Advanced High-Speed Lane Keeping System of Autonomous Vehicle with Sideslip Angle Estimation


Abstract
:1. Introduction
| Algorithm 1: The brief processing of proposed LKS controller |
| Proposed LKS controller Input: Output: |
| Step 1: Construct vehicle dynamic model and lane keeping model |
Step 2: Design upper controller
Step 5: Results estimation |
2. Related Models
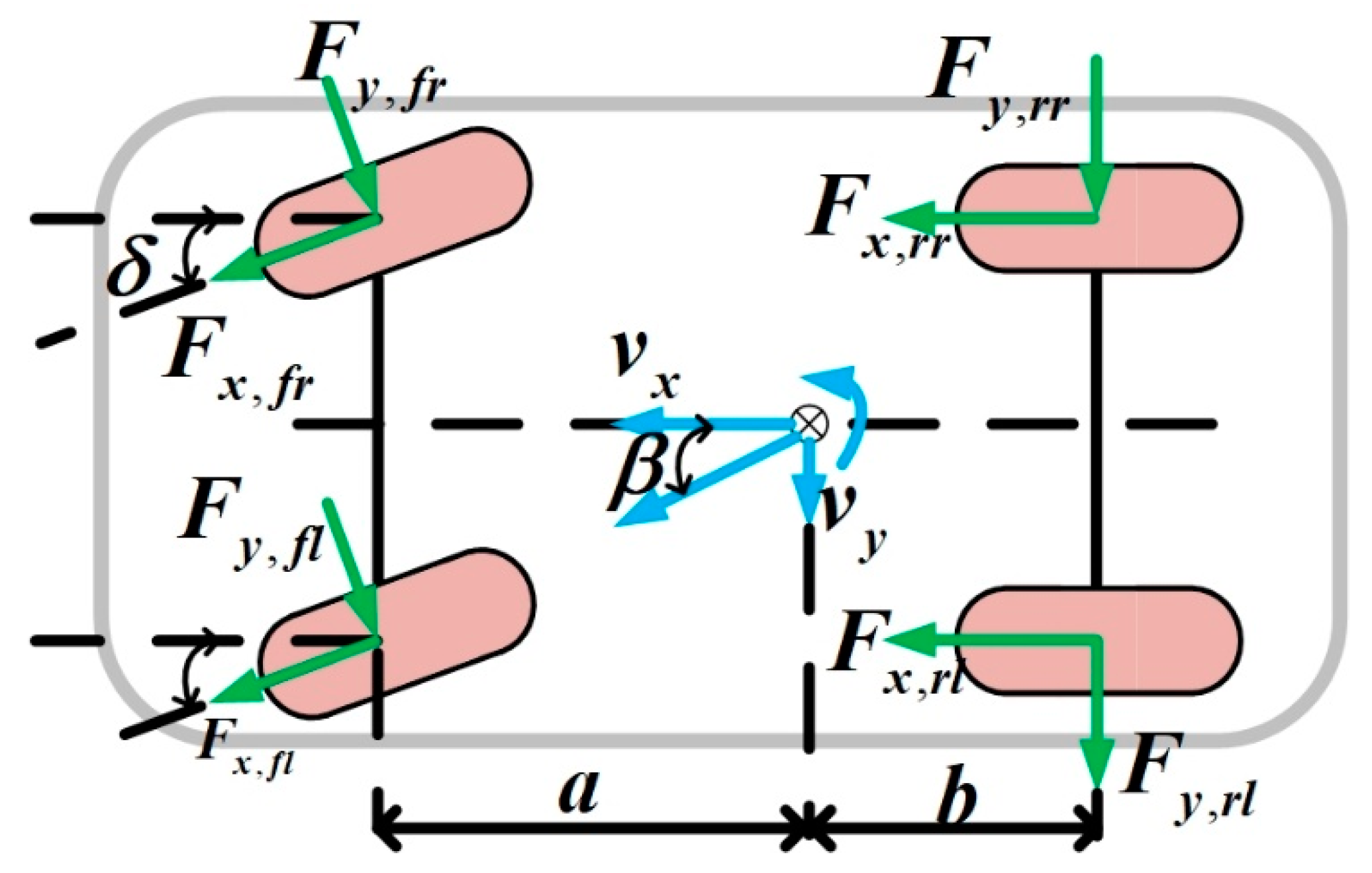
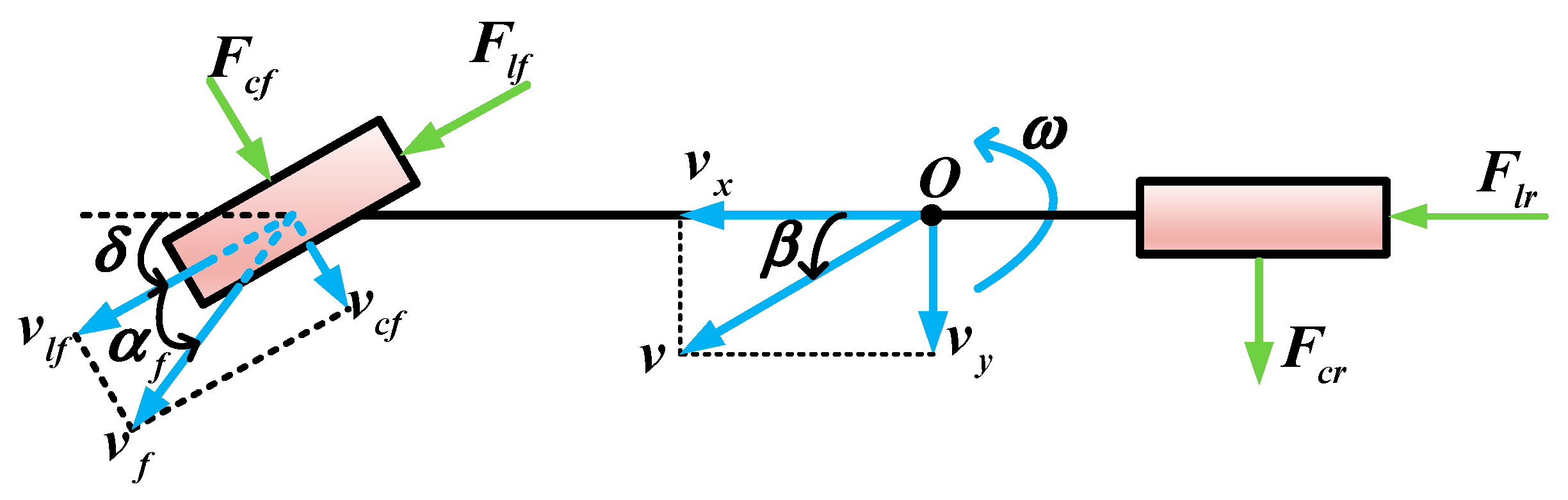
2.1. Vehicle Dynamic Model
2.2. Lane Keeping Model
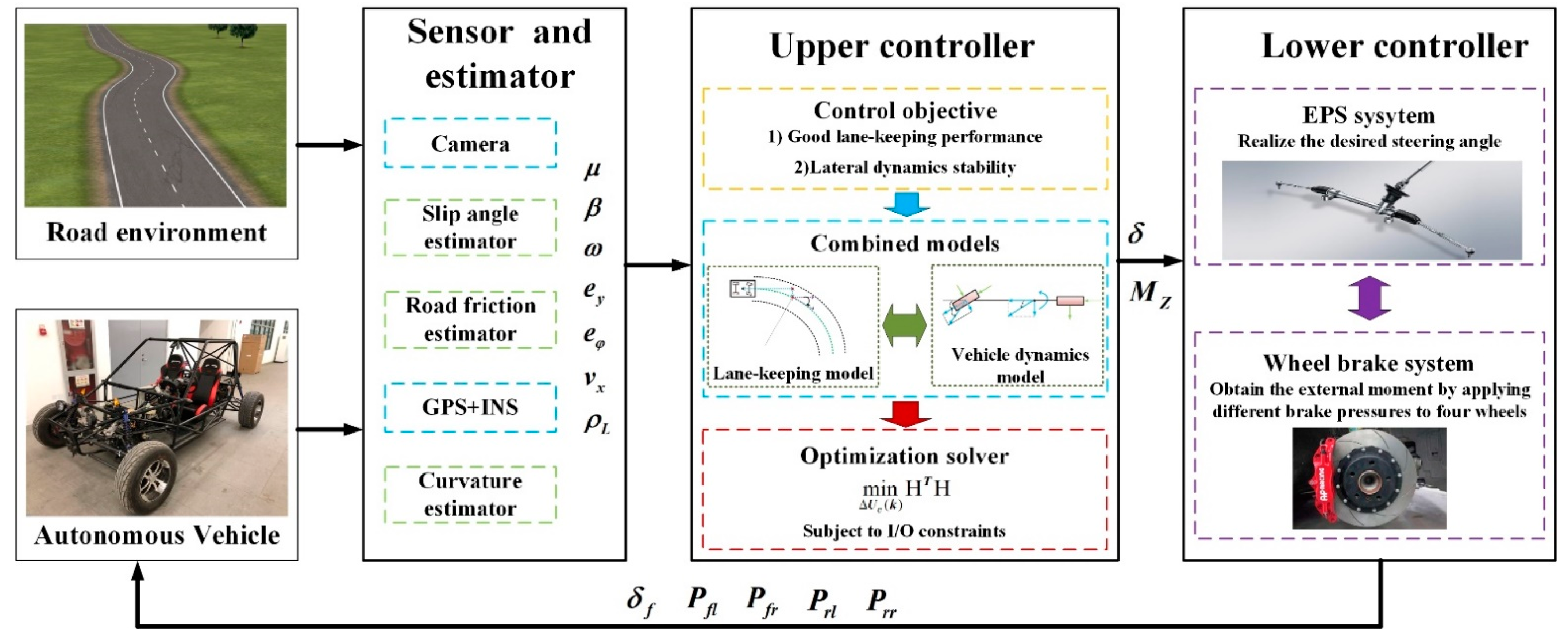
3. The Design of the Proposed LKS
3.1. Upper Controller
3.2. Lower Controller
4. ST-SRCKF-Based Sideslip Angle Estimator
4.1. Strong Tracking Theory
4.2. ST-SRCKF Estimator
4.2.1. Time Update
- The cubature points and propagated cubature points are calculated as follows:where is the cubature point, is the propagated cubature point, and denote the system state dimension, is the basic cubature point, and denotes the point from set .
- 2.
- The predicted state can be calculated as follows:
- 3.
- The square-root coefficient of the prediction error covariance matrix can be calculated as follows:where is the square-root coefficient of , and , means the weight coefficient, presents a general triangularization algorithm [29], and can be described as follows:
