
Automatic Shift Control of an Electric Motor Direct Drive for an Electric Loader

Abstract
:1. Introduction
2. System Configuration and Shift System
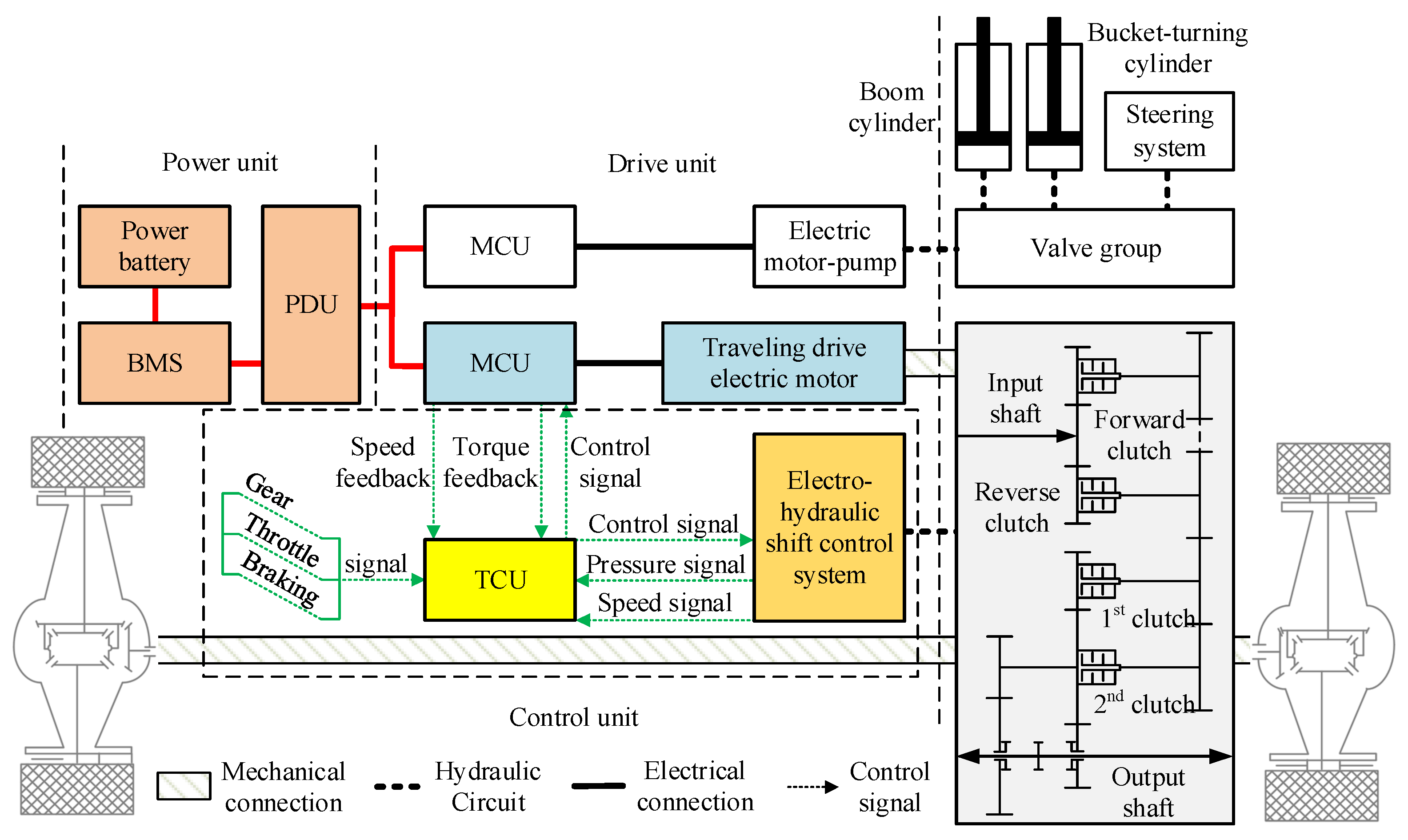
2.1. System Configuration
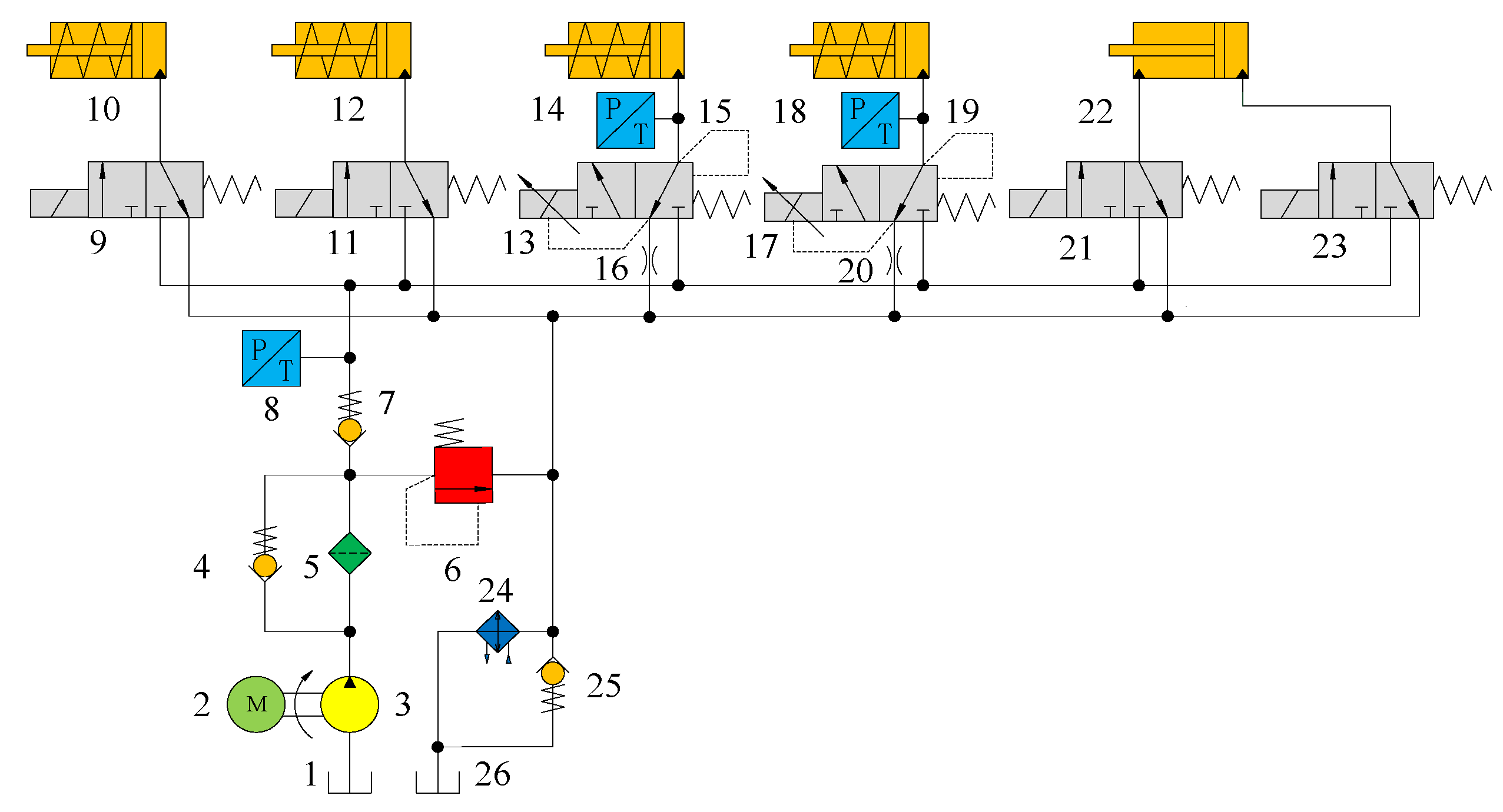
2.2. Shift System
3. Analysis of Automatic Shift Rule
3.1. Optimal Power Shift Rule
- (1)
- (2)
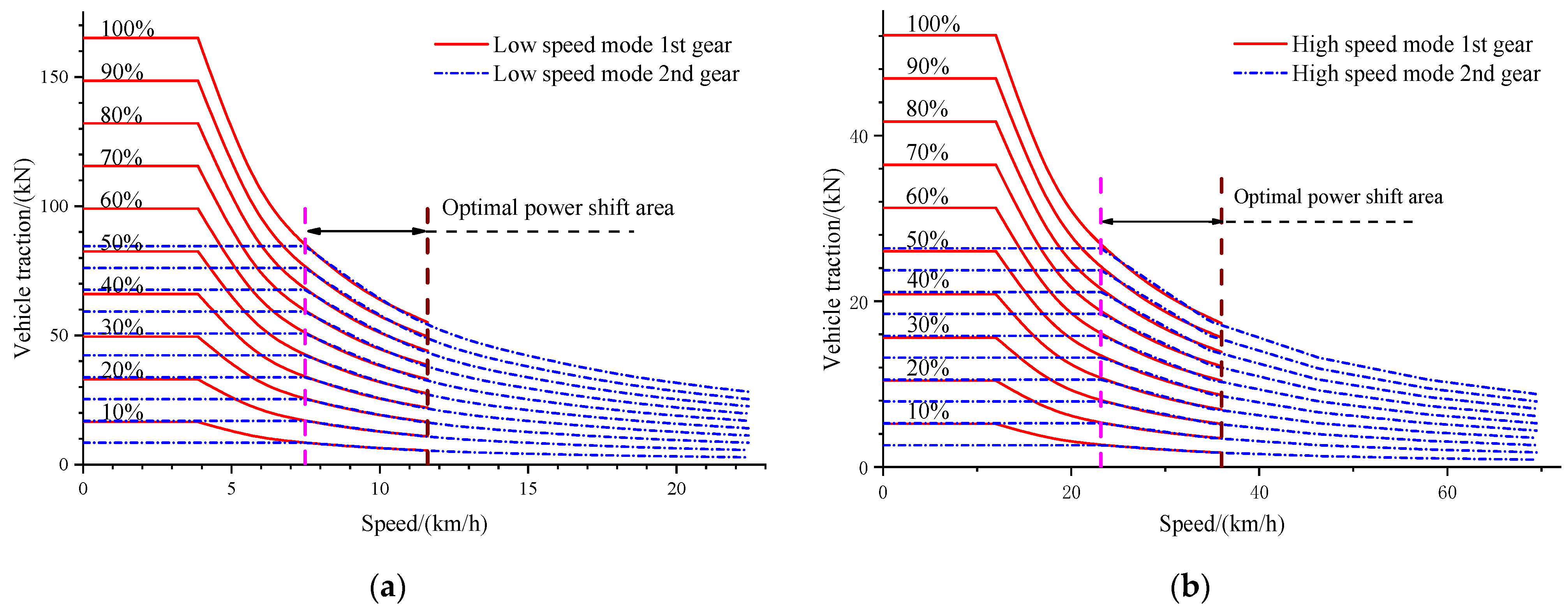
- As seen in Figure 3, the driving force characteristic curve of the machine under different gears (Table 1) can be obtained. The intersection of two adjacent gears is taken as the shift point set. The shift point set under each accelerator pedal opening can form a rectangular optimal power shift area, as shown in Figure 4.
