1. Introduction
Spiral bevel gears are used for transmission between two intersecting shafts. They have the advantages of high bearing capacity, light weight, stable transmission, high efficiency, low noise, good lubricity, etc., and are widely used in high-speed gear transmission systems such as aviation systems, automobiles, and ships [
1]. When the gear linear speed exceeds 50 m/s, the teeth of the high-speed rotating gear will form a strong forced vortex, high-velocity field and centrifugal force field in the fluid domain of the gear box and then generate pressure and viscous force on the gear surface, resulting in huge windage power loss, which is the main component of the power loss of high-speed gear transmission [
2,
3]. In order to achieve energy conservation and emission reduction targets, windage reduction is increasingly required for gear transmission efficiency. Therefore, for the high-speed aviation spiral bevel gear, the influence of windage loss on transmission efficiency must be considered.
Lord [
4] attributed 40% of the typical failure of gearbox power loss to meshing loss, 50% to bearing loss and 10% to windage and lubricating-oil-churning loss. However, a large number of experiments show that with the increase in gear linear velocity, the loss of windage and lubricating oil churning becomes significant. Handschuh [
5] pointed out that when the gear linear speed reaches 125 m/s, the windage loss of the gearbox accounts for approximately half of the total power loss and can dominate other loss mechanisms.
Windage loss refers to the loss of aerodynamic resistance (including inertial resistance and viscous resistance) caused by the rotation of gears in the air or oil–gas mixture [
6]. Scholars [
7,
8] have proposed methods for predicting windage losses and provided potential strategies to reduce them. Diab and Ville [
9,
10] experimentally studied the windage loss of rotating spur gears in the air and obtained the analytic formula of the dimensionless torque coefficient of windage loss by dimensional analysis and quasi-analytical method, respectively. Anderson and Loewenthal [
11,
12] proposed an approximate method to estimate the gear windage loss, which considered gear structure, working conditions, fluid properties, etc., and determined gear radius and rotational speed as key parameters to determine the windage loss. However, the linear velocity of the experimental gear was limited to 40 m/s. Eastwick [
13] studied the parameters affecting the windage loss through experiment and theoretical technology, including gear size, geometry, structural form and pitch speed. He believed that the windage loss could be reduced mainly from three aspects: radial pumping effect, axial pumping effect and leakage flow related to the front tooth wake. Ruzek [
14] measured the windage power loss of a disc, spur gear pair and helical gear pair by setting up a simple experimental platform. In order to avoid the interference of gear mesh mechanical power loss, only the influence of air pressure and viscous force on the windage of gear tooth surface and end face were considered. Lord [
4] designed a test facility for measuring the windage power loss of spur gears. The diameter range of spur gears he tested was 90~200 mm, and the speed was 25,000 rpm. The conclusion indicates that when the clearance is 1 mm, the windage power loss will be reduced to the lowest level. Compared to the spur gear without shroud, the windage loss would be reduced by 75%. Dawson [
15] pointed out that for spur gears that rotate freely in air, air enters the teeth from both sides. However, for bevel gears, the air enters the teeth from the toe end and the tooth surface and is gradually thrown out along the direction of the tooth length. If the shrouds were arranged on the toe and heel faces, tooth surfaces and axial directions, the fluid mass flow rate through the shrouds into the gear would be reduced, so that the efficiency of the shroud to pump fluid would be reduced, thereby reducing the windage power loss. Johnson [
16] experimentally studied the windage loss of a single spiral bevel gear under different working conditions in air single-phase flow, indicating that the shroud can reduce the windage power consumption by about 70%. He pointed out that the characteristics of a spiral bevel gear are similar to those of a centrifugal fan in many aspects. Winfree [
17] obtained the windage loss data of a spiral bevel gear through a large number of experiments. The results show that if a baffle is installed at the toe of the tooth, the windage power loss will be reduced by 70%. If a shroud is installed, the windage power loss will be reduced by 79%. If the linear speed of the gear exceeds 50.8 m/s, it is necessary to install the shroud. He carried out experiments on the windage loss of a single spiral bevel gear to determine the measures to reduce the windage loss and then applied these theoretical methods to the meshed spiral bevel gear. The results show that the optimized shroud has an obvious effect on reducing the windage loss [
18].
The detailed flow mechanism of the fluid around the gear will help with designing an efficient shroud configuration to reduce air power loss. With the development of computer technology, the computational fluid dynamics methods have been used to predict the flow field characteristics in the gearbox [
19,
20,
21]. Hill [
22] specifically described the important physical characteristics of the three-dimensional flow field near the tooth region, and the influence of the shroud geometry structure on a single spur gear was studied by CFD. Comparing to the experimental data from NASA, it was found that the gear windage power loss is mainly due to the pressure on the involute gear surface rather than the shear force, with or without a shroud. Massini [
23] first measured the related parameters of the windage loss of a single spur gear under free lubrication by experiment and then measured the velocity and vector diagram of flow fluid by using Particle Image Velocimetry (PIV) technique. The results verified that CFD numerical simulation is an effective tool for predicting windage power loss. This was one of the first experiments to realize the visualization of flow field near high-speed gear by PIV technology. Simmons [
24] studied the windage power loss of a single spiral bevel gear (with or without shroud) and meshing gear pairs by experimental and numerical simulation analysis. The results showed that the Cm-Re characteristics of bevel gears with shroud were similar to those of cones with shroud. Rapley [
25] conducted parametric research on the clearance of spiral bevel gear at the inlet, outlet and end face of shroud by CFD. The torque coefficient and static pressure obtained by simulation analysis were close to the experimental results.
It is worth noting that the current research on gear windage loss is mainly focused on macro-fluid mechanisms and geometric parameters. There are few comprehensive studies on the effects of various shroud combinations on the flow characteristics and aerodynamic resistance loss characteristics of spiral bevel gears. The research on the windage loss characteristics of spiral bevel gears and the windage reduction mechanism of shroud is not deep enough, and a feasible structural optimization design method of shroud in practical engineering application has not been put forward. In this paper, aiming at the input-stage spiral bevel gear transmission in the main reducer of a helicopter, the mechanism of reducing the windage loss of the shroud is studied by CFD based on the mechanical and energy characteristics of the windage loss of the spiral bevel gear. Based on that, the structural optimization design principle of the shroud is proposed.
5. Mechanism of Reducing the Windage Loss of Shroud and Structural Design Principle
5.1. Calculation of Gear Windage Power Loss
The windage torque exerted by the fluid on all surfaces of the gear can be obtained using CFD-POST. According to the mechanism of gear windage power loss, the viscous force and pressure on the surface of each cell are different. Therefore, the windage torque on a certain wall can be obtained by calculating the vector sum of the torque of the pressure and viscous force on the specified axis on all elements of the wall. The calculation formula is:
where
T is the windage moment of the gear (N·m);
Fp is the pressure vector on the element surface (N);
Fν is the viscous force vector on the element surface (N);
r is the setting axis vector;
n is the number of cells on the selected surface.
The formula of the windage power loss of gear pair is:
where
Twf,
Twt,
Twh and
Tws are the windage torque of the tooth surface, the toe surface, the heel surface and the gear shaft surface, respectively; Ω is the rotation speed (r/min);
i takes value 1 to indicate the pinion and 2 to indicate the gear.
5.2. Orthogonal Test Design
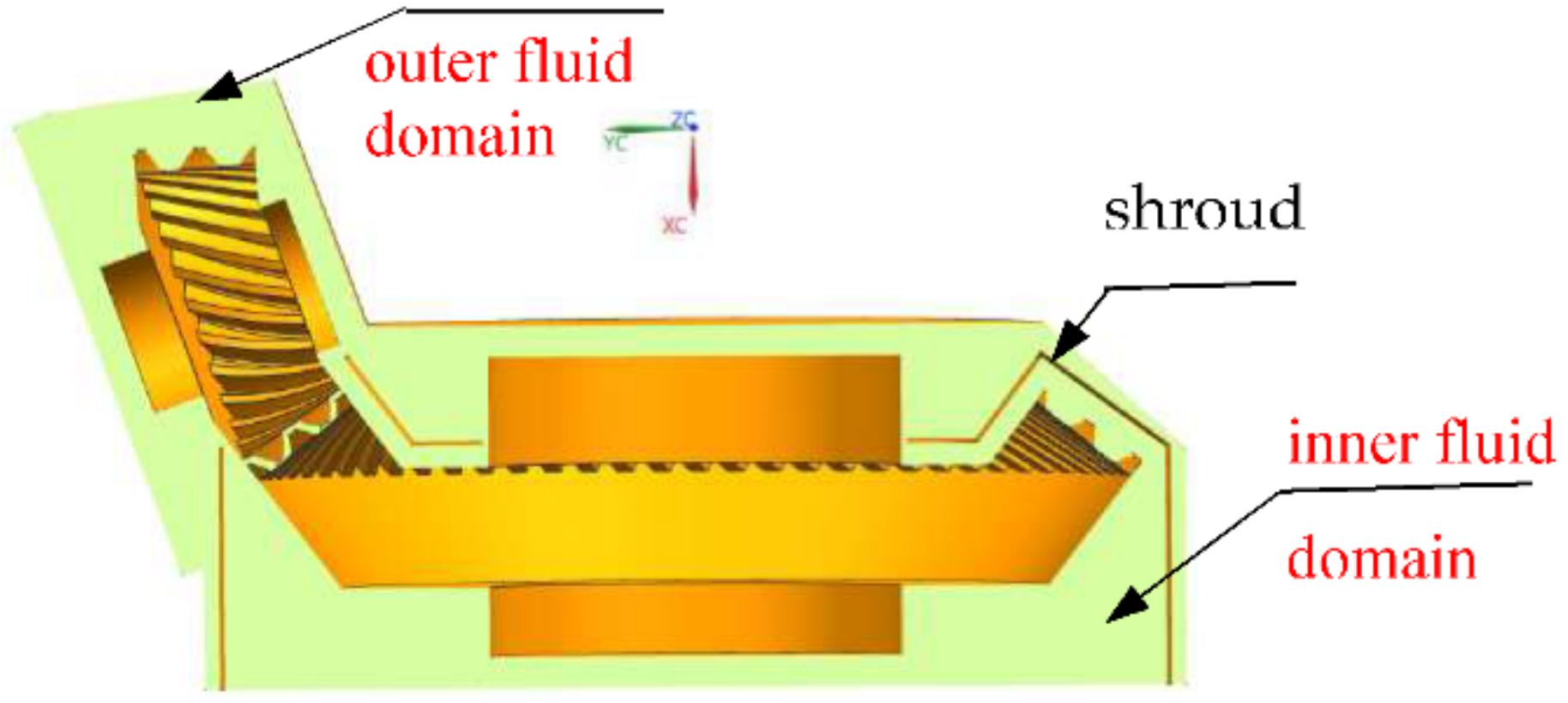
The shroud divides the fluid computing domain inside the gear box into two fluid domains, as shown in
Figure 2. During the simulation, fluid can connect the two fluid domains through the meshing opening of the shroud and the gap between the shroud and the gear shaft for material and energy exchange.
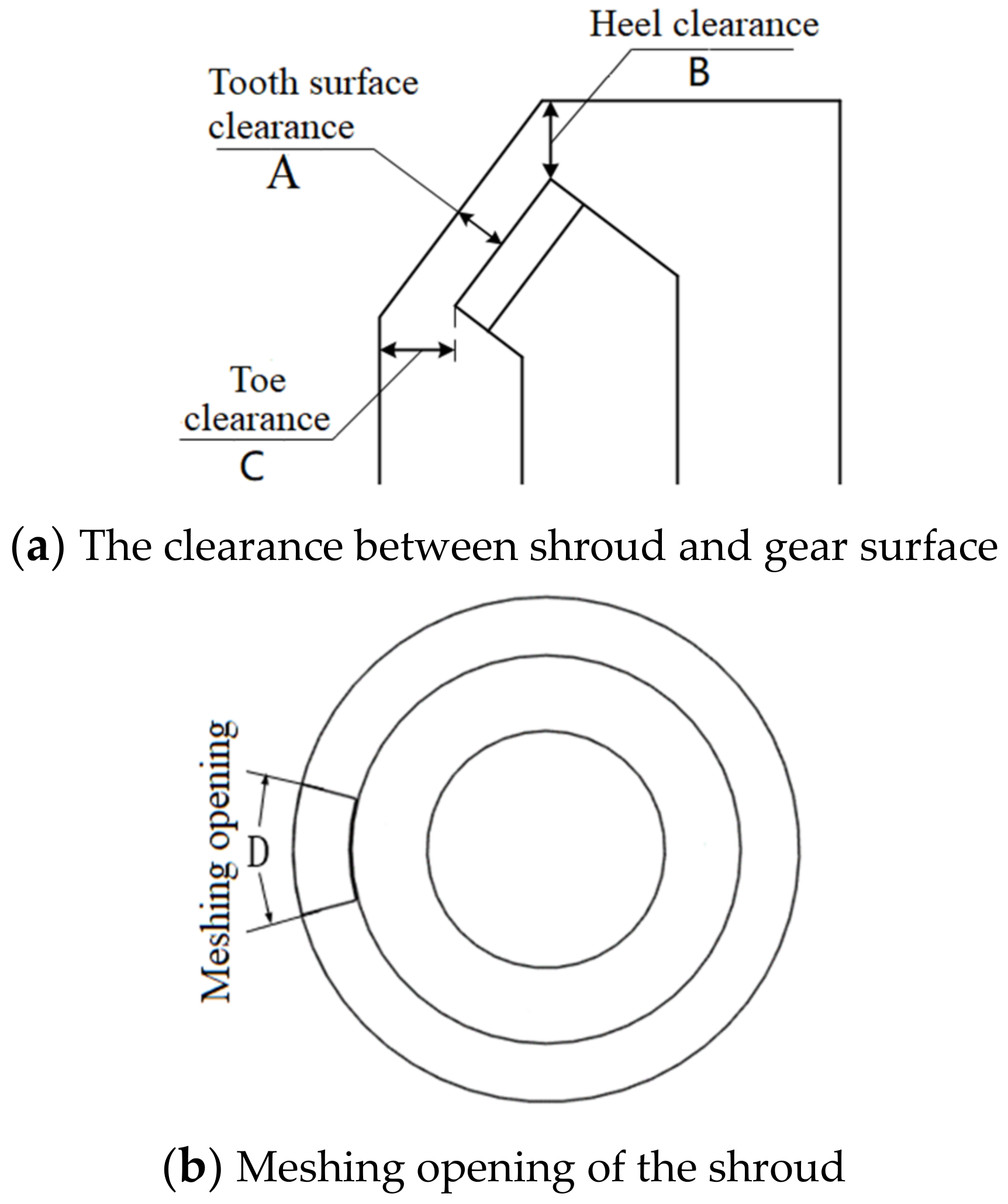
The orthogonal test can use the less representative data to analyze the influence of various factors on the test results. In orthogonal test: windage moment is the test index; the clearance between shroud and gear surface, namely tooth surface clearance (A), heel clearance (B), toe clearance (C) and meshing opening (D), are the test factors. The physical significance is shown in
Figure 10.
