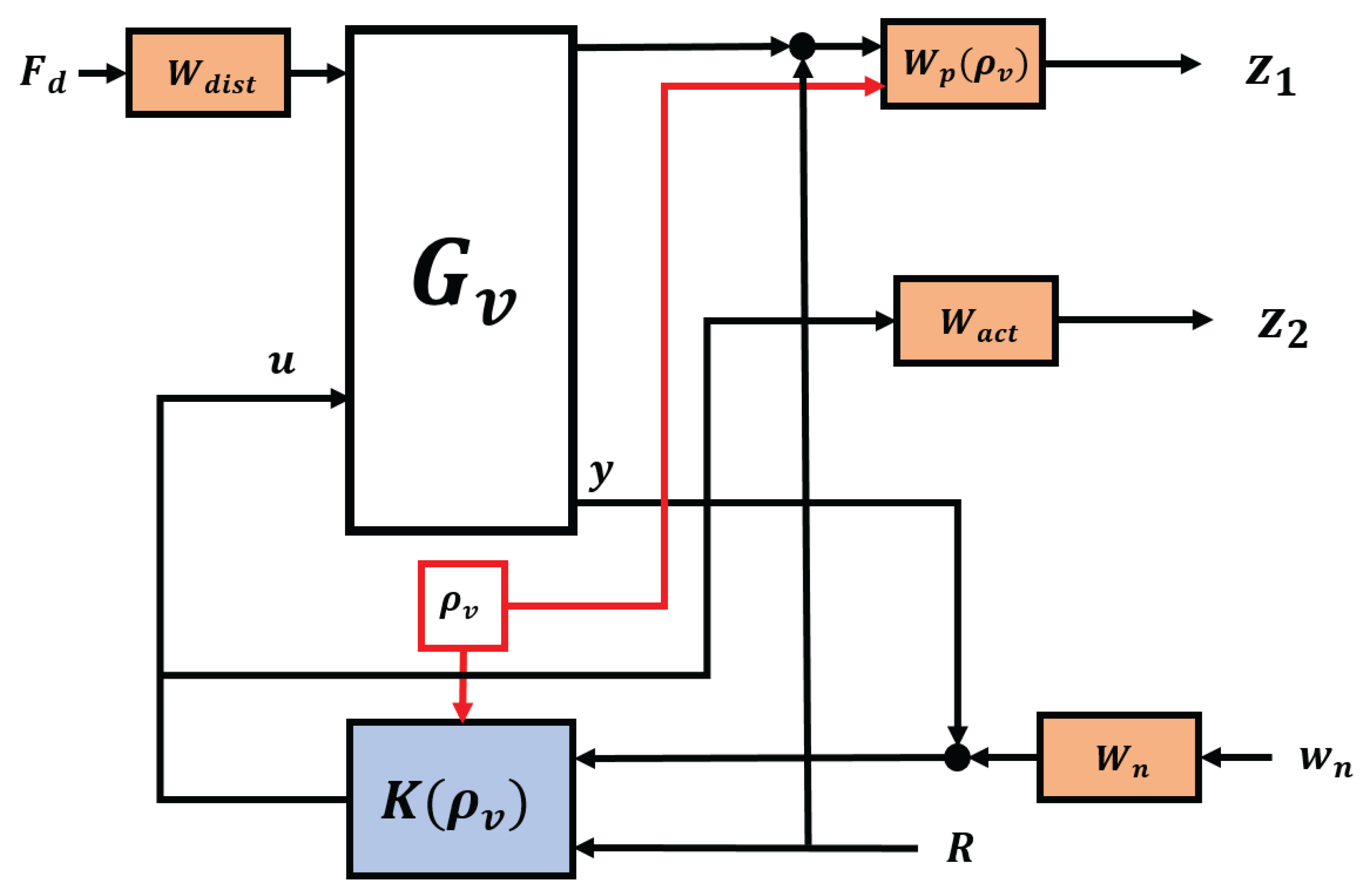
Figure 3 shows a closed-loop architecture with a weighting strategy, where
G is quarter-car,
K is a designed semi-active suspension controller that is characterized by scheduling variable
,
is road disturbance, and
is measured output.
The uncertainties of the vehicle model are considered by and the weighting function. Road disturbances and vehicle performances are represented by weighting functions and .
Performance weighting functions aim to keep the tire deflection (), suspension deflection (), control input (), and sprung mass acceleration () small over the required frequency range. The driving comfort is expressed by , and the road holding and safety performance of the vehicle are represented by and .
The performance weighting functions are designed by ensuring the trade-off between performances. The scheduling variable
is characterized the weighting functions
,
, and
in order to specify the significance of one of the performances for the incoming road conditions. The weighting functions are given as follows:
where
and
are designed parameters. The other weighting functions do not contain scheduling variables, and they are of a linear form.
An LPV controller has been designed in a manner such that closed-loop quadratic stability is ensured, while at the same time the induced
norm from the disturbance
to the performance vector
z is smaller than the value
; see [
21]. Hence, the disturbance attenuation problem is formalized as follows:
The solution of the parameter-varying control design problem is governed by the set of infinite-dimensional LMIs which is satisfied for all
; thus, the problem is convex. The LPV problem is arranged by gridding the parameter space, then solving the set of linear matrix inequalities that hold for the subset of
, as detailed in [
22]. The controller that settles the LPV
-performance problem can be specified as the feasibility of a set of the linear matrix inequalities that can be solved numerically. The closed-loop system is exponentially stable, if there is an
satisfying the following LMIs for all
, where
is a parameter-dependent Lyapunov function for the closed-loop system; see [
23].
In the designed reconfigurable LPV controller, stands, where the road holding and stability performance of the vehicle are preferred, whereas the driving comfort is considered by . The combination of performance is ensured if the scheduling variable is between the edge values.
4. Road Adaptivity and System Integration
In this section, the road adaptability algorithm is proposed with the integration of the system. First, database design is introduced briefly, and then scheduling variable design is explained. Finally, system integration is proposed with all controllers and adaptivity methods.