- (3)
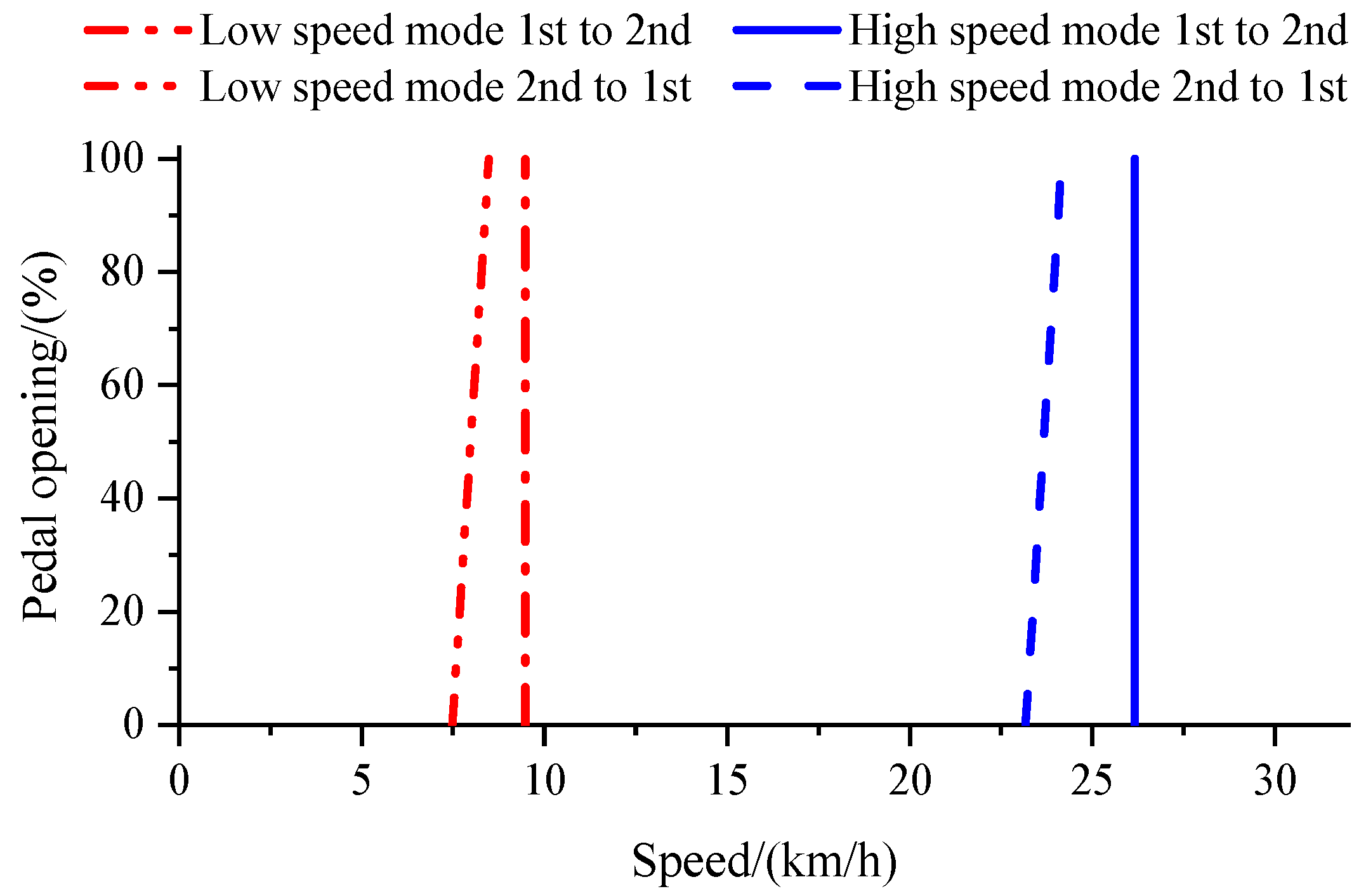
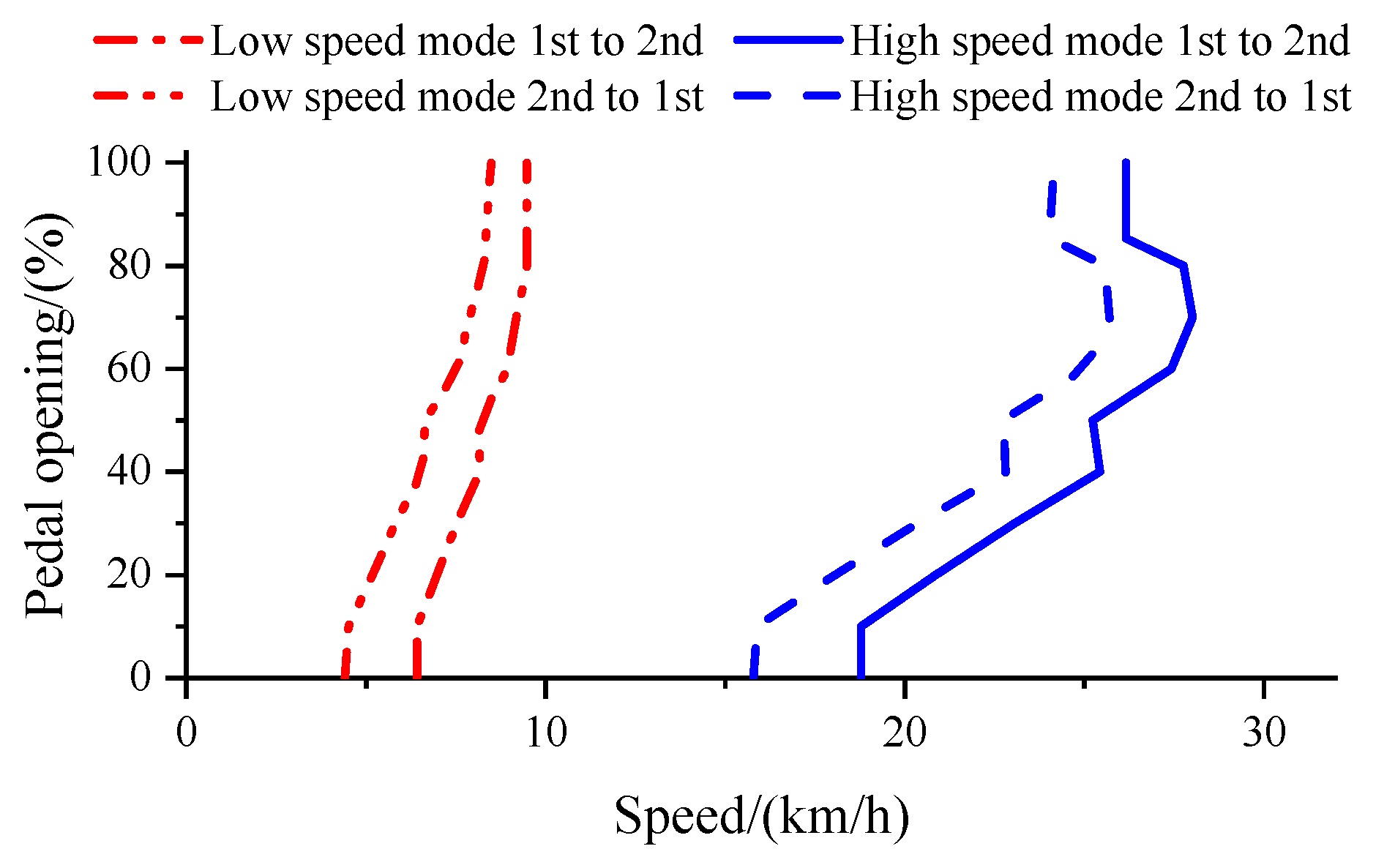
- According to the analysis above, in the optimal power shift area, two straight perpendicular lines are arbitrarily selected for the speed axis. The intersection of the straight line and the traction curve of the whole machine are connected. The best dynamic curve can then be obtained. In addition, when formulating the downshift rule, in order to avoid cyclic shift, the downshift curve is usually reduced by 2~8 km/h on the basis of the upshift curve. Due to the low overall speed of construction machinery, the downshift curve in low-speed mode is taken to reduce 2 km/h compared to the upshift curve, and then 3 km/h in high-speed mode. As a result, the optimal power rule curve can then be obtained, as seen in Figure 5.
3.2. Optimal Economic Shift Rule
- (1)
- (2)
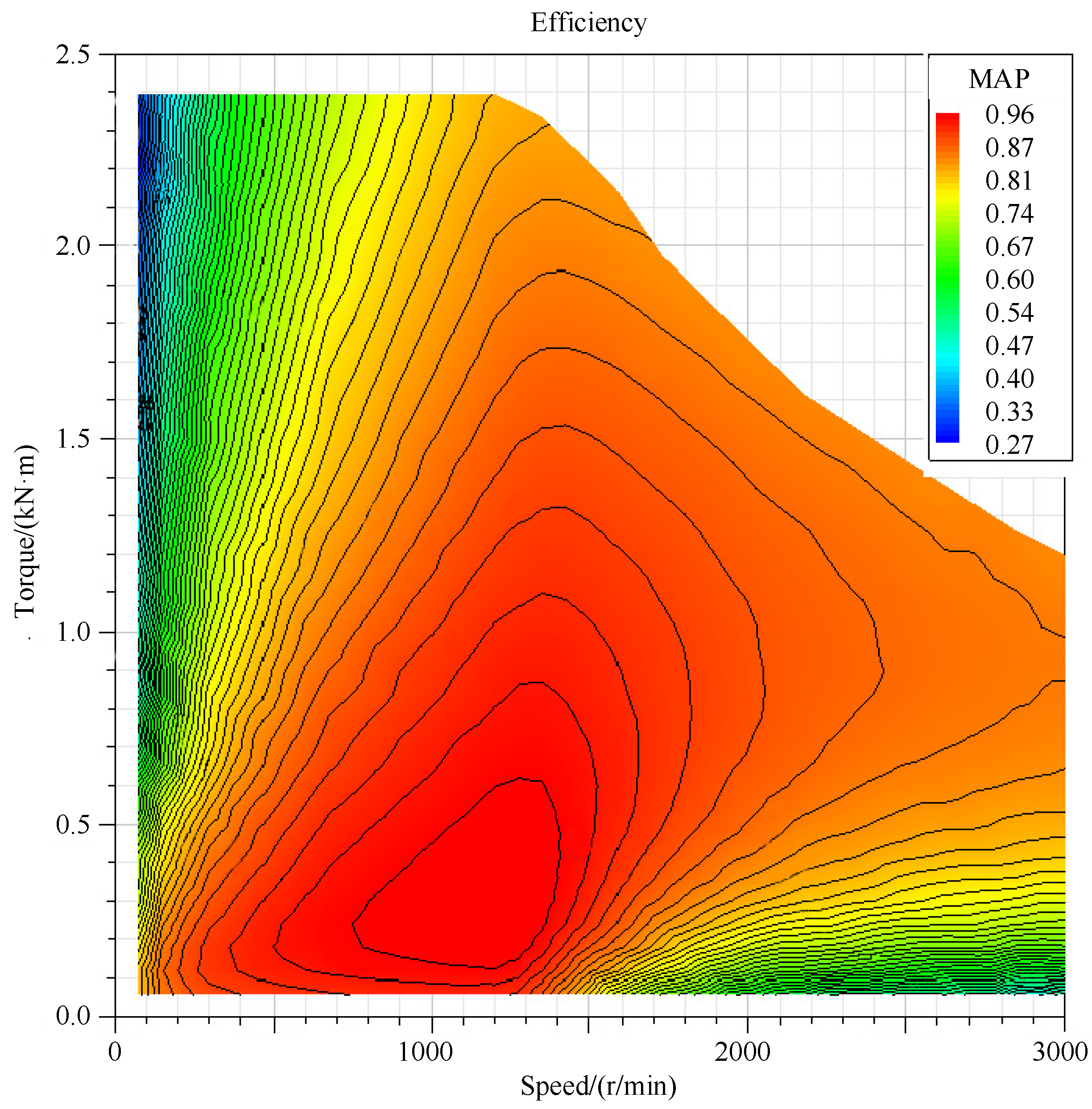
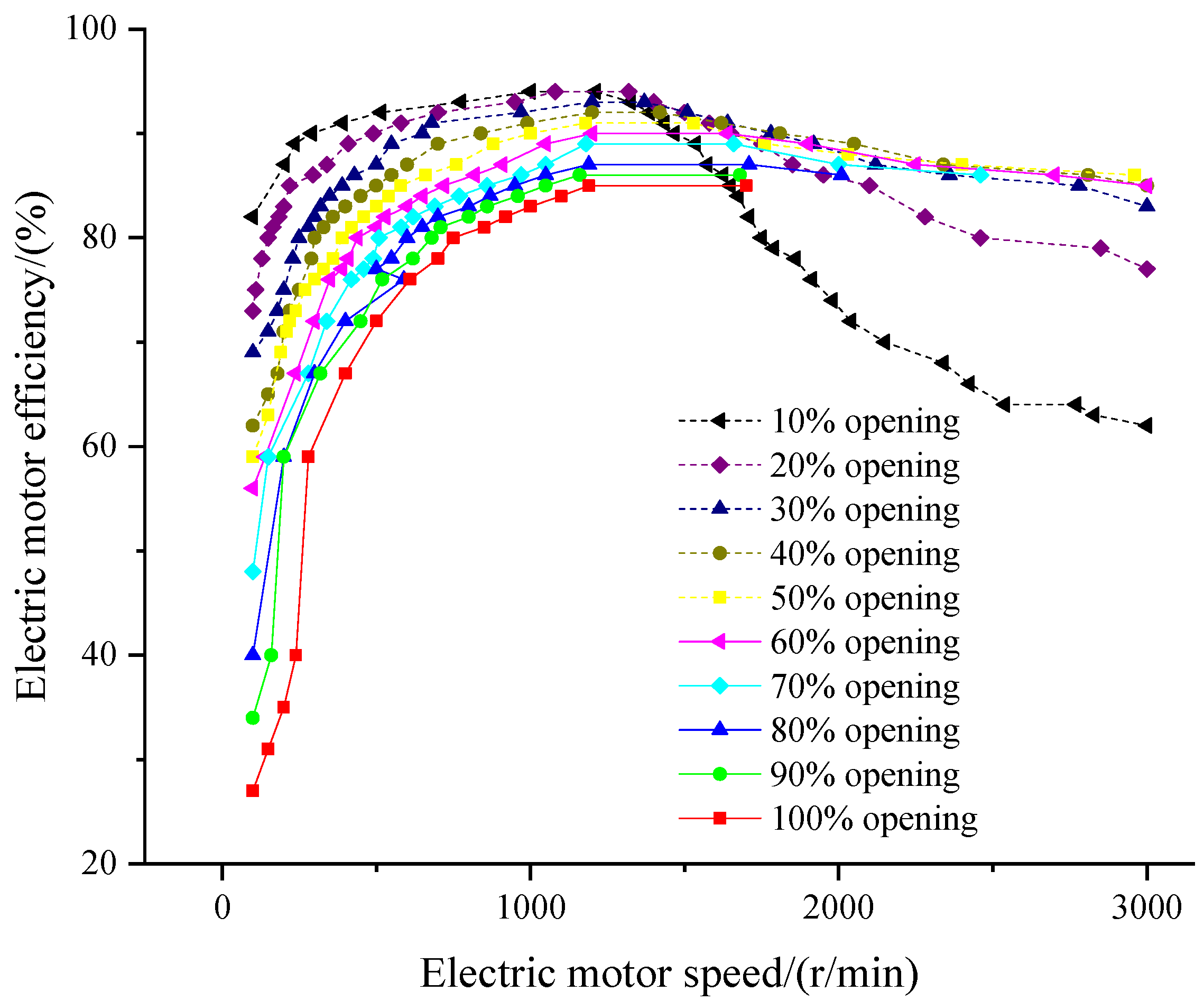
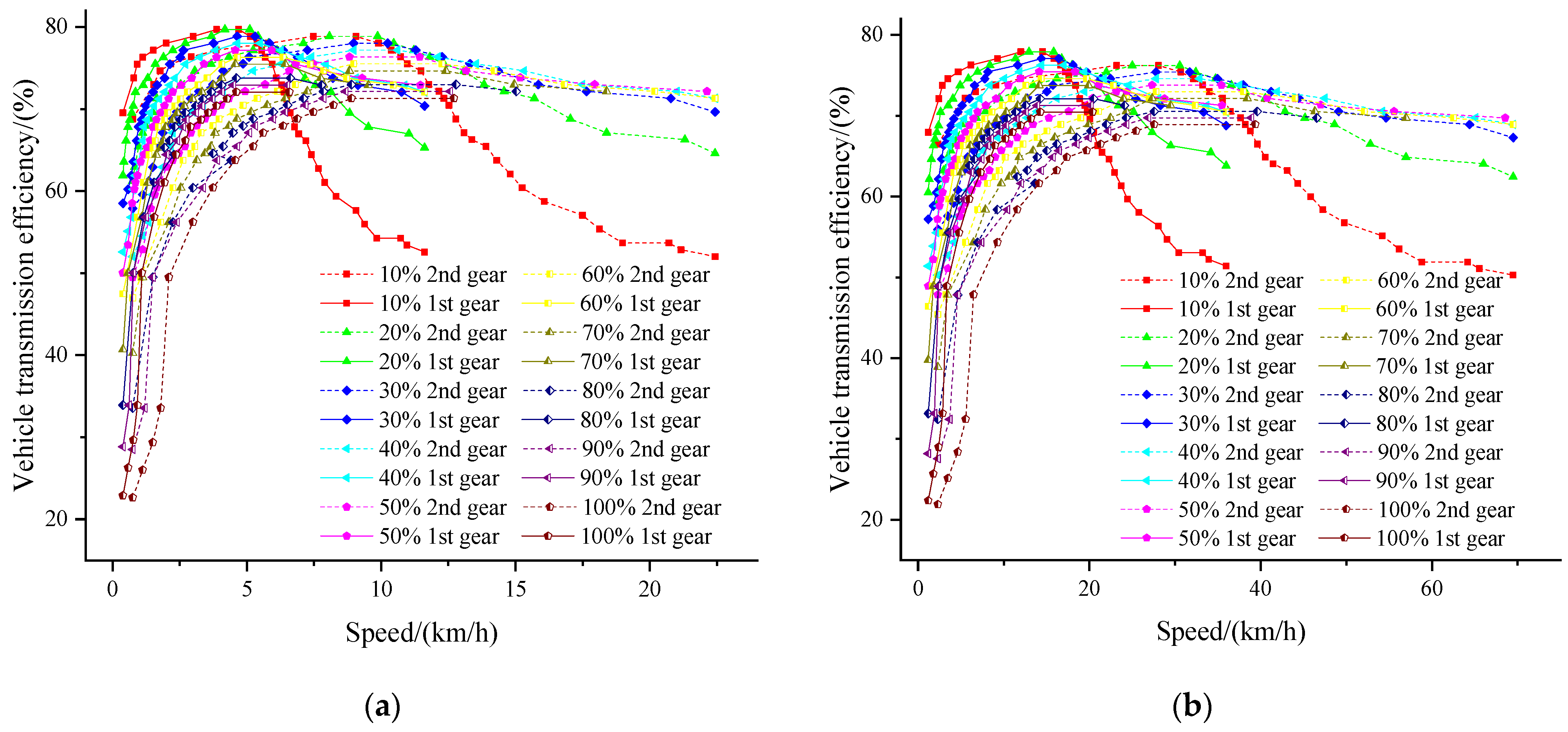
- As shown in Figure 7, the machine speed efficiency characteristic curve under different gears can be obtained, the result of which is shown in Figure 8. If the efficiency