
Signal Processing of Acoustic Data for Condition Monitoring of an Aircraft Ignition System


Abstract
1. Introduction
1.1. Boeing 737-400 APU
1.2. Literature Review
1.3. Scope of Research
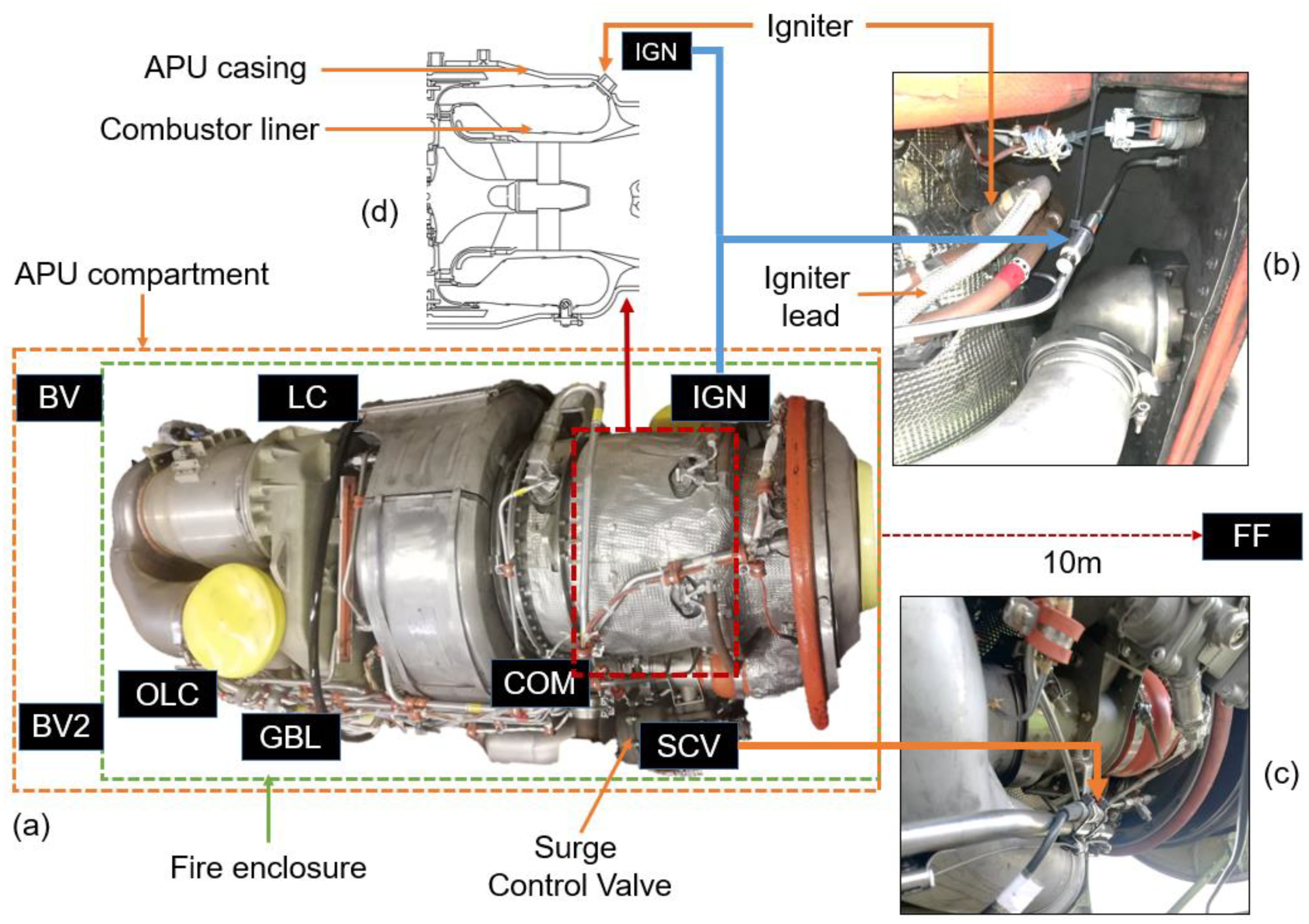
2. Experimental Data Collection
Initial Analysis and Data Preparation
3. Employed Methodology
4. Results and Discussion
4.1. Implementation of High-Pass Filter
4.2. SRF Estimation
4.3. Spark Event Segmentation
| Background noise | |
| Spark signal |
4.4. Performance Metric for Feature Evaluation
- Mean value of the coefficient of overlap between the distribution of feature values computed at the two sensor locations:
- 2.
