1. Introduction
There is an increasing demand for the integration of control theory in everyday devices. The equipment contains more and more controllers than before, which makes control theory play a critical role in mechatronics engineering. Mechatronics is an interdisciplinary subject, including electronics, mechanical, and control theory [
1]. Traditionally, control theory employs block diagrams, and block diagrams are derived from ordinary differential equations(ODEs). ODEs could be substituted by the bond graph from a mathematical point of view.
Mechatronics systems are defined as multidisciplinary engineering systems, combining precise mechanical engineering, electronic control, and intelligent software in a system framework that is utilized in product design and production processes [
1]. Mechatronics engineering focuses on realistic problem solutions from a strong mathematical background standpoint because of the cross-subject characteristics [
2]. Mechatronics subjects are interdisciplinary, which means the students need to master the knowledge of multiple subjects to fulfill the requirements of daily study [
3]. Mechatronics engineering includes four components: mechanics, electronics, computers, and control methods. The more components involved, the more technologies and teaching methods [
4]. The education of undergraduate mechatronics engineering should focus on fundamental knowledge, due to the critical role it plays [
5]. After introducing the education aspect, from a robotics application point of view, mechatronics subjects need integration tools to achieve synergy since they contain multidisciplinary field knowledge [
6,
7]. Bond graph is proposed as an integration graphical tool to present the synergy in mechatronics engineering, and it has been proposed as the right choice for education students in modeling systems for decades [
8]. The bond graph has been not only as an intelligent design support in the education monitoring system [
9] but also as an interactive teaching modeling tool in bioengineering modeling and simulation [
10]. According to the paper [
11], mechatronics subjects require a series of operations such as analysis and assessment to draw students’ attention and accomplish multidisciplinary. It points out that students prefer a relaxed and visual teaching method to traditional teaching methods [
12]. Therefore, this article uses a new teaching model in conjunction with traditional education and develops a suitable teaching model by analyzing and assessing students.
Bond graph is a graphical and visual tool to represent the energy flows in multiple domains [
13], it could represent many fields not only the thermomechanical field [
14], but also the mechatronics subject [
15]. Besides applying simulation in multiple domains and system-level understanding, the bond graph deals with fault diagnosis in the industry field [
16].
The bond graph has all the advantages of the visual representation. Visual representations such as graph illustrations and diagrams increased favorability with students [
17]. The graph plays a pivotal role in various domains, and it is relevant for understanding and comprehending [
18]. Research from Stanford University said that visual representations are not only for lower-level work but also for more advanced or abstract [
19].
The proportional–integral–derivative (PID) controller is a classical linear controller [
20,
21,
22] in control theory. The benefits of adaptive reference control of the model are essentially outlined in [
23]. In control theory, there is no perfect controller; for example, the PID controller response is quick, but there is an obvious oscillating response before reaching the desired value as seen in the simulation [
24]. Compared with the PID controller, the sliding mode controller is a type of discontinuous or nonlinear control approach [
25], which provides nonlinearity in DC motor speed control [
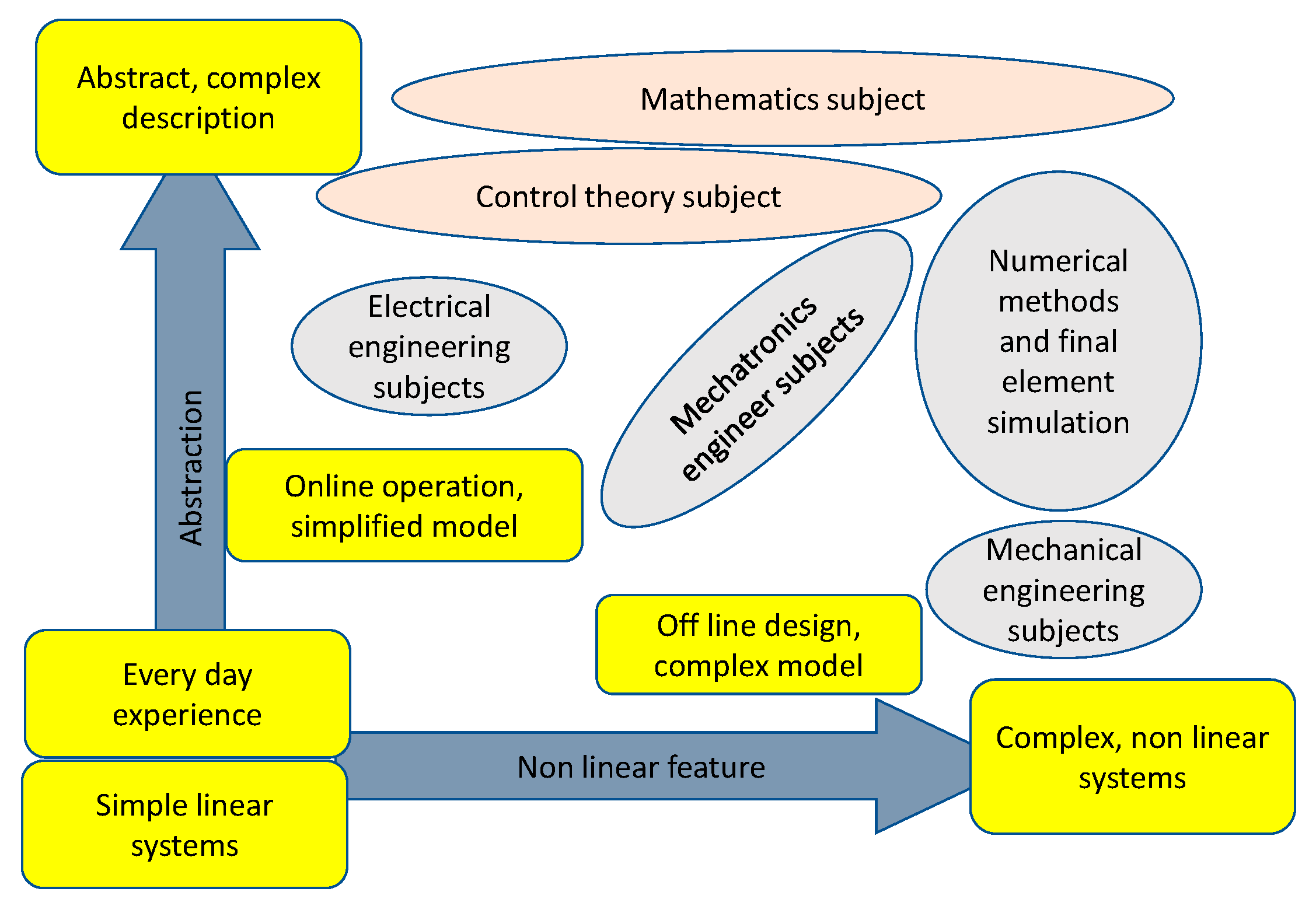
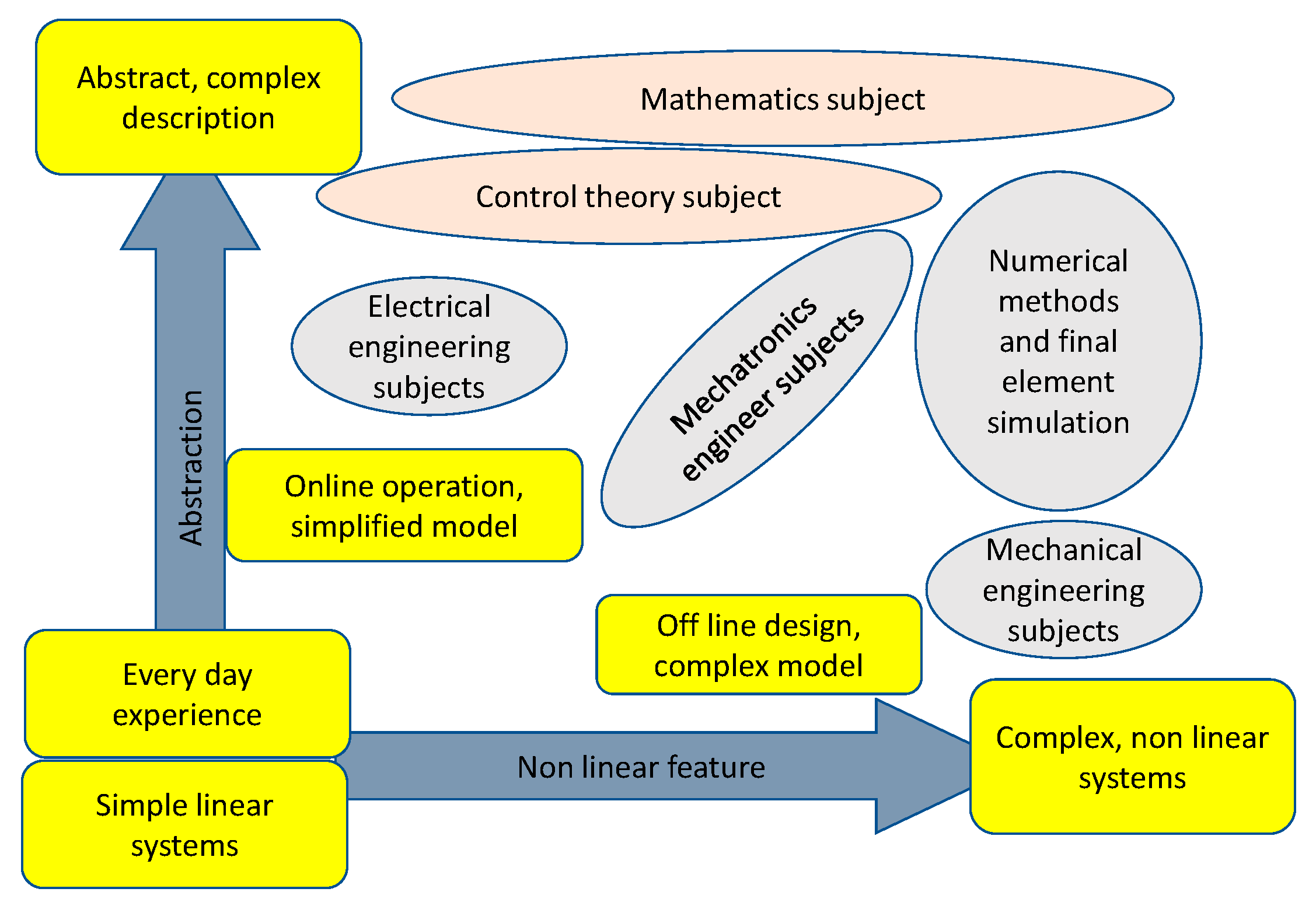
26]. The sliding mode controller is chosen as a teaching material because it requires high nonlinear features and high abstraction in the mechatronics engineering and control theory just as
Figure 1 shows [
27,
28,
29].
A simple conclusion can be derived from all the surveys above: the mechatronics subject is an interdisciplinary and complex subject for university students. And the task for teachers is to figure out an easier method to teach relevant subjects. The bond graph is proposed as the core method of mechatronics subjects, because of its power synergy function and comprehensive graphical language.
The core subject, ‘modeling and simulation’, integrates a high level of abstraction and non-linear features as shown in
Figure 1. Students need to spend plenty of time studying mechatronics subjects using the traditional method. In this paper, a new teaching method, the bond graph method with a high accelerated learning curve is proposed for students to learn mechatronics subjects. It could help students learn and master the subject concepts quickly compared with the traditional mathematical method.
Compared with the traditional methodology, students can derive block diagrams directly from the bond graph without complex mathematical calculations. This comparison indicates that the bond graph method is a more straightforward approach to explaining system dynamics compared to the traditional mathematical method.
1.1. Motivation and Problem Statement
The bond graph is a powerful graphical tool in the control system. The demand for control theory in everyday devices is expanding, necessitating the involvement of not only dedicated control specialists but also a wider range of engineers to fully embrace control theory. However, it is essential to introduce an alternative teaching method to effectively engage non-specialists in understanding and applying control theory principles. The objective is to empower mechatronic engineers to extend their proficiency in mathematical modeling tools from mechatronics design to control system design.
From the mechatronics point of view, the DC motor with control is a good example since it has electrical and mechanical parts. From the control theory perspective, DC motor control is very simple since the generation of the magnetic field and generation of the torque can be controlled separately. We can assume that the magnetic field is constant, and we focus on the rotation of the motor. Three possible variables can be controlled: torque, angular velocity, and position angle.
The very basic controller type is the PID all textbooks on control start with. What is very new in this article is the bond graph description of the PID controller.
The sliding mode control (SMC) is selected as a little bit of an advanced control. It is popular in the field of motion control since the real system always consists of power electronics elements. The term ’power electronics’ refers to switching-mode transistors, making it a typical variable structure system. Sliding mode is a special operation mode of variable structure systems. The realization of a sliding mode controller is straightforward from an engineering standpoint; however, the mathematical description of the sliding mode requires highly sophisticated mathematical techniques [
30]. Undergraduate students can write a simple code for sliding mode control even if they do not understand the whole and deep theoretical background.
The professor decided on the bond graph method as a practical graphical tool [
31,
32] for the modeling subject in the mechatronics engineering faculty University of Debrecen around 2015. First, the bond graph was introduced to MSc students in Control Theory subject, and later we introduced it in undergraduate Basics of Mechatronics (first semester) and Modelling and Simulation subject (fifth semester). According to the literature, PID and sliding mode controllers have not been represented using the bond graph before.
1.2. Structure of the Article
In this paper, the novel teaching method structure is as follows: the
Section 2 introduces the simulation of the DC motor using the traditional method and the bond graph.
Section 3 demonstrates the teaching methods to mechatronics undergraduate students using a PID controller. In
Section 4, the paper proposed a simple sliding mode controller with a general target model and an adaptive robust sliding mode control with the real motor parameters as nonlinear-control teaching materials. The controllers and the model are simulated using the bond graph method. And, in the following section, the paper presents sample tests conducted on undergraduate students from the mechatronics department, at the University of Debrecen. The results are showcased in a chart format, providing evidence to support the claim that the bond graph method is an efficient and acceptable learning tool compared to the traditional mathematical method for mechatronics engineering students.
2. DC Electrical Machine Modeling
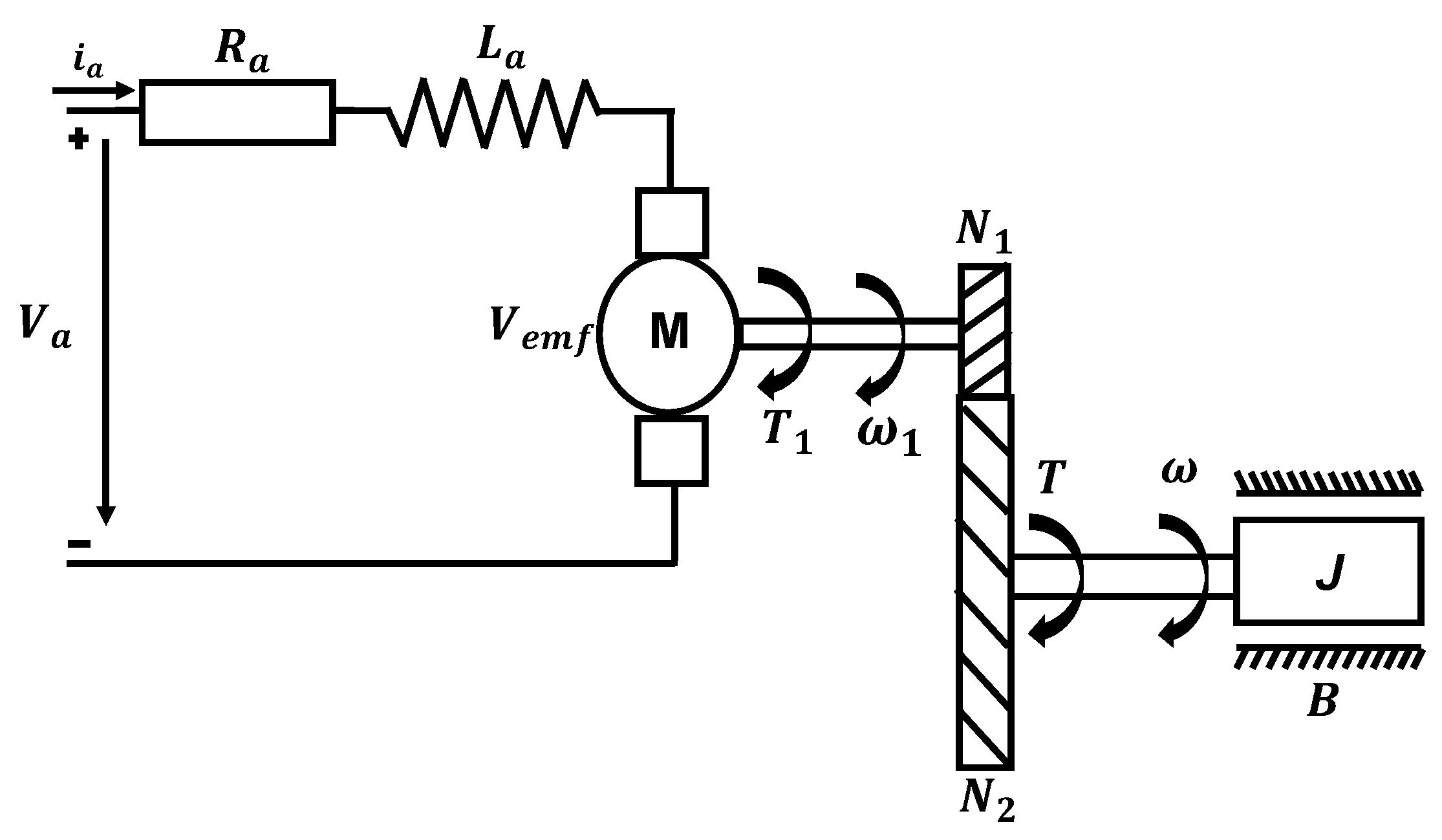
A DC motor is the demonstration model utilized as a teaching material in this course. The DC electrical machines are applied as a fundamental actuator model in undergraduate mechatronics engineering study. Most electrical machines can be simplified as DC electrical machines. As a result, DC electrical machines are commonly employed as actuation elements in industrial applications. The DC electrical machines are simple to model and analyze, making them ideal for educational purposes.
