
Towards the Design of a User-Friendly Chimney-Cleaning Robot

 , , ,
, , ,  and
and 
Abstract
:1. Introduction
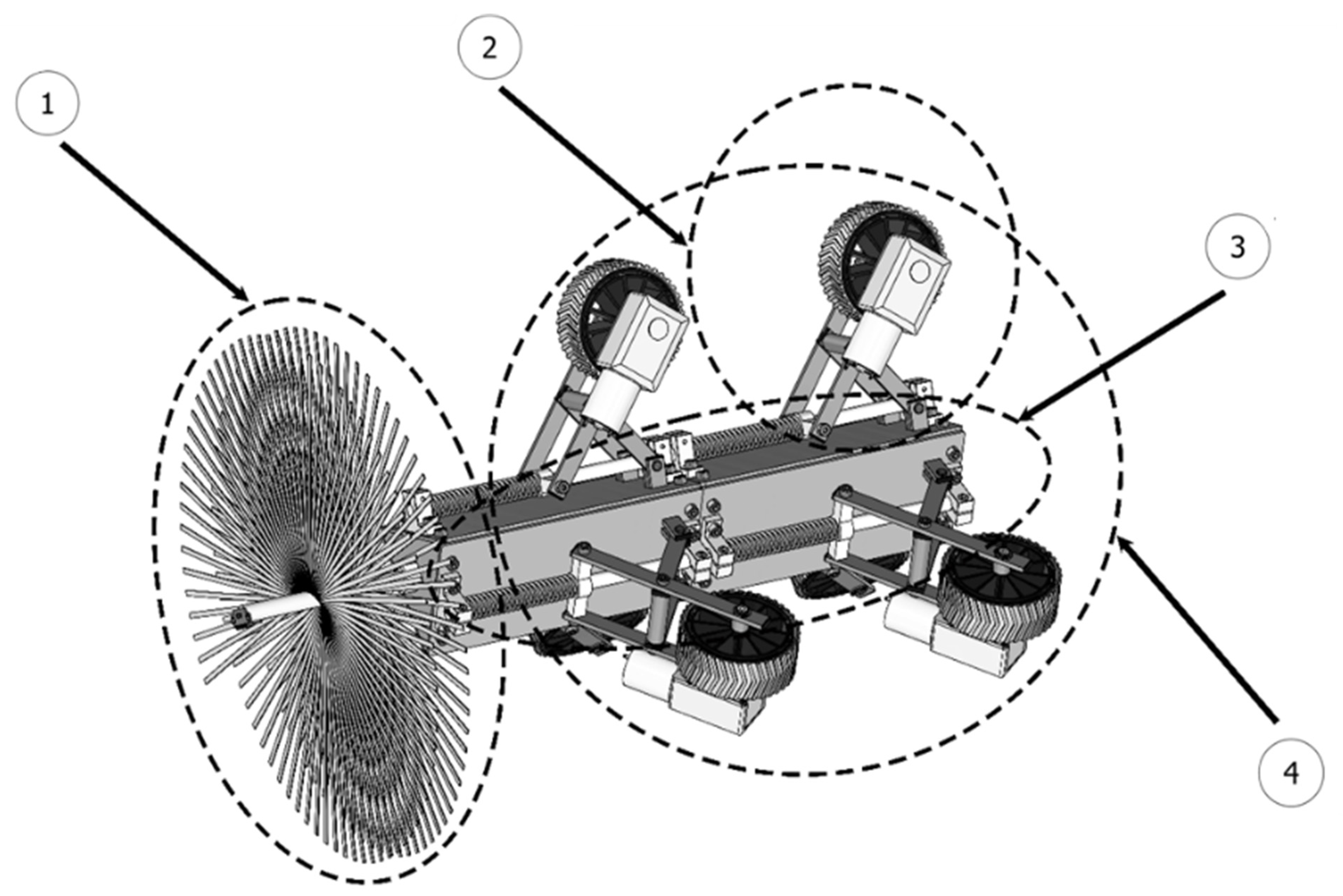
