
Speed-Dependent Bearing Models for Dynamic Simulations of Vertical Rotors

Abstract
:1. Introduction
2. Experiment
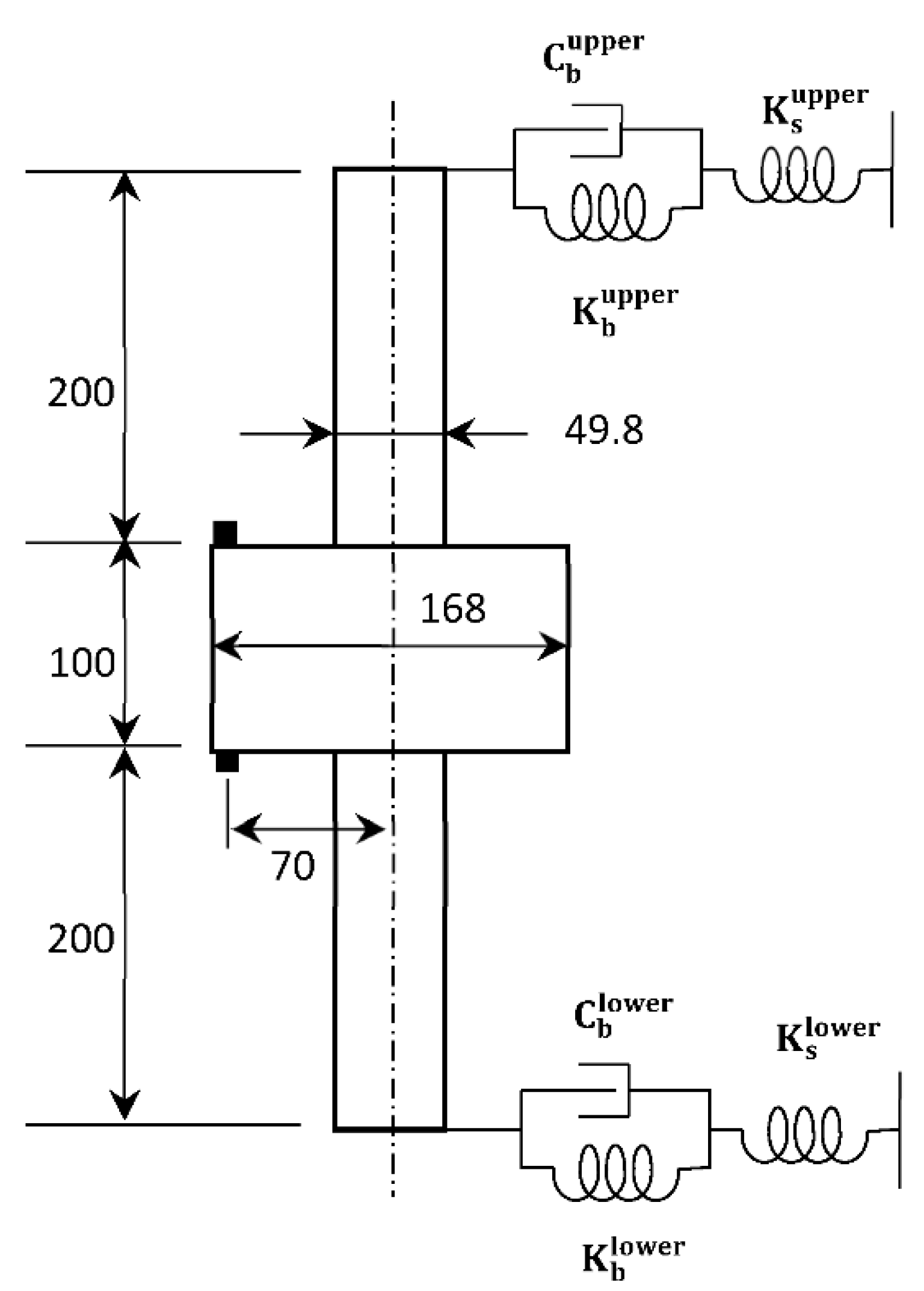
2.1. Rotor Rig Description
2.2. Bearing Description
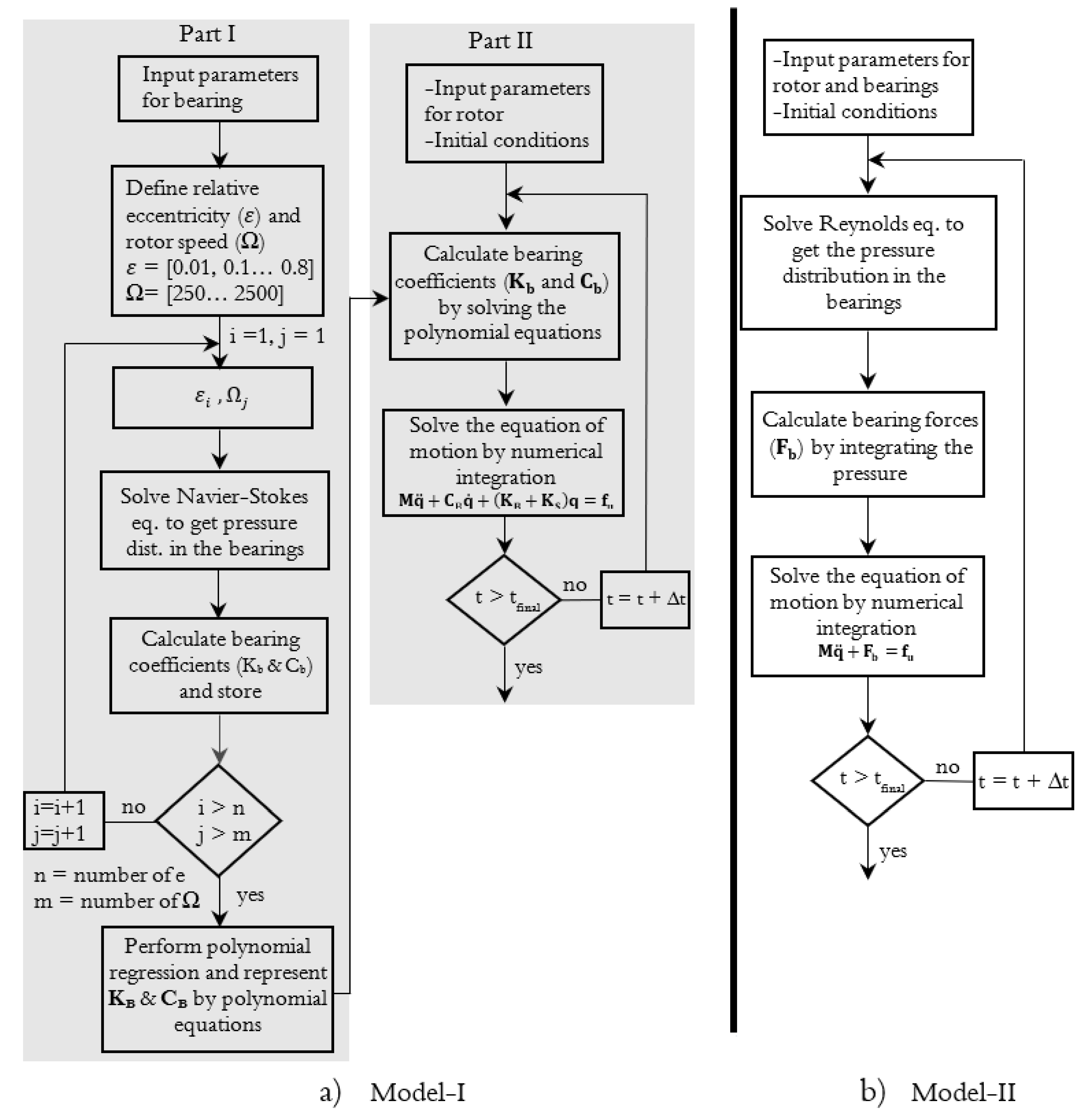
3. Numerical Model
3.1. Bearing Model
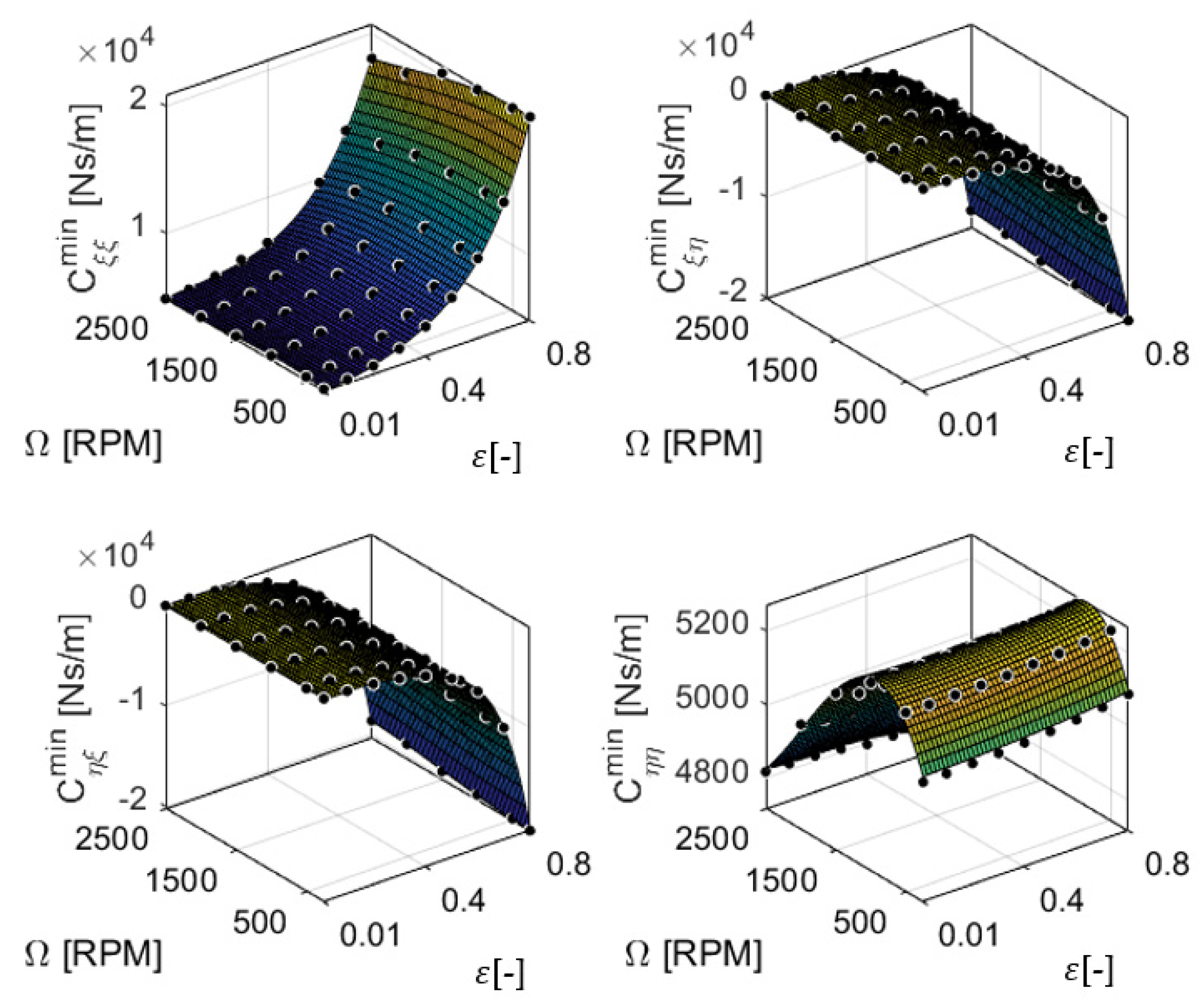
3.1.1. Bearing Coefficients Using Fluid Film Lubrication Theory
3.1.2. Least-Square Approximation and Measures of Fitness
3.2. Rotor Rig Model
4. Results
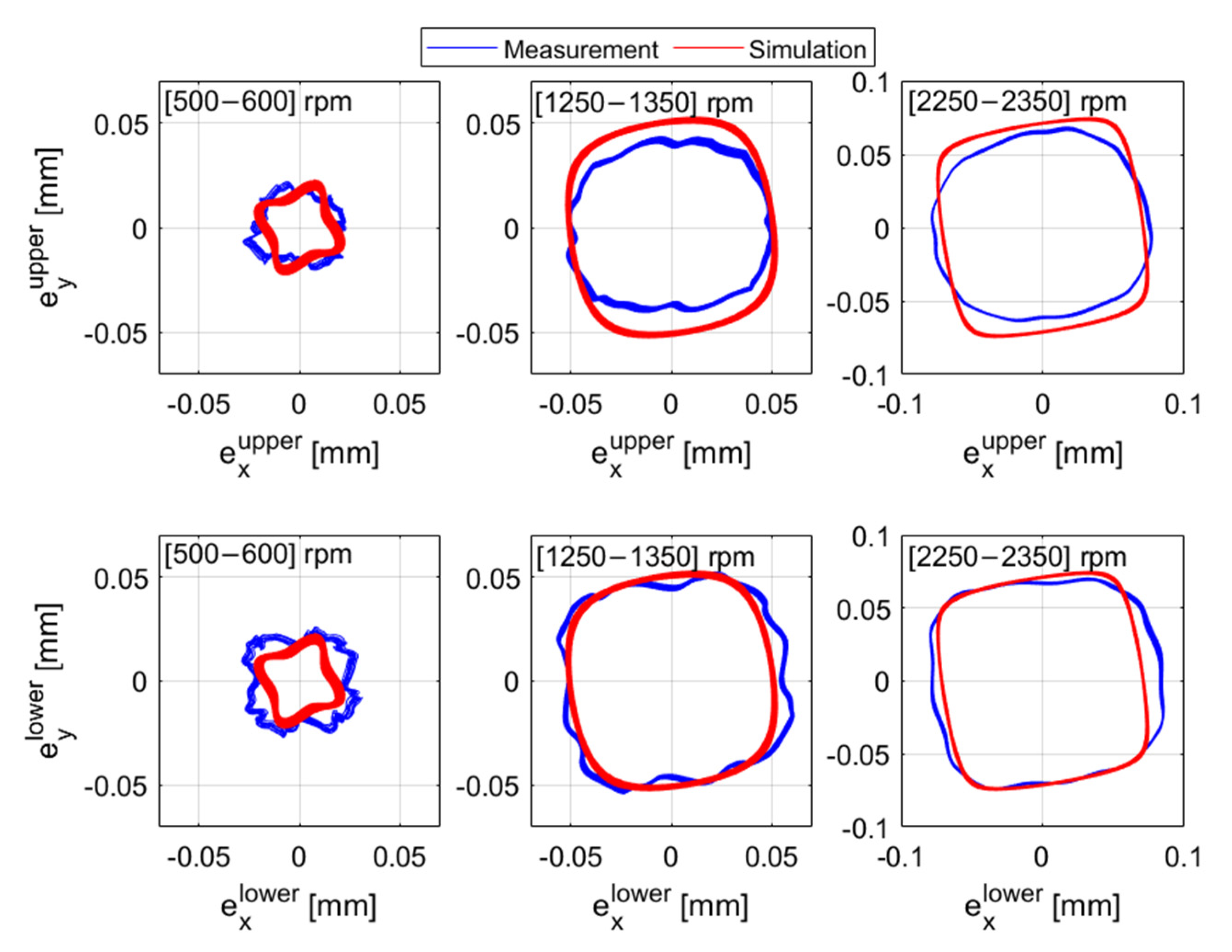
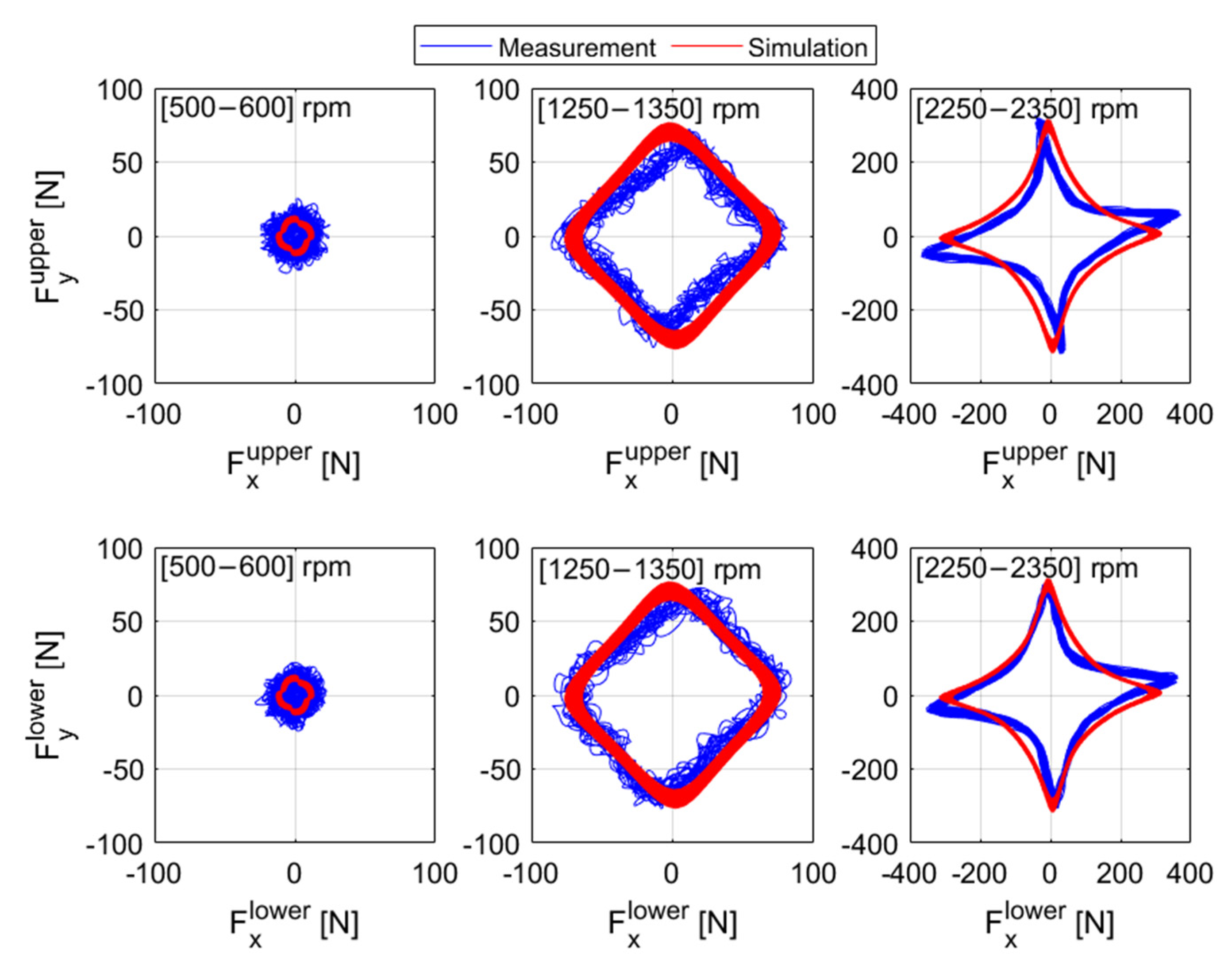
4.1. Responses under Constant Rotor Spin Speed
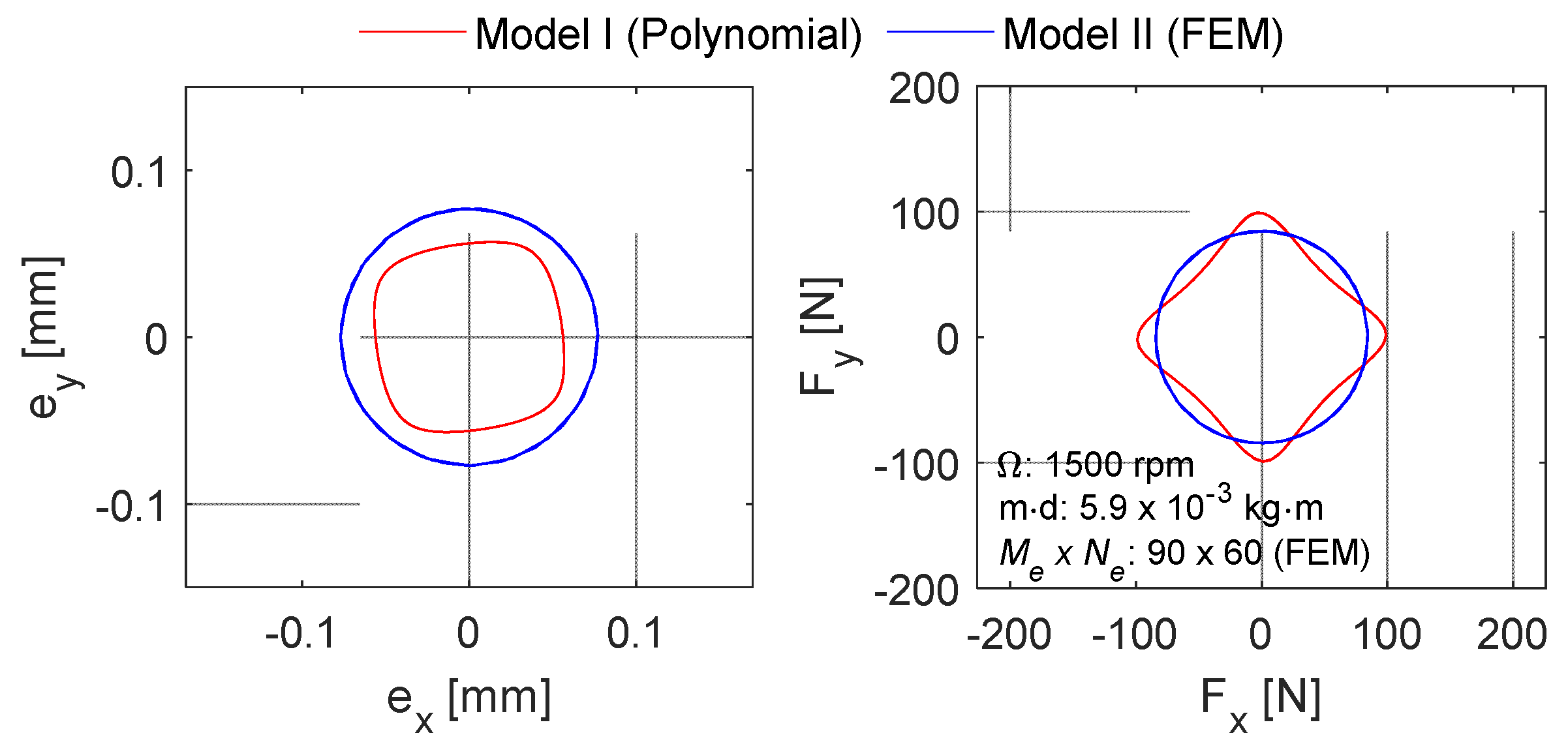
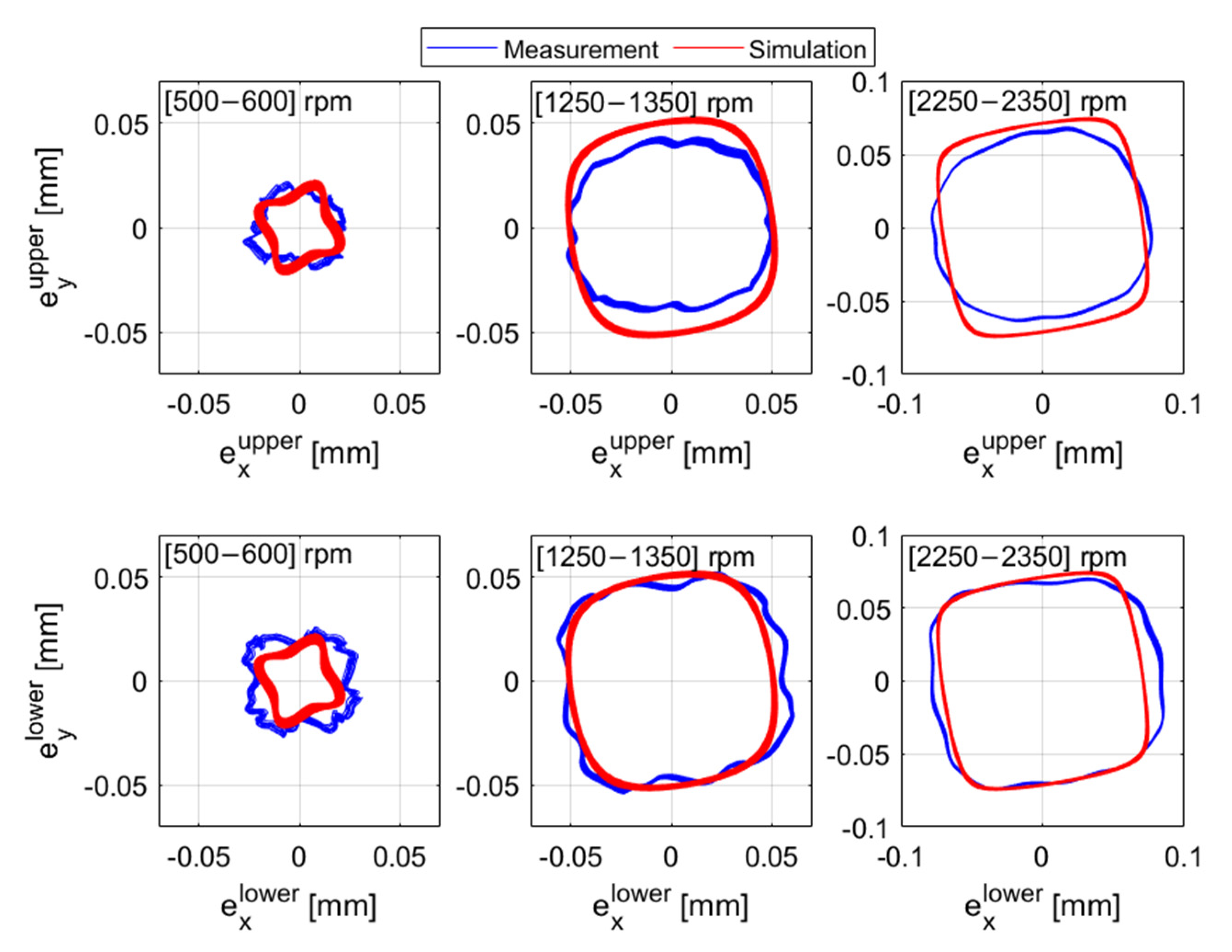
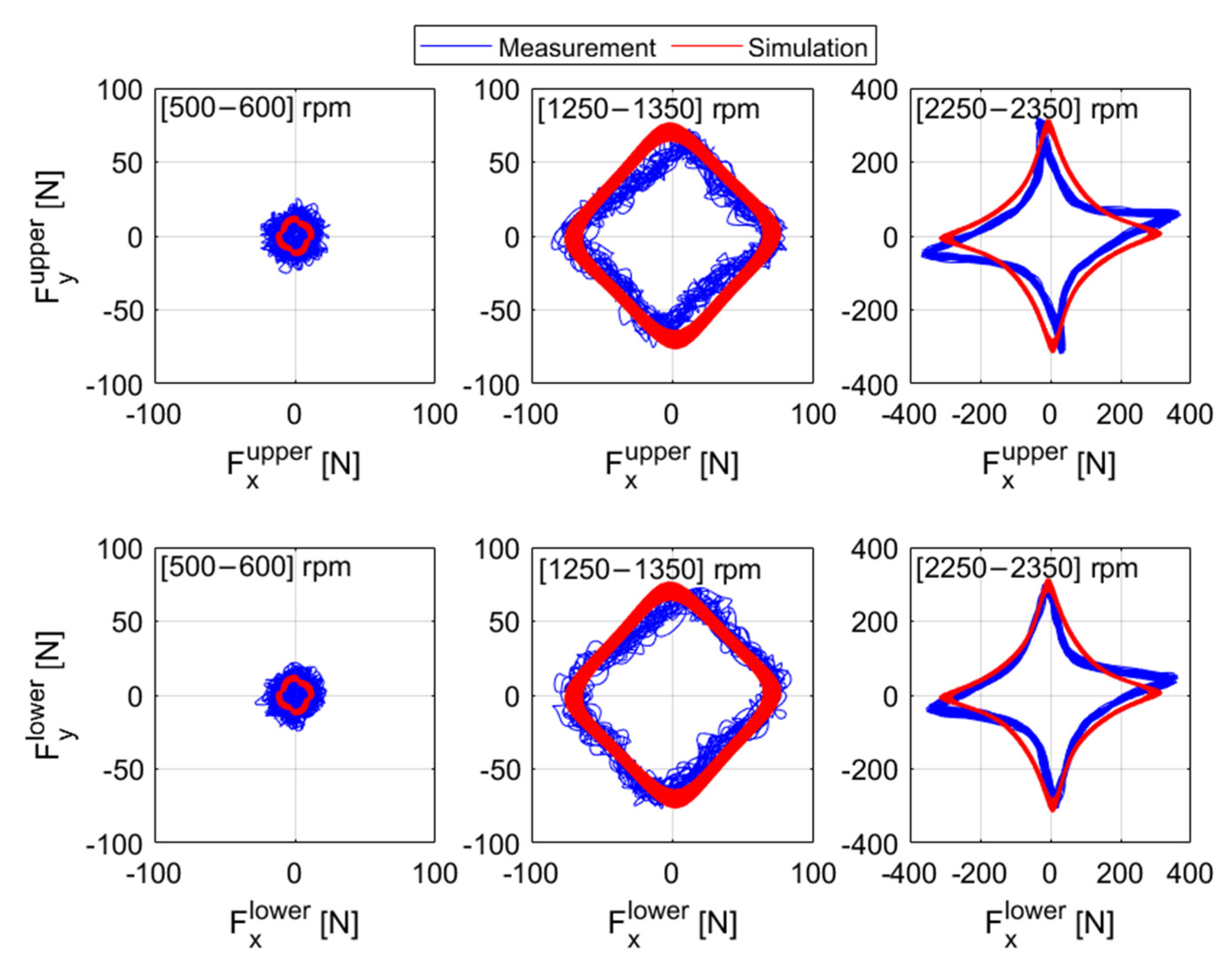
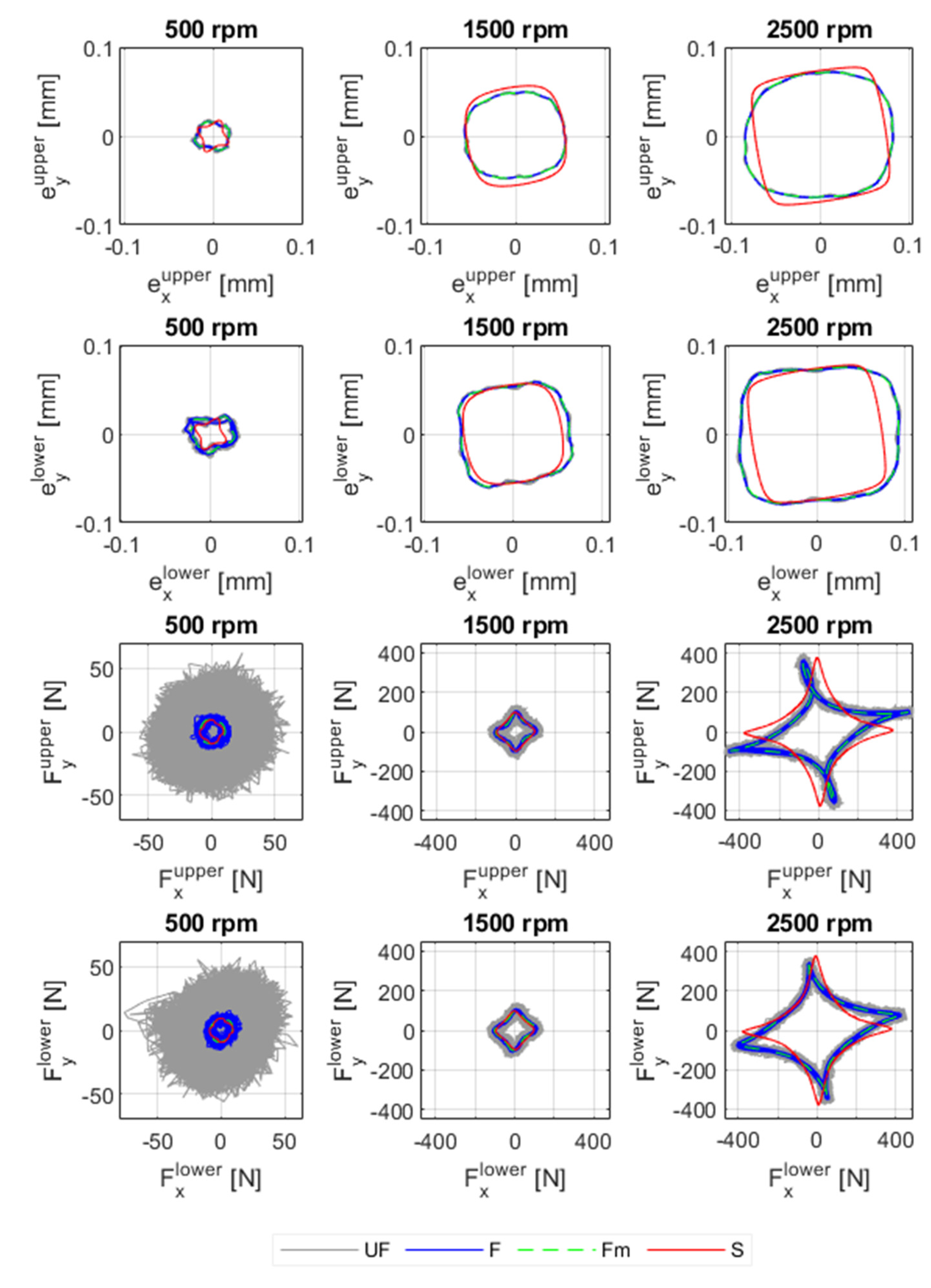
4.1.1. Orbits and Bearing Reaction Forces
4.1.2. Resultant Displacements and Forces
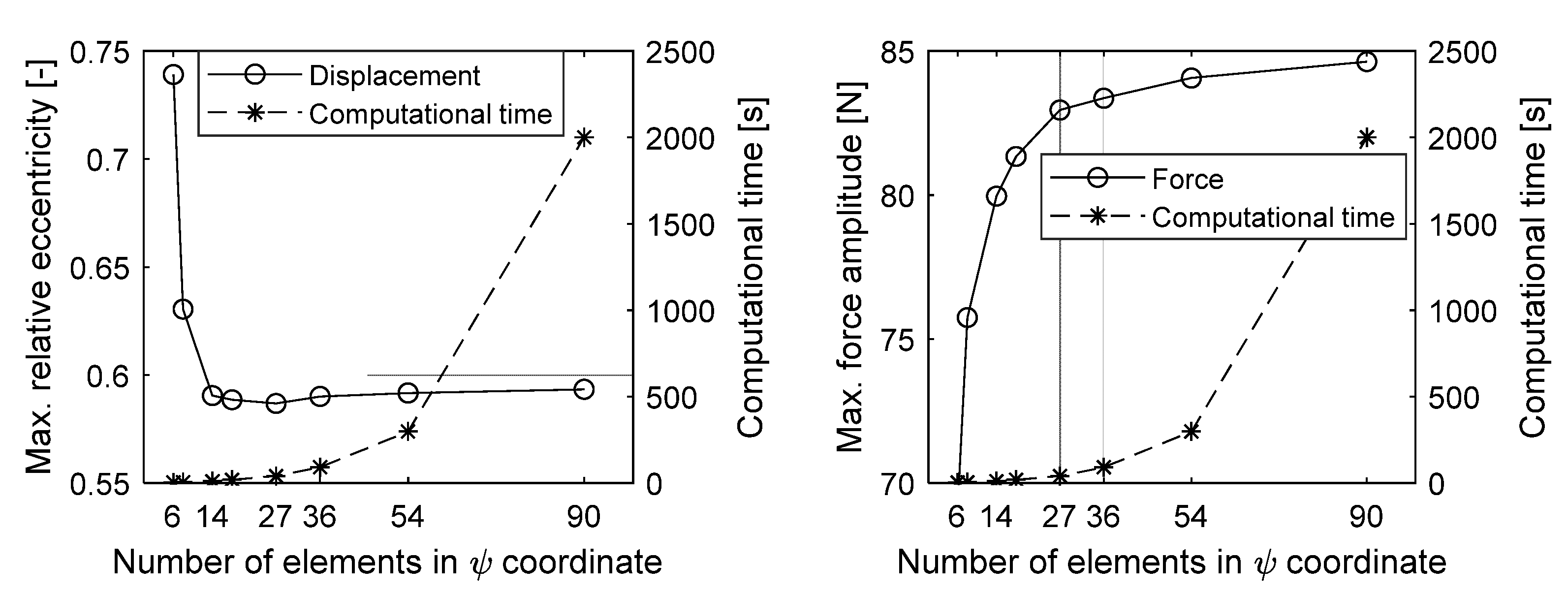
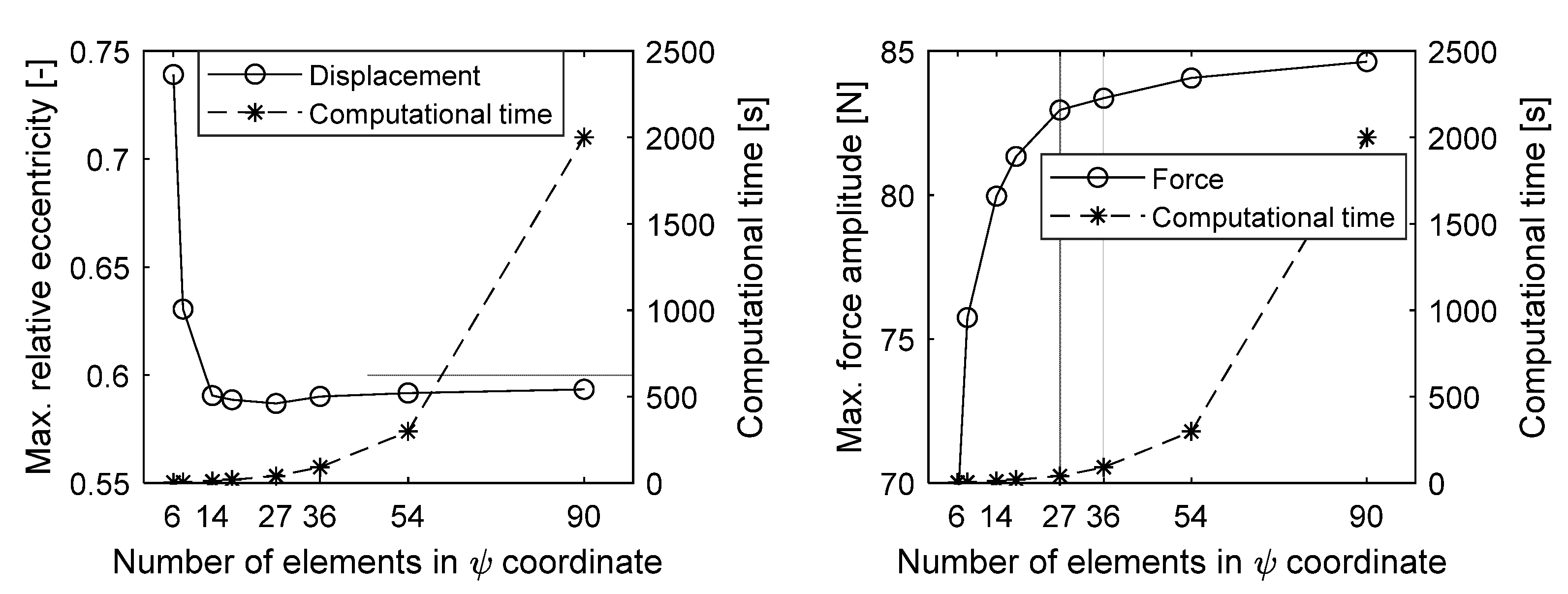
4.1.3. Computational Time
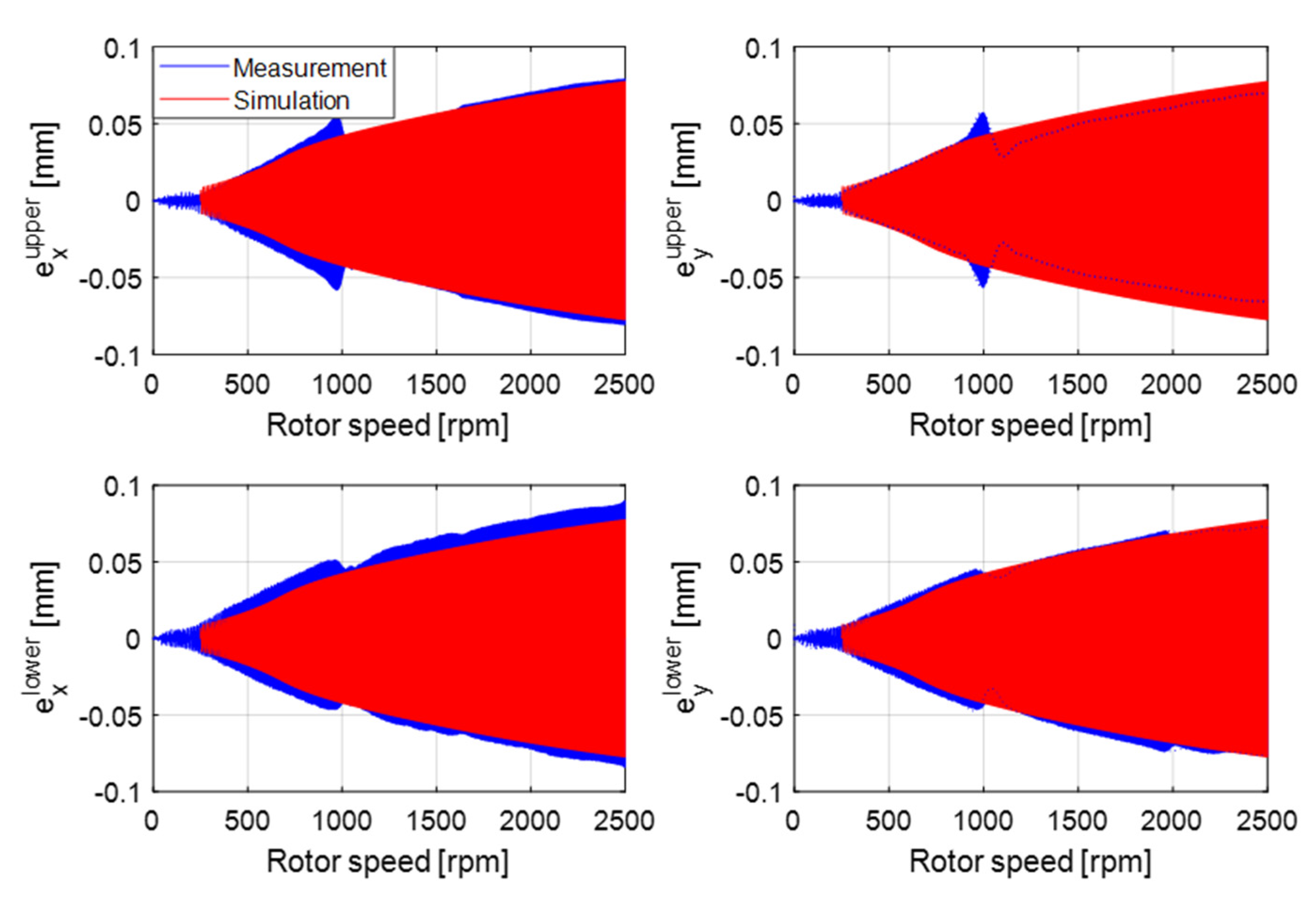
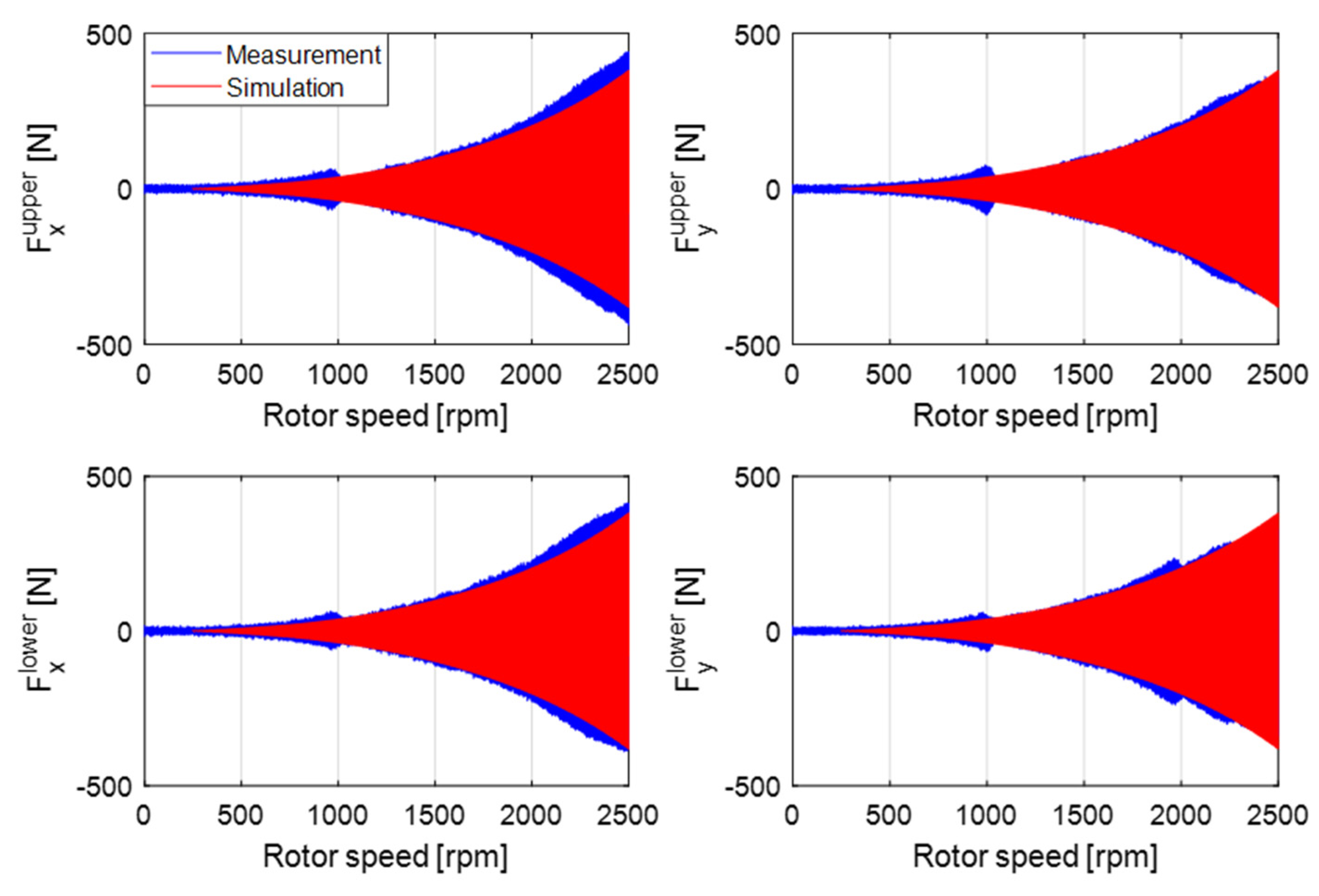
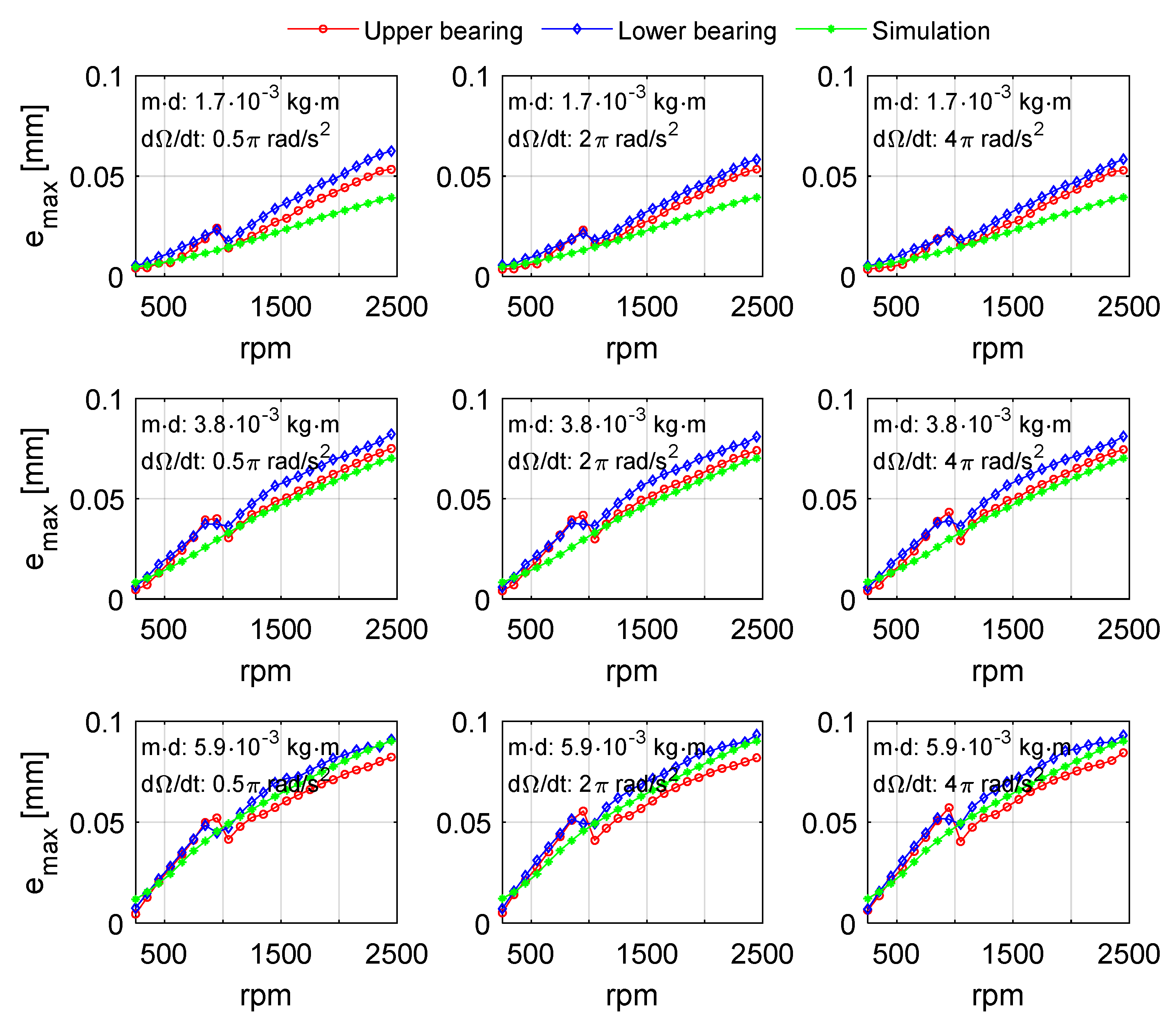
4.2. Transient Responses
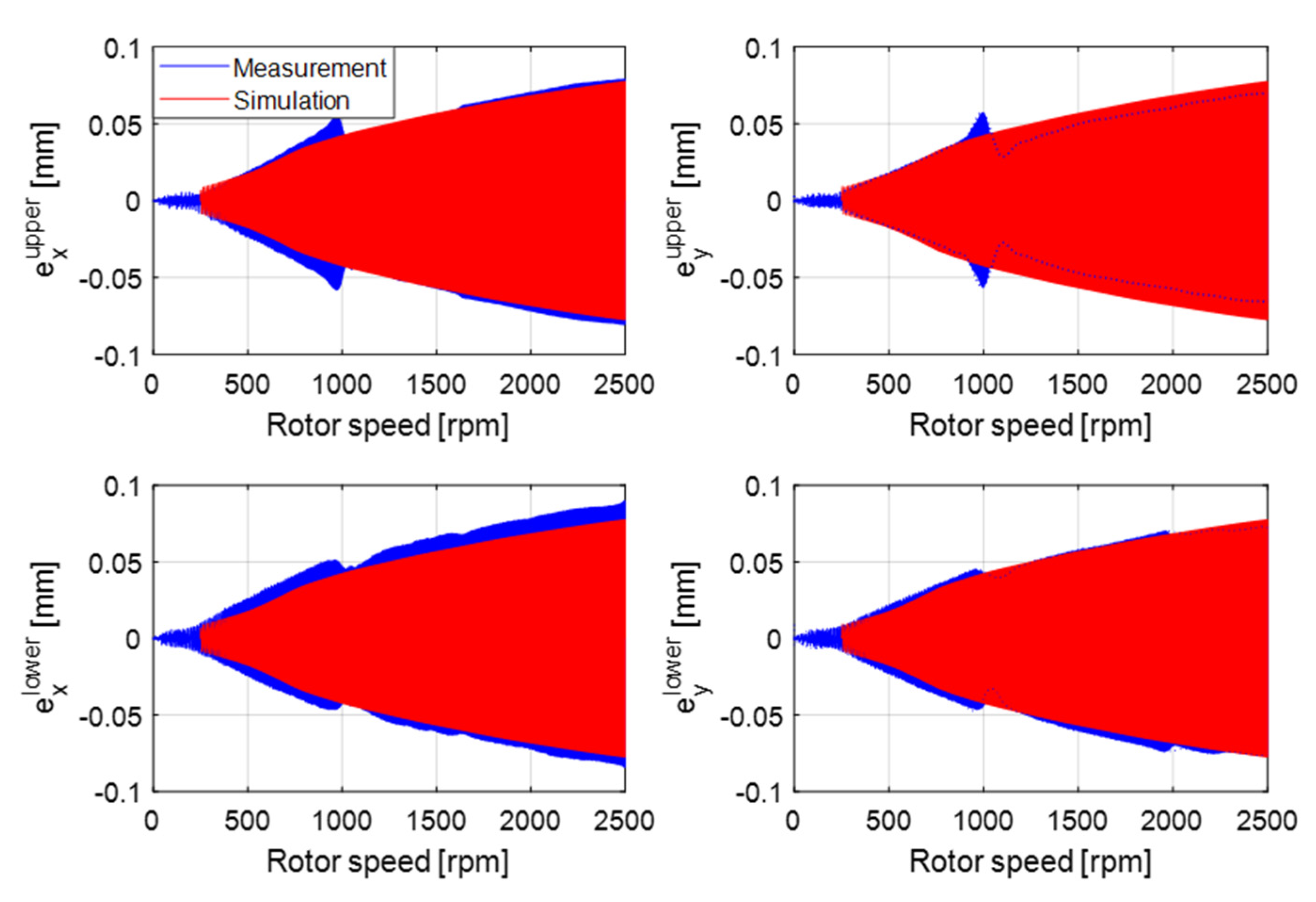
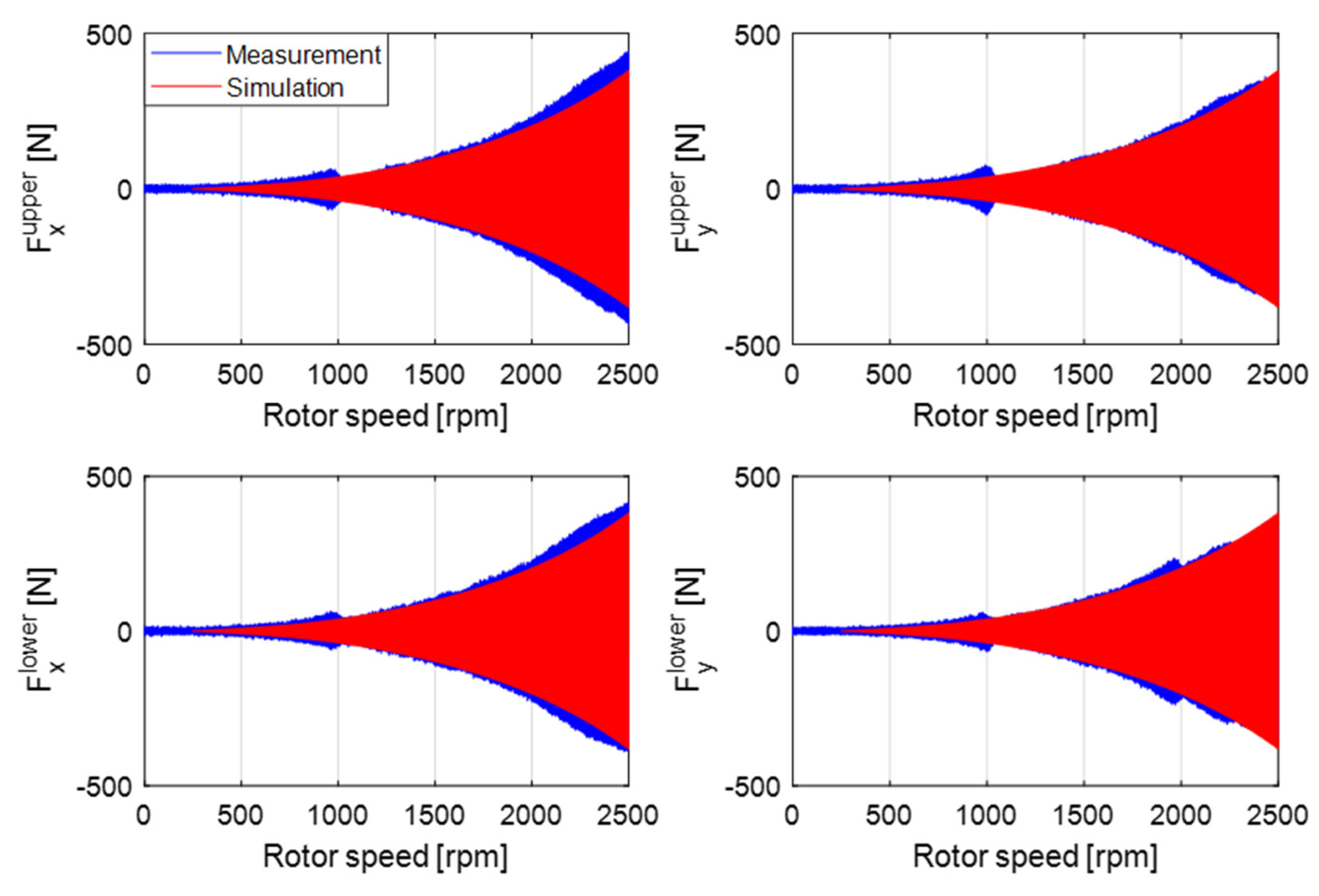
4.2.1. Displacements and Bearing Reaction Forces
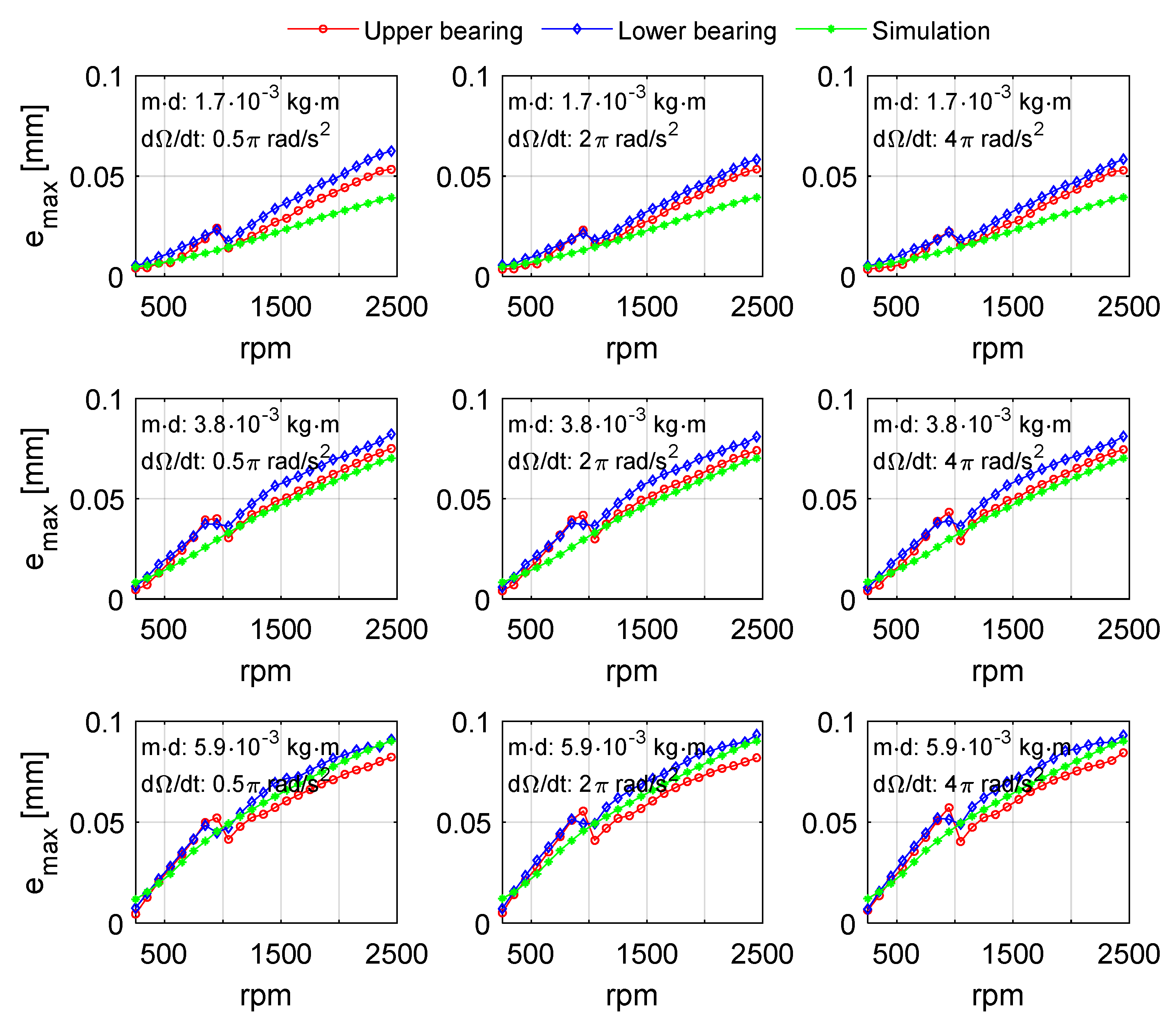
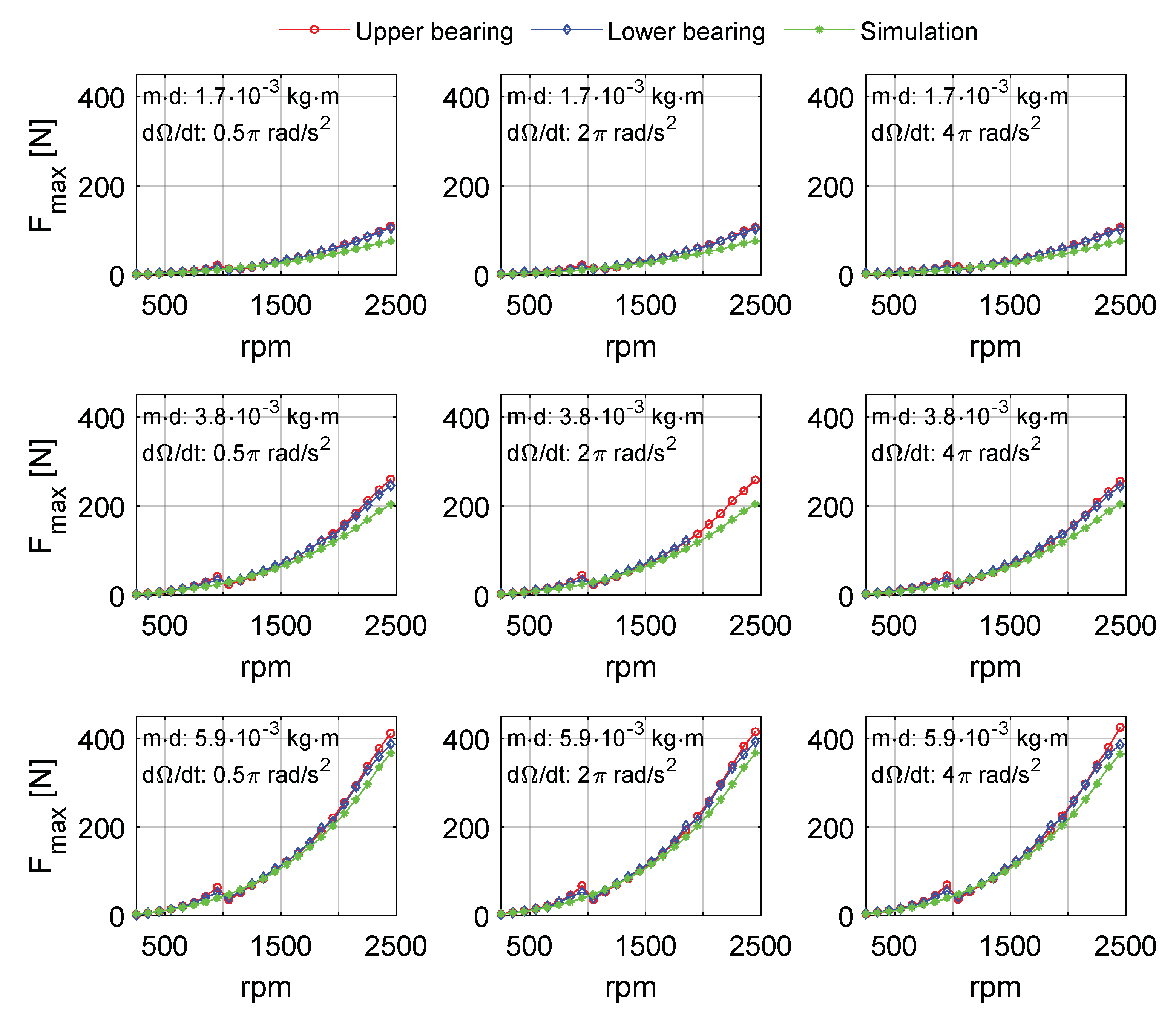
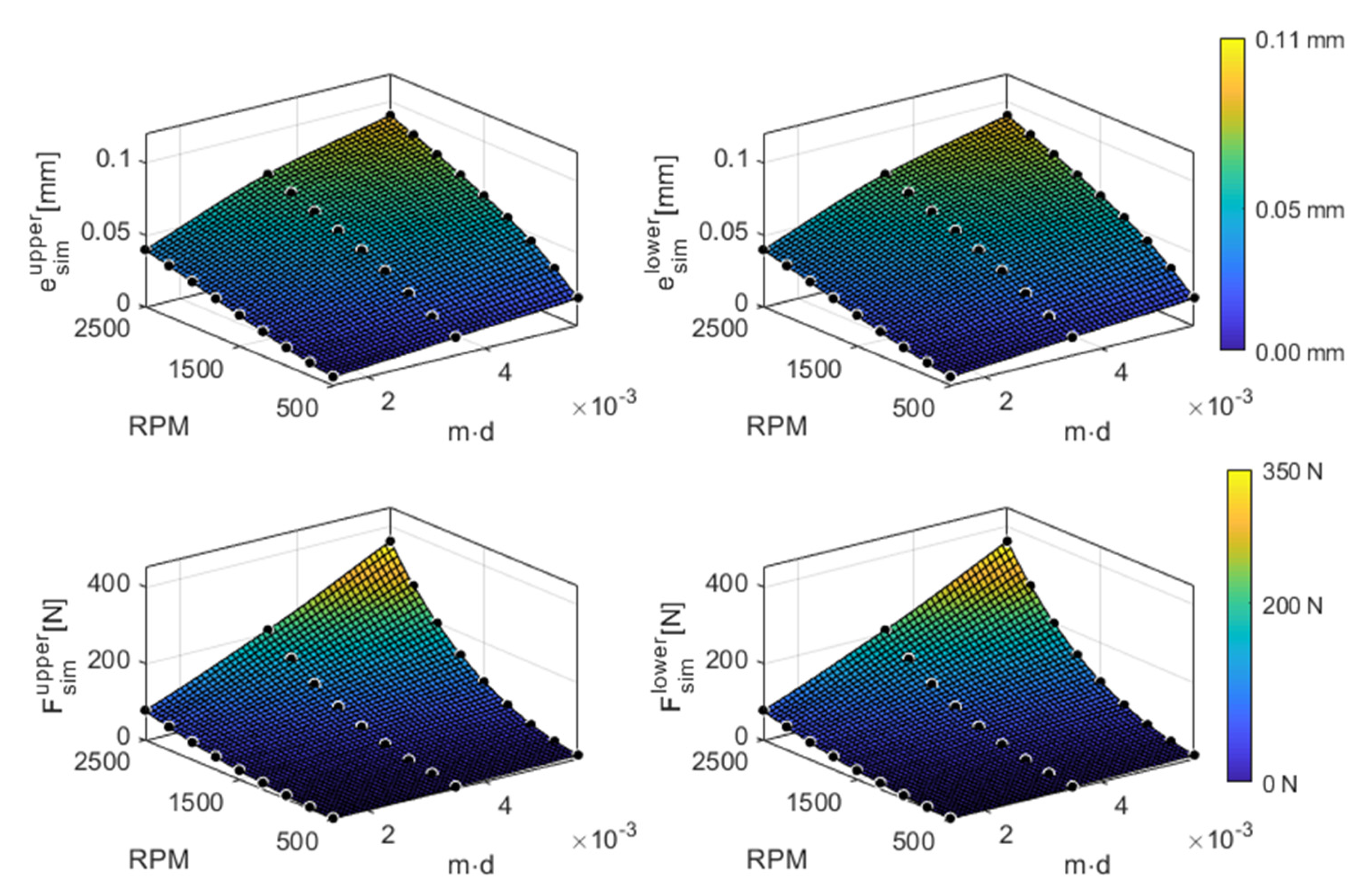
4.2.2. Resultant Displacements and Forces
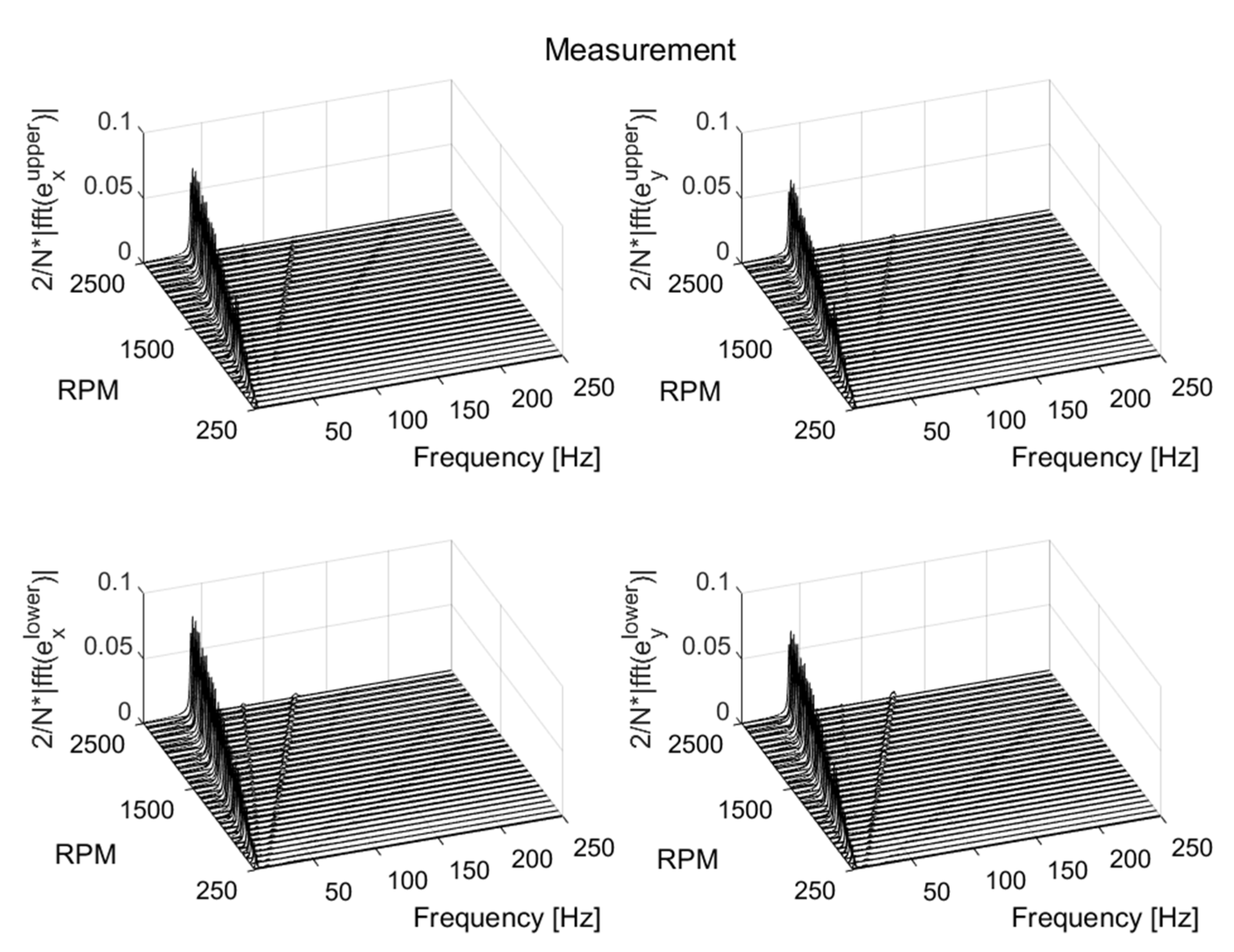
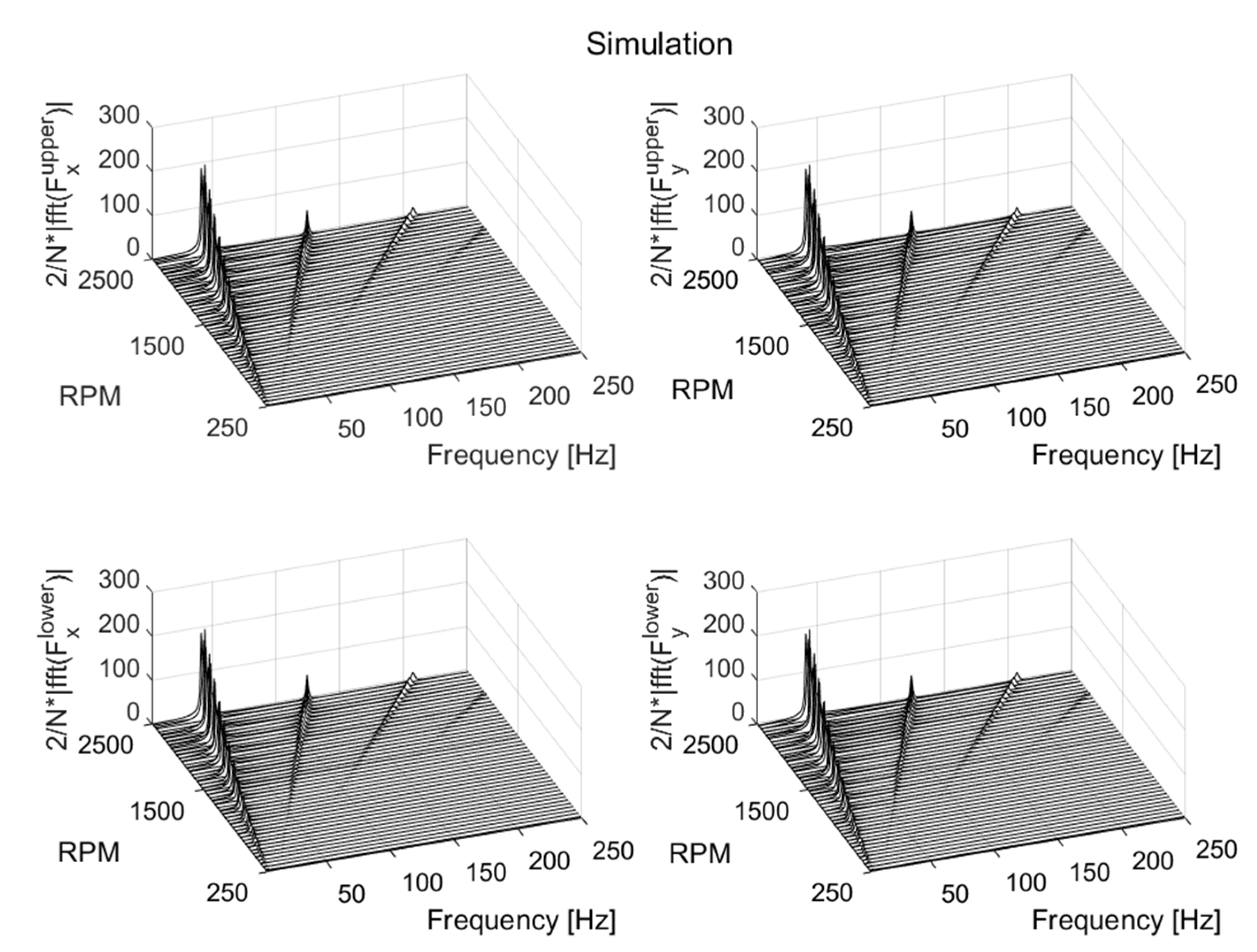
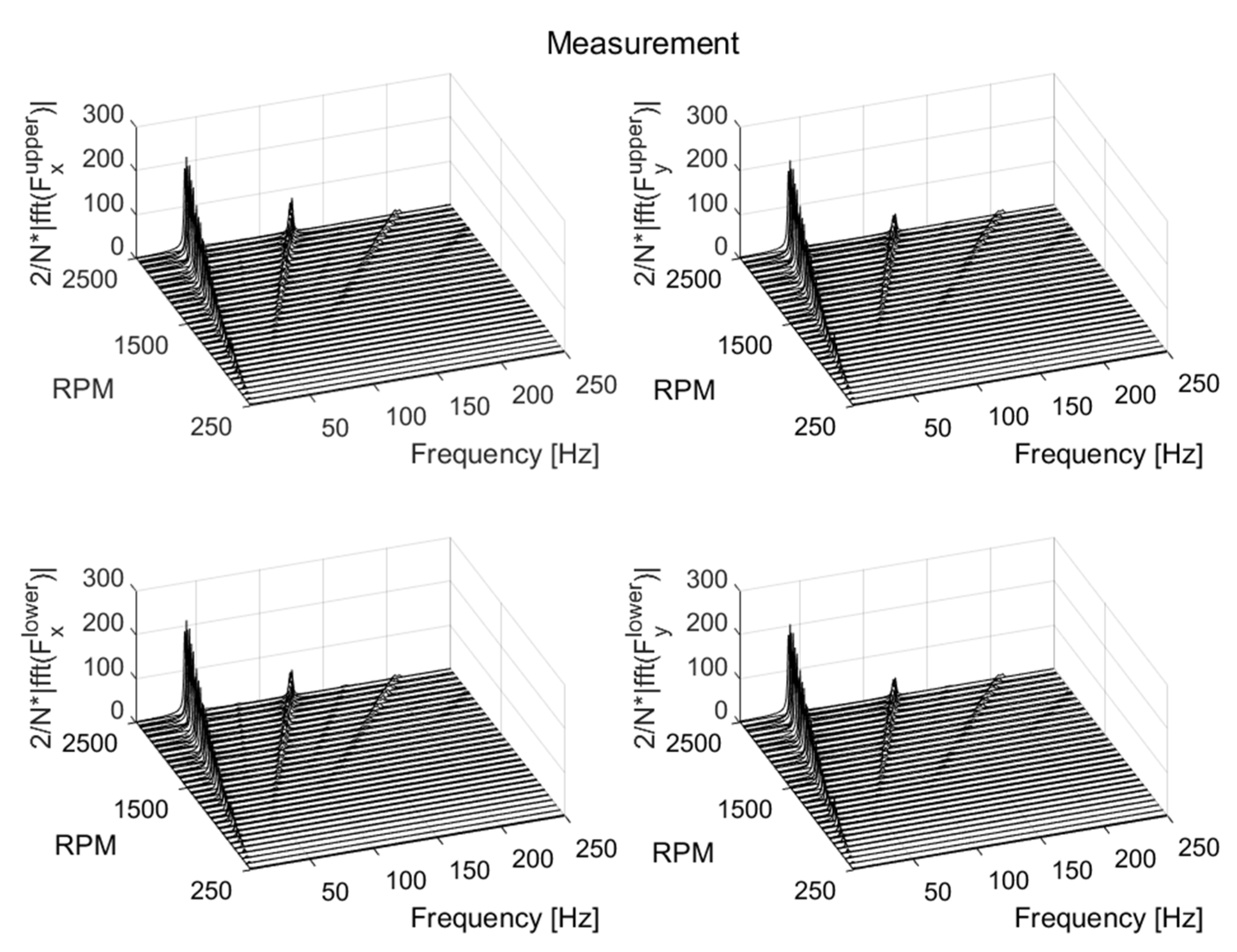
4.2.3. Frequency Response Function (FFT)
5. Discussions and Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
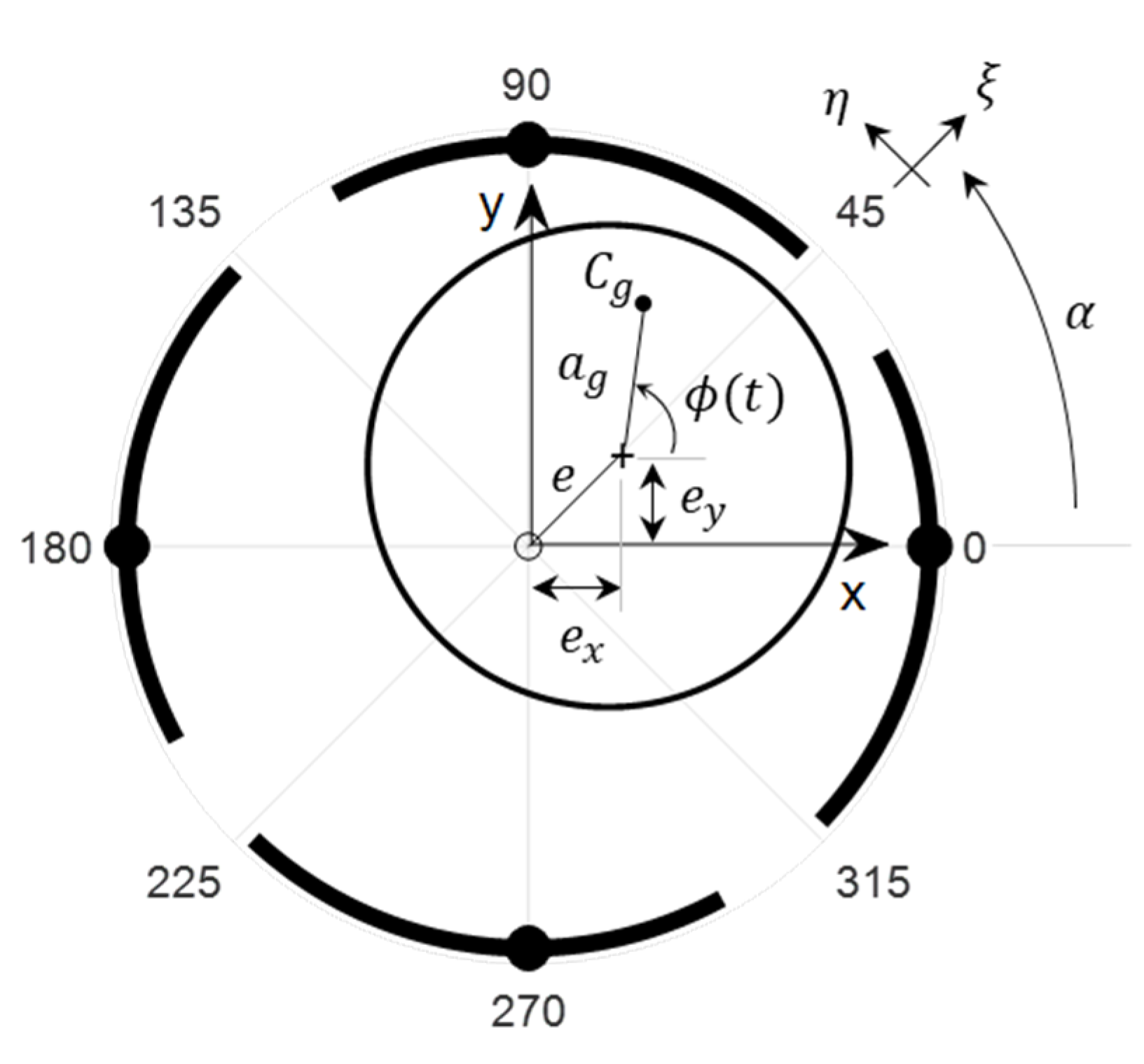
| The length of the line connecting the center of the rotor and center of gravity (m) | |
| Center of gravity (-) | |
| Maximum, minimum bearing damping in the local (i,j → ξ,η) coordinates (N-s/m) | |
| Bearing (upper, lower) damping matrix in the local ξ and coordinates (N-s/m) | |
| Bearing damping matrix in the Cartesian coordinates (N-s/m) | |
| The minimum distance between the center of the journal and the unbalance mass (m) | |
| Eccentricity (m) | |
| Eccentricity in the Cartesian x-direction (m) | |
| Eccentricity in the Cartesian y-direction (m) | |
| , | Measured, simulated mean amplitude of the orbit (for i: upper or lower bearing), (m) |
| Unbalance force vector (N) | |
| Measured, simulated mean force (for i: upper or lower bearing), (N) | |
| G | Gyroscopic matrix |
| Maximum, minimum bearing damping in the local (i,j → ξ,η) coordinates (N/m) | |
| Bearing (upper, lower) stiffness matrix in the local ξ and coordinates (N/m) | |
| Bearing stiffness matrix in the Cartesian coordinates (N/m) | |