- 4.
- The prediction error covariance matrix can be calculated as follows:
4.2.2. Measurement Update
- The cubature points and propagated cubature points can be calculated as follows:
- 2.
- The predicted measurement can be calculated as follows:
- 3.
- The innovation covariance matrix and its square-root coefficient are calculated as follows:where is the square-root coefficient of , with , and the innovation covariance matrix can be described as follows:
- 4.
- The cross-covariance matrix can be calculated as follows:
- 5.
- The fading factor , based on Equations (51)–(53), is calculated.
- 6.
- The prediction error covariance matrix, with the modified fading factor and its square-root coefficient, is calculated as follows:
- 7.
- The modified square-root coefficient of innovation covariance matrix and the cross-covariance matrix are calculated by introducing the modified prediction error covariance matrix to Equations (60)–(65).
- 8.
- The gain matrix and evaluate cross-covariance matrix are calculated as follows:
- 9.
- The square-root coefficient of error covariance matrix is estimated as follows:
5. Results and Discussion
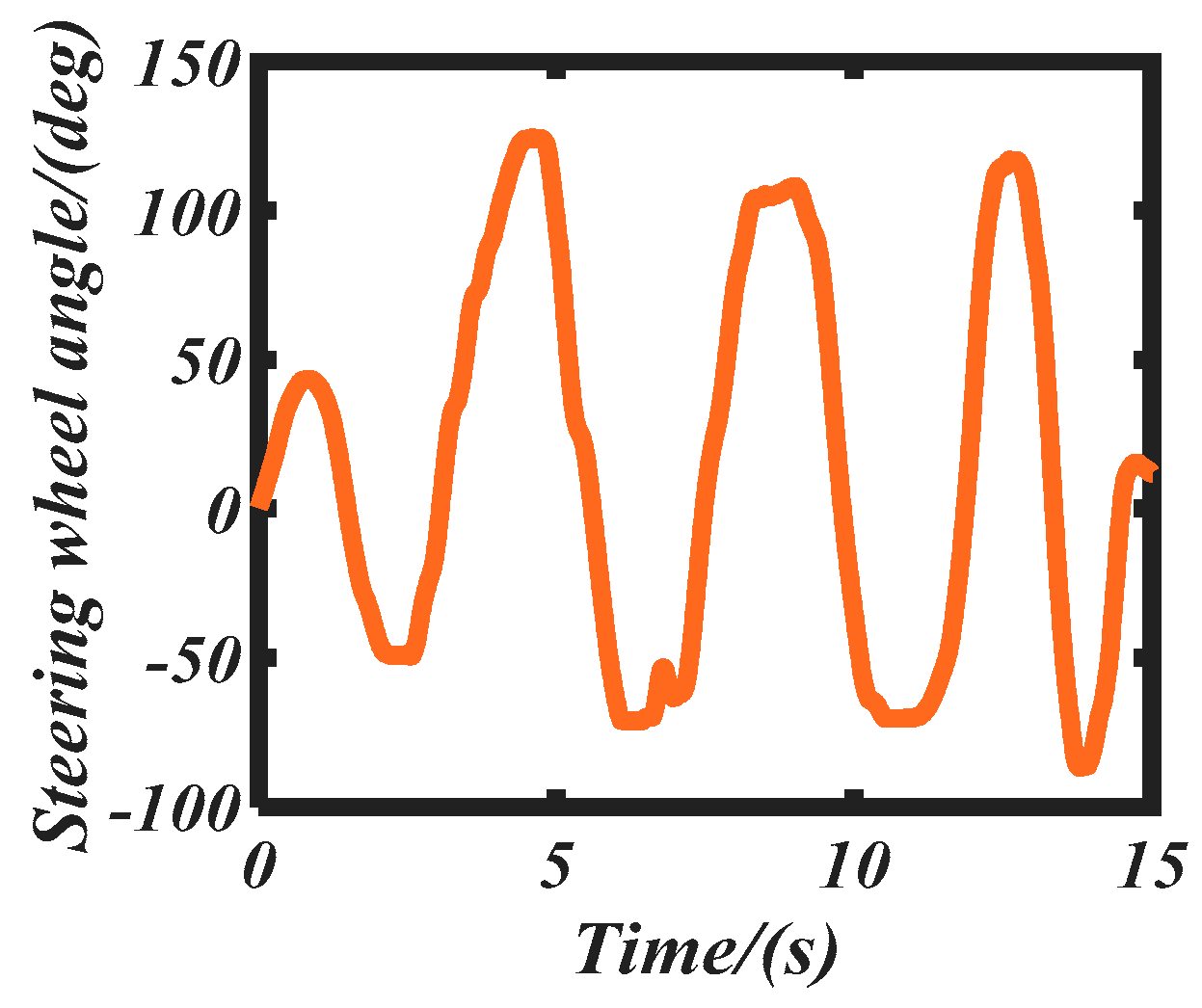
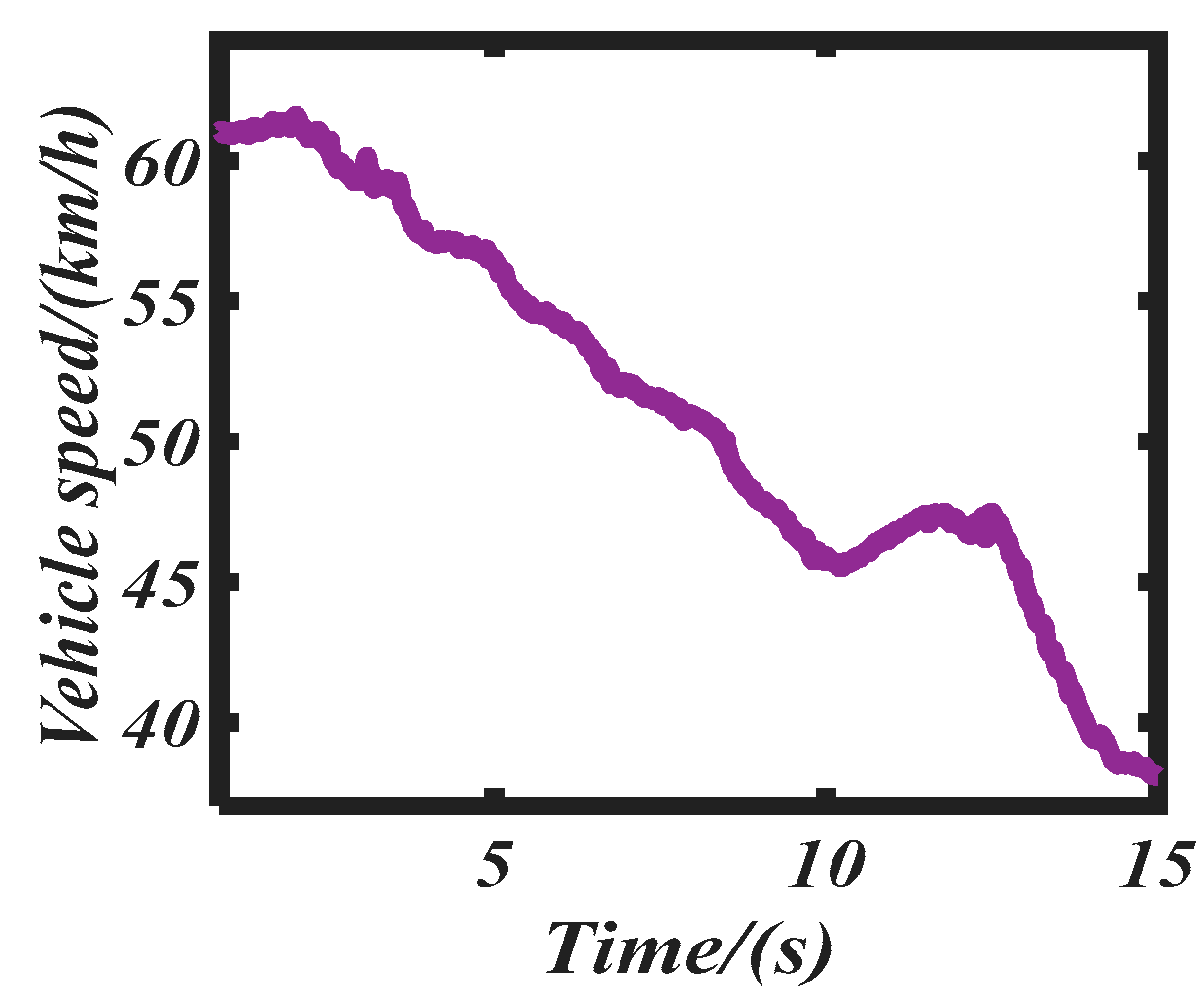
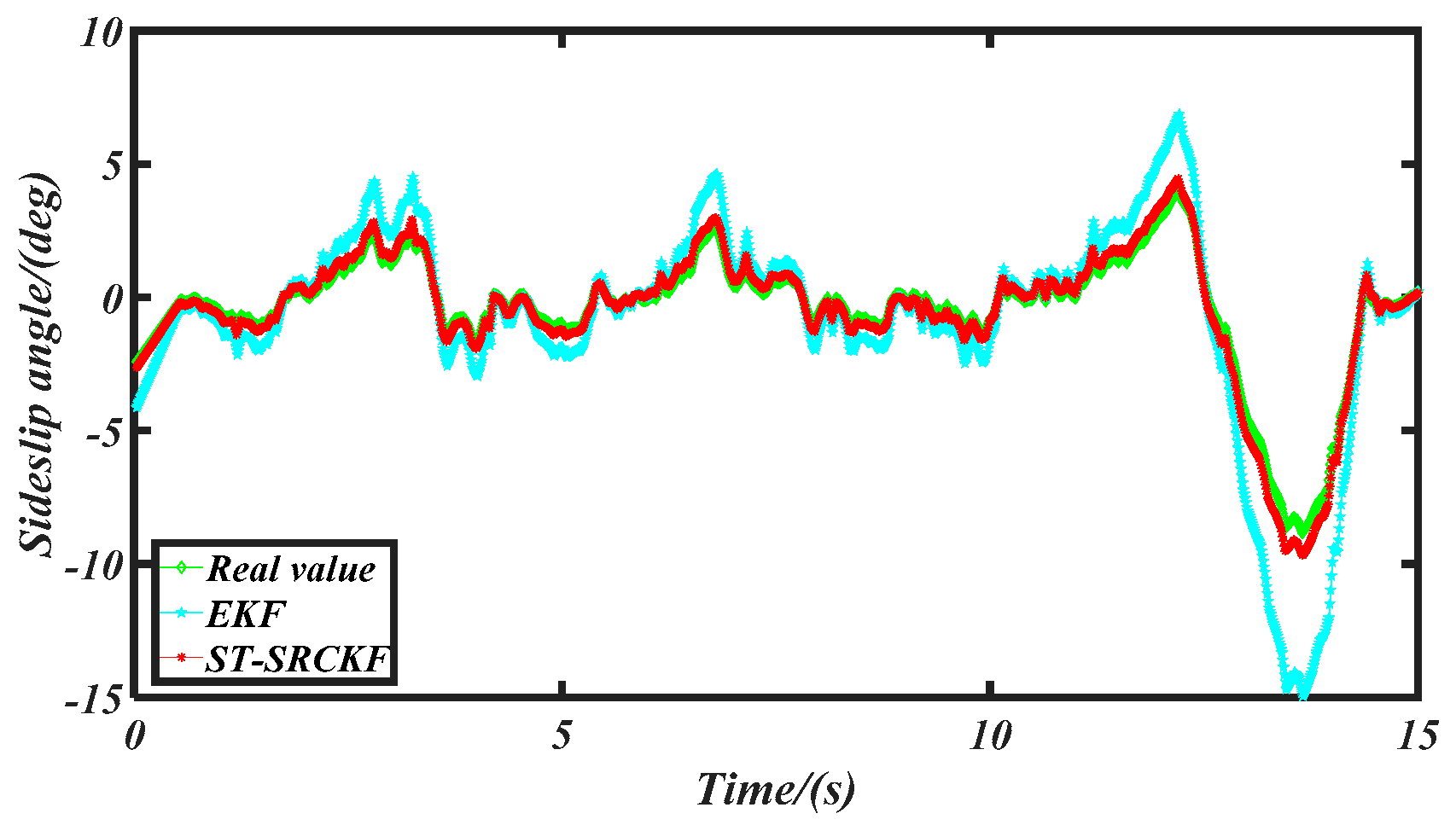
5.1. Sideslip Angle Estimation