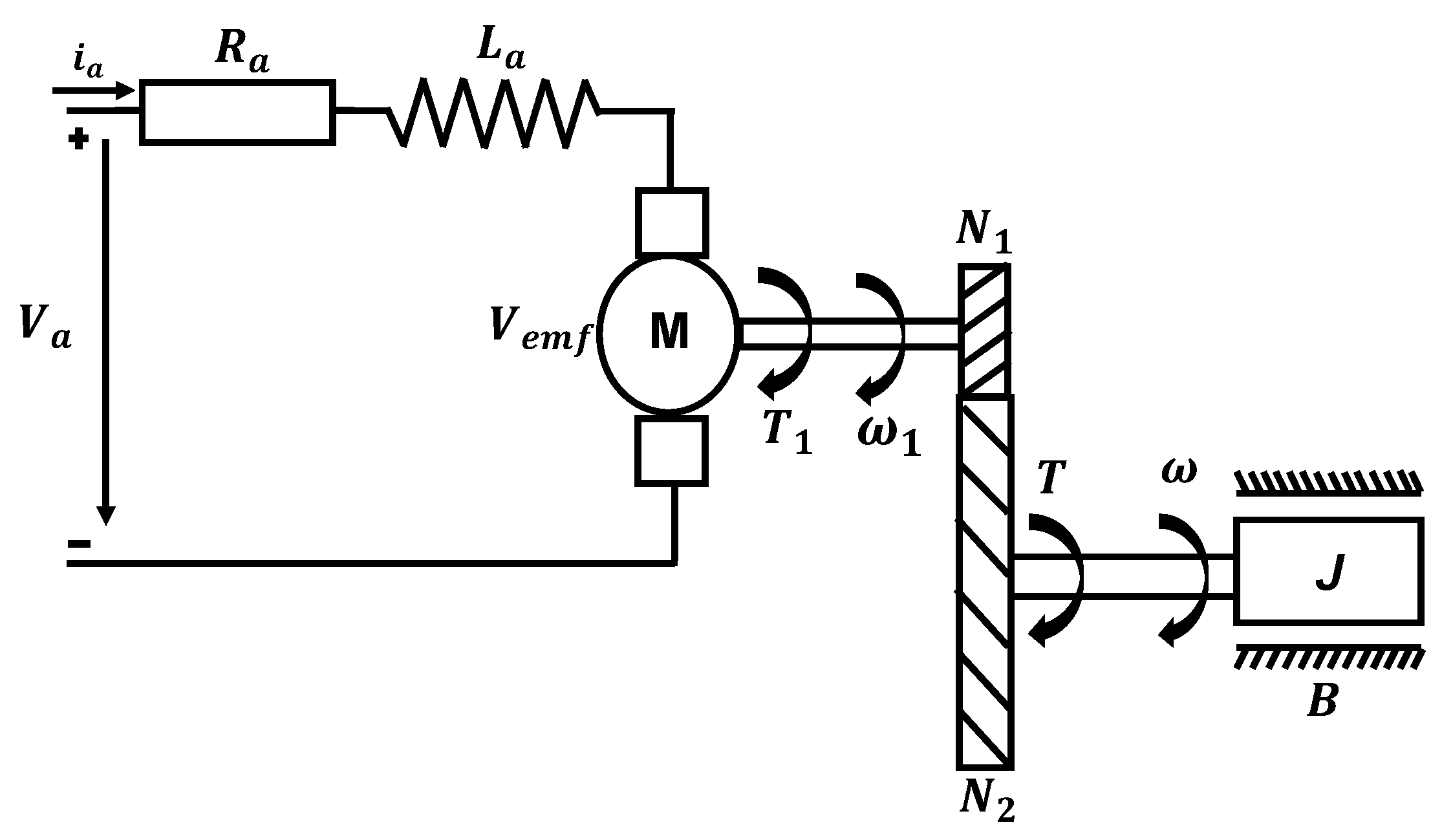
The electrical circuit on the left side is connected by a voltage resource, an inductor, and a resistor with a series connection. The mechanical side relates to a gearbox and winding with moments of inertia. An “ideal motor” connects electrical and mechanical parts in
Figure 2. The ideal motor is modeled as a resistance
, an inductor
and back electromotive force
.
An ideal gearbox with the ratio set to is added to the DC motor model for convenient simulation, where the torque and angular velocity relationship are , and .
2.1. DC Motor Modeling Using Ordinary Differential Equation (ODE)
A mathematical representation of the DC motor is shown in the following (
) and (
).
where the left side of the rotor is the electrical part, the circuit consists of a resistor
; an inductor
;
is the back electromotive force
;
is the armature voltage; and
donates the armature current of the electrical circuit. On the right side of the rotor,
is the electromechanical torque generated by the motor,
is the torque transform by gearbox, and
denotes the load torque.
(rad/s) shows the speed of the motor,
(rad/s) donates the speed of the rotor,
and
represent the rotor inertia and the viscous friction of the DC motor electrical part.
and
represent the gyrator’s back EMF constant and motor constant, respectively.
The time constant is a critical parameter of the DC motor which could provide a rough estimate of DC motor response time; the step time of simulation should be shorter than the DC motor time constant. Electrical constant = = s = 0.106 .
The low pass filter time constant at the D-part in the PID controller is set to
; it has the same order as the electrical time constant of the motor. The rotor inertia and the mechanical time constant could derive the coefficient of viscous friction: 0.898 Nms/rad. And the torque constant is equal to the back EMF constant: 16.8 Vms/rad. DC motor and gear drive parameters are all based on the motor Maxon A-Max26 (1109961) and gear drive (110396) shown in
Table 1 and
Table 2.
2.2. Bond Graph Modeling in the Control Loop in Mechatronics Engineering
The mathematical methodology solution could be more difficult if the schematic is complex enough; in the meantime, the bond graph could prove an easier solution to solve the same question of the traditional method.
Our department uses the bond graph method to derive the block diagram rather than using the usual method. The bond graph may be constructed immediately by the schematic, obviating the steps of traditional formula analysis. The bond graph could merge two separate field systems. The DC electrical machine is an excellent example to demonstrate this principle.
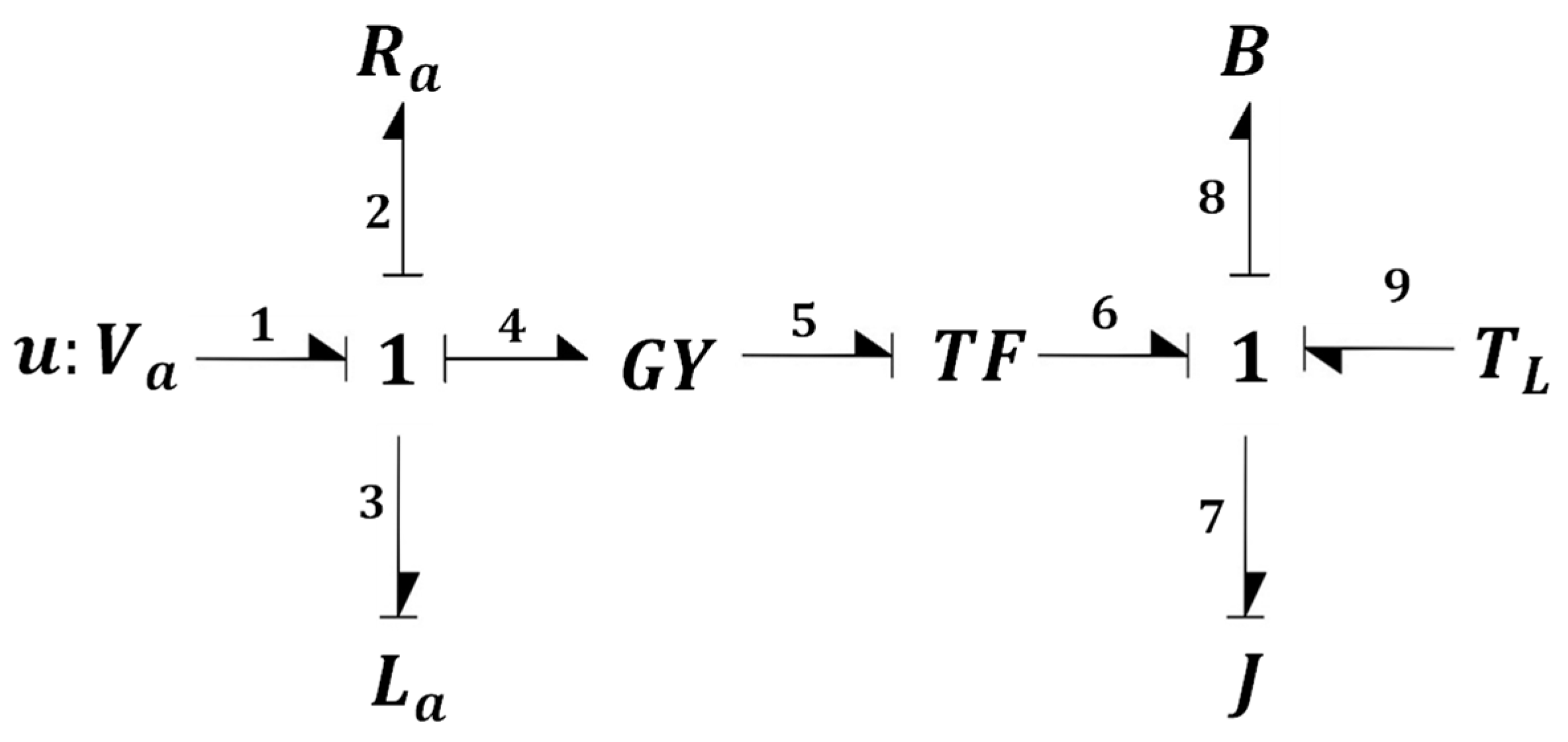
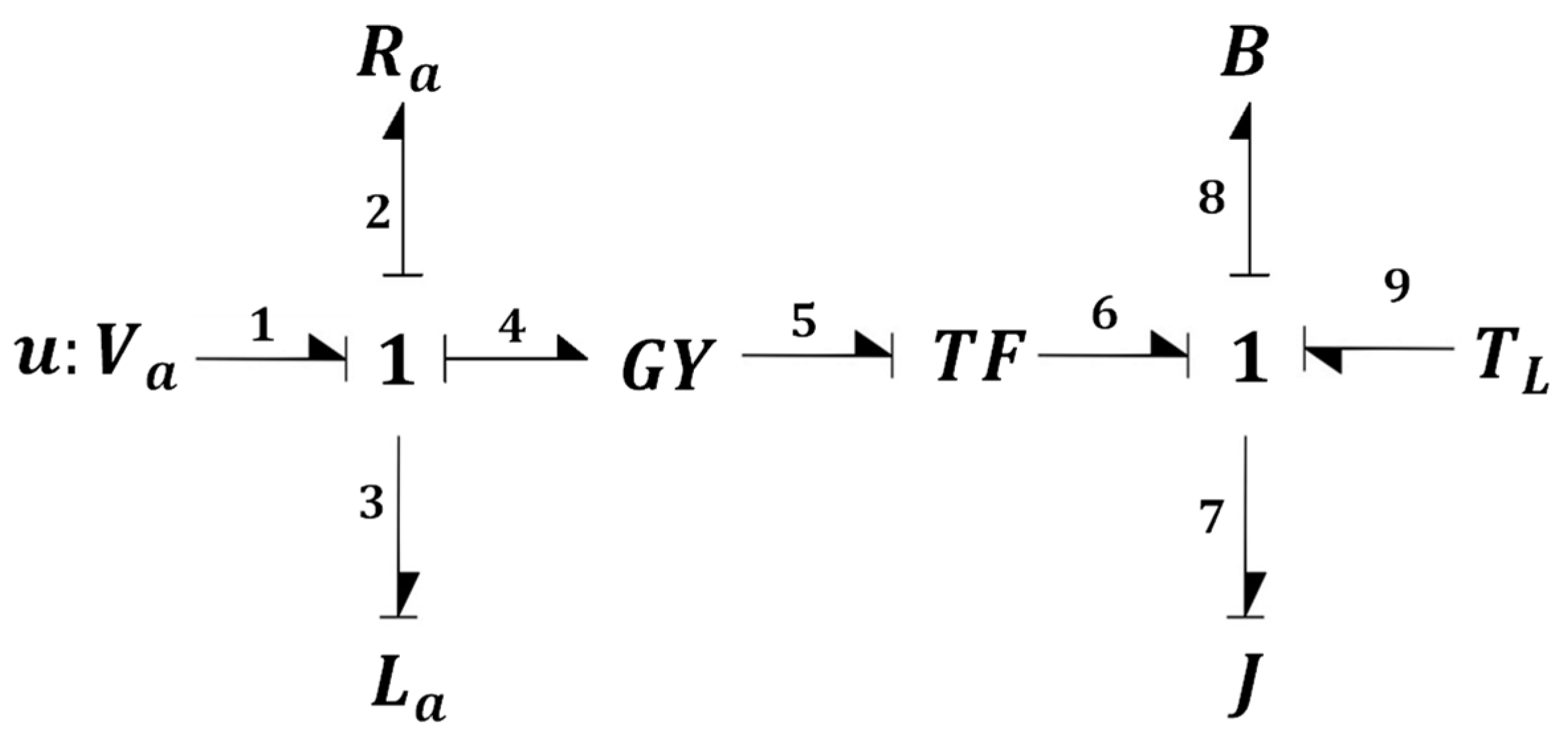
The bond graph of the DC motor is depicted in
Figure 3. There are two parts to the bond graph. The electrical and mechanical parts are represented by two 1
junctions, respectively. The gyrator connects two parts since the DC motor can convert one form of energy to another form of energy. TF represents the gearbox in the schematic because the energies’ form is the same as the gearbox. The numbers on the bond are the notation, which could help with visualization and calculation of the energies and flows.
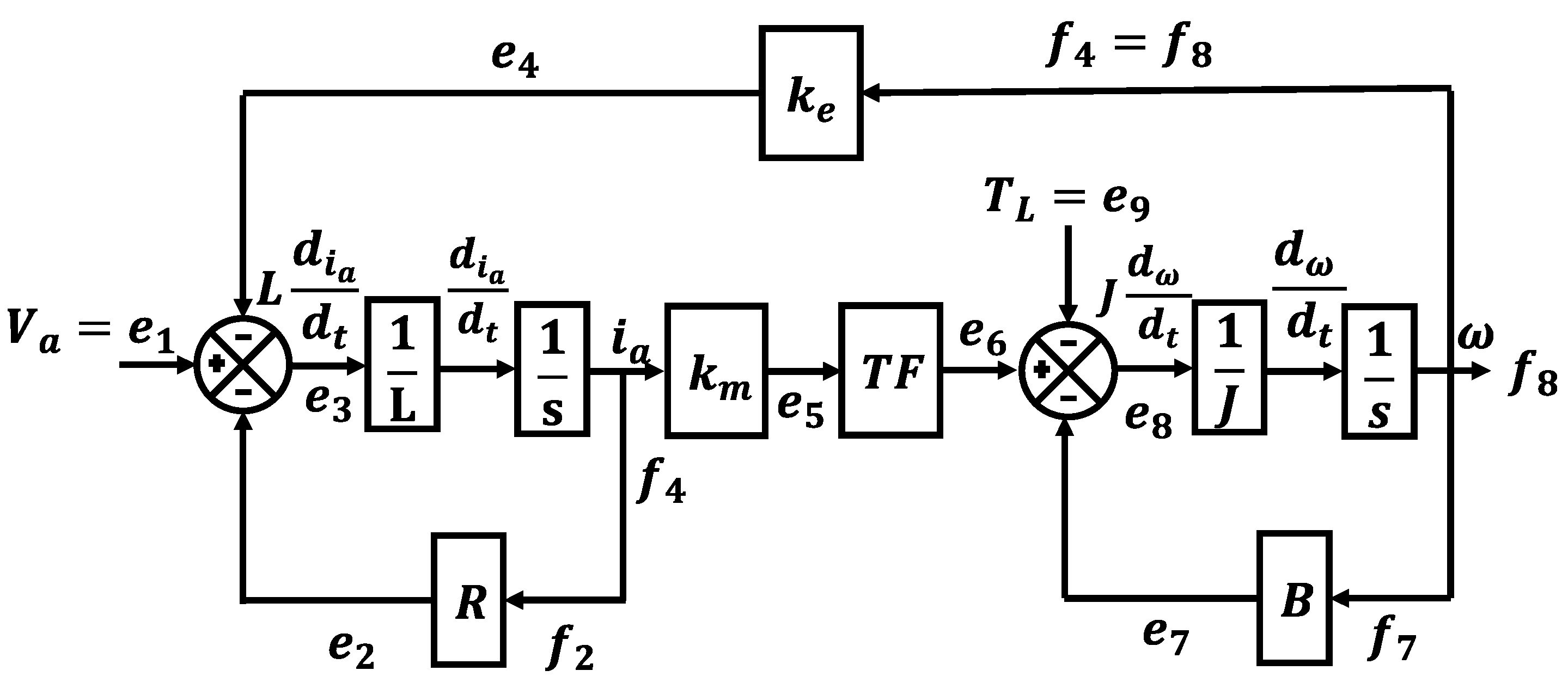
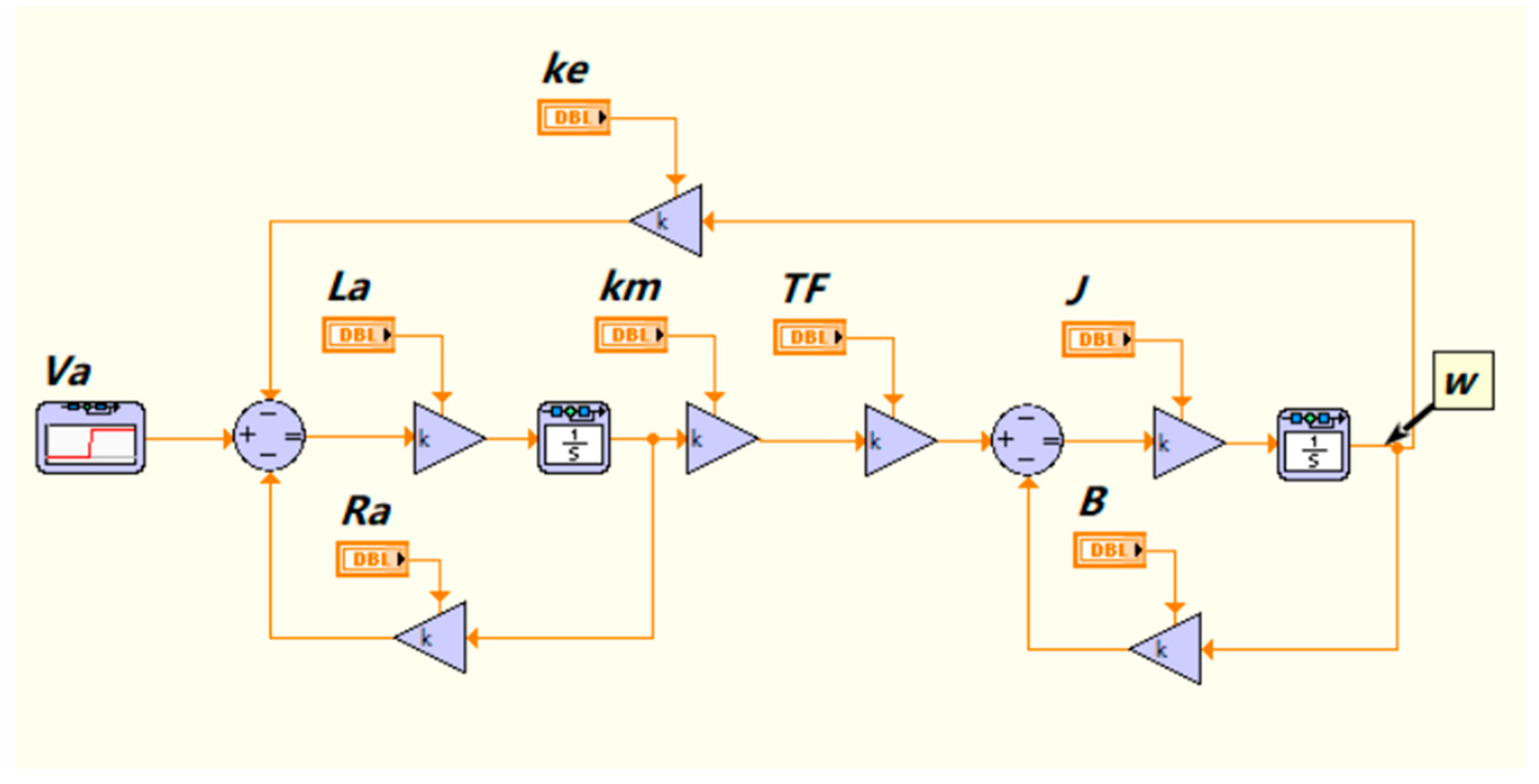
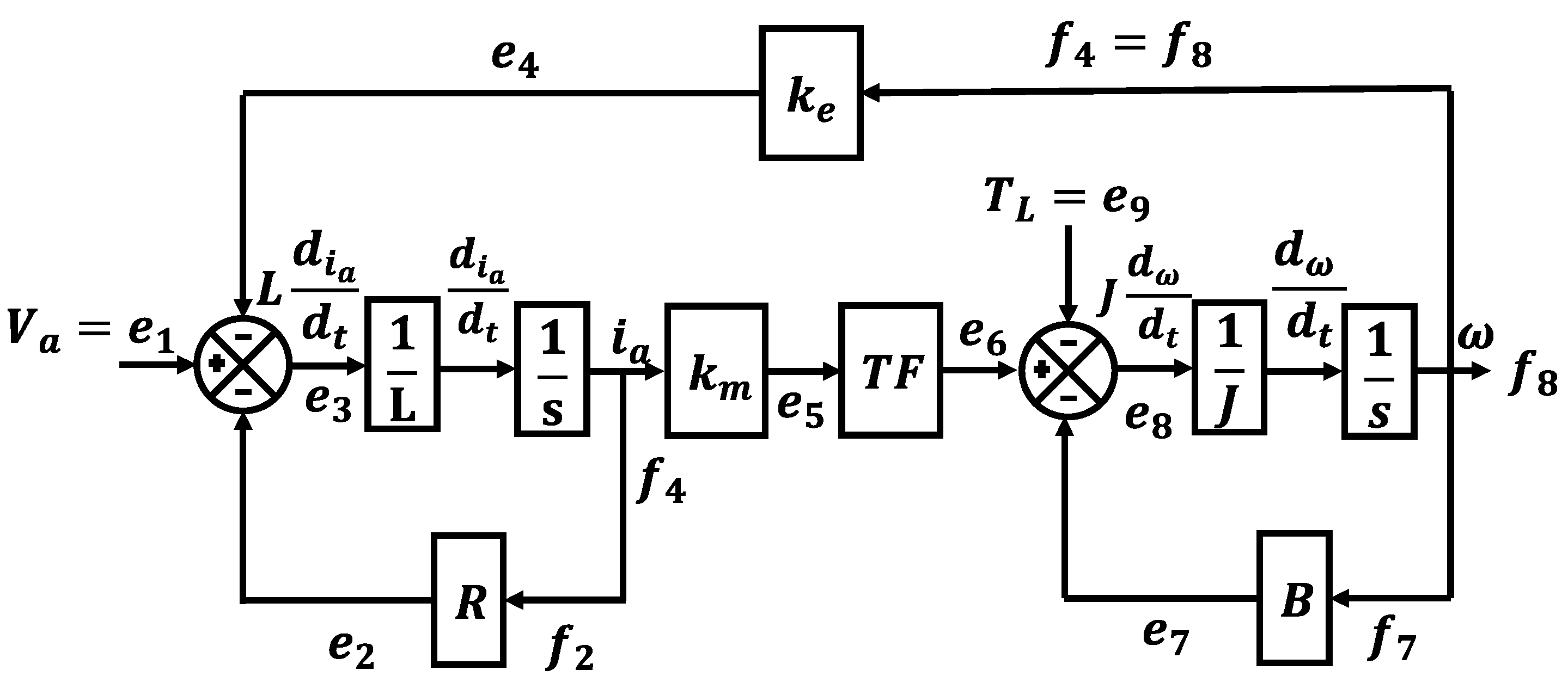
The block diagram can be derived from the bond graph method shown in
Figure 4. It analyzes the directions of energies and flows instead of complex mathematical calculations. The bond graph method is much more acceptable than the traditional learning method for the students.