| The stiffness of the bracket structure (N/m) | |
| L | The sum of the square errors |
| M | Mass matrix (kg) |
| Unbalance mass (kg) | |
| Me | Number of elements in the axial direction (-) |
| Number of pads (-) | |
| Ne | Number of elements in the circumferential direction (-) |
| R | Radius of the journal (m) |
| Adjusted R-square | |
| r | The polynomial degrees of the relative eccentricity (-) |
| s | The polynomial degrees of the rotor speed (-) |
| Transformation matrix (-) | |
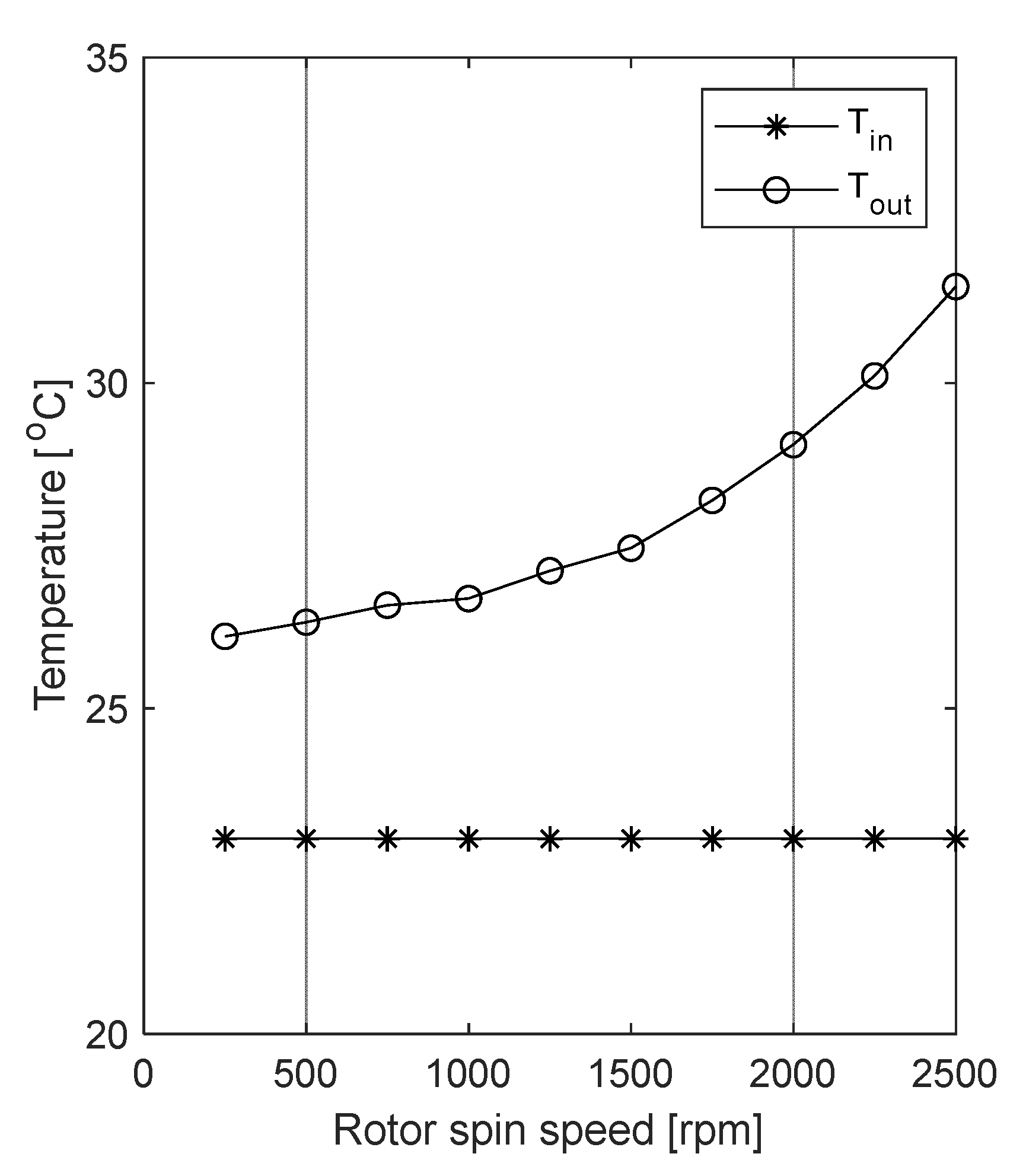
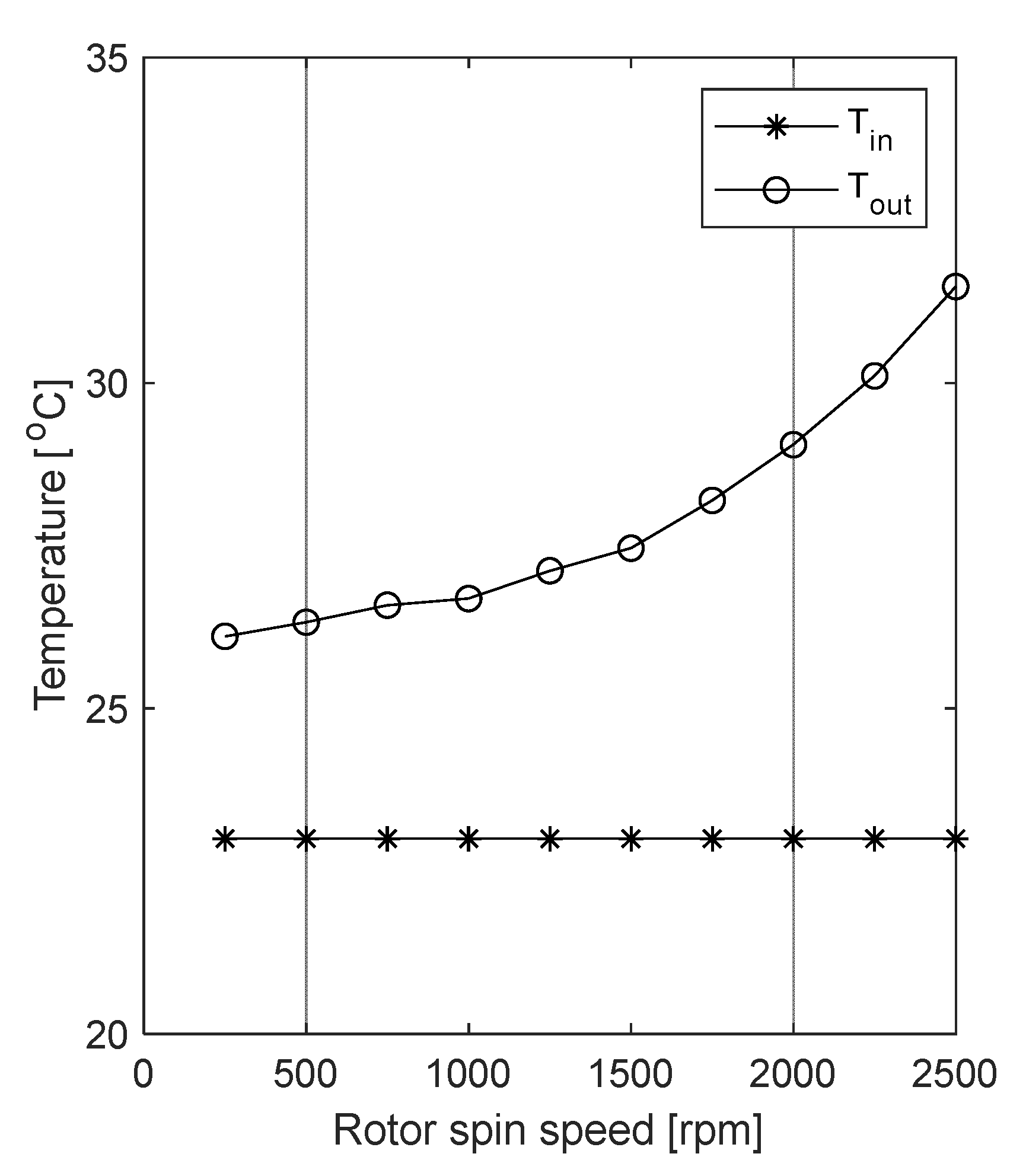
| Tin | The inlet temperature of the lubricant (supply lubricant) (°C) |
| Tout | The outlet average temperature of the lubricant (°C) |
| Calculated maximum or minimum local bearing coefficient, values from RAPPID (N/m or N-s/m) | |
| An approximated maximum or minimum local bearing coefficient (N/m or N-s/m) | |
| , | Percentage errors of the amplitude of the orbit, (-) |
| Percentage errors of the bearing force (-) | |
| Greek symbols | |
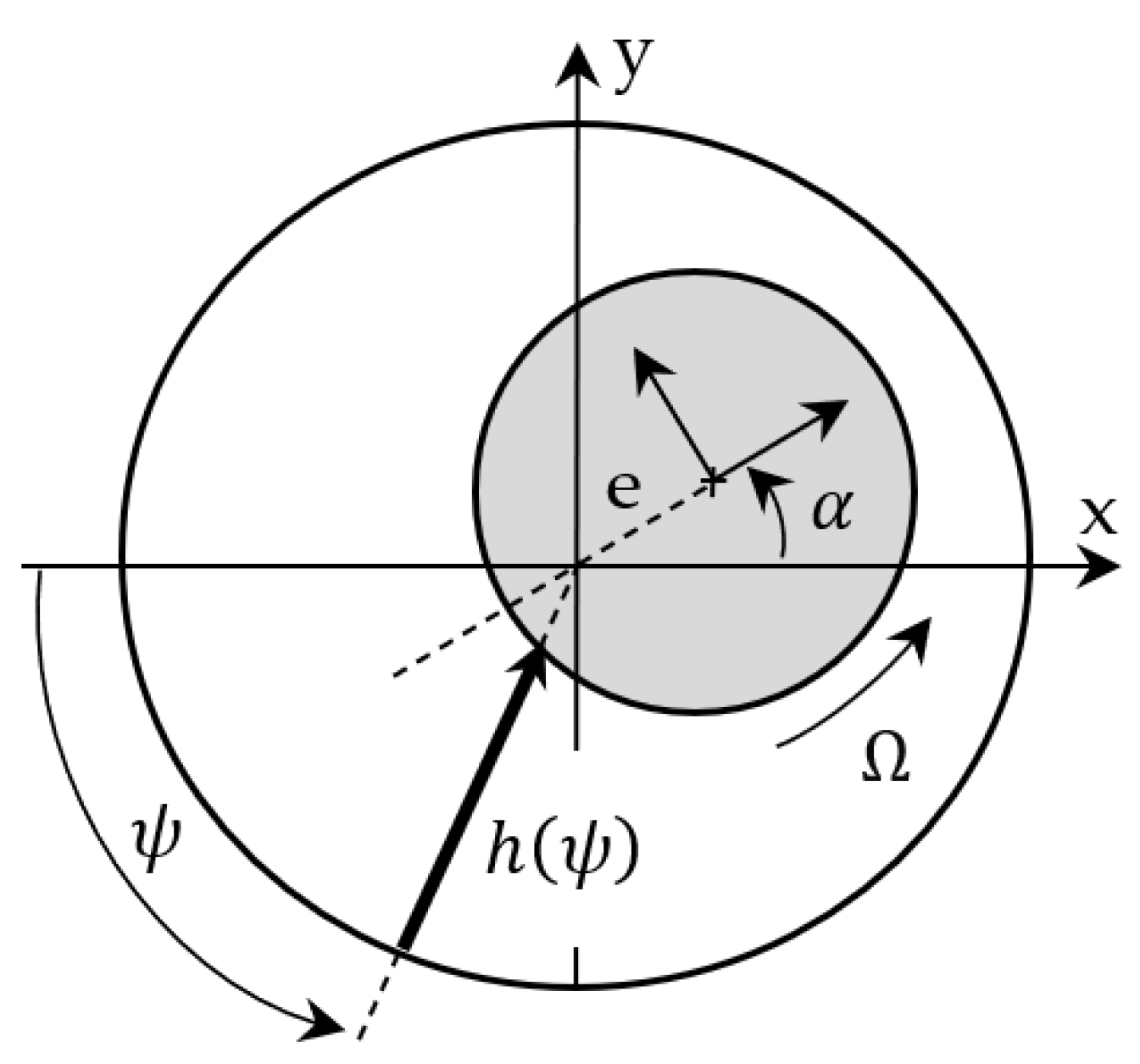
| Eccentricity angle: the angle of the line connecting the center of the bearing and center of journal from the positive x-axis, whirling speed (rad, rad/s) | |
| Regression coefficients | |
| Relative eccentricity, = e/Cb [-] | |
| ,, | Angle of the line connecting the center of the journal and center of gravity of the journal from the positive x-axis, rotor spin speed, and rotor angular acceleration (rad, rad/s, rad/s2) |
| ξ | Rotating coordinate that passes through the center of the bearing and collinear to the eccentricity line |
| η | Rotating coordinate that is perpendicular to the eccentricity line |
| Ω | Constant angular speed of the journal (rad/s) |
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| RMSE% [%] | RMSE% [%] | RMSE% [%] | RMSE% [%] | RMSE% [%] | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Rotor speed () | Second order () | 60.8 | 0.543 | 43.3 | 0.768 | 23.7 | 0.93 | 11.3 | 0.984 | 4.7 | 0.997 | |
| 58.2 | 0.587 | 40.1 | 0.803 | 20.6 | 0.948 | 9.2 | 0.989 | 3.5 | 0.998 | |||
| 57.5 | 0.592 | 39.6 | 0.806 | 20.2 | 0.949 | 9 | 0.989 | 3.5 | 0.998 | |||
| 29.2 | 0.838 | 17.3 | 0.943 | 6.2 | 0.992 | 2.2 | 0.999 | 1.0 | 0.999 | |||
| 50.5 | 0.588 | 25.4 | 0.895 | 11.4 | 0.978 | 4.4 | 0.996 | 1.4 | 0.999 | |||
| 50.6 | 0.631 | 23.7 | 0.919 | 9.9 | 0.985 | 3.6 | 0.998 | 1.2 | 0.999 | |||
| 50.9 | 0.63 | 23.8 | 0.918 | 10 | 0.985 | 3.6 | 0.998 | 1.2 | 0.999 | |||
| 20.7 | 0.802 | 5.9 | 0.983 | 1.8 | 0.998 | 0.6 | 0.999 | 0.5 | 0.999 | |||
| 28.9 | 0.839 | 16.9 | 0.944 | 5.8 | 0.993 | 2 | 0.999 | 1.6 | 0.999 | |||
| 56.9 | 0.599 | 39 | 0.811 | 19.8 | 0.951 | 8.8 | 0.99 | 3.3 | 0.998 | |||
| 57.7 | 0.593 | 39.6 | 0.807 | 20.2 | 0.949 | 9 | 0.989 | 3.4 | 0.998 | |||