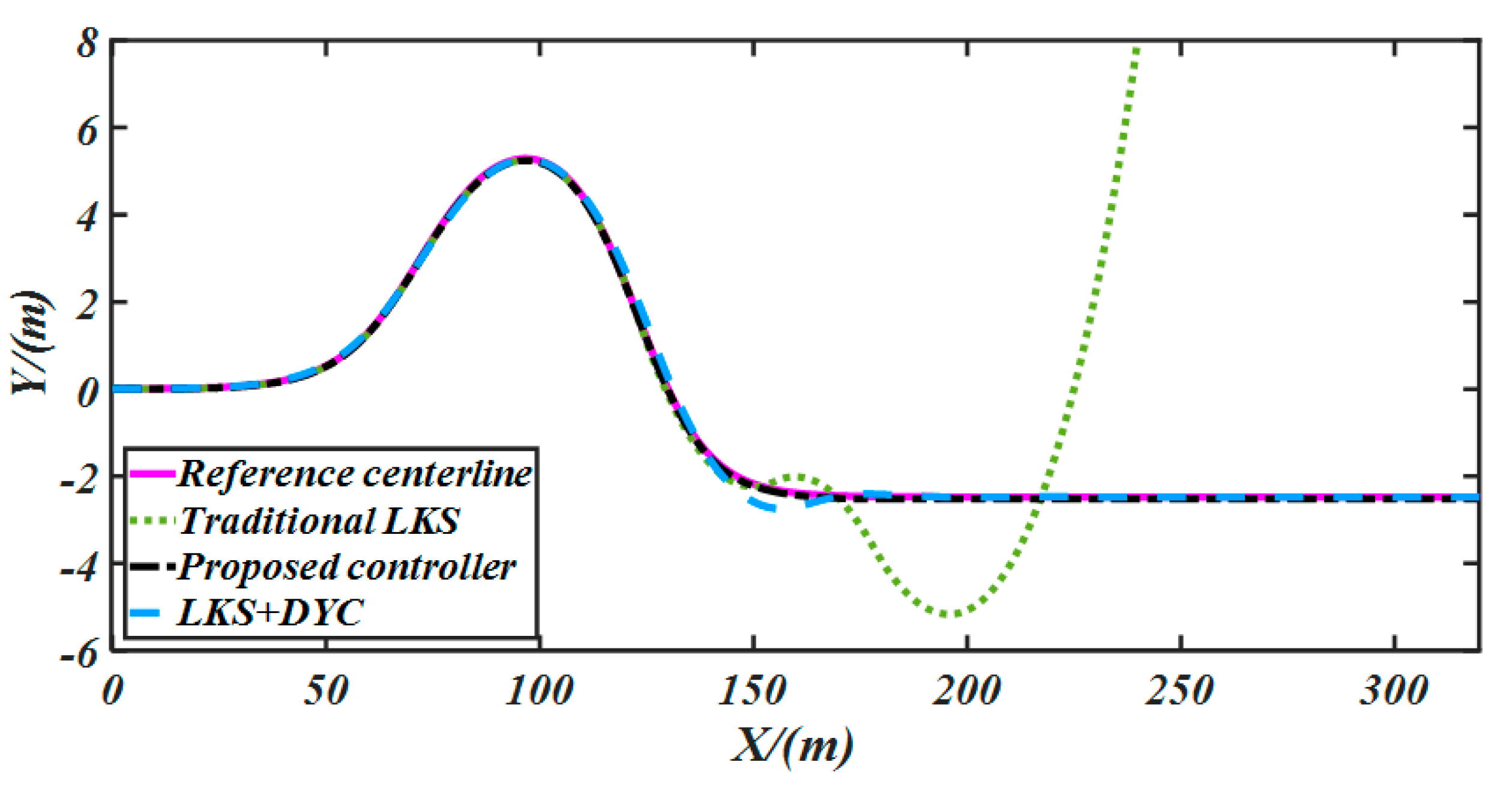
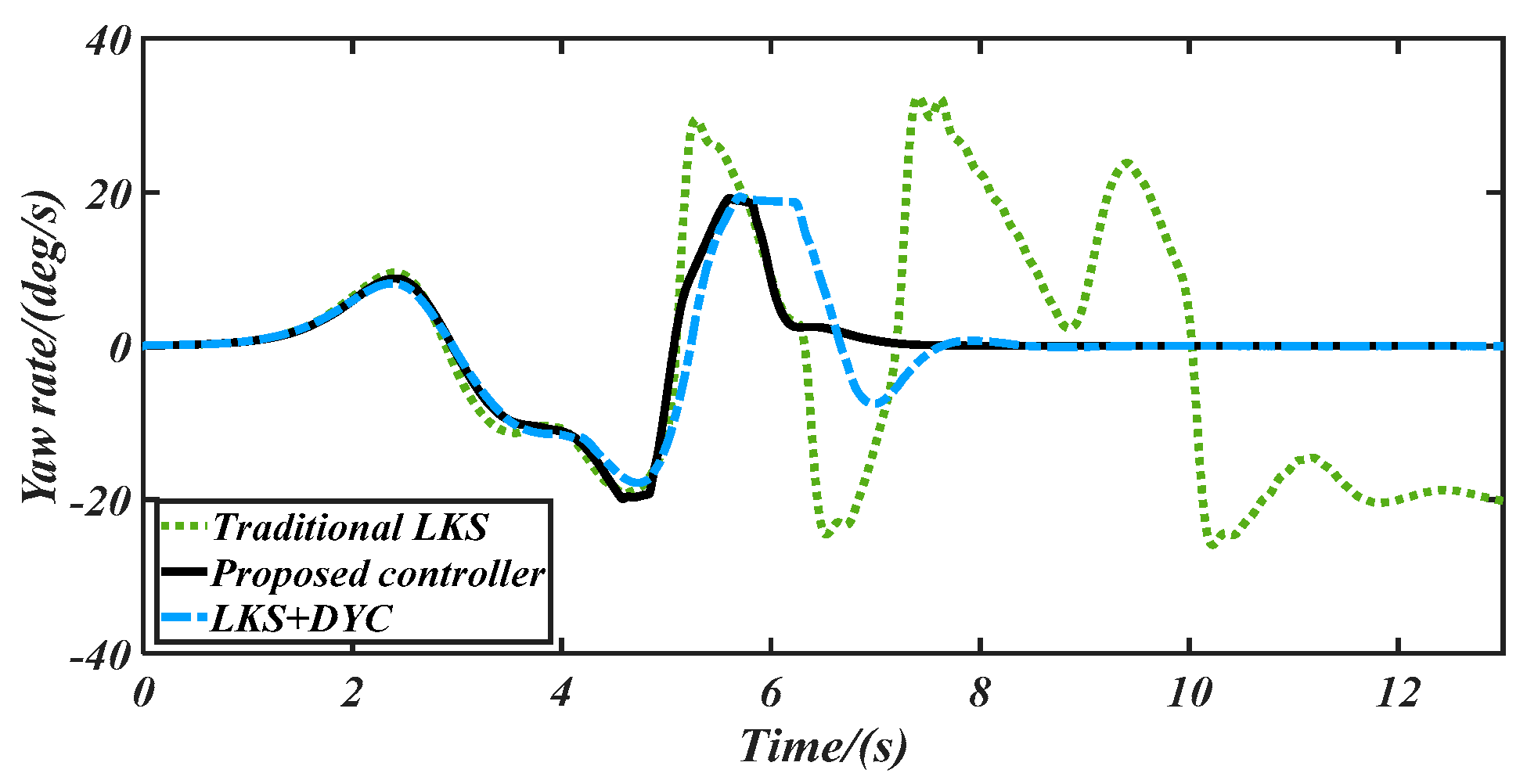
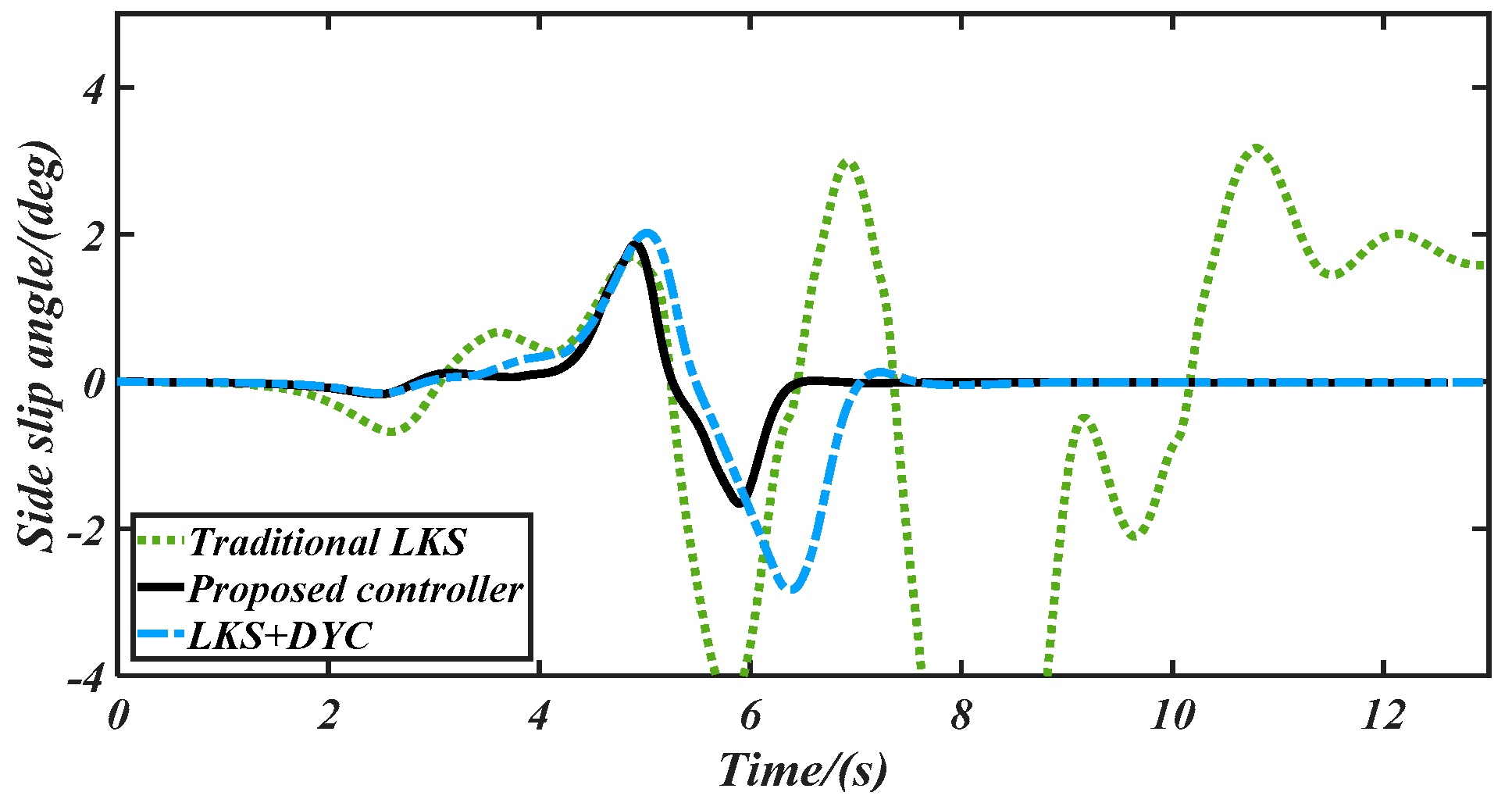
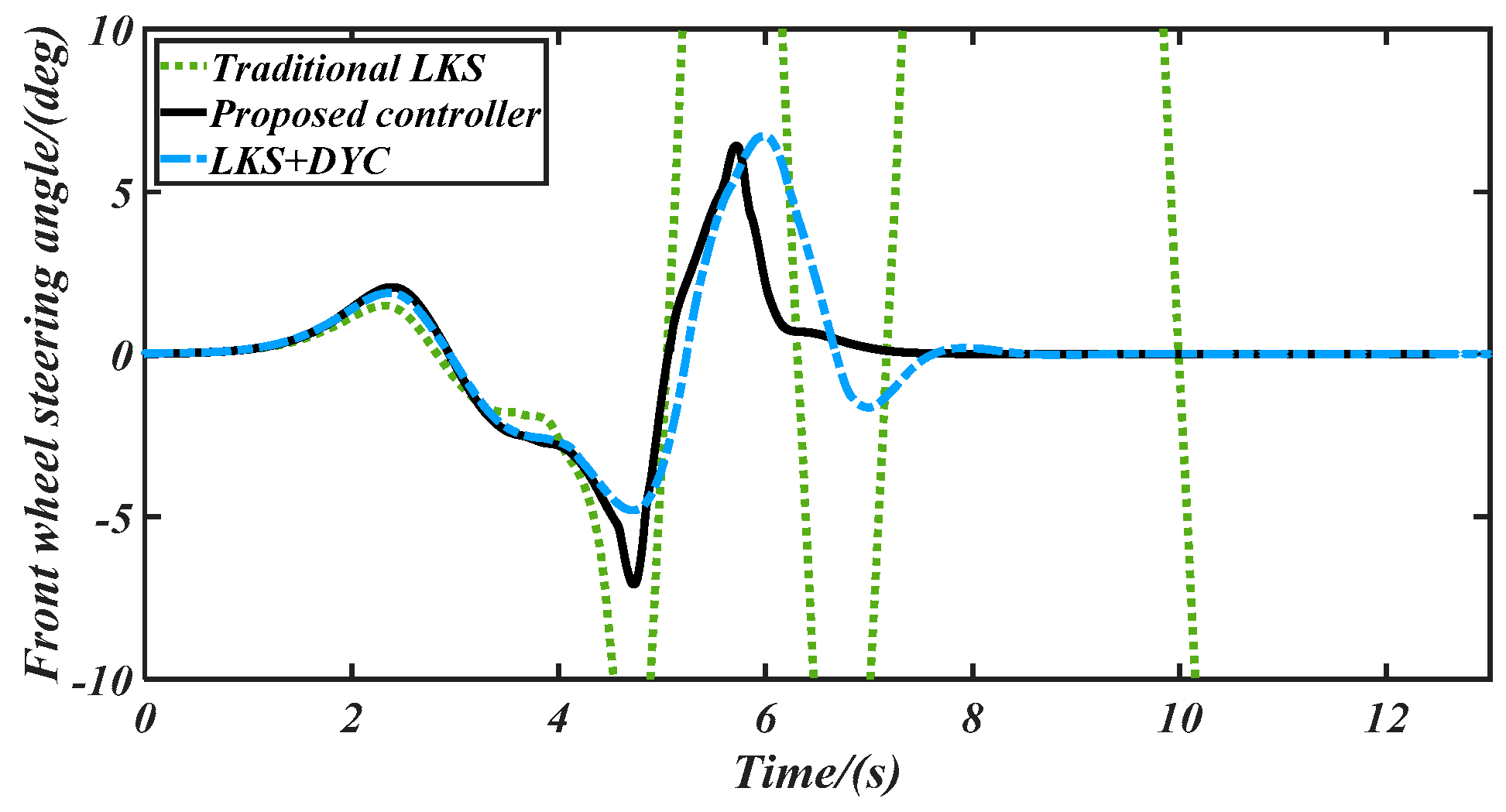
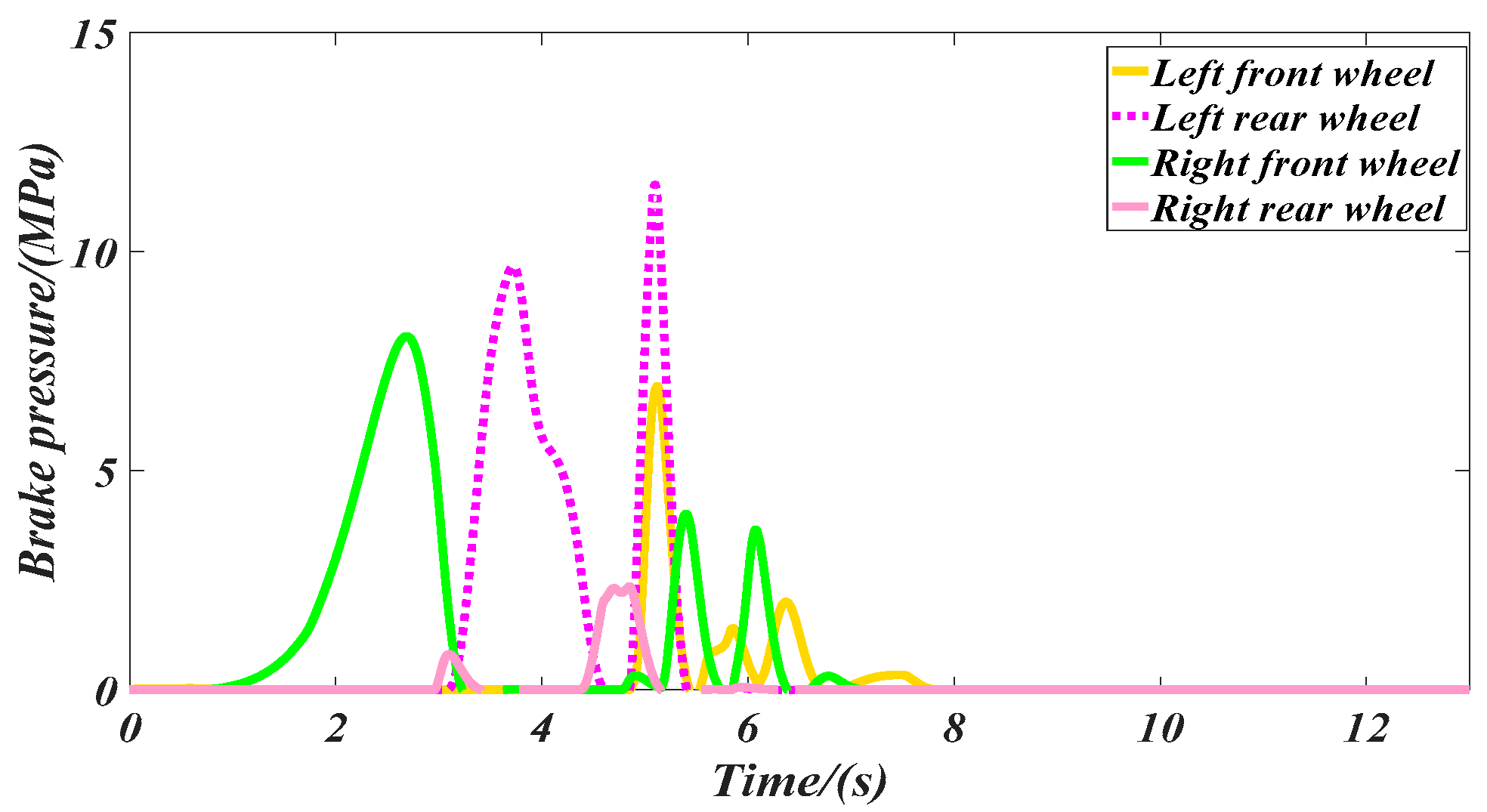
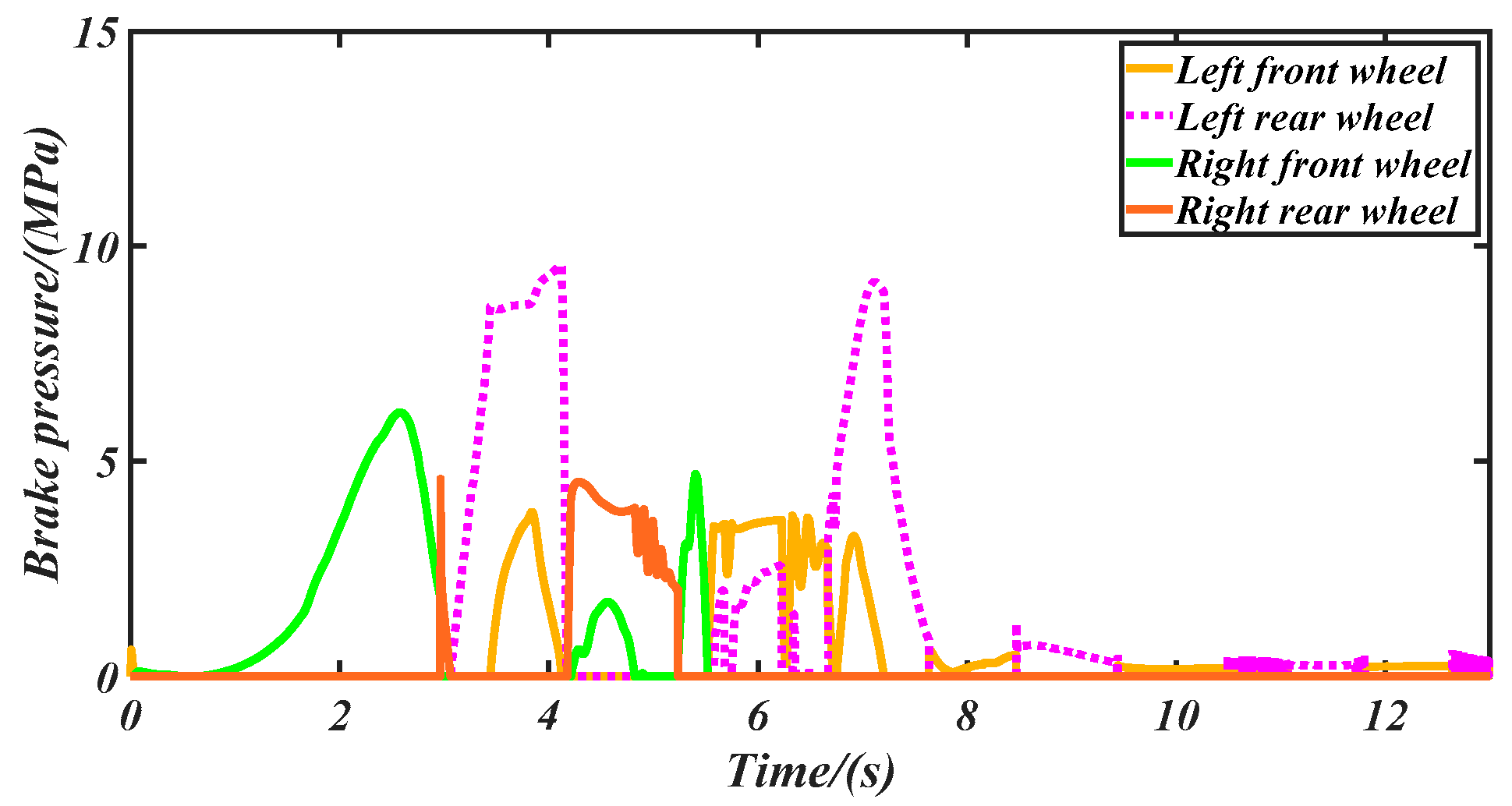
5.2. Lane Keeping Performance
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ou, D.; Liu, R.; Rasheed, L.; Shi, L.; Li, H. Operation performance of tram lanes with intermittent priority with the coexistence of regular and automatic vehicles. J. Intell. Transp. Syst. 2021, 1–12. [Google Scholar] [CrossRef]
- Rasheed, L.; Hu, F.; Zhang, L. Deep reinforcement learning approach for autonomous vehicle systems for maintaining security and safety using LSTM-GAN. Veh. Commun. 2020, 26, 100266. [Google Scholar] [CrossRef]
- Rasheed, L.; Hu, F.; Hong, Y.; Balasubramanian, B. Intelligent Vehicle Network Routing with Adaptive 3D Beam Alignment for mmWave 5G-Based V2X Communications. IEEE Trans. Intell. Transp. Syst. 2021, 5, 2706–2718. [Google Scholar] [CrossRef]
- Wang, H.; Liu, B.; Ping, X.; An, Q. Path Tracking Control for Autonomous Vehicles Based on an Improved MPC. IEEE Access 2019, 7, 161064–161073. [Google Scholar] [CrossRef]
- Lu, S.; Cen, S.; Hu, X. Integrated Control of Braking and Steering Subsystems for Autonomous Vehicle based on an Efficient Yaw Moment Distribution. IEEE Trans. Ind. Electron. 2017. [Google Scholar] [CrossRef]