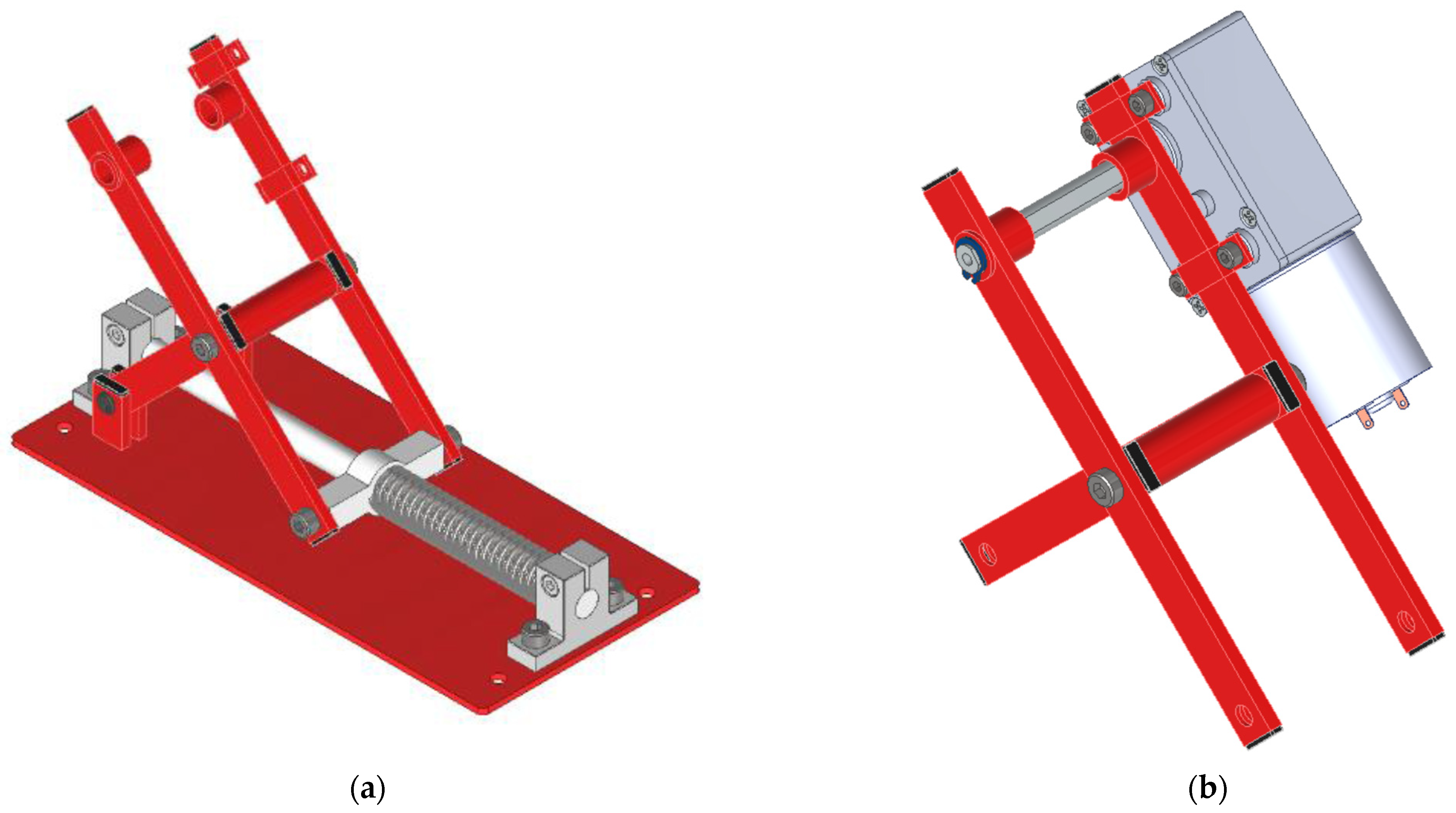
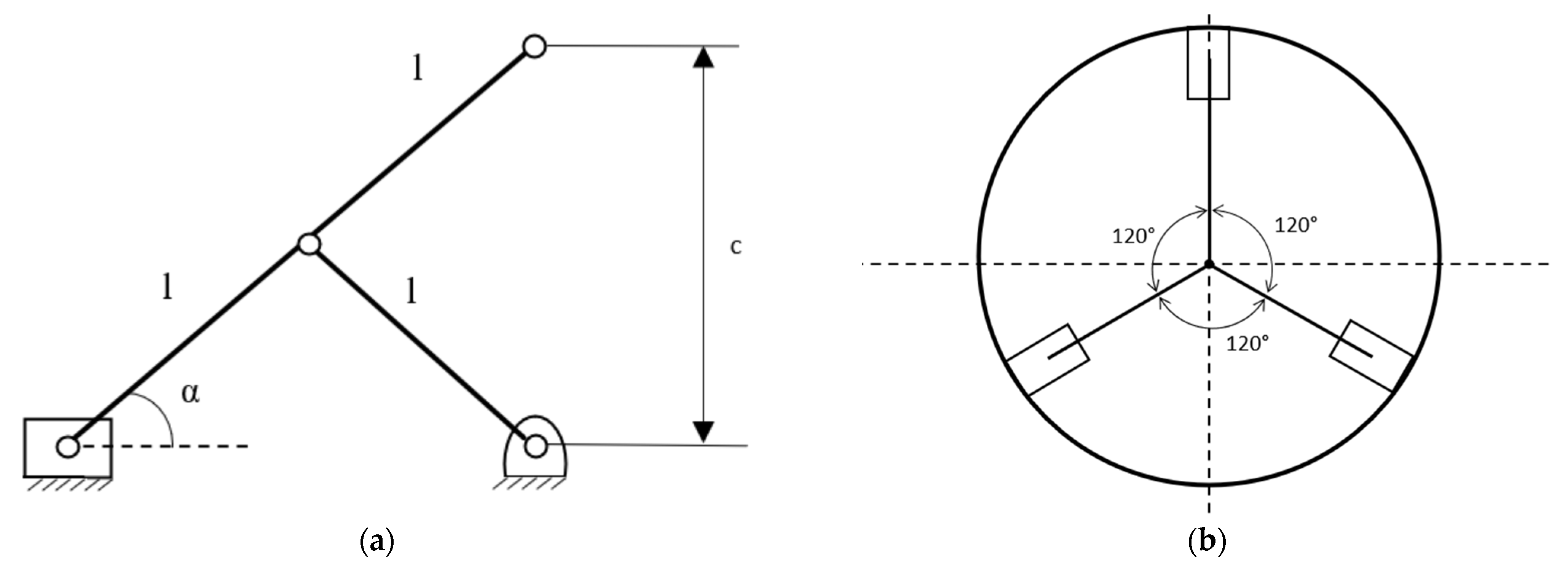
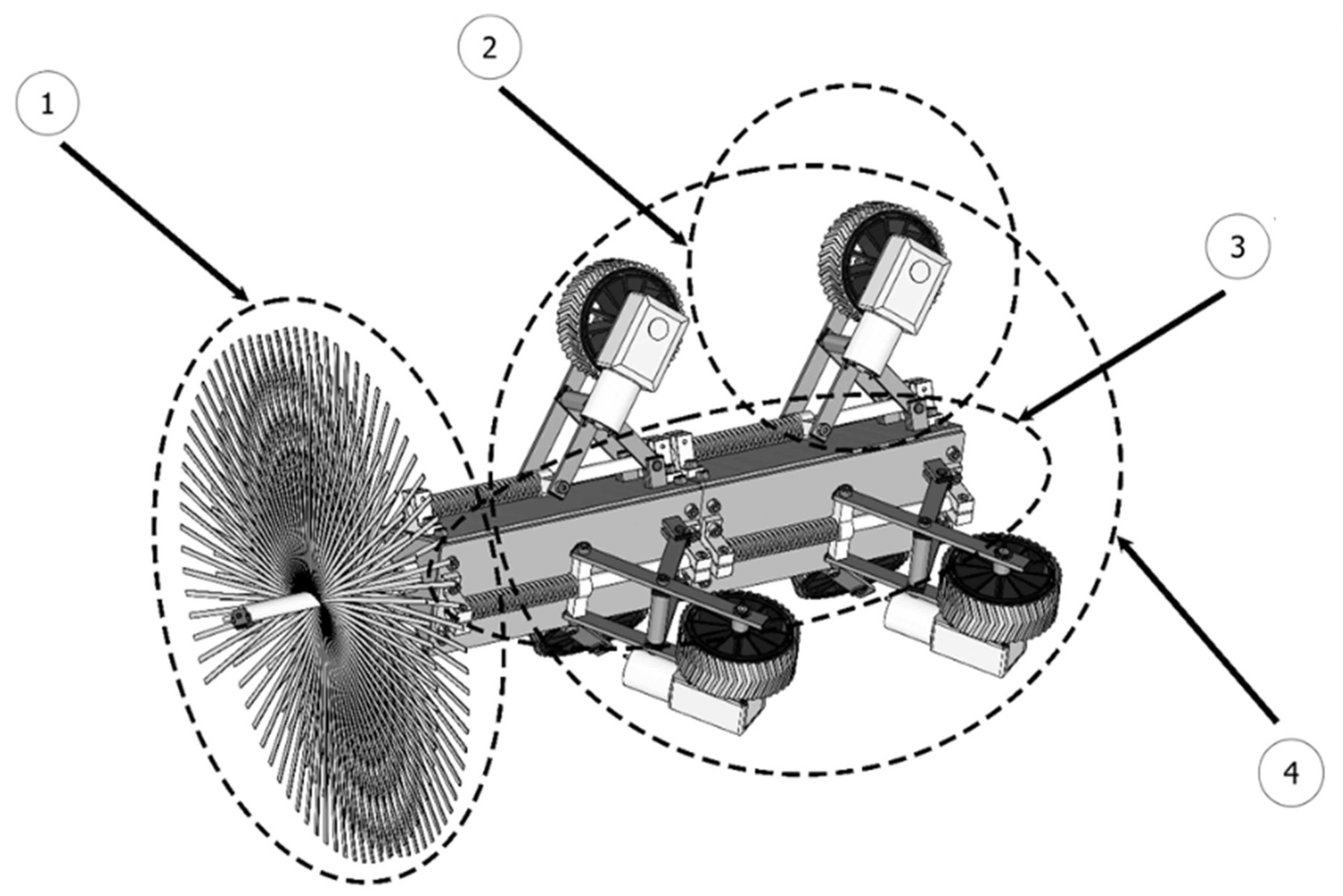
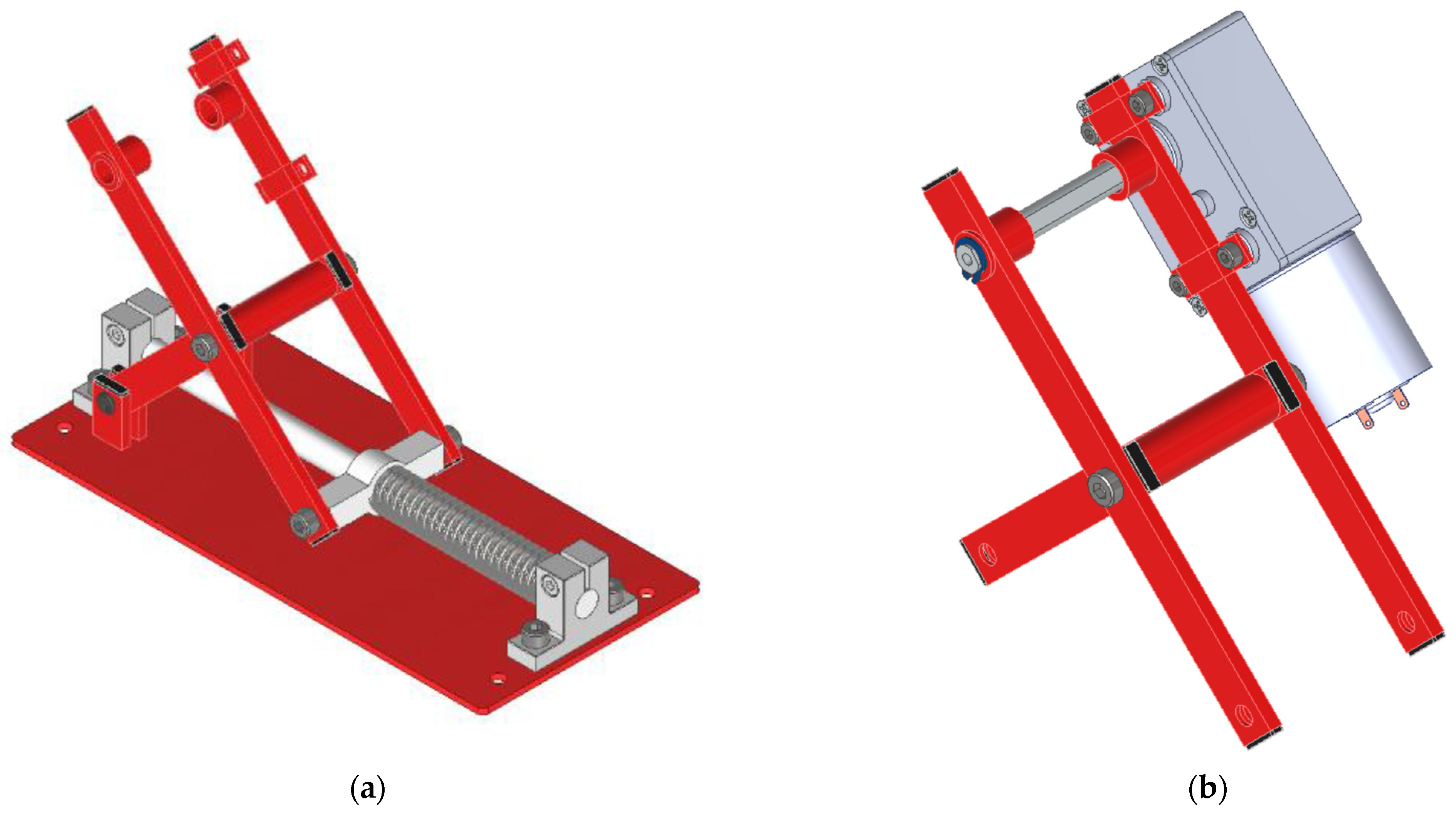
