
Reducing Helicopter Vibration Loads by Individual Blade Control with Genetic Algorithm


Abstract
:1. Introduction
2. Calculation Method
2.1. Rotor Blade Airfoil Aerodynamics
2.2. Response Solution
2.3. Hub Loads
3. Case Study
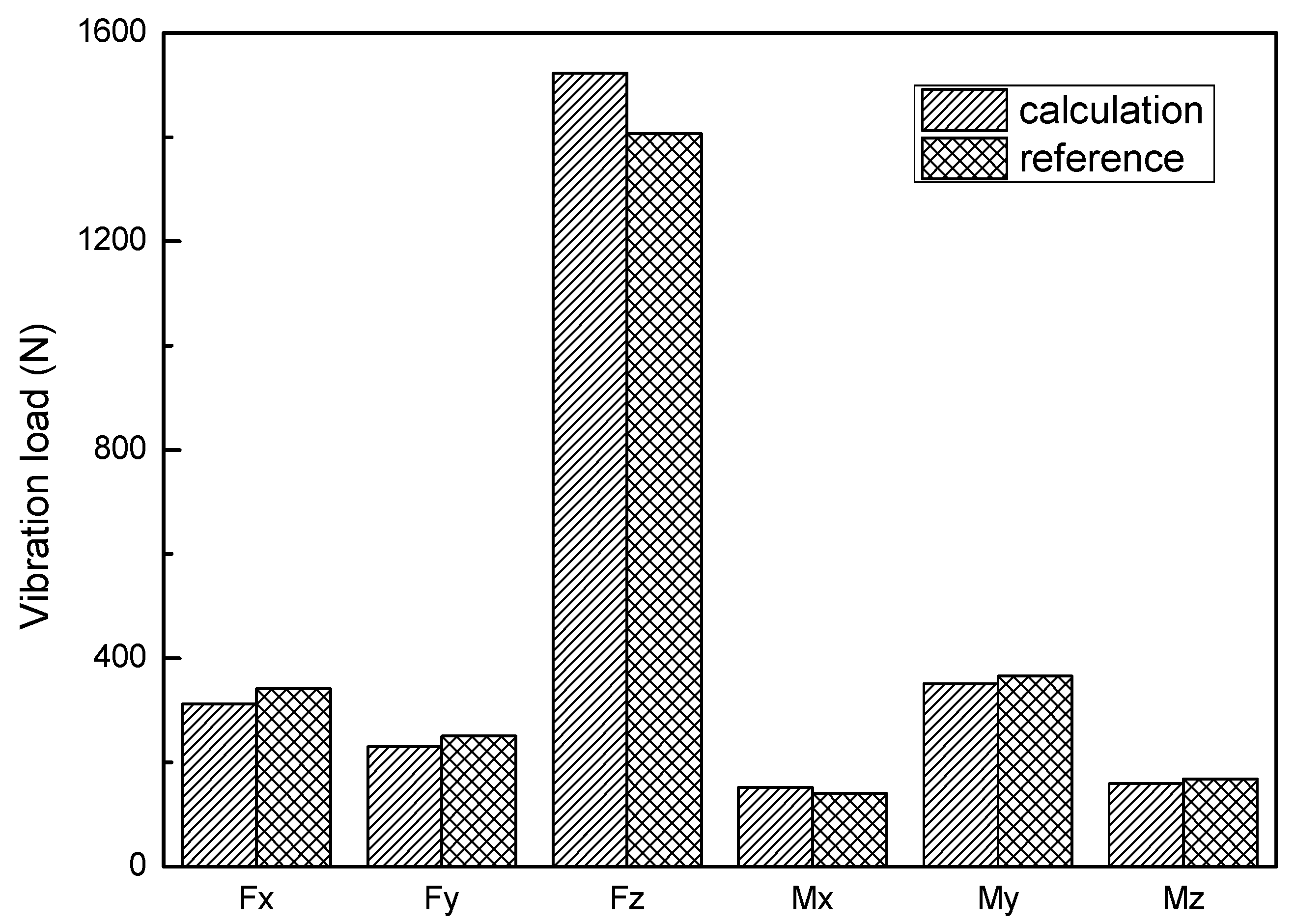
3.1. Model Validation
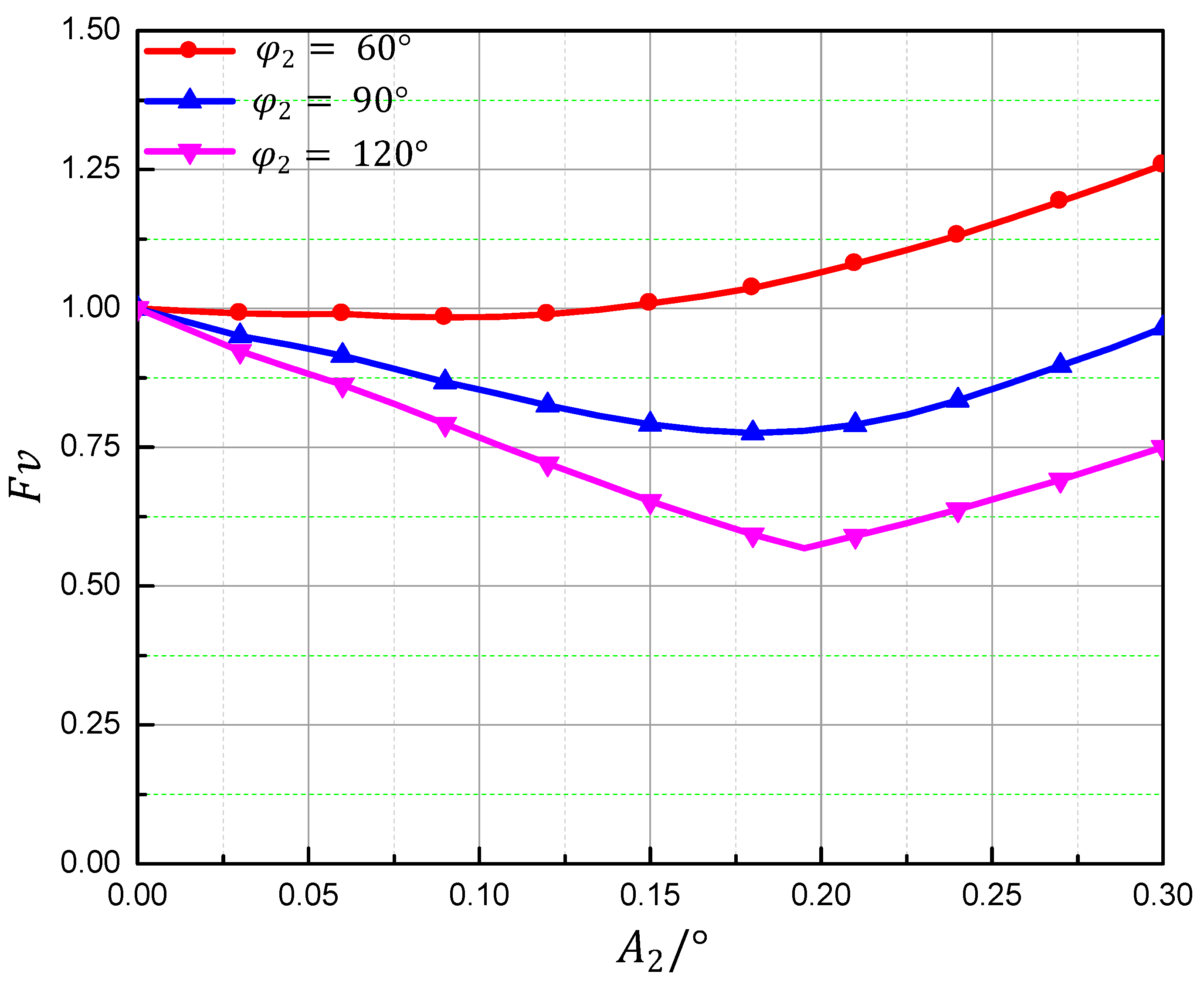
3.2. Influence of Harmonic Phases and Amplitudes
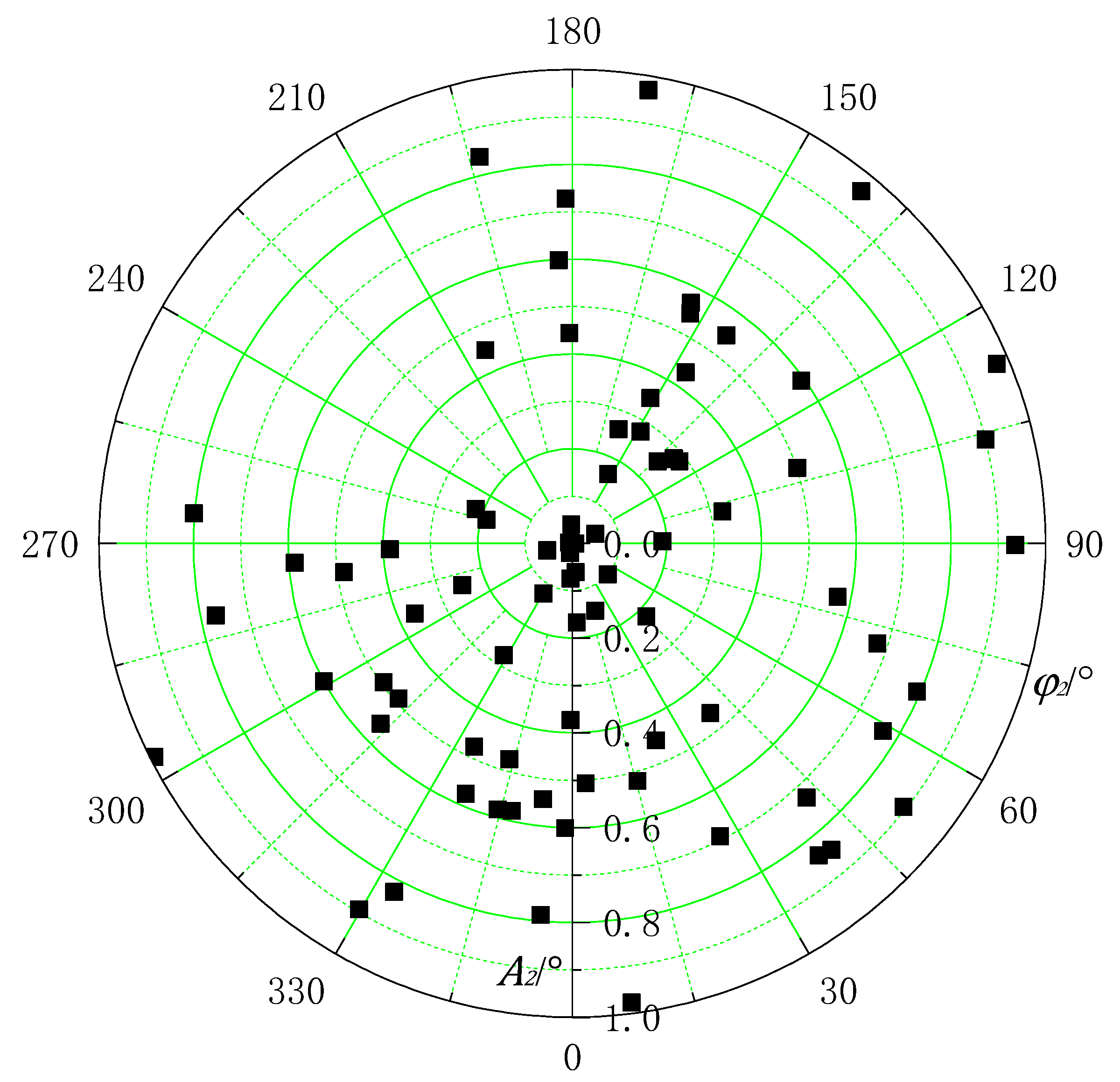
3.3. Optimal States
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ellis, C.W.; Jones, R. Application of an absorber to reduce helicopter vibration levels. J. Am. Helicopter Soc. 1963, 8, 30–42. [Google Scholar] [CrossRef]
- Lu, Y. Research on Electronically Controlled Rotor System. Ph.D. Thesis, Nanjing University of Aeronautics and Astronautics, Nanjing, China, 2004. [Google Scholar]
- Cesnik, C.E.S.; Shin, S.J.; Wilbur, M.L. Dynamic response of active twist rotor blades. Smart Mater. Struct. 2001, 10, 62–76. [Google Scholar] [CrossRef]
- Welsh, W.; Fredrickson, C.; Rauch, C.; Lyndon, I. Flight test of an active vibration control system on theUH-60 black hawk helicopter. In Proceedings of the 51th Annual Forum of the American Helicopter Society, Fort Worth, TX, USA, 8–11 May1995. [Google Scholar]
- Miao, W.; Kottapalli, S.B.R.; Frye, H.M. Flight demonstration of higher harmonic control (HHC) on S-76. In Proceedings of the 39th Annual Forum of the American Helicopter Society, Washington, DC, USA, 9–11 May 1983. [Google Scholar]
- Ham, N.D. A simple system for helicopter individual-blade control and its application to gust alleviation. In Proceedings of the 16th European Rotorcraft Forum, Bristol, UK, 18–21 September 1990. [Google Scholar]