| 0.7 | 0.999 | 0.6 | 0.999 | 0.6 | 0.999 | 0.6 | 0.999 | 0.6 | 0.999 | |||
| 21.0 | 0.797 | 6.2 | 0.981 | 2.2 | 0.997 | 1.7 | 0.998 | 1.7 | 0.998 | |||
| 50.6 | 0.633 | 23.5 | 0.92 | 9.9 | 0.985 | 3.6 | 0.998 | 1.3 | 0.999 | |||
| 50.4 | 0.633 | 23.5 | 0.92 | 9.8 | 0.985 | 3.6 | 0.998 | 1.4 | 0.999 | |||
| 0.8 | 0.93 | 0.8 | 0.929 | 0.8 | 0.926 | 0.8 | 0.921 | 0.8 | 0.915 | |||
| Third order () | 62.1 | 0.524 | 35.8 | 0.841 | 24 | 0.928 | 11.6 | 0.983 | 4.9 | 0.997 | ||
| 59.4 | 0.57 | 31.9 | 0.875 | 20.8 | 0.946 | 9.5 | 0.989 | 3.7 | 0.998 | |||
| 58.7 | 0.575 | 31.4 | 0.878 | 20.5 | 0.948 | 9.3 | 0.989 | 3.6 | 0.998 | |||
| 29.8 | 0.831 | 10.4 | 0.979 | 6.2 | 0.992 | 2.3 | 0.998 | 0.9 | 0.999 | |||
| 51.6 | 0.57 | 26.2 | 0.888 | 11.5 | 0.978 | 4.4 | 0.996 | 1.4 | 0.999 | |||
| 51.7 | 0.615 | 24.4 | 0.914 | 10 | 0.985 | 3.7 | 0.997 | 1.3 | 0.999 | |||
| 52 | 0.614 | 24.5 | 0.913 | 10.1 | 0.985 | 3.7 | 0.998 | 1.2 | 0.999 | |||
| 21.2 | 0.794 | 6.0 | 0.983 | 1.8 | 0.998 | 0.6 | 0.999 | 0.4 | 0.999 | |||
| 29.4 | 0.833 | 10.0 | 0.98 | 5.8 | 0.993 | 2.0 | 0.999 | 1.5 | 0.999 | |||
| 58.1 | 0.582 | 30.8 | 0.882 | 20.0 | 0.95 | 9.0 | 0.989 | 3.5 | 0.998 | |||
| 58.9 | 0.576 | 31.4 | 0.879 | 20.4 | 0.948 | 9.2 | 0.989 | 3.6 | 0.998 | |||
| 0.6 | 0.999 | 0.6 | 0.999 | 0.5 | 0.999 | 0.5 | 0.999 | 0.5 | 0.999 | |||
| 21.4 | 0.789 | 6.3 | 0.981 | 2.2 | 0.997 | 1.7 | 0.998 | 1.6 | 0.998 | |||
| 51.7 | 0.617 | 24.3 | 0.915 | 10.0 | 0.985 | 3.7 | 0.998 | 1.3 | 0.999 | |||
| 51.5 | 0.618 | 24.2 | 0.915 | 9.9 | 0.985 | 3.6 | 0.998 | 1.3 | 0.999 | |||
| 0.3 | 0.985 | 0.3 | 0.986 | 0.3 | 0.986 | 0.3 | 0.986 | 0.3 | 0.990 | |||
Appendix B
| 1.8E6 | 2.6E5 | 2.9E5 | 9.5E5 | 1E4 | 1.3E3 | 1.3E3 | 7.2E3 | |
| 2.3E6 | 5.1E5 | 5.1E5 | 6.1E5 | 9.7E3 | 2.3E3 | 2.3E3 | 3.1E3 | |
| 1.1E6 | 1.6E5 | 1.7E5 | 5.8E5 | −3.2E2 | −4.2E1 | −5.3E1 | −1.8E2 | |
| −8.5E5 | 3.9E4 | 5E4 | 3.1E5 | 2.3E3 | 9.3E2 | 9.3E2 | 1.6E3 | |
| −5E5 | 3E4 | 3.7E4 | 3.2E5 | −3.5E2 | −9.1E1 | −9.2E1 | −2.1E1 | |
| 3.2E3 | −3.1E2 | −1.3E3 | −1.8E4 | −1.2E2 | −0.4E0 | 2.6E0 | −1.2E2 | |
| −8.9E5 | −1.8E4 | −1E4 | 9.6E4 | 8.5E2 | 4.1E2 | 4.2E2 | 5.5E2 | |
| −6.9E5 | −4.6E3 | 1.6E3 | 1.6E5 | −3.1E2 | −9.4E1 | −8.4E1 | −1.8E1 | |
| 1.1E4 | −4.7E3 | −5.5E3 | −2.4E4 | 1.5E1 | −3.3E0 | −4.6E0 | 1.5E0 | |
| 1.4E3 | 1.2E3 | 1.4E3 | −9.9E3 | 8.6E1 | 1.3E1 | 1.1E1 | 2.1E1 | |
| 3E6 | 4.6E5 | 4.5E5 | 9.2E4 | 6.9E3 | 1.1E3 | 1.1E3 | 2.6E2 | |
| 2.7E6 | 4.6E5 | 4.5E5 | 1.3E5 | −3.2E2 | −5.7E1 | −5.8E1 | −7.2E1 | |
| −1.2E5 | −2.2E4 | −2.2E4 | −1.6E4 | −3E1 | −1.9E1 | −1.8E1 | −4.6E1 | |
| 1E4 | −1.8E2 | 5E2 | −6.5E3 | 1.5E2 | 2E1 | 2.2E1 | −3.2E1 | |
| 1.8E6 | 2.6E5 | 2.6E5 | 4E4 | 3.7E3 | 5.8E2 | 5.8E2 | 8.1E1 | |