2. Chimney Cleaning Design
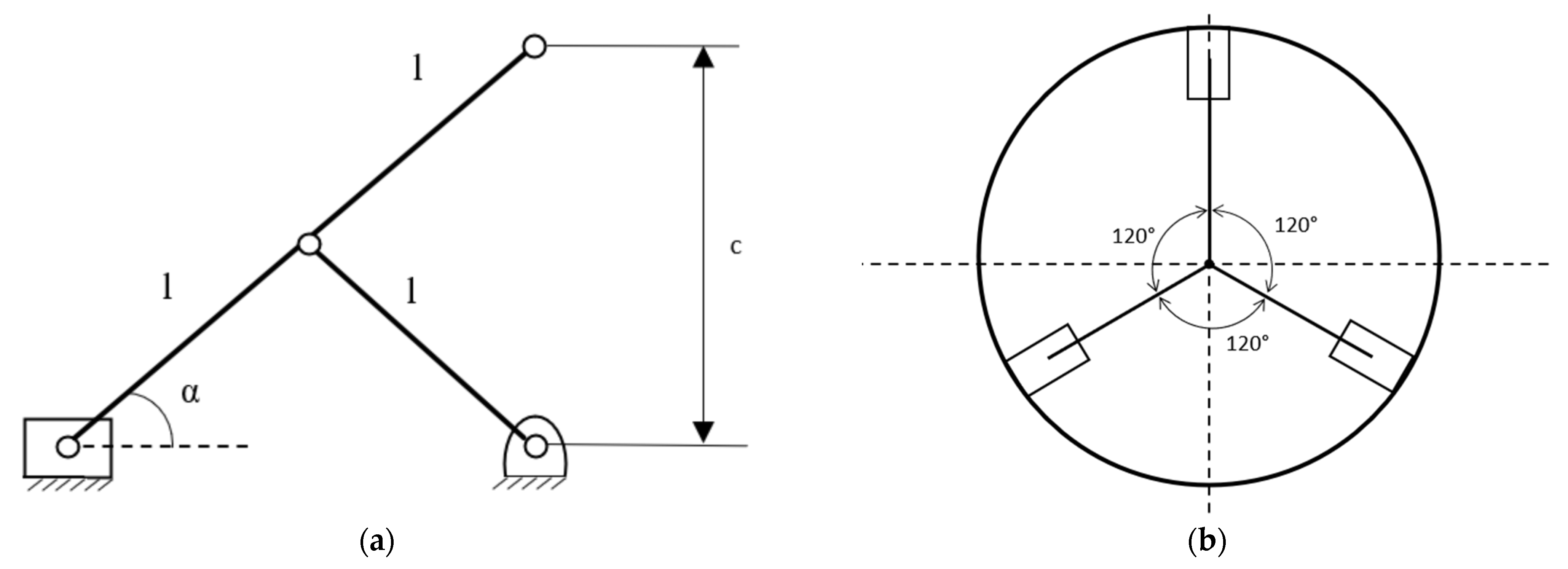
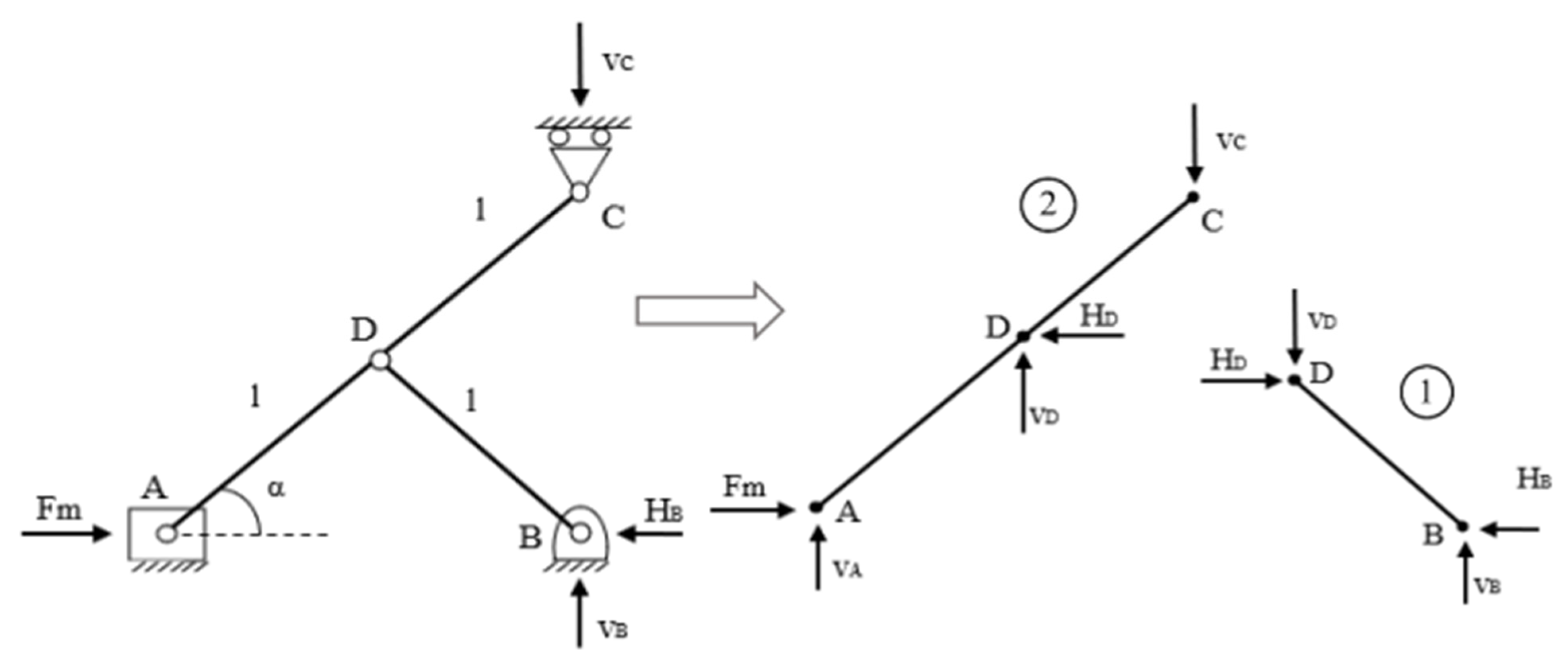
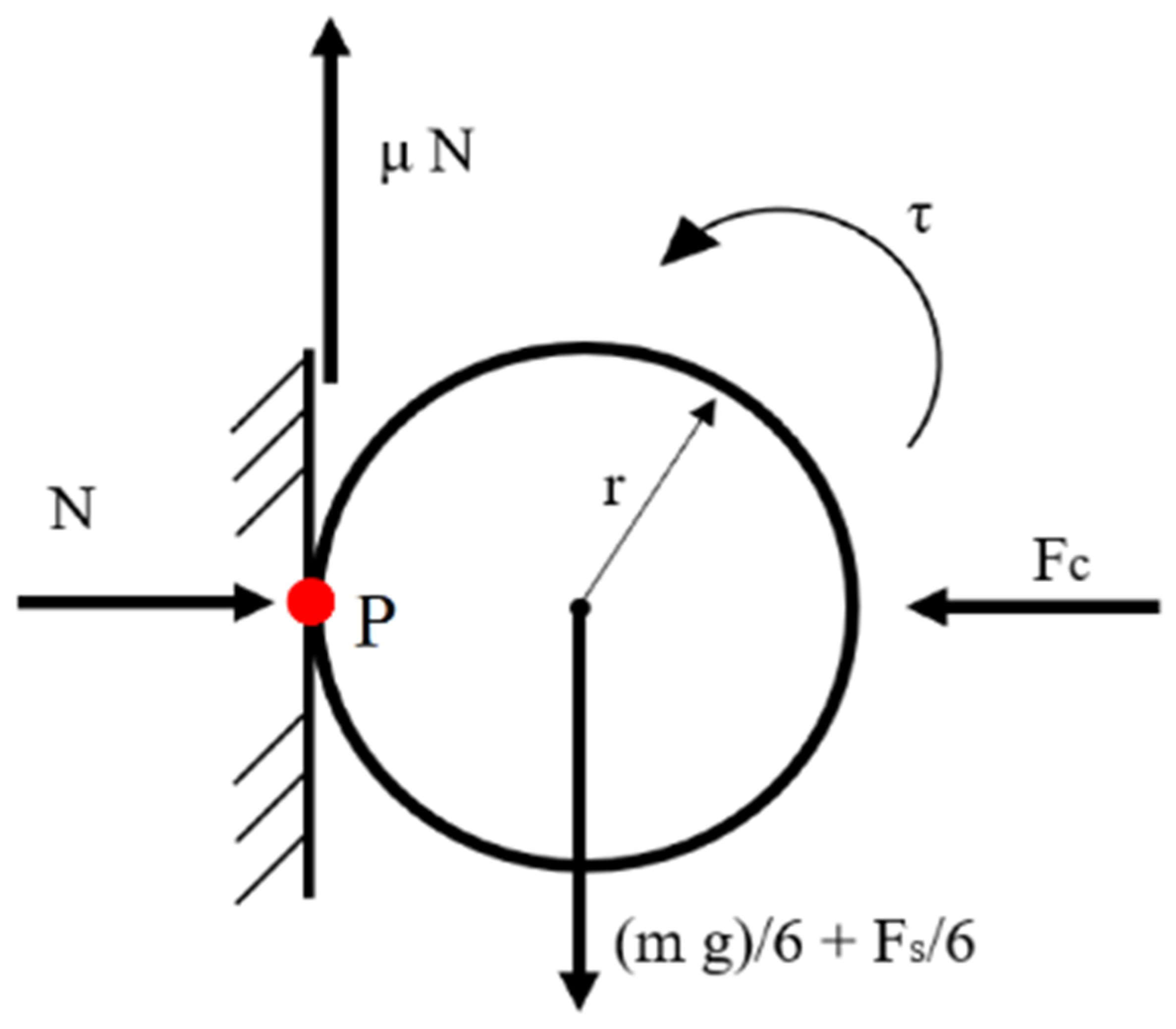
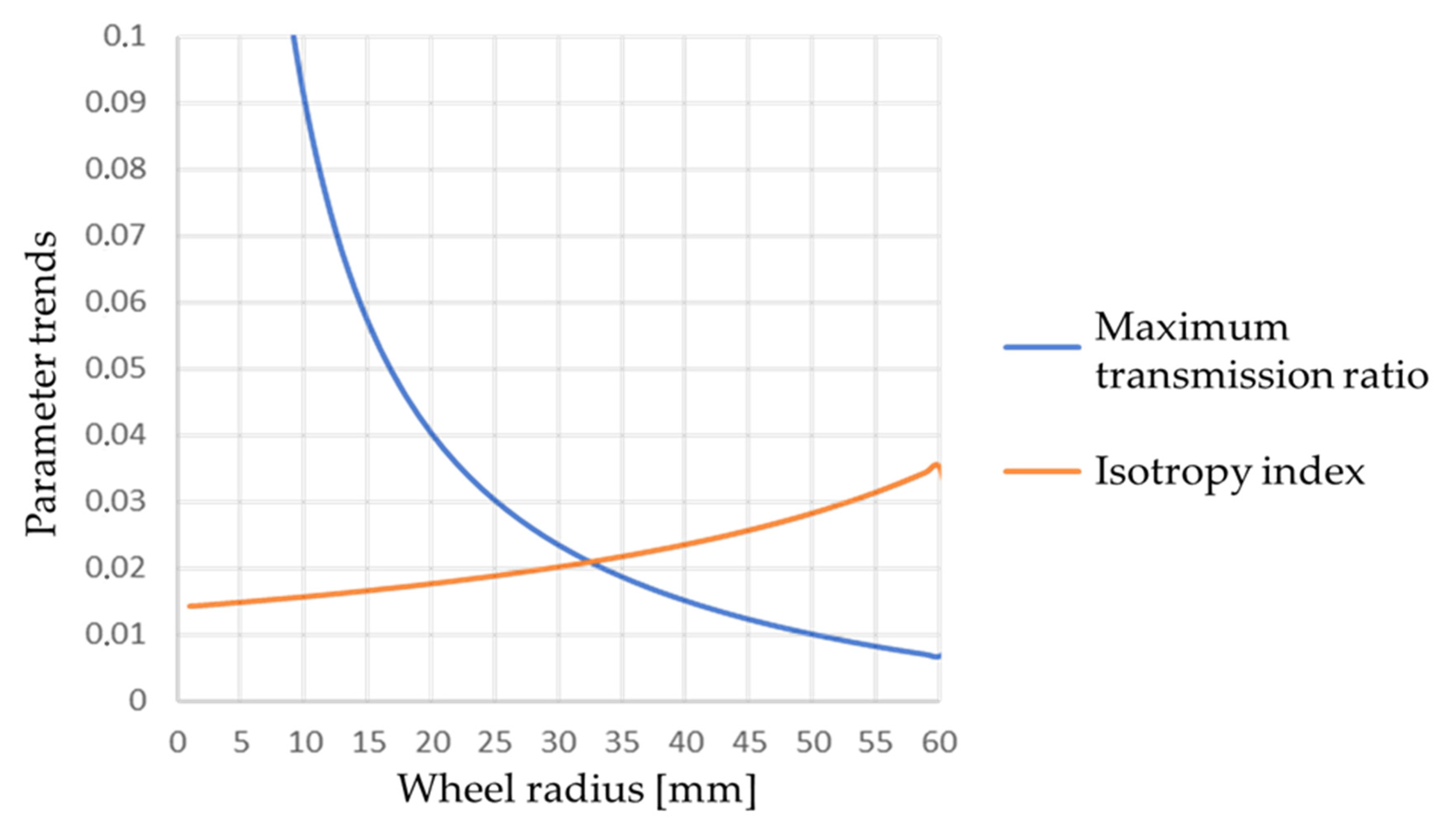
