
Optimal Scheduling of Photovoltaic Generators in Asymmetric Bipolar DC Grids Using a Robust Recursive Quadratic Convex Approximation




Abstract
1. Introduction
1.1. General Context
1.2. Motivation
1.3. Literature Review
1.4. Contribution and Scope
- i.
- A recursive convex approximation based on Taylor’s series expansion to relax the hyperbolic relation between constant power terminals and voltage profiles is performed.
- ii.
- Uncertainties in power available for the PV generators are considered in the proposed model to transform it into a robust model.
- iii.
- Numerical validations and scenarios are performed to validate the robust convex model’s performance in a modified 21-bus test system.
1.5. Document Organization
2. Multiperiod OPF Formulation
2.1. Mathematical Formulation
2.2. Model Interpretation and Complexity
3. Approximated Recursive Quadratic Convex Model Formulation and Its Iterative Implementation
3.1. Characterization and Properties of the Optimization Model
- i.
- The objective function is a nonlinear quadratic function associated with multiple products between voltages. However, this is a convex function since the conductance matrix of the network is positive semidefinite [6]. Note that the objective function (1) can be rewritten as presented below.which provides evidence that if , then the objective function is a sum of convex quadratic functions, i.e., a convex function. Note that is a vector that contains all the nodal voltages ordered per pole and node, respectively.
- ii.
- The set of equality constraints (2)–(4), and (20) is part of the affine constraints, i.e., convex planes; in addition, box-type constraints (12)–(19) are linear inequality constraints that make part of a convex solution space.
- iii.
- The set of equality constraints (2)–(4), and (20) is part of the affine constraints, i.e., convex planes; in addition, box-type constraints (12)–(19) are linear inequality constraints that make part of a convex solution space.