| 1.9E6 | 2.9E5 | 2.8E5 | 6E4 | −1.4E2 | −1.2E1 | −1.5E1 | −4.4E1 | |
| −8.8E4 | −1.4E4 | −1.3E4 | −1.4E3 | −2.4E1 | −1.2E1 | −1.1E1 | −2.8E1 | |
| 6.9E3 | −7.9E2 | −8.5E2 | 2.1E3 | 9E1 | 5.1E0 | 4.4E0 | −3E0 | |
| 9.5E5 | −2.7E5 | −2.5E5 | 5.6E5 | 7.2E3 | −1.2E3 | −1.3E3 | 5.1E3 | |
| 5.9E5 | −4.8E5 | −4.8E5 | 1.5E3 | 3.1E3 | −2.2E3 | −2.2E3 | −0.4E0 | |
| 5.9E5 | −1.6E5 | −1.5E5 | 3.4E5 | −9.6E1 | 6.4E1 | 5.4E1 | −1.8E2 | |
| 3.4E5 | −6.2E4 | −5E4 | 1.3E3 | 1.6E3 | −9.2E2 | −9.2E2 | −0.4E0 | |
| 3.1E5 | −4.5E4 | −3.7E4 | −4.1E2 | −2E2 | 9E1 | 8.9E1 | −2.2E1 | |
| −2.9E4 | −1E3 | −1.9E3 | −1.1E4 | −2.1E2 | −9.3E0 | −6.1E0 | −1.3E2 | |
| 1.6E5 | −2.3E3 | 6.5E3 | −1.5E3 | 6.9E2 | −4.3E2 | −4.4E2 | −2.7E0 | |
| 1.7E5 | −1.2E4 | −4.4E3 | −3.6E3 | −1.1E2 | 4.4E1 | 5E1 | −9.2E0 | |
| −4.9E4 | −7.9E2 | −8.9E2 | 1.7E2 | −1.8E2 | −3.2E1 | −3.5E1 | −2.4E0 | |
| −2.9E4 | −3.1E3 | −2.6E3 | −4.8E3 | −1E2 | −2E1 | −2.2E1 | 6.2E1 | |
| 7.5E4 | −4.1E5 | −4.2E5 | 3.8E2 | 2.4E2 | −1.1E3 | −1.1E3 | 1.2E0 | |
| 1.2E5 | −4.1E5 | −4.2E5 | 1.6E3 | −2.8E1 | 6.7E1 | 6.8E1 | −2E0 | |
| −1.8E4 | 2.2E4 | 2.2E4 | −1.3E3 | −2E1 | 1.6E1 | 1.7E1 | −4.2E0 | |
| −9.7E3 | −4E3 | −3.1E3 | −1E3 | −3.8E0 | −3.9E1 | −3.9E1 | 5.8E0 | |
| 1.2E4 | −2.3E5 | −2.4E5 | 1.5E3 | 1.5E1 | −5.5E2 | −5.5E2 | 0.5E0 | |
| 4.1E4 | −2.5E5 | −2.6E5 | −2.3E1 | −7.4E1 | 3.6E1 | 3.6E1 | 0.7E0 | |
| 6.1E3 | 1.6E4 | 1.6E4 | −8.5E2 | 5.5E1 | 2.8E1 | 2.8E1 | −0.6E0 | |
| 1.3E4 | −5.4E2 | −6.8E2 | 2.2E3 | 1E2 | −1.1E1 | −1.2E1 | 0.7E0 |
Appendix C
Appendix D. Fluid Film Forces and FEM

| Descriptions | Values |
|---|---|
| Diameter (mm) | 49.815 |
| Length (mm) | 20 |
| Radial bearing clearance (μm) | 130 |
| Rotor speed (rpm) | 1500 |
| Lubricant | Q6 Handel oil |
| Oil supply pressure (MPa) | 0.01 |
| Viscosity (mPa·s) | 46.11 |
References
- Lund, J.W. Spring and Damping Coefficients for the Tilting-Pad Journal Bearing. A LE Trans. 1964, 7, 342–352. [Google Scholar] [CrossRef]
- Nicholas, J.C.; Gunter, E.J.; Allaire, P.E. Stiffness and Damping Coefficients for the Five-Pad Tilting-Pad Bearing. AS LE Trans. 1979, 22, 113–124. [Google Scholar] [CrossRef]
- Jones, G.J.; Martin, F.A. Geometry Effects in Tilting-Pad Journal Bearings. ASLE Trans. 1979, 22, 227–244. [Google Scholar] [CrossRef]
- Rouch, K.E. Dynamics of Pivoted-Pad Journal Bearings, Including Pad Translation and Rotation Effects. ASLE Trans. 1983, 26, 102–109. [Google Scholar] [CrossRef]
- Lund, J.W.; Arwas, E.B.; Cheng, H.S.; Ng, C.W.; Pan, C.H. Rotor-bearing dynamics design technology. In Design Handbook for Fluid Film Type Bearings; Report AFAPL-TR-65-45; Air Force Aero Propulsion Laboratory, Wright-Patterson Air Force Base: Dayton, OH, USA, 1965; Part III. [Google Scholar] [CrossRef]
