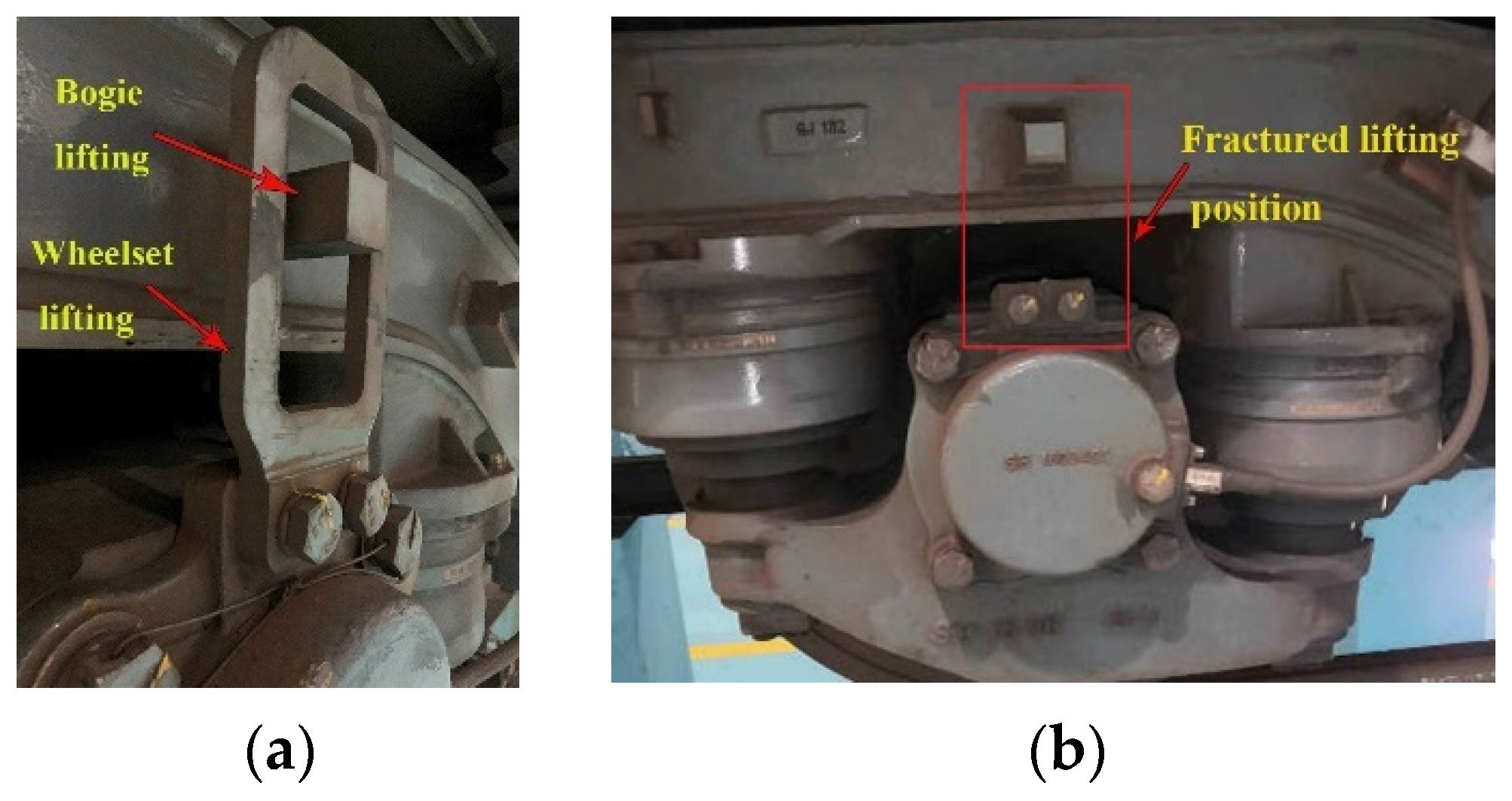
As the main component of a railway vehicle, a wheelset lifting mechanism is installed on the axle-box end cover and used to lift the wheelset by the frame during lifting to facilitate the overall movement of the bogie. However, high-dimensional time-dependent harmonic load, random load, and the complexity and uncertainty of the environment during the service and operation of vehicles can lead to cracks or fractures of the wheelset lifting mechanism, seriously affecting the operational quality and reliability [
1,
2,
3]. Therefore, it is necessary to comprehensively analyze the crack-generation mechanism to reduce the vehicle fault caused by cracks and fractures of the wheelset lifting mechanism, which can provide a reference for structural optimization and performance improvement.