curves of two adjacent gears intersect, the intersection point shall be taken as the shift point. If the efficiency curves of two adjacent gears do not intersect, the highest speed point of the efficiency curve of the lower gear shall be taken as the shift point.
- (3)
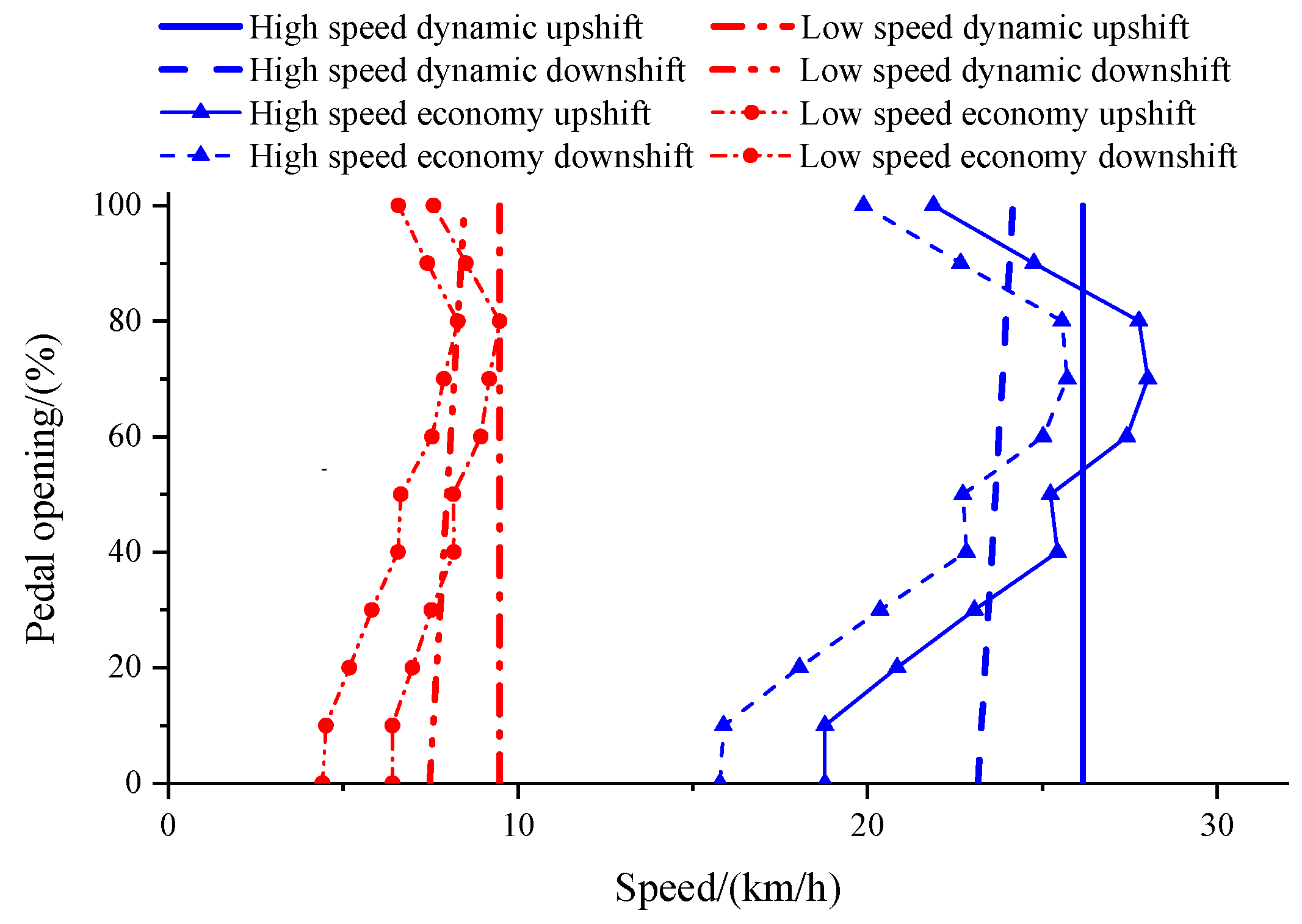
- According to the above results, the shift points corresponding to the 10%, 20%,…, 100% accelerator pedal opening are connected in turn to form the optimal economic shift rule curve. Similarly, in order to avoid cyclic shift, when formulating the downshift curve, refer to the rule of the optimal power downshift rule. The downshift curve is usually reduced by 2~8 km/h on the basis of the upshift curve. The downshift and upshift curves with the optimal economic shift rule can be obtained by taking the shift curve as the center and translating 1~4 km/h to both sides, respectively. Due to the low overall speed of construction machinery, the downshift curve in low-speed mode is taken to reduce 2 km/h compared to the upshift curve, and 3 km/h in high-speed mode. As a result, the optimal economic shift rule curve is revealed, as seen in Figure 9.