Variance analysis method is adopted to determine the influence of each factor. First, the fluctuation range of each factor is determined, as shown in
Table 3. Since the three clearance values are adjacent to each other in spatial structure, that is, the values of factors B and C are restricted by factor A, the correlation relationship between factors should be considered. The interaction between factor A and B is denoted as A × B, and the interaction between factor A and C is recorded as A × C, as shown in
Table 4.
The standard orthogonal table
is established, and the numerical simulation analysis of the combination of 8 groups’ factors is carried out to obtain the corresponding calculated values of windage moment, as shown in
Table 5.
Then, the windage moment values of each factor at each level are added, denoted as
Si. Then its average value is calculated and recorded as
. Finally, the range of each factor is calculated and recorded as
Rj. The influence of each factor on the test results can be obtained by arranging the range values of each factor at each level in order, as shown in
Table 6.
As shown in
Table 6, the primary and secondary order of the influence of various factors on the windage power loss of gear is B > D > A > A × B > A × C > C. The significant factors are B, D and A, that is, the heel clearance, meshing opening and the tooth surface clearance. The most significant factor is B, the interaction factors of A × B and A × C are not significant factors, and C is the least significant factor. The optimal level of each factor is 2. In other words, the smaller the clearance between the shroud and the gear and the smaller the meshing opening of the shroud, the smaller the windage loss.
5.3. Optimization Design of the Shroud Geometry Structure
By comparing
Table 2 and
Table 5, it can be seen that the minimum windage moment of the gear is reduced by about 57% after adding the shroud. The existing research data show that for a single gear, the shroud with the best effect can reduce windage power loss by 70~75% [
19]. Therefore, it is necessary to study the optimal structural parameters of the shroud by analyzing the mechanism of reducing the windage loss of the shroud.
The meshing opening size of the shroud is mainly affected by the geometrical structure parameters of the two meshing gears, and the minimum opening value is the minimum space value that meets the normal meshing of the gear pair. The optimum clearance value between the shroud and a gear can be obtained by optimization design. In order to make the calculation results comparable, the windage moment obtained from the orthogonal test is dimensionless, and the dimensionless coefficient
Cm of the moment is obtained by the following formula [
10]:
where
T, Ω and
r have the same meaning as in Equations (12) and (13);
ρ is the fluid density.
The least-square method is used to fit the functional relationship between the dimensionless coefficient of windage moment and the clearance between the shroud and a gear. It is assumed that the variables of the tooth surface clearance value, the heel clearance value and the toe clearance value are
x1,
x2 and
x3, respectively. The polynomial function is fitted by the nonlinear regression method of MATLAB, and the expression of
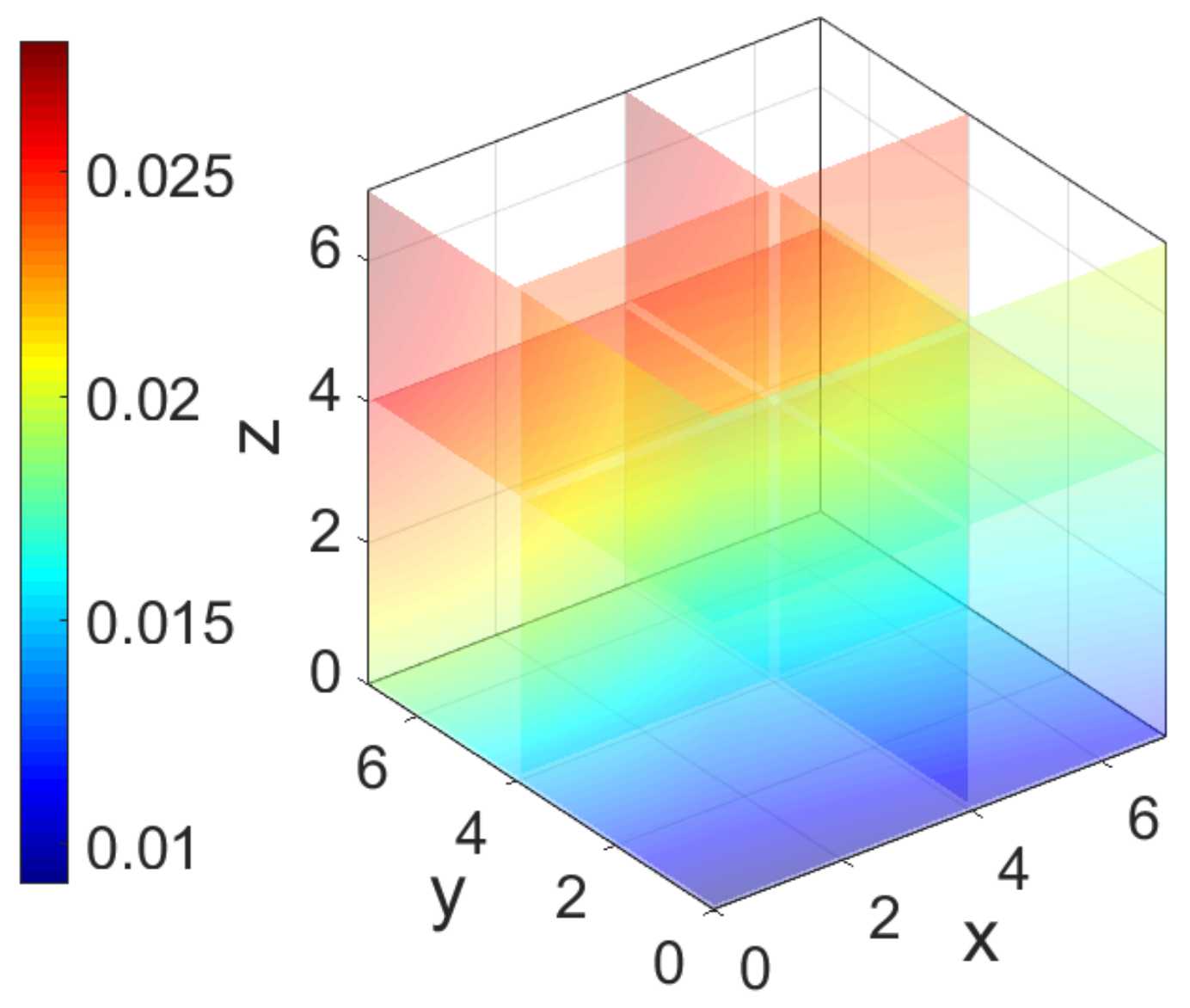
Cm is obtained as follows:
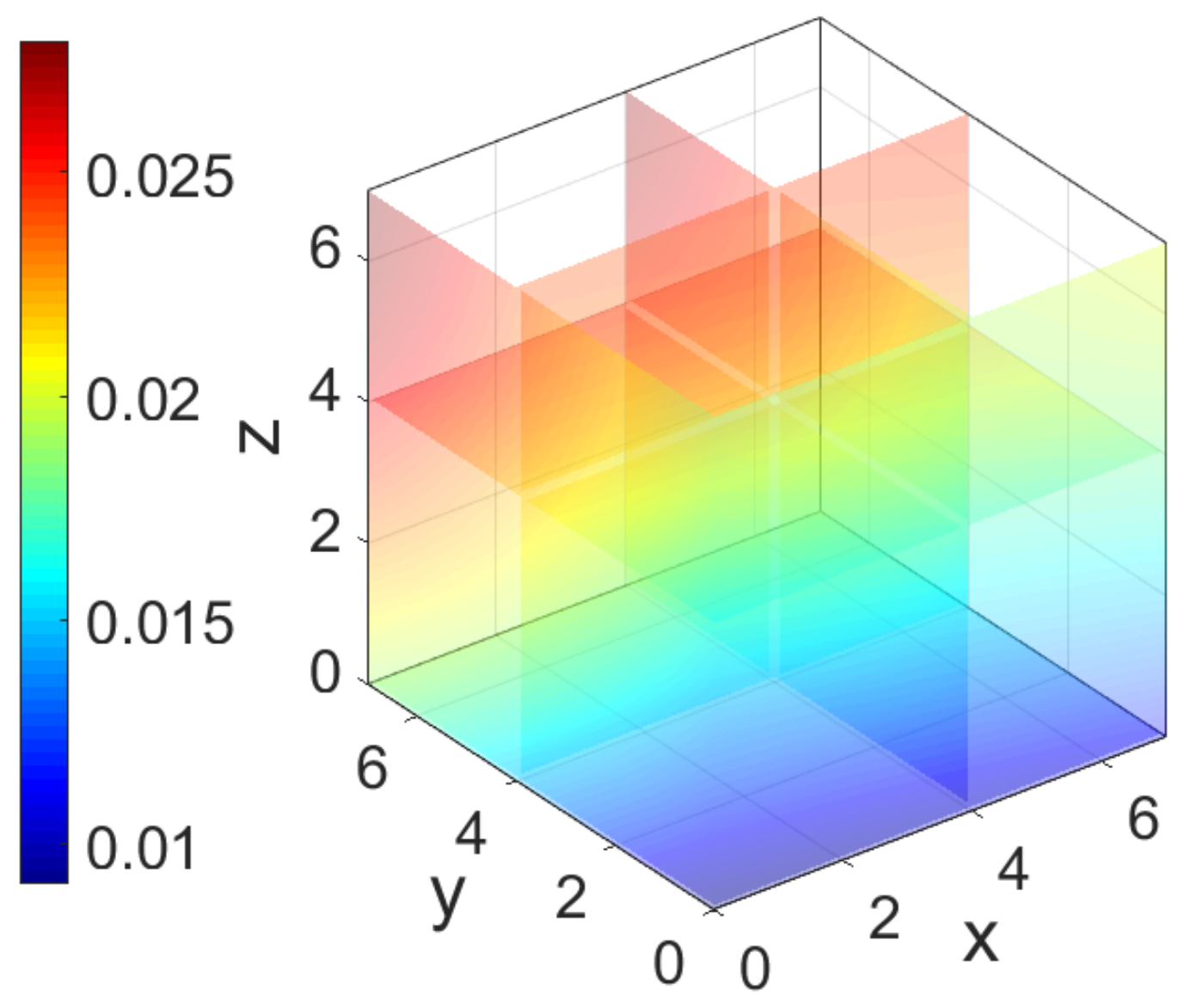
In order to display the change in function values with variables more intuitively, Matlab slice graph is used to describe the four-dimensional graph of the fitting function, as shown in
Figure 11.
The fitted polynomial function is optimized. According to the actual size of the gearbox space, this paper sets the maximum value of the clearance value (x1, x2, x3) to 7 mm. The optimization problem of this test is converted to the following mathematical problems:
Optimization variables: X = [x1, x2, x3]
The objective function is:
Solving the above optimization mathematical problems, the optimization result of the objective function is obtained as follows:
When
x1 = 3.74 × 10
−4,
x2 = 5.18 × 10
−5 and
x3 = 3.55 × 10
−5, the minimum value of objective function is:
In summary, when the clearance values x1, x2 and x3 are close to 0 mm, the dimensionless moment coefficient is the smallest, that is, the windage power loss is the smallest. In other words, the smaller the clearance between the shroud and the gear, the smaller the windage power loss and the better the effect of reducing the windage power loss.
Therefore, it can be seen that the geometry structure of the shroud makes the spatial volume around the rotating gear smaller, the clearance between the shroud and a gear is smaller, the air flow between the teeth is lower, the turbulent kinetic energy of the fluid is lower, and the energy dissipation caused by the energy dissipation is lower, that is, the windage power loss of gear is the lowest. However, if the clearances between the shroud and the gear are too small, when the gear speed is very high, even if the stiffness of the shroud itself is very great, the gear will also absorb the shroud to the bottom of the gear. Consideration should be given to the influence of axial displacement caused by vibration during the gear rotation, errors in manufacturing and installation of shroud, deformation of shroud and the amount of lubricating oil required for gear cooling and lubrication. Combined with the actual working conditions, the stiffness of the support parts, the transmission power of the gear, the material properties and the existing manufacturing technology and according to practical experience, the minimum value is about 1 mm and the meshing opening is 30°. This is more in line with the engineering application than the references [
4,
16,
18].