- Pappalardo, G.; Cafiso, S.; Graziano, A.; Severino, A. Decision Tree Method to Analyze the Performance of Lane Support Systems. Sustainability 2021, 13, 846. [Google Scholar] [CrossRef]
- Cafiso, S.; Pappalardo, G. Safety effectiveness and performance of lane support systems for driving assistance and automation—Experimental test and logistic regression for rare events. Accid. Anal. Prev. 2020, 148, 105791. [Google Scholar] [CrossRef]
- Yan, F.; Wang, K.; Zou, B. LiDAR-based Multi-Task Road Perception Network for Autonomous Vehicles. IEEE Access 2020, 8, 86753–86764. [Google Scholar] [CrossRef]
- Fahmy, H.; Ghany, M.; Baumann, G. Vehicle Risk Assessment and Control for Lane-Keeping and Collision Avoidance at Low-Speed and High-Speed Scenarios. IEEE Trans. Veh. Technol. 2018, 67, 4806–4818. [Google Scholar] [CrossRef]
- Ji, J.; Khajepour, A.; Melek, W.; Huang, Y. Path Planning and Tracking for Vehicle Collision Avoidance Based on Model Predictive Control with Multiconstraints. IEEE Trans. Veh. Technol. 2017, 66, 952–964. [Google Scholar] [CrossRef]
- Nguyen, A.; Sentouh, C.; Popieul, J. Driver-automation cooperative approach for shared steering control under multiple system constraints: Design and experiments. IEEE Trans. Ind. Electron. 2017, 64, 3819–3830. [Google Scholar] [CrossRef]