4. Comprehensive Shift Control Strategy
- (1)
- The power shift area is obtained according to the design method of the optimal power shift rule. The economic rule curve is obtained according to the design method of the optimal economic shift rule, as shown in Figure 10.
- (2)
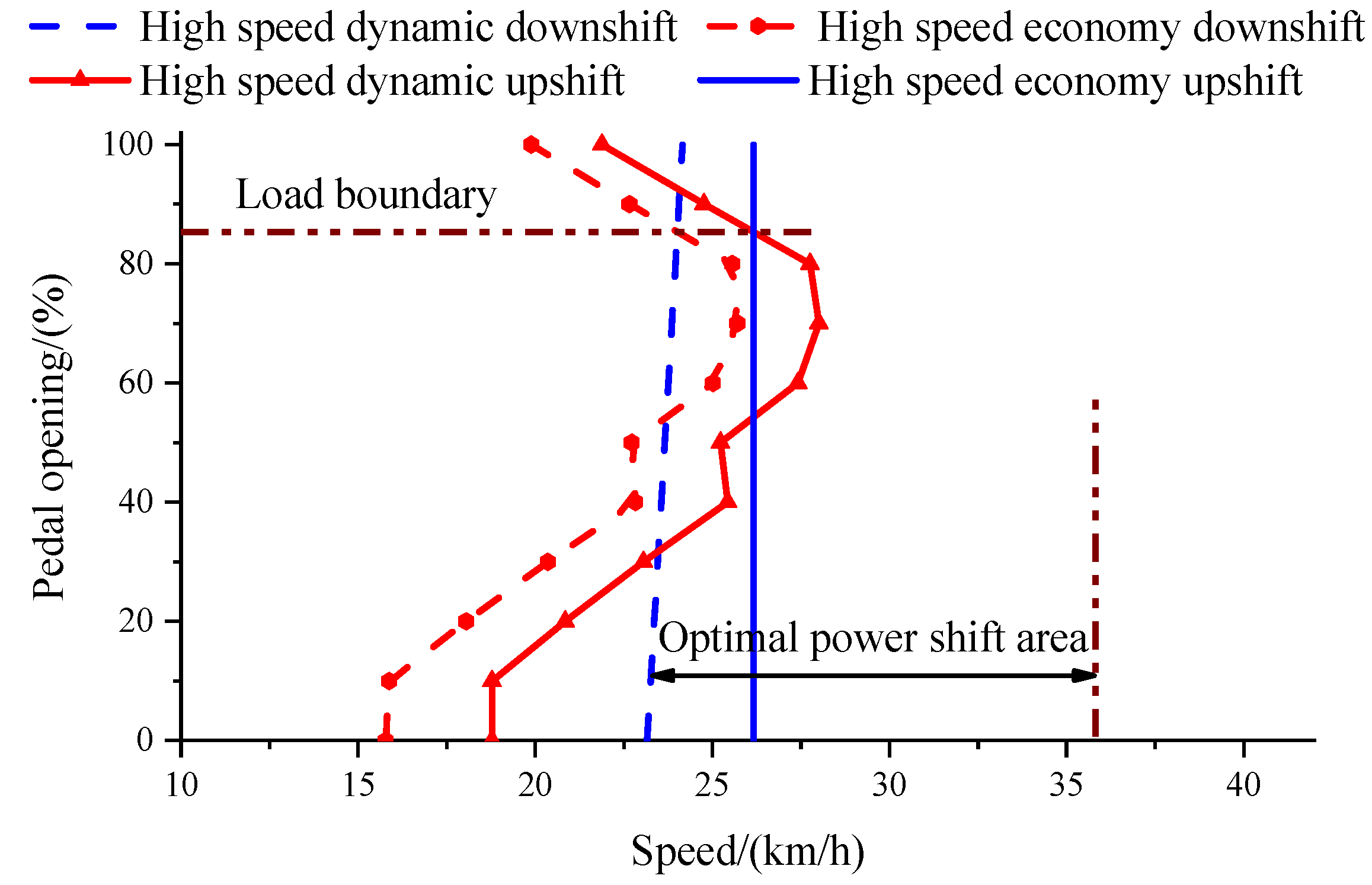
- According to the obtained power shift area and the economic rule curve, the overlapping between them can be obtained. If the economic shift curve overlaps with the power shift area, the highest load point of the overlapping part is taken as the dividing point between power and economy. The optimal economic shift rule is adopted in the area below the load value corresponding to the dividing point, and the optimal power shift rule is adopted in the area above the load value corresponding to the dividing point. As shown in Figure 11, the analysis diagram of the comprehensive shift rule of high-speed mode is the same as that of the low-speed mode, which will not be repeated here.
- (3)
- If there is no overlap between the optimal economic shift curve and the optimal power shift area, the point where the economic shift curve is nearest to the power shift area is taken as the dividing point. The optimal economic shift rule is adopted in the area below the load value corresponding to this point, and the optimal power shift rule is adopted in the area above the load value corresponding to the dividing point. The developed comprehensive shift rule curve is shown in Figure 12.
5. Simulation Research on Automatic Transmission System of Loader
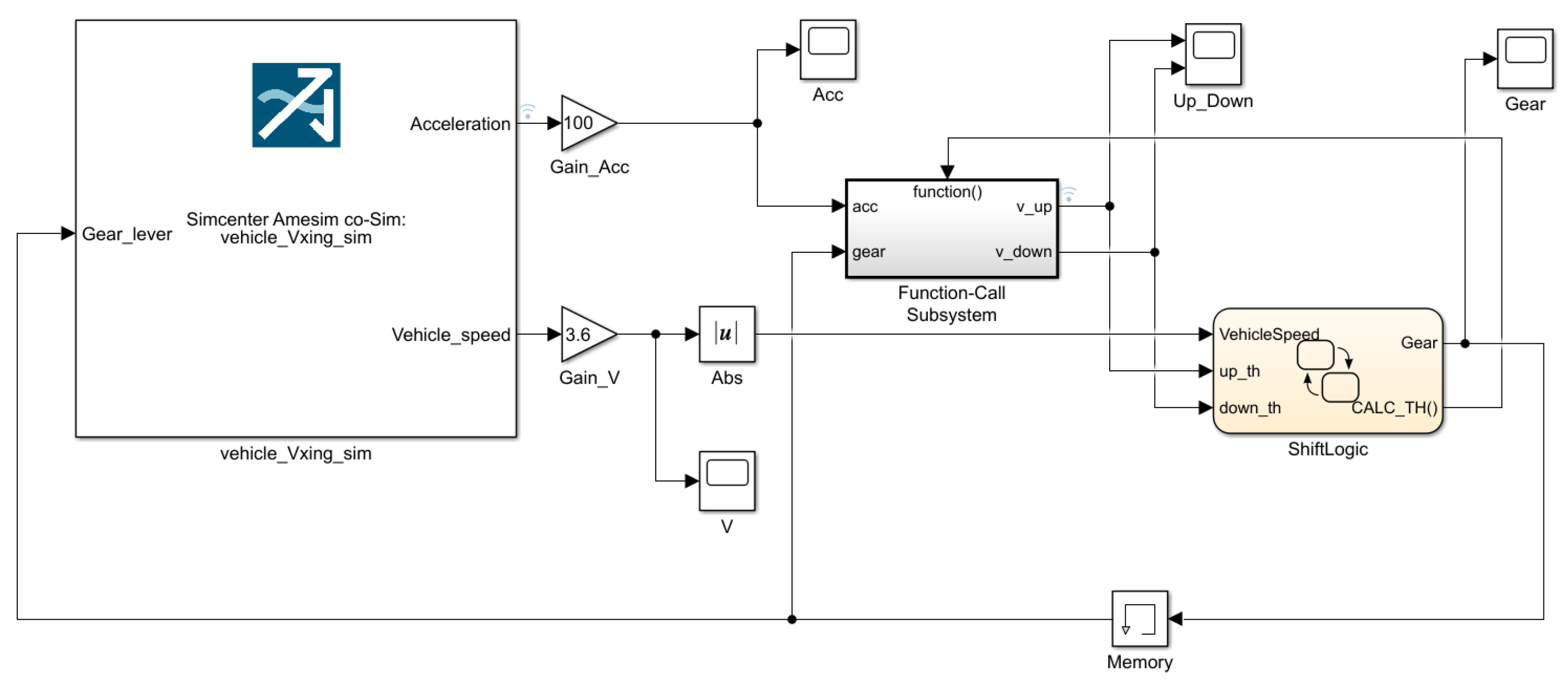