The relation of all the components is in the flowing: the first 1–junction represents the common flow energy; the common flow is the current of the electrical circuit. The calculation of the 1–junction is the effort energy: , the output of the first junction is . Then, the equation is . The same concept applies to the second 1–junction, . TF is the gearbox and the are the GY parameters.
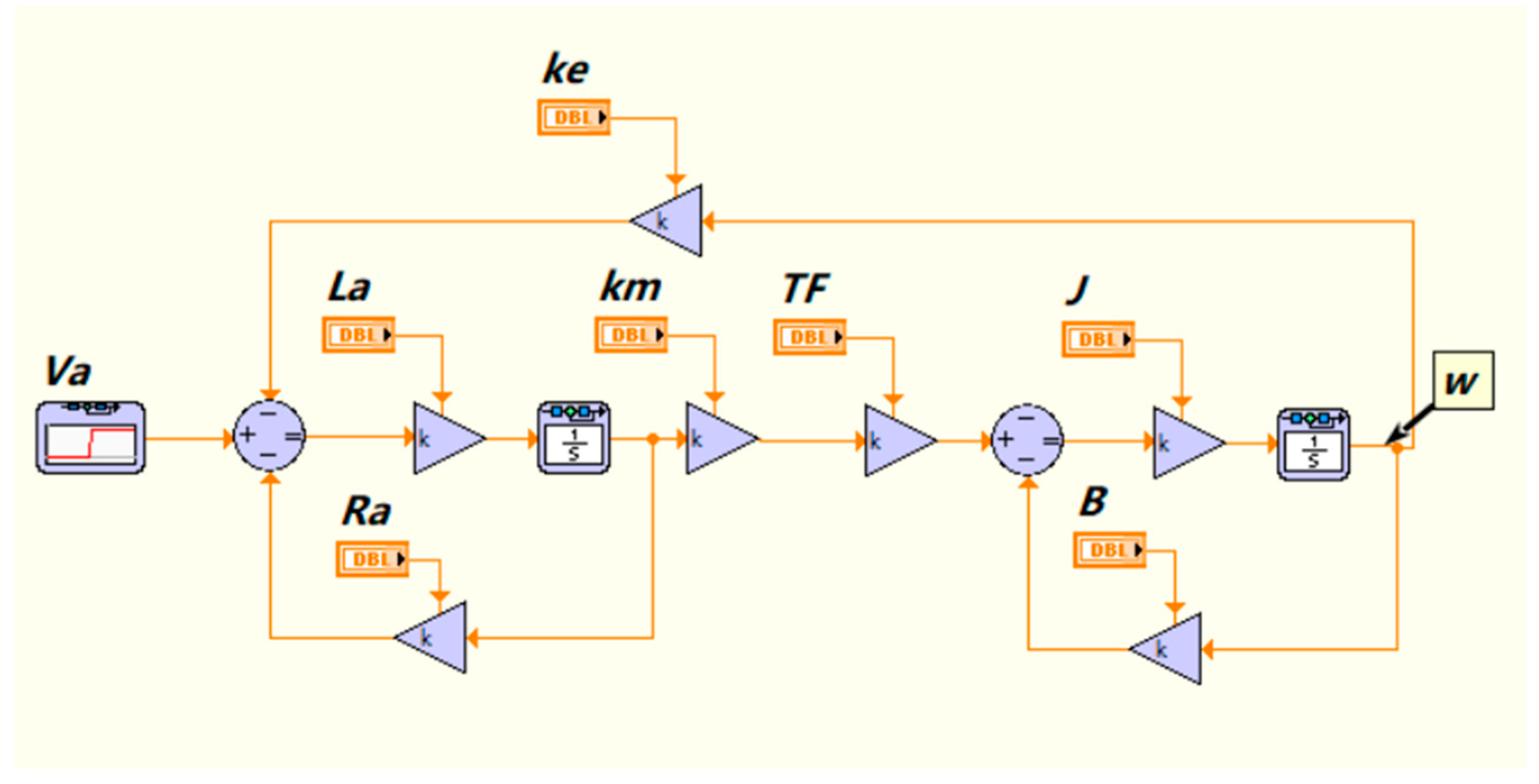
The final goal of the “modeling and simulation” subject is to study the performance or methodology comparison from the simulation data. The simulation software is LabVIEW–2014, and the LabVIEW code could be generated from the block diagram above shown in
Figure 5.
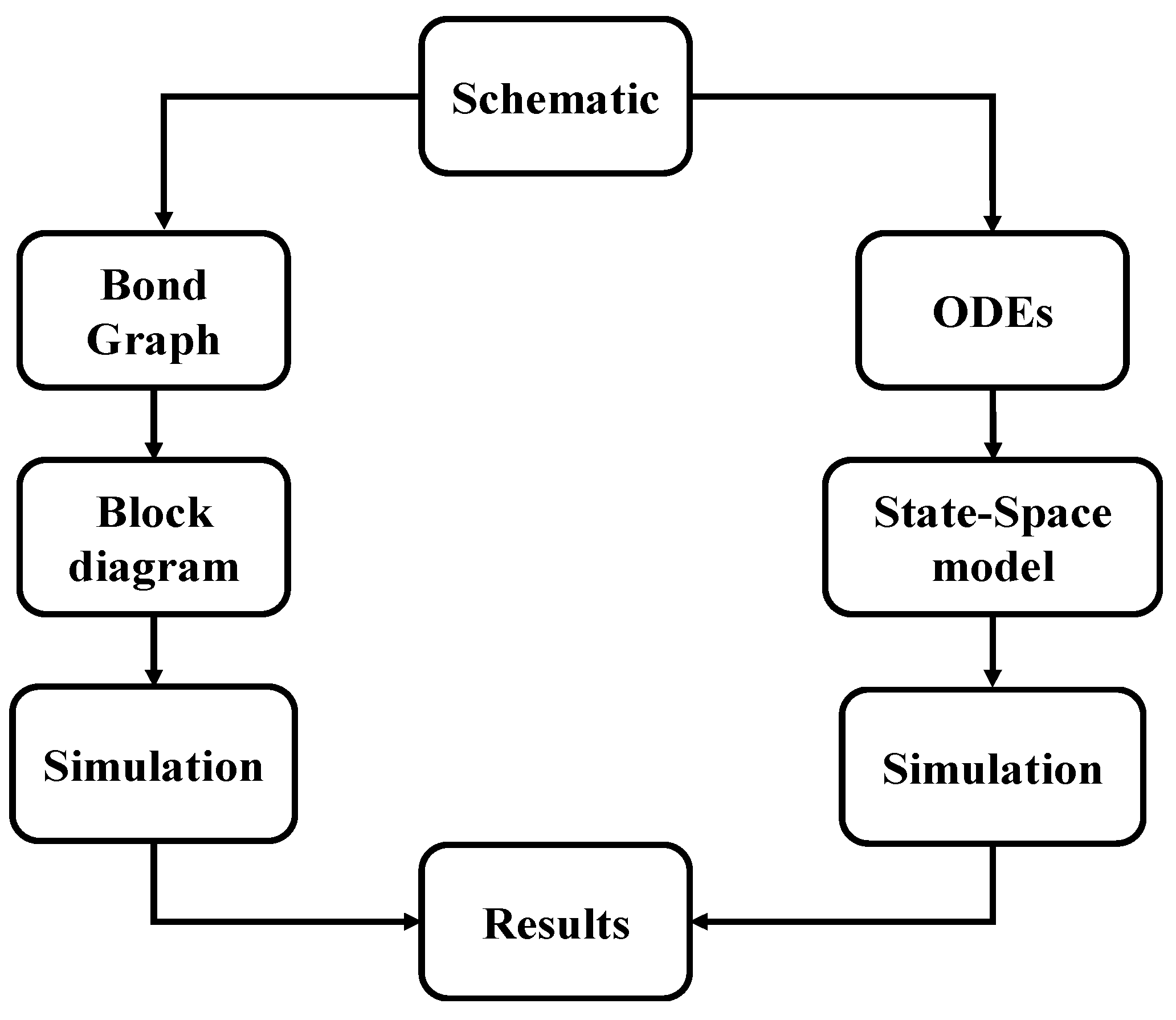
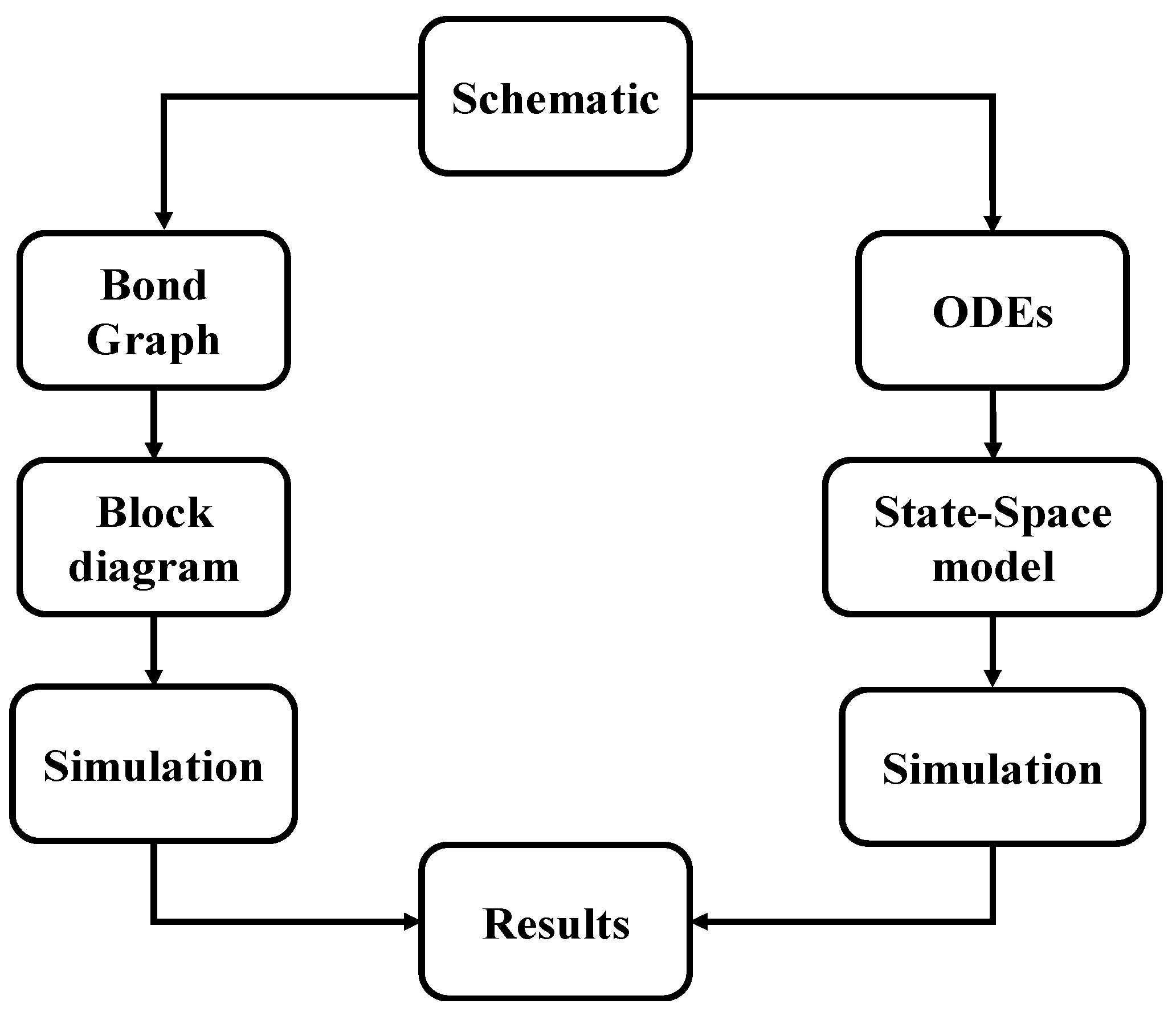
A comparison of the two methods is shown in
Figure 6. The right side is the traditional mathematical method using the ordinary differential equation (ODE) and state-space to derive the block diagram. The bond graph method is proposed on the left side, the bond graph could be converted from the schematic directly, and the block diagram can be derived by analyzing the bond graph energies’ flow.
The two methods are essentially the same with minor differences in details. The block diagram derived from the bond graph can implicitly explain the directions of energy flows. The bond graph is an efficient method to derive the block diagram. It does not mean that the bond graph method is better than the ODE; the bond graph method could provide a clear relationship of the whole system from the graphical point of view in mechatronics engineering. It could represent multiple domains using the same graphical language, which could enhance the synergy in the mechatronics engineering subject.
3. Linear Control with the Bond Graph Method for Undergraduate Students
This paper not only presents new teaching methods for the students but also provides teaching strategies. The teaching strategy is to make the knowledge modular; in the meantime, it could train students to think by themselves when they face a new assignment by building the knowledge brick by brick.
Linear control is a fundamental control method in the control theory. A PID controller is a typical controller for the DC motor speed control in the linear controller domain.
Modular knowledge could be demonstrated using
Figure 7. All the knowledge was taught to the students modularly; students could solve new tasks by integrating knowledge.