Robotic Structure
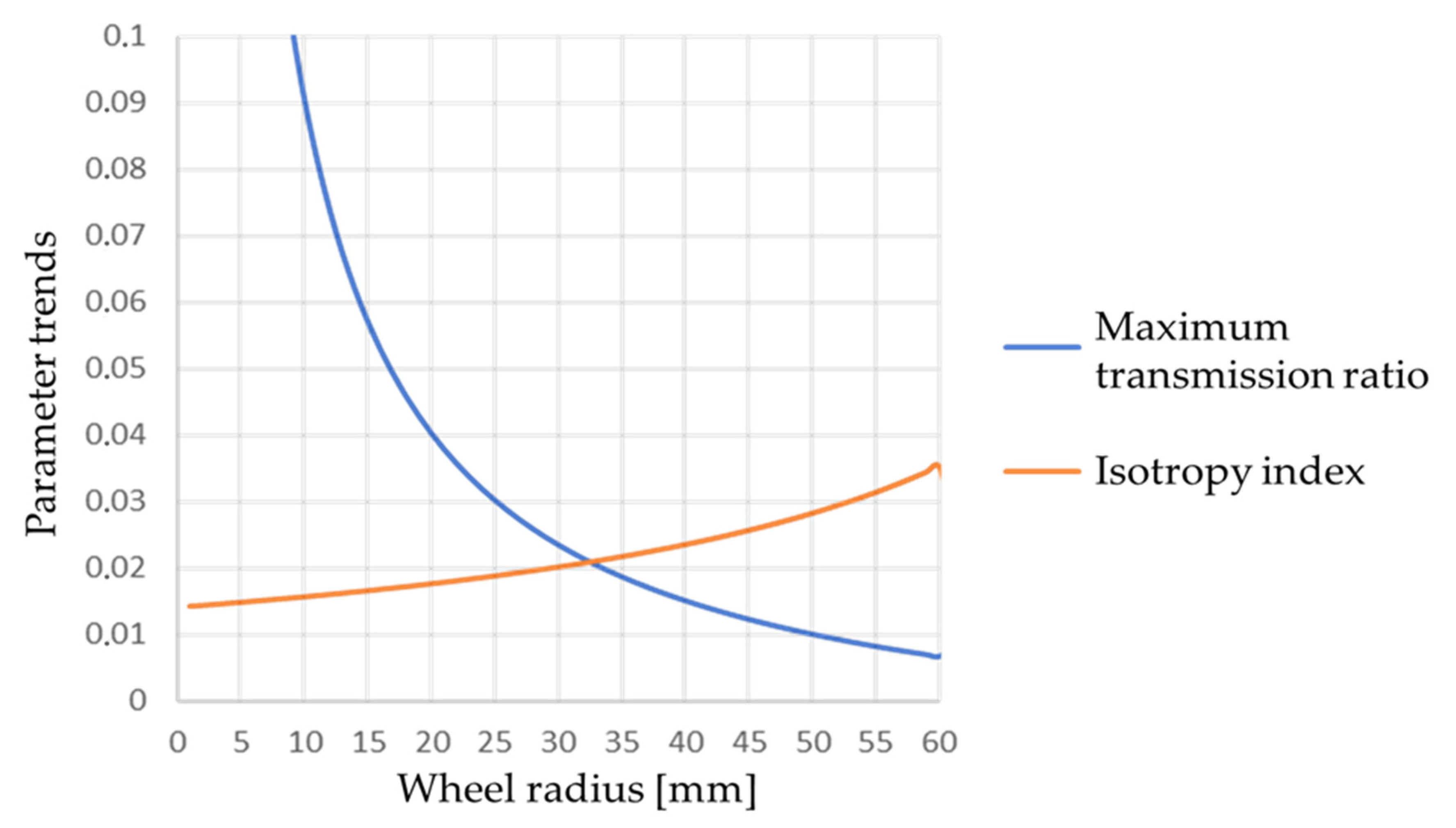
- maximize the transmission force;
- ensure isotropy of movement in the three directions.