- iv
- The set of equality constraints (5)–(11) represents the nonlinear non-convex set of equations for the problem under investigation, since these are hyperbolic constraints, which implies that to reach a convex equivalent optimization model, these must be convexified using linear or conic approximations.
3.2. Convexification of the Hyperbolic Constraints
3.2.1. Proposed Convex Relaxation for Constant Power Loads
3.2.2. Proposed Convex Approximation for Nodes with Dispersed Generation Sources
3.2.3. Recursive Quadratic Convex Approximation
3.3. Robust RQCA Model
| Algorithm 1: Robust Recursive Quadratic Convex Algorithm. |
 |
4. Test System and Results
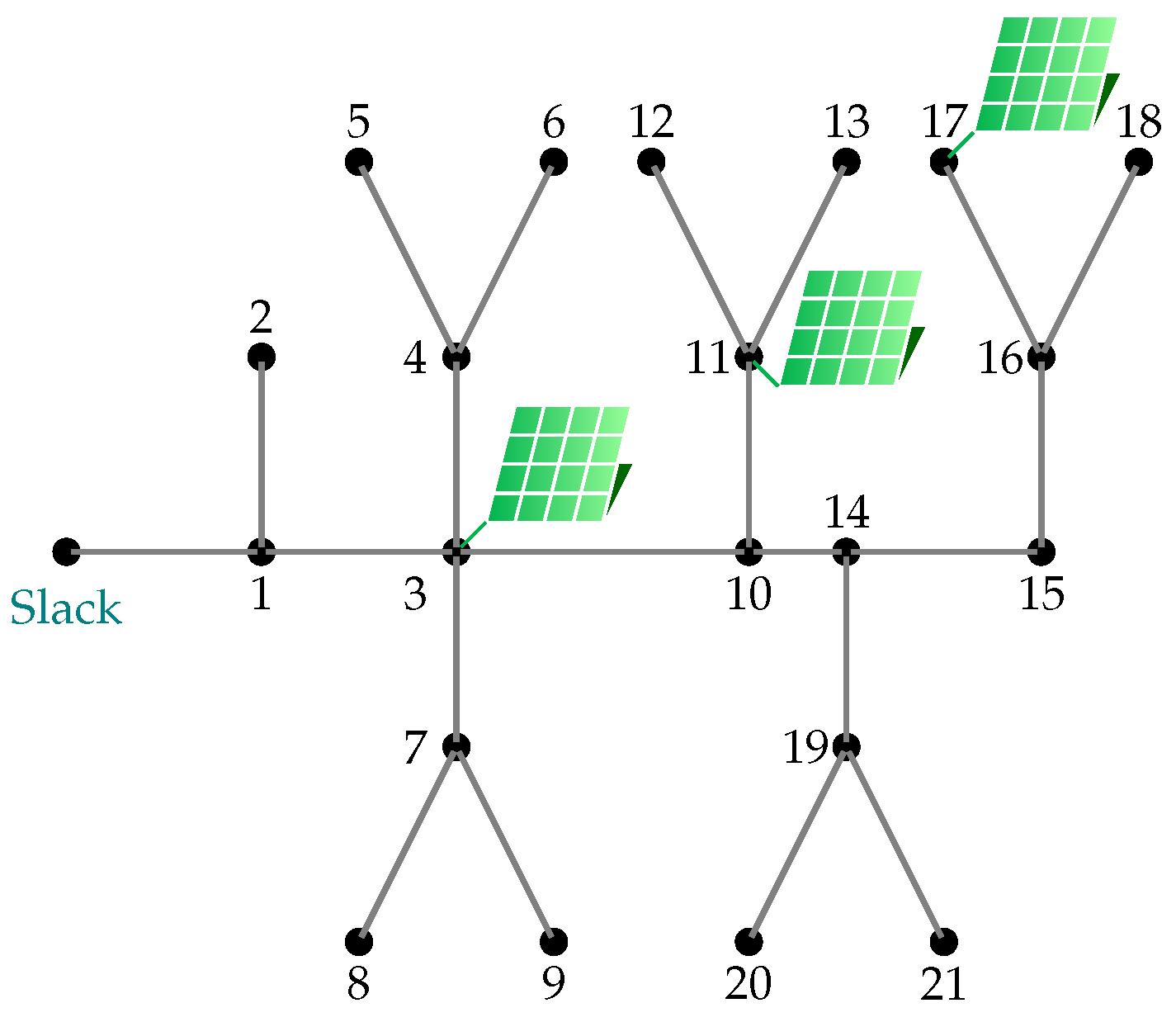
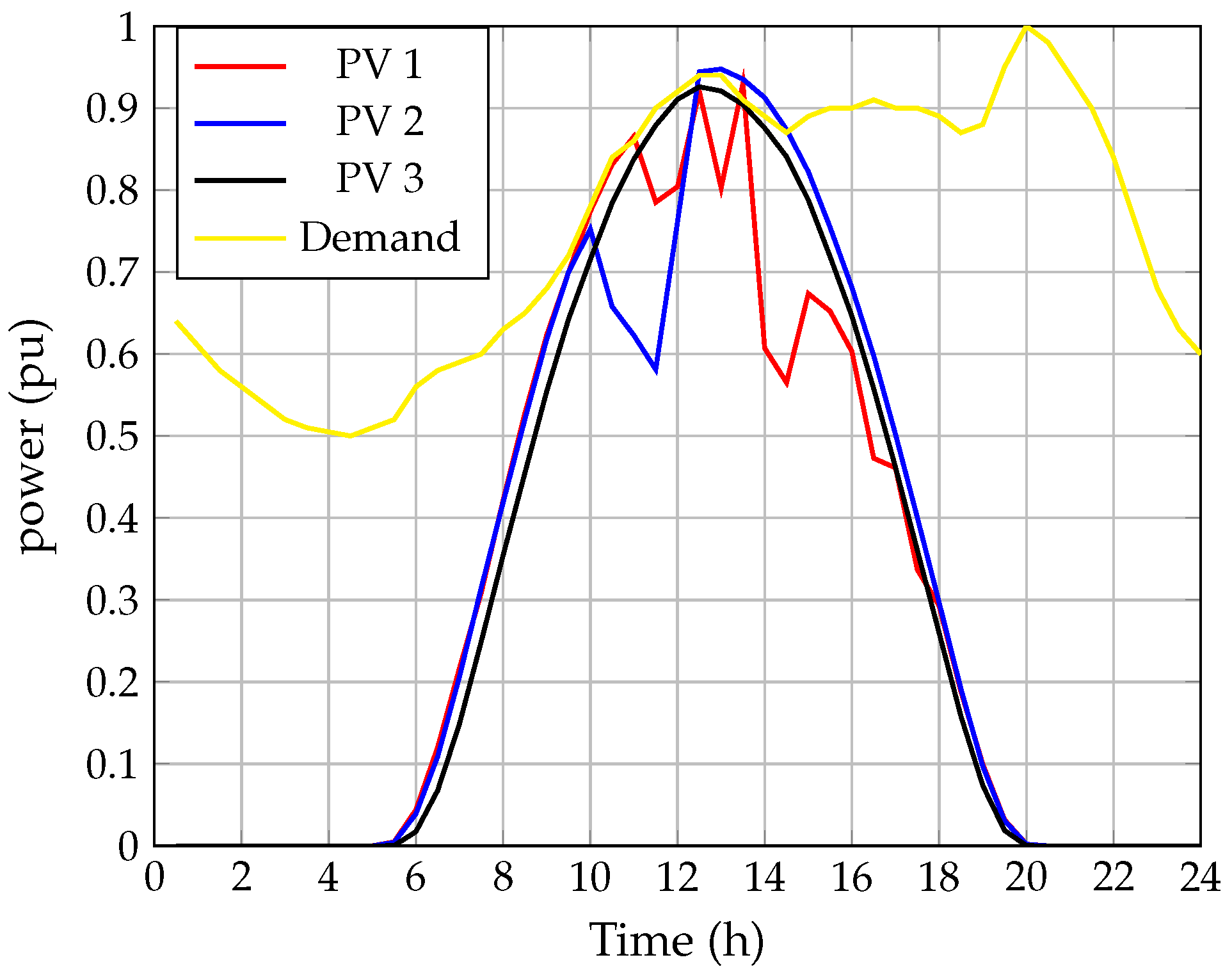
4.1. Bipolar DC 21-Bus System
4.2. Numerical Validation and Analysis of Results
4.2.1. Deterministic Model
- The proposed RQCA reaches the global optimum for three levels of capacity of the PV generators with the solutions of kW, kW, and kW for 0%, 50%, and 100% of the capacity PV rating, respectively. The VSA algorithm shows numerical solutions similar to the proposed RQCA model. However, the proposed model always reaches the global optimum in each evaluation. This is because the proposed RQCA model is convex; hence, it finds the global optimum of the problem. By contrast, the VSA algorithm and other algorithms do not always reach the same solution, as these methods cannot guarantee a global solution to the problem.
- As the capacity level of the PVs increases, the solutions of the metaheuristic algorithms move away from the optimum solution. This is because these algorithms contain a random nature and simple evolution rules. In addition, the SCA and BHO algorithms present less sophisticated rules than the VSA algorithm, and for this reason, their performances are inferior to the VSA algorithm.
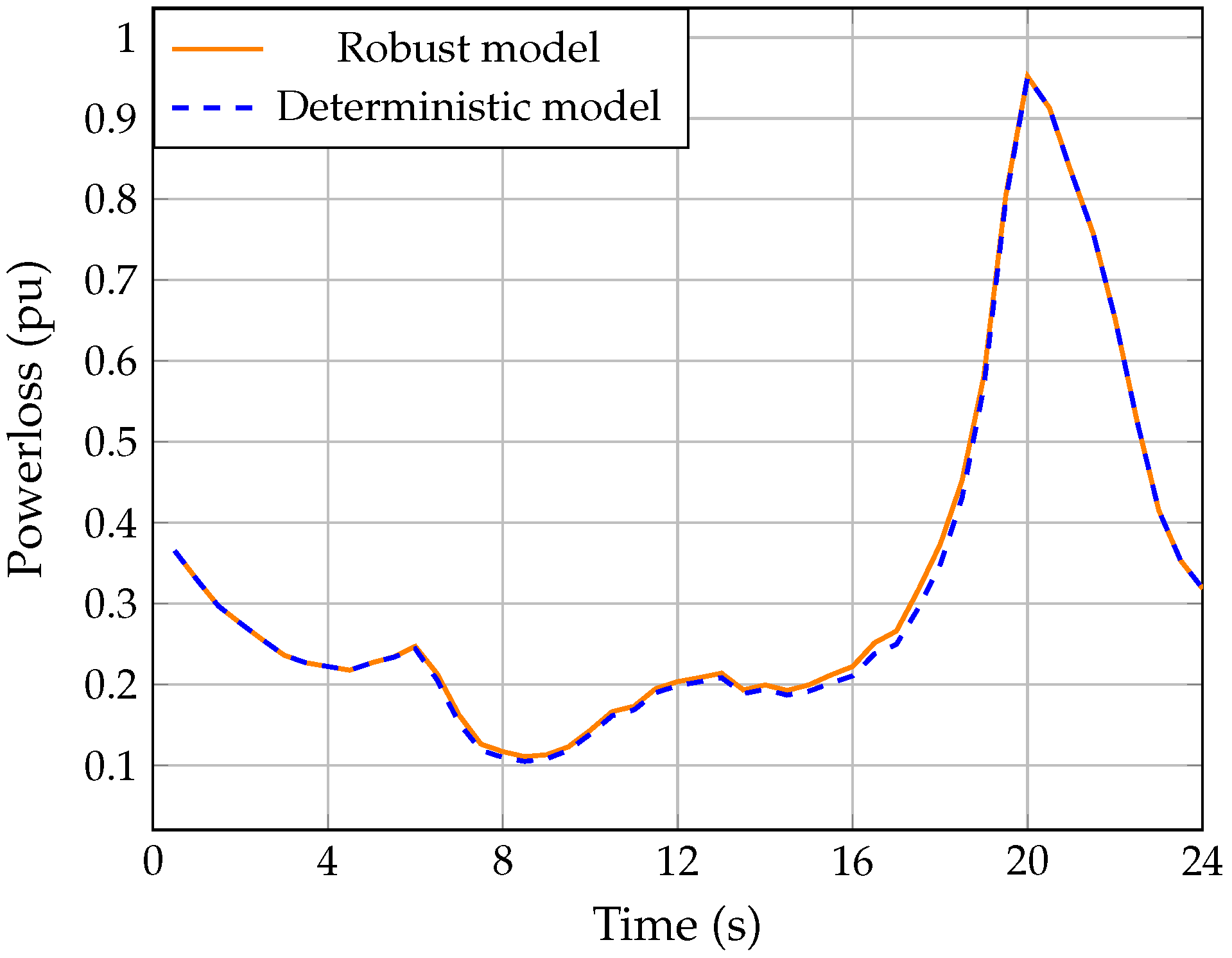
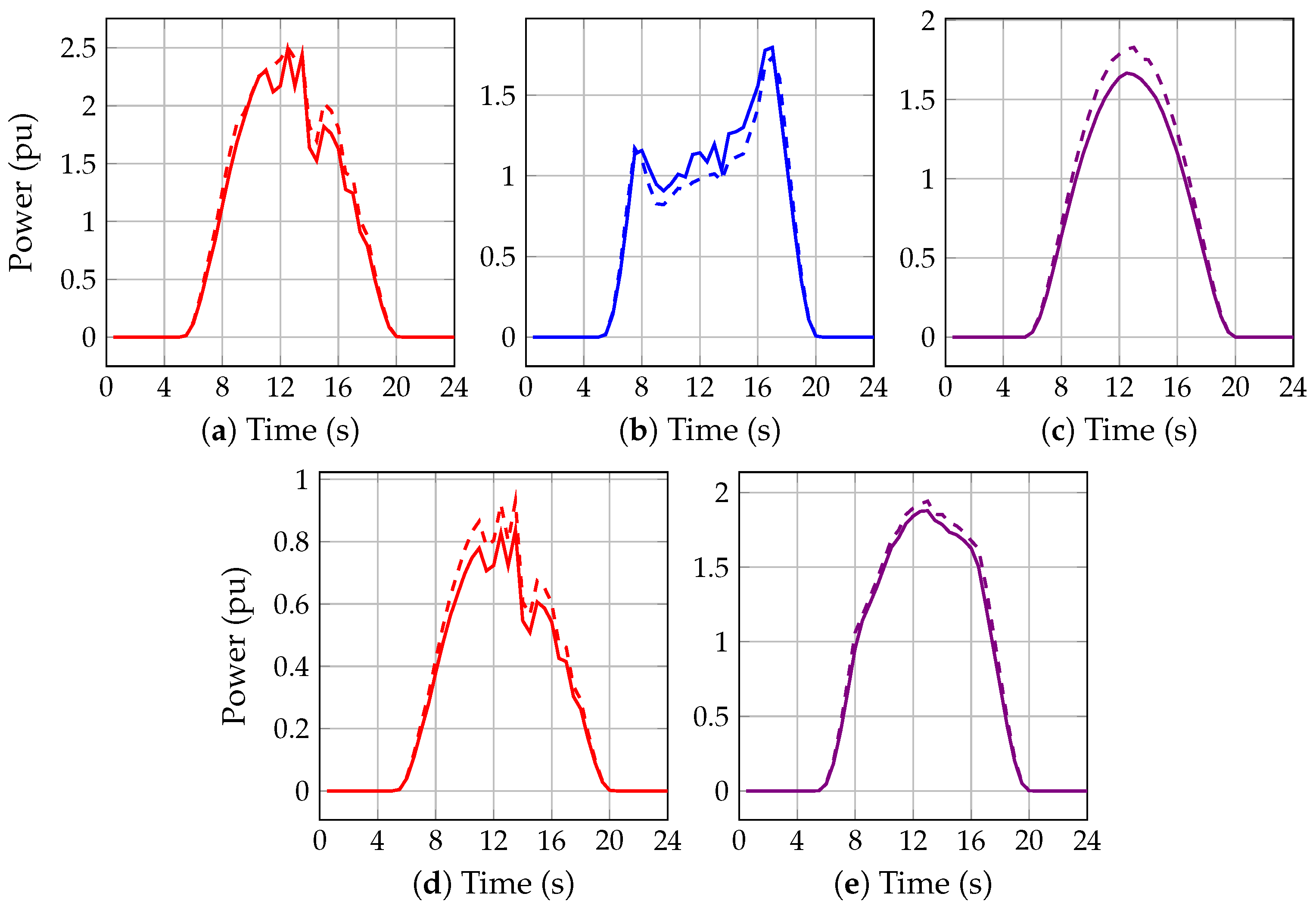
4.2.2. Robust Model