- Ham, N.D. Helicopter individual-blade-control: Promising technology for the future helicopter. In Proceedings of the 21th European Rotorcraft Forum, Saint Petersburg, Russia, 30 August–1 September 1995. [Google Scholar]
- Jacklin, S.A.; Haber, A.; Simone, G.; De Norman, T.R.; Kitaplioglu, C.; Shinoda, P. Full-scale wind tunnel test of an individual blade control system for a UH-60 helicopter. In Proceedings of the 58th Annual Forumof American Helicopter Society, Montréal, QC, Canada, 11–13 June 2002. [Google Scholar]
- Fuerst, D.; Hausberg, A. Experimental verification of an Electro-Mechanical-Actuatorfor a swashplateless primary and individual helicopter blade control system. In Proceedings of the 64th Annual Forum of American Helicopter Society, Montréal, QC, Canada, 29 April–1 May 2008. [Google Scholar]
- Kuefmann, P.; Bartels, R.; van der Wall, B.G. The first wind-tunnel test of the DLR’s multiple swashplate system: Test procedure and preliminary results. In Proceedings of the 72nd Annual Forum of the American Helicopter Society, West Palm Beach, FL, USA, 17–19 May 2016. [Google Scholar]
- Ma, Y.J.; Yun, W.X. Research progress of genetic algorithm. Appl. Res. Comput. 2012, 29, 1201–1210. [Google Scholar]
- Ullah, Z.; khan, M.; Raza Naqvi, S.; Farooq, W.; Yang, H.; Wang, S.; Vo, D.V.N. A comparative study of machine learning methods for bio-oil yield prediction—A genetic algorithm-based features selection. Bioresour. Technol. 2021, 335, 125292. [Google Scholar] [CrossRef] [PubMed]