4.1. Database Design
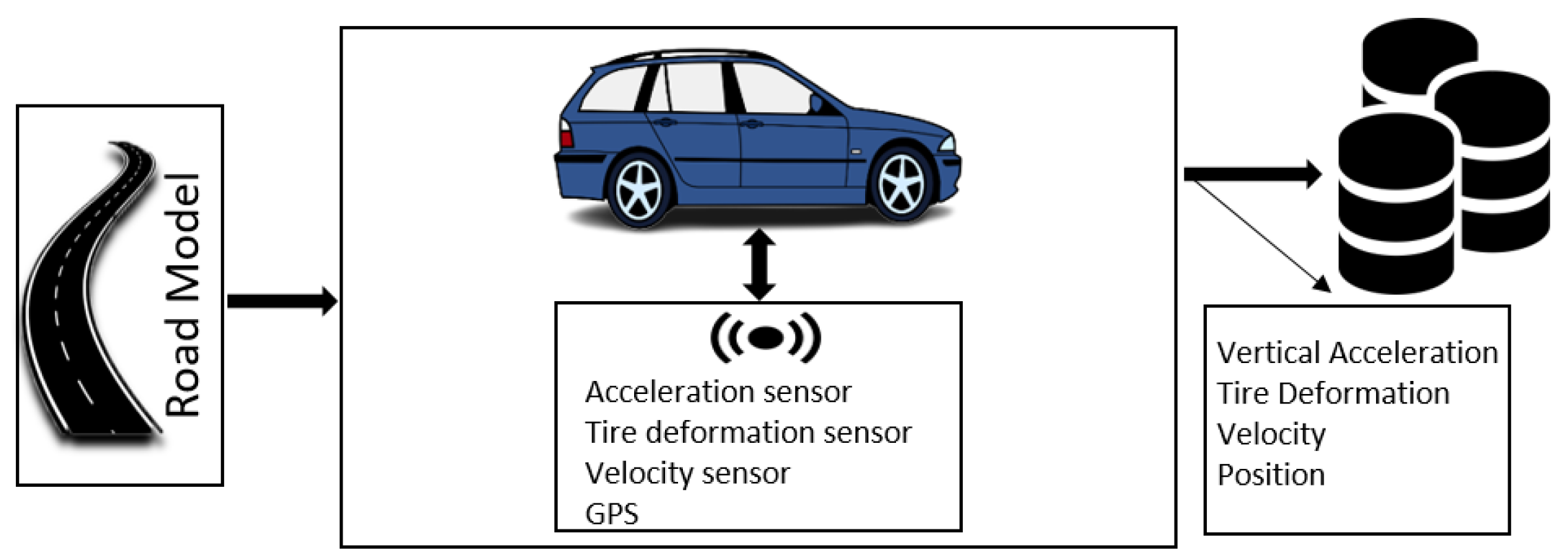
The previous measurements or available data related to vehicle dynamics and road conditions have a significant role in the study in order to propose the adaptivity method for the integration of velocity and adaptive semi-active suspension control. These measurements or available data must be stored in a database to use at a dedicated time. For this reason, the database has been designed to use with the adaptivity method. In this study, the detection or estimation of road model and irregularity is not in the focus; thus, the position information of road irregularities is stored in the database. The data collection architecture is shown in
Figure 7.
The data are collected by the onboard unit of the vehicle with multiple sensors (GPS, acceleration, tire deformation, velocity). The collected data are listed below, and these collected data are gathered and stored in a database:
Vertical acceleration;
Tire deformation;
Velocity;
Position.
Several sensors are used for measurement: acceleration sensor, tire deformation sensor, velocity sensor, and GPS. A tire deformation sensor is not common or easily accessible, and there are several methods and studies to design the sensor that measures the tire deformation [
26,
27].
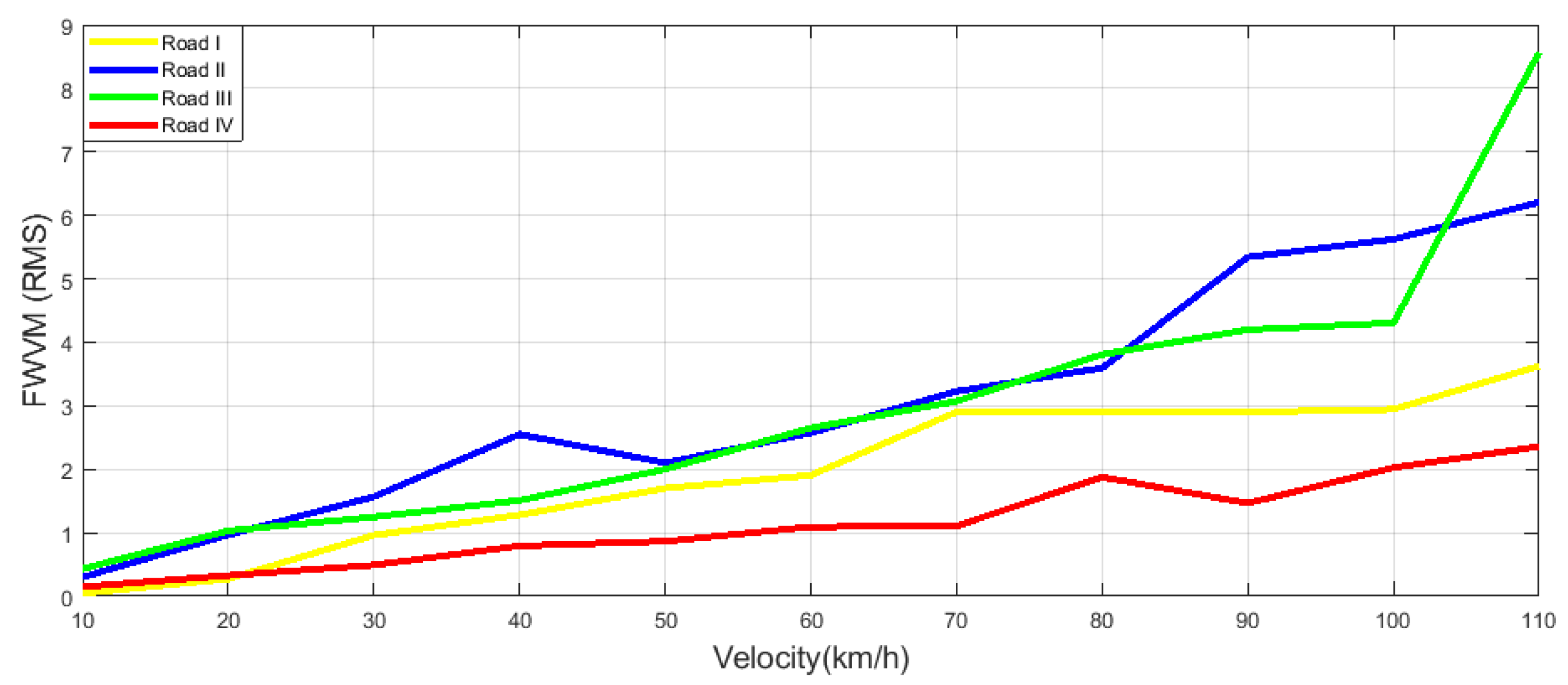
The calculations of the root mean square (RMS) values of performances are found below:
where
and
are time-weighted acceleration and tire deformation, respectively; and
and
are the numbers of tire deformation and acceleration values.