- Lund, J.W.; Thomsen, K.K. A calculation method and data for the dynamic coefficients of oil-lubricated journal bearings. In Topics in Fluid Film Bearings Rotor Bearing System Design Optimization; ASME: New York, NY, USA, 1978; pp. 1–28. [Google Scholar]
- Someya, T. Journal-Bearing Databook; Springer: Berlin/Heidelberg, Germany, 1989; ISBN 978-3-642-525 11-7. [Google Scholar]
- Brockwell, K.; Dmochowski, W. Thermal effects in the tilting pad journal bearings. J. Phys. D Appl. Phys. 1992, 25, 384–392. [Google Scholar] [CrossRef]
- Desbordes, H.; Fillon, M.; Frêne, J.; Chan Hew Wai, C. The Effects of Three Dimensional Pad Deformations on Tilting-Pad Journal Bearings UnderDynamic Loading. ASME J. Tribol. 1995, 117, 379–384. [Google Scholar] [CrossRef]
- Fillon, M.; Desbordes, H.; Frêne, J.; Chan Hew Wai, C. A GlobalApproach of Thermal Effects Including Pad Deformations in Tilting-Pad, Journal Bearings Submitted to Unbalance Load. ASME J. Tribol. 1996, 118, 169–174. [Google Scholar] [CrossRef]
- Monmousseau, P.; Fillon, M.; Frêne, J. Transient Thermoelastohydrodynamic Study of Tilting-Pad Journal Bearings—Comparison between Experimental Data and Theoretical Results. ASME J. Tribol. 1997, 119, 401–407. [Google Scholar] [CrossRef]
- Monmousseau, P.; Fillon, M.; Frene, J. Transient Thermoelastohydrodynamic Study of Tilting-Pad Journal Bearings—Application to Bearing Seizure. J. Tribol. 1998, 120, 319–324. [Google Scholar] [CrossRef]
- Gadangi, R.K.; Palazzolo, A.B. Transient Analysis of Tilt Pad Journal Bearings Including Effects of Pad Flexibility and Fluid Film Temperature. J. Tribol. 1995, 117, 302–307. [Google Scholar] [CrossRef]
- Kim, J.; Palazzolo, A.; Gadangi, R. Dynamic characteristics of TEHD tilt pad journal bearing simulation includ-ing multiple mode pad flexibility model. J. Vib. Acoust. 1995, 117, 123–135. [Google Scholar] [CrossRef]
- Andrés, L.S.; Li, Y. Effect of Pad Flexibility on the Performance of Tilting Pad Journal Bearings-Benchmarking a Predictive Model. ASME J. Eng. Gas Turbines Power 2015, 137, 122503. [Google Scholar] [CrossRef]
- Kirk, R.G.; Reedy, S.W. Evaluation of Pivot Stiffness for Typical Tilting-Pad Journal Bearing Designs. J. Vib. Acoust. 1988, 110, 165–171. [Google Scholar] [CrossRef]
- Mehdi, S.M.; Jang, K.E.; Kim, T.H. Effects of pivot design on performance of tilting pad journal bearings. Tribol. Int. 2018, 119, 175–189. [Google Scholar] [CrossRef]
- Dang, P.V.; Chatterton, S.; Pennacchi, P. The Effect of the PivotStiffness on the Performances of Five-Pad Tilting pad Bearings. Lubricants 2019, 7, 61. [Google Scholar] [CrossRef] [Green Version]
- Dimond, T.; Younan, A.; Allaire, P. A Review of Tilting Pad Bearing Theory. Int. J. Rotating Mach. 2011, 2011, 908469. [Google Scholar] [CrossRef] [Green Version]