For the structure of railway vehicles, stress concentration, fatigue, corrosion, and metallurgical problems are the main causes of crack or fracture initiation. It has been reported that about 90% of all mechanical failures are caused by fatigue [
4,
5]. To date, considerable efforts have been made to investigate the crack initiation or fracture behaviors of fatigue through analytical, numerical, and experimental methods. Among those, FE and numerical simulation methods have attracted the most attention. Lu et al. [
6] studied the effects of vibration modes on fatigue damage in a high-speed train bogie frame under random loading conditions by combining modal analysis and dynamic simulation. Liu et al. [
7] proposed a new and improved version of the Corten-Dolan model, where the fatigue behavior of engineering materials and structures under variable amplitude load was well described by numerical simulation. Yang et al. [
8] investigated the life prediction and durability assessment of brake unit brackets by combining FE and numerical simulations. Zuo et al. [
9] reported a Bayesian analytical model to quantify the main uncertainty factors that affect the bogie failure. Liao et al. [
10] conducted a rigid–flexible coupling dynamic simulation to predict the fatigue life of motor suspension seat structures. Some researchers have attempted to analyze the causes of fatigue cracks and fractures from the perspective of material properties and experiments. For instance, Lucanin et al. [
11] performed stress and acceleration tests on the bogie frame of a diesel multiple unit (DMU) to clarify the reasons for fatigue cracking. Wang et al. [
12] presented a new fatigue reliability evaluation method by combining the in-service measurement of dynamic stress with the probability method. Han et al. [
13] designed a fatigue test on a full-scale test rig to evaluate the fatigue strength of the bogie frame for an urban maglev train. Wang et al. [
14] determined the fatigue reliability of a bogie frame by using the load-spectrum-improving technology of the on-track test. In addition, some material characterization methods have been used to analyze the micro-phenomena of fatigue. Hu et al. [
15] analyzed the metallographic and scanning electron microscope (SEM) results of bolts after tensile tests and combined them with dynamic stress tests to find out the cause of failure. Shen [
16] and Xu [
17] determined the main causes of bogie frame cracks via fracture morphology, chemical composition, tensile properties, metallography, and SEM. The aforementioned studies have mainly employed single methods to analyze the cause of cracks or fractures; thus, their results lack comparison and verification. Therefore, Seo et al. [
18] combined the FE fatigue strength simulation of the bogie frame with a full-scale fatigue test to estimate the structural integrity. Lu et al. [
19] employed accelerated life and numerical test to predict the fatigue life reliability. Fu et al. [
20] determined the main cause of fatigue crack initiation based on modal analysis, actual stress, and acceleration time history. Chen et al. [
21] predicted the fatigue reliability based on FE fatigue strength simulation and static fatigue experiments. Li et al. [
22] proved the causes of abnormal elastic vibration of an electric multiple unit (EMU) car body through dynamic simulation and dynamic stress tests. Despite much research related to analytical, numerical, and experimental methods for determining the structure of railway vehicles, the comprehensive analysis of the mechanism of cracks or fractures during railway operation and structural optimization has rarely been investigated. Unlike the special cases in the experiments, the analysis of crack or fracture mechanisms during the service period includes various uncertain factors, such as track irregularity, wheel irregularity, etc., which can be used to better investigate the real causes of structural failure and further facilitate structural improvement. Therefore, it is necessary to carry out failure mechanism analysis and design optimization based on crack or fracture phenomena during the service period.
Design optimization has been widely studied over the last several decades, and extensive work has been done in the area of railway vehicles. Most of these studies pay more attention to weight and stress minimization due to strict design requirements for light weight and static strength [
23,
24,
25,
26]. However, the anti-fatigue properties of structural design optimization based on weight and stress minimization are particularly poor. In addition, to achieve light weight, railway vehicle structures require additional fatigue optimization and robustness optimization to ensure the anti-fatigue properties of the design [
27]. Consequently, this improves the structural scheme via fatigue optimization to achieve better performance compared with conventional methods. At present, although numerous optimization approaches have been proposed to improve the performance of these structures, few scholars have conducted a comprehensive analysis and proposed a mechanism-based optimization process and algorithm for railway vehicles.