The normalized vertical acceleration and tire deformation values are calculated as follows:
where
is the normalized value; the RMS of the performance is
;
k, where
is the tire deformation and
is the vertical acceleration performance;
i is the road type;
j is the velocity of the vehicle.
4.2. Scheduling Variable Design
The scheduling variable can be changed in real time, and thanks to the LPV method, the controller’s behavior can be modified by changing this variable. The road adaptivity is performed by designing the scheduling variable for each velocity and road irregularity.
The scheduling variable is designed in two steps. In the first step, performance index is found. The second step contains the calculation of a shifting index depending on and ; a scheduling variable is found.
In the first step, it is necessary to compare performance results in the road profile and the corresponding velocity in the database. For this reason, the normalized value of RMS values of vertical acceleration and tire deformation was calculated and stored in a database.
The comparison of these normalized values gives importance to one of these performances. In the case of the normalized value of tire deformation,
is greater than the normalized value of vertical acceleration
, the focus should be tire deformation, and this performance must be minimized by choosing
. In the case of the normalized value of vertical acceleration
being greater than the normalized value of tire deformation
, the focus should be vertical acceleration, and this performance must be minimized by choosing
. If the normalized values are equal each other, then
is selected as 0.5. The selection procedure of the performance index is shown in (
15).
The shifting index describes the distance of the scheduling variable from its middle range, which is 0.5. In the next step, shifting index
is found according to the rate index
that is calculated by the average rate between the normalized value of tire deformation and vertical acceleration in the database, and it was taken as two according to data in the database. The reason for the selection of the rate index as two is that if the rate of the corresponding normalized performance value is greater than two,
is
. Here,
cannot be greater than
because of limitation of scheduling variable (
). The calculation of the shifting index is shown in Equation (
16).
Finally, the scheduling variable is calculated based on the results of vehicle’s performance in the corresponding velocity and road profiles, performance index, and shifting index. It is handled by Equation (
17).
4.3. System Integration
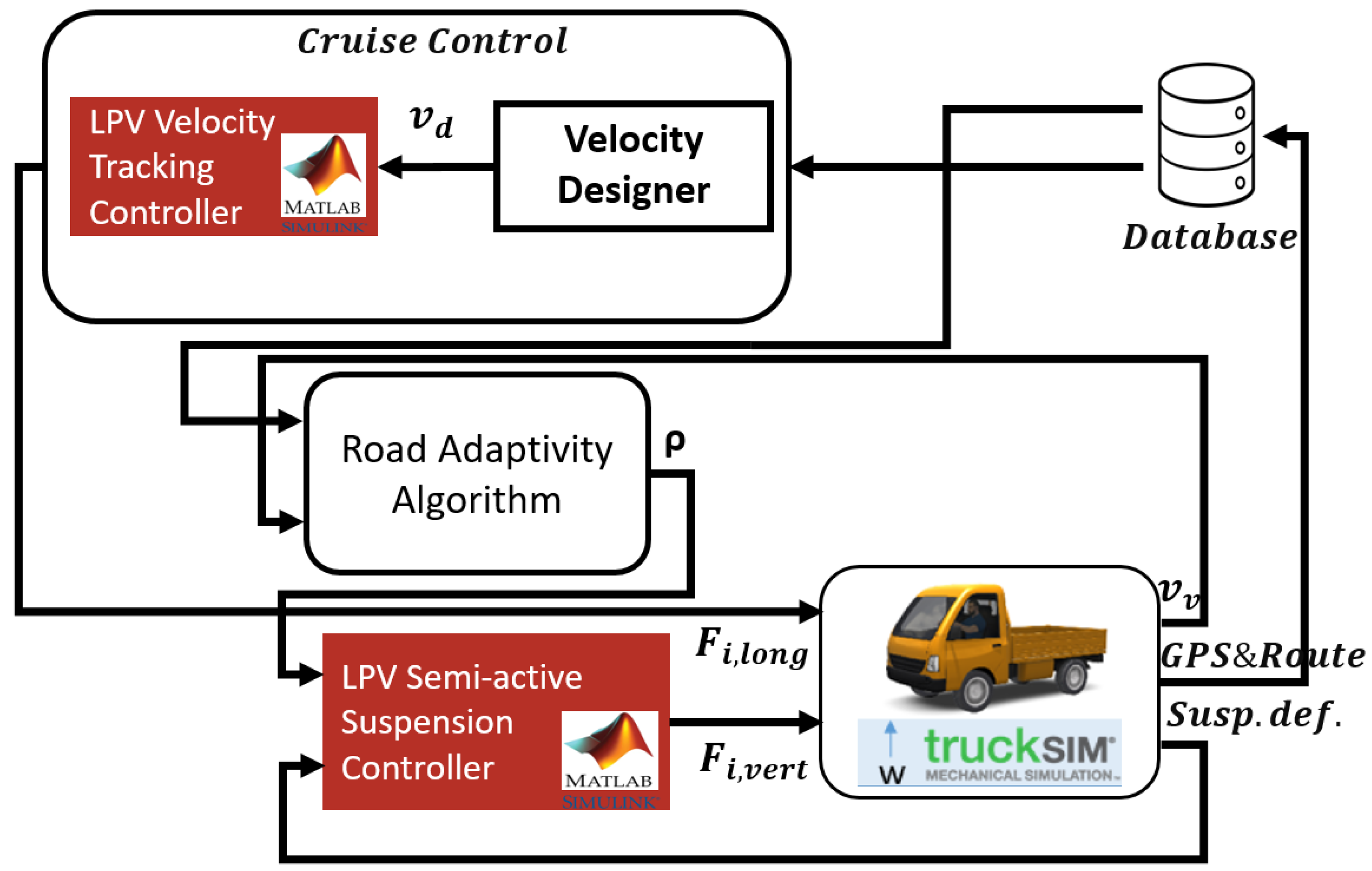
The system’s architecture is depicted in
Figure 8. The velocity-tracking controller and semi-active suspension controller were designed and integrated into Simulink. The TruckSim simulation environment was integrated into Simulink. Velocity, GPS, route, and suspension deflection of the vehicle were gathered from TruckSim to Simulink. The GPS&Route information was stored in a database, and this database was used in cruise control and for the road adaptivity algorithm. Velocity was designed with look-ahead road information, and designed velocity was tracked by an LPV velocity-tracking controller. It calculates the longitudinal force for each tire. The road adaptivity algorithm finds the dedicated scheduling variable for each velocity and road irregularity. The semi-active suspension controller calculates the vertical damper forces for each corner of the vehicle by using scheduling variables and measured output suspension deflection.