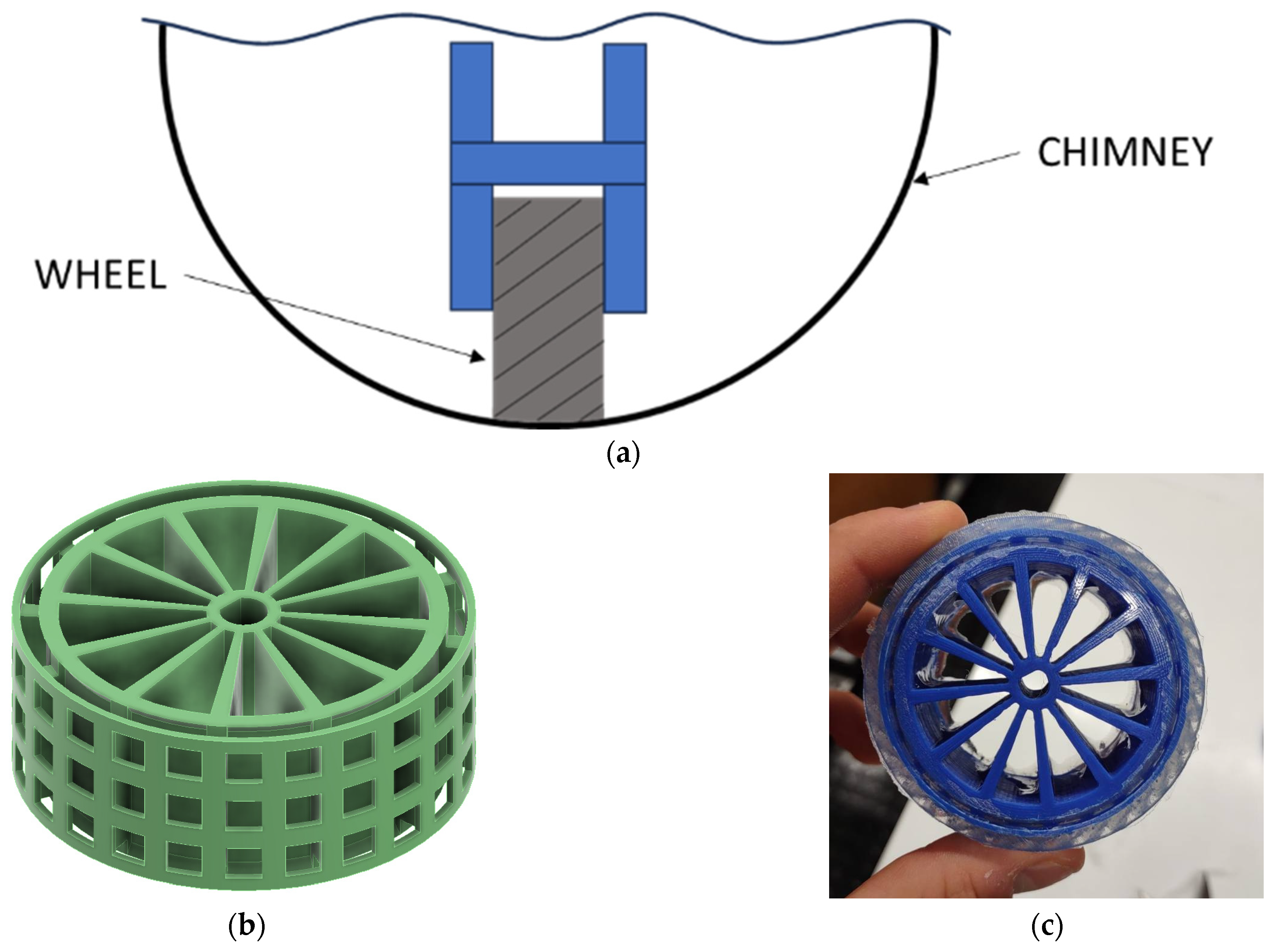
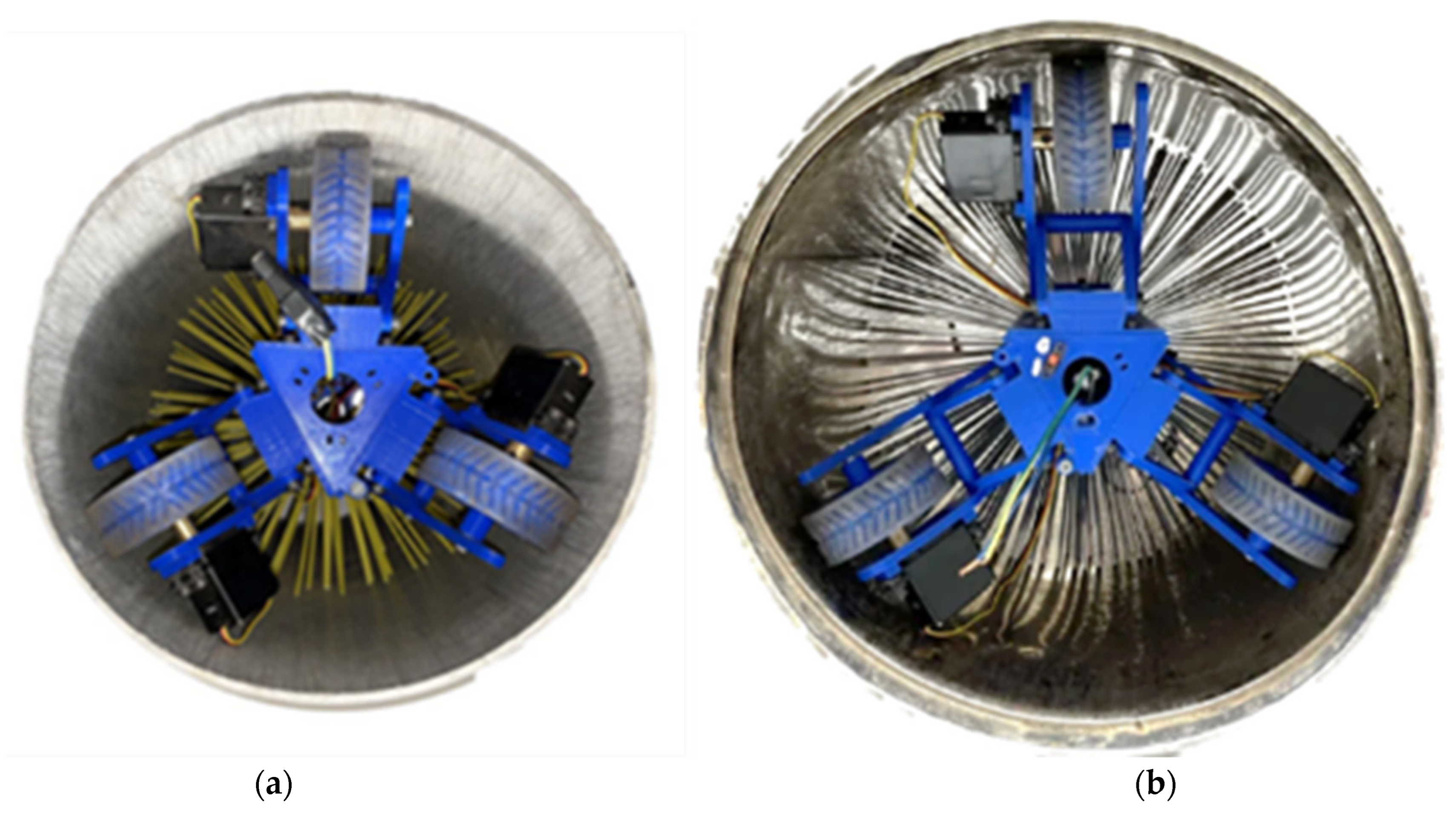
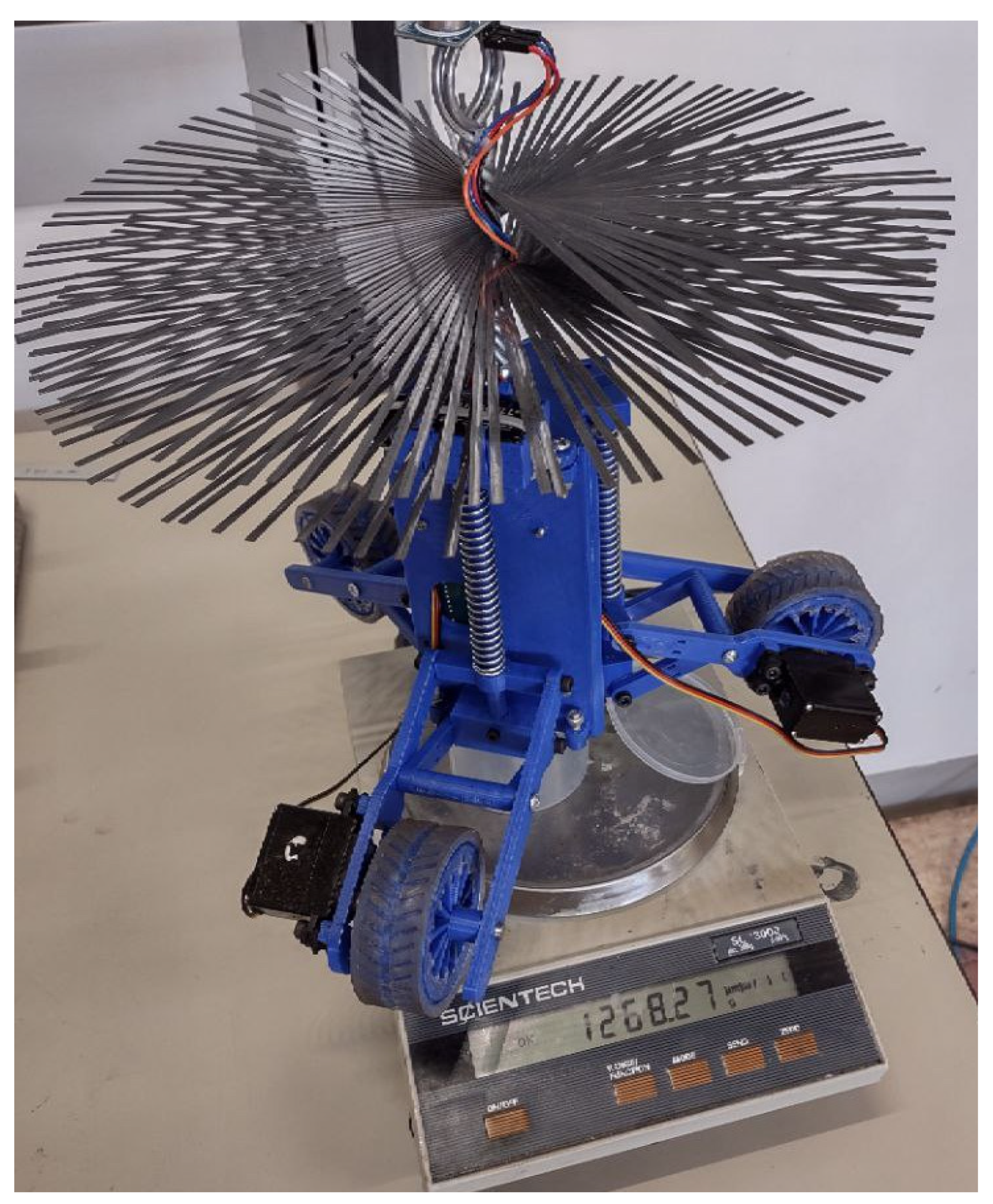
3. Prototype of the Robot
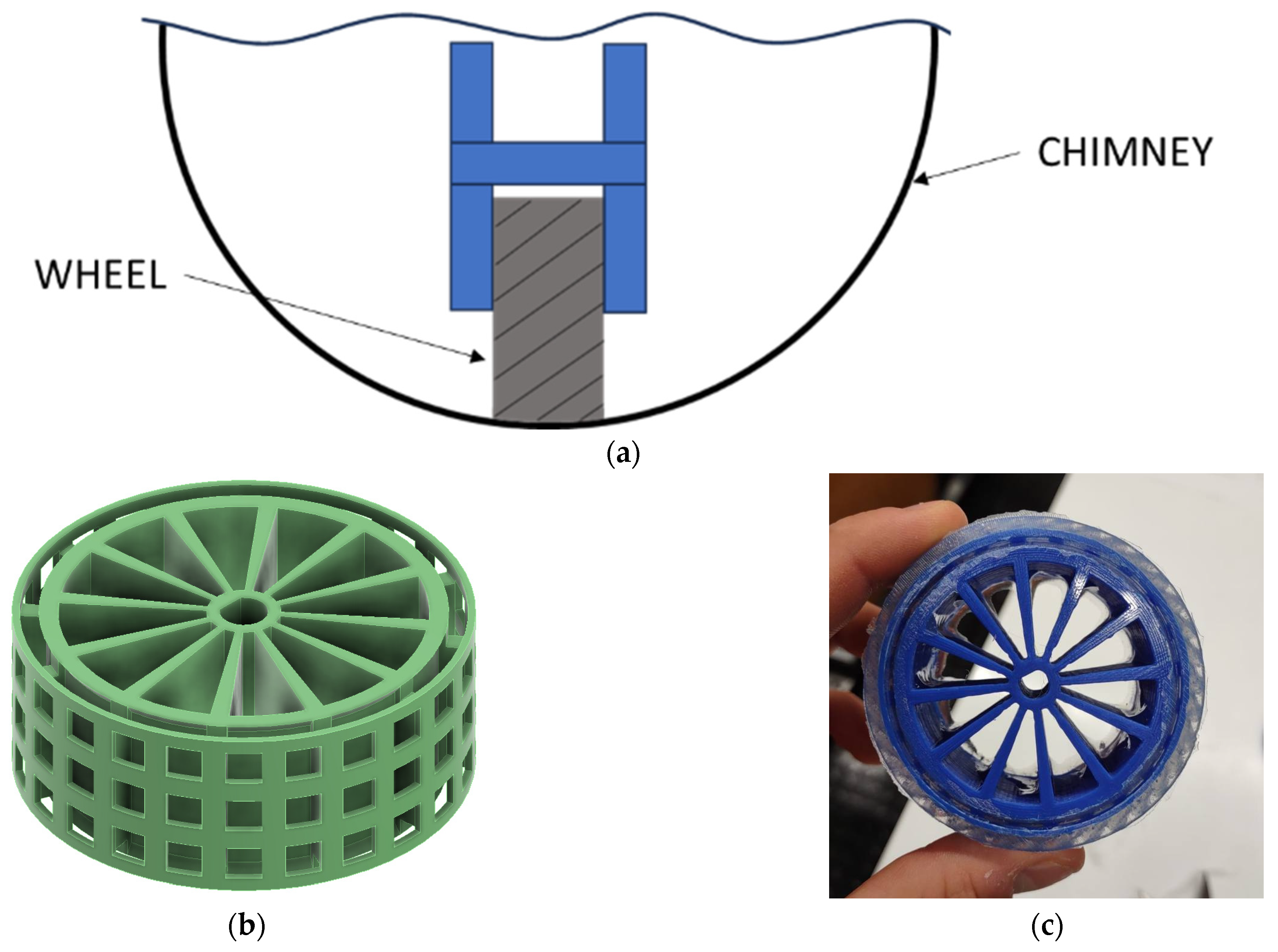
Wheels Manufacturing
- Wheel rim: it was decided to make the spokes thinner to lighten the wheel, to make the rim smaller to increase the thickness of the silicone, and to make the “mesh” configuration less dense;
- Molded mold: it was produced in two separate halves. In addition, the depth of the grooves was increased to improve the grip of the wheel;