5.4. Windage Reduction Mechanism of Shroud
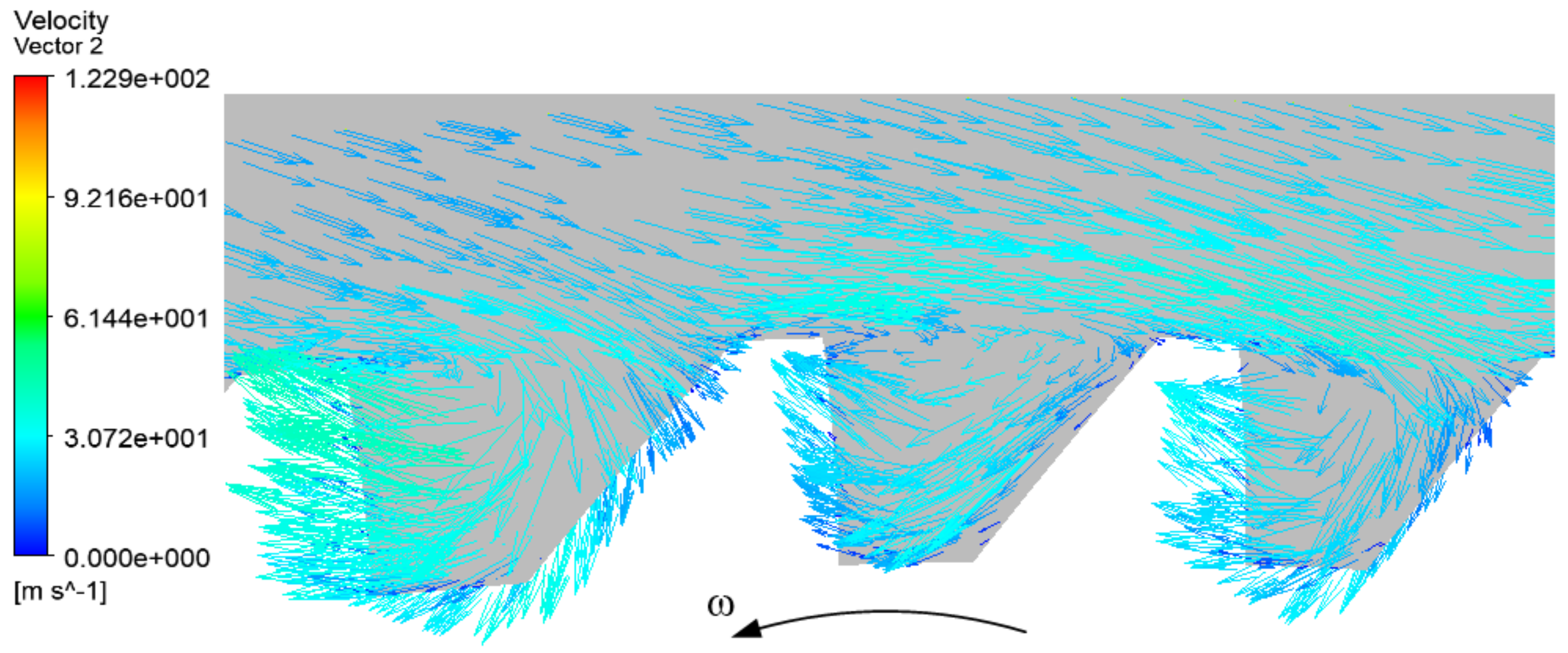
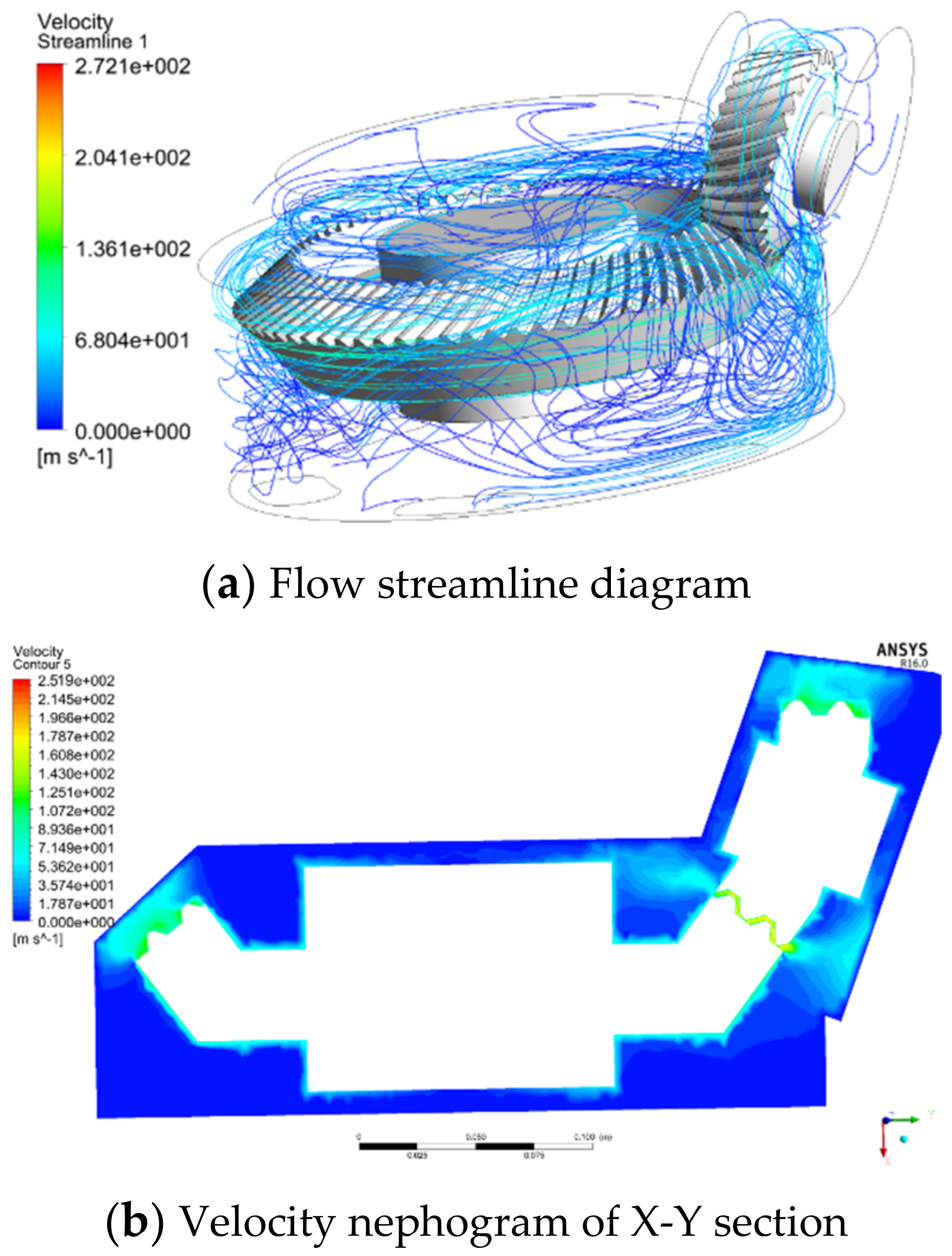
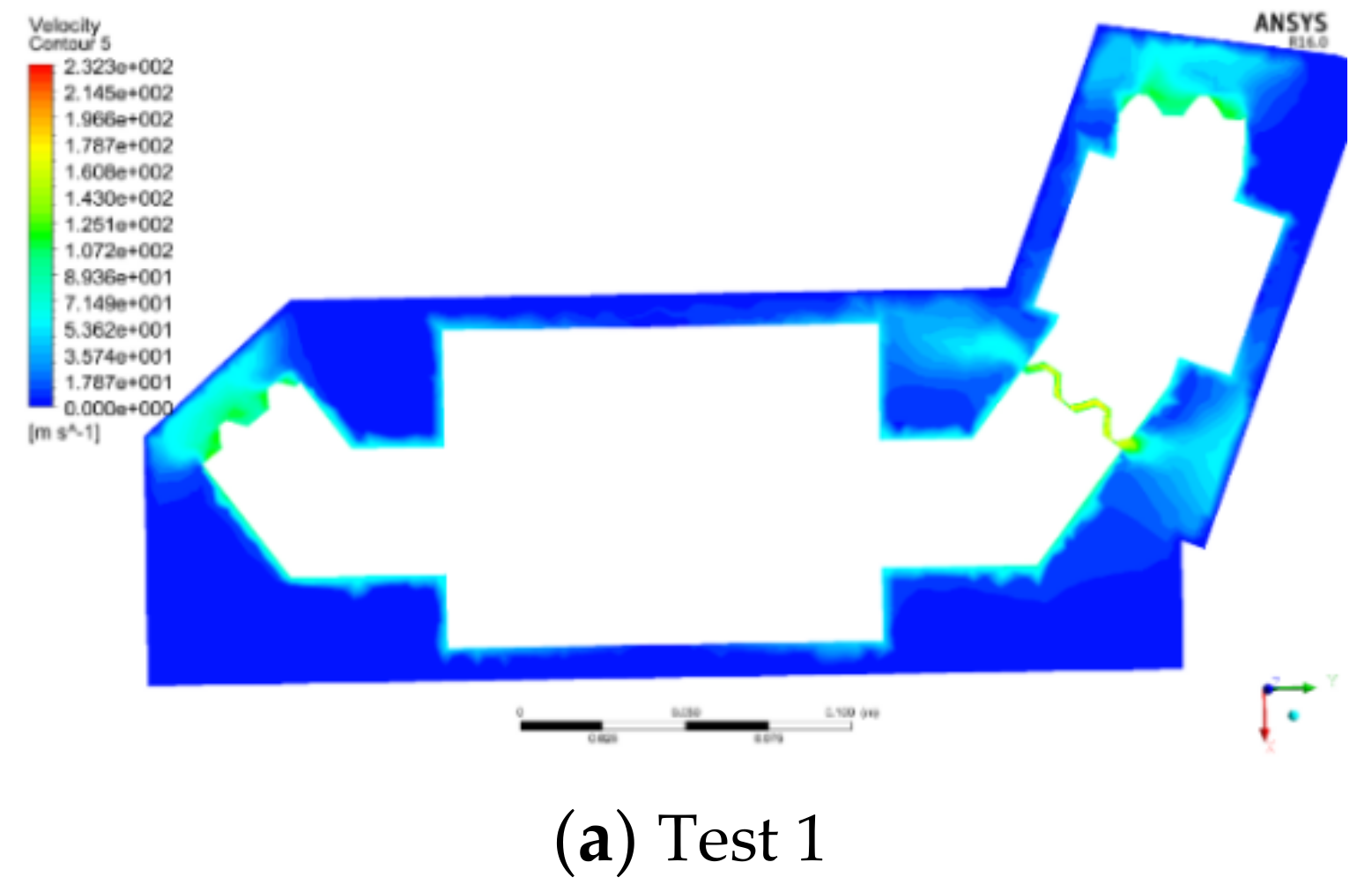
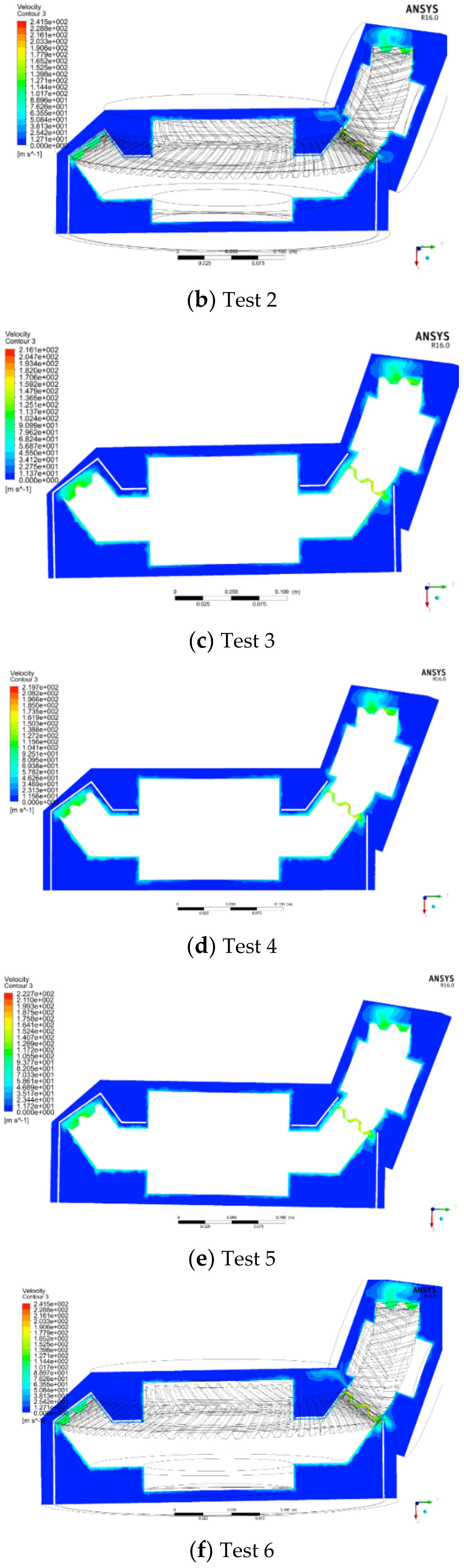
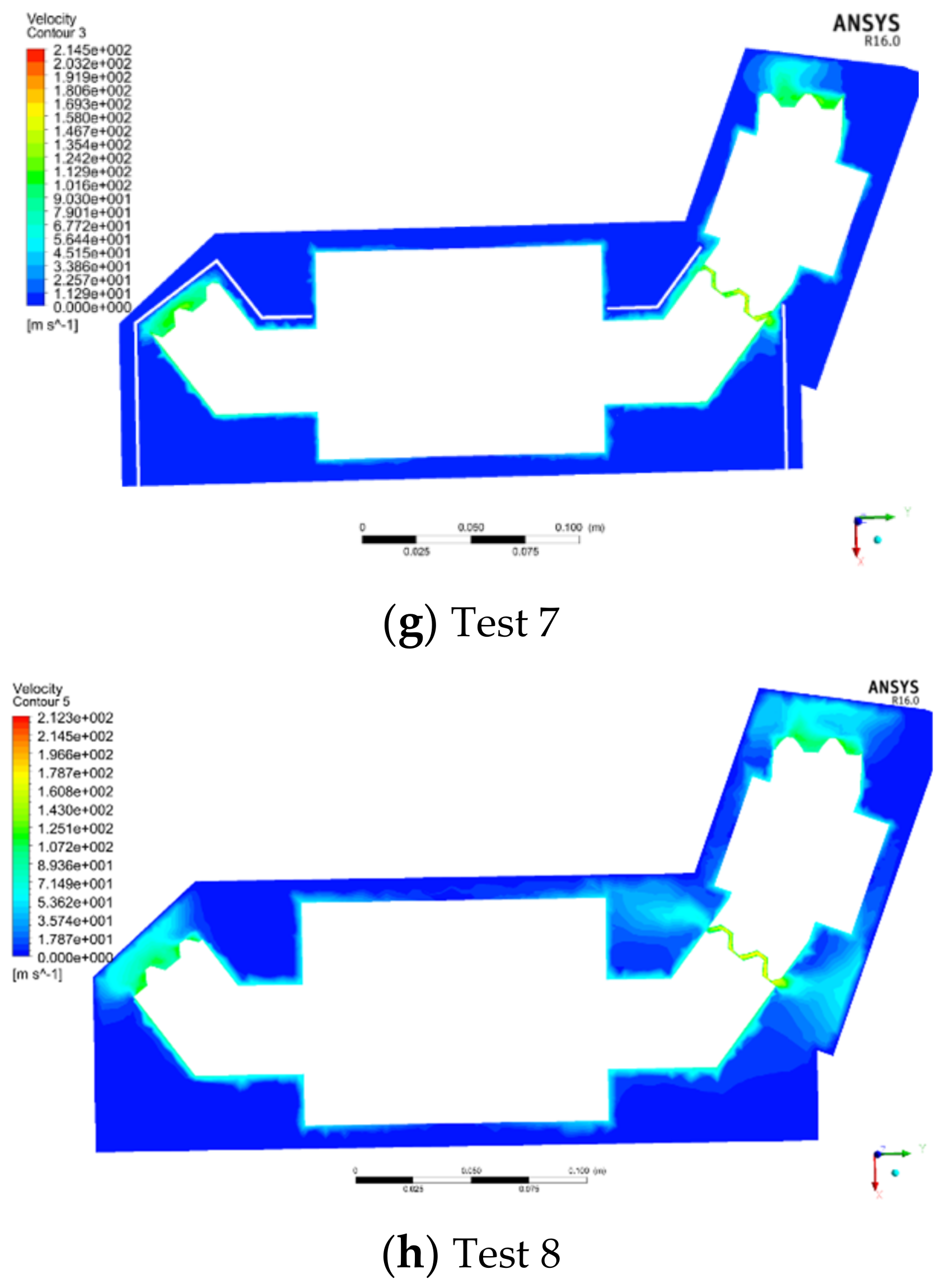
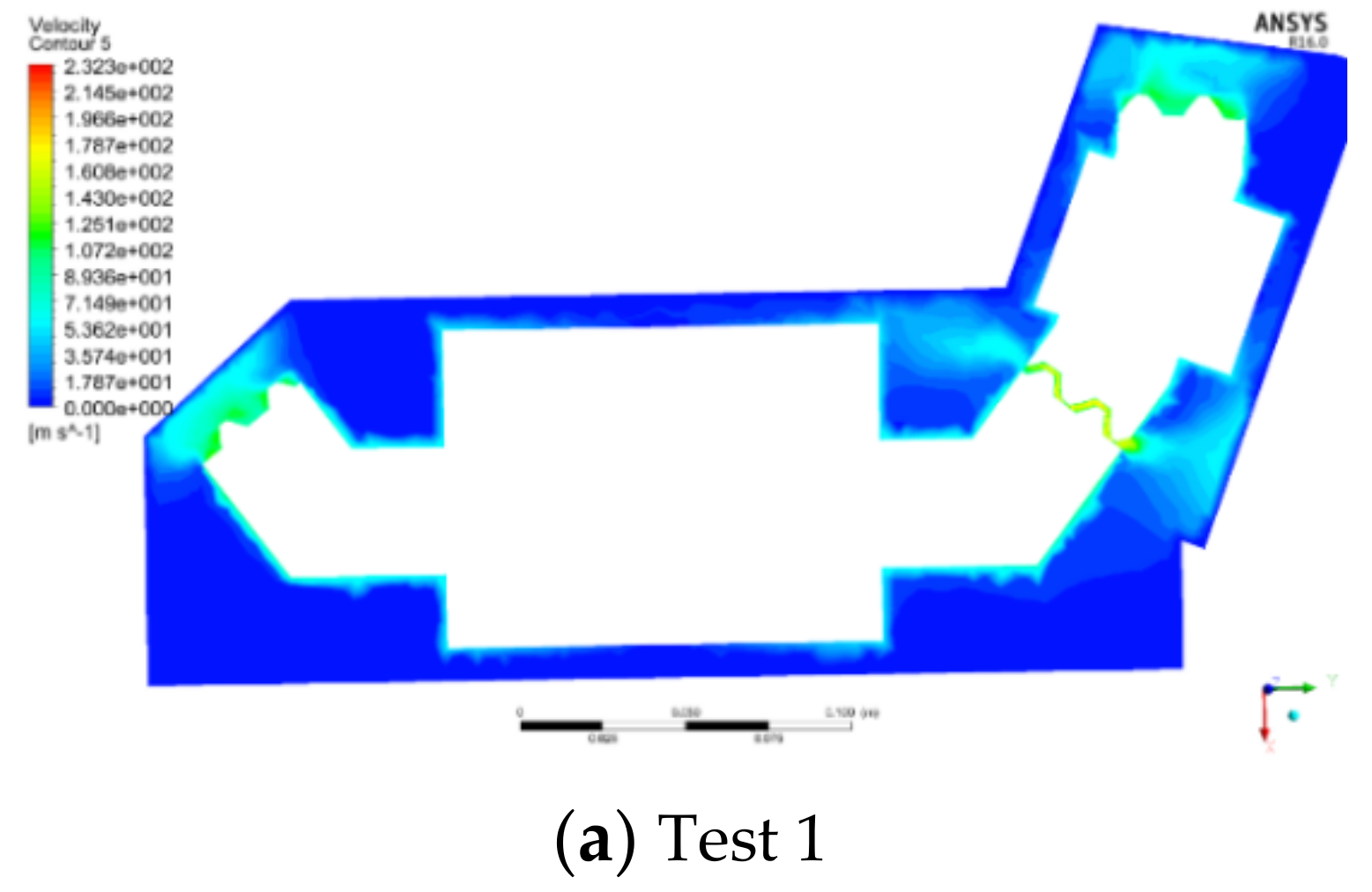