- White, M.F.; Chan, S.H. The Subsynchronous Dynamic Behavior of Tilting-Pad Journal Bearings. J. Tribol. 1992, 114, 167–173. [Google Scholar] [CrossRef]
- Childs, D.W.; Delgado, A.; Vannini, G. Tilting-pad bearings: Measured frequency characteristics of their rotordynamic coefficients. In Proceedings of the Fortieth Turbomachinery Symposium, Houston, TX, USA, 12–15 September 2011. [Google Scholar] [CrossRef]
- Wagner, L.F. On the Frequency Dependency of Tilting-Pad Journal Bearings. In Proceedings of the ASME Turbo Expo 2019: Turbomachinery Technical Conference and Exposition, Structures and Dynamics, Phoenix, AZ, USA, 17–21 June 2019; Volume 7B. [Google Scholar] [CrossRef]
- de Castro, H.F.; Cavalca, K.L.; Nordmann, R. Whirl and whip instabilities in rotor-bearing system considering a nonlinear force model. J. Sound Vib. 2008, 317, 273–293. [Google Scholar] [CrossRef]
- Shi, M.; Wang, D.; Zhang, J. Nonlinear dynamic analysis of a vertical rotor-bearing system. J. Mech. Sci. Technol. 2013, 27, 9–19. [Google Scholar] [CrossRef]
- Cha, M.; Glavatskih, S. Nonlinear dynamic behaviour of vertical and horizontal rotors in compliant liner tilting pad journal bearings: Some design considerations. Tribol. Int. 2015, 82, 142–152. [Google Scholar] [CrossRef]
- Nishimura, A.; Inoue, T.; Watanabe, Y. Nonlinear Analysis and Characteristic Variation of Self-Excited Vibration in the Vertical Rotor System Due to the Flexible Support of the Journal Bearing. J. Vib. Acoust. 2017, 140, 011016. [Google Scholar] [CrossRef]
- White, M.F.; Torbergsen, E.; Lumpkin, V.A. Rotordynamic analysis of a vertical pump with tiliting pad journal bearings. Wear 1997, 207, 128–136. [Google Scholar] [CrossRef]
- Pérez, N.; Rodríguez, C. Vertical rotor model with hydrodynamic journal bearings. Eng. Failure Anal. 2020, 119, 104964. [Google Scholar] [CrossRef]
- Huang, Y.; Tian, Z.; Chen, R.; Cao, H. A simpler method to calculate instability threshold speed of hydrodynamic journal bearing. Mech. Mach. Theory 2017, 108, 209–216. [Google Scholar] [CrossRef]
- Nässelqvist, M.; Gustavsson, R.; Aidanpää, J.-O. Experimental and Numerical Simulation of Unbalance Response in Vertical Test Rig with Tilting-Pad Bearings. Int. J. Rotating Mach. 2014, 2014, 309767. [Google Scholar] [CrossRef]
- Childs, D.W.; Carter, C.R. Rotordynamic Characteristics of a Five Pad, Rocker-Pivot, Tilting Pad Bearing in a Load-on-Pad Configuration; Comparisons to Predictions and Load-Between-Pad Results. J. Eng. Gas Turbines Power 2011, 133, 082503. [Google Scholar] [CrossRef]
- Tschoepe, D.P.; Childs, D.W. Measurements Versus Predictions for the Static and Dynamic Characteristics of a Four-Pad, Rocker-Pivot, Tilting-Pad Journal Bearing. J. Eng. Gas Turbines Power 2014, 136, 052501. [Google Scholar] [CrossRef] [Green Version]