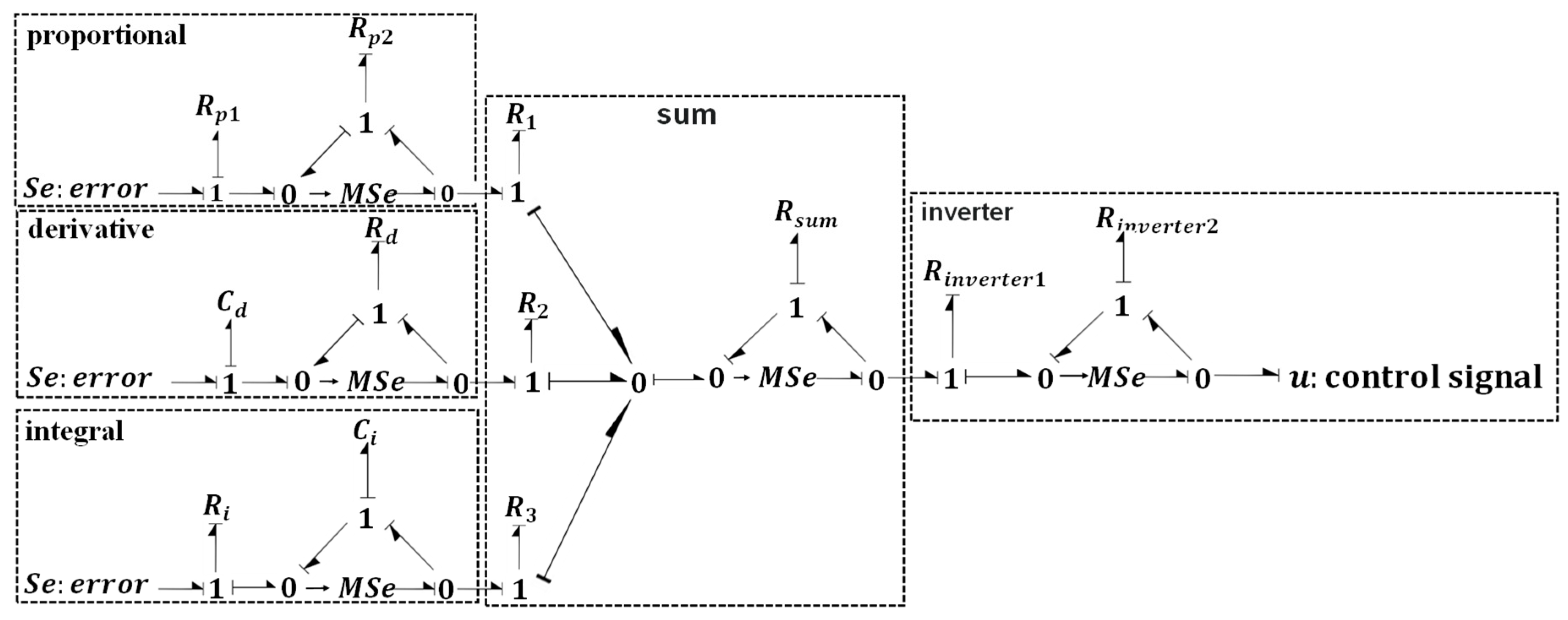
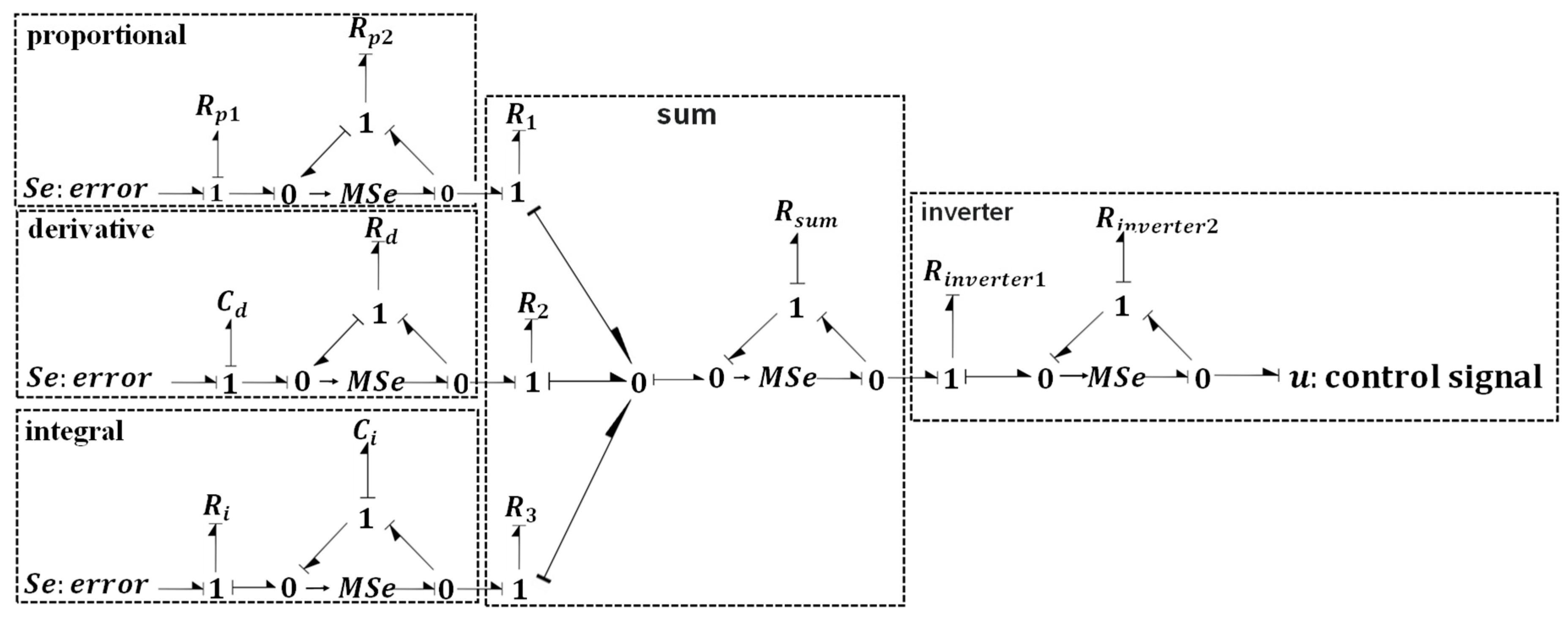
PID controller can be represented using the bond graph operational amplifiers separately. The bond graph of the PID controller contains an inverter operational amplifier, differential operational amplifier, and integral operational amplifier. The bond graph of the PID controller is shown in
Figure 8.
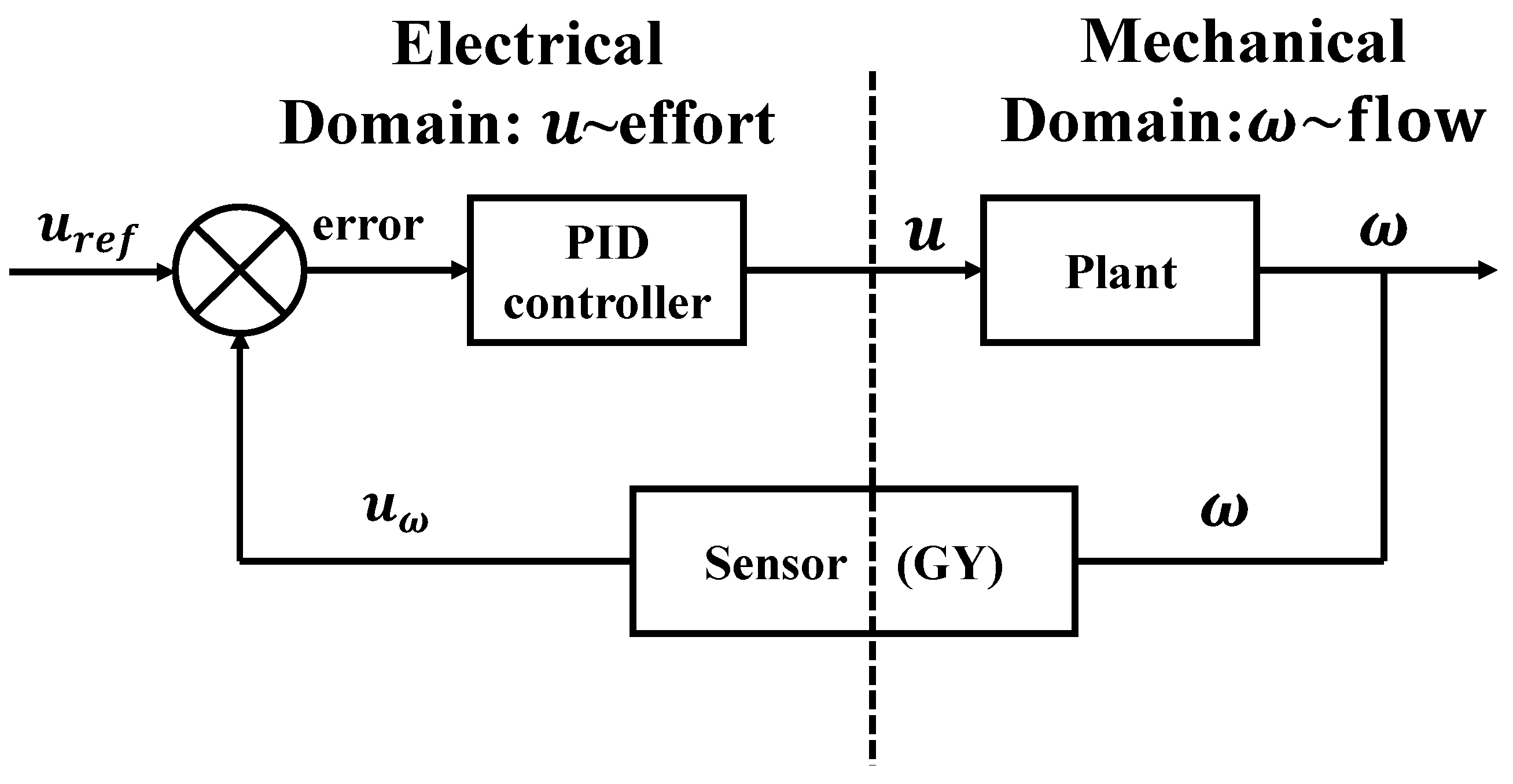
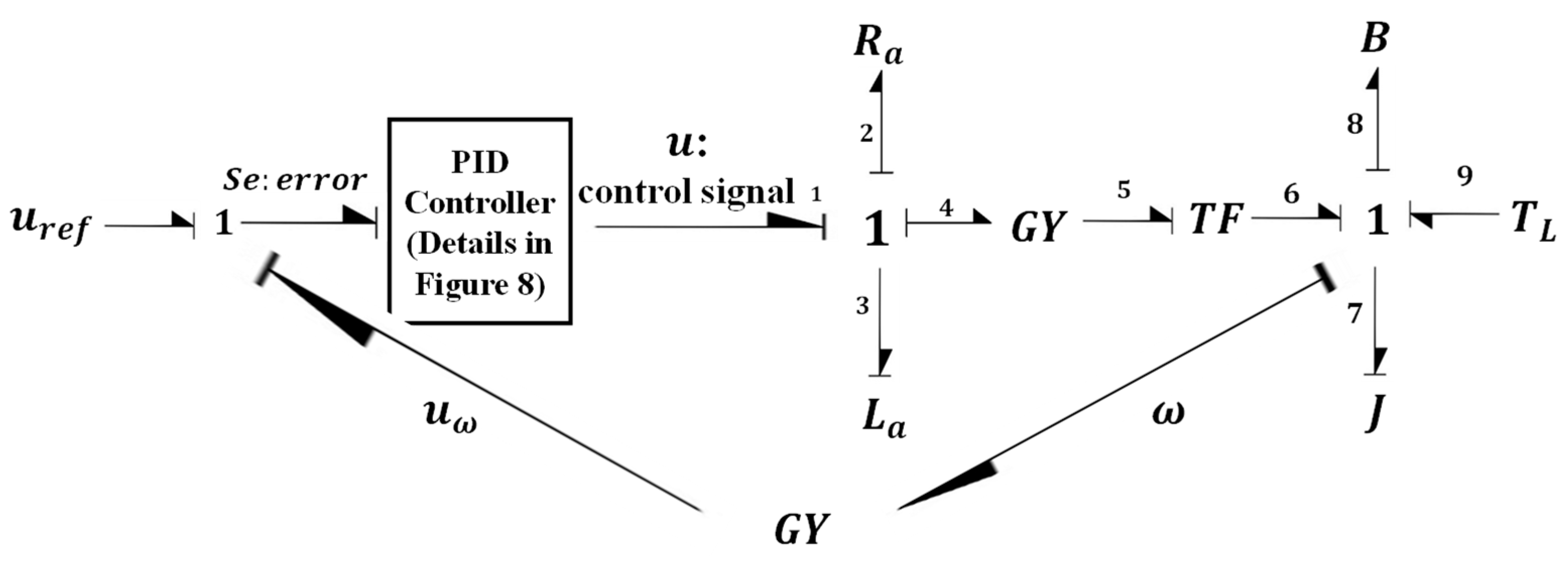
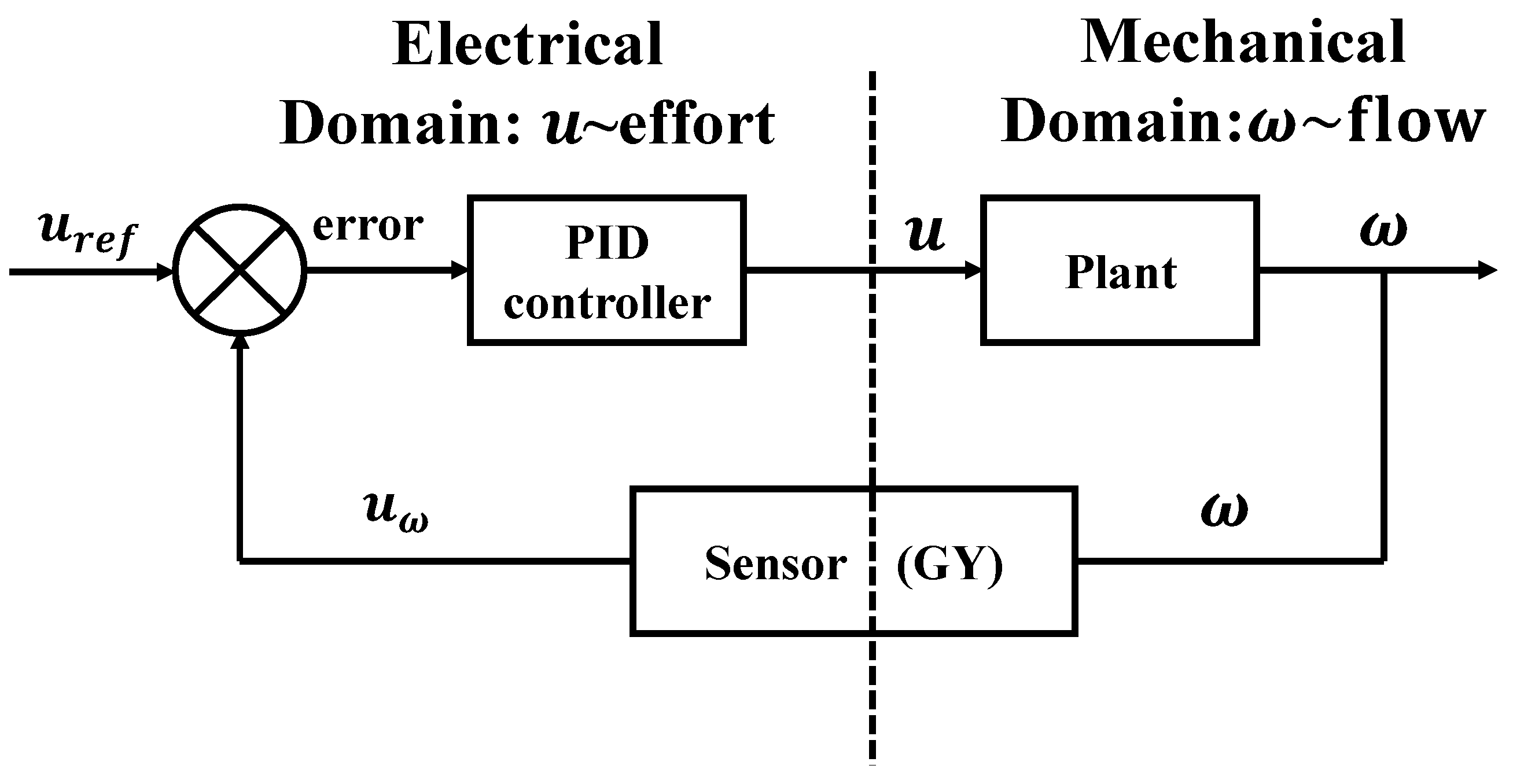
The bond graph of the PID controller is another main contribution of the paper. The input of the PID controller is the
, which represents the error between the reference input value and the measurement output value.
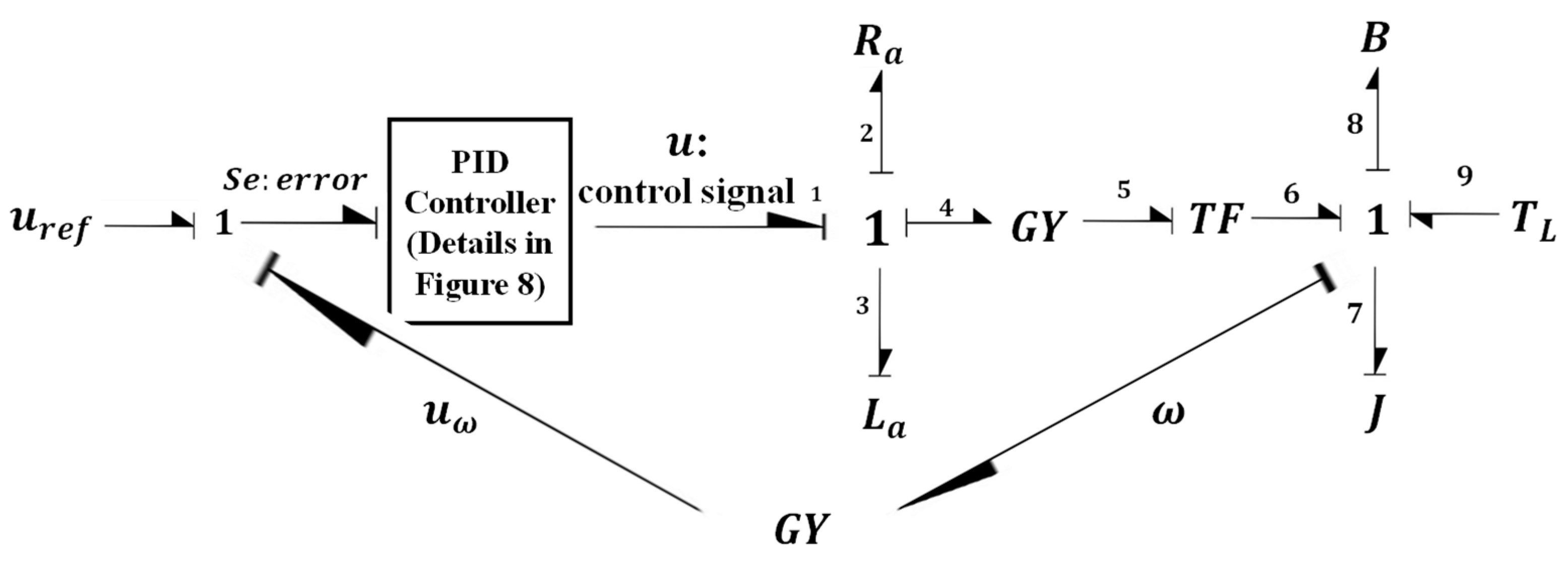
is the control signal of the DC motor plant. The bond graph of the DC motor speed control using the PID controller is shown in
Figure 9. The GY symbol on the feedback bond graph is a tacho generator, which can convert the flow energy into effort energy.
Figure 8 and
Figure 9 seem to be not simple enough for the electrical and control engineering students, but the figures could be a pleasant clear graphical language for the mechatronics students.