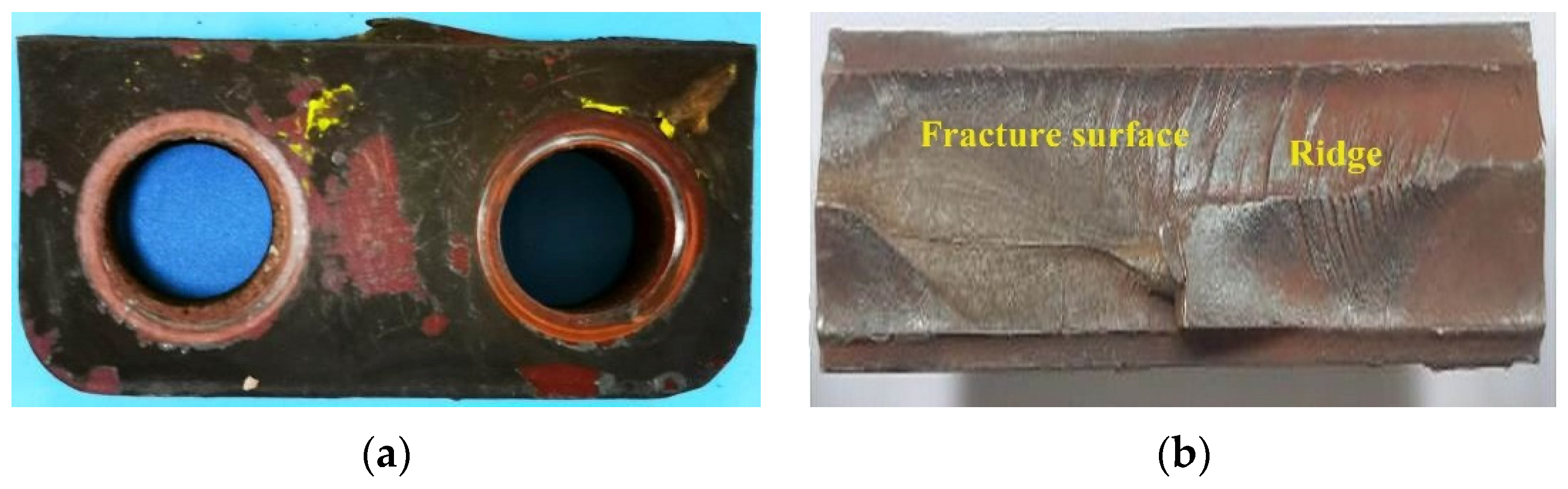
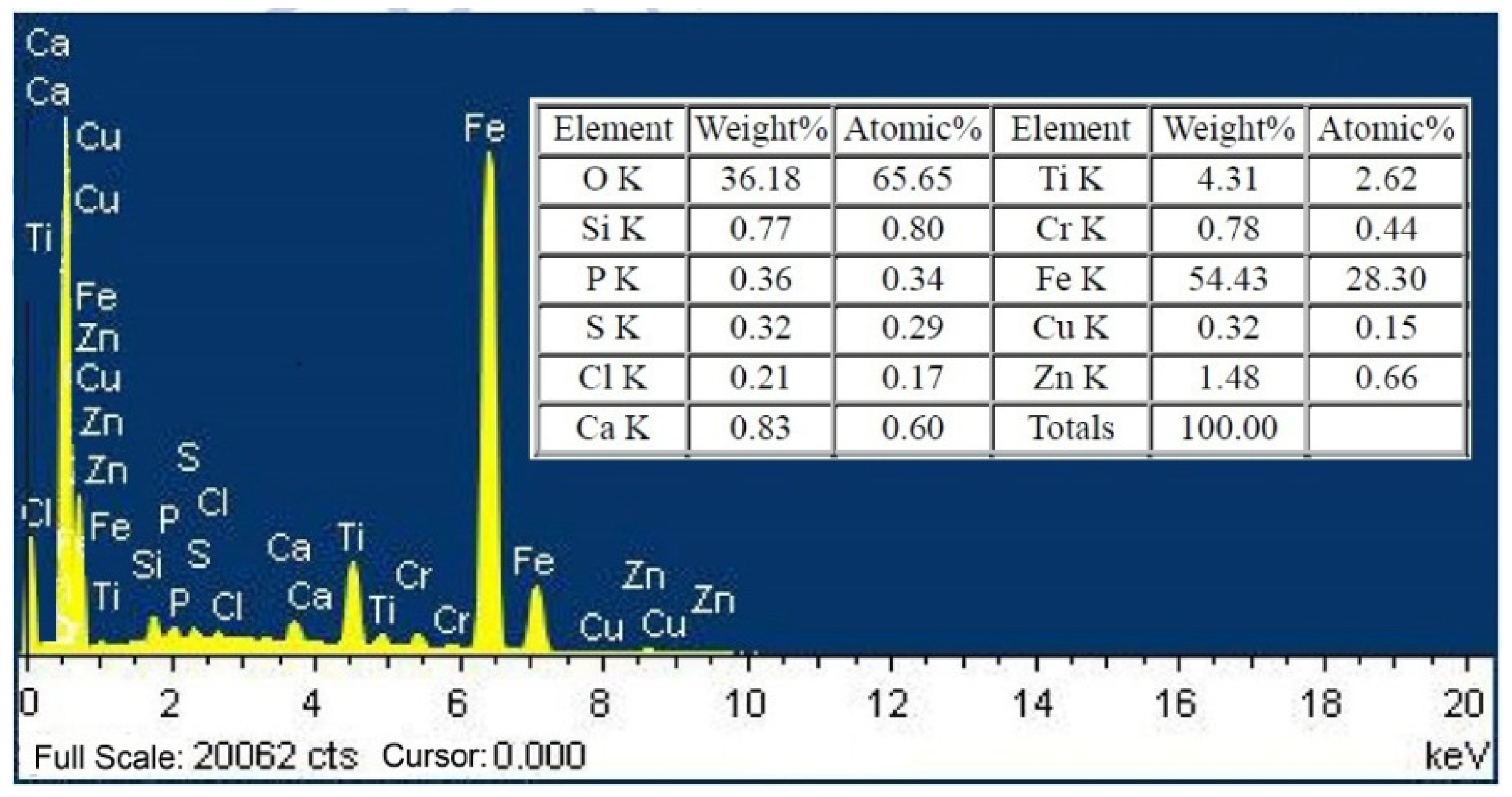
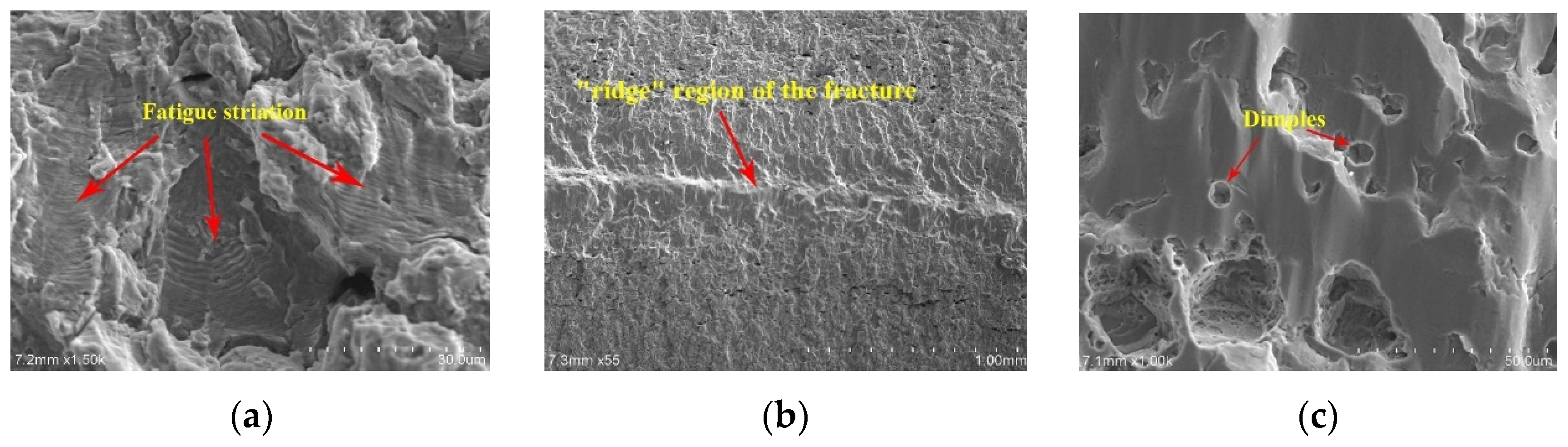
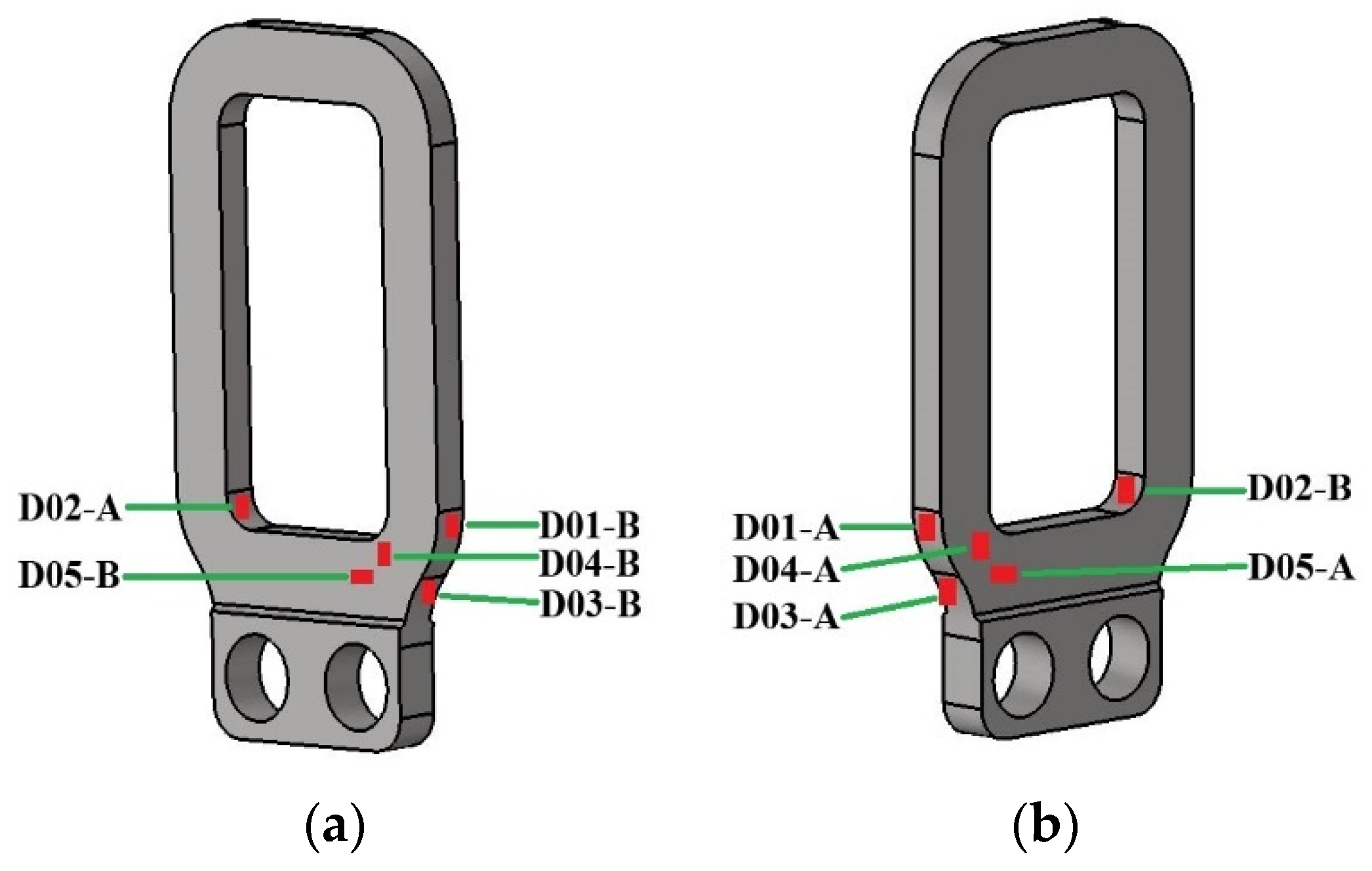
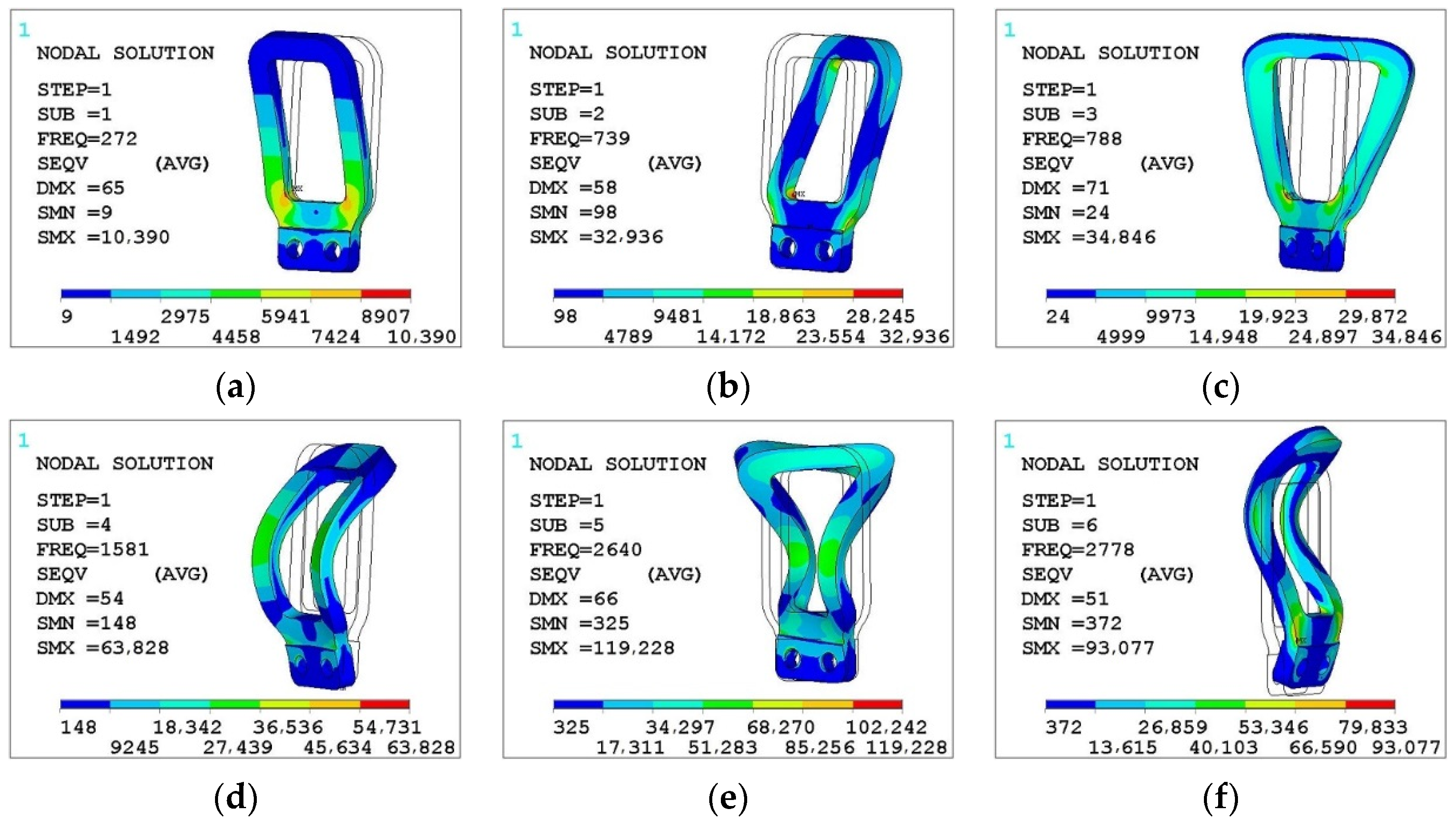
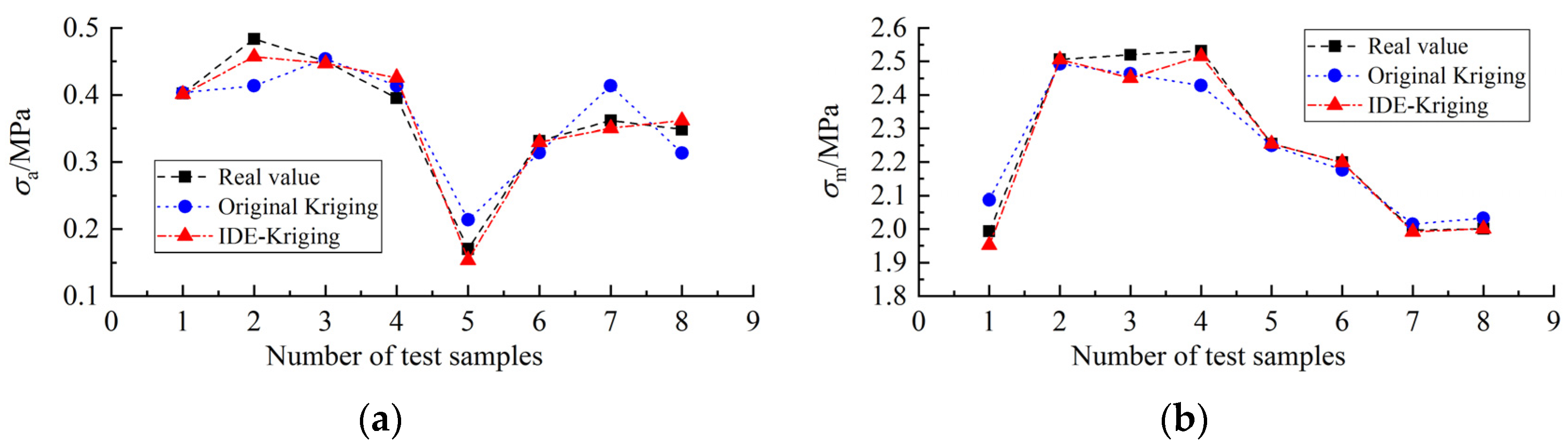