5.1. Machine Model
5.2. Automatic Shift Rule Control Model
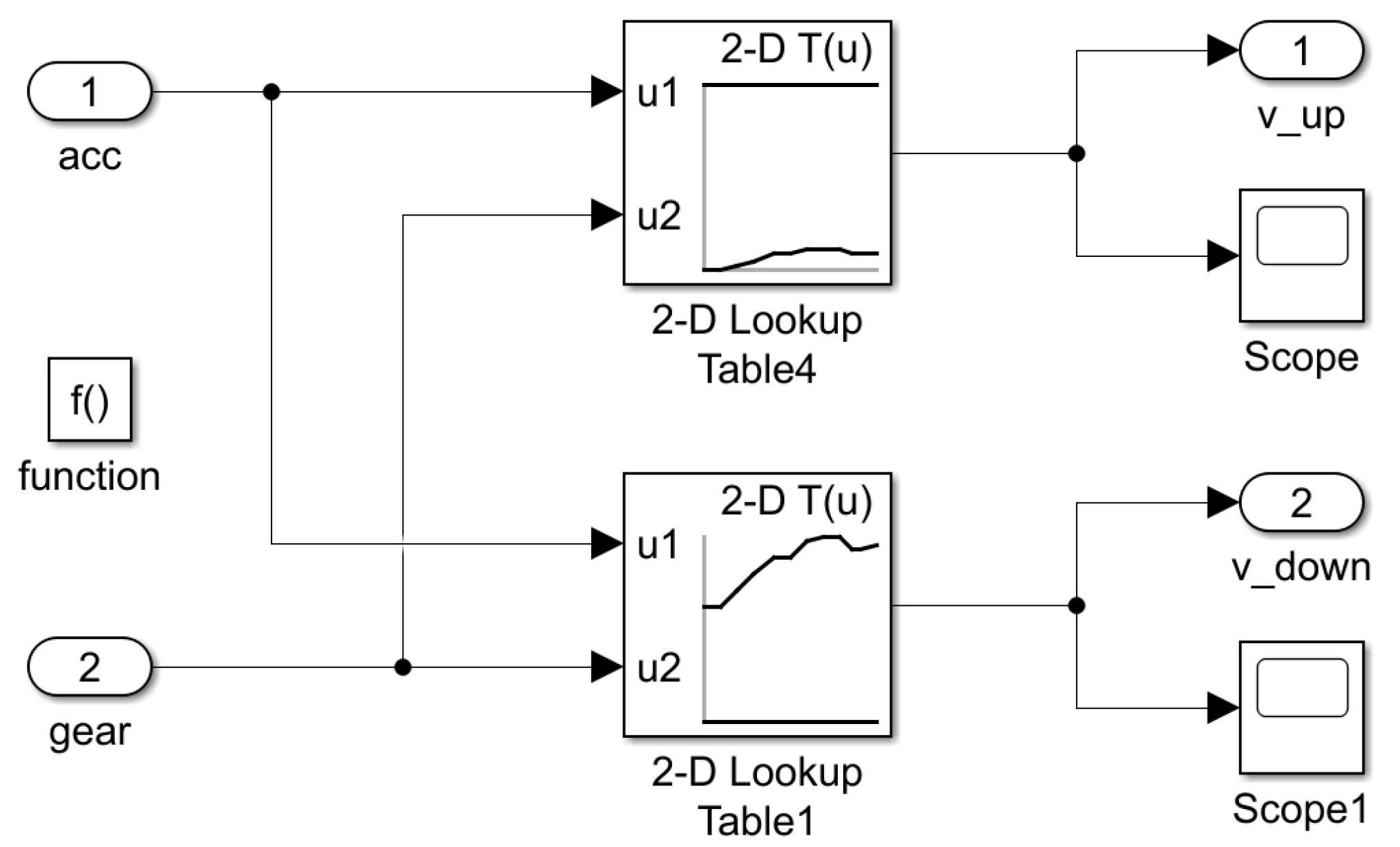
5.2.1. Shift Rule Model
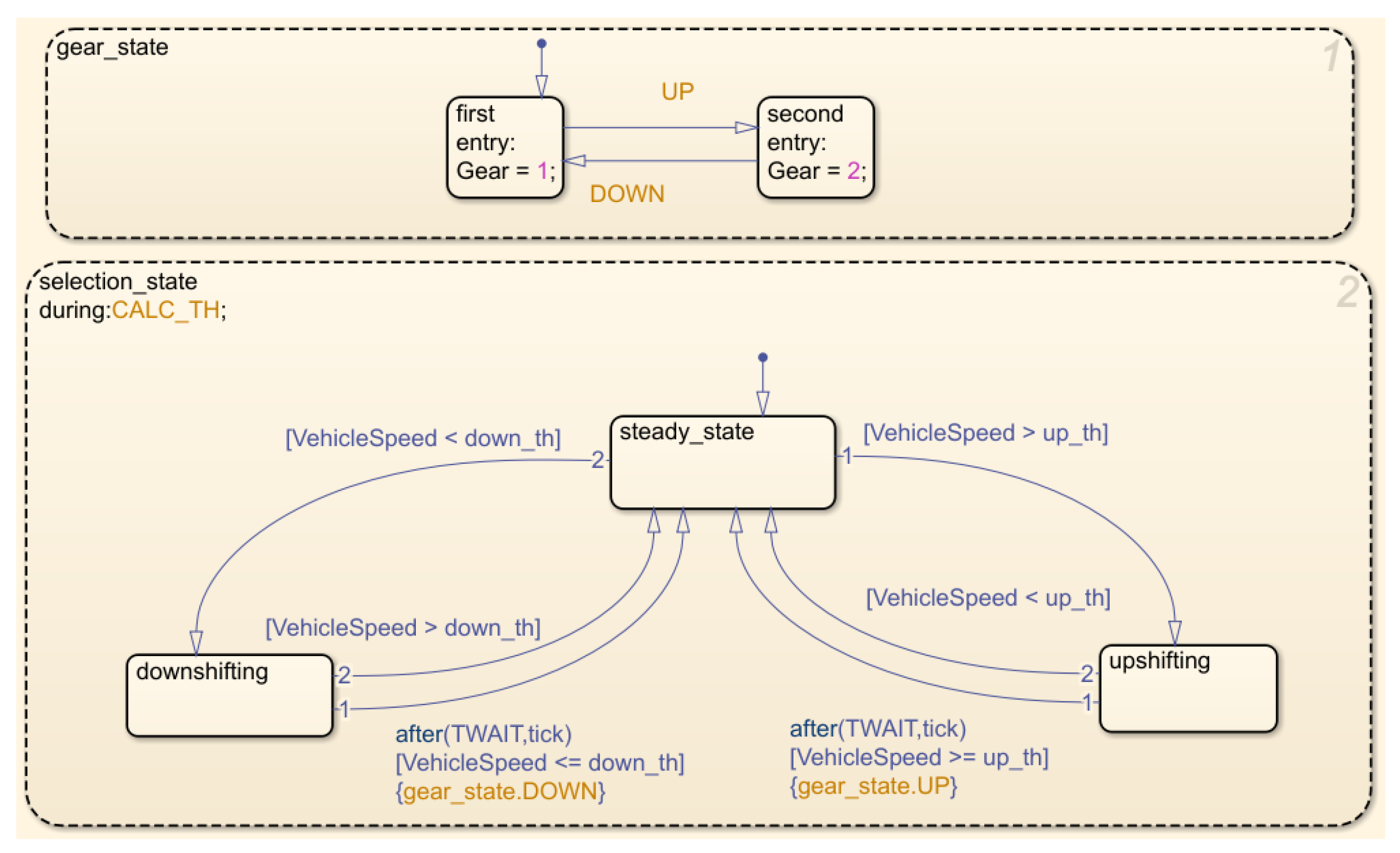
5.2.2. Shift Logic Model
5.3. Shift Rule Simulation Analysis
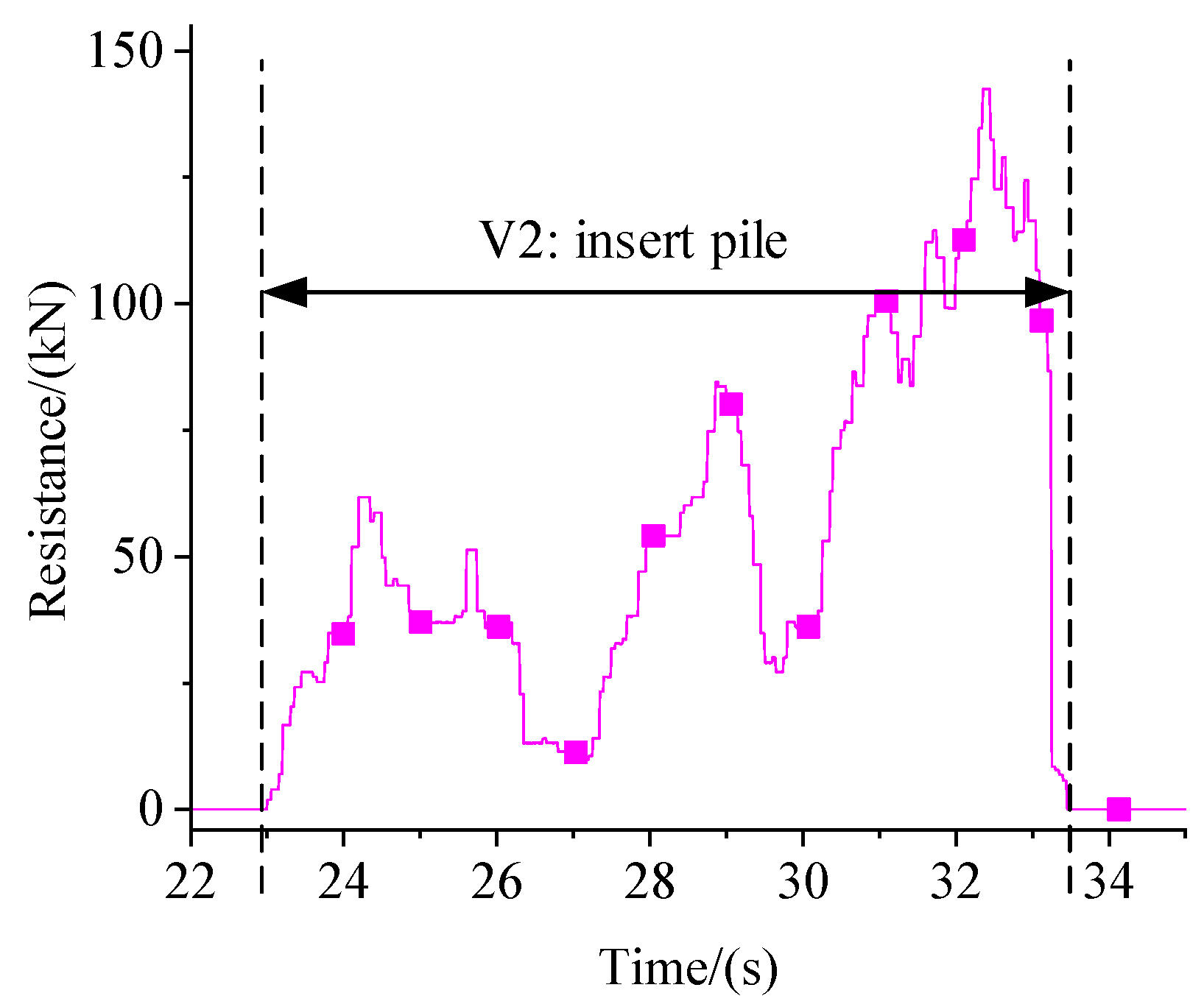
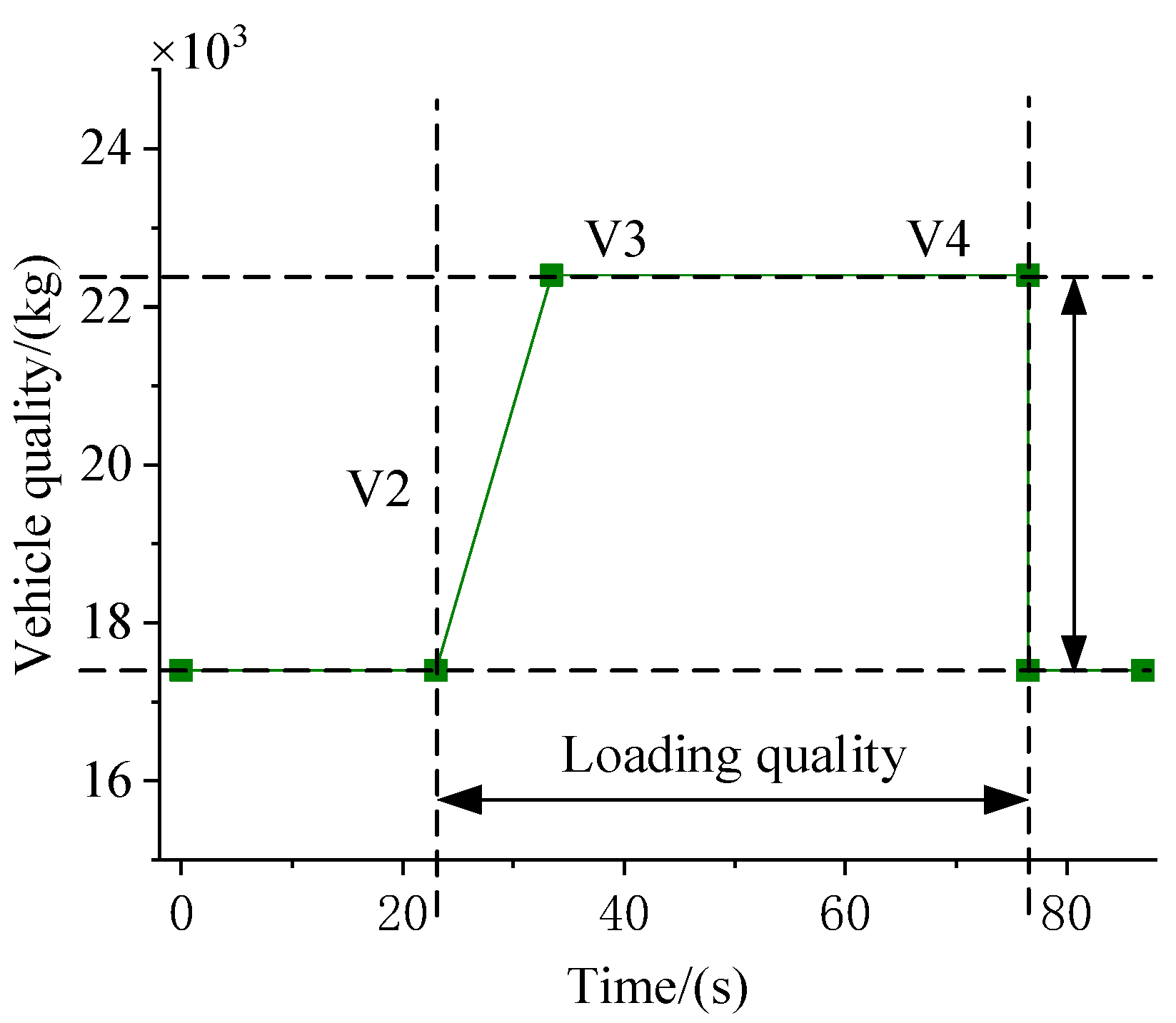
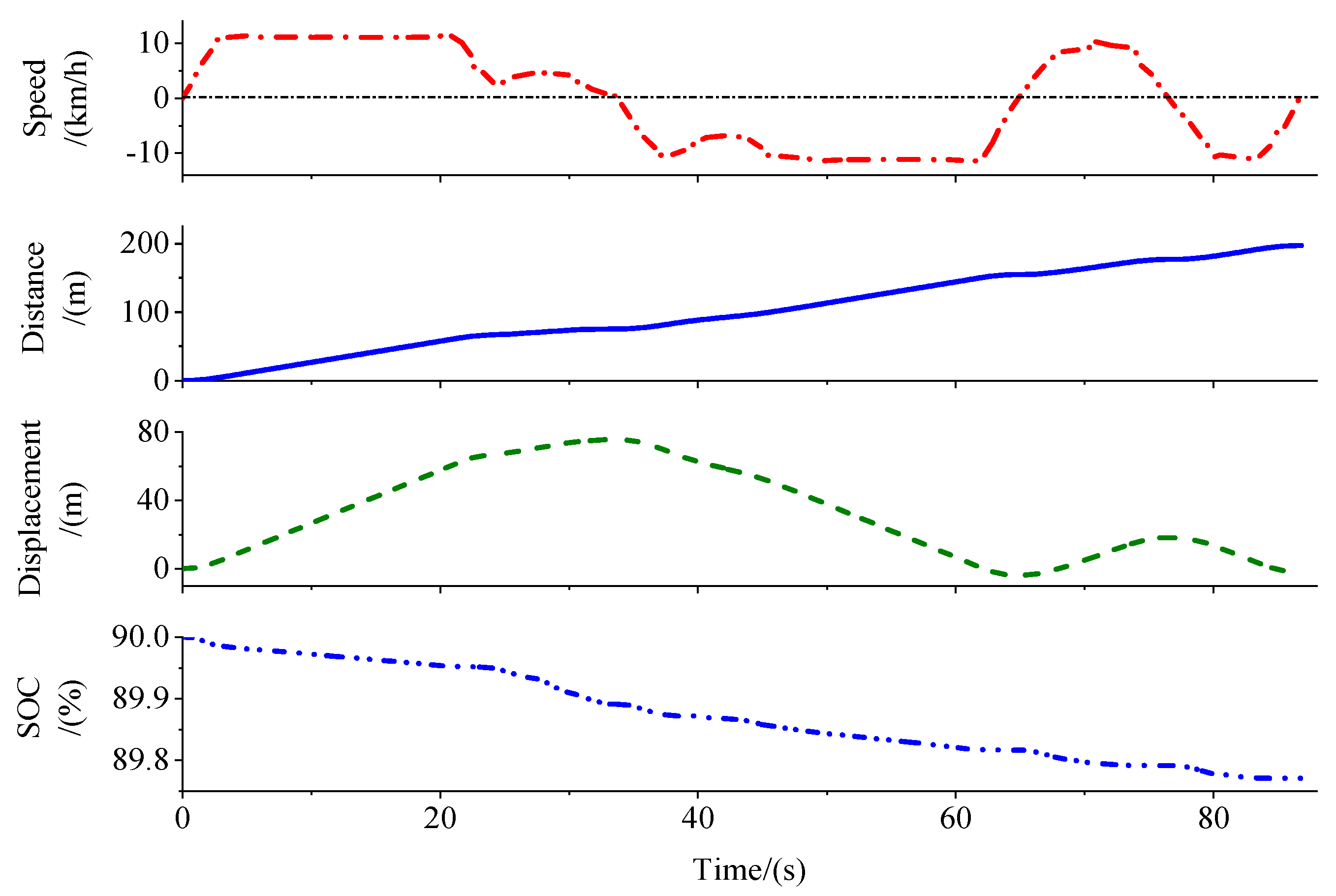
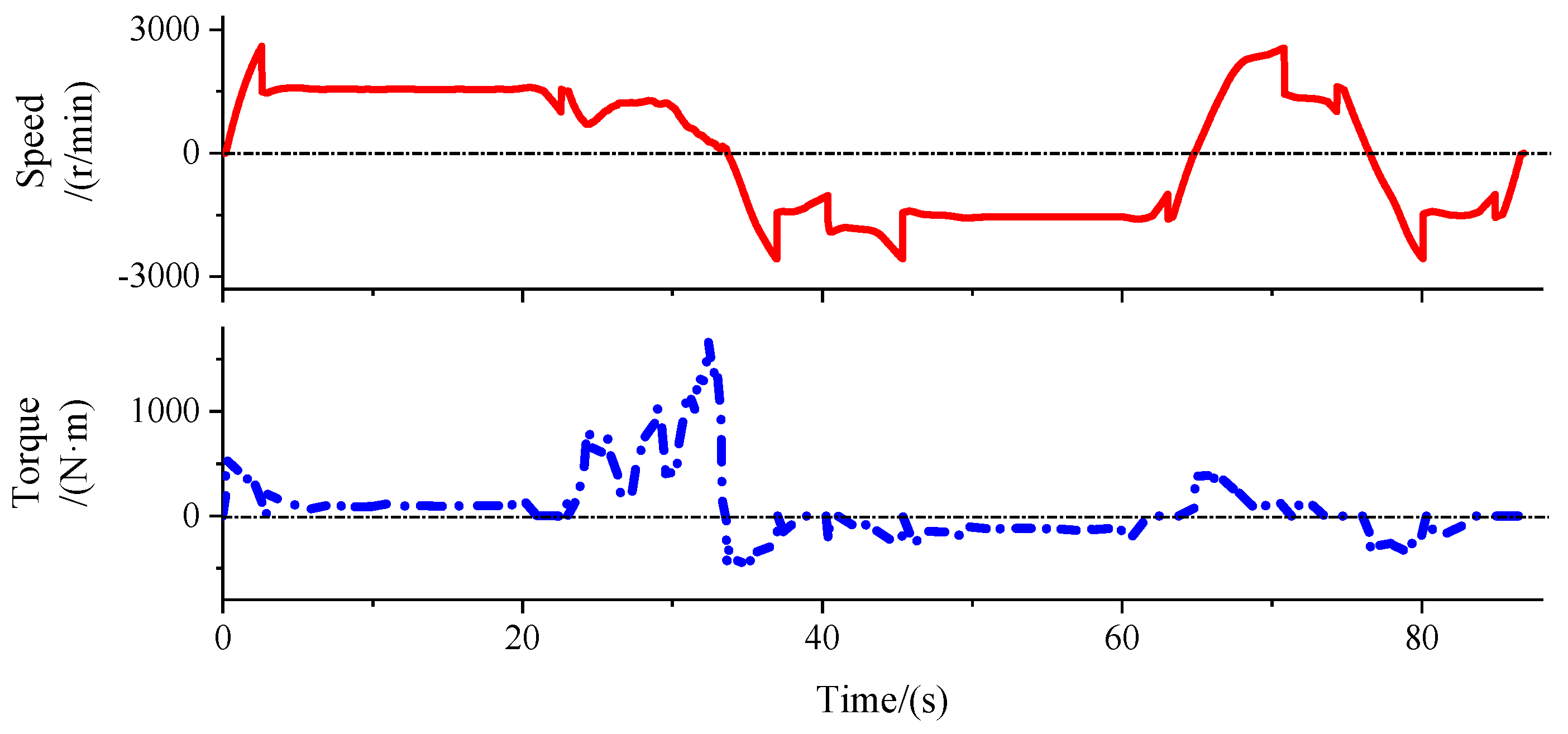
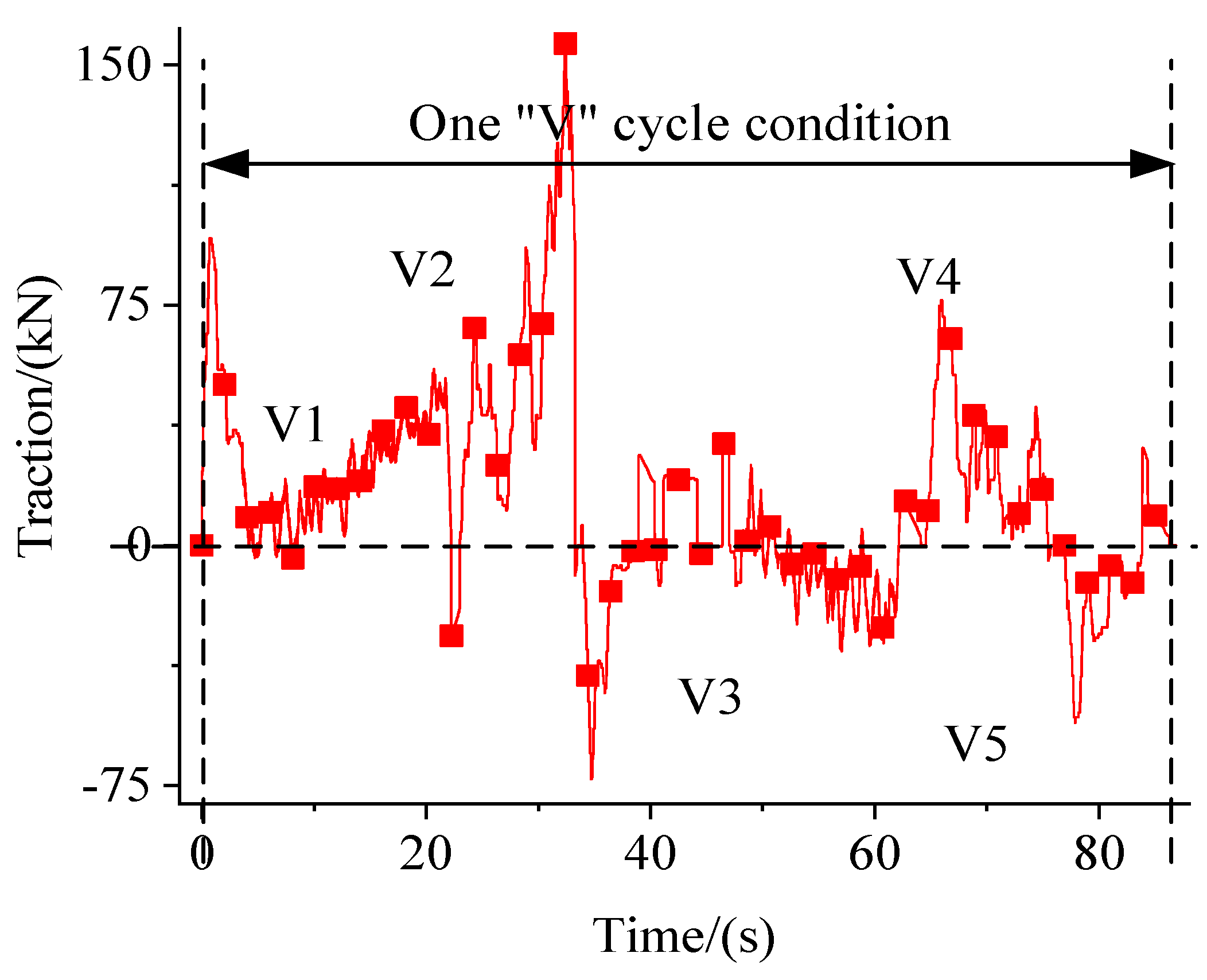
5.3.1. Shovel Loading Condition
Simulation Results of Loader “V” Cycle
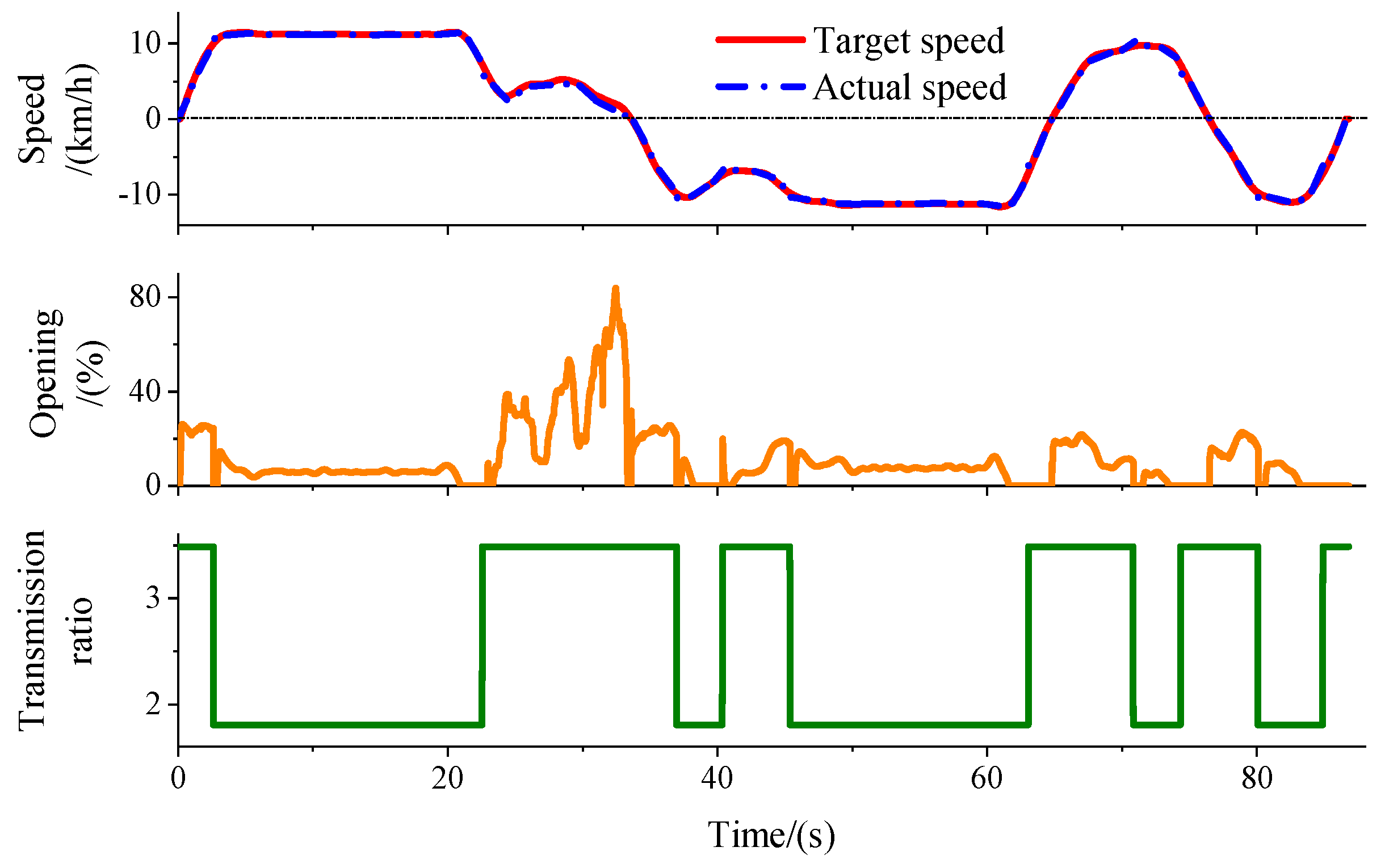
Simulation Results of Loader Shift Rule
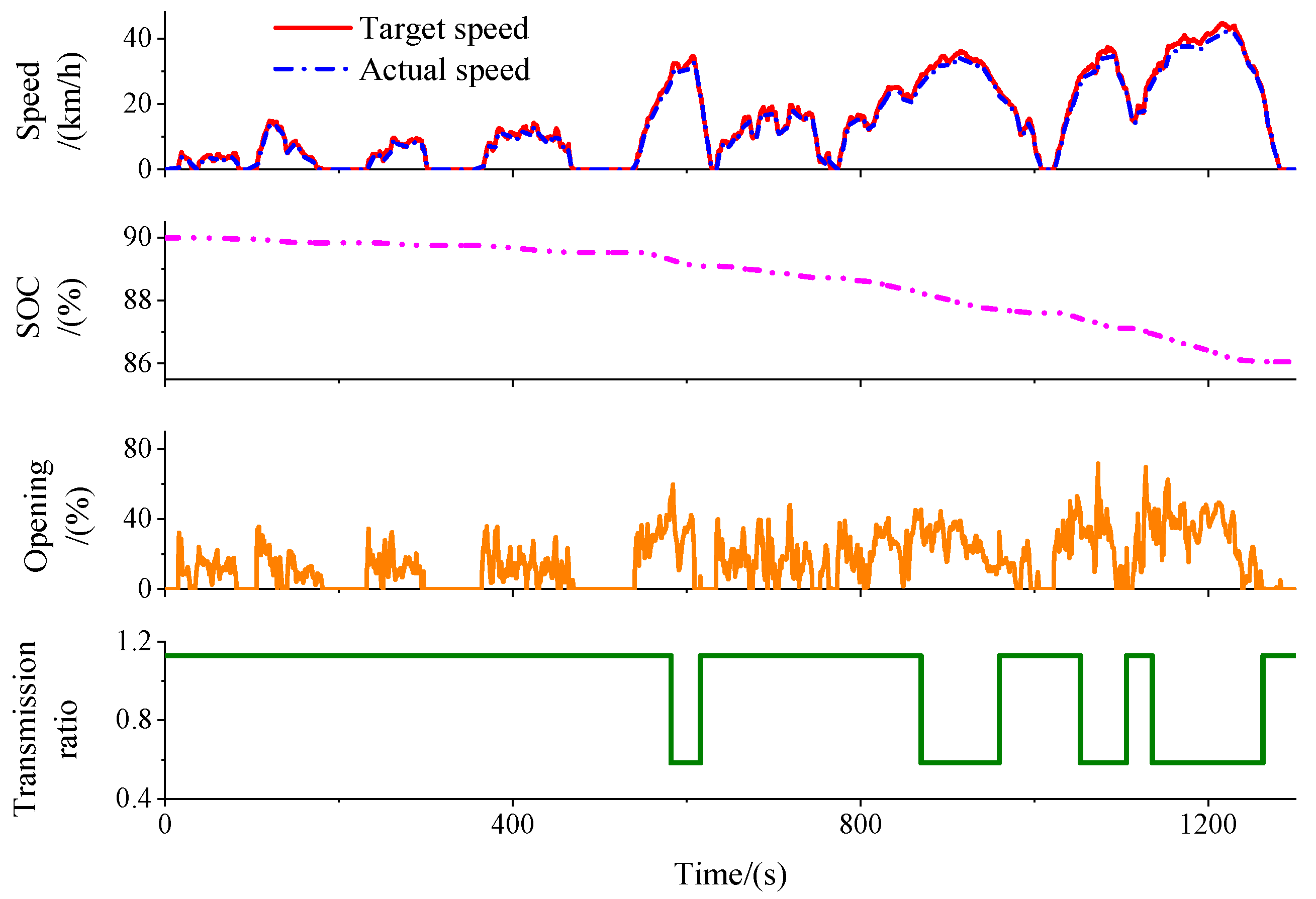
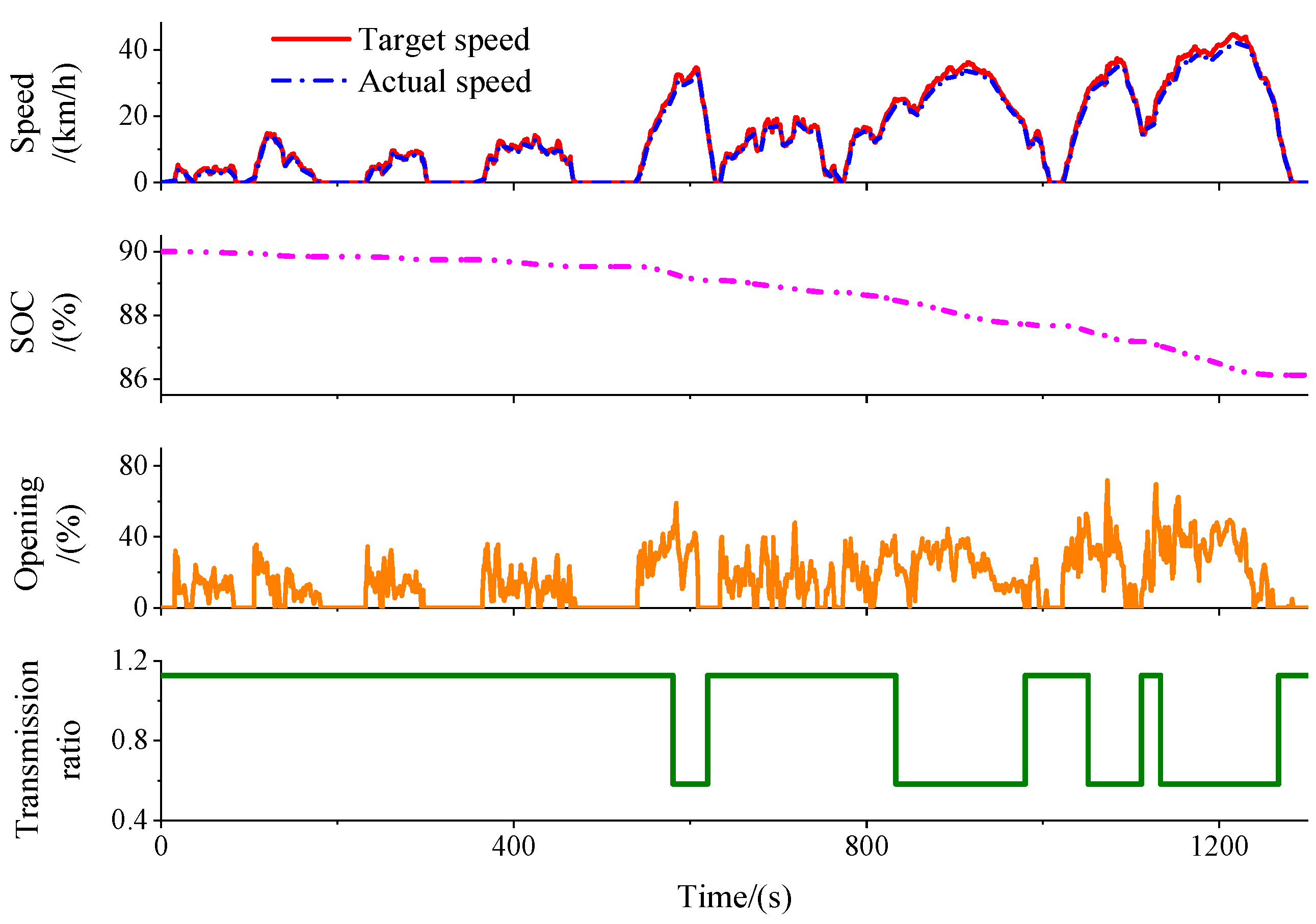
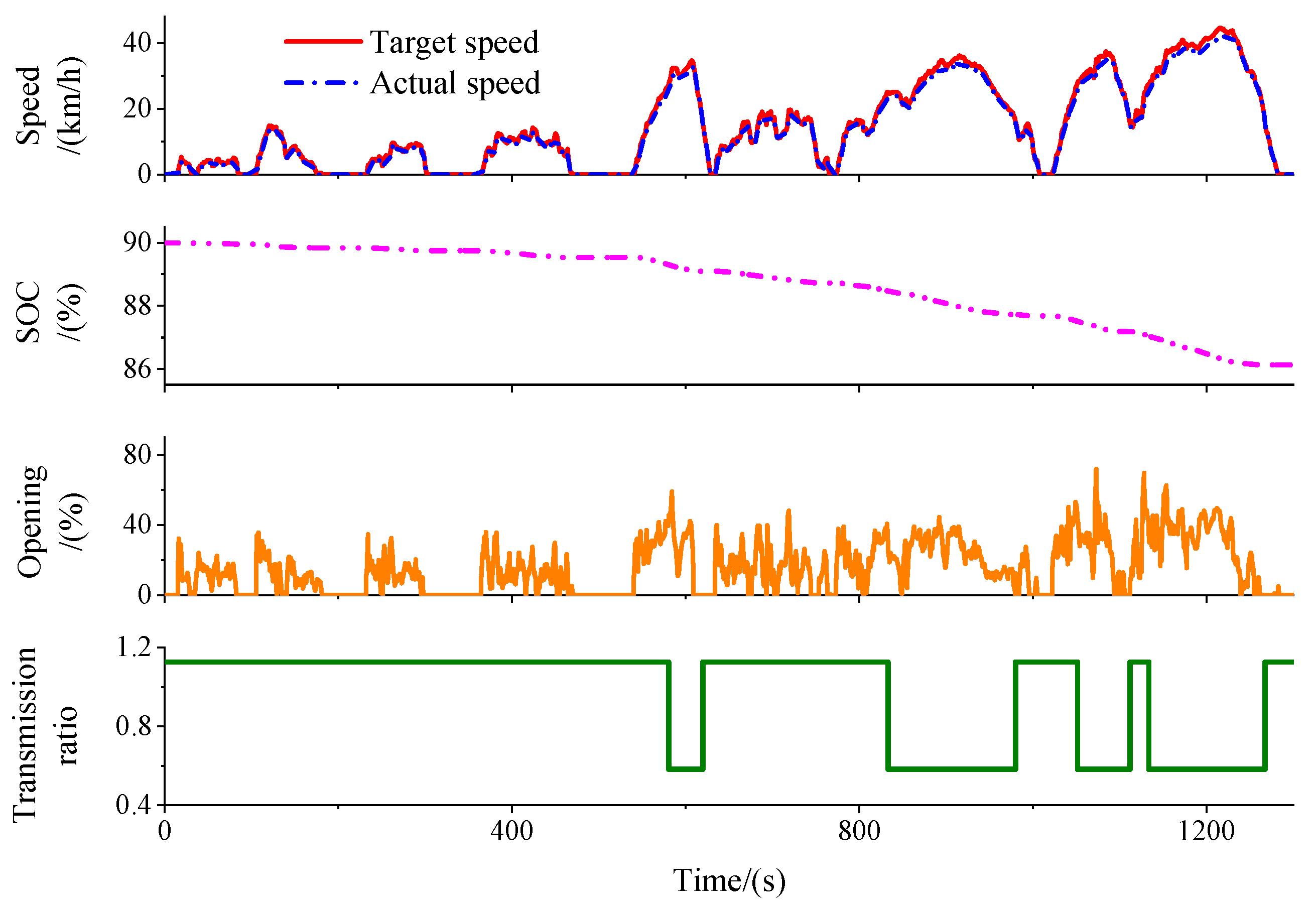
5.3.2. Transfer Conditions
Economy Characteristic
Dynamic Performance
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Lin, T.; Ren, H. Development and key technologies of pure electric construction machinery. Renew. Sustain. Energy Rev. 2020, 132, 110080. [Google Scholar] [CrossRef]
- Guo, T.; Cai, S. Electro-hydraulic shift system and control strategy for pure electric loader based pressure feedback. Chin. Hydraul. Pneum. 2020, 0, 22–29. [Google Scholar]
- Oh, J.J.; Choi, S.B.; Kim, J. Driveline modeling and estimation of individual clutch torque during gear shifts for dual clutch transmission. Mechatronics 2014, 24, 449–463. [Google Scholar] [CrossRef]
- Oh, J.J.; Choi, S.B. Real-Time Estimation of Transmitted Torque on Each Clutch for Ground Vehicles With Dual Clutch Transmission. IEEE/ASME Trans. Mechatron. 2014, 20, 24–36. [Google Scholar] [CrossRef]