- Bottom mold: the centering pin was removed and a circular guide was inserted to center the edge and prevent the silicone from flowing to the bottom of the mold;
- To create an exactly symmetrical mold, the upper mold is identical to the lower mold.
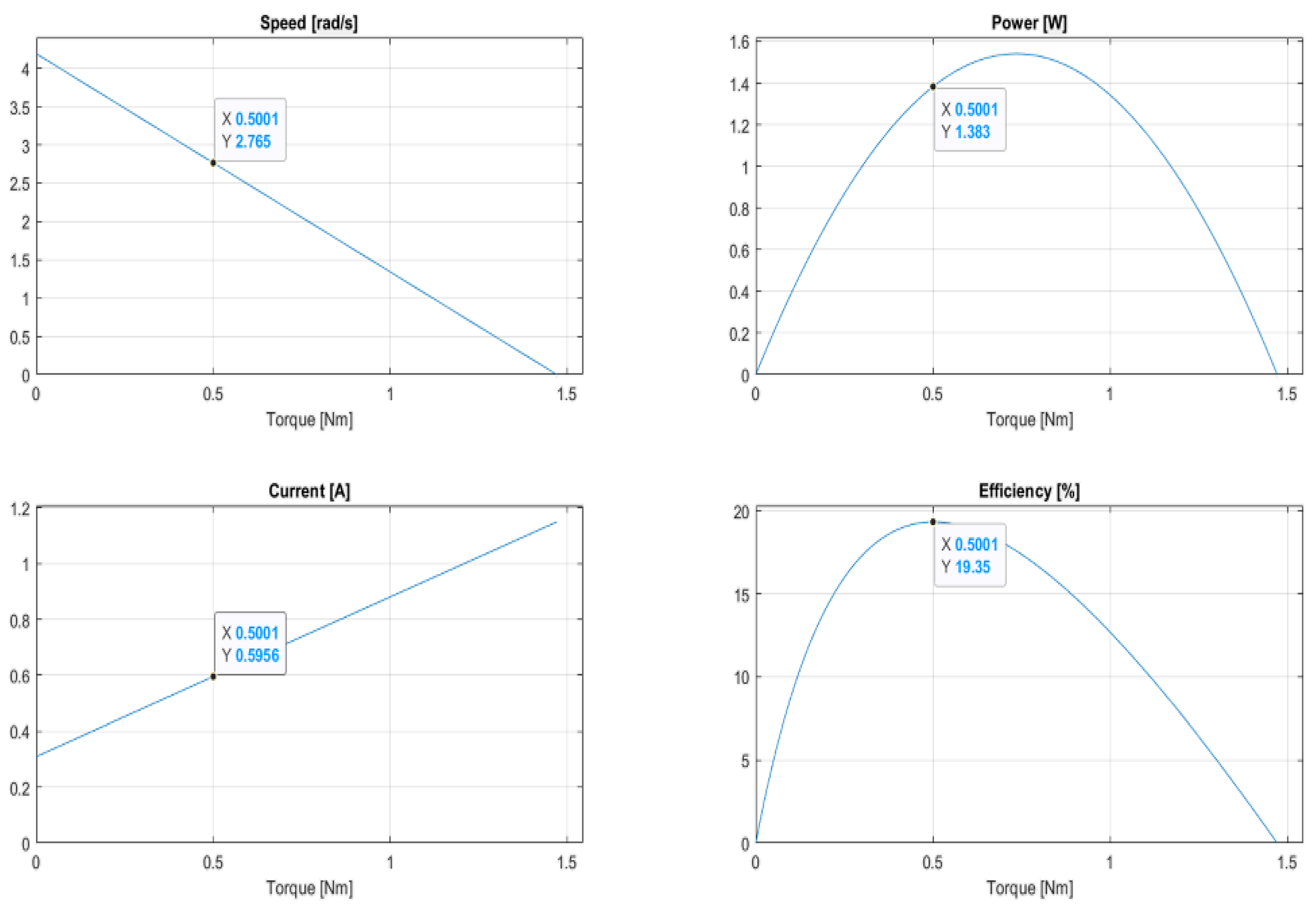
4. Main Hardware Features
- Free speed ωfree = 4.19 rad/s;
- Stall torque τstall = 1.42 Nm;
- Stall current istall = 1.15 A;
- No-load current ifree= 0.31 A;
- Supply voltage V = 12 V;
- Reduction ratio = 1:224.