5. Conclusions
- i.
- In the proposed optimization approach, uncertainties in power available for the PV generators were considered. To solve this problem, the proposed methodology was transformed to a min–max problem, in which the problem solution is under worst-case cost, satisfying the set of constraints. This transformation becomes the proposed model in a robust model.
- ii.
- The proposed model was compared to three metaheuristic methods to show its effectiveness and validity, where it consistently achieved better solutions than the other methods.
- iii.
- The proposed solution methodology was evaluated in a scenario of 24 h using deterministic and robust models. The results show that, in the scenario of 24 h, the behavior of the power losses was similar between models. The results for the power losses in the proposed robust model were higher than the deterministic model. These results are expected since the robust mode works in the worst-case scenario.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| Indices | |
| Superscripts associated with poles. | |
| 0 | Superscripts associated with the initial value of linearization. |
| t | Superscripts associated with the recursive counter. |
| Subscripts associated with nodes. | |
| h | Subscripts associated with period. |
| Parameters | |
| Objective function value regarding the total power losses in the bipolar DC network (W). | |
| Value of the conductance matrix that associates nodes j and k between poles r and s (S). | |
| Bipolar constant power consumption connected between positive and negative poles at node k, at time h (W). | |
| Monopolar constant power consumption at node k, at time h, for the positive pole p (W). | |
| Monopolar constant power consumption at node k, at time h, for the negative pole n (W). | |
| Minimum current injection with a generator connected at node k, at time h, for the neutral pole o (A). | |
| Minimum current injection with a generator connected at node k, at time h, for the negative pole n (A). | |
