
Design and Load Distribution Analysis of the Mismatched Cycloid-Pin Gear Pair in RV Speed Reducers




Abstract
:1. Introduction
2. Tooth Profile Geometry of Cycloid Gear
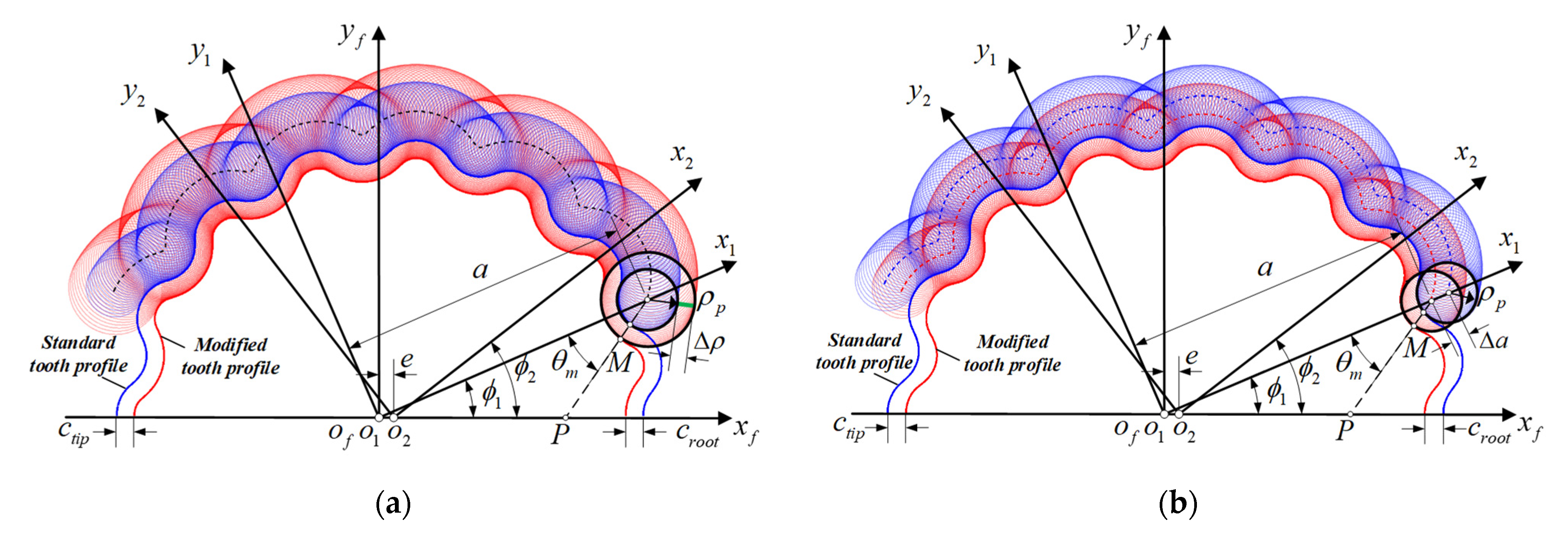
2.1. Tooth Profile Generation and Modification
2.2. Curvature Radius of the Cycloid Gear Tooth Profile
3. Improved Load Distribution Modelling
- The model is discussed in the two-dimensional plane because the teeth are straight and parallel to the shaft axis.
- The model is established under the quasi-static condition, neglecting the inertia forces.
- Friction can be neglected to avoid the uncertainness about the Coulomb frictional coefficient.
- The influence of damaging will be negligible to avoid the uncertainness of the damaging when the stresses are beyond the allowable value.
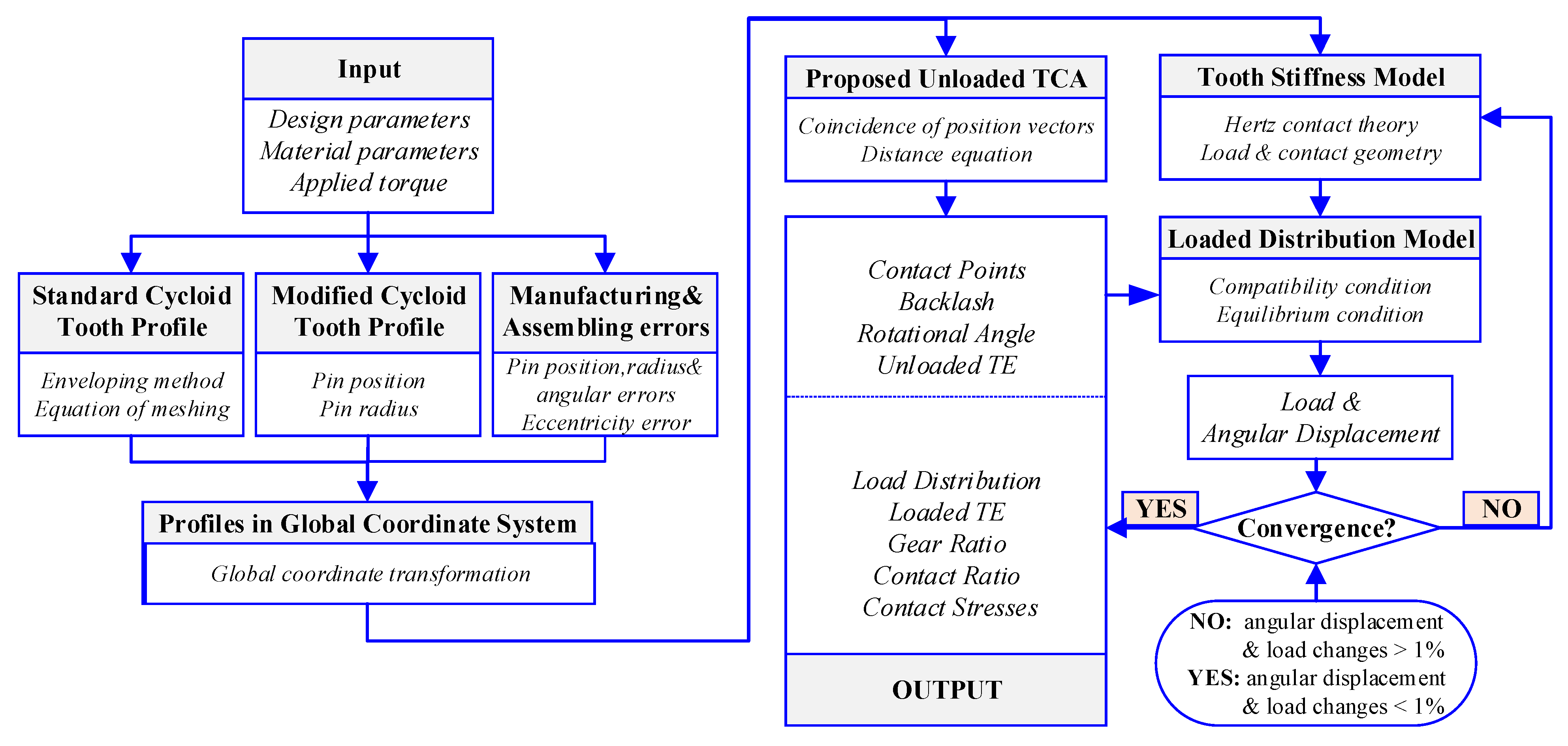
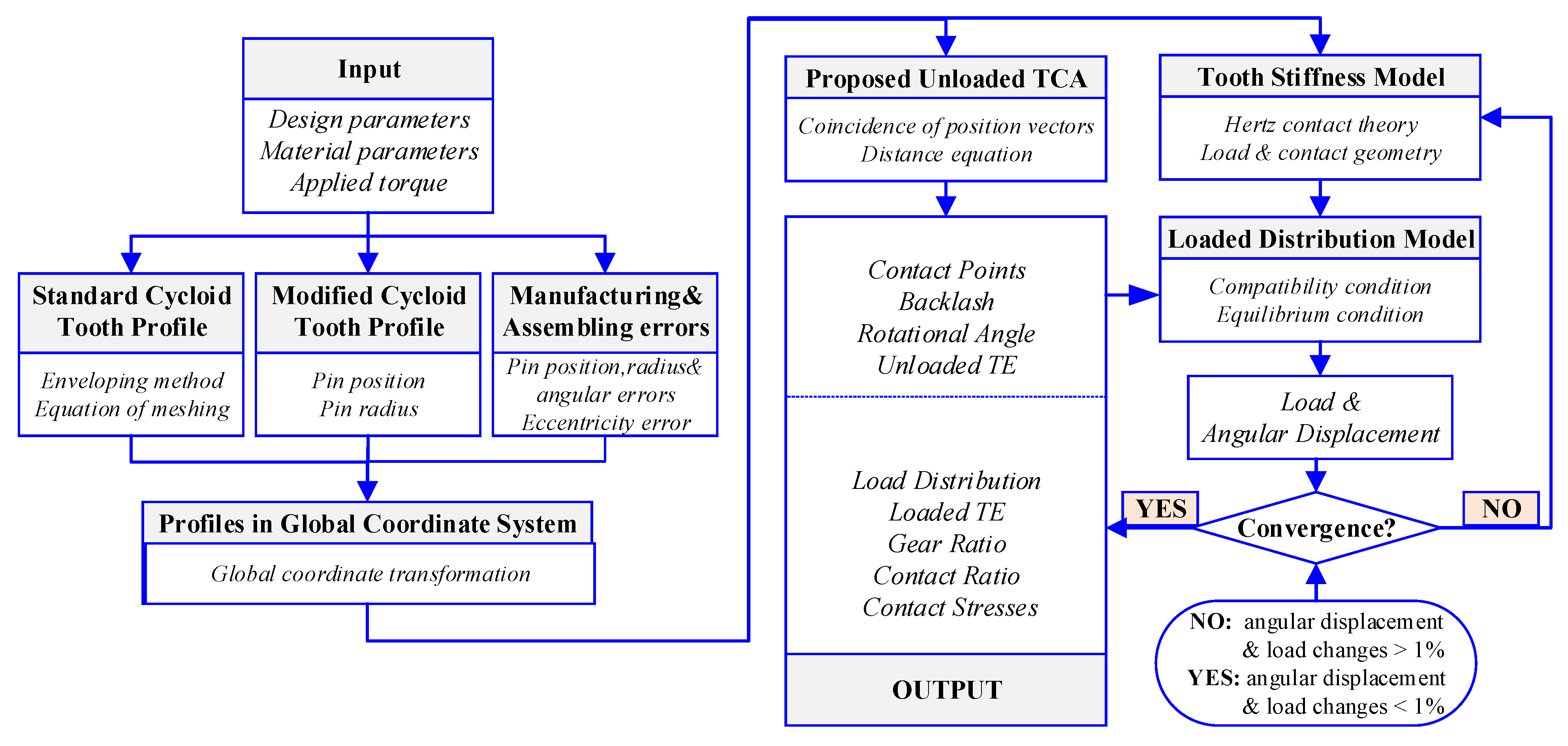
- Step 1
- Defining the modified tooth profile of the cycloid gear with the design parameters and the modifiaction ammounts.