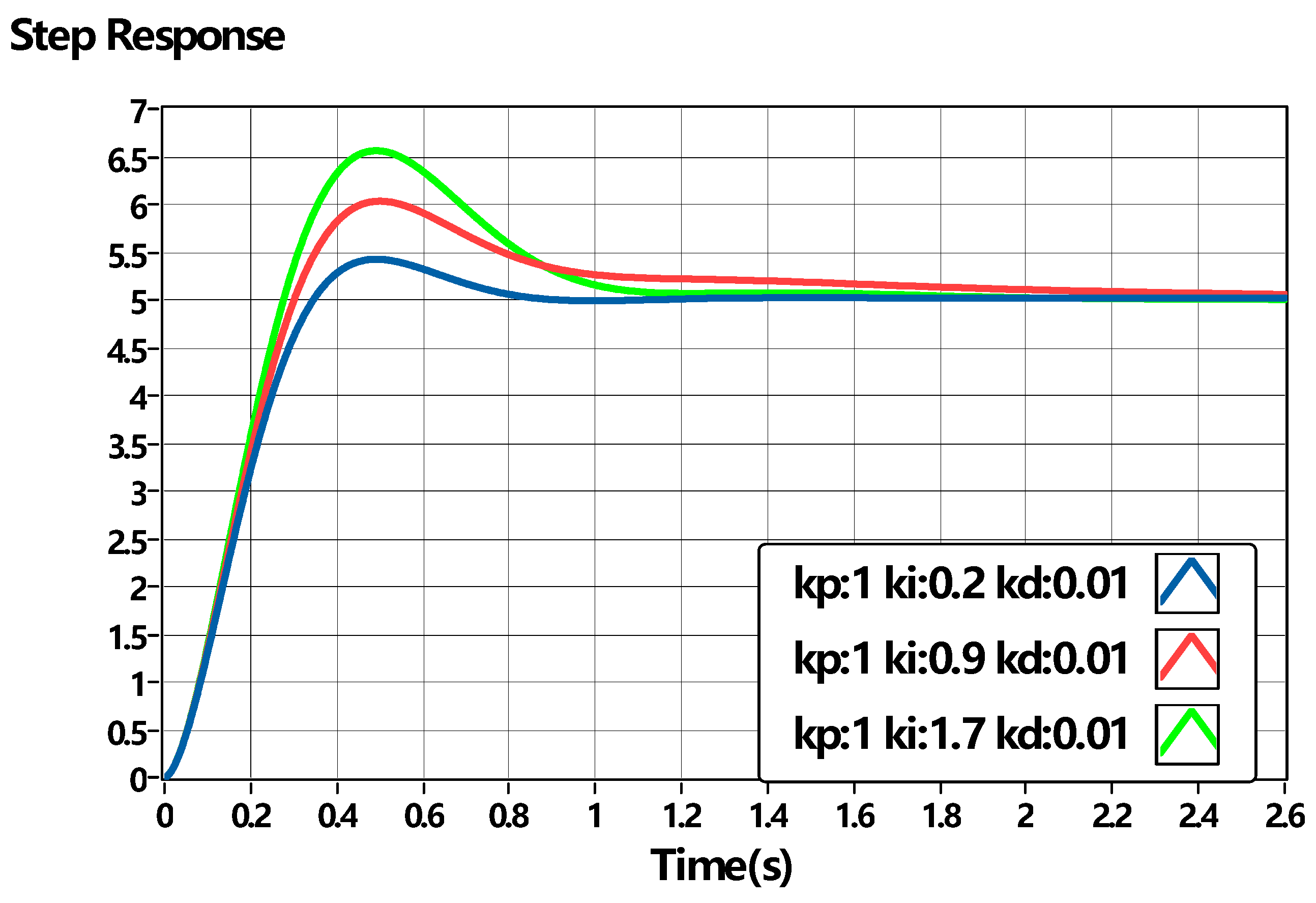
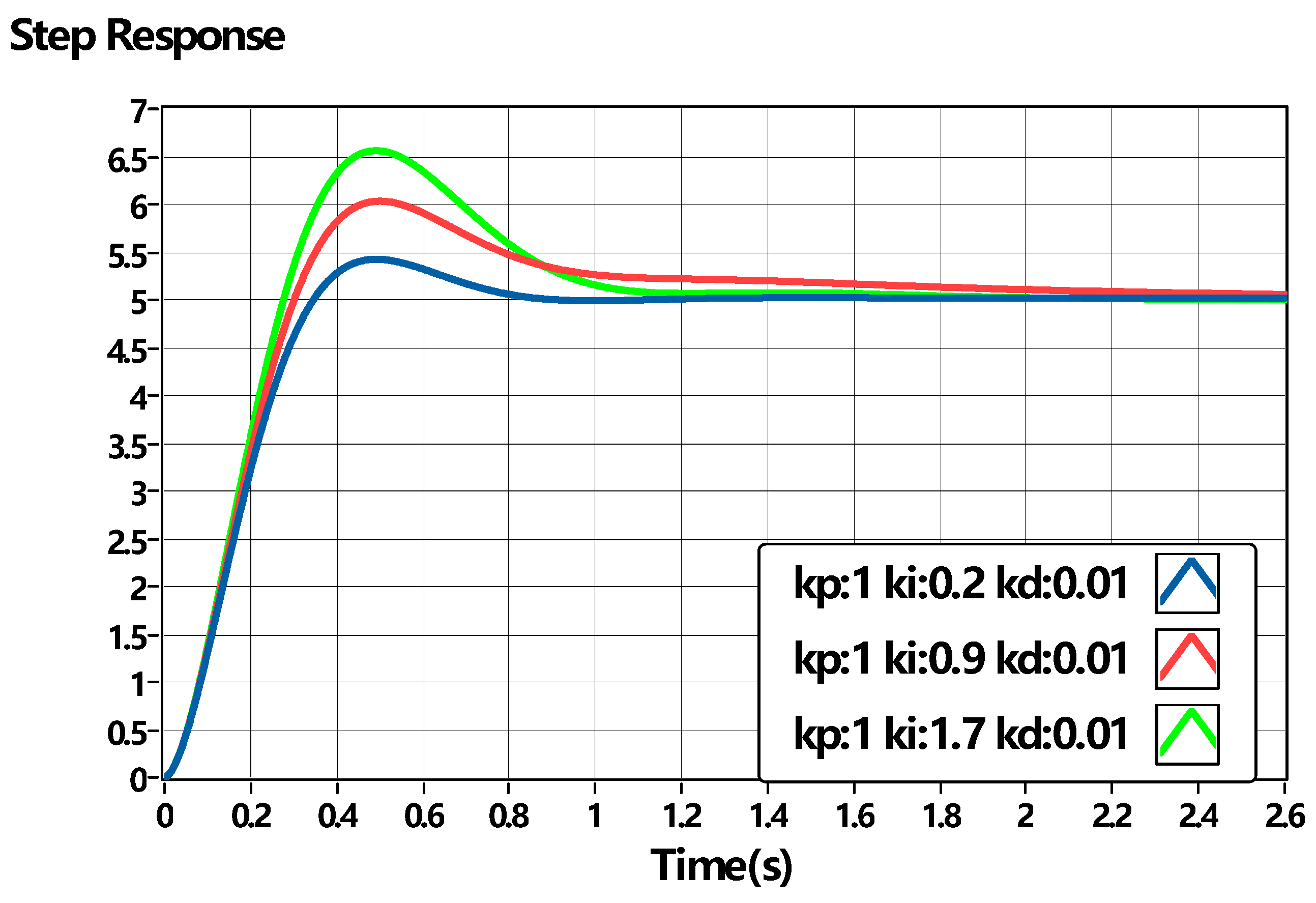
Figure 10 shows the step response of DC motor speed control using the PID controller with different
. The overshoot of step response increases with the increases in the
, Where
. The results of the two methods are the same.
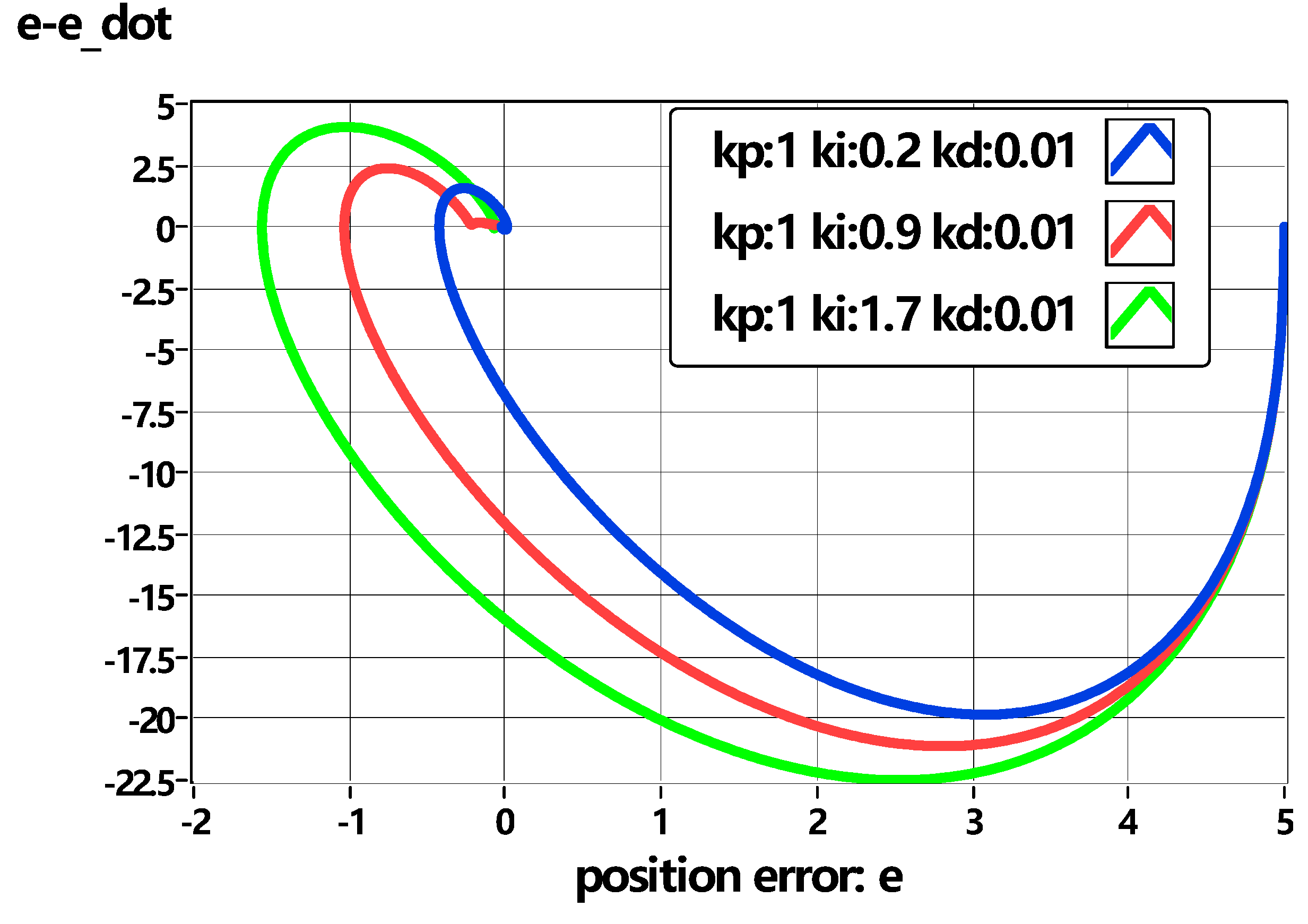
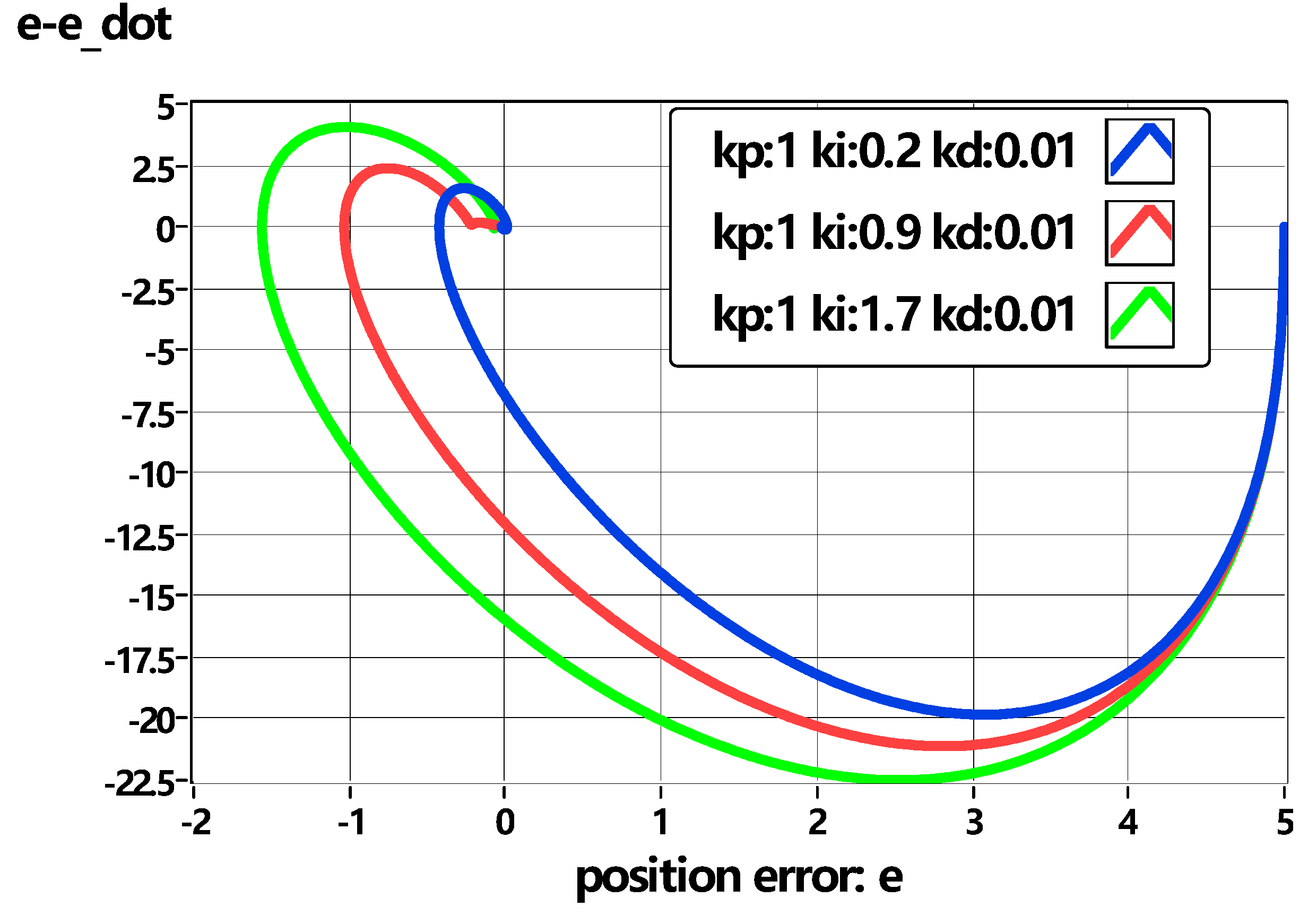
The plots can help students understand how the controller parameters affect the simulation results. Trajectories
of the PID controller could express the characteristics of convergent performance.
represent the position error and velocity error, respectively, in
Figure 11. All the trajectories converge to the origin point in a finite time. The position error increases with the increase in
.
The plots of the simulation from both methods are the same, but the methods to obtain the simulation result are different. The bond graph method could be considered a novel and powerful tool to solve simulation problems in mechatronics engineering.
4. Nonlinear Control with the Bond Graph Method for Undergraduate Students
Nonlinear control was introduced to the master students at first in the mechatronics engineering faculty at the University of Debrecen. With the iterative update of knowledge, the acceptance of nonlinear control for undergraduate students has increased. The nonlinear control is reintroduced in the undergraduate teaching materials because the sliding mode is complex enough in the theoretical part and simple enough for undergraduate students to implement. The sliding mode controller is one of the most efficient nonlinear controllers, which would apply to the BSc teaching curriculum. This section presents a normal sliding mode controller for position and speed tracking. Then, an adapt robust sliding mode controller method is introduced using the general model and real DC electrical machine parameters, respectively.
4.1. A Very Simple Sliding Mode Controller for Education Aim
The equations of the DC motor,
and (
), can be written in the following simple second-order form:
where
is the moment of inertia;
is the control input, i.e., the voltage of the motor; and
is the disturbance, which must be a limited function. It can include external functions like the load torque and the internal first-order terms because of
and
. This means that, in this case, we do not need to know all the parameters of the motor, only
is known exactly. We would like to emphasize to the students that during the design of the controller, the inductance of the rotor circuit (the electric time constant) is ignored. We consider it as unmodelled dynamics, which is covered by the controller. It is quite common in the engineering field that we start with a simple model. The goal is to use the simplest model, which provides satisfactory results.