| Maximum power injection with a generator connected at node k, at time h, for the positive pole p (A). | |
| Maximum power injection with a generator connected at node k, at time h, for the neutral pole o (A). | |
| Maximum power injection with a generator connected at node k, at time h, for the negative pole n (A). | |
| Minimum voltage value allowed at node k for the positive pole p (V). | |
| Maximum voltage value allowed at node k for the positive pole p (V). | |
| Minimum voltage value allowed at node k for the negative pole n (V). | |
| Maximum voltage value allowed at node k for the negative pole n (V). | |
| Nominal voltage at the substation terminal (V). | |
| Binary variable used to define the uncertainty set at node k, at time t, for the negative pole n. | |
| Sets | |
| Set that contains all the poles in the network, i.e., . | |
| Set that contains all nodes in the network. | |
| Set that contains all periods in the network. | |
| Variables | |
| Voltage value at node j, at time h, for the th pole (V). | |
| Voltage value at node k, at time h, for the th pole (V). | |
| Current injection in the slack source at node k, at time h, for the positive pole p (A). | |
| Current injection in the slack source at node k, at time h, for the neutral pole o (A). | |
| Current injection in the slack source at node k, at time h, for the negative pole n (A). | |
| Current injection by the PV system at node k, at time h, for the positive pole p (A). | |
| Current injection by the PV system at node k, at time h, for the neutral pole o (A). | |
| Current injection by the PV system at node k, at time h, for the negative pole n (A). | |
| Current consumption at node k, at time h, for the positive pole p (A). | |
| Current consumption at node k, at time h, for the neutral pole p (A). | |
| Current consumption at node k, at time h, for the negative pole p (A). | |