- Naranjo-Pérez, J.; Jiménez-Manfredi, J.; Jiménez-Alonso, J.; Sáez, A. Motion-based design of passive damping devices to mitigate wind-induced vibrations in stay cables. Vibration 2018, 1, 269–289. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Y.; He, L.; Yang, J.; Zhu, G.; Jia, X.; Yan, W. Multi-objective optimization design of a novel integral squeeze film bearing damper. Machines 2021, 9, 206. [Google Scholar] [CrossRef]
- Liu, Q.; Zha, Y.; Liu, T.; Lu, C. Research on adaptive control of air-borne bolting rigs based on genetic algorithm optimization. Machines 2021, 9, 240. [Google Scholar] [CrossRef]
- Omar, H.M. Optimal geno-fuzzy lateral control of powered parachute flying vehicles. Aerospace 2021, 8, 400. [Google Scholar] [CrossRef]
- Johnson, W. Helicopter Theory; Dover Publications: New York, NY, USA, 1980; p. 139. [Google Scholar]
- Leishman, J.G.; Beddoes, T.S. A semi-empirical model for dynamic stall. In Proceedings of the 42nd Annual Forum of American Helicopter Society, Washington, DC, USA, 2–4 June 1986. [Google Scholar]
- Bir, G.; Chopra, I. University of Maryland Advanced Rotorcraft Code Theory Manual; Center for Rotorcraft Education and Research University of Maryland: College Park, MD, USA, 1994. [Google Scholar]
- Zhou, J. Simulation and Analysis of Smart Rotor with Dual Trailing-Edge Flaps. Master’s Thesis, Nanjing University of Aeronautics and Astronautics, Nanjing, China, 2015. [Google Scholar]
- Zhou, H. Research on Vibration Suppression and Realization of Smart Rotor based on Dual Trailing-Edge Flaps. Master’s Thesis, Nanjing University of Aeronautics and Astronautics, Nanjing, China, 2020. [Google Scholar]
- Hodges, D.; Dowell, H. Nonlinear Equations of Motion for the Elastic Bending and Torsion of Twisted Nonuniform Rotor Blades; NASA: Washington, DC, USA, 1974. [Google Scholar]