5. Simulation Results and Analysis
For simulation purposes, a compact utility truck was selected due to its independent front and rear semi-active suspension. Note that for heavy duty trucks having rigid front and rear axles or multiple wheel setups, the proposed quarter car-based controller design is not applicable. With the modification of the baseline vehicle model, it is possible to design a semi-active damper controller with a similar method considering road disturbances and velocity; however, due to the significantly changing payload, comfort requirements are generally met by the use of seat suspension systems [
28].
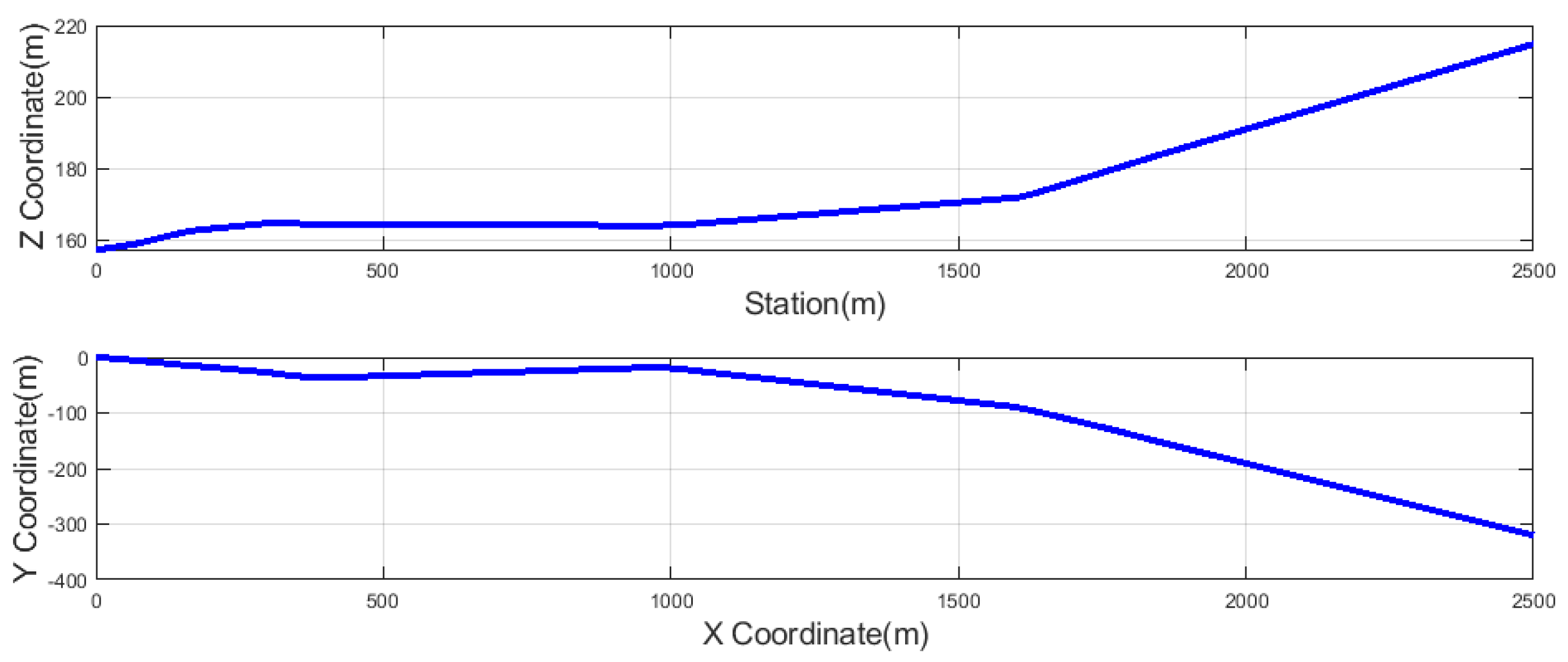
The simulation route is the Hungarian highway (Gyöngyös–Kápolna) based on real geographical data; see
Figure 9. The simulation rouse was implemented in a TruckSim environment. The speed limit of the simulation route was 70 km/h. The designed velocity, designed scheduling variable, road irregularities, and their locations are shown in