- Mean value of the coefficient of overlap between the distribution of feature values computed at a sensor location, and for the corresponding background noise:
4.5. Selected Features for Evaluation
- Peak value after application of moving average filter on the high-pass filtered signal ():
- :where is the high-pass filtered signal around each spark signal, and is the number of samples within the time duration.
- Difference between of spark signal and background noise ():
- Mean ()
- Shape factor ()
- The average number of connected nodes found using a visibility graph (). The horizontal visibility graph was chosen for evaluation, in which two nodes ( and ) are said to be connected only if a horizontal line can be drawn between them that does not intersect any of the intermediate data points [35]:
- Spectral arithmetic mean (
- Spectral geometric mean [
- Spectral flatness (
- Spectral crest (where is the spectral value at bin k, and b1 and b2 are the band edges, in bins, over which to calculate the spectral spread.
4.6. Feature Extraction Results
5. Conclusions
- Signal processing of the raw acoustic data acquired from a well-placed microphone (preferably close to the igniter) can produce condition indicators that are representative of the health of an ignition system.
- A high-pass filter with kHz is suitable to suppress the background noise, while retaining the spark acoustic characteristics up to 20% RPM of the APU.
- Envelope spectrum technique can compute the spark repetition frequency (and the degree of its fluctuations), which can be compared against nominal limits in order to detect inconsistencies in the ignition exciter electrical characteristics (such as input voltage).
- The onset time () can be reliably estimated by detecting the slope of the signal, once a moving average filter has been applied.
- Samples taken between and of each spark pulse are appropriate for computing features that can be used as indicators of the ignition system’s health.
- The results show that there are certain features that are robust against time-varying background noise, and are insensitive to a change in sensor location; thus, these features can be employed as condition indicators. For example, the features and have been found to show a particular trend that is associated with igniter wear taking place over a period of five months.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Skliros, C.; Ali, F.; Jennions, I.K.; Fakhre, A. Experimental Investigation and Simulation of a Boeing 747 Auxiliary Power Unit. J. Eng. Gas Turbines Power 2020, 142, 081005. [Google Scholar] [CrossRef]
- Ahmed, U.; Ali, F.; Jennions, I. A review of aircraft auxiliary power unit faults, diagnostics and acoustic measurements. Prog. Aerosp. Sci. 2021, 124, 100721. [Google Scholar] [CrossRef]
- Zhang, Y.; Hanachi, H.; Liu, J.; Yang, C. Model-based degradation inference for auxiliary power unit start system. Eng. Fail. Anal. 2020, 118, 104895. [Google Scholar] [CrossRef]
- Kim, K.; Uluyol, O.; Parthasarathy, G.; Mylaraswamy, D. Fault diagnosis of gas turbine engine LRUs using the startup characteristics. Proc. Annu. Conf. Progn. Health Manag. Soc. 2012, 2012, 93–102. [Google Scholar]
- Jennions, I.K. Integrated Vehicle Health Management-Business Case Theory and Practice; SAE International: Warrendale, PA, USA, 2012. [Google Scholar]
- Esperon-Miguez, M.; John, P.; Jennions, I. A review of Integrated Vehicle Health Management tools for legacy platforms: Challenges and opportunities. Prog. Aerosp. Sci. 2012, 56, 19–34. [Google Scholar] [CrossRef]
- Ayrault, C.; Béquin, P.; Baudin, S.; Ayrault, C.; Béquin, P.; Baudin, S. Characteristics of a spark discharge as an adjustable acoustic source for scale model measurements. Proc. Acoust. 2012, 2012, 5. Available online: https://hal.archives-ouvertes.fr/hal-00810828/document (accessed on 17 August 2022).