- Saleh, L.; Chevrel, P.; Claveau, F.; Lafay, J.; Mars, F. Shared steering control between a driver and an automation: Stability in the presence of driver behavior uncertainty. IEEE Trans. Intell. Transp. Syst. 2013, 14, 974–983. [Google Scholar] [CrossRef]
- Sentouh, C.; Soualmi, B.; Popieul, J.; Debernard, S. Cooperative steering assist control system. In Proceedings of the IEEE International Conference on Systems, Man and Cybernetics, Manchester, UK, 13–16 October 2013. [Google Scholar]
- Parr, G.; Hailes, S.; How, J.; McGeehan, J.; Guo, Y. Guest Editorial: Communications Challenges and Dynamics for Unmanned Autonomous Vehicles. IEEE J. Sel. Area. Commun. 2012, 30, 849–851. [Google Scholar] [CrossRef]
- Li, L.; Jia, G.; Chen, J.; Zhu, H.; Cao, D.; Song, J. A novel vehicle dynamics stability control algorithm based on the hierarchical strategy with constrain of nonlinear tyre forces. Veh. Syst. Dyn. 2015, 53, 1093–1116. [Google Scholar] [CrossRef]
- Nagai, M.; Shino, M.; Gao, F. Study on integrated control of active front steer angle and direct yaw moment. JSAE Rev. 2002, 23, 309–315. [Google Scholar] [CrossRef]
- Cheng, S.; Li, L.; Mei, M.; Nie, Y.; Zhao, L. Multiple-Objective Adaptive Cruise Control System Integrated with DYC. IEEE Trans. Veh. Technol. 2019, 68, 4550–4559. [Google Scholar] [CrossRef]