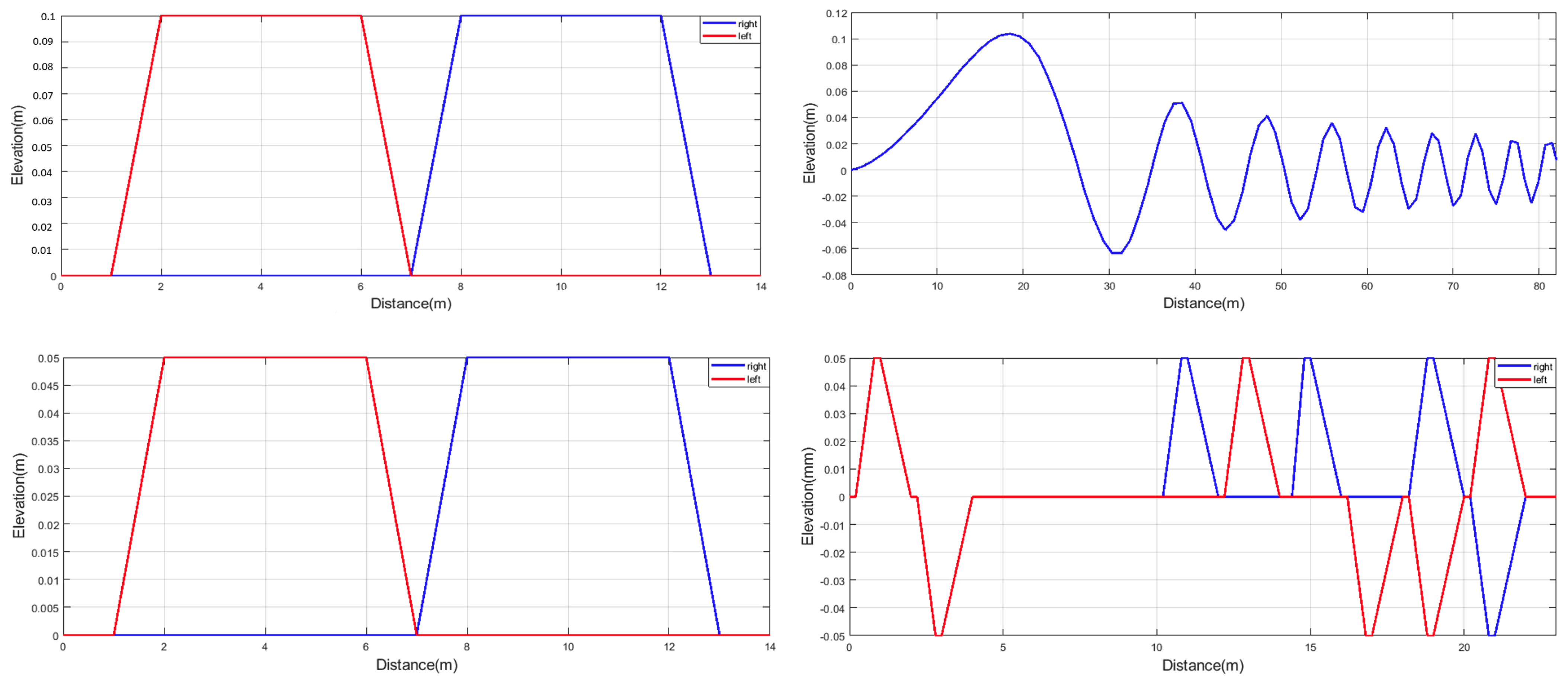
Table 4. The four road irregularities were used in eight locations of the simulation road.
There are two simulations that were performed in order to demonstrate the effectiveness of the proposed method.
Simulation 1: Utility truck with semi-active suspension, scheduling variable, and vehicle velocity as constants.
Simulation 2: Utility truck with adaptive semi-active suspension, scheduling variable, and velocity varying depending on the road irregularity.
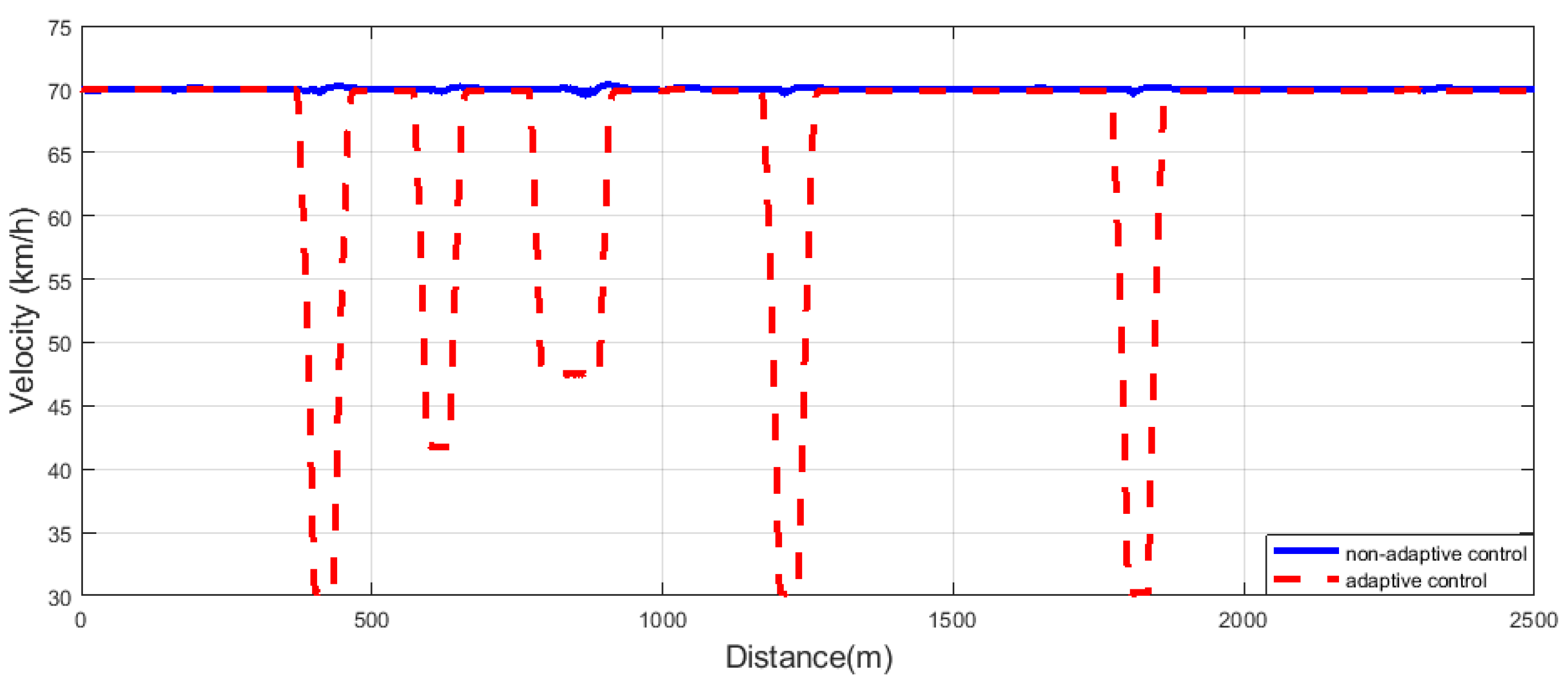
The designed velocity is depicted in
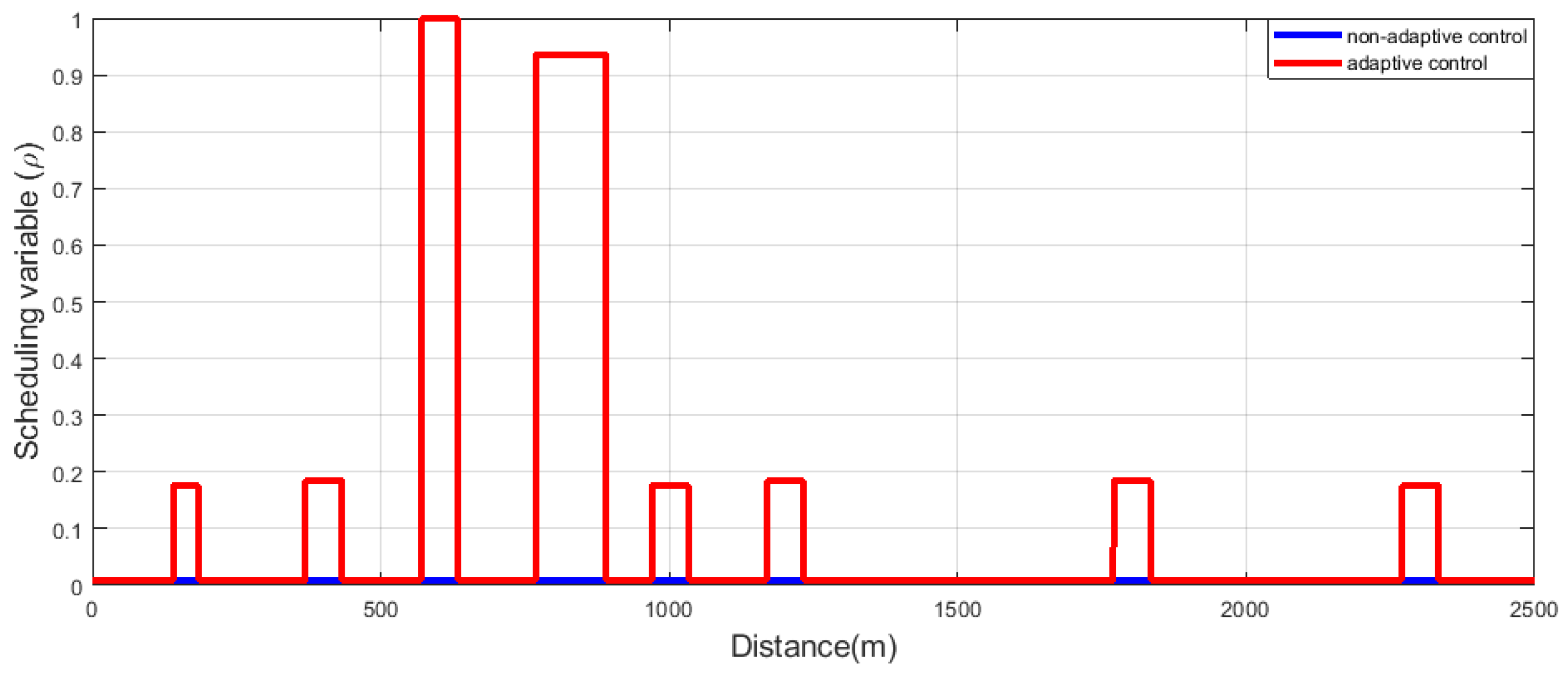
Figure 10, and the designed scheduling variable is shown in
Figure 11. The performance results are depicted with their dedicated figures, and the RMS values of improvement on performances are shown in
Table 5. Here, the overall value is the average of each corner of the vehicle. The
is front-left corner,
is the front-right corner,
is the rear-left corner, and
is the rear-right corner of the vehicle.