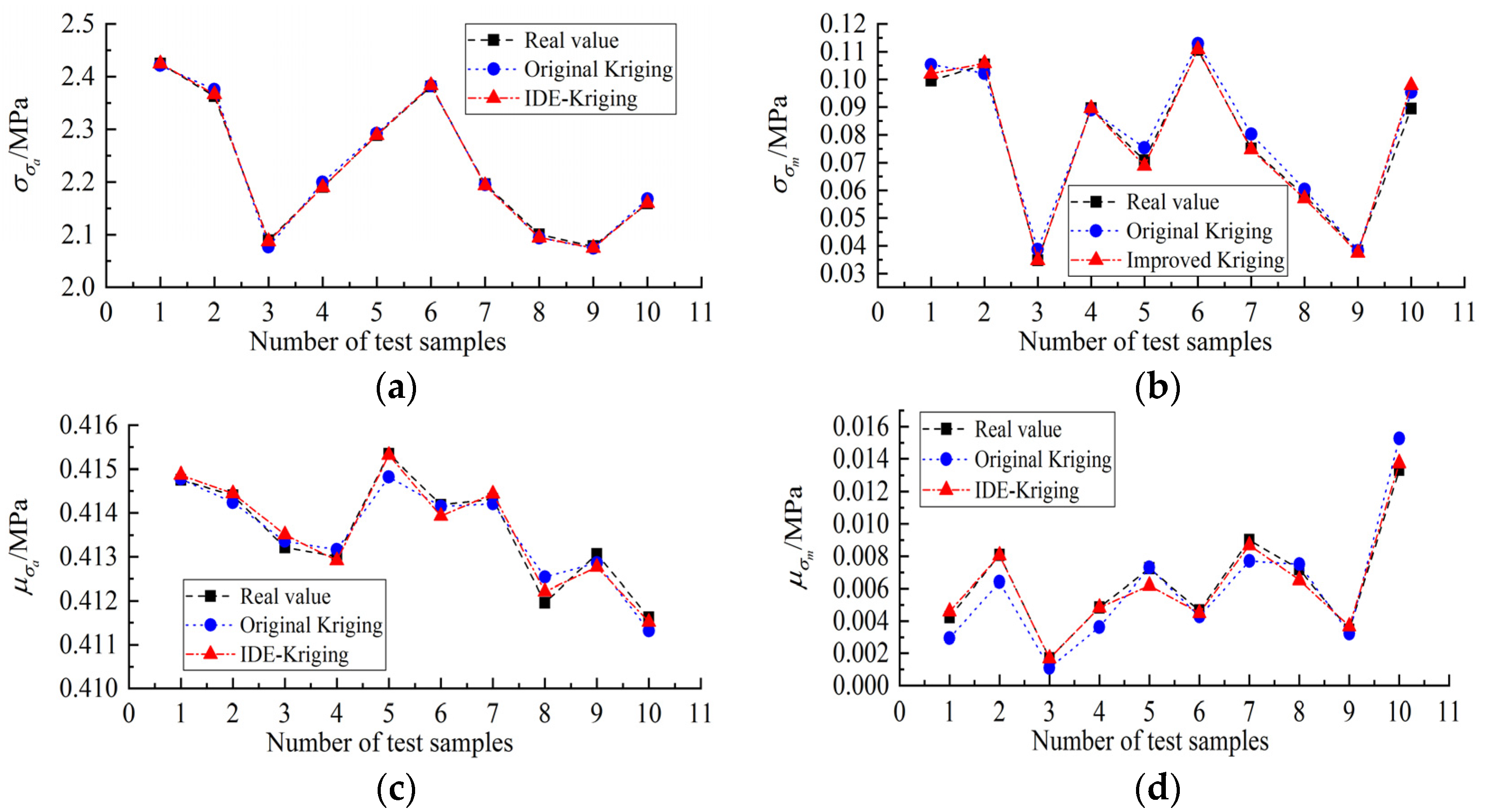
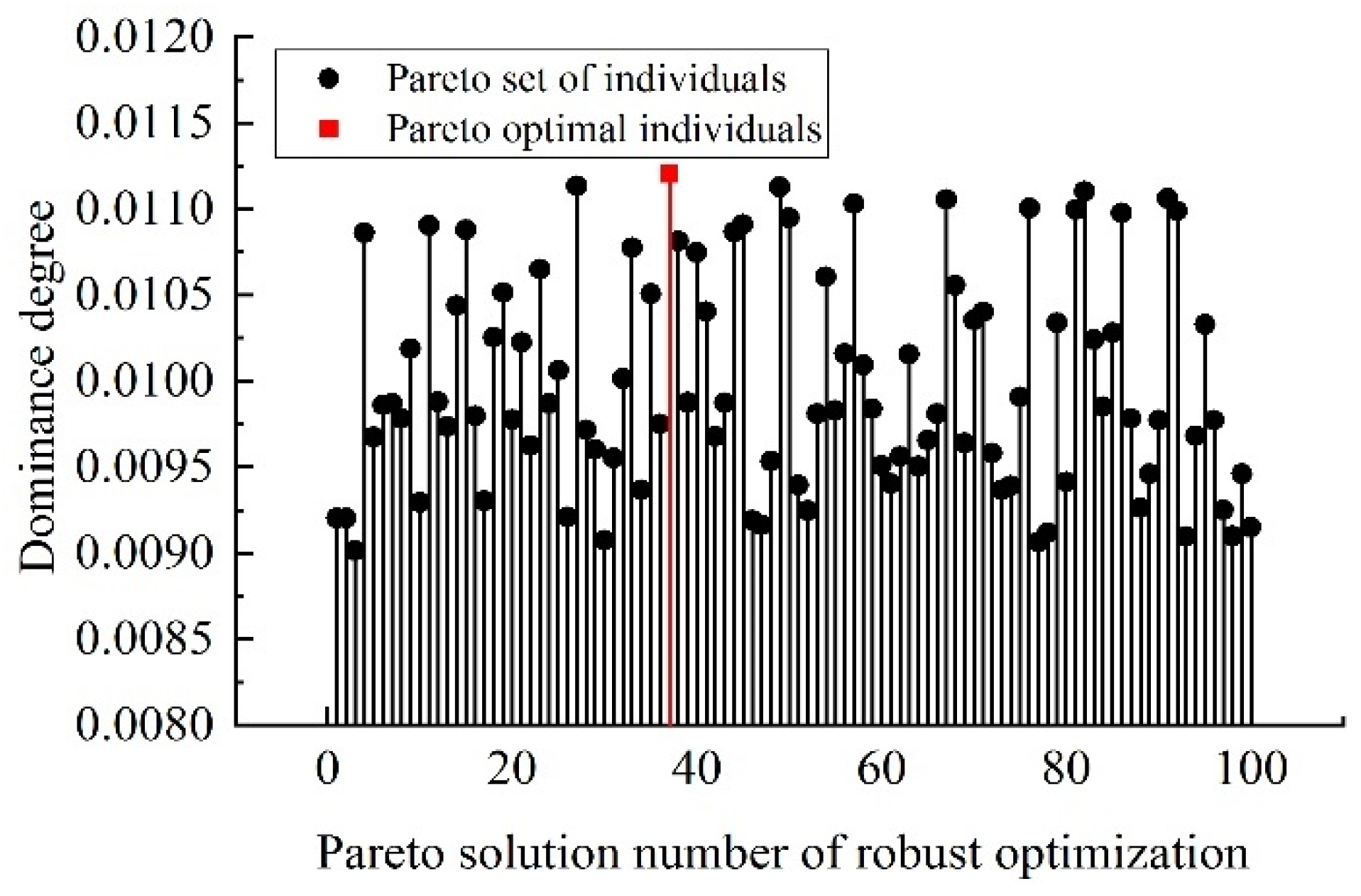
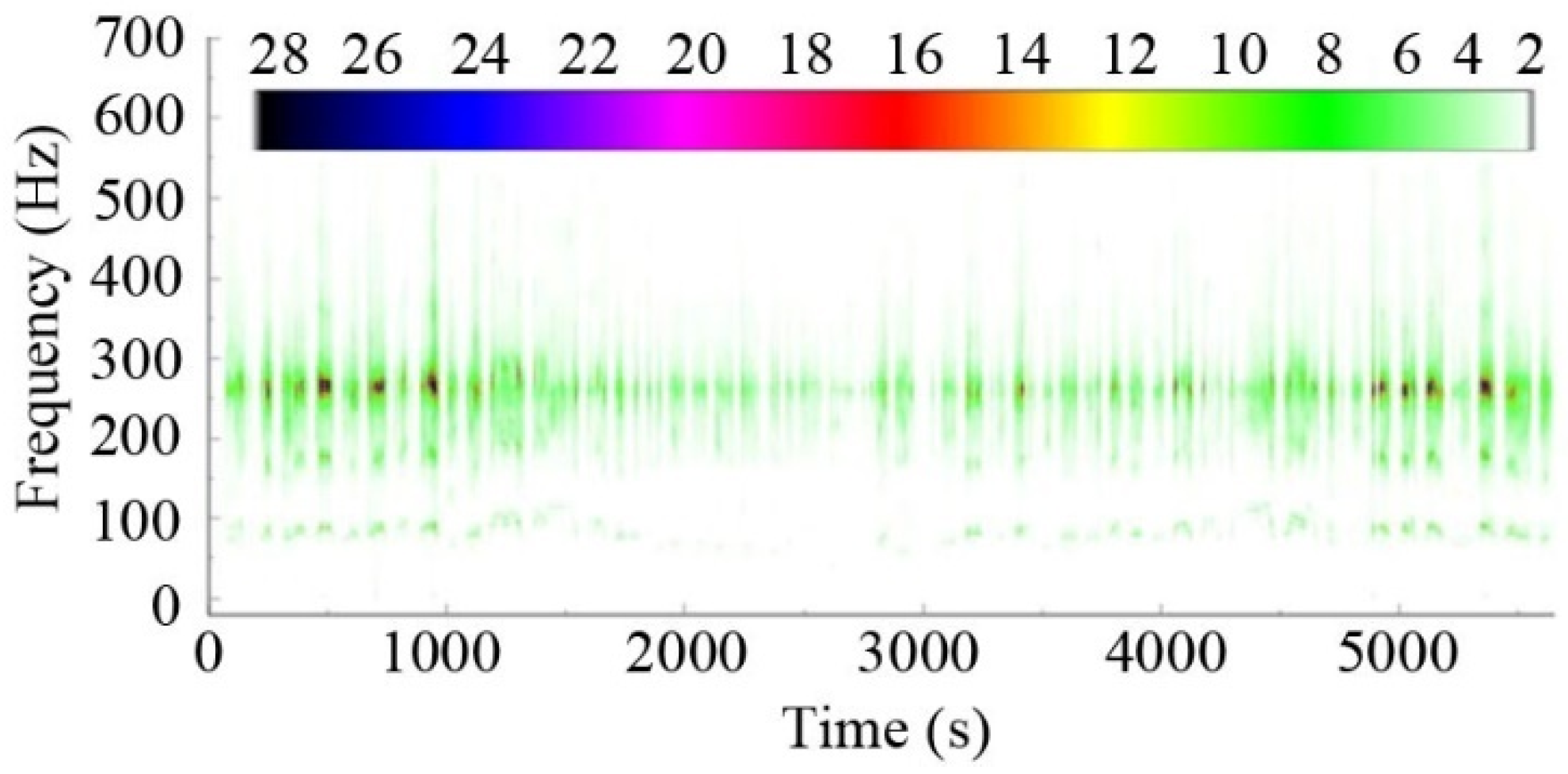
This paper focuses on the fracture mechanism and design optimization of the wheelset lifting mechanism based on experiments and simulations. Macro-examination, fracture SEM analysis, and metallographic examination of fractured lifting mechanisms are carried out to analyze the failure mechanism from a material perspective. A dynamic stress test of the wheelset lifting mechanism is conducted to further explore its fracture mechanism and verify the correctness of the material-based analysis. As a supplement to the macrostructure performance analysis, static strength analysis and modal analysis are performed to perfect the rationality of fracture mechanism analysis, and the weak parts of the structural optimization are identified. An improved NSGA-II is first proposed and combined with a robust fatigue optimization model and double-layer Kriging surrogate model, and an efficient design optimization process of the wheelset lifting mechanism is presented. Finally, the performance of the optimized structure is compared and verified.


 ,
, 










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}