- Synnegård, E.; Gustavsson, R.; Aidanpää, J.-O. Forced response of a vertical rotor with tilting pad bearings. In Proceedings of the 16th International Symposium on Transport Phenomena and Dynamics of Rotating Machinery, Honolulu, HI, USA, 10–15 April 2016.
- Benti, G.B.; Rondon, D.; Gustavsson, R.; Aidanpää, J.-O. Numerical and Experimental Study on the Dynamic Bearing Properties of a Four-Pad and Eight-Pad Tilting Pad Journal Bearings in a Vertical Rotor. J. Energy Resour. Technol. 2021, 144, 011304. [Google Scholar] [CrossRef]
- Nässelqvist, M.; Gustavsson, R.; Aidanpää, J.-O. Design of test rig for rotordynamic simulations of vertical ma-chines. In Proceedings of the 14th International Symposium on TransportPhenomena and Dynamics of Rotating Machinery, Honolulu, HI, USA, 27 February–2 March 2012. [Google Scholar]
- Rotordynamic Seal Research. Available online: https://www.rda.guru/ (accessed on 23 May 2022).
- Lin, J.G. Modeling test responses by multivariable polynomials of higher degrrees. SIAM J. Sci. Comput. 2006, 28, 832–867. [Google Scholar] [CrossRef]
- Allaire, P.E.; Nicholas, J.C.; Gunter, E.J. Systems of Finite Elements for Finite Bearings. J. Lubr. Technol. 1977, 99, 187–194. [Google Scholar] [CrossRef]
- Booker, J.F.; Huebner, K.H. Application of Finite Element Methods to Lubrication: An Engineering Approach. J. Lubr. Technol. 1972, 94, 313–323. [Google Scholar] [CrossRef]
- Qiu, Z.L. A Theoretical and Experimental Study on Dynamic Characteristics of Journal Bearings. Ph.D. Dissertation, University of Wollongong, Wollongong, Australia, 1994. [Google Scholar]









| Descriptions | Values |
|---|---|
| Rotor diameter (mm) | 49.84 |
| Rotor length (mm) | 500 |
| Disk diameter (mm) | 100 |
| Disk thickness (mm) | 168 |
| Direction of rotation | Counterclockwise |
| The stiffness of the bracket (MN/m) | 500 |
| Rotor mass (kg) | 24.74 |
| Descriptions | Values | |
|---|---|---|
| Bearing Geometry | Number of pads | 4 |
| Journal diameter (mm) | 49.84 | |
| Pad length (mm) | 20 | |
| Pad angle (degree) | 72 | |
| Angular pivot position (degree) | 0°, 90°, 180°, and 270° | |
| Radial bearing clearance (mm) | 0.13 | |
| Radial pad clearance (mm) | 0.159 | |
| Pad pivot offset ratio (-) | 0.6 | |
| Preload ratio (-) | 0.18 | |
| Pad thickness (mm) | 8 | |
| Material | Bearing surface material (Babbitt) | |
| Thickness (mm) | 1 | |
| Density (kg/m3) | 7280 | |
| Base pad material (Steel) | ||
| Thickness (mm) | 7 | |
| Density (kg/m3) | 7850 | |
| Lubricant | Q6 Handel oil | |
| Oil supply pressure (MPa) | 0.01 | |
| Average inlet and outlet lubrication temperature (°C) | See Figure 4 | |