- Huiping, S. An improved mode superposition method for linear damped systems. Commun. Appl. Numer. Methods 1991, 7, 579–580. [Google Scholar] [CrossRef]
- John, M.; Newman, S. Basic Helicopter Aerodynamics, 4th ed.; Wiley-Blackwell: Hoboken, NJ, USA, 2011. [Google Scholar]
- Heffernan, R.; Gaubert, M. Structural and Aerodynamic Loads and Performance Measurements of SA349/2 Helicopter with an Advanced Geometry Rotor; NASA: Washington, DC, USA, 1986; pp. 15–103. [Google Scholar]
- Heffernan, R.M.; Yamauchi, G.K.; Gaubert, M.; Johnson, W. Hub Loads Analysis of the SA349/2 Helicopter; NASA: Washington, DC, USA, 1988. [Google Scholar]
- Liu, Q.; Hu, G.; Lei, W. Parameter identification and application of rotor airfoil dynamic stall model. J. Nav. Aeronaut. Astronaut. Univ. 2015, 30, 129–133. [Google Scholar]
- Chen, B.; Liu, W. SAC model based improved genetic algorithm for solving TSP. J. Front. Comput. Sci. Technol. 2021, 15, 1680–1693. [Google Scholar]
- Pan, J.; Qian, Q.; Fu, Y. Multi-population genetic algorithm based on optimal weight dynamic control learning mechanism. J. Front. Comput. Sci. Technol. 2021, 15, 2421–2437. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number of Blades | Radius | Blade Chord | Rotor Rotational Speed | Shaft Angle of Attack | Flap and Lag Hinge Offset |
|---|---|---|---|---|---|
| 3 | 5.25 m | 0.35 m | 40.5 rad/s | −4° | 0.475 m |
| r m | EIf N.kg | EIl N.kg | GJ N.m2 | M kg/m | YG m | r m | EIf N.kg | EIl N.kg | GJ N.m2 | M kg/m | YG m |
|---|---|---|---|---|---|---|---|---|---|---|---|
| 0.445 | 4500 | 1100.0 | 250 | 25 | 0 | 3.59 | 7.95 | 420.5 | 11.1 | 5.02 | −0.0038 |
| 0.475 | 400 | 350.0 | 1000 | 25 | 0 | 3.634 | 7.98 | 414.0 | 11.2 | 6.68 | 0.112 |