- Step 2
- Applying the unloaded tooth contact analysis (TCA) to determine the meshing information when two contact conditions are satisfied by transferring the tooth and pin profiles into the fixed coordinate system.
- Step 3
- Determining the the initial guesses of angular parameters based on the geometrical and kinetic relationships; the values will be updated after every iteration. The system of nonlinear equations is then solved by the fsolve fuction provided in Matlab.
- Step 4
- Considering the meshing point as a linear spring with a contact stiffness along the line of action where the contact deformation of the pin-groove pair is introduced.
- Step 5
- The force and torque system equations are solved by the fsolve fuction provided in Matlab simultaneously by using an iterative technique after the initial load and angular displacement are given.
- Step 6
- After several iterations, load and angular displacement changes will converge within 1%, and then the iterative procedure will be terminated.
- Step 7
- Outputting the predicted rasults, including the distributed loads among pins, the contact stress, the transmission error, and the variation of the instantaneous gear ratio through a mesh cycle.
3.1. Unloaded Tooth Contact Analysis
3.2. Initial Guesses Determination
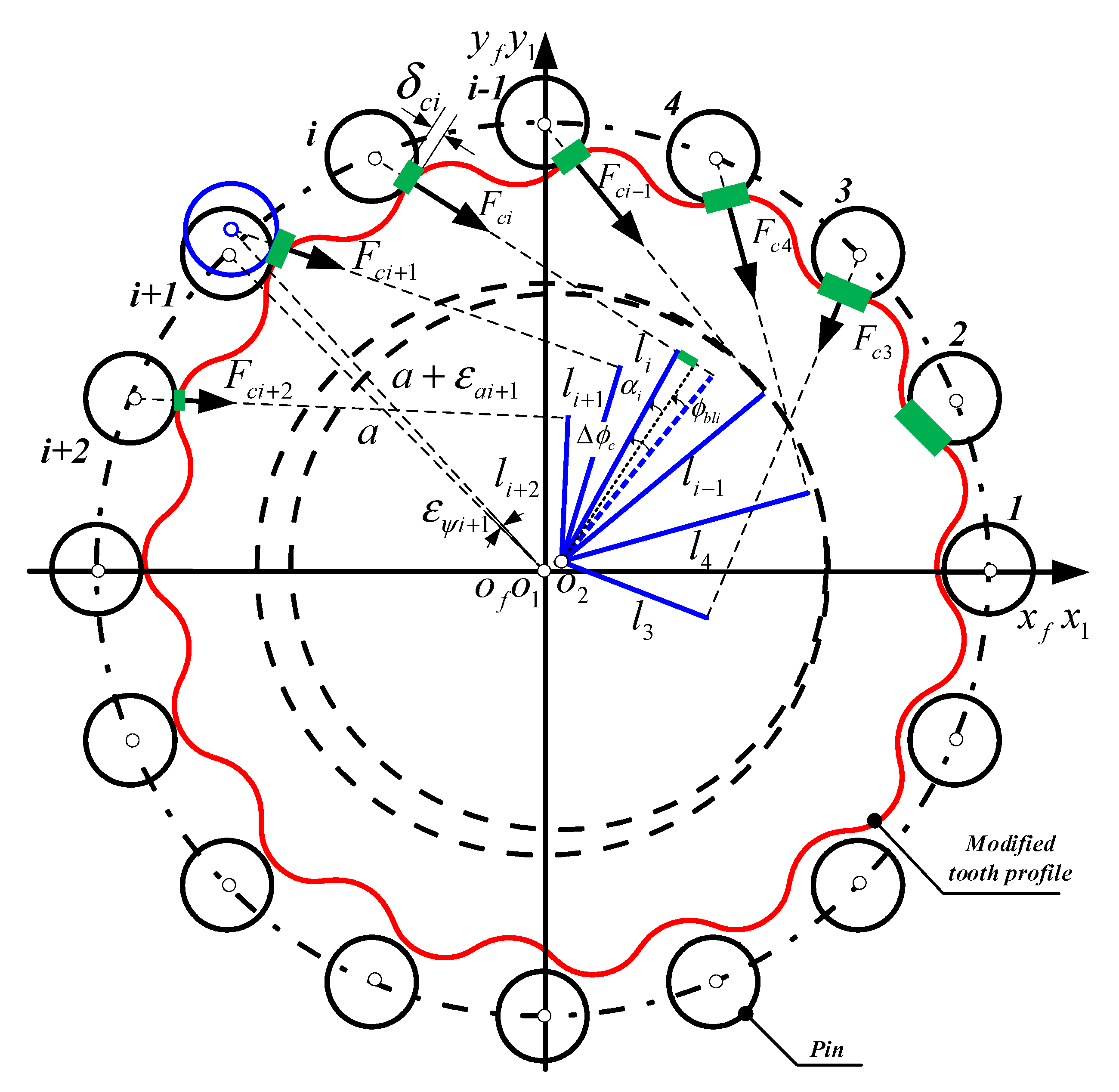
3.3. Compatibility and Equilibrium Conditions
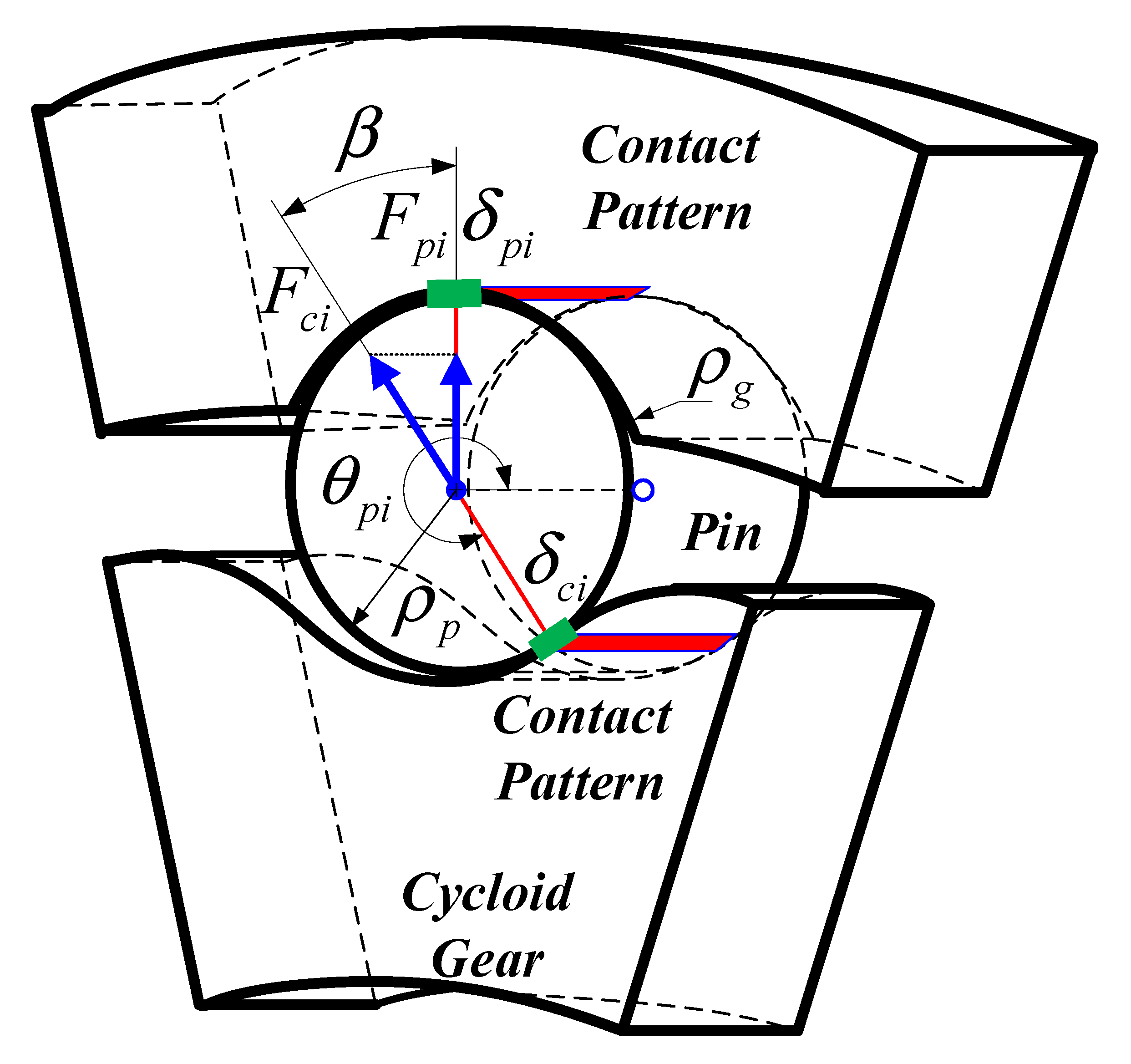
3.4. Hertzian Contact Stiffness