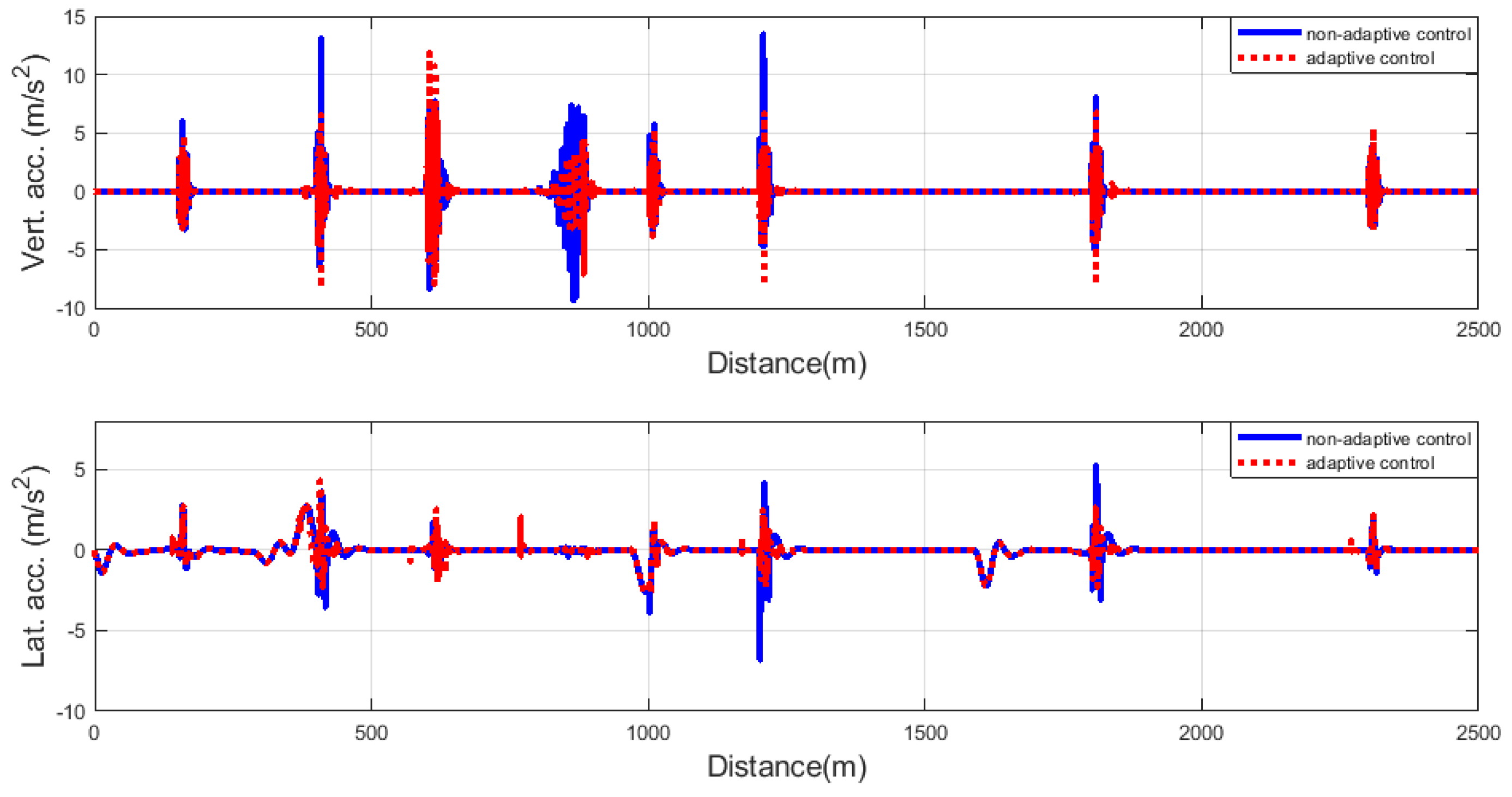
The driving comfort performance is represented by the vertical acceleration of the vehicle. Although lateral acceleration is not a performance in the controller design, it also represents driving comfort.
Figure 12 shows both the vertical and lateral acceleration of vehicles in several road irregularities. It is well demonstrated that the accelerations were improved with the proposed adaptivity method. The performance improvement is different for each road irregularity. The greatest improvement was in the second road irregularity, which was 10 cm bumps and located in 400 m, and minor improvement occurred in 5 cm bumps because of their small value. In all irregularities, the adaptive method had smaller acceleration values except the sine-sweep irregularity, and the RMS of accelerations for each irregularity is smaller for the proposed method. The improvements in both vertical and lateral accelerations are also depicted in
Table 5.
The second performance consideration is tire deformation, and it shows the contact between the tire and the road surface. For this reason, this is represented as a road-holding performance. The adaptive method decreased the tire deformation value significantly. The