- Shuai, Z.; Zhang, H.; Wang, J.; Li, J.; Ouyang, M. Combined AFS and DYC control of four-wheel-independent-drive electric vehicles over CAN network with time-varying delays. IEEE Trans. Veh. Technol. 2014, 63, 591–601. [Google Scholar] [CrossRef]
- Ni, J.; Hu, J. Dynamics control of autonomous vehicle at driving limits and experiment on an autonomous formula racing car. Mech. Syst. Signal Process. 2017, 90, 154–174. [Google Scholar] [CrossRef]
- Li, L.; Jia, G.; Ran, X.; Song, J.; Wu, K. A variable structure extended Kalman filter for vehicle sideslip angle estimation on a low friction road. Veh. Syst. Dyn. 2014, 52, 280–308. [Google Scholar] [CrossRef]
- Li, L.; Lu, Y.; Wang, R.; Chen, J. A Three-Dimensional Dynamics Control Framework of Vehicle Lateral Stability and Rollover Prevention via Active Braking With MPC. IEEE Trans. Ind. Electron. 2017, 4, 3389–3401. [Google Scholar] [CrossRef]
- Cheng, S.; Li, L.; Guo, H.; Chen, Z.; Song, P. Longitudinal Collision Avoidance and Lateral Stability Adaptive Control System Based on MPC of Autonomous Vehicles. IEEE Trans. Intell. Transp. Syst. 2020, 21, 2376–2385. [Google Scholar] [CrossRef]