- Zel’Dovich, Y.; Raizer, Y. Physics of Shock Waves and High-Temperature Hydrodynamic Phenomena; Academic Press: Cambridge, MA, USA, 1967. [Google Scholar] [CrossRef]
- Ahmed, U.; Ali, F.; Jennions, I.K. Development of a Far-Field Noise Estimation Model for an Aircraft Auxiliary Power Unit. IEEE Access 2021, 9, 127703–127719. [Google Scholar] [CrossRef]
- Boeing. 737-300/400/500: Aircraft Maintenance Manual; Boeing: Seattle, DC, USA, 2015. [Google Scholar]
- Frus, J.R. Diagnostic Device for Gas Turbine Ignition System. US Patent 5,155,437, 13 October 1992. [Google Scholar]
- Gary, R. Hoeflich, Ignition Performance Monitor and Monitoring Method for Capacitive Discharge Ignition Systems. US Patent 5,208,540, 4 May 1993. [Google Scholar]
- Youssef, M. Health Monitoring of Igniters. US Patent 2015/0036781 A1, 5 February 2015. [Google Scholar]
- Ponziani, R.L. Method and Apparatus for Gas Turbine Engines. US Patent 2006/0241886 A1, 26 October 2006. [Google Scholar]
- Pond, C.; Lucier, D. Caring for Spark Plugs. Turbomach. Int. 2006, 47, 36–37. [Google Scholar]
- Staszewski, W.; Tomlinson, G. Local Tooth Fault Detection In Gearboxes Using A Moving Window Procedure. Mech. Syst. Signal Process. 1997, 11, 331–350. [Google Scholar] [CrossRef]
- Bastami, A.R.; Bashari, A. Rolling element bearing diagnosis using spectral kurtosis based on optimized impulse response wavelet. J. Vib. Control 2020, 26, 175–185. [Google Scholar] [CrossRef]
- Liang, L.; Shan, L.; Liu, F.; Li, M.; Niu, B.; Xu, G. Impulse Feature Extraction of Bearing Faults Based on Convolutive Nonnegative Matrix Factorization. IEEE Access 2020, 8, 88617–88632. [Google Scholar] [CrossRef]
- Yang, W.-X.; Ren, X.-M. Detecting Impulses in Mechanical Signals by Wavelets. EURASIP J. Adv. Signal Process. 2004, 2004, 946162. [Google Scholar] [CrossRef]
- Liu, Y.; Chai, Y.; Liu, B.; Wang, Y. Impulse Signal Detection for Bearing Fault Diagnosis via Residual-Variational Mode Decomposition. Appl. Sci. 2021, 11, 3053. [Google Scholar] [CrossRef]
- Zhuang, Z.; Ding, J.; Tan, A.C.; Shi, Y.; Lin, J. Fault Detection of High-Speed Train Wheelset Bearing Based on Impulse-Envelope Manifold. Shock Vib. 2017, 2017, 2104720. [Google Scholar] [CrossRef]
- Wang, Y.; Chi, Y.; Wu, X.; Liu, C. Extracting acoustical impulse signal of faulty bearing using blind deconvolution method. In Proceedings of the 2009 Second International Conference on Intelligent Computation Technology and Automation, Changsha, China, 10–11 October 2009; Volume 1, pp. 590–594. [Google Scholar] [CrossRef]
- Arslan, Y. A new approach to real time impulsive sound detection for surveillance applications. arXiv 2019, arXiv:1906.06586. [Google Scholar]
- Dos Reis, C.F.; Altafim, R.A.P.; Gutnik, Y.; Altafim, R.A.C.; Cavalcanti, C.A. Comparative analysis between impulsive detection methods applied on partial discharge acoustic signals. In Proceedings of the 2014 IEEE International Instrumentation and Measurement Technology Conference (I2MTC) Proceedings, Montevideo, Uruguay, 12–15 May 2014; pp. 418–421. [Google Scholar] [CrossRef]