| Current consumption of a load connected between positive and negative poles at node k, at time h (A). | |
| Current drained to the ground at node k, at time h (A). | |
| Voltage value at node k, at time h, for the positive pole p (V). | |
| Voltage value at node k, at time h, for the neutral pole o (V). | |
| Voltage value at node k, at time h, for the negative pole n (V). | |
| Minimum current injection with a generator connected at node k, at time h, for the positive pole p (A). | |
| Power injection of the PV system at node k, at time t, for the positive pole p (W). | |
| Power injection of the PV system at node k, at time t, for the negative pole n (W). | |
| Power deviation of the PV system at node k, at time t, for the positive pole p (W). | |
| Power deviation of the PV system at node k, at time t, for the negative pole n (W). | |
| Binary variable used to define the uncertainty set at node k, at time t, for the positive pole p. | |
| Binary variable used to define the uncertainty set at node k, at time t, for the negative pole n. | |
References
- Mishra, S.; Das, D.; Paul, S. A comprehensive review on power distribution network reconfiguration. Energy Syst. 2016, 8, 227–284. [Google Scholar] [CrossRef]
- Prakash, K.; Lallu, A.; Islam, F.; Mamun, K. Review of Power System Distribution Network Architecture. In Proceedings of the 2016 3rd Asia-Pacific World Congress on Computer Science and Engineering (APWC on CSE), Nadi, Fiji, 5–6 December 2016; IEEE: Piscataway, NJ, USA, 2016. [Google Scholar] [CrossRef]
- Mousavizadeh, S.; Bolandi, T.G.; Alahyari, A.; Dadashzade, A.; Haghifam, M.R. A novel unbalanced power flow analysis in active AC-DC distribution networks considering PWM convertors and distributed generations. Int. J. Electr. Power Energy Syst. 2022, 138, 107938. [Google Scholar] [CrossRef]
- Geng, Q.; Hu, Y.; He, J.; Zhou, Y.; Zhao, W.; Xu, X.; Wei, W. Optimal operation of AC–DC distribution network with multi park integrated energy subnetworks considering flexibility. IET Renew. Power Gener. 2020, 14, 1004–1019. [Google Scholar] [CrossRef]