- Zhang, H.; Wang, J. Vehicle lateral dynamics control through AFS/DYC and robust gain-scheduling approach. IEEE Trans. Veh. Technol. 2016, 65, 489–494. [Google Scholar] [CrossRef]
- Guo, J.; Luo, Y.; Li, K.; Dai, Y. Coordinated path-following and direct yaw-moment control of autonomous electric vehicles with sideslip angle estimation. Mech. Syst. Signal Process. 2018, 105, 183–199. [Google Scholar] [CrossRef]
- Guo, J.; Li, L.; Li, K.; Wang, R. An adaptive fuzzy-sliding lateral control strategy of automated vehicles based on vision navigation. Veh. Syst. Dyn. 2013, 51, 1502–1517. [Google Scholar] [CrossRef]
- Guo, J.; Hu, P.; Wang, R. Nonlinear coordinated steering and braking control of vision-based autonomous vehicles in emergency obstacle avoidance. IEEE Trans. Intell. Transp. Syst. 2016, 17, 3230–3240. [Google Scholar] [CrossRef]
- Choi, M.; Choi, S. Model predictive control for vehicle yaw stability with practical concerns. IEEE Trans. Veh. Technol. 2014, 63, 3539–3548. [Google Scholar] [CrossRef]
- Jwo, D.; Yang, C.; Chuang, C. Performance enhancement for ultra-tight GPS/INS integration using a fuzzy adaptive strong tracking unscented Kalman filter, Nonlinear Dynamics. Nonlinear Dyn. 2013, 73, 377–395. [Google Scholar] [CrossRef]
- Arasaratnam, I.; Haykin, S. Cubature Kalman filters. IEEE Trans. Autom. Control 2009, 54, 1254–1269. [Google Scholar] [CrossRef] [Green Version]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ZO | PS | PB | ||