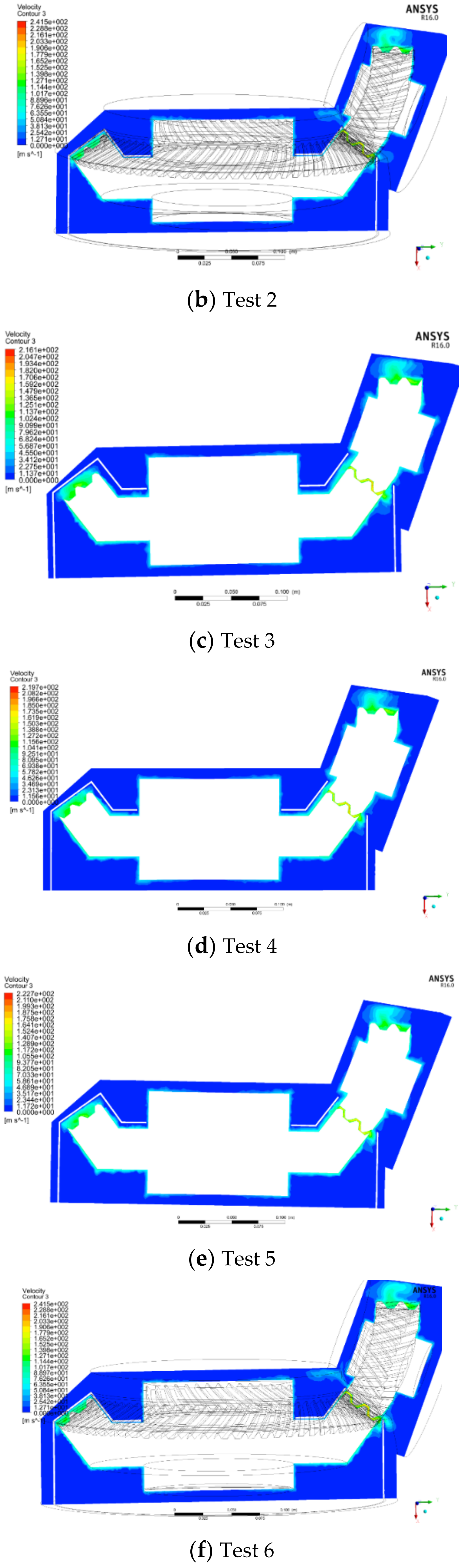
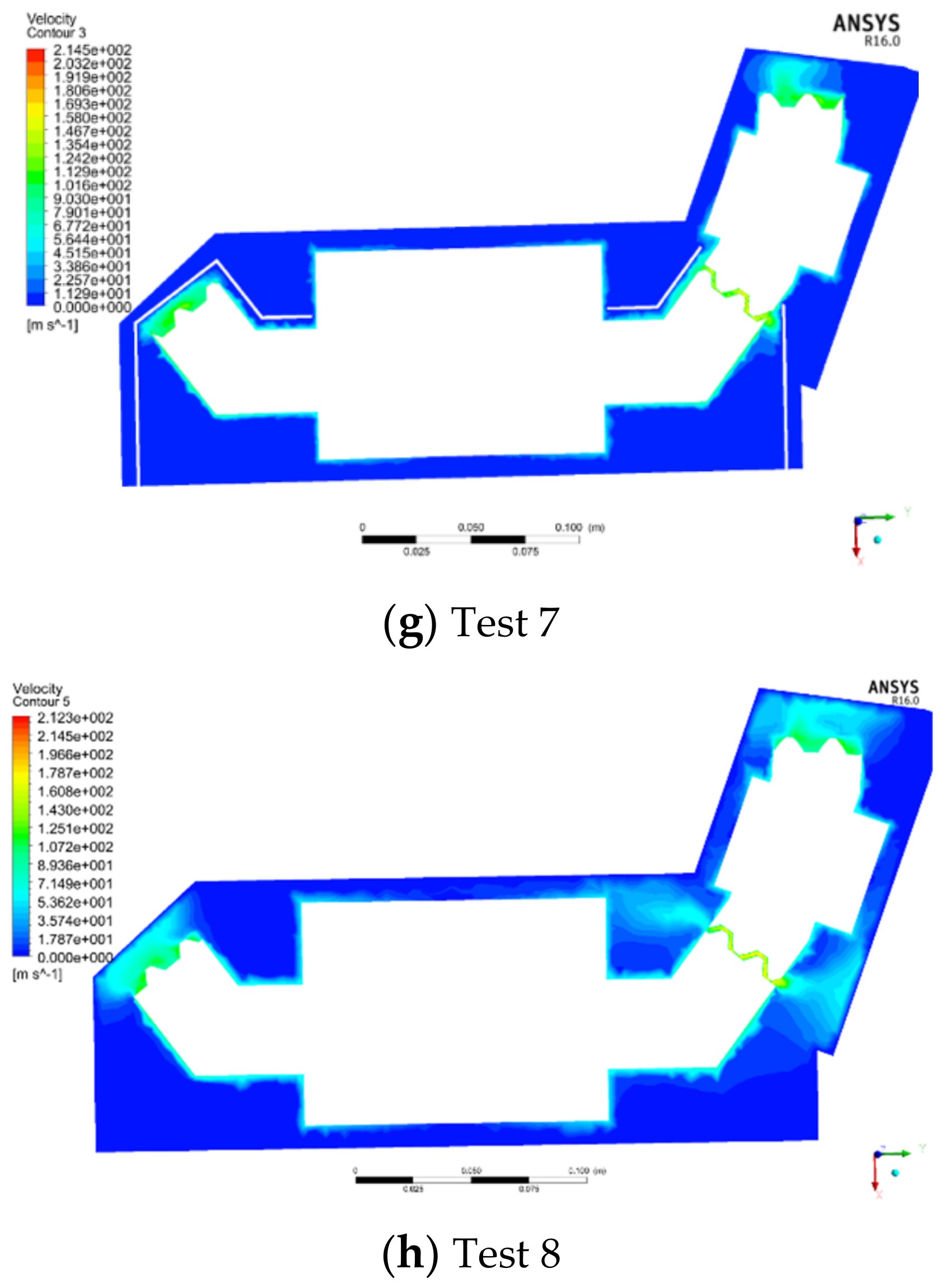
Eight groups of simulation analysis results of orthogonal test are taken as examples to study the windage reduction mechanism of the shroud. The fluid velocity field distribution inside the gearbox is shown in
Figure 12.