- Oh, J.J.; Eo, J.S.; Choi, S.B. Torque Observer-Based Control of Self-Energizing Clutch Actuator for Dual Clutch Transmission. IEEE Trans. Control. Syst. Technol. 2016, 25, 1856–1864. [Google Scholar] [CrossRef]
- Walker, P.D.; Zhang, N.; Tamba, R. Control of gear shifts in dual clutch transmission powertrains. Mech. Syst. Signal Process. 2011, 25, 1923–1936. [Google Scholar] [CrossRef] [Green Version]
- Hu, Y.; Tian, L.; Gao, B.; Chen, H. Nonlinear gearshifts control of dual-clutch transmissions during inertia phase. ISA Trans. 2014, 53, 1320–1331. [Google Scholar] [CrossRef] [PubMed]
- Wu, M. Hamilton Jacobi Inequality based sliding mode robust control for optimal torque transmissions of Dry Dual Clutch assembly in torque phase of shift. In Proceedings of the IEEE International Conference on Mechatronics and Automation, Kagawa, Japan, 6–9 August 2017; pp. 1900–1905. [Google Scholar] [CrossRef]
- Kim, J.; Choi, S.B.; Oh, J.J. Adaptive Engagement Control of a Self-energizing Clutch Actuator System Based on Robust Position Tracking. IEEE/ASME Trans. Mechatron. 2018, 23, 800–810. [Google Scholar] [CrossRef]
- Wang, W.; Xiang, C. Design and optimization of parameters of gear-shifting quality control for heavy parallel-series hybrid electric vehicle. China J. Highw. Transp. 2021, 24, 121–126. [Google Scholar]
- Gao, B.; Chen, H.; Zhao, H.; Sanada, K. A Reduced-Order Nonlinear Clutch Pressure Observer for Automatic Transmission. IEEE Trans. Control Syst. Technol. 2009, 18, 446–453. [Google Scholar] [CrossRef]
- Sun, W.; Chen, H. Shifting process adaptive control strategy with electronic automatic transmission. J. Mech. Eng. 2009, 1, 293–299. [Google Scholar] [CrossRef]