3.5. Contact Stress, Loaded TE, and Gear Ratio
4. Analysis Results and Discussion
4.1. Comparison and Verification
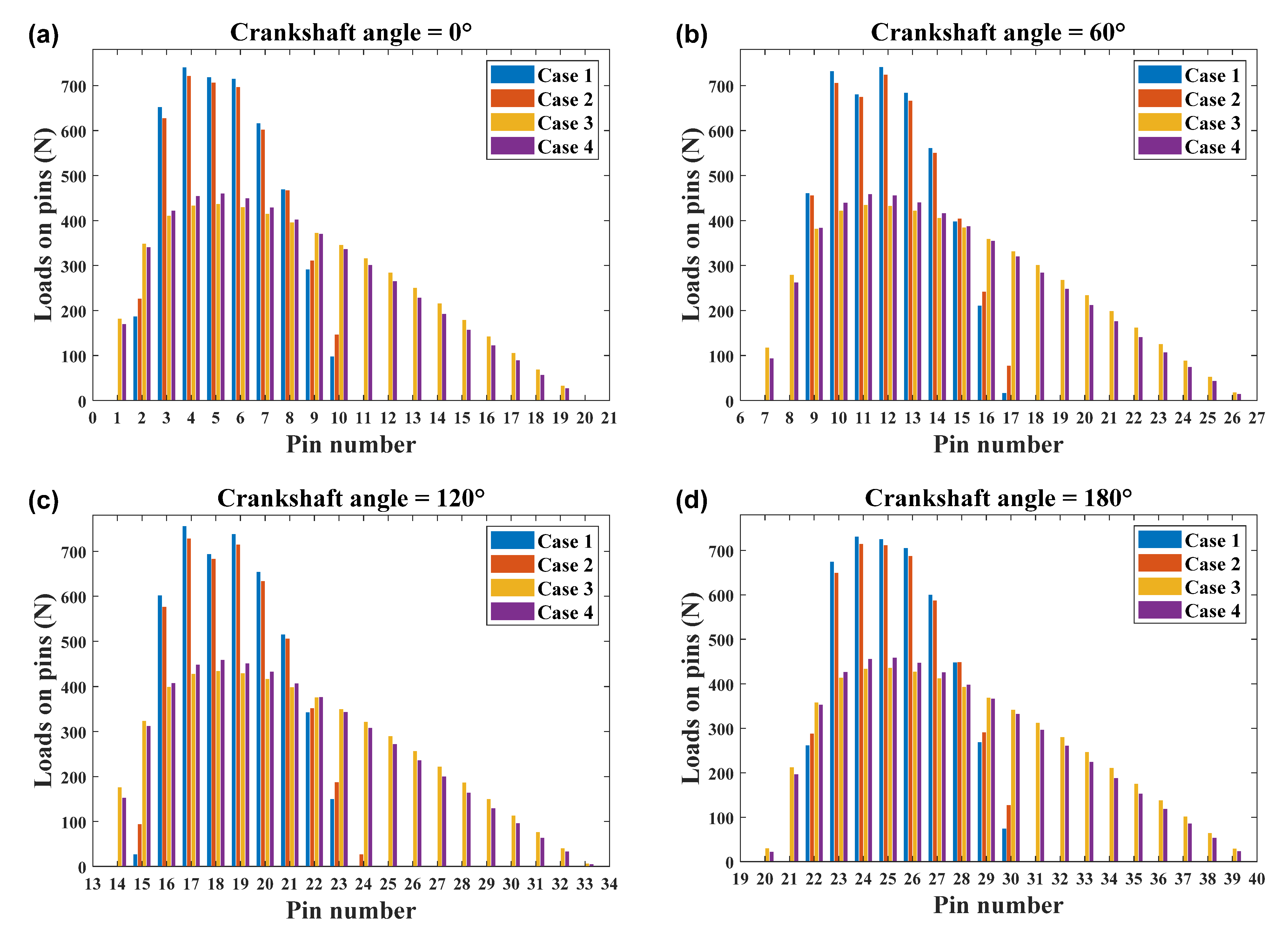
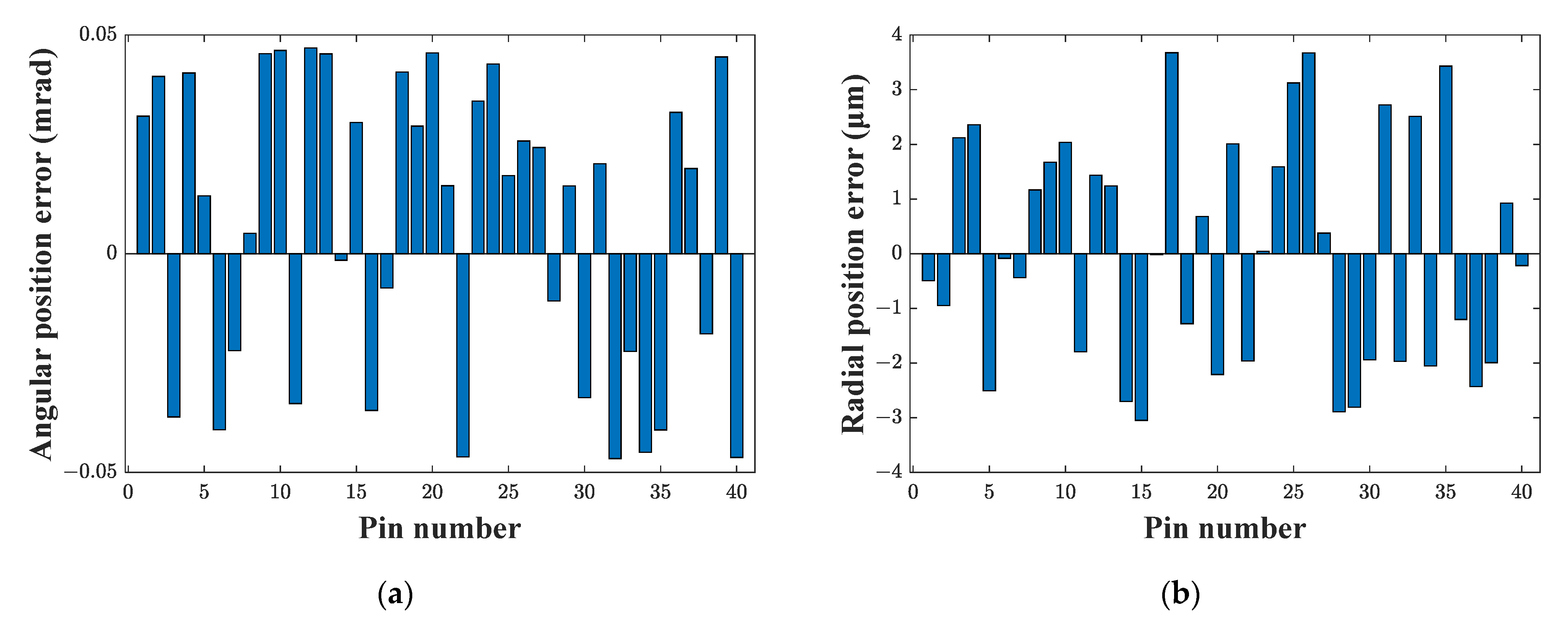
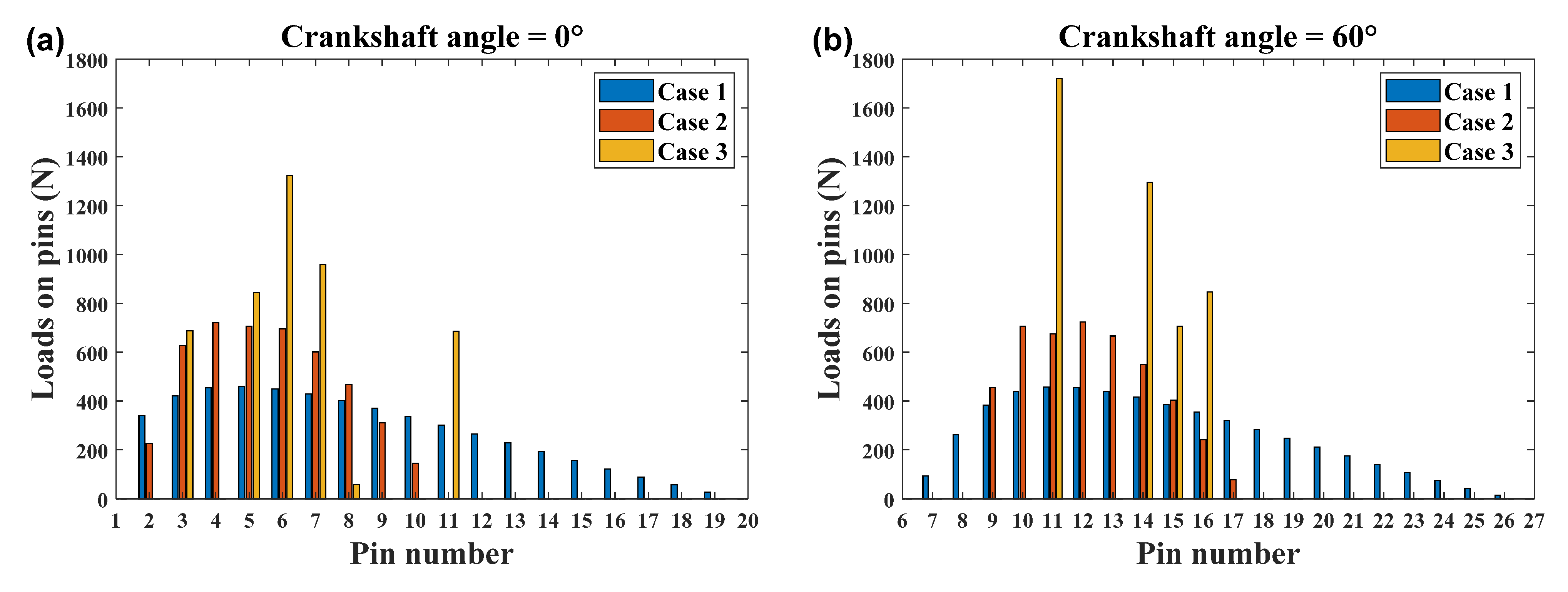
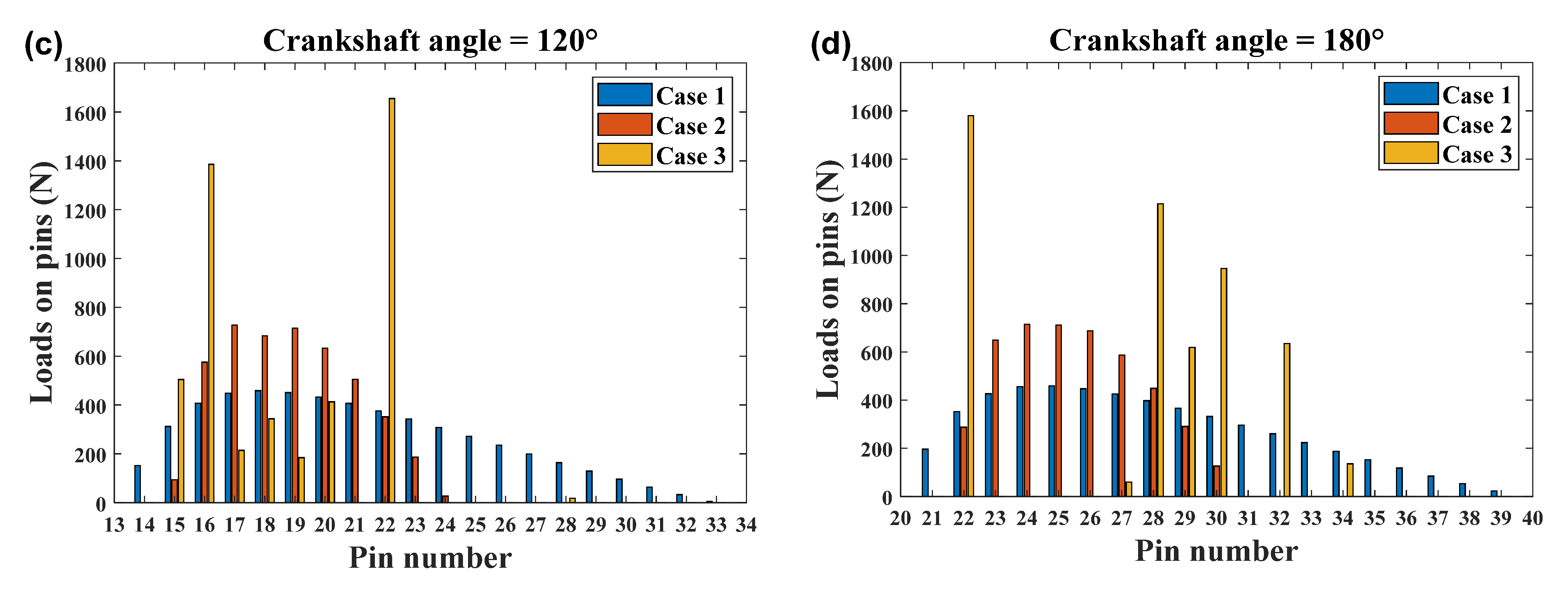
4.2. Effect of the Position Deviations of Ring Pins
5. Conclusions
- 1.
- In order to improve the precision of the prediction model, the contact deformation of the pin-groove pairs under the cycloid drive design stage should be considered indispensably, which is verified by the comparison with those obtained by the current model. It has some effects on the maximum contact stress and the mean and peak-to-peak values of the loaded TE.
- 2.