- Peck, C.H.; Moore, P. A direction-finding technique for wide-band impulsive noise source. IEEE Trans. Electromagn. Compat. 2001, 43, 149–154. [Google Scholar] [CrossRef]
- Tilz, A.; Meyer, G.; Kiesling, C.; Pirker, G.; Salbrechter, S.; Wimmer, A. Design of a test rig for fundamental investigations of spark characteristics. Int. J. Engine Res. 2020, 21, 1412–1425. [Google Scholar] [CrossRef]
- Edward, R. A Study of Acoustic Radiation from an Electrical Spark Discharge in Air. Master’s Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 1974. [Google Scholar]
- Shibayama, H.; Fukunaga, K.; Kido, K. Directional characteristics of pulse sound source with spark discharge. J. Acoust. Soc. Jpn. 1985, 6, 73–77. [Google Scholar] [CrossRef]
- Wang, J.; Cao, J.; Cai, L.; Fan, Y.; Zhou, M.; Li, Q. Characteristics of acoustic response from simulated impulsive lightning current discharge. High Volt. 2019, 4, 221–227. [Google Scholar] [CrossRef]
- Liu, J.; Bi, M.; Jiang, H.; Gao, W. Evaluation of spark discharge. J. Electrost. 2020, 107, 103500. [Google Scholar] [CrossRef]
- Wyber, R. The design of a spark discharge acoustic impulse generator. IEEE Trans. Acoust. Speech Signal Process. 1975, 23, 157–162. [Google Scholar] [CrossRef]
- Eidous, O.M.; Al-Talafha, S.A.-D.A. Kernel method for overlapping coefficients estimation. Commun. Stat.-Simul. Comput. 2020, 1–18. [Google Scholar] [CrossRef]
- Giannakopoulos, T.; Pikrakis, A. Introduction to Audio Analysis; Academic Press: Cambridge, MA, USA, 2014. [Google Scholar]
- Najim, K.; Ikonen, E.; Daoud, A.K. Kaddour Najim, Stochastic Processes: Estimation, Optimization and Analysis; Kogan Page: London, UK, 2004. [Google Scholar]
- Miguez, M.E.; Uriondo, A.; Rodriguez, J.; Luque, B. A Feasibility Study on the Implementation of Visibility Algorithms for Fault Diagnosis in Aircraft Fuel Systems. Int. J. Progn. Health Manag. 2019, 10, 1. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Feature Name | |||
|---|---|---|---|
| 0.83 | - | - | |
| 0.81 | 0.02 | 0.10 | |
| 0.80 | 0.10 | 0.19 | |
| 0.76 | 0.09 | 0.07 | |
| 0.72 | 0.02 | 0.05 | |
| 0.70 | 0.01 | 0.02 | |
| 0.65 | 0.07 | 0.13 | |
| 0.63 | 0.00 | 0.00 | |
| 0.62 | 0.00 | 0.00 | |
| 0.61 | 0.00 | 0.01 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ahmed, U.; Ali, F.; Jennions, I. Signal Processing of Acoustic Data for Condition Monitoring of an Aircraft Ignition System. Machines 2022, 10, 822. https://doi.org/10.3390/machines10090822
Ahmed U, Ali F, Jennions I. Signal Processing of Acoustic Data for Condition Monitoring of an Aircraft Ignition System. Machines. 2022; 10(9):822. https://doi.org/10.3390/machines10090822
Chicago/Turabian StyleAhmed, Umair, Fakhre Ali, and Ian Jennions. 2022. "Signal Processing of Acoustic Data for Condition Monitoring of an Aircraft Ignition System" Machines 10, no. 9: 822. https://doi.org/10.3390/machines10090822
APA StyleAhmed, U., Ali, F., & Jennions, I. (2022). Signal Processing of Acoustic Data for Condition Monitoring of an Aircraft Ignition System. Machines, 10(9), 822. https://doi.org/10.3390/machines10090822