front-left tire deformation had a smaller change in the sine-sweep irregularity, and the most significant improvement was in the several-bumps irregularity. This performance improvement is depicted in
Figure 13. The significant improvement can be depicted in the
tire, and overall improvement was around 10%.
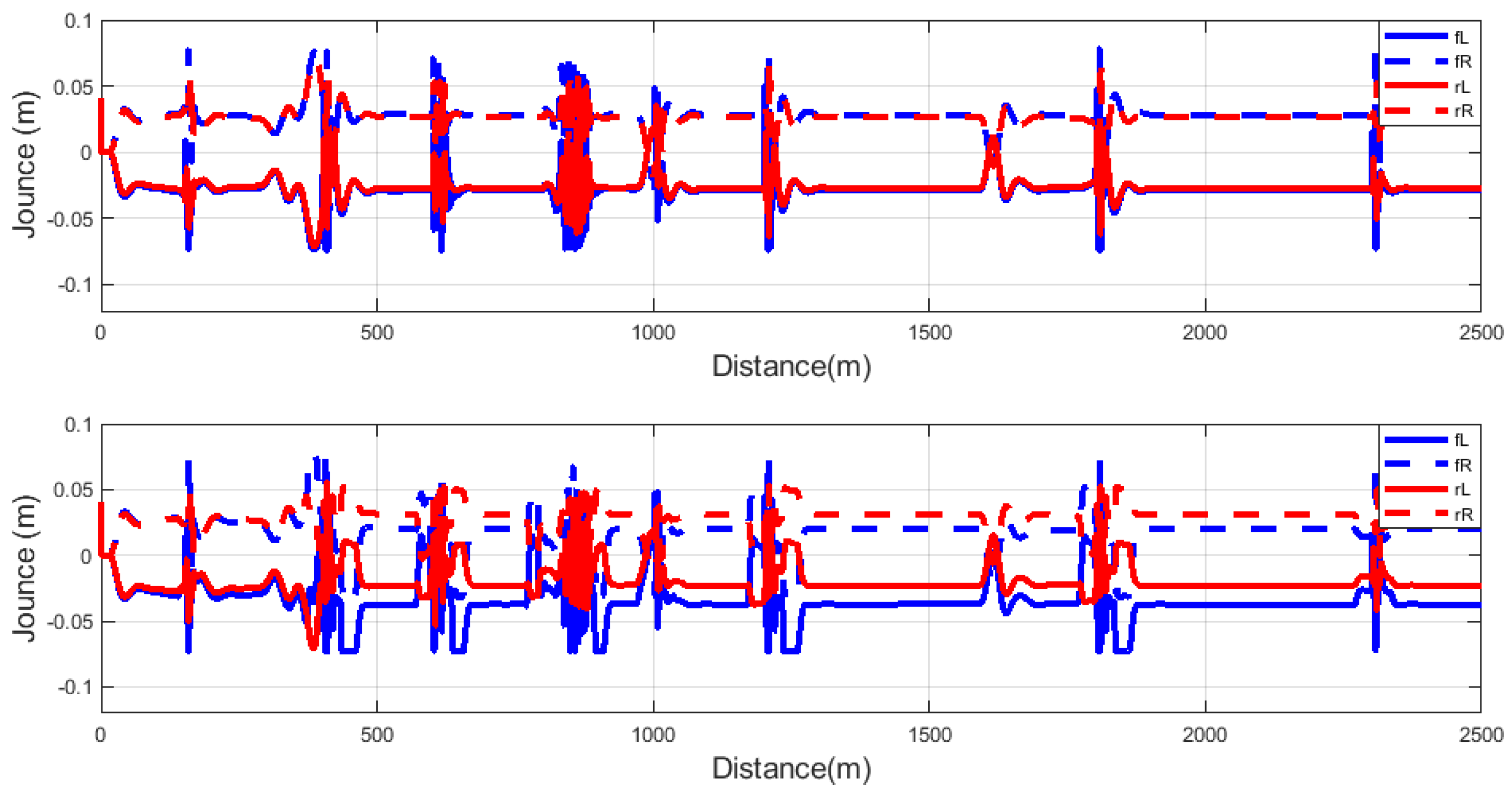
The next performance consideration was vehicle stability, which is presented as a suspension deflection. Vertical deflection between sprung and unsprung masses gives the stability performance of the vehicle. Overall, the suspension deflection performance was improved, though this improvement was not the same for each road irregularity due to the trade-off that is ensured by the scheduling variable. The results of the suspension deflection are shown in
Figure 14. The significant improvements were for the sine-sweep road irregularity and several bumps at 600 and 800 m, respectively. Improvements at other locations were not that large due to the improvement in driving comfort performance. The overall improvement in the suspension deflection was negative; it can be said that there was no overall improvement in suspension deflection, whereas the improvement could be observed on
and
suspension.