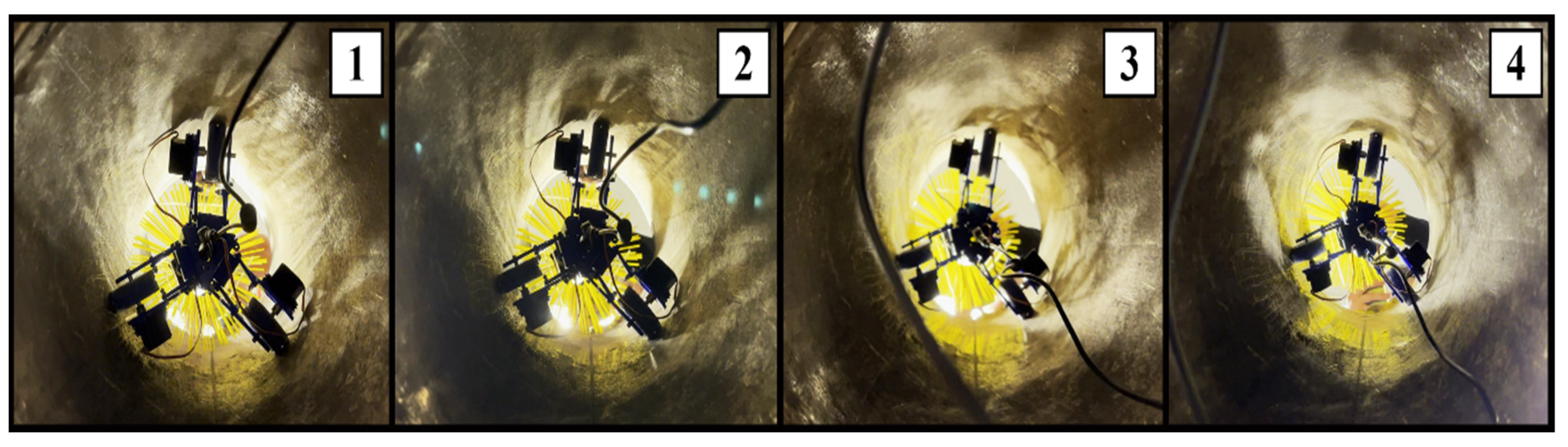
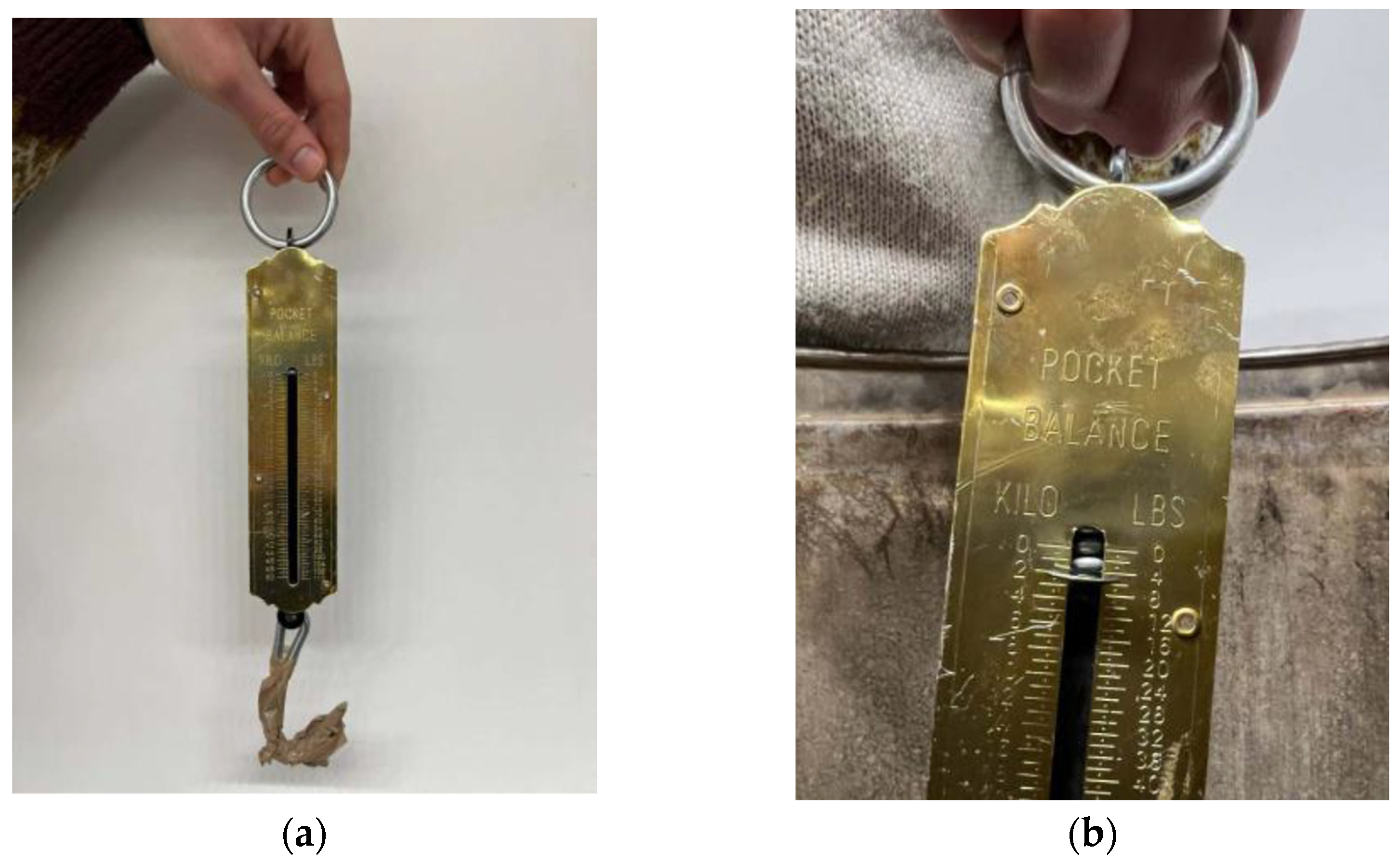
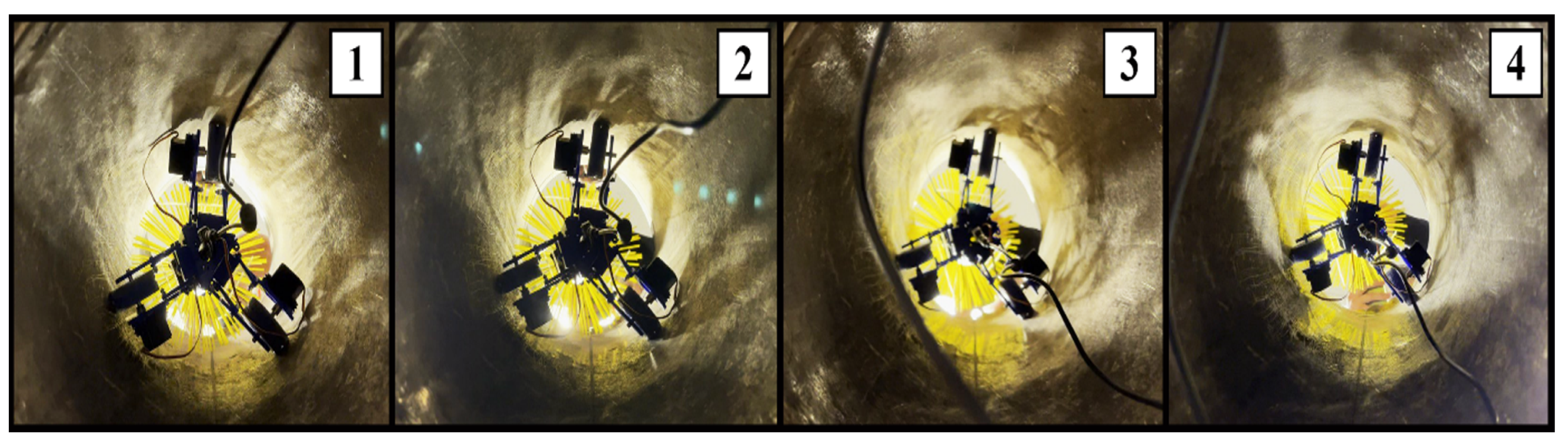
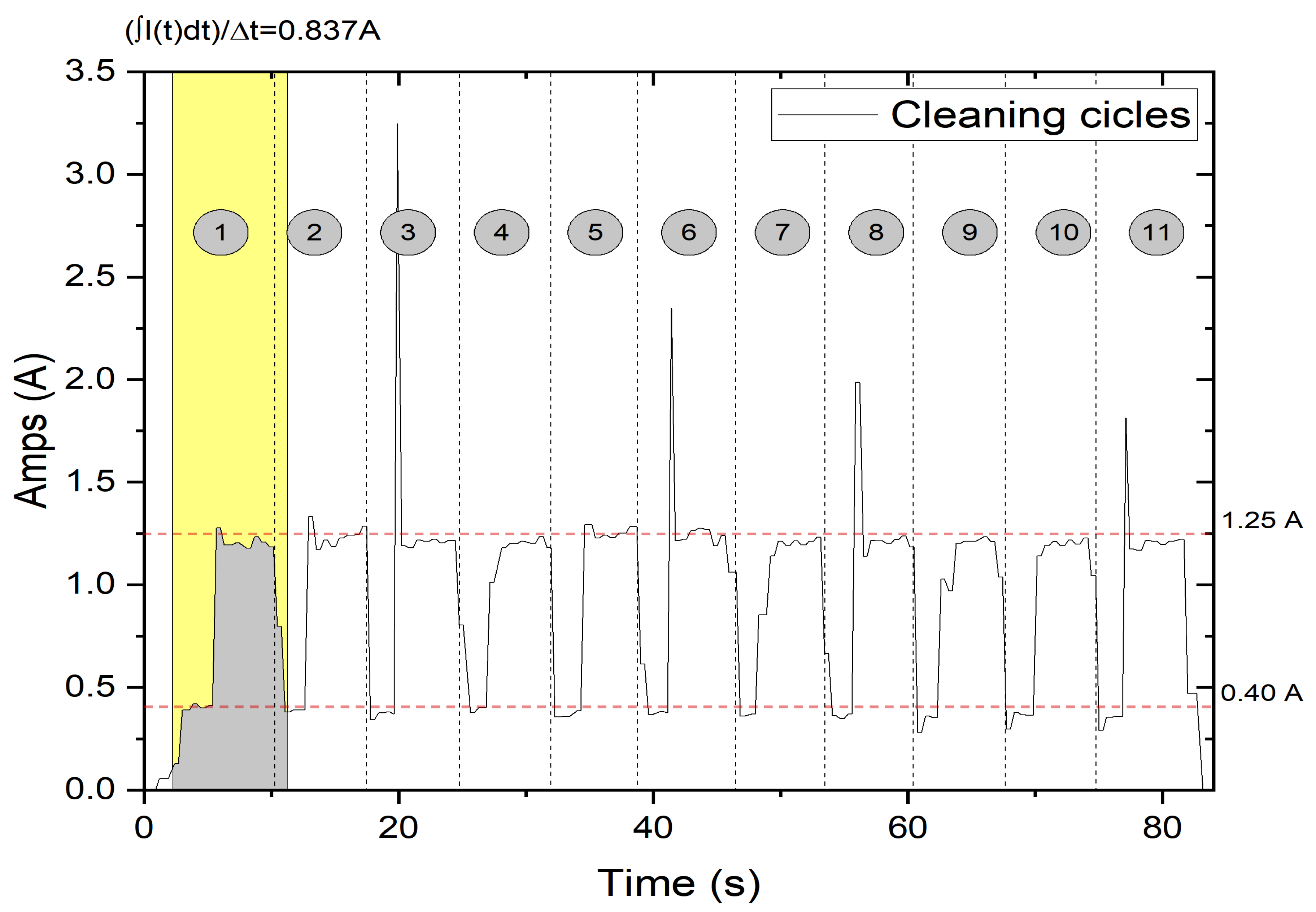
5. Preliminary Experimental Tests
Actuation Tests
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Campbell, R.; Home Fires Involving Heating Equipment. National Fire Protection Association Research. 2018. Available online: https://www.nfpa.org/-/media/Files/News-and-Research/Fire-statistics-and-reports/US-Fire-Problem/Fire-causes/osHeating.pdf (accessed on 23 October 2023).