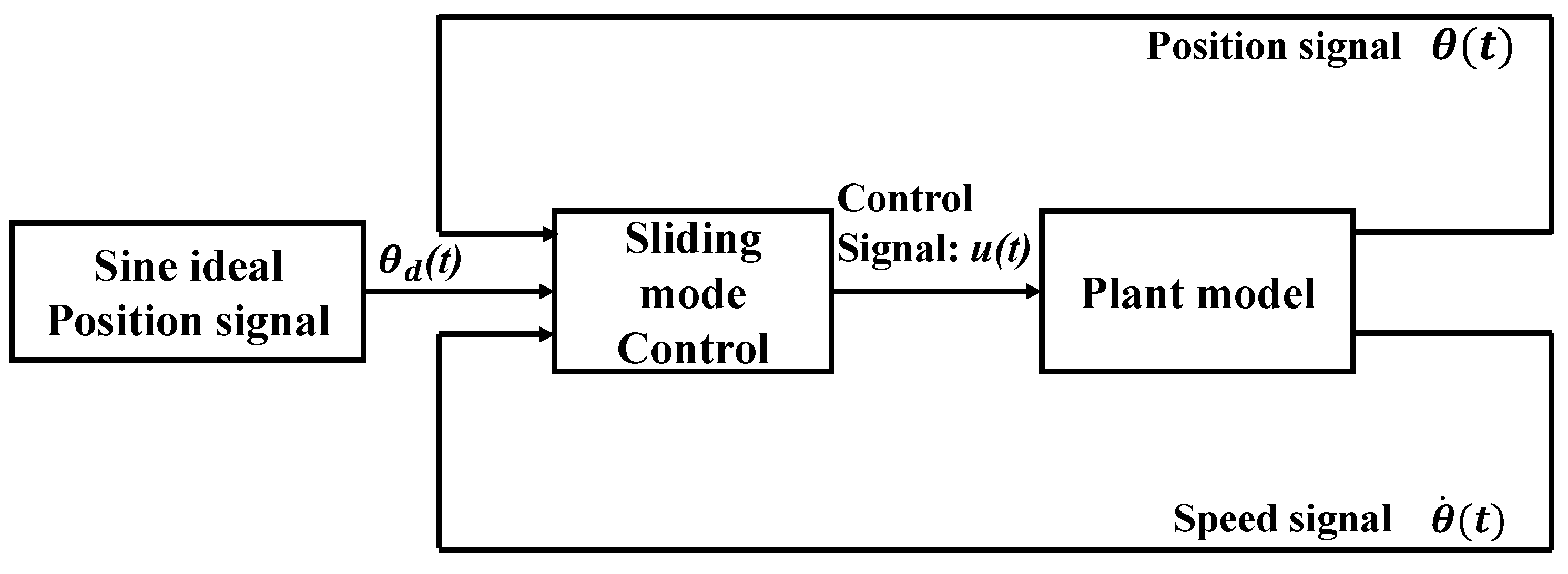
The sliding surface is designed as follows:
where
is satisfied Hurwitz condition,
. Tracking error and tracking error derivative are shown as follows:
where,
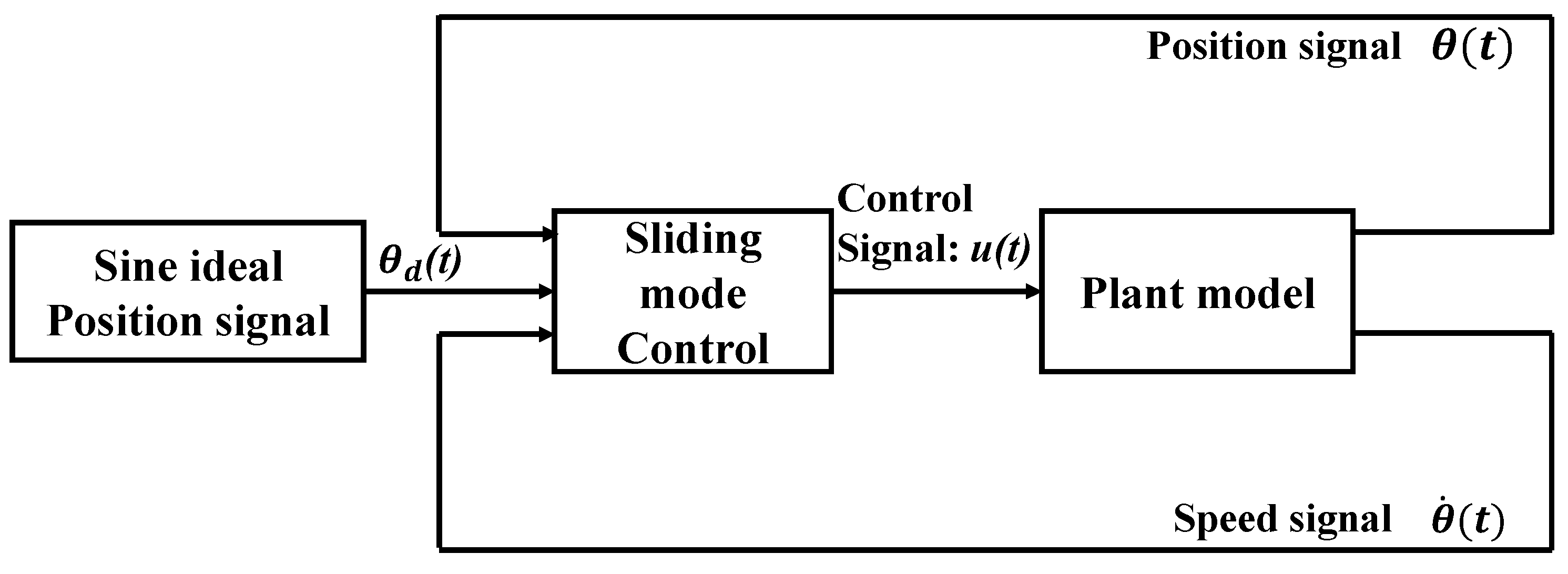
is the ideal angle signal. A general sliding mode control block diagram shows in
Figure 12.
Our goal is that . The sliding mode occurs if . In sliding mode, the error tends to zero exponentially. The solution is quite easy from the mathematical point of view; we have to find a proper Lyapunov and use the Lyapunov condition. We will show this method in the next subsection but in our case, it can be explained by very elementary mathematical tools as well. If , then must be decreased, i.e., . If than must be increased, i.e., . The students can understand it. In other words, the signs of and must be opposite, so we ask the students to express and substitute and in the resulting formula. We can change the control signal only. That is why we use a term in the control signal which changes according to the sign of The easiest solution is the signum function. Finally, they can express the control signal . We can ignore all unknown terms of it and we assume that is big enough to determine the sign of . Since the operation area of a real motor is limited, the is limited as well.
In a certain area of
, a very simple control law can be applied:
where the choice of
must meet two contradictory conditions. If
is too small, it cannot compensate for the disturbance; if it is too large, the chattering phenomenon causes problems. Therefore, it is advisable to calculate the so-called equivalent control signal
, which ideally keeps the system in sliding mode.
The sign function has to compensate for our calculation error only. If the system is in sliding mode, then
and
, the equivalent control can be calculated from the latter.
Since
is not known, it can be substituted by the signum function and the control signal
designed as
In this case, a smaller
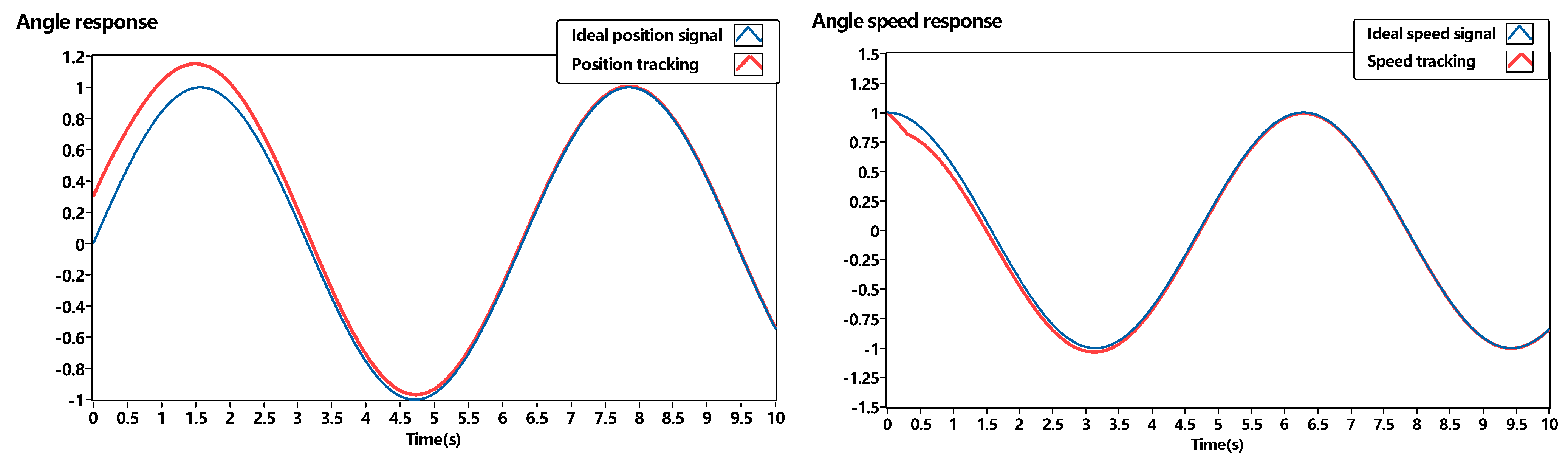
can be selected and the chattering can be reduced. The moment of inertia
,
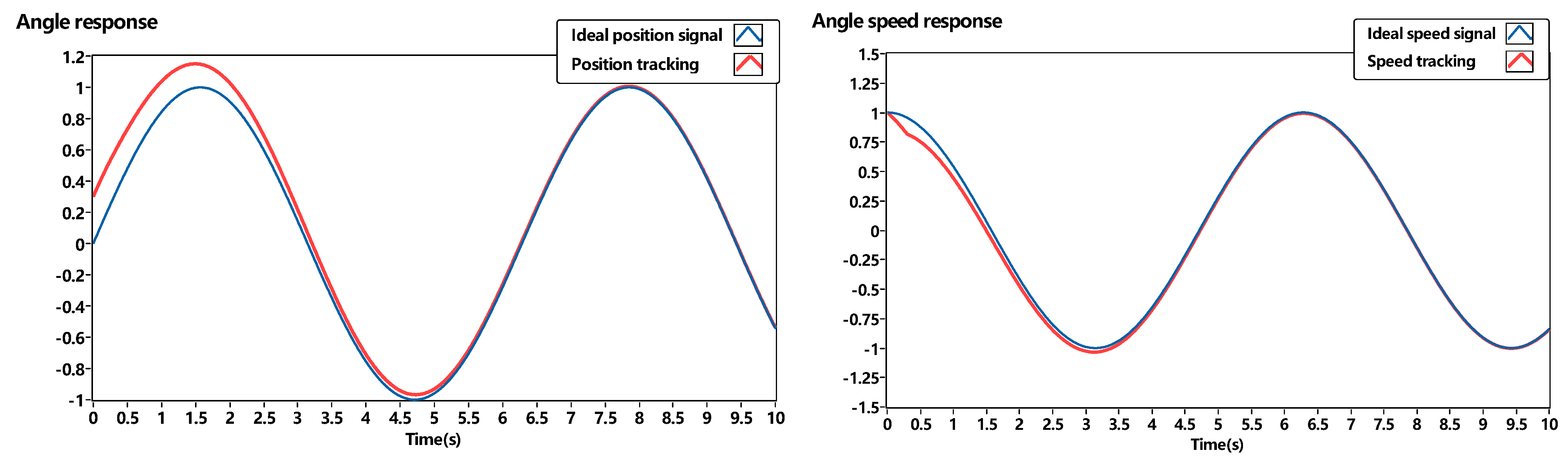
, position target, and speed target initial condition are set to 0.3 and 1.0, respectively.
,
. The result simulation of position and speed tracking is shown in
Figure 13.
The position and speed tracking performance is shown above. Some conclusions can be derived from the plots, the initial condition of the position affects the tracking performance in the general sliding mode controller. The speed tracking does not perform well even if the initial speed is the same as the ideal signal. An adaptive robust sliding mode controller is introduced to overcome the tracking error problem in the following section.
4.2. An Adaptive Robust Sliding Mode Controller
Adaptive control is a control method that can modify its characteristics to adapt to the changes in the dynamic characteristics of the target and disturbances. Robust control means that the control system maintains certain performance characteristics under certain parameter perturbations. By applying the adaptive robust sliding mode control, the position and speed tracking could track the ideal target well [
33].
In the previous section, we emphasized that is exactly known. Now, we also allow parameter uncertainty in the case of inertia. Since this parameter uncertainty is also limited, it can also be included in the disturbance signal . In this section, as a didactic innovation, we present a method where the uncertainty of the parameter is not considered part of , but is calculated separately in such a way that the sliding mode control is combined with the estimation of a parameter. Parameter estimation itself is part of the curriculum.
The real and estimated inertia are
and
. The estimation error is
Our goal of is extended by an additional goal .
The Lyapunov function consists of two terms one for
and one for
.
where
and
.
can be zero only if
and
, but these are our goals. If
, then
must be negative. Let us calculate
,
Substituting
and
into Equation
,
The equivalent control signal is calculated from the first term of
Since
is inertia, then
. This means,
as a multiplier, does not change the sign of the product. It is not known, so it can be substituted by its estimation,
. Two terms (
and
) are added to the equivalent control signal since in addition to suppressing the disturbance, parameter adaptation must also be ensured. If
is big, then
is dominant; if
is small, then
is dominant. The control signal designed in the following way can ensure convergence to the sliding mode:
where
. Besides the control, a proper adaptation method must be selected as well. Substituting
) into
,
Equation
can be derived as
Then, the adaptation law is selected by the last term of
, which must be zero. Then, the adaptive law can be set as
4.3. Analysis and Fine-Tuning of the Adaptation
When , , where . When , . When , . The convergence of the system depends on the .
In order to prevent the control input signal
from being too large due to too large
, it is necessary to design the adaptive law so that the change in
is within the range of [
]. A mapping adaptive algorithm is shown as
When exceeds the maximum value, if there is a tendency to continue to increase, , then the value of remains unchanged, then ; when exceeds the minimum value, if there is a tendency to continue to decrease, , then the value of remains unchanged, .
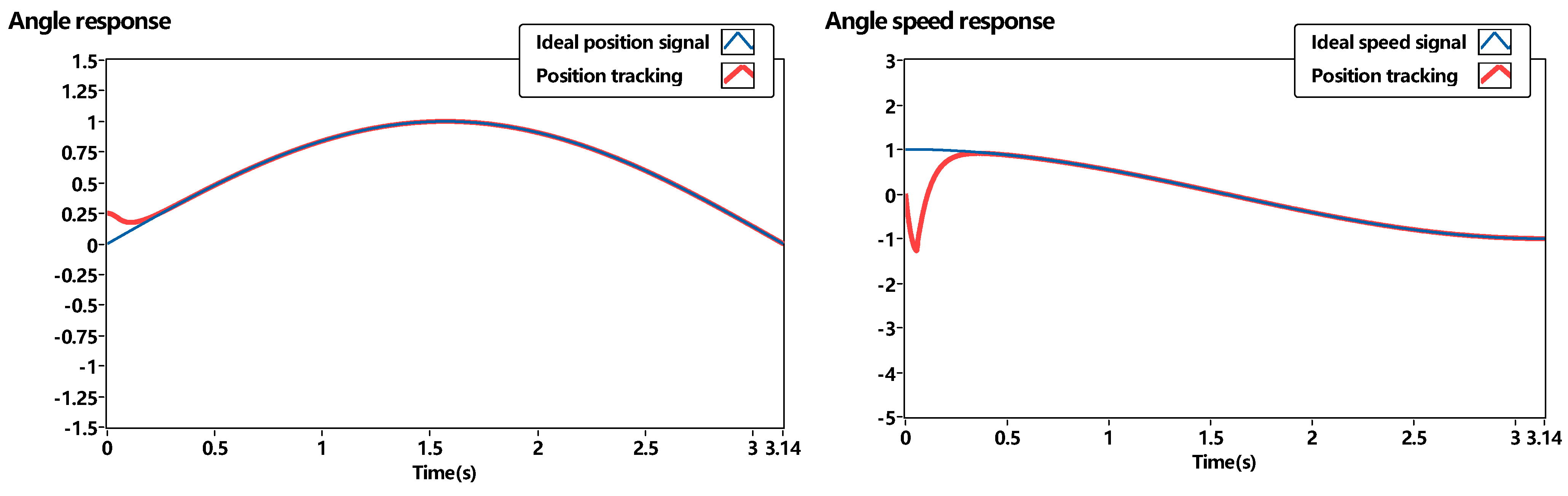
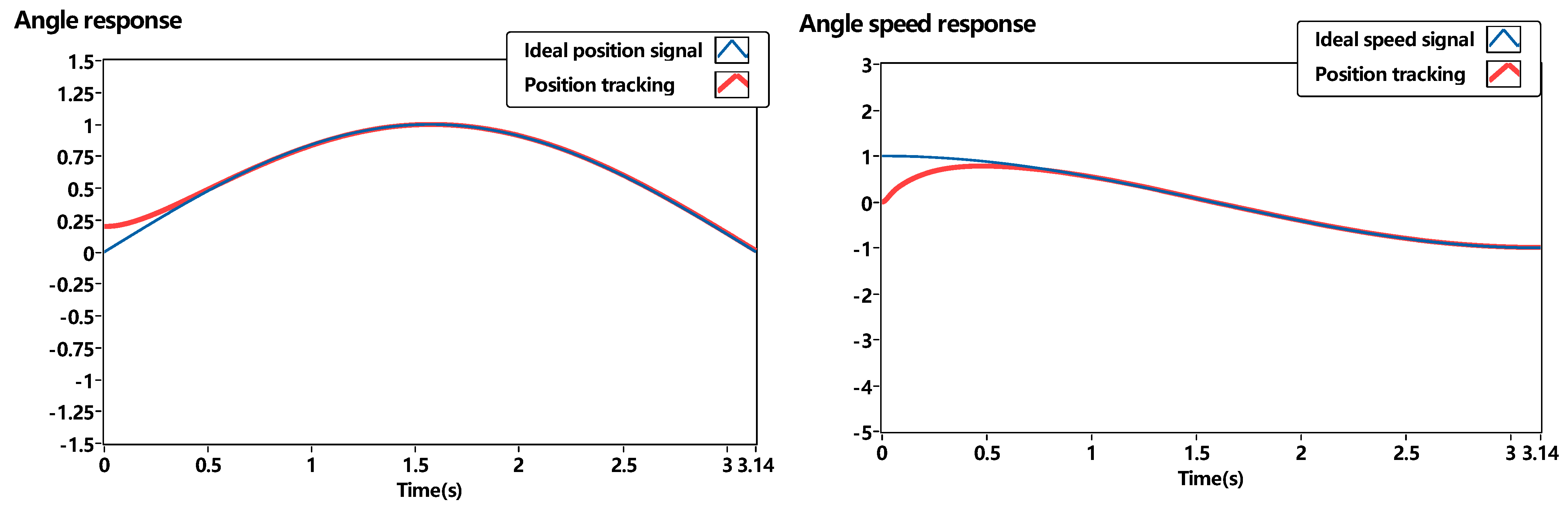
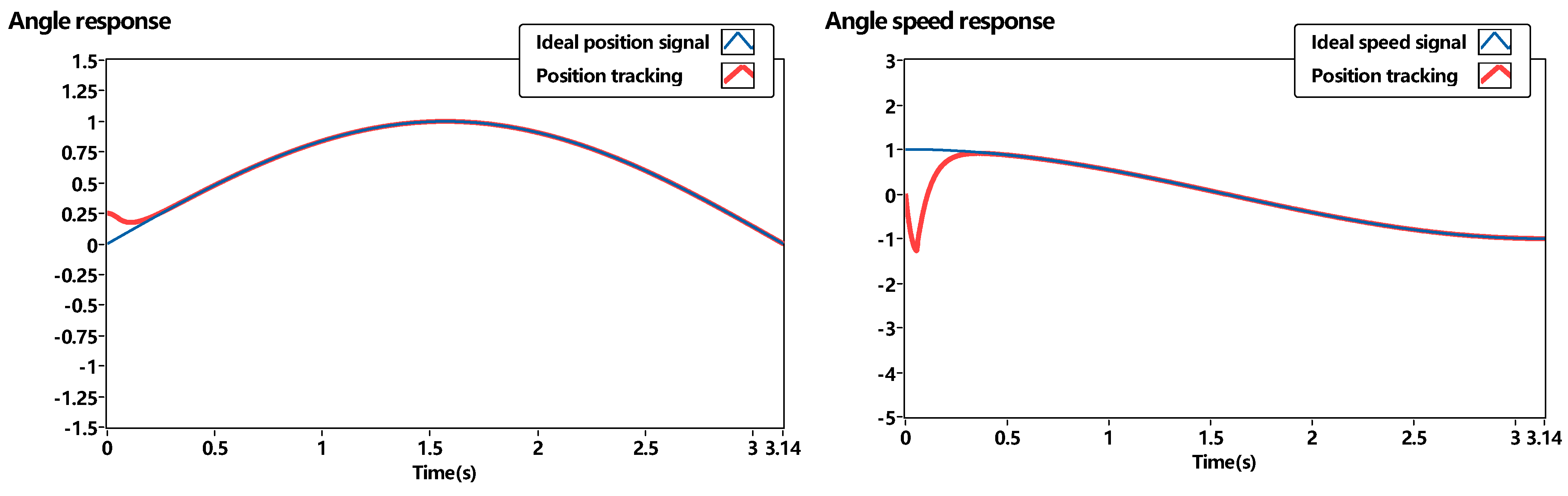
The position and speed tracking performance are shown in
Figure 14. The initial condition of the position and speed are set to 0.25 and 0, respectively, where
and target position signal is set to
,
,
,
,
, and
.