- Gao, S.; Liu, S.; Liu, Y.; Zhao, X.; Song, T.E. Flexible and Economic Dispatching of AC/DC Distribution Networks Considering Uncertainty of Wind Power. IEEE Access 2019, 7, 100051–100065. [Google Scholar] [CrossRef]
- Garces, A. Uniqueness of the power flow solutions in low voltage direct current grids. Electr. Power Syst. Res. 2017, 151, 149–153. [Google Scholar] [CrossRef]
- Montoya, O.D.; Serra, F.M.; Angelo, C.H.D. On the Efficiency in Electrical Networks with AC and DC Operation Technologies: A Comparative Study at the Distribution Stage. Electronics 2020, 9, 1352. [Google Scholar] [CrossRef]
- Montoya, O.D.; Medina-Quesada, Á.; Hernández, J.C. Optimal Pole-Swapping in Bipolar DC Networks Using Discrete Metaheuristic Optimizers. Electronics 2022, 11, 2034. [Google Scholar] [CrossRef]
- Noreña, L.F.G.; Rivera, O.D.G.; Toro, J.A.O.; Paja, C.A.R.; Cabal, M.A.R. Metaheuristic Optimization Methods for Optimal Power Flow Analysis in DC Distribution Networks. Trans. Energy Syst. Eng. Appl. 2020, 1, 13–31. [Google Scholar] [CrossRef]
- Mackay, L.; Dimou, A.; Guarnotta, R.; Morales-Espania, G.; Ramirez-Elizondo, L.; Bauer, P. Optimal power flow in bipolar DC distribution grids with asymmetric loading. In Proceedings of the 2016 IEEE International Energy Conference (ENERGYCON), Piscataway, NJ, USA, 4–8 April 2016; IEEE: Piscataway, NJ, USA, 2016. [Google Scholar] [CrossRef]
- Lee, J.O.; Kim, Y.S.; Jeon, J.H. Optimal power flow for bipolar DC microgrids. Int. J. Electr. Power Energy Syst. 2022, 142, 108375. [Google Scholar] [CrossRef]
- Medina-Quesada, Á.; Montoya, O.D.; Hernández, J.C. Derivative-Free Power Flow Solution for Bipolar DC Networks with Multiple Constant Power Terminals. Sensors 2022, 22, 2914. [Google Scholar] [CrossRef] [PubMed]
- Chew, B.S.H.; Xu, Y.; Wu, Q. Voltage Balancing for Bipolar DC Distribution Grids: A Power Flow Based Binary Integer Multi-Objective Optimization Approach. IEEE Trans. Power Syst. 2019, 34, 28–39. [Google Scholar] [CrossRef]