|---|---|---|---|---|
| ZO | ZO | PM | PB | |
| PS | PS | PS | PB | |
| PB | ZO | PS | PM | |
| ZO | PS | PB | ||
|---|---|---|---|---|
| ZO | ZO | PS | ZO | |
| PS | PM | PS | PS | |
| PB | PB | PB | PM | |
| Road Type | Highway |
|---|---|
| Lane number | Two |
| Maximum curvature | 0.0281 |
| Minimum curvature | −0.029 |
| Road length | 500 m |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, H.; Liu, B.; Qiao, J. Advanced High-Speed Lane Keeping System of Autonomous Vehicle with Sideslip Angle Estimation. Machines 2022, 10, 257. https://doi.org/10.3390/machines10040257
Wang H, Liu B, Qiao J. Advanced High-Speed Lane Keeping System of Autonomous Vehicle with Sideslip Angle Estimation. Machines. 2022; 10(4):257. https://doi.org/10.3390/machines10040257
Chicago/Turabian StyleWang, Hengyang, Biao Liu, and Junchao Qiao. 2022. "Advanced High-Speed Lane Keeping System of Autonomous Vehicle with Sideslip Angle Estimation" Machines 10, no. 4: 257. https://doi.org/10.3390/machines10040257
APA StyleWang, H., Liu, B., & Qiao, J. (2022). Advanced High-Speed Lane Keeping System of Autonomous Vehicle with Sideslip Angle Estimation. Machines, 10(4), 257. https://doi.org/10.3390/machines10040257