- Marcinko, P.; Virgala, I.; Miková, Ľ.; Prada, E.; Kelemenová, T.; Kelemen, M.; Varga, M. Chimney Cleaning and Inspection Robot. Acta Mech. Slovaca 2019, 23, 6–9. [Google Scholar] [CrossRef]
- Alegre, T.V. Appliance to Clean Industrial Chimneys. 2004. Available online: https://patents.google.com/patent/US20040231089A1/en (accessed on 23 October 2023).
- Sinčák, P.J.; Virgala, I.; Kelemen, M.; Prada, E.; Bobovský, Z.; Kot, T. Chimney sweeping robot based on a pneumatic actuator. Appl. Sci. 2021, 11, 4872. [Google Scholar] [CrossRef]
- Kahnamouei, J.T.; Moallem, M. A comprehensive review of in-pipe robots. Ocean. Eng. 2023, 277, 114260. [Google Scholar] [CrossRef]
- Rusu, C.; Mihai, O.T. Adapting Mechanisms for In-Pipe Inspection Robots: A Review. Appl. Sci. 2022, 12, 6191. [Google Scholar] [CrossRef]
- Jang, H.; Kim, T.Y.; Lee, Y.C.; Song, Y.H.; Choi, H.R. Autonomous Navigation of In-Pipe Inspection Robot Using Contact Sensor Modules. IEEE/ASME Trans. Mechatron. 2022, 27, 4665–4674. [Google Scholar] [CrossRef]
- Liu, Y.; Dai, X.; Wang, Z.; Bi, Q.; Song, R.; Zhao, J.; Li, Y. A Tensegrity-Based Inchworm-Like Robot for Crawling in Pipes with Varying Diameters. IEEE Robot. Autom. Lett. 2022, 7, 11553–11560. [Google Scholar] [CrossRef]
- Zhang, Z.; Wang, X.; Wang, S.; Meng, D.; Liang, B. Design and Modeling of a Parallel-Pipe-Crawling Pneumatic Soft Robot. IEEE Access 2019, 7, 134301–134317. [Google Scholar] [CrossRef]
- Colvalkar, A.; Nagesh, P.; Sachin, S.; Patle, B.K. A Comprehensive Review on Pipe Inspection Robots. Int. J. Mech. Eng. 2021, 10, 51–66. [Google Scholar]
- Brown, L.; Carrasco, J.; Watson, S. Autonomous Elbow Controller for Differential Drive In-Pipe Robots. Robotics 2021, 10, 28. [Google Scholar] [CrossRef]
- Qiao, J.; Shang, J.; Goldenberg, A. Development of Inchworm In-Pipe Robot Based on Self-Locking Mechanism. IEEE/ASME Trans. Mechatron. 2012, 18, 799–806. [Google Scholar] [CrossRef]
- Kim, H.M.; Choi, Y.S.; Lee, Y.G.; Choi, H.R. Novel Mechanism for In-Pipe Robot Based on a Multiaxial Differential Gear Mechanism. IEEE/ASME Trans. Mechatron. 2017, 22, 227–235. [Google Scholar] [CrossRef]
- Nodehi, S.E.; Bruzzone, L.; Fanghella, P. Porcospino, spined single-track mobile robot for inspection of narrow spaces. Robotica 2023, 41, 3446–3462. [Google Scholar] [CrossRef]
- Boomeri, V.; Tourajizadeh, H.; Askarian, H.R.; Pourebrahim, S. Design, modeling, and manufacturing of a novel robust gripper-based climbing robot: KharazmBot. Robotica 2023, 41, 2365–2396. [Google Scholar] [CrossRef]
- Zhao, J.; Wang, J.; Liu, Q.; Luo, X.; Dong, X. A review of mechanical model, structure, and prospect for long-distance pipeline pig and robot. Robotica 2022, 40, 4271–4307. [Google Scholar] [CrossRef]
- Jang, H.; Kim, H.M.; Lee, M.S.; Song, Y.H.; Lee, Y.; Ryew, W.R.; Choi, H.R. Development of modularized in-pipe inspection robotic system: MRINSPECT VII. Robotica 2022, 40, 1361–1384. [Google Scholar] [CrossRef]
- Li, H.; Sun, X.; Chen, Z.; Zhang, L.; Wang, H.; Wu, X. Design of a wheeled wall climbing robot based on the performance of bio-inspired dry adhesive material. Robotica 2022, 40, 611–624. [Google Scholar] [CrossRef]
- Li, D.; Pan, Z.; Deng, H.; Peng, T. Trajectory tracking control law of multi-joint snake-like robot based on improved snake-like curve in flow field. Int. J. Adv. Robot. Syst. 2019, 16, 1729881419844665. [Google Scholar] [CrossRef]
- Orozco-Magdaleno, E.C.; Gomez-Bravo, F.; Castillo-Castaneda, E.; Carbone, G. Evaluation of Locomotion Performances for a Mecanum-Wheeled Hybrid Hexapod Robot. IEEE/ASME Trans. Mechatron. 2021, 26, 1657–1667. [Google Scholar] [CrossRef]
- Perez-Diaz, J.L.; Diez-Jimenez, E.; Valiente-Blanco, I.; Cristache, C.; Alvarez-Valenzuela, M.-A.; Sanchez-Garcia-Casarrubios, J.; Ferdeghini, C.; Canepa, F.; Hornig, W.; Carbone, G.; et al. Performance of magnetic-superconductor non-contact harmonic drive for cryogenic space applications. Machines 2015, 3, 138–156. [Google Scholar] [CrossRef]
- Salvatore, M.M.; Galloro, A.; Muzzi, L.; Pullano, G.; Odry, P.; Carbone, G. Design of PEIS: A low-cost pipe inspector robot. Robotics 2021, 10, 74. [Google Scholar] [CrossRef]
- Pilkey, W.D.; Pilkey, D.F. Peterson’s Stress Concentration Factors, 3rd ed.; John Wiley & Sons: Hoboken, NJ, USA, 2008. [Google Scholar]
- Micro Gear Reduction Motor 12V DC Worm Reversible. Available online: https://it.dhgate.com/product/micro-gear-reduction-motor-12v-dc-worm-reversible/429568192.html (accessed on 28 September 2023).









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| PRODUCT DESIGN SPECIFICATIONS | ||
|---|---|---|
| FUNCTION | CHIMNEY CLEANING DEVICE | |
| PERFORMANCE AND SIZE | DIMENSIONS AND MASS OF THE DEVICE | |
| BODY CROSS DYMENSION: 300–400 mm (mandatory) |
| |
| MASS: ≤ 2.2 KG (desired) |
| |
| BRUSH SIZE AND MASS | ||
| DIAMETER: same of chimney (mandatory) |
| |
| LENGTH: no specific requirement | ||
| MASS: ≤ 0.3 KG (desired) | ||
| MOTION | ||
| SPEED: ≤ 0.15 M/S (desired) MOTION LENGTH: up to 50 m |
| |
| POSITIONING | ||
| POSITIONING AT CHIMNEY: Manual |
| |
| EXECUTION | ||
| OPERATION: automatic or semi-automatic |
| |
| COMPATIBILITY | ||
| Adaptability to various chimneys |
| |
| MAINTENANCE | ||
| At Each Use: Cleaning Brush and Robot Body |
| |
| Periodic: Wheel Cleaning Every Two-Three Uses | ||
| Extraordinary: Replacement of Wheels, Brush, and Motors (desired) |
| |
| LIFE IN SERVICE | ||
| 1000 h (desired) |
| |
| MANUFACTURE | PRODUCTION COST | |
| ≤ €250 (desired) |
| |
| TERMS OF USE | OPERATING TEMPERATURE | |
| 0–50 °C (mandatory) |
| |
| PRESENCE OF EXTERNAL AGENTS | ||
| Soot |
| |
| MATERIAL | DEVICE BODY | |
| Aluminum and plastic (desired) |
| |
| BRUSH | ||
| Off-the-shelf brush (desired) |
| |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Arcorace, G.; Caruso, G.; Cavallaro, P.; Paglia, A.P.; Sollazzo, C.; Tripodi, M.; Curcio, E.M.; Lago, F.; Carbone, G. Towards the Design of a User-Friendly Chimney-Cleaning Robot. Machines 2023, 11, 1024. https://doi.org/10.3390/machines11111024
Arcorace G, Caruso G, Cavallaro P, Paglia AP, Sollazzo C, Tripodi M, Curcio EM, Lago F, Carbone G. Towards the Design of a User-Friendly Chimney-Cleaning Robot. Machines. 2023; 11(11):1024. https://doi.org/10.3390/machines11111024
Chicago/Turabian StyleArcorace, Giuliano, Giovanni Caruso, Pietro Cavallaro, Antonio Pantaleone Paglia, Christian Sollazzo, Manuel Tripodi, Elio Matteo Curcio, Francesco Lago, and Giuseppe Carbone. 2023. "Towards the Design of a User-Friendly Chimney-Cleaning Robot" Machines 11, no. 11: 1024. https://doi.org/10.3390/machines11111024
APA StyleArcorace, G., Caruso, G., Cavallaro, P., Paglia, A. P., Sollazzo, C., Tripodi, M., Curcio, E. M., Lago, F., & Carbone, G. (2023). Towards the Design of a User-Friendly Chimney-Cleaning Robot. Machines, 11(11), 1024. https://doi.org/10.3390/machines11111024