- Löfberg, J. Automatic robust convex programming. Optim. Methods Softw. 2012, 27, 115–129. [Google Scholar] [CrossRef]
- Mackay, L.; Guarnotta, R.; Dimou, A.; Morales-Espana, G.; Ramirez-Elizondo, L.; Bauer, P. Optimal power flow for unbalanced bipolar DC distribution grids. IEEE Access 2018, 6, 5199–5207. [Google Scholar] [CrossRef]
- Lee, J.O.; Kim, Y.S.; Moon, S.I. Current injection power flow analysis and optimal generation dispatch for bipolar DC microgrids. IEEE Trans. Smart Grid 2020, 12, 1918–1928. [Google Scholar] [CrossRef]
- Jat, C.K.; Dave, J.; Van Hertem, D.; Ergun, H. Unbalanced OPF Modelling for Mixed Monopolar and Bipolar HVDC Grid Configurations. arXiv 2022, arXiv:2211.06283. [Google Scholar]
- Montoya, O.D.; Gil-González, W.; Hernández, J.C. Optimal Power Flow Solution for Bipolar DC Networks Using a Recursive Quadratic Approximation. Energies 2023, 16, 589. [Google Scholar] [CrossRef]
- Kwok, Y.K. Applied Complex Variables for Scientists and Engineers; Cambridge University Press: Cambridge, UK, 2010. [Google Scholar]
- Montoya, O.D.; Zishan, F.; Giral-Ramírez, D.A. Recursive Convex Model for Optimal Power Flow Solution in Monopolar DC Networks. Mathematics 2022, 10, 3649. [Google Scholar] [CrossRef]
- Garces, A. On the Convergence of Newton’s Method in Power Flow Studies for DC Microgrids. IEEE Trans. Power Appar. Syst. 2018, 33, 5770–5777. [Google Scholar] [CrossRef]
- Radiation data, S.S. Solar Training. Available online: http://www.soda-pro.com/ (accessed on 28 March 2022).
- Löfberg, J. YALMIP: A Toolbox for Modeling and Optimization in MATLAB. In Proceedings of the 2004 IEEE International Conference on Robotics and Automation, New Orleans, LA, USA, 26 April–1 May 2004. [Google Scholar]
- Gurobi Optimization, LLC. Gurobi Optimizer Reference Manual. 2022. Available online: http://www.gurobi.com (accessed on 5 January 2023).