| 0.505 | 770 | 490.0 | 1250 | 15 | 0 | 3.754 | 7.98 | 414.0 | 11.2 | 6.58 | 0.112 |
| 0.525 | 9350 | 885.0 | 2200 | 105 | 0 | 4.173 | 7.91 | 399.6 | 11.2 | 7.59 | 0.204 |
| 0.545 | 64 | 320.0 | 2000 | 100 | 0 | 4.35 | 7.85 | 395.6 | 12.8 | 8.36 | 0.237 |
| 0.565 | 66 | 330.0 | 34 | 38.65 | 0 | 4.39 | 8.50 | 477.4 | 12.8 | 8.67 | 0.181 |
| 0.585 | 55.6 | 250.0 | 27.3 | 16.15 | 0 | 4.41 | 7.71 | 482.3 | 12.8 | 8.59 | 0.0183 |
| 0.625 | 51.6 | 186.5 | 21.7 | 8.55 | 0 | 4.44 | 10.04 | 530.8 | 12.8 | 9.64 | 0.0093 |
| 0.665 | 50.7 | 134.5 | 19.3 | 8.15 | 0 | 4.49 | 17.75 | 623.7 | 12.8 | 15.07 | 0.0096 |
| 0.705 | 52.00 | 134.5 | 19.3 | 7.75 | 0 | 4.61 | 17.75 | 623.7 | 12.8 | 14.36 | 0.0133 |
| 0.745 | 52.10 | 96.9 | 21.2 | 10.10 | 0 | 4.623 | 17.75 | 623.7 | 12.8 | 14.92 | 0.0096 |
| 0.795 | 47.00 | 104.5 | 22 | 7.15 | 0 | 4.64 | 21.43 | 820.7 | 19 | 20.16 | −0.0021 |
| 0.815 | 48.50 | 115.4 | 22.1 | 6.80 | −0.0017 | 4.665 | 13.45 | 622.5 | 19 | 21.26 | 0.033 |
| 0.885 | 38.64 | 132.9 | 18 | 6.25 | −0.0021 | 4.705 | 14.49 | 1020.9 | 19 | 21.09 | −0.002 |
| 0.955 | 21.77 | 329.9 | 17.9 | 6.82 | 0.007 | 4.77 | 22.60 | 1288.6 | 19 | 17.74 | −0.0172 |
| 1.025 | 10.21 | 555.2 | 8.2 | 6.73 | −0.0148 | 4.8 | 23.53 | 2301.2 | 25.7 | 19.60 | −0.0215 |
| 1.165 | 10.31 | 552.8 | 8.2 | 8.50 | −0.314 | 4.855 | 7.57 | 730.4 | 9.9 | 6.11 | 0.0054 |
| 1.235 | 7.72 | 646.1 | 6.8 | 8.22 | −0.175 | 4.875 | 7.80 | 791.7 | 9.9 | 11.55 | 0.0026 |
| 1.305 | 6.49 | 703.3 | 7.9 | 7.73 | −0.189 | 4.89 | 8.20 | 995.3 | 6.6 | 5.33 | −0.0188 |
| 1.375 | 5.92 | 585.0 | 8.8 | 6.99 | −0.144 | 4.95 | 8.20 | 995.3 | 6.6 | 5.48 | −0.016 |
| 1.515 | 7.81 | 560.4 | 9.8 | 6.95 | −0.0067 | 4.99 | 8.50 | 998.7 | 6.6 | 6.05 | −0.015 |