- Li, C.; Jian, H. Control trajectory optimization method of automatic transmission gear-shift. Acta Armamentarii 2020, 41, 2155–2169. [Google Scholar]
- Lyu, L.; Chen, Z.; Yao, B. Advanced Valves and Pump Coordinated Hydraulic Control Design to Simultaneously Achieve High Accuracy and High Efficiency. IEEE Trans. Control. Syst. Technol. 2021, 29, 236–248. [Google Scholar] [CrossRef]
- Ding, C.; Zhao, D. Experimental study on automatic shift system with four-parameter of construction vehicle. Trans. Chin. Soc. Agric. Mach. 2006, 37, 16–18. [Google Scholar]
- Gao, Z.; Du, M. Design of shifting rules of automatic transmission based on genetic algorithm optimization and fuzzy control dynamic optimization. Acta Armamentarii 2021, 42, 684–696. [Google Scholar]
- Zhe, L.; Lu, X. Optimization of Dual Clutch Transmission Shift Schedule Based on Fuzzy Algorithm. In Proceedings of the 2016 IEEE International Conference on Vehicular Electronics and Safety, Beijing, China, 10–12 July 2016; pp. 2–7. [Google Scholar]
- Zhao, D.; Li, T. Automatic shift technology of hybrid power engineering vehicle. J. Jilin Univ. 2014, 44, 358–363. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component | Parameter | |
|---|---|---|
| Li-ion phosphate battery | Nominal energy: 281.91 kWh | |
| Nominal capacity: 456 Ah | ||
| Voltage: 480~700 V | ||
| Permanent magnet synchronous motor | Rated power: 110 kW Peak power: 220 kW Rated speed: 1000 r/min Rated torque: 1050 N·m Rated voltage: 380 V | |
| Shift box | Low-speed mode L | Forward F 1st gear: 3.488 |