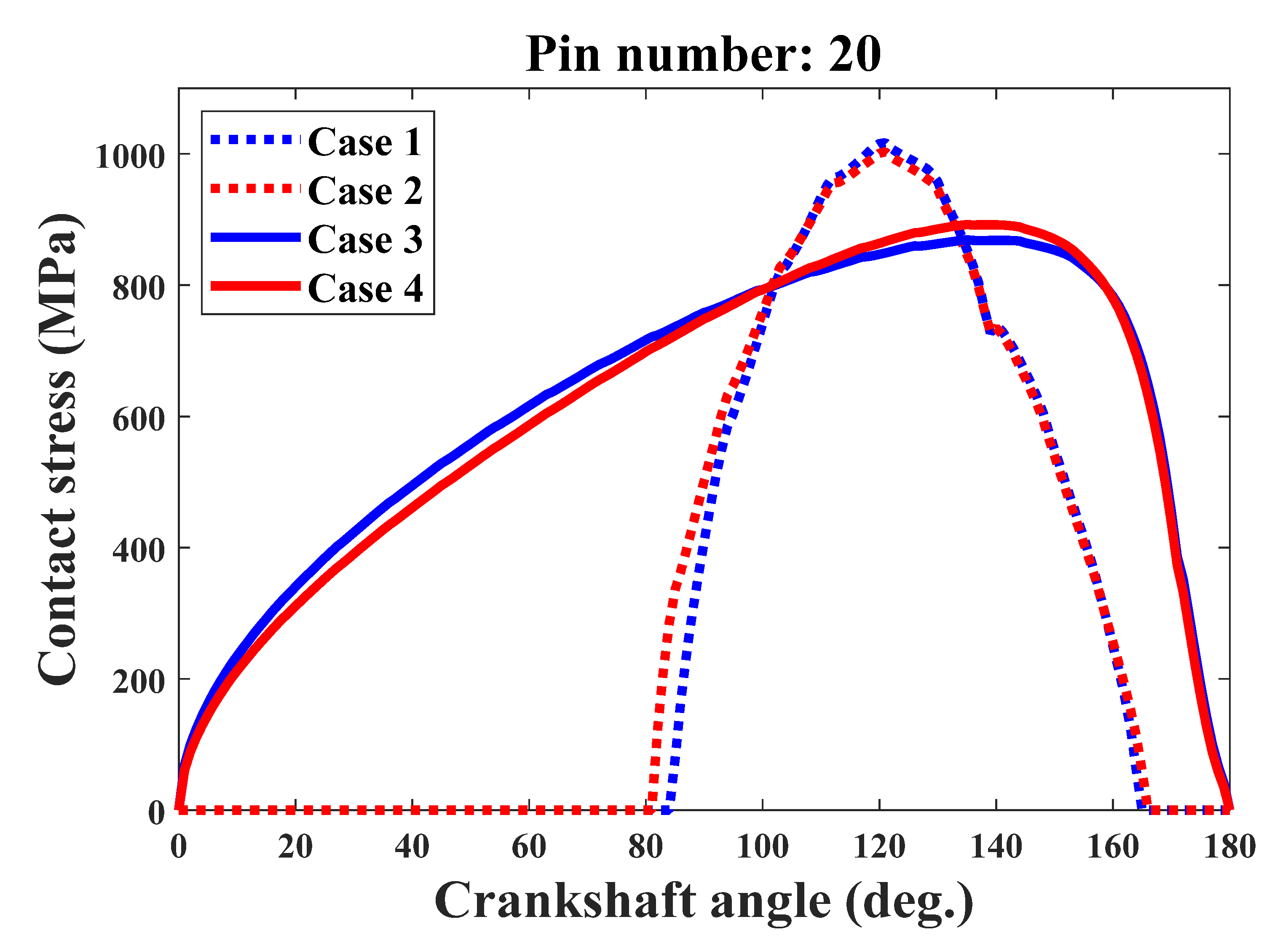
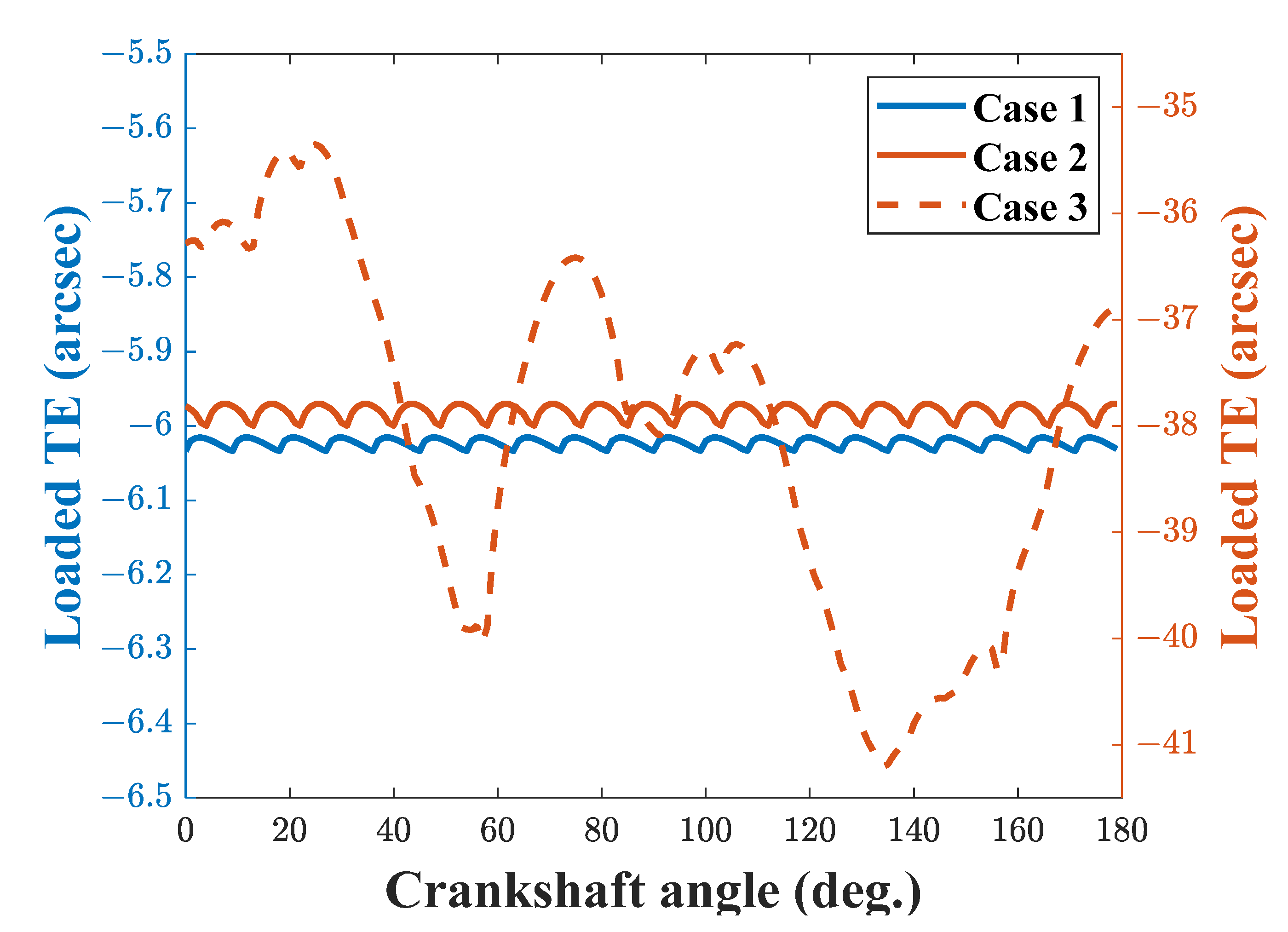
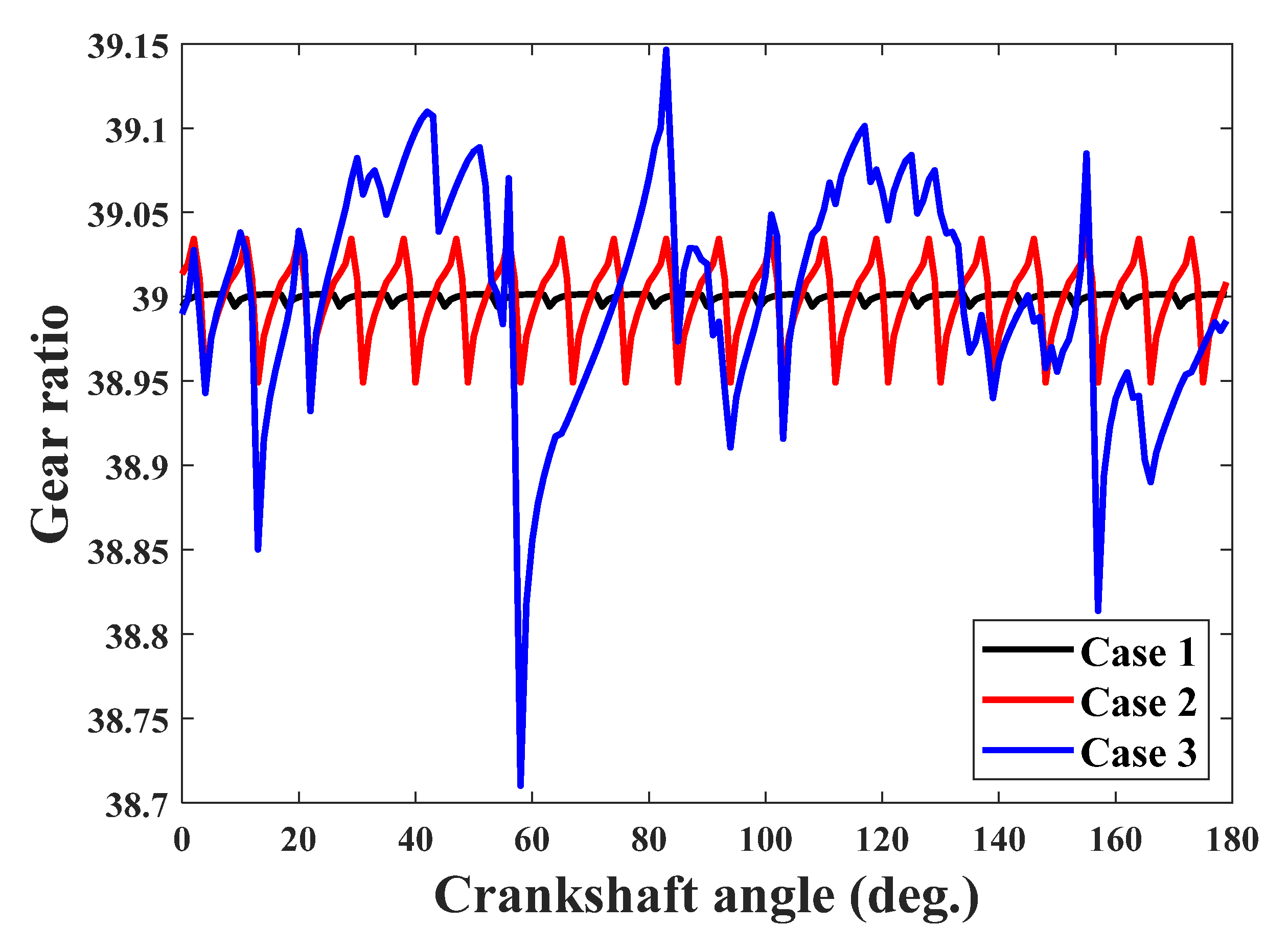
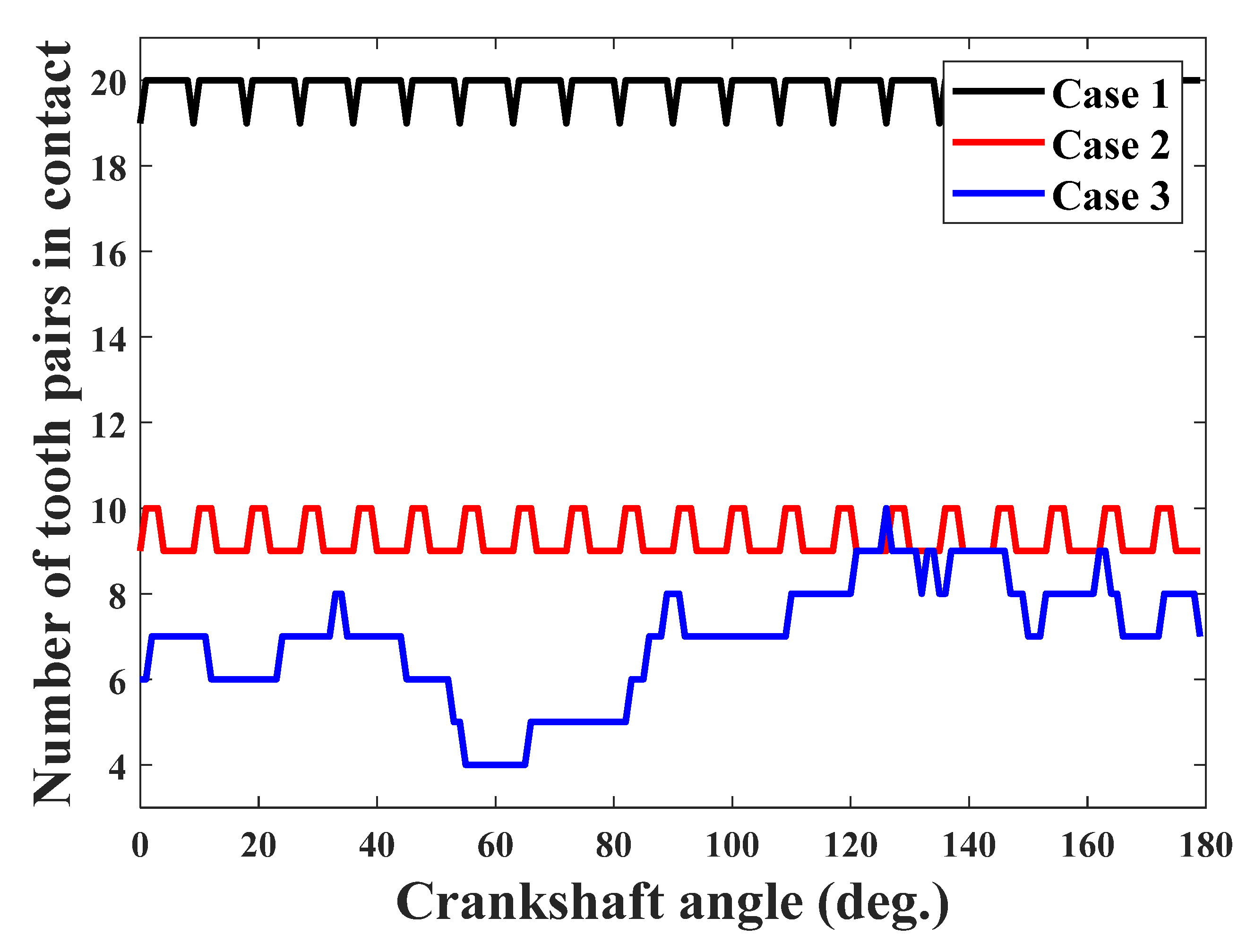
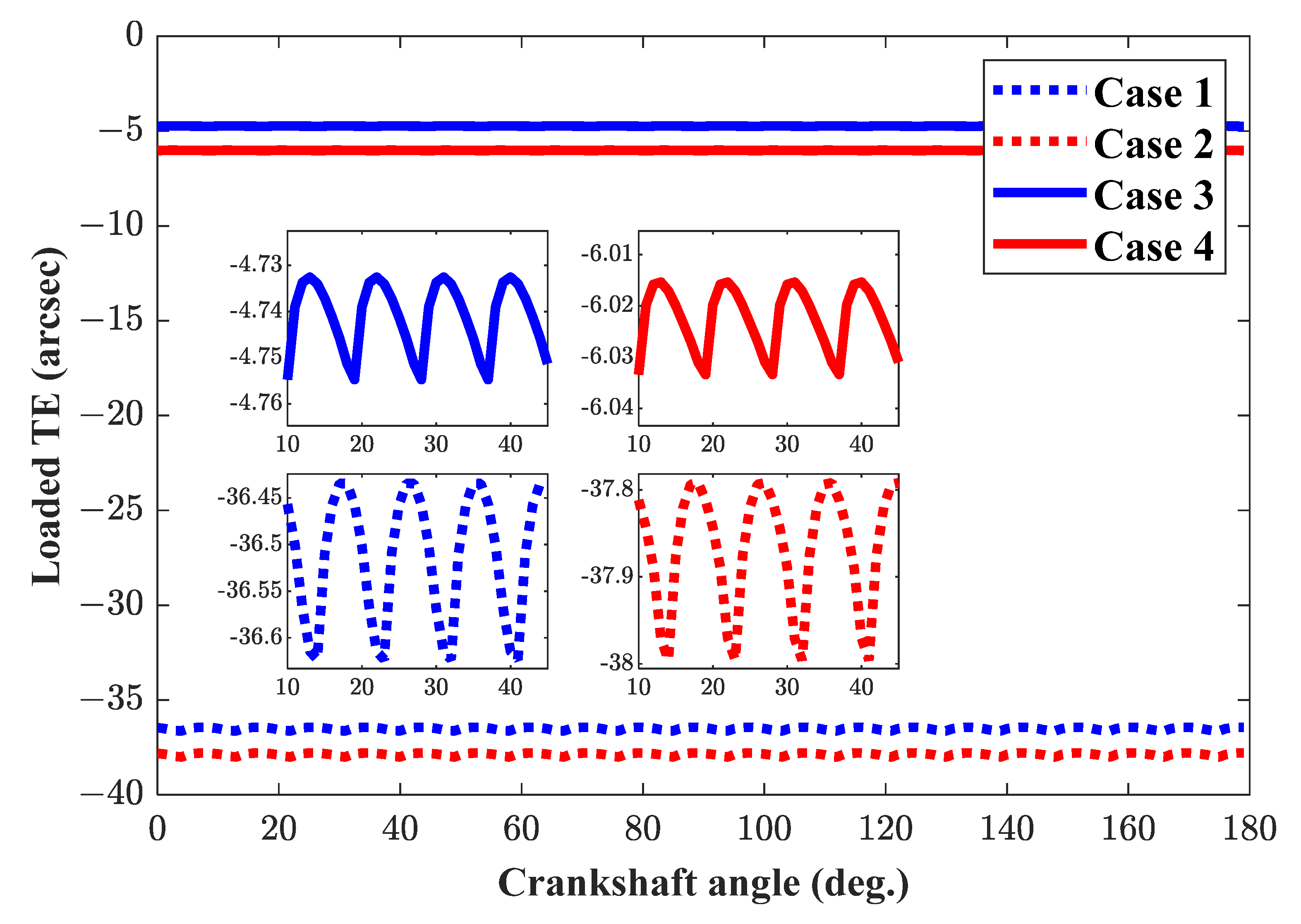
- The obtained results show the necessity of the consideration of the tooth profile modification in the design and analysis of the cycloid-pin gear pair. It was observed to significantly influence the distributed load, contact stress, loaded TE, and real gear ratio of the cycloid drive. The number of contacting pins decreases from 20 to 9. The stress increases to 149 MPa. The absolute mean values of the loaded TE increase by about 30 arc seconds when the tooth profile modification is present.