| 1.605 | 7.71 | 447.5 | 10.6 | 6.51 | 0.0052 | 5.03 | 8.19 | 966.0 | 5.1 | 4.20 | −0.0141 |
| 1.635 | 7.61 | 406.2 | 11.1 | 6.41 | 0.0102 | 5.07 | 6.46 | 809.5 | 4.9 | 3.84 | −0.088 |
| 3.276 | 7.61 | 406.2 | 11.1 | 6.67 | 0.0102 | 5.15 | 6.46 | 809.5 | 4.9 | 3.69 | −0.125 |
| 3.396 | 7.58 | 413.2 | 11.1 | 4.90 | −0.0056 | 5.25 | 6.46 | 809.5 | 4.9 | 3.69 | −0.125 |
| Mode | Calculation/Ω | Reference/Ω |
|---|---|---|
| 1st flap | 1.03 | 1.03 |
| 2nd flap | 2.90 | 2.81 |
| 3rd flap | 5.32 | 5.24 |
| 1st lag | 0.54 | 0.58 |
| 2nd lag | 4.56 | 4.76 |
| 1st torsion | 3.47 | 4.13 |
| 2nd torsion | 11.26 | 12.81 |
| Parameter | Value |
|---|---|
| Number of chromosomes | 22 |
| Population size | 80 |
| Number of interactions | 100 |
| Crossover probability | 0.8 |
| Mutatin probability | 0.1 |
| selection rate | 0.5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, R.; Gao, Y.; Wang, H.; Ni, X. Reducing Helicopter Vibration Loads by Individual Blade Control with Genetic Algorithm. Machines 2022, 10, 479. https://doi.org/10.3390/machines10060479
Yang R, Gao Y, Wang H, Ni X. Reducing Helicopter Vibration Loads by Individual Blade Control with Genetic Algorithm. Machines. 2022; 10(6):479. https://doi.org/10.3390/machines10060479
Chicago/Turabian StyleYang, Renguo, Yadong Gao, Huaming Wang, and Xianping Ni. 2022. "Reducing Helicopter Vibration Loads by Individual Blade Control with Genetic Algorithm" Machines 10, no. 6: 479. https://doi.org/10.3390/machines10060479
APA StyleYang, R., Gao, Y., Wang, H., & Ni, X. (2022). Reducing Helicopter Vibration Loads by Individual Blade Control with Genetic Algorithm. Machines, 10(6), 479. https://doi.org/10.3390/machines10060479