| Forward F 2nd gear: 1.806 | ||
| Reverse R 1st gear: 3.488 | ||
| Reverse R 2nd gear: 1.806 | ||
| High-speed mode H | Forward F 1st gear: 1.126 | |
| Forward F 2nd gear: 0.583 | ||
| Backward R 1st gear: 1.126 | ||
| Reverse R 2nd gear: 0.583 | ||
| Parameter | Dynamic Shift | Economical Shift | Comprehensive Shift | |
|---|---|---|---|---|
| Economy difference | Energy consumption value/(%) | 3.94 | 3.87 | 3.87 |
| Comprehensive difference value/(%) | 0.07 | 0 | - | |
| Proportion of comprehensive difference/(%) | 1.78 | 0 | - | |
| Dynamic difference | Acceleration time/(s) | 4.85 | 5.11 | 4.85 |
| Comprehensive difference value/(s) | 0 | 0.26 | - | |
| Proportion of comprehensive difference/(%) | 0 | 5.09 | - | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cai, S.; Chen, Q.; Lin, T.; Xu, M.; Ren, H. Automatic Shift Control of an Electric Motor Direct Drive for an Electric Loader. Machines 2022, 10, 403. https://doi.org/10.3390/machines10050403
Cai S, Chen Q, Lin T, Xu M, Ren H. Automatic Shift Control of an Electric Motor Direct Drive for an Electric Loader. Machines. 2022; 10(5):403. https://doi.org/10.3390/machines10050403
Chicago/Turabian StyleCai, Shaole, Qihuai Chen, Tianliang Lin, Mingkai Xu, and Haoling Ren. 2022. "Automatic Shift Control of an Electric Motor Direct Drive for an Electric Loader" Machines 10, no. 5: 403. https://doi.org/10.3390/machines10050403
APA StyleCai, S., Chen, Q., Lin, T., Xu, M., & Ren, H. (2022). Automatic Shift Control of an Electric Motor Direct Drive for an Electric Loader. Machines, 10(5), 403. https://doi.org/10.3390/machines10050403