- 3.
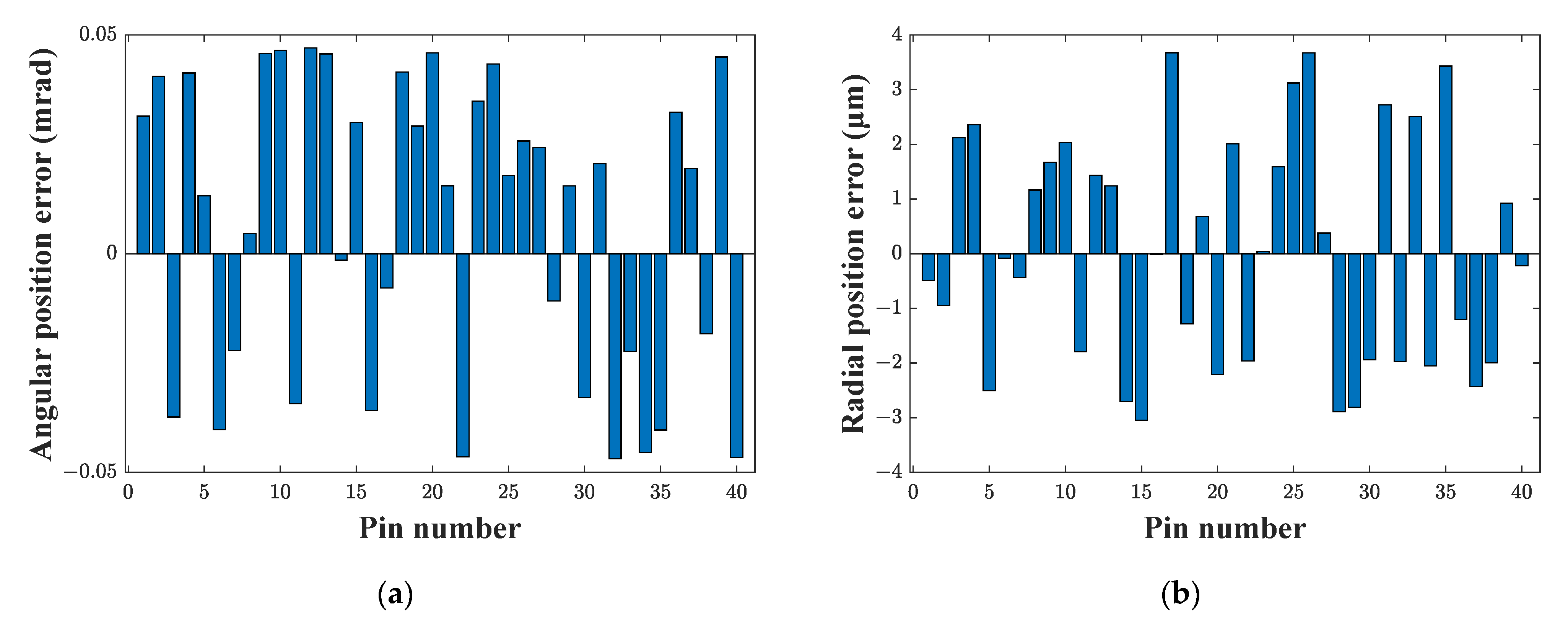
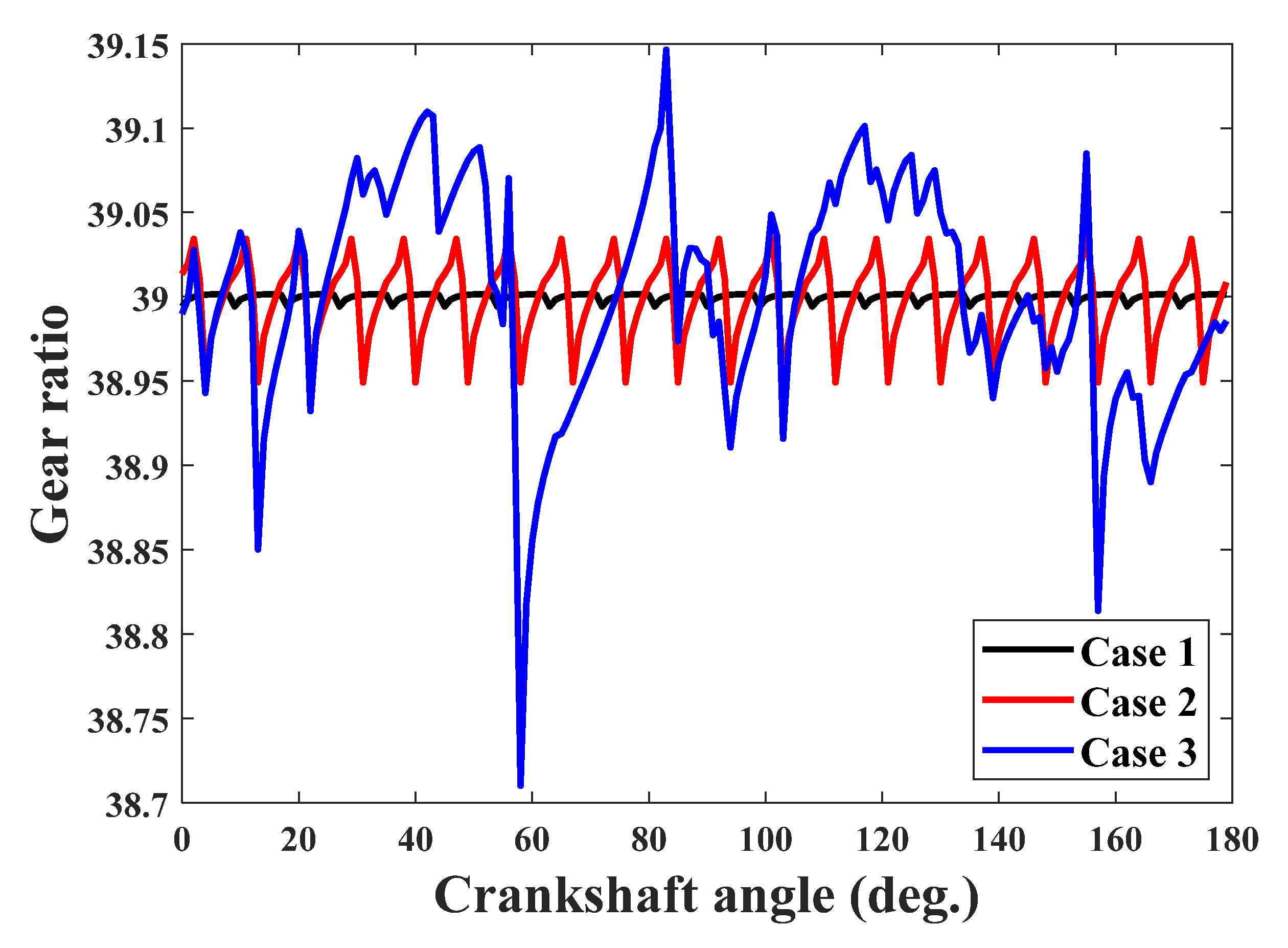
- Even minute random angular and radial position errors of the ring pins with the ranges of ±0.05 mrad and ±4 μm of the pinion have considerable effects on the tooth contact parameters. Large discrepancies are observed, the maximum contact stress reaches 1887 MPa beyond the strength limit, the peak-to-peak values of the loaded TE increase from 0.21 arc seconds to 5.38 arc seconds, and the peak-to-peak value of the gear ratio increases to 44 % of the ideal gear ratio. The irregular change of meshing clearances caused by the combined position error has a very strong influence on the tooth contact, which will worsen the contact strength, transmission accuracy, and torque ripple of the RV speed reducer.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Sensinger, J.W. Unified approach to cycloid drive profile, stress, and efficiency optimization. J. Mech. Des. 2010, 132, 024503. [Google Scholar] [CrossRef]
- Wang, H.; Shi, Z.Y.; Yu, B.; Xu, H. Transmission performance analysis of RV reducers influenced by profile modification and load. Appl. Sci. 2019, 9, 4099. [Google Scholar] [CrossRef] [Green Version]
- Zhang, T.; Li, X.; Wang, Y.; Sun, L. A semi-analytical load distribution model for cycloid drives with tooth profile and longitudinal modifications. Appl. Sci. 2020, 10, 4859. [Google Scholar] [CrossRef]
- Liu, C.; Shi, W.; Xu, L.; Liu, K. A novel approach to calculating the transmission accuracy of a cycloid-pin gear pair based on error tooth surfaces. Appl. Sci. 2021, 11, 8671. [Google Scholar] [CrossRef]
- Lin, W.S.; Shih, Y.P.; Lee, J.J. Design of a two-stage cycloidal gear reducer with tooth modifications. Mech. Mach. Theory 2014, 79, 184–197. [Google Scholar] [CrossRef]
- Yang, D.C.H.; Blanche, J.G. Design and application guidelines for cycloid drives with machining tolerances. Mech. Mach. Theory 1990, 25, 487–501. [Google Scholar] [CrossRef]
- Kumar, N.; Kosse, V.; Oloyede, A. A new method to estimate effective elastic torsional compliance of single-stage cycloidal drives. Mech. Mach. Theory 2016, 105, 185–198. [Google Scholar] [CrossRef]
- Do, T.P.; Ziegler, P.; Eberhard, P. Review on contact simulation of beveloid and cycloid gears and application of a modern approach to treat deformations. Math. Comput. Model. Dyn. Syst. 2015, 21, 359–388. [Google Scholar] [CrossRef]
- Chen, B.; Zhong, H.; Liu, J.; Li, C.; Fang, T. Generation and investigation of a new cycloid drive with double contact. Mech. Mach. Theory 2012, 49, 270–283. [Google Scholar] [CrossRef]
- Demenego, A.; Vecchiato, D.; Litvin, F.L.; Nervegna, N.; Manco, S. Design and simulation of meshing of a cycloidal pump. Mech. Mach. Theory 2002, 37, 311–332. [Google Scholar] [CrossRef]
- Litvin, F.L.; Feng, P.H. Computerized design and generation of cycloidal gearings. Mech. Mach. Theory 1996, 31, 891–911. [Google Scholar] [CrossRef]
- Dion, J.L.; Pawelski, Z.; Chianca, V.; Zdziennicki, Z.; Peyret, N.; Uszpolewicz, G.; Ormezowski, J.; Mitukiewicz, G.; Lelasseux, X. Theoretical and experimental study for an improved cycloid drive model. J. Appl. Mech. 2019, 87, 011002. [Google Scholar] [CrossRef]
- Hsieh, C.F.; Fuentes-Aznar, A. Performance prediction method of cycloidal speed reducers. J. Braz. Soc. Mech. Sci. Eng. 2019, 41, 186. [Google Scholar] [CrossRef]
- Lin, K.S.; Chan, K.Y.; Lee, J.J. Kinematic error analysis and tolerance allocation of cycloidal gear reducers. Mech. Mach. Theory 2018, 124, 73–91. [Google Scholar] [CrossRef]
- Wikło, M.; Król, R.; Olejarczyk, K.; Kołodziejczyk, K. Output torque ripple for a cycloidal gear train. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2019, 233, 7270–7281. [Google Scholar] [CrossRef]
- Ivanovic, L.; Mackic, T.; Stojanovic, B. Analysis of the instantaneous friction coefficient of the trochoidal gear pair. J. Balk. Tribol. Assoc. 2016, 22, 281–293. [Google Scholar]
- Mackic, T.; Blagojevic, M.; Babic, Z.; Kostic, N. Influence of design parameters on cyclo drive efficiency. J. Balk. Tribol. Assoc. 2013, 19, 497–507. [Google Scholar]
- Mihailidis, A.; Athanasopoulos, E.; Agouridas, K. EHL film thickness and load dependent power loss of cycloid reducers. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2015, 230, 0954406215612815. [Google Scholar] [CrossRef]
- Olejarczyk, K.; Wikło, M.; Kołodziejczyk, K. The cycloidal gearbox efficiency for different types of bearings—Sleeves vs. needle bearings. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2019, 233, 7401–7411. [Google Scholar] [CrossRef]