- Gabis, A.B.; Meraihi, Y.; Mirjalili, S.; Ramdane-Cherif, A. A comprehensive survey of sine cosine algorithm: Variants and applications. Artif. Intell. Rev. 2021, 54, 5469–5540. [Google Scholar] [CrossRef] [PubMed]
- Doğan, B.; Ölmez, T. Vortex search algorithm for the analog active filter component selection problem. AEU-Int. J. Electron. Commun. 2015, 69, 1243–1253. [Google Scholar] [CrossRef]
- Kumar, S.; Datta, D.; Singh, S.K. Black Hole Algorithm and Its Applications. In Studies in Computational Intelligence; Springer International Publishing: Berlin/Heidelberg, Germany, 2014; pp. 147–170. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model Variables | |||
|---|---|---|---|
| Variable | Number | Variable | Number |
| Objective function | 1 | Voltages | |
| Currents | Powers | ||
| Total variables | |||
| Model equalities and inequalities | |||
| Equalities | Inequalities | ||
| Total eq. and ineq. | |||
| Node k | Node m | (Ω) | (kW) | (kW) | (kW) |
|---|---|---|---|---|---|
| 1 | 2 | 0.053 | 70 | 100 | 0 |
| 1 | 3 | 0.054 | 0 | 0 | 0 |
| 3 | 4 | 0.054 | 36 | 40 | 120 |
| 4 | 5 | 0.063 | 4 | 0 | 0 |
| 4 | 6 | 0.051 | 36 | 0 | 0 |
| 3 | 7 | 0.037 | 0 | 0 | 0 |
| 7 | 8 | 0.079 | 32 | 50 | 0 |
| 7 | 9 | 0.072 | 80 | 0 | 100 |
| 3 | 10 | 0.053 | 0 | 10 | 0 |
| 10 | 11 | 0.038 | 45 | 30 | 0 |
| 11 | 12 | 0.079 | 68 | 70 | 0 |
| 11 | 13 | 0.078 | 10 | 0 | 75 |
| 10 | 14 | 0.083 | 0 | 0 | 0 |
| 14 | 15 | 0.065 | 22 | 30 | 0 |
| 15 | 16 | 0.064 | 23 | 10 | 0 |
| 16 | 17 | 0.074 | 43 | 0 | 60 |
| 16 | 18 | 0.081 | 34 | 60 | 0 |
| 14 | 19 | 0.078 | 9 | 15 | 0 |
| 19 | 20 | 0.084 | 21 | 10 | 50 |
| 19 | 21 | 0.082 | 21 | 20 | 0 |
| Label | Node | Pole | Capacity (kW) | Label | Node | Pole | Capacity (kW) |
|---|---|---|---|---|---|---|---|
| PV 1 | 3 | p | 300 | PV 3 | 17 | p | 200 |
| 3 | n | 100 | 17 | n | 300 | ||
| PV 2 | 11 | p | 400 |
| PV Capacity | Method | Min. (pu) | Mean (pu) | Max. (pu) | Std. Dev. (pu) | Average Time (s) |
|---|---|---|---|---|---|---|
| 0% | SCA | 0.9542368 | 0.9542368 | 0.9542368 | 4.6461 | |
| VSA | 0.9542368 | 0.9542368 | 0.9542368 | 4.1939 | ||
| BHO | 0.9542368 | 0.9542368 | 0.9542368 | 9.2526 | ||
| RQCA | 0.9542367 | 0.9542367 | 0.9542368 | < | 6.0529 | |
| 50% | SCA | 0.3157859 | 0.3299539 | 0.3441219 | 4.5489 | |
| VSA | 0.3152253 | 0.3153301 | 0.3164762 | 5.2673 | ||
| BHO | 0.3216582 | 0.3269265 | 0.3312492 | 9.1321 | ||
| RQCA | 0.3152552 | 0.3152552 | 0.3152552 | < | 5.8552 | |
| 100% | SCA | 0.2306334 | 0.2529280 | 0.2854381 | 4.3451 | |
| VSA | 0.2298536 | 0.2298567 | 0.2298805 | 5.0126 | ||
| BHO | 0.2306558 | 0.2317489 | 0.2327831 | 9.1541 | ||
| RQCA | 0.2298554 | 0.2298554 | 0.2298554 | < | 6.1220 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Montoya, O.D.; Gil-González, W.; Hernández, J.C. Optimal Scheduling of Photovoltaic Generators in Asymmetric Bipolar DC Grids Using a Robust Recursive Quadratic Convex Approximation. Machines 2023, 11, 177. https://doi.org/10.3390/machines11020177
Montoya OD, Gil-González W, Hernández JC. Optimal Scheduling of Photovoltaic Generators in Asymmetric Bipolar DC Grids Using a Robust Recursive Quadratic Convex Approximation. Machines. 2023; 11(2):177. https://doi.org/10.3390/machines11020177
Chicago/Turabian StyleMontoya, Oscar Danilo, Walter Gil-González, and Jesus C. Hernández. 2023. "Optimal Scheduling of Photovoltaic Generators in Asymmetric Bipolar DC Grids Using a Robust Recursive Quadratic Convex Approximation" Machines 11, no. 2: 177. https://doi.org/10.3390/machines11020177
APA StyleMontoya, O. D., Gil-González, W., & Hernández, J. C. (2023). Optimal Scheduling of Photovoltaic Generators in Asymmetric Bipolar DC Grids Using a Robust Recursive Quadratic Convex Approximation. Machines, 11(2), 177. https://doi.org/10.3390/machines11020177