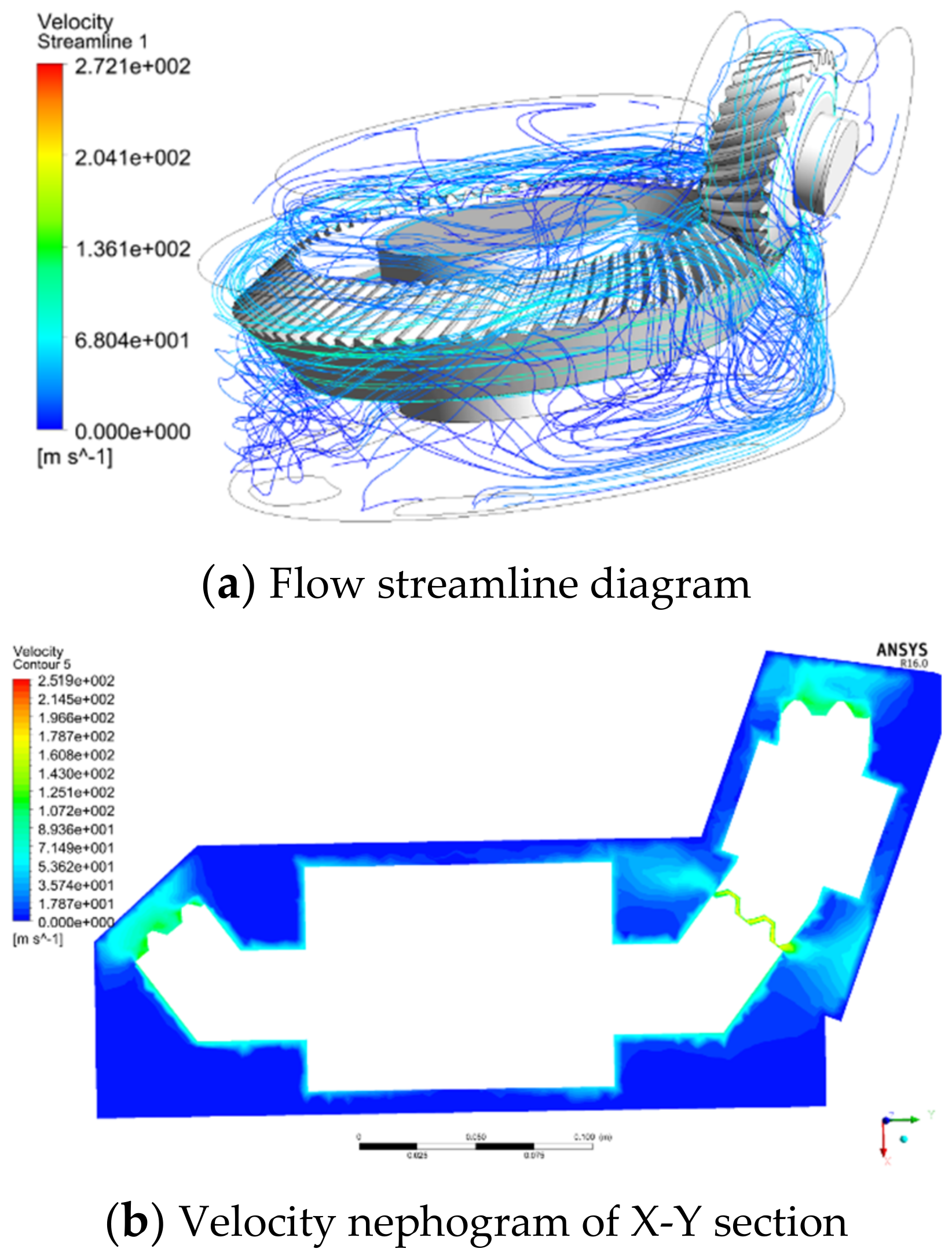
Compared to
Section 3.3, it can be seen that after installing the shroud, the air velocity in the fluid domain between the shroud and a gearbox decreases significantly. The air in the outer fluid domain enters into the inner fluid domain through the meshing opening of the shroud and the clearance between the shroud and the gear shaft surface, and then the air rotates with the gear and moves continuously towards the heel of the gear along the contour. At this time, part of the air re-enters the outer fluid domain from the meshing area of the gear pair. Therefore, there must be continuous exchange of material and energy between the internal and external fluid regions.
The turbulent kinetic energy is estimated by turbulence intensity and average velocity. According to [
31], the calculation method is:
where
k is the turbulent kinetic energy,
I is the turbulence intensity,
U is the average velocity and
Re is the Reynolds number.
According to [
31], the calculation method of turbulent dissipation rate is:
where
ε is the turbulent dissipation rate,
l is the turbulent scale, C
μ is the empirical constant and
L is the characteristic length, which in this case is the radius of the gear.
The turbulent kinetic energy and turbulent dissipation rate of the fluid domain can be obtained by the calculation of fluent post-processing. The volume, turbulent kinetic energy and turbulent dissipation rate of the fluid domain in the orthogonal test are shown in