- Gorla, C.; Davoli, P.; Rosa, F.; Longoni, C.; Chiozzi, F.; Samarani, A. Theoretical and experimental analysis of a cycloidal speed reducer. J. Mech. Des. 2008, 130, 112604. [Google Scholar] [CrossRef]
- Malhotra, S.K.; Parameswaran, M.A. Analysis of a cycloid speed reducer. Mech. Mach. Theory 1983, 18, 491–499. [Google Scholar] [CrossRef]
- Li, S. Design and strength analysis methods of the trochoidal gear reducers. Mech. Mach. Theory 2014, 81, 140–154. [Google Scholar] [CrossRef]
- Blagojevic, M.; Marjanovic, N.; Djordjevic, Z.; Stojanovic, B.; Disic, A. A new design of a two-stage cycloidal speed reducer. J. Mech. Des. 2011, 133, 085001. [Google Scholar] [CrossRef]
- Li, X.; Chen, B.K.; Wang, Y.W.; Lim, T.C. Mesh stiffness calculation of cycloid-pin gear pair with tooth profile modification and eccentricity error. J. Cent. South Univ. 2018, 25, 1717–1731. [Google Scholar] [CrossRef]
- Li, X.; Li, C.Y.; Wang, Y.W.; Chen, B.K.; Lim, T.C. Analysis of a cycloid speed reducer considering tooth profile modification and clearance-fit output mechanism. J. Mech. Des. 2017, 139, 12. [Google Scholar] [CrossRef]
- Sun, X.; Han, L.; Wang, J. Design and transmission error analysis of cbr reducer. J. Mech. Des. 2019, 141, 082301. [Google Scholar] [CrossRef]
- Li, T.; An, X.; Deng, X.; Li, J.; Li, Y. A new tooth profile modification method of cycloidal gears in precision reducers for robots. Appl. Sci. 2020, 10, 1266. [Google Scholar] [CrossRef] [Green Version]
- Li, T.; Tian, M.; Xu, H.; Deng, X.; Su, J. Meshing contact analysis of cycloidal-pin gear in RV reducer considering the influence of manufacturing error. J. Braz. Soc. Mech. Sci. Eng. 2020, 42, 133. [Google Scholar] [CrossRef]
- Xu, L.X.; Chen, B.K.; Li, C.Y. Dynamic modelling and contact analysis of bearing-cycloid-pinwheel transmission mechanisms used in joint rotate vector reducers. Mech. Mach. Theory 2019, 137, 432–458. [Google Scholar] [CrossRef]
- Csobán, A. Impacts of a profile failure of the cycloidal drive of a planetary gear on transmission gear. Lubricants 2021, 9, 71. [Google Scholar] [CrossRef]
- Ivanović, L.; Devedžić, G.; Ćuković, S.; Mirić, N. Modeling of the meshing of trochoidal profiles with clearances. J. Mech. Des. 2012, 134, 041003. [Google Scholar] [CrossRef]
- Bednarczyk, S. Analysis of the cycloidal reducer output mechanism while taking into account machining deviations. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2021, 235, 7299–7313. [Google Scholar] [CrossRef]
- Blagojevic, M.; Marjanovic, N.; Djordjevic, Z.; Stojanovic, B.; Marjanovic, V.; Vujanac, R.; Disic, A. Numerical and experimental analysis of the cycloid disc stress state. Teh. Vjesn. 2014, 21, 377–382. [Google Scholar]
- Hwang, Y.W.; Hsieh, C.F. Geometry design and analysis for trochoidal-type speed reducers: With conjugate envelopes. Trans. Can. Soc. Mech. Eng. 2006, 30, 261–278. [Google Scholar] [CrossRef]
- Litvin, F.L.; Fuentes, A. Gear Geometry and Applied Theory, 2nd ed.; Cambridge University Press: New York, NY, USA, 2004; pp. 350–354. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Descriptions | Values |
|---|---|---|
| Tooth number | 39 | |
| Pin number | 40 | |
| Pin position radius | 82 mm | |
| Pin radius | 3.5 mm | |
| Pin-groove radius | 3.505 mm | |
| Eccentricity | 1.5 mm | |
| Cycloid gear width | 12 mm | |
| 0 μm | ||
| 8 μm | ||
| Eccentricity error | 0 μm | |
| Radial error | 0 μm |
| Case 1 | Case 2 | Case 3 | Case 4 | |
|---|---|---|---|---|
| TPM | √ | √ | × | × |
| × | √ | × | √ |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, X.; Tang, L.; He, H.; Sun, L. Design and Load Distribution Analysis of the Mismatched Cycloid-Pin Gear Pair in RV Speed Reducers. Machines 2022, 10, 672. https://doi.org/10.3390/machines10080672
Li X, Tang L, He H, Sun L. Design and Load Distribution Analysis of the Mismatched Cycloid-Pin Gear Pair in RV Speed Reducers. Machines. 2022; 10(8):672. https://doi.org/10.3390/machines10080672
Chicago/Turabian StyleLi, Xuan, Linggao Tang, Haidong He, and Lining Sun. 2022. "Design and Load Distribution Analysis of the Mismatched Cycloid-Pin Gear Pair in RV Speed Reducers" Machines 10, no. 8: 672. https://doi.org/10.3390/machines10080672
APA StyleLi, X., Tang, L., He, H., & Sun, L. (2022). Design and Load Distribution Analysis of the Mismatched Cycloid-Pin Gear Pair in RV Speed Reducers. Machines, 10(8), 672. https://doi.org/10.3390/machines10080672