| Viscosity at 40 °C (mPa·s) | 27.64 | |
| Viscosity at 100 °C (mPa·s) | 6.493 | |
| Density (kg/m3) | 872 |
| Rotor Spin Speed (RPM) | Temperature (°C) | |||
|---|---|---|---|---|
| Pad 1 | Pad 2 | Pad 3 | Pad 4 | |
| 250 | 26.11 | 25.91 | 25.75 | 26.05 |
| 500 | 26.32 | 25.87 | 25.55 | 26.1 |
| 1000 | 27.88 | 26.76 | 26.18 | 27.18 |
| 1500 | 29.53 | 27.58 | 26.89 | 28.35 |
| 2000 | 31.23 | 28.47 | 27.39 | 29.26 |
| 2500 | 34.28 | 30.32 | 29.16 | 31.73 |
| RPM | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| 500 | 750 | 1000 | 1250 | 1500 | 1750 | 2000 | 2250 | 2500 | ||
| 1.7 × 10−3 | 18.2 | 13 | 48 | 5.5 | 18.5 | 23.9 | 26.2 | 28.7 | 28.7 | |
| 3.8 × 10−3 | 6.9 | 24 | 23.3 | 6 | 7.4 | 8.3 | 7.8 | 8.3 | 9 | |
| 5.9 × 10−3 | 10.2 | 14.6 | 7.6 | 8.6 | 8.2 | 4.5 | 4.4 | 4.4 | 1.6 | |
| 1.7 × 10−3 | 20.8 | 30.7 | 38.2 | 20.5 | 30 | 31.7 | 32.6 | 35.5 | 36.7 | |
| 3.8 × 10−3 | 29.9 | 32.7 | 23.5 | 18 | 18.7 | 17.2 | 17 | 15.2 | 18 | |
| 5.9 × 10−3 | 29.9 | 23.2 | 1.8 | 9.4 | 11.6 | 10.3 | 11.3 | 9.2 | 9.6 | |
| 1.7 × 10−3 | 35.6 | 31.8 | 54.1 | 11.9 | 14.4 | 19 | 22.6 | 26.9 | 33.5 | |
| 3.8 × 10−3 | 17.5 | 20.5 | 38.9 | 0.9 | 9.1 | 10.9 | 14.3 | 21.1 | 22.3 | |
| 5.9 × 10−3 | 15.2 | 23.2 | 16.8 | 0.1 | 5.2 | 5.8 | 11.4 | 16.6 | 13.5 | |
| 1.7 × 10−3 | 39.4 | 21.7 | 35.8 | 0.1 | 14.3 | 21.1 | 20.9 | 25.8 | 29.5 | |
| 3.8 × 10−3 | 13.4 | 13.1 | 14.3 | 6.3 | 12 | 13 | 10.9 | 16.9 | 15.5 | |
| 5.9 × 10−3 | 10 | 17.4 | 5.9 | 1.8 | 8.8 | 10.9 | 11.2 | 16.2 | 10.6 | |
| Mesh (Ne × Me) | Computational Time [sec] | Relative Eccentricity [-] | Force [N] |
|---|---|---|---|
| 6 × 4 | 3.31 | 73.91 | 69.08 |
| 8 × 6 | 5.43 | 63.05 | 75.75 |
| 14 × 9 | 10.65 | 59.05 | 79.96 |
| 18 × 12 | 19.08 | 58.86 | 81.34 |
| 27 × 18 | 40.75 | 58.69 | 82.95 |
| 36 × 24 | 91.37 | 59.01 | 83.36 |
| 54 × 36 | 297.92 | 59.17 | 84.06 |
| 90 × 60 | 2000.10 | 59.34 | 84.63 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Benti, G.B.; Gustavsson, R.; Aidanpää, J.-O. Speed-Dependent Bearing Models for Dynamic Simulations of Vertical Rotors. Machines 2022, 10, 556. https://doi.org/10.3390/machines10070556
Benti GB, Gustavsson R, Aidanpää J-O. Speed-Dependent Bearing Models for Dynamic Simulations of Vertical Rotors. Machines. 2022; 10(7):556. https://doi.org/10.3390/machines10070556
Chicago/Turabian StyleBenti, Gudeta Berhanu, Rolf Gustavsson, and Jan-Olov Aidanpää. 2022. "Speed-Dependent Bearing Models for Dynamic Simulations of Vertical Rotors" Machines 10, no. 7: 556. https://doi.org/10.3390/machines10070556
APA StyleBenti, G. B., Gustavsson, R., & Aidanpää, J.-O. (2022). Speed-Dependent Bearing Models for Dynamic Simulations of Vertical Rotors. Machines, 10(7), 556. https://doi.org/10.3390/machines10070556