Table 7.
The turbulent kinetic energy represents the intensity of the turbulent motion inside the gear box. The turbulent dissipation rate represents the amount of the fluid kinetic energy lost due to the turbulent motion of the oil–air mixture. As shown in
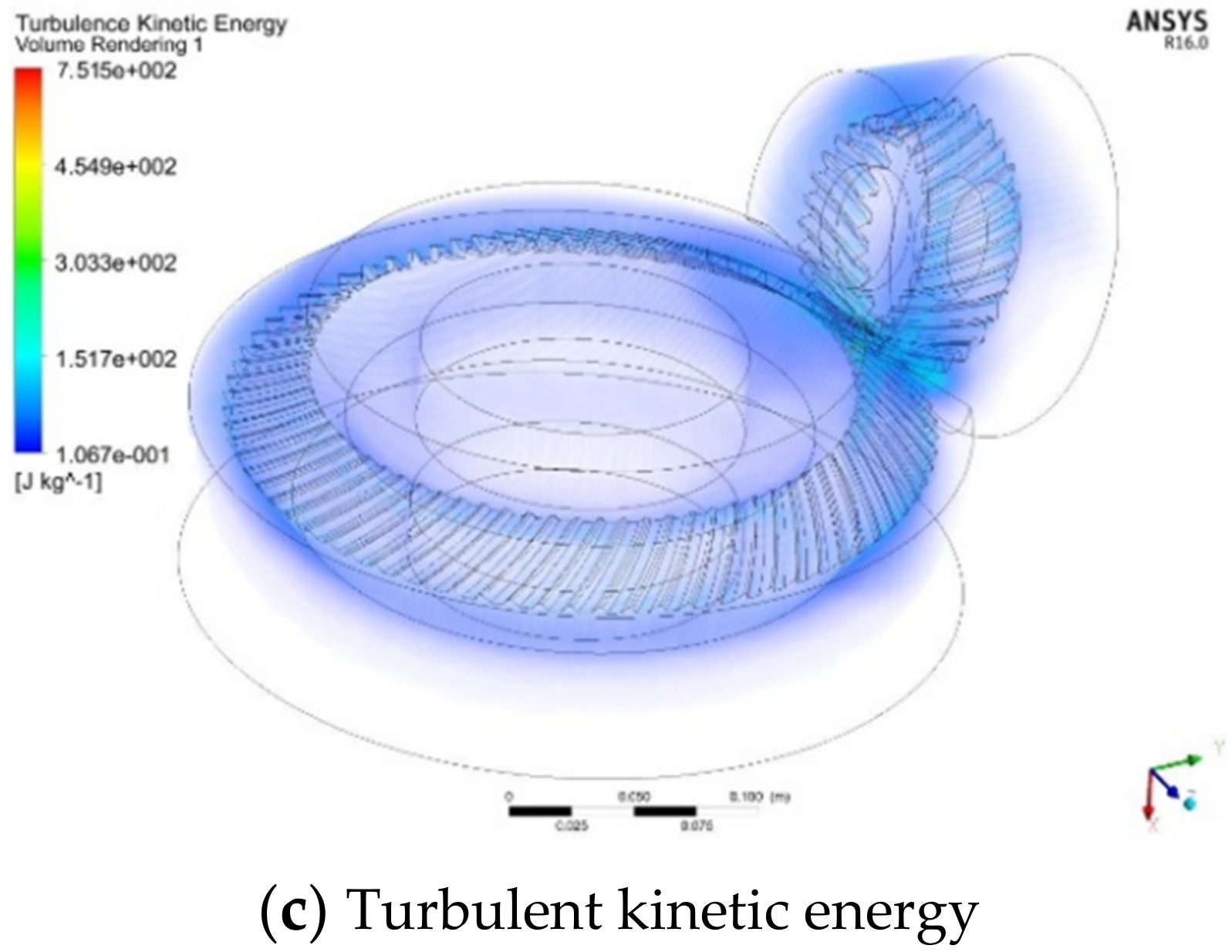
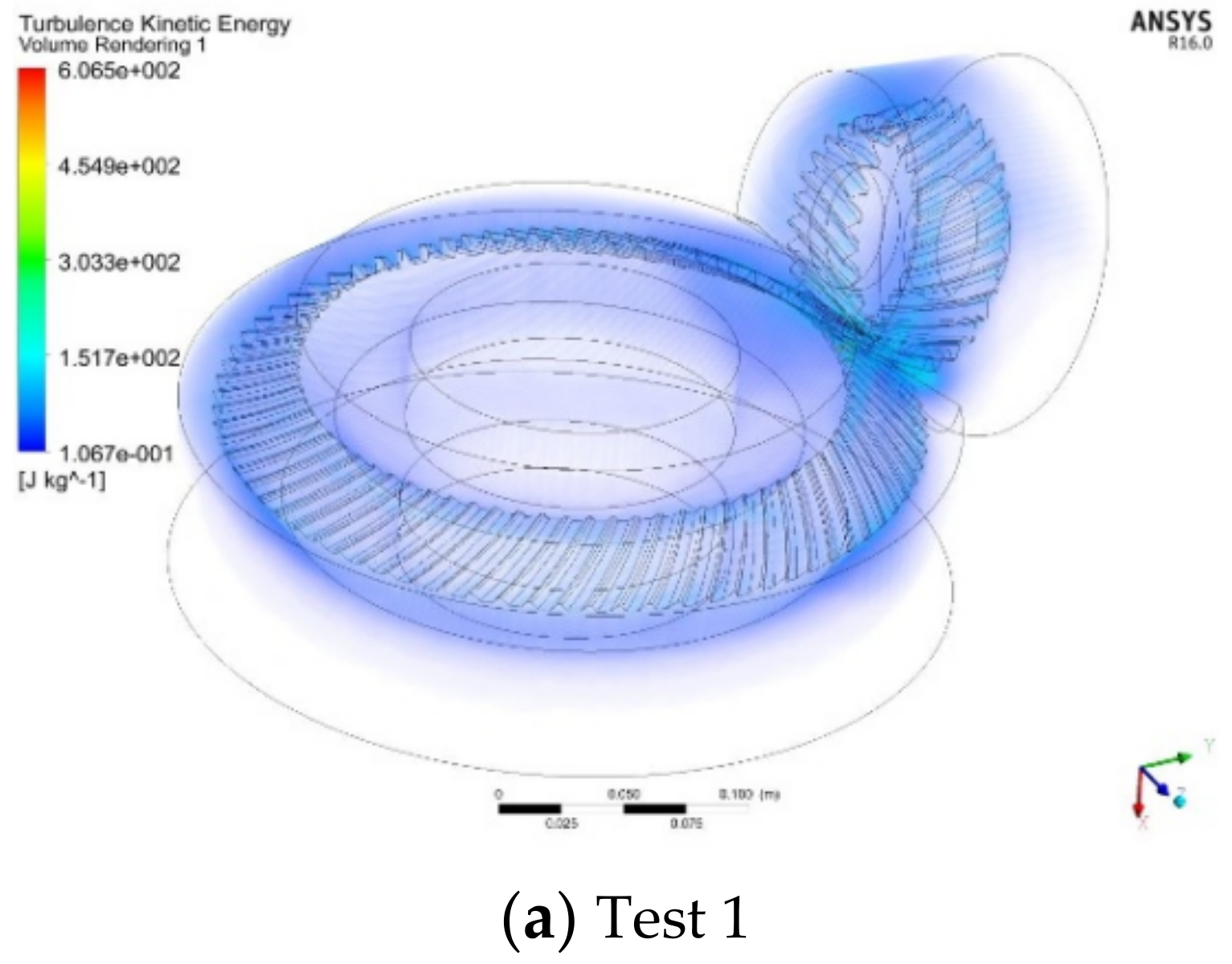
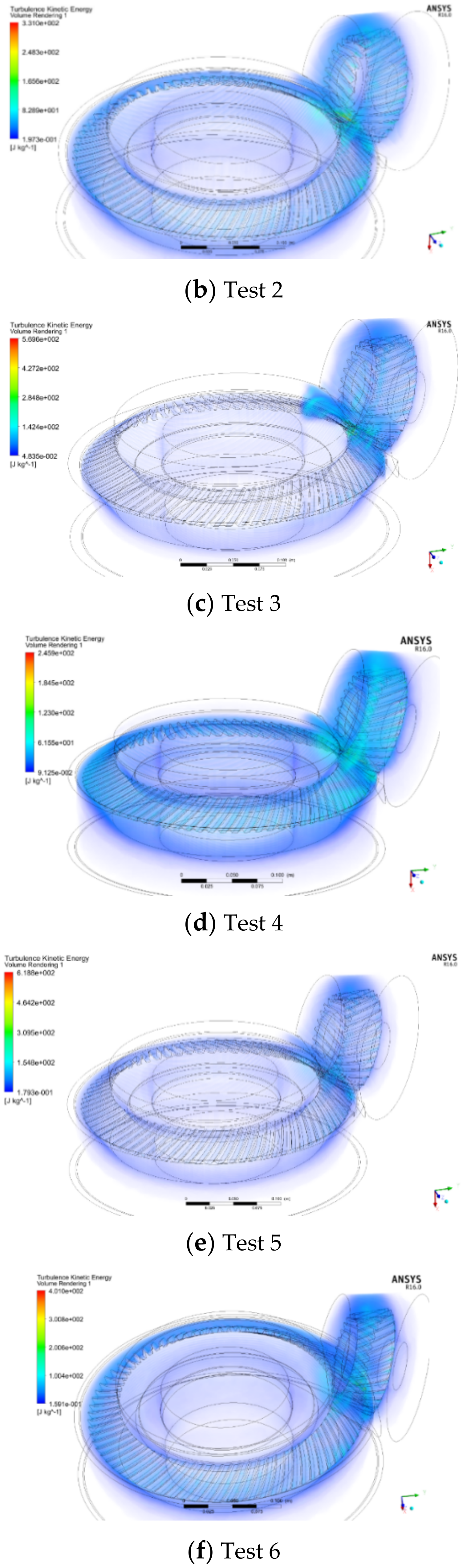
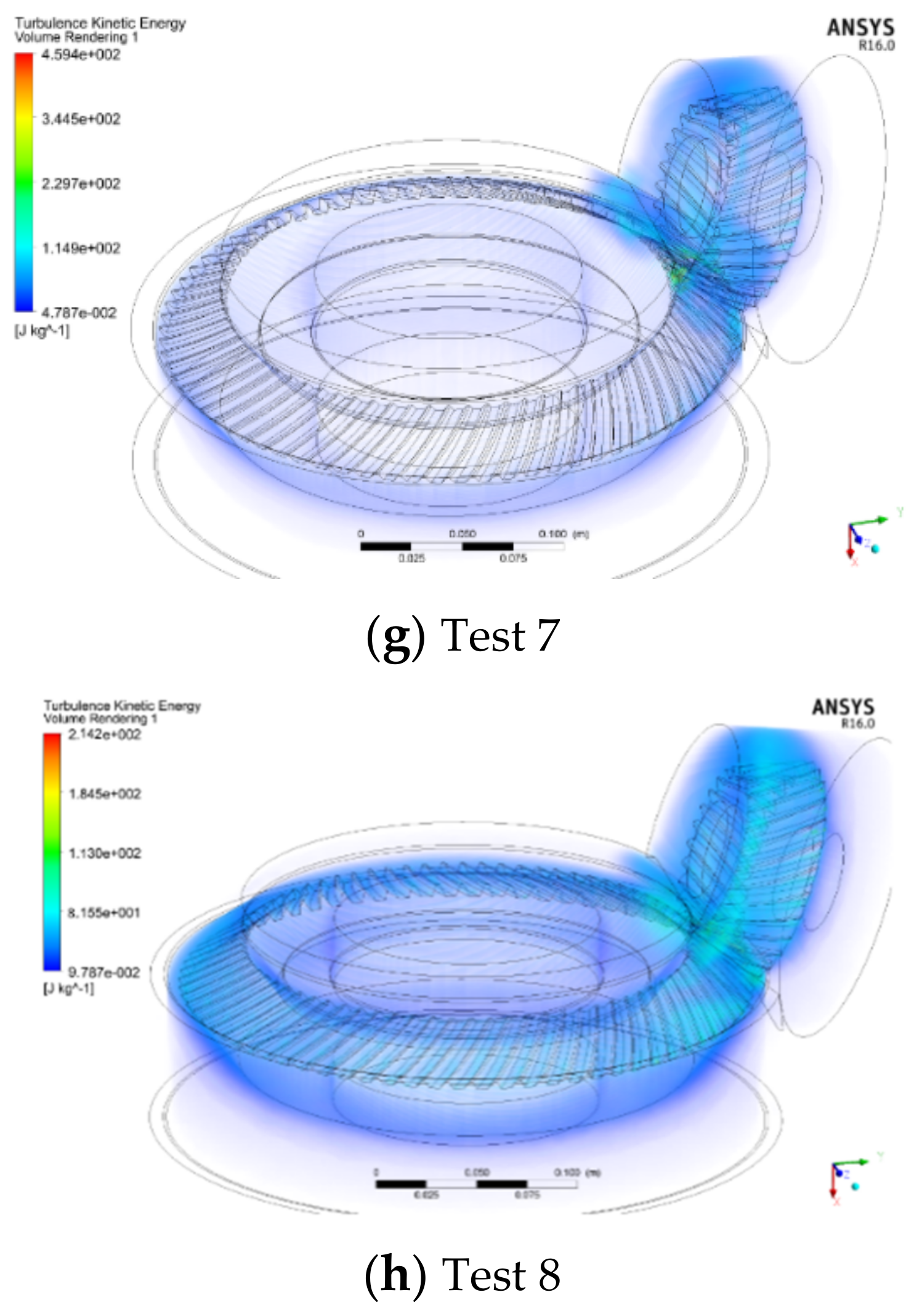
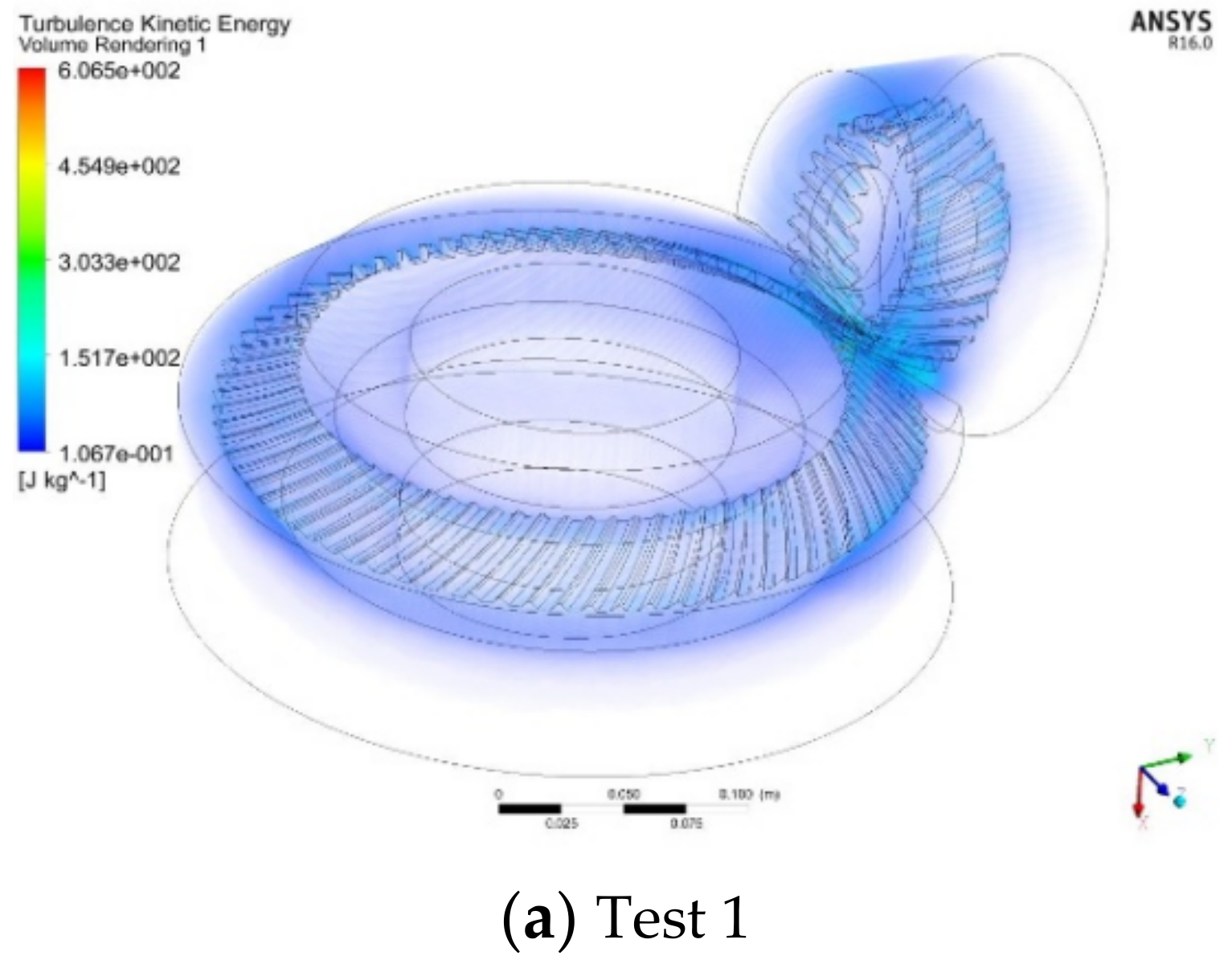
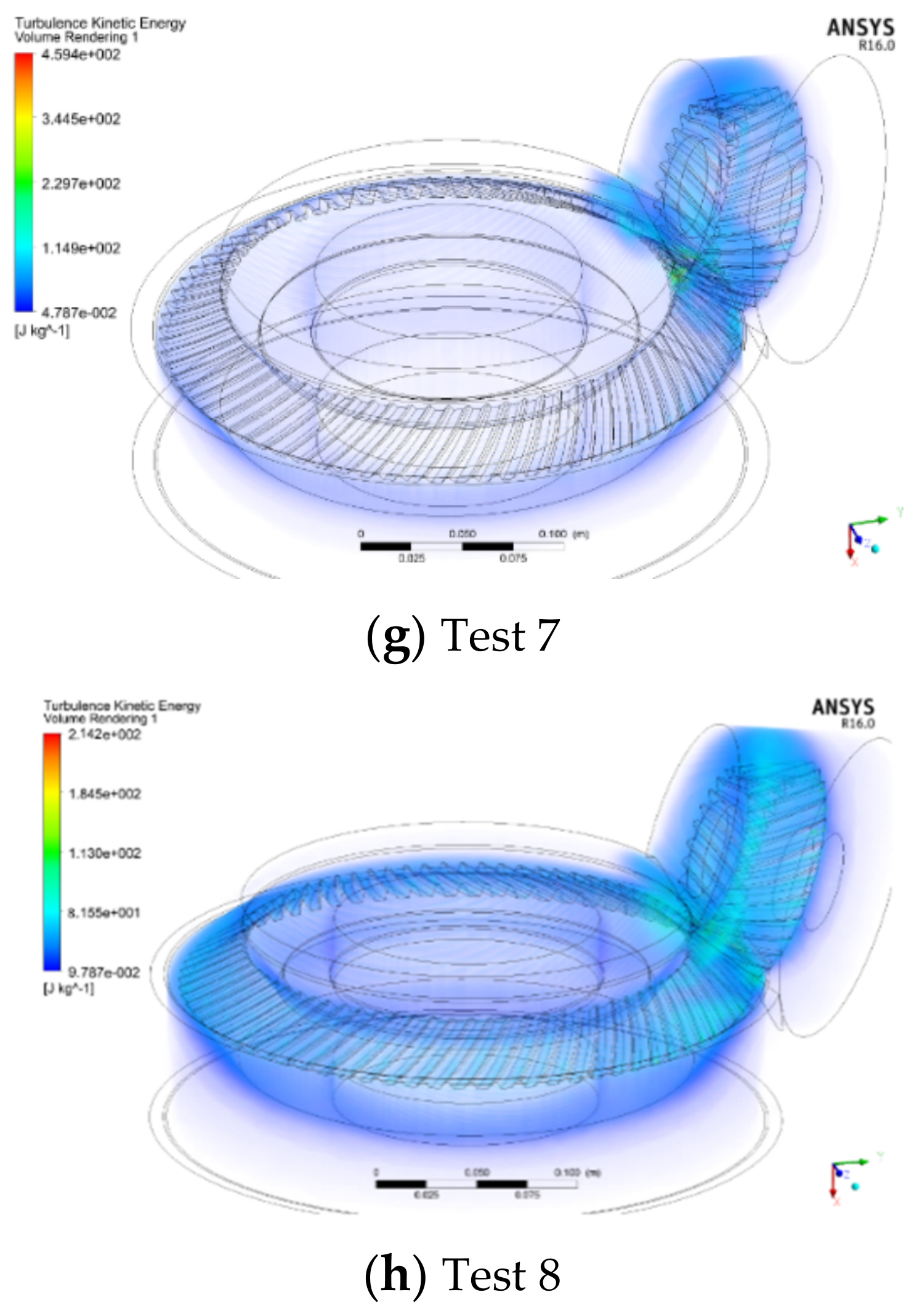
Table 7, the turbulent dissipation rate of the outer fluid domain is more than twice that of the inner fluid domain under the same test number. The turbulent kinetic energy of the outer fluid domain is much greater than that in the inner fluid domain. The turbulent motion of the outer flow domain is more intense than that of the inner fluid domain, but the fluid velocity in the inner fluid domain is higher, and it is the source of kinetic energy of the outer flow domain. Therefore, reducing the volume of the inner fluid domain means reducing the kinetic energy source of the fluid of the outer flow domain, so as to reduce the velocity of the fluid in the outer flow domain. In the simulation results of orthogonal testing, the turbulent flow energy distribution in the gearbox is shown in
Figure 13.