. The control signal
is designed as
, where
is the adaptive control part. Here,
.
is the sliding mode equivalent control.
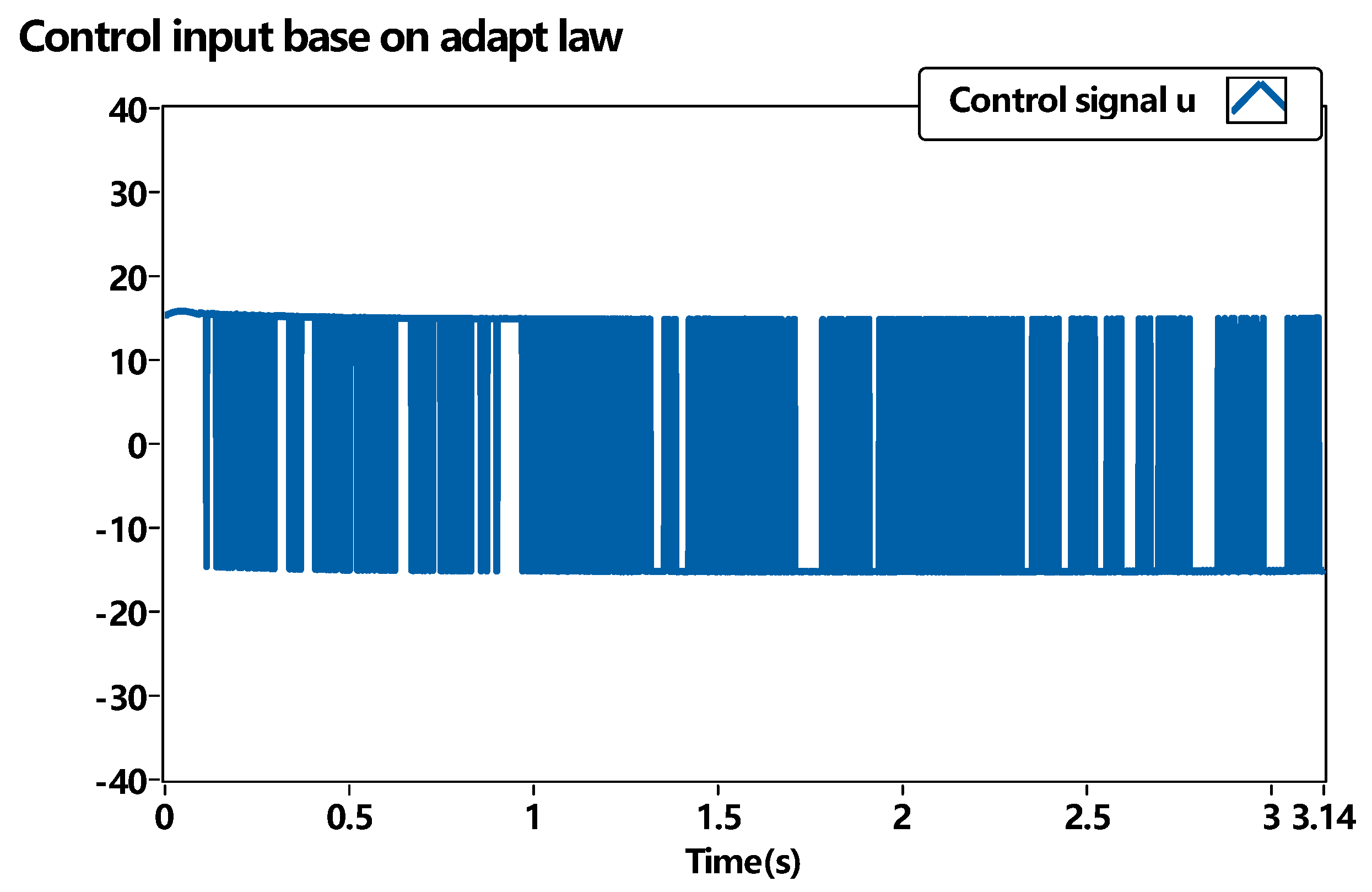
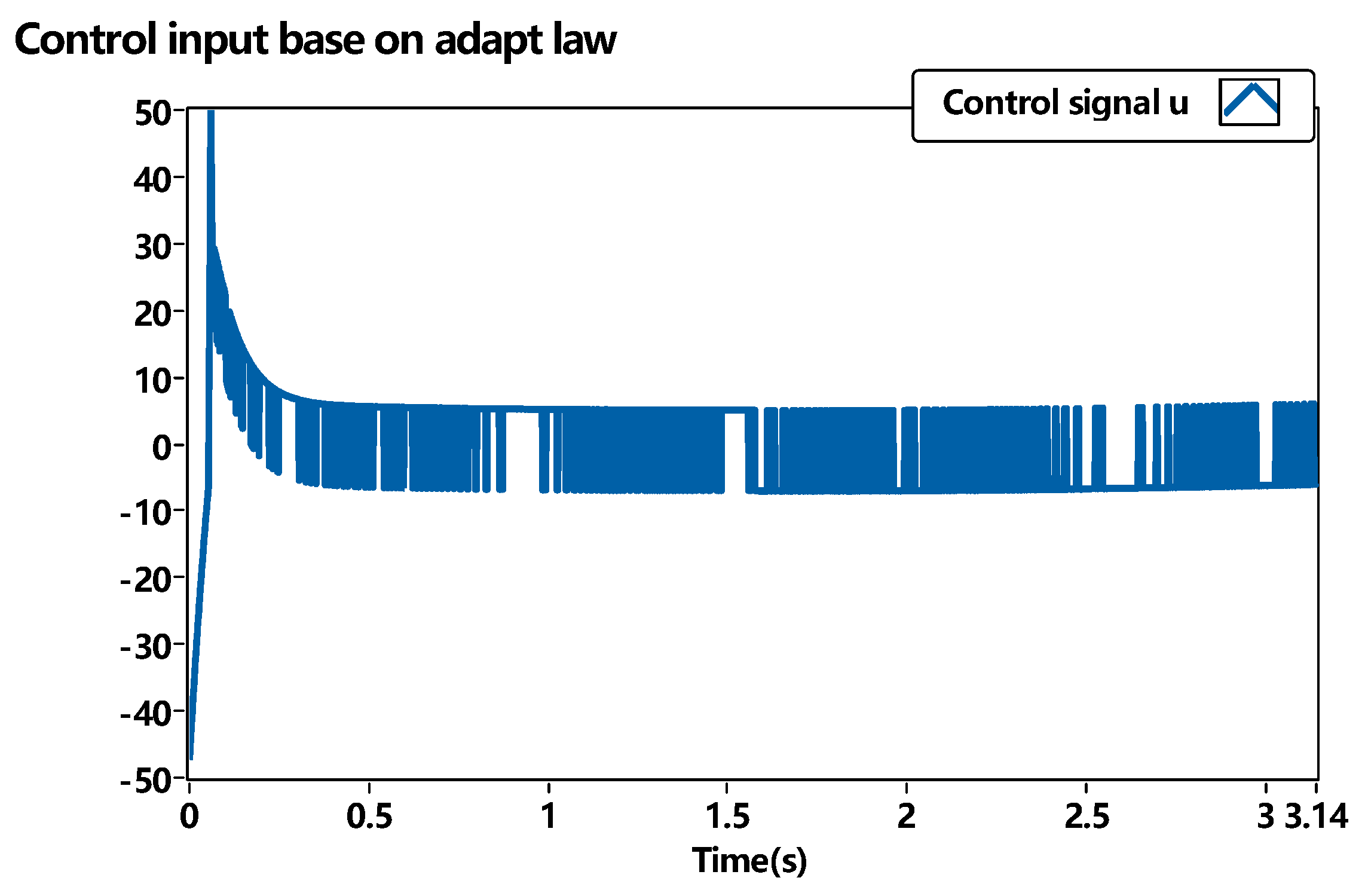
is the sliding control unit. The control signal
can be limited by the adaptive law in
Figure 15.
4.4. Adaptive Sliding Mode Controller Using Real DC Motor Parameters
After applying the simple sliding mode control and adaptive sliding mode control to the basic target model, the real DC motor parameters from
Table 1 are applied in the adaptive sliding mode control.
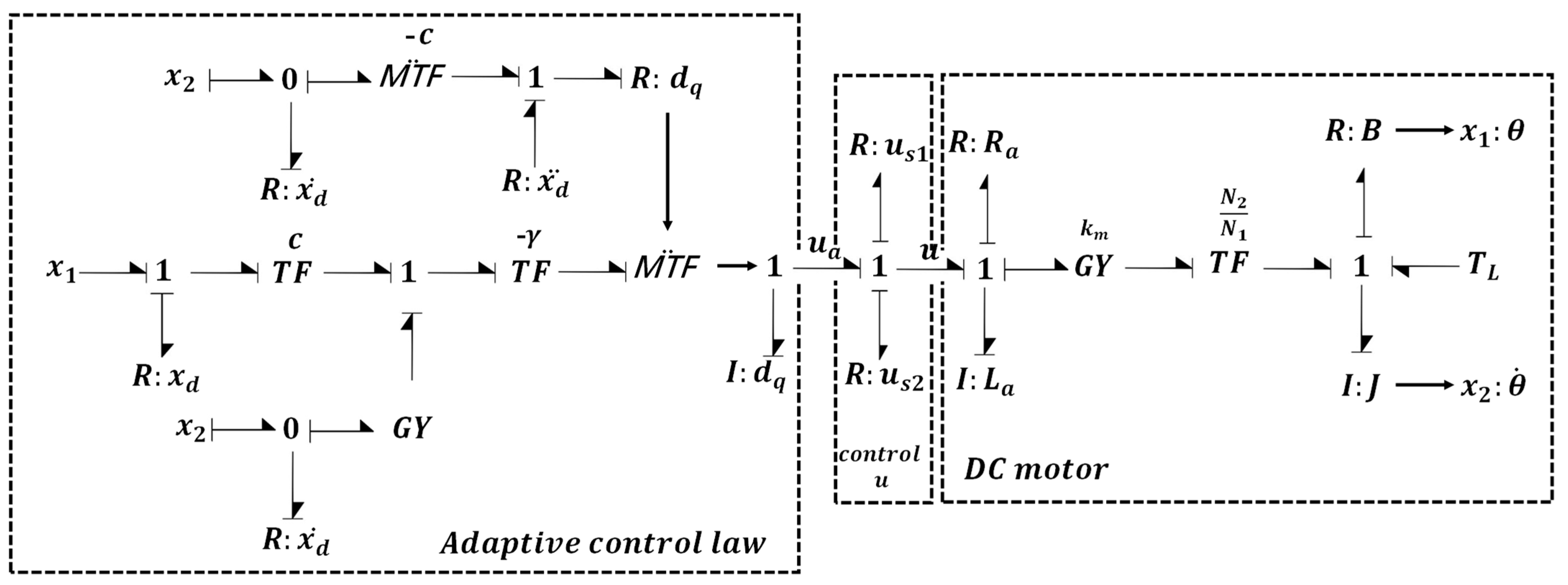
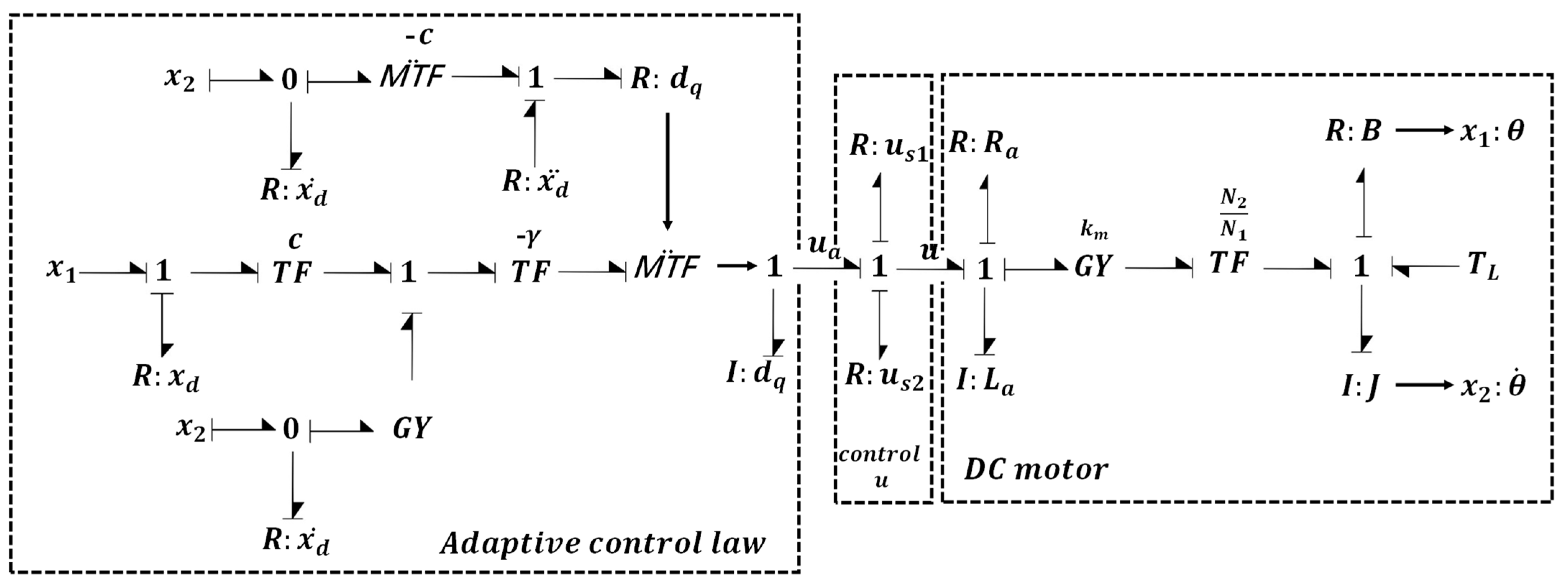
Another main contribution of this paper is to introduce the way to represent the sliding mode by using the bond graph method. The Bond graph of the adaptive sliding mode is shown in
Figure 16. Compared with the mathematical equations, the bond graph method above presents all the energy flow of the adaptive robust sliding mode control. The elements
and
are the type of energy in the bond graph.
is the modulated transformation; it can be considered as a gain in the bond graph.
and
are the position and speed, respectively, in the control loop.
is the ideal position input.
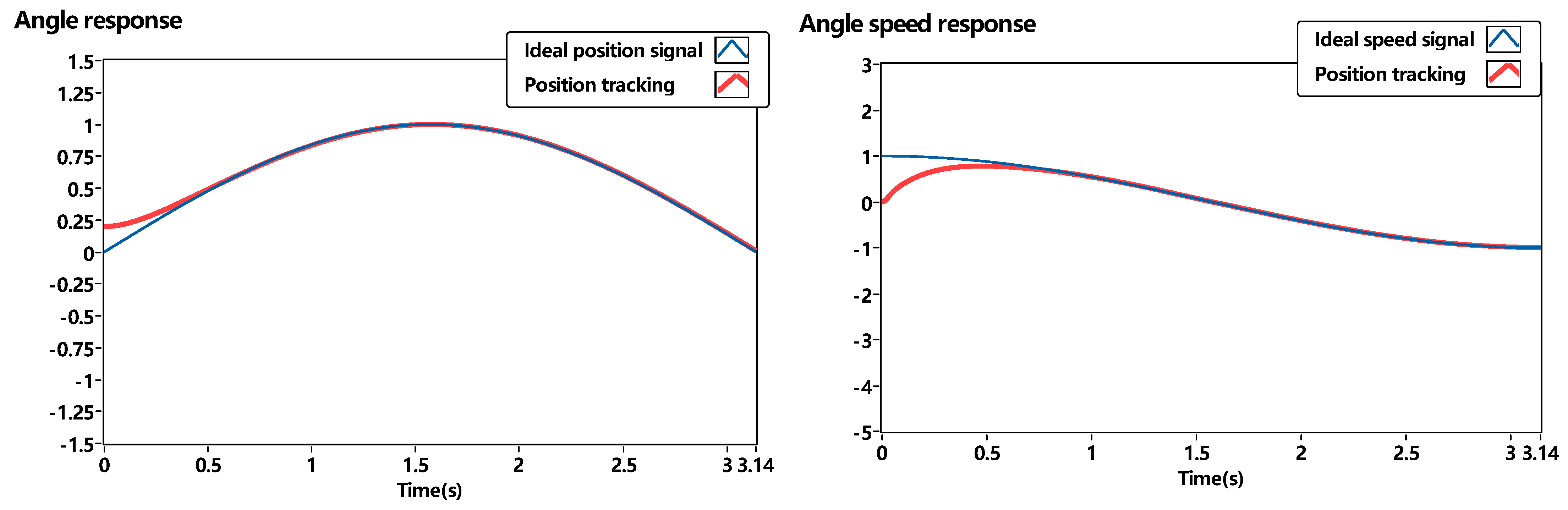
The position and speed tracking are shown in
Figure 17; the position and speed initial condition is set to [0.2, 0.0]. The position performance can track the ideal position in a very short period, and the speed has no oscillation as the initial point differs from
Figure 14.