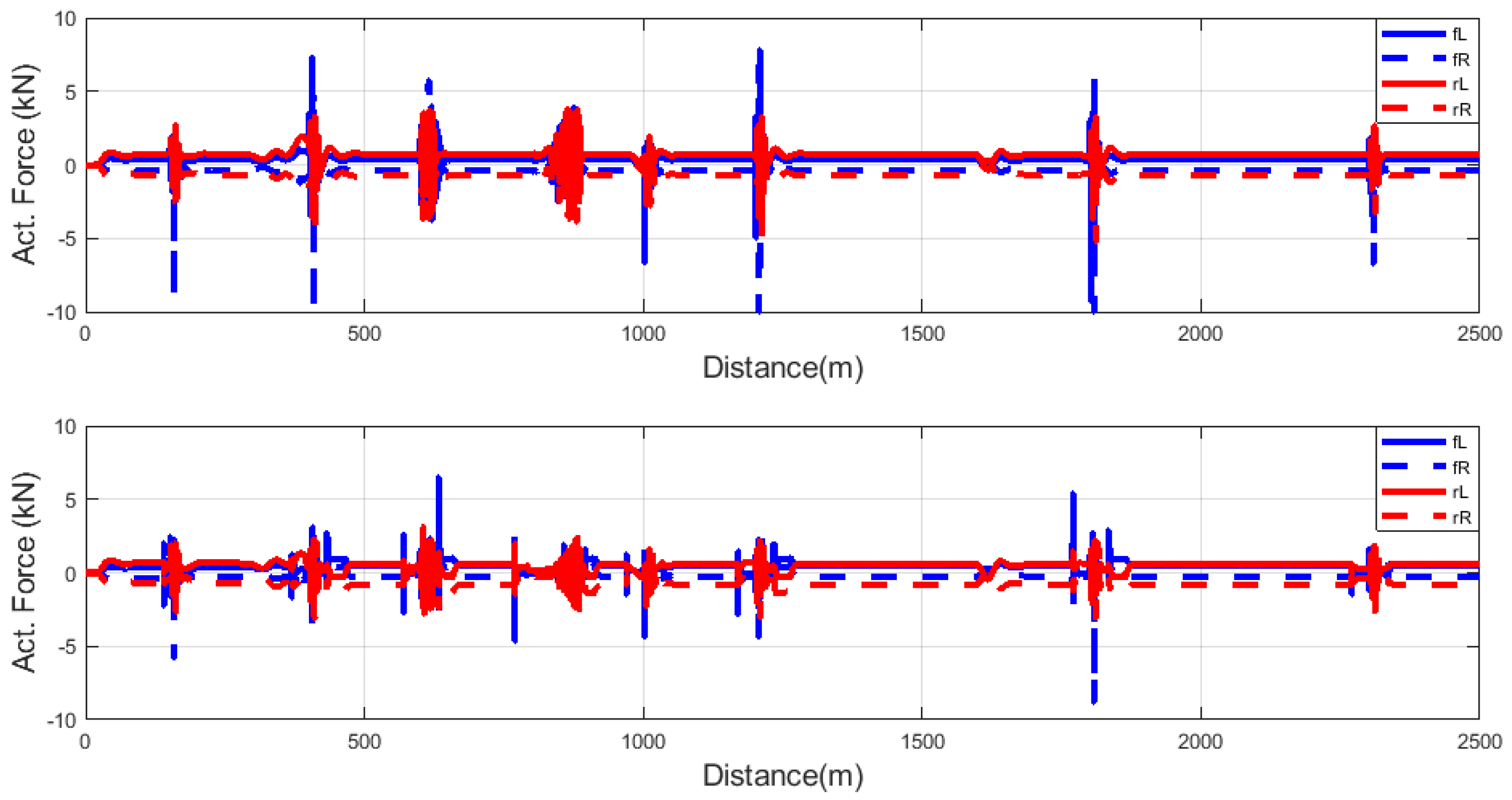
The last performance consideration in the control synthesis is minimizing the control force. For this reason, it is expected that control forces will be reduced with the adaptive method. Despite other performance considerations, the control force weighting function does not contain the scheduling variable; thus, the control forces are minimized with the proposed controller compared to the uncontrolled suspension. The reason why control force is minimized in the adaptive method is an improvement in other performances. This performance is depicted in
Figure 15, where we can see the actuated forces were reduced with an adaptive method. It is well shown that the controller forces were decreased for each road irregularity. The biggest reduction was for the 10 cm bumps irregularity. The overall improvement in the control force was nearly 15%, whereas the most significant improvement was the
damper force with nearly 25%.





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}