With the continuous reduction of the clearance between the shroud and the gear, the average turbulent kinetic energy of the flow field near the gear surface decreases accordingly, as shown in
Figure 13. This is because when the air in the inner fluid domain obtains kinetic energy from the gear, the shroud reduces the turbulent kinetic energy of the air in the inner fluid domain, reduces the pressure and viscous force acting on each surface of the gear and finally reduces the windage loss of the gear. At the same time, it can be seen that in all the tests, the turbulent kinetic energy near the meshing region is the greatest in the whole flow field, which is caused by the complex boundary movement and energy exchange in the meshing region.
In summary, when the volume of the inner fluid domain is constant, the larger the meshing opening of the shroud, the greater the gear windage loss. The turbulent kinetic energy and turbulent dissipation rate of the inner and outer fluid domains decrease with the decrease in the volume of the inner fluid domains when the meshing openings of the shroud are the same. This means that with the reduction in the volume of the inner fluid domain, the sum of the turbulent motion of the inner and outer fluid domain becomes less intense, which reduces the kinetic energy of the fluid loss in the turbulent motion, so as to reduce the windage loss.
The energetic mechanism of the shroud reducing the windage loss can well explain the variance analysis results of the data in References [
7,
8,
17]: the heel clearance is the most significant factor affecting the gear windage loss, because compared to other parameters, reducing the unit heel clearance can reduce the volume of the internal fluid domain most. The toe clearance is not a significant factor, because when the unit toe clearance is reduced, the volume of the internal fluid domain decreases the least.
5.5. Structural Optimization Design Principle of Shroud
According to the windage reduction mechanism of the shroud, the following structural optimization design principles of the shroud are obtained:
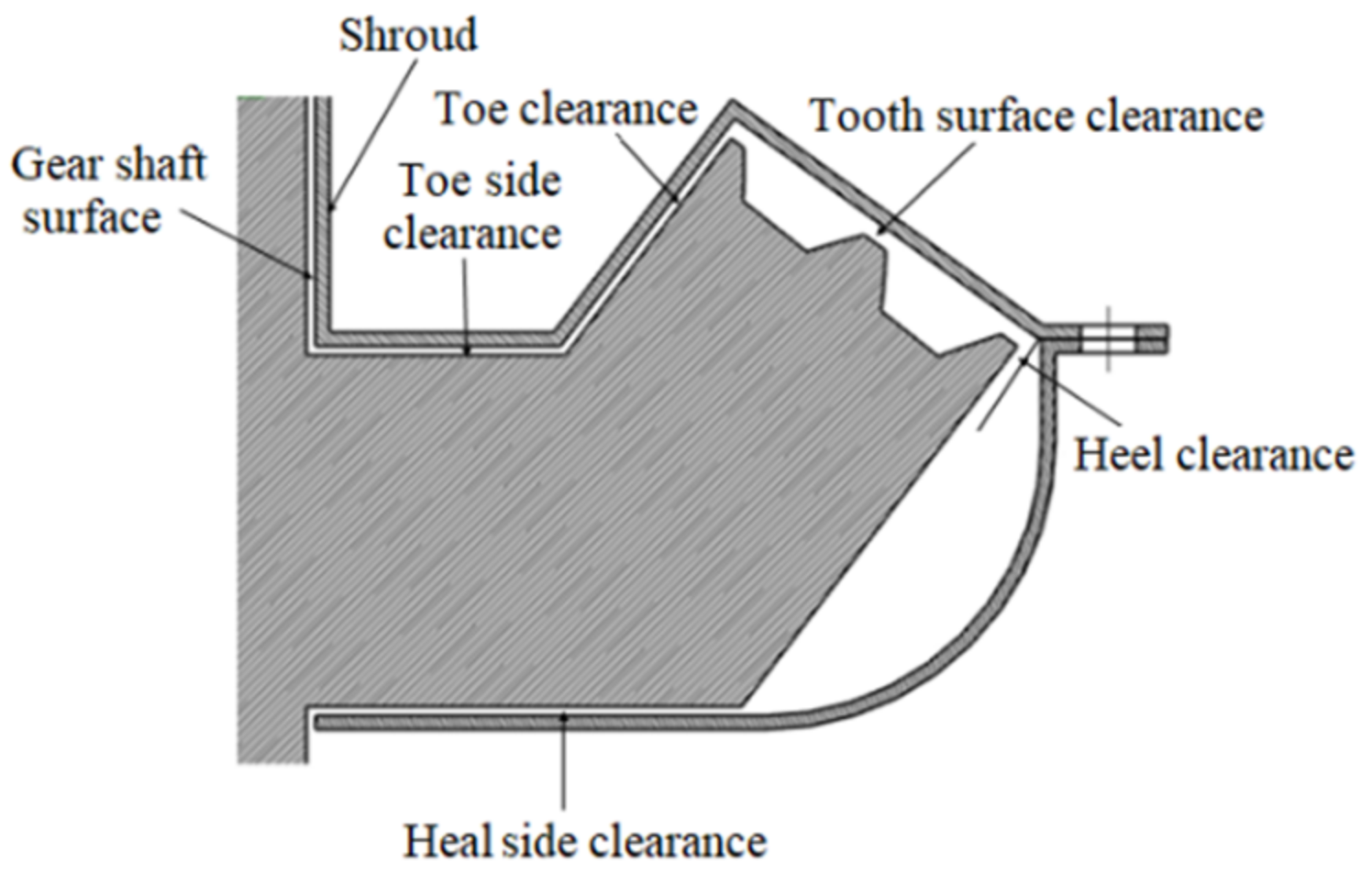
(1) Shroud should minimize the effect of axial and radial pumping fluid by gears, that is, minimize the distance between the shroud and gear profiles, so that the volume of fluid domain directly affected by gear rotation can be reduced. The specific measures that can be taken include reducing the tooth surface clearance, heel clearance and toe clearance. If the manufacturing process and installation conditions allow, the clearance between the shroud and the gear shaft surface, heel side and toe side can also be reduced. The significance of the clearance is in
Figure 14, which shows a sectional view of a gear with shroud.
(2) The mass and energy exchange between the inner and outer fluid domains separated by the shroud should be reduced as much as possible. Specific measures can be taken to reduce the area of the connecting surface between the two fluid domains, such as reducing the size of the meshing opening of the shroud and the clearance between the shroud and the upper shaft surface and so on.
6. Conclusions
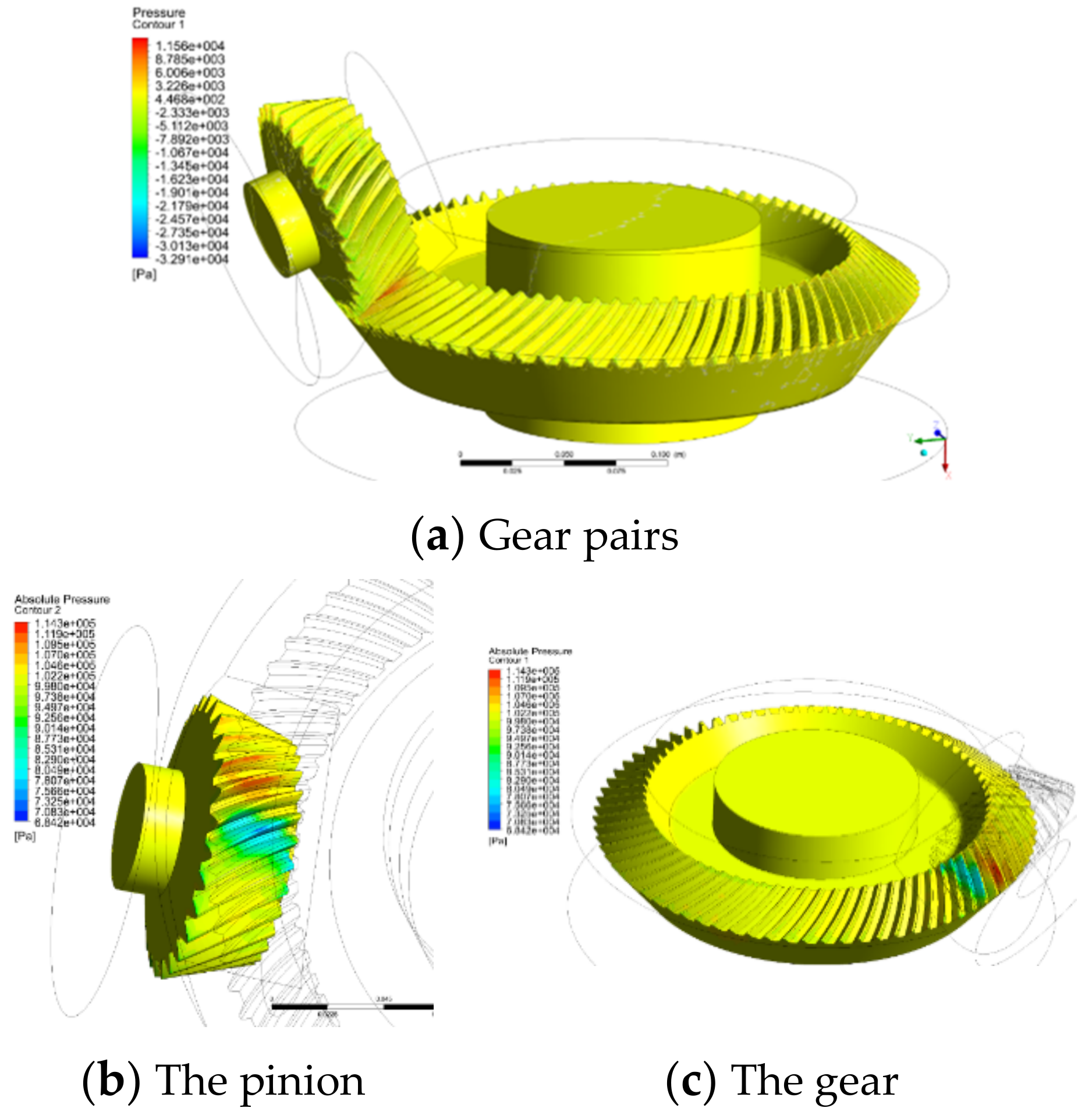
(1) This paper has presented a methodology for evaluating windage for a pair of shrouded spiral bevel gears using a parametric solid 3-D model. The distribution trend of velocity field and pressure field around the gear obtained by simulation in this paper is consistent with the experimental results of references [
1,
5,
10].
(2) The goals of this work have been to validate the numerical and modeling approaches used for these applications and to develop physical understanding of the aerodynamics of gear windage loss.