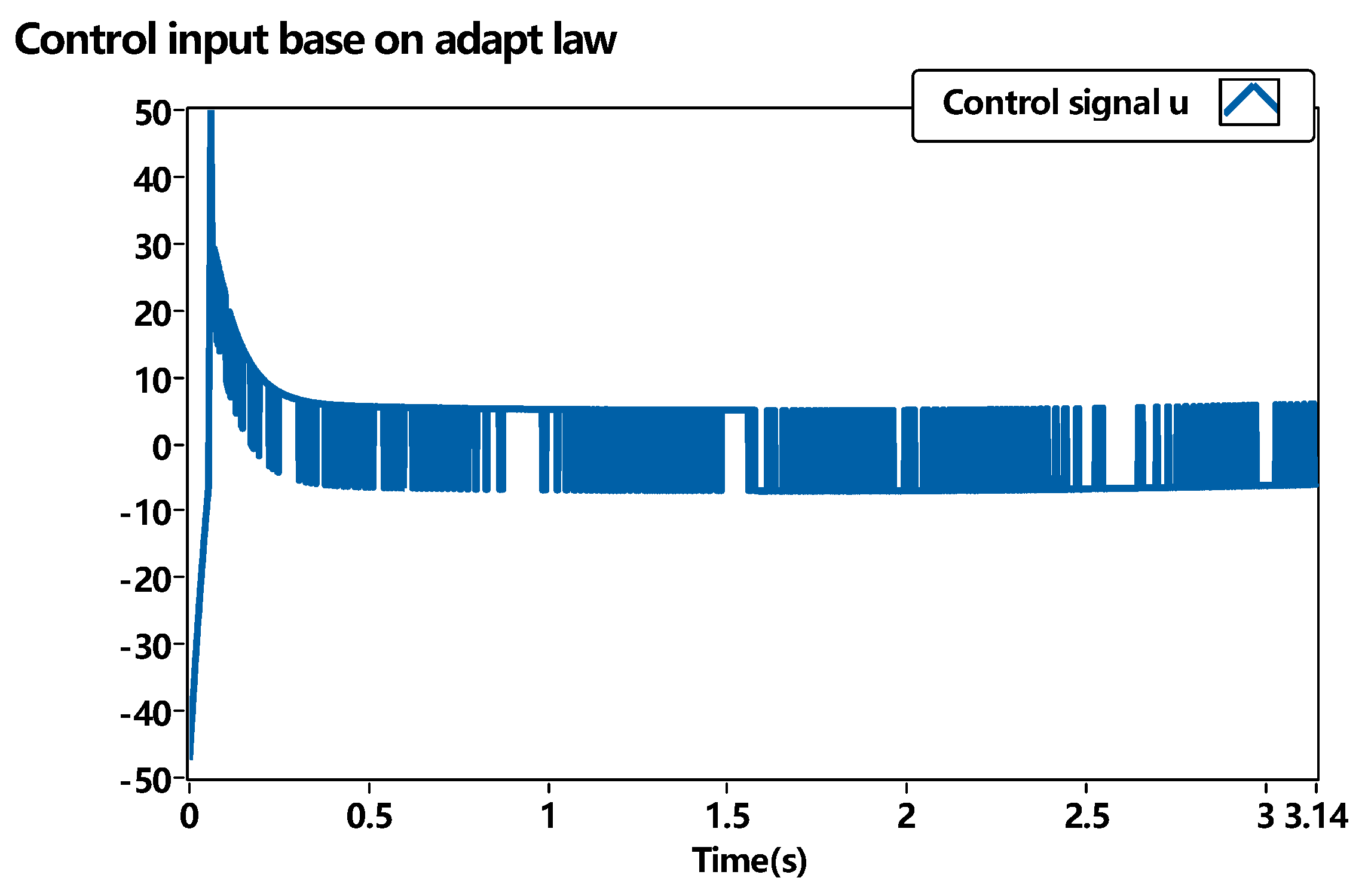
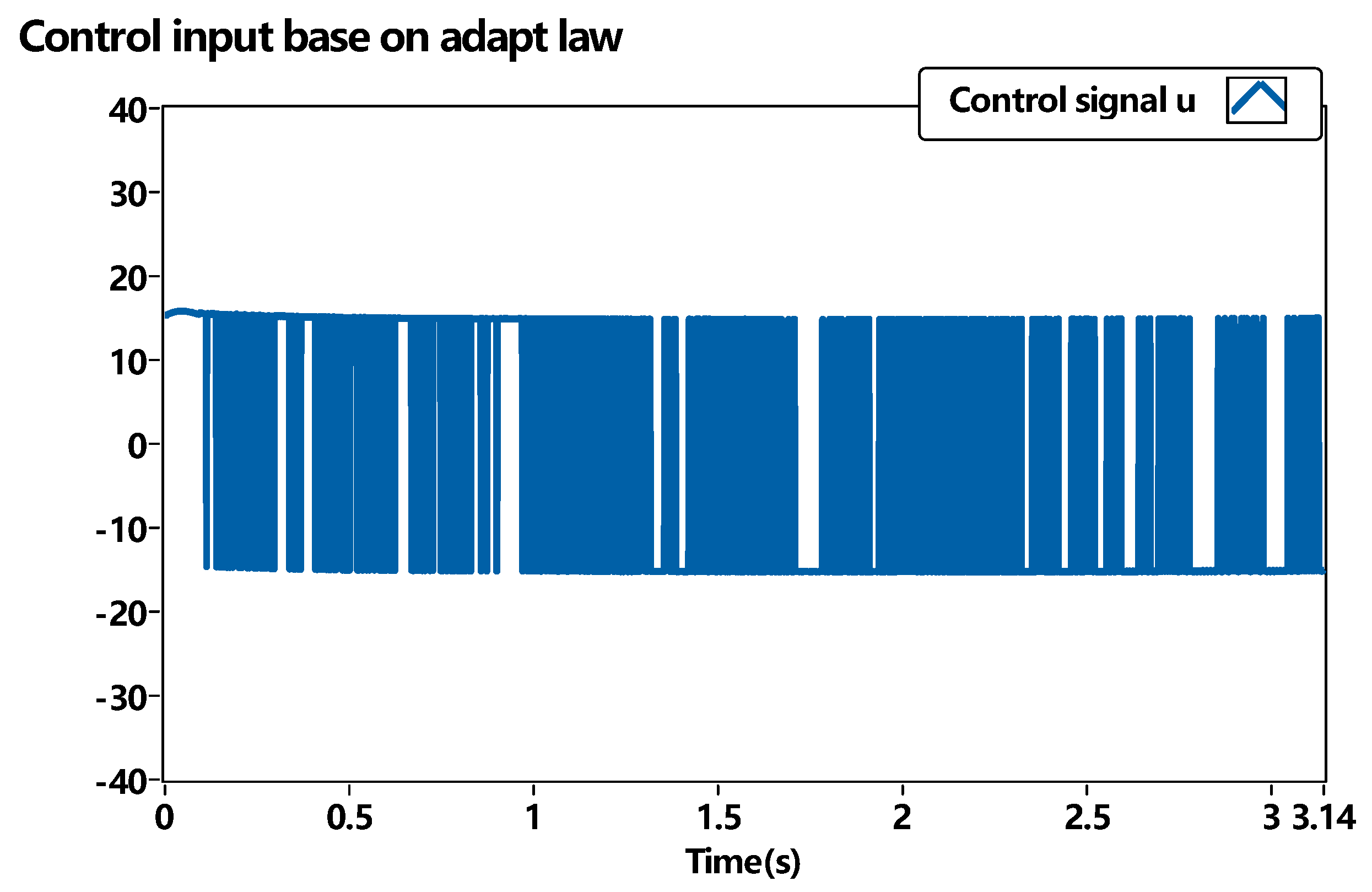
The control signal
of the real DC motor parameters with saturation is shown in
Figure 18. Compared with the control signal in
Figure 15, the adaptive sliding mode controller is robust enough to track the position and speed with less oscillation and small amplification control signal input, where the reaching parameter
,
,
, and sliding parameter
. The plant model parameters are shown in
Table 1.
In this section, a simple sliding mode with a general target is simulated in the first section. It presents an unsatisfied position and speed-tracking performance. Then, an adaptive robust sliding mode controller is proposed in the second subsection; it shows a better position and speed tracking performance. For the mechatronics engineering students, the bond graph of the whole system is presented in the third subsection; the bond graph demonstrates the synergy of the mechatronics system from a combination of multiple domains using the same graphical language.
The mathematical method (ODE) could help students build knowledge from the background perspective. And the bond graph method could help the researchers solve the problems from a novel graphical standpoint.
5. Test Results of the Modeling and Simulation Course
The final test from the ‘Modeling and Simulation’ course is evidence that using the bond graph method is easier than using the traditional mathematical technique to solve the mechatronics system.
Each year, the sample test is divided into three problems, with students solving each question using both the traditional mathematical approach and the bond graph method. And each answer would have two different outcomes. A claim is that the high-score strategy is the most convenient option for students to study for these three-year sample examinations.
A total of 21 students were in the ‘Modeling and Simulation’ class in the first year; the test results were collected to compare the ODE method and the bond graph method. The questions were graded between 1 (fail) and 5 (excellent). The average and the mean of each question are shown in
Table 3. According to the numerical connection, the average of the bond graph from questions one to three has increased by 16%, 26%, and 6%, respectively, when compared to the control group ODE average.
A total of 38 students attended the second-year test; the result is illustrated in
Table 4. When compared to the control group ODE average, the average of the bond graph from questions one to three has grown by 22%, 16%, and 20%, respectively, according to the numerical connection.
In the third year, 37 students finished the exam shown the results in
Table 5. According to the numerical connection, the average of the bond graph from questions one to three has increased by 25%, 39%, and 33%, respectively, as compared to the control group ODE average.
When comparing three years vertically, the sample of students has grown, and the disparity between the bond graph and the ODE has grown steadily each year. On the other hand, the bond graph has an advantage in the teaching of mechatronics. It also demonstrates that, for students, this is a more appropriate technique for studying mechatronics.
A
t–test is performed to help determine whether there is a significant difference between the bond graph solution and the ODE solution. The null hypothesis is that the bond graph and the ODE have the same level of acceptance by students, which is reflected by the same students using different methods for the same problems.
where
is the mean of the bond graph sample,
is the standard deviation of the bond graph, and
is the sample size of the bond graph.
is the mean of the ODE sample,
is the standard deviation of the ODE, and
is the sample size of the ODE.
The
t–test results are shown in
Table 6:
In general, the significance level is chosen to be 0.05, and the
value in
Table 6 above shows that the bond graph solution and the ODE solution have a significant difference. It proves the bond graph method is more acceptable for mechatronics undergraduate students.
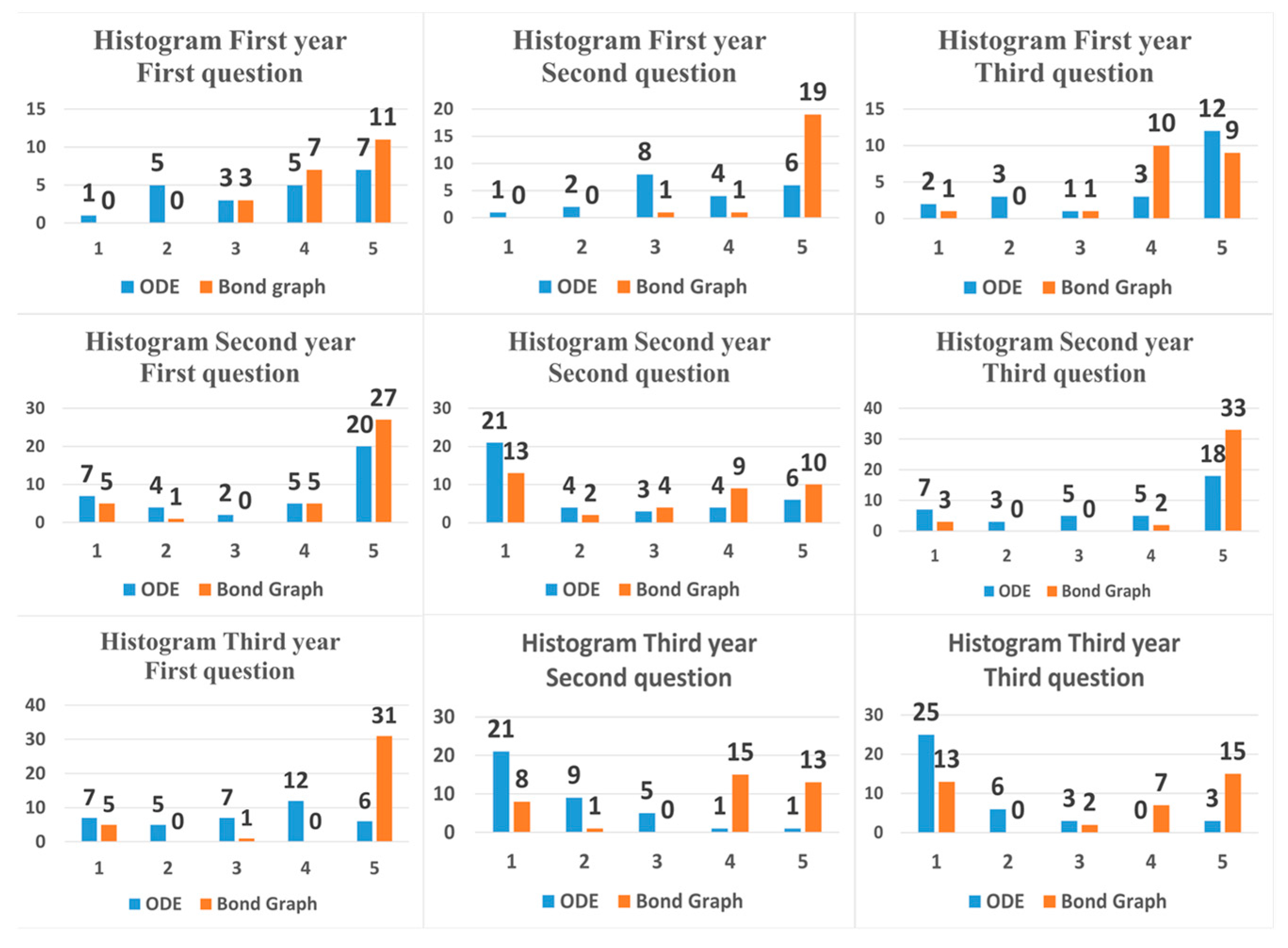
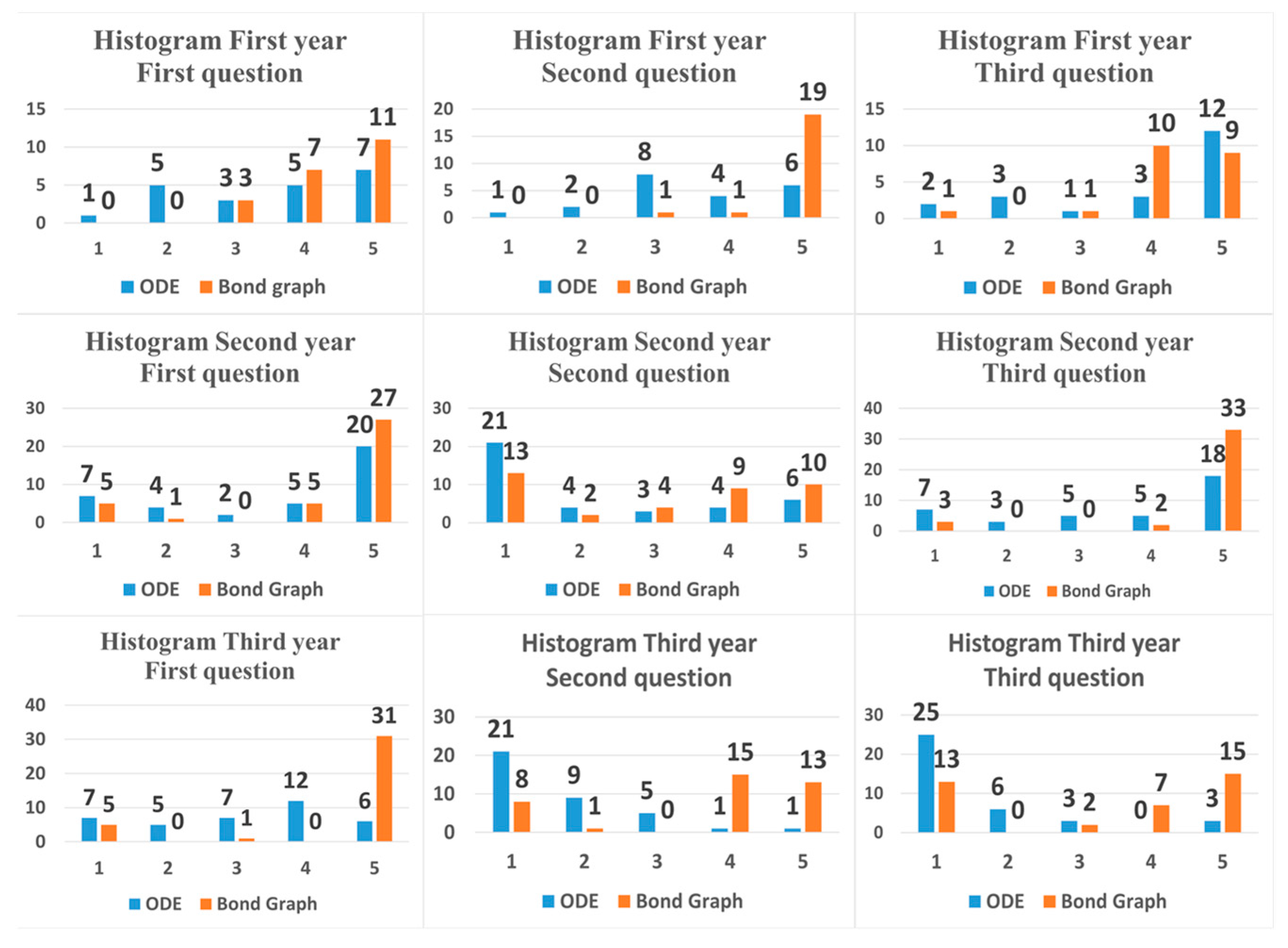
The three-year comparison histogram in
Figure 19 shows that the students received a higher score when they used the bond graph to solve the problems compared with the ODE. Compared with the ODE, the bond graph is a more acceptable method for students to solve questions in mechatronics engineering. It is straightforward to conclude that the bond graph method is simpler than the traditional mathematical method in the ‘Modeling and Simulation’ subject. It does not mean that the bond graph will replace the ODE method in daily teaching, but the bond graph provides a new graphical perspective of the whole system. It makes the bond graph a practical tool for learning “modeling and simulation” subjects in mechatronics engineering and a smart tool for teachers to use.
6. Conclusions
There are three related subjects in the undergraduate student curriculum, “Basics of Mechatronics” (first semester), “Modelling and Simulation” (fifth semester), and “Control Theory”(sixth semester) in the Mechatronics Engineering Department, University of Debrecen. In this paper, the bond graph is presented as a novel and reliable tool in the “modeling and simulation” subject to connect these three related subjects. The subject synergy is connected by the bond graph method; it provides an efficient process to derive the simulation block diagram compared with the traditional mathematical method. On the one hand, the traditional method (ODE) helps students build the mathematical background; in the meantime, a blueprint of the whole system is presented graphically by using the bond graph method. On the other hand, multiple fields are represented using the same graphical language. It is also the objective and goal of scientific research to encompass a variety of research objects under the same theory. It is referred to as the synergy of mechatronics engineering. Another main contribution of the paper is the representation of the PID and sliding mode controller using the bond graph.
The example materials present that the bond graph method could provide a better view of the whole system from a graphical language, and it is a handy tool to solve the modeling questions for mechatronics students. The paper aims to provide mechatronics students with a step-by-step introduction to the state of the art in the field of the ‘modeling and simulation’ subject. Some dispersed problem assignments in Section Three and Section Four could properly guide students while also expanding their expertise. This novel teaching style may aid students in learning how to construct a simulation based on a real-world question.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}