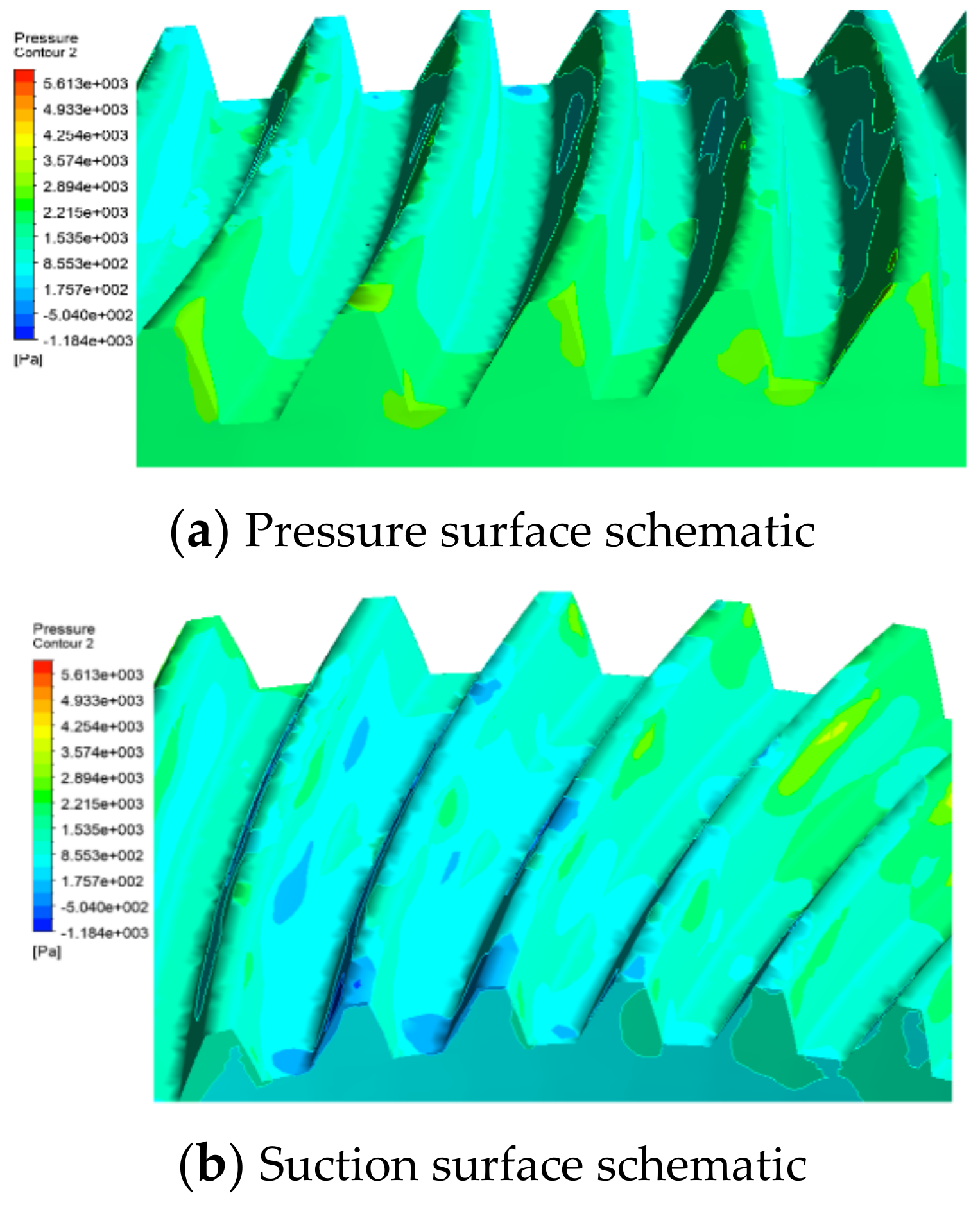
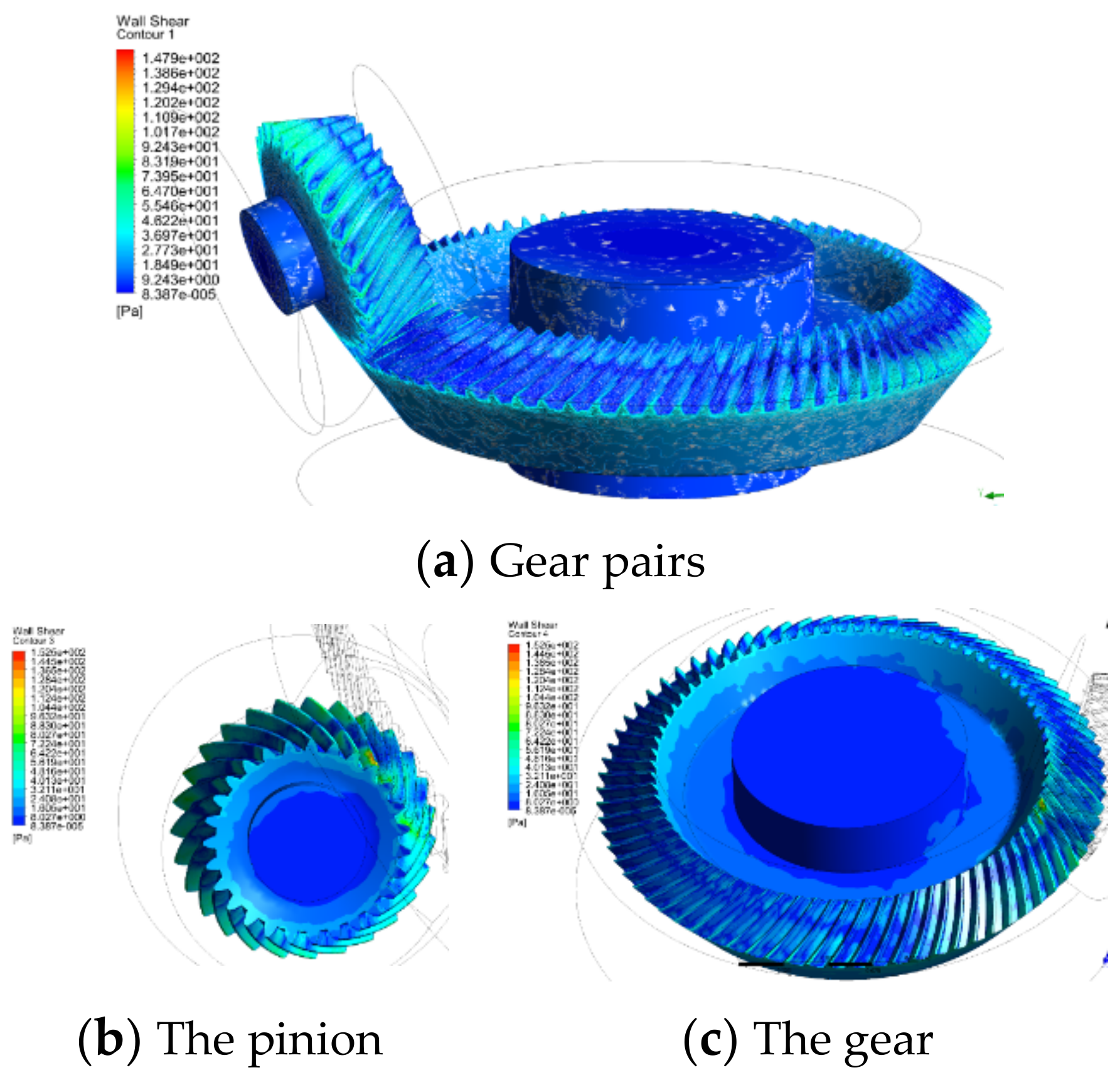
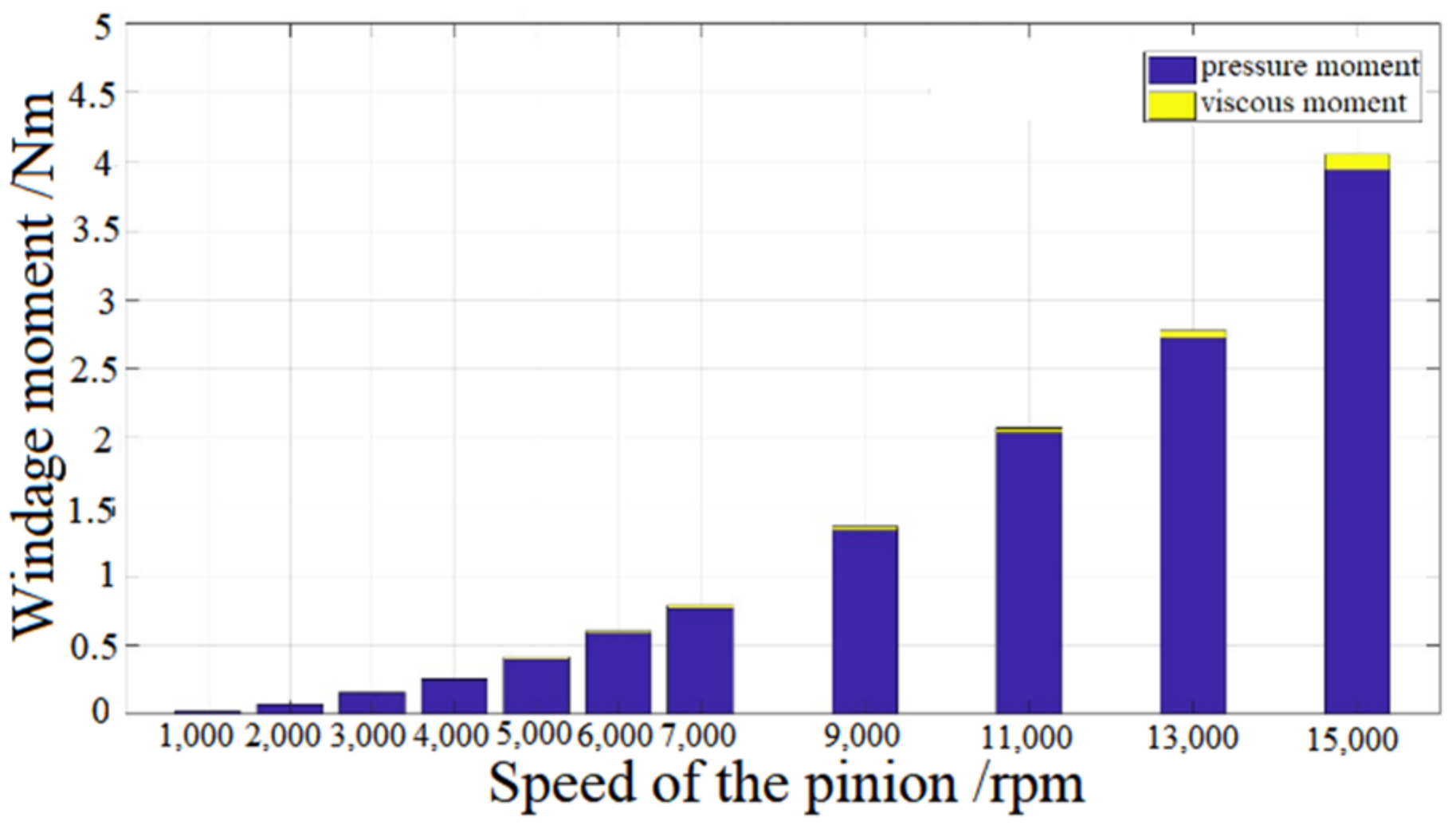
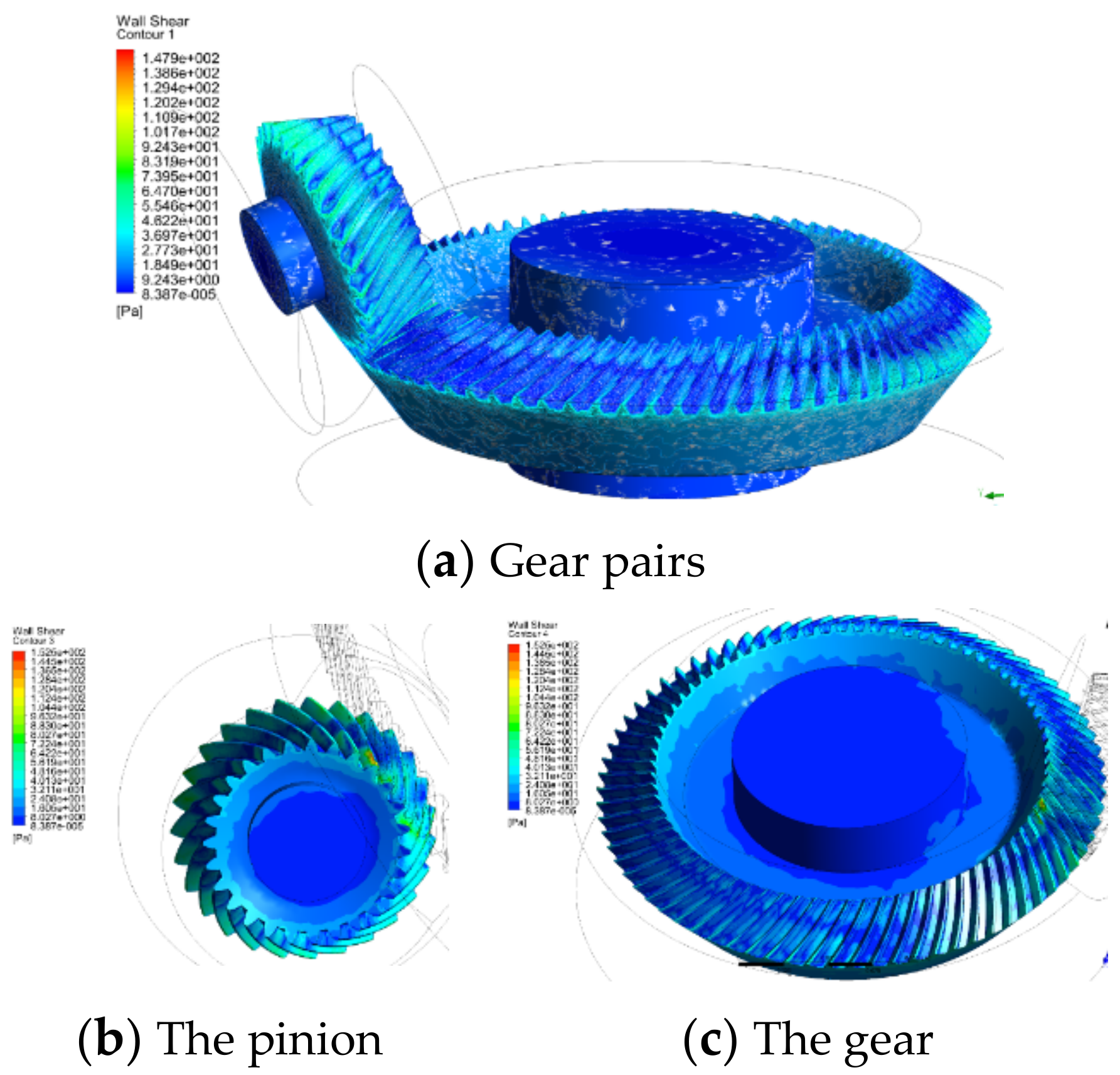
(3) The essence of gear windage loss is that the differential pressure torque and friction torque of the fluid, acting on each surface of the gear, make the gear lose part of its dynamic energy, which will be transformed into the kinetic energy and heat energy of the fluid around the gear.
(4) For all configurations of gears studied, the dominant physical mechanism contributing to windage losses is the pressure field associated with diversion and impingement of the high speed relative flow on the leading tooth surface.
(5) Based on the windage reduction mechanism of the shroud, this paper studied the optimization design principle of the shroud through orthogonal test and variance analysis, which revealed that the windage of the gear pair was the smallest when the gap of the windshield was 1 mm and the